v8.01.116 FDLV116 - Réponse dynamique d’un barrage avec couplage fluide-structure#
Résumé:
L’objectif de ce test est de comparer deux différentes modélisations des éléments fluides pour la réponse dynamique d’un barrage avec couplage fluide-structure.
Solution de référence#
Méthode de calcul#
Ce cas-test vise à comparer deux différentes formulations pour les éléments fluides. On aura donc des comparaisons exclusivement numériques.
Grandeurs et résultats de référence#
Afin de choisir un point de comparaison intéressant, on trace l’accélération au point de post-traitement C avec et sans frontière fluide dans le cas de la formulation \((u,p)\) . Comme on peut observer dans la , l’absence de la frontière fluide provoque un effet de déphasage dû aux ondes parasites de la frontière gauche du fluide.
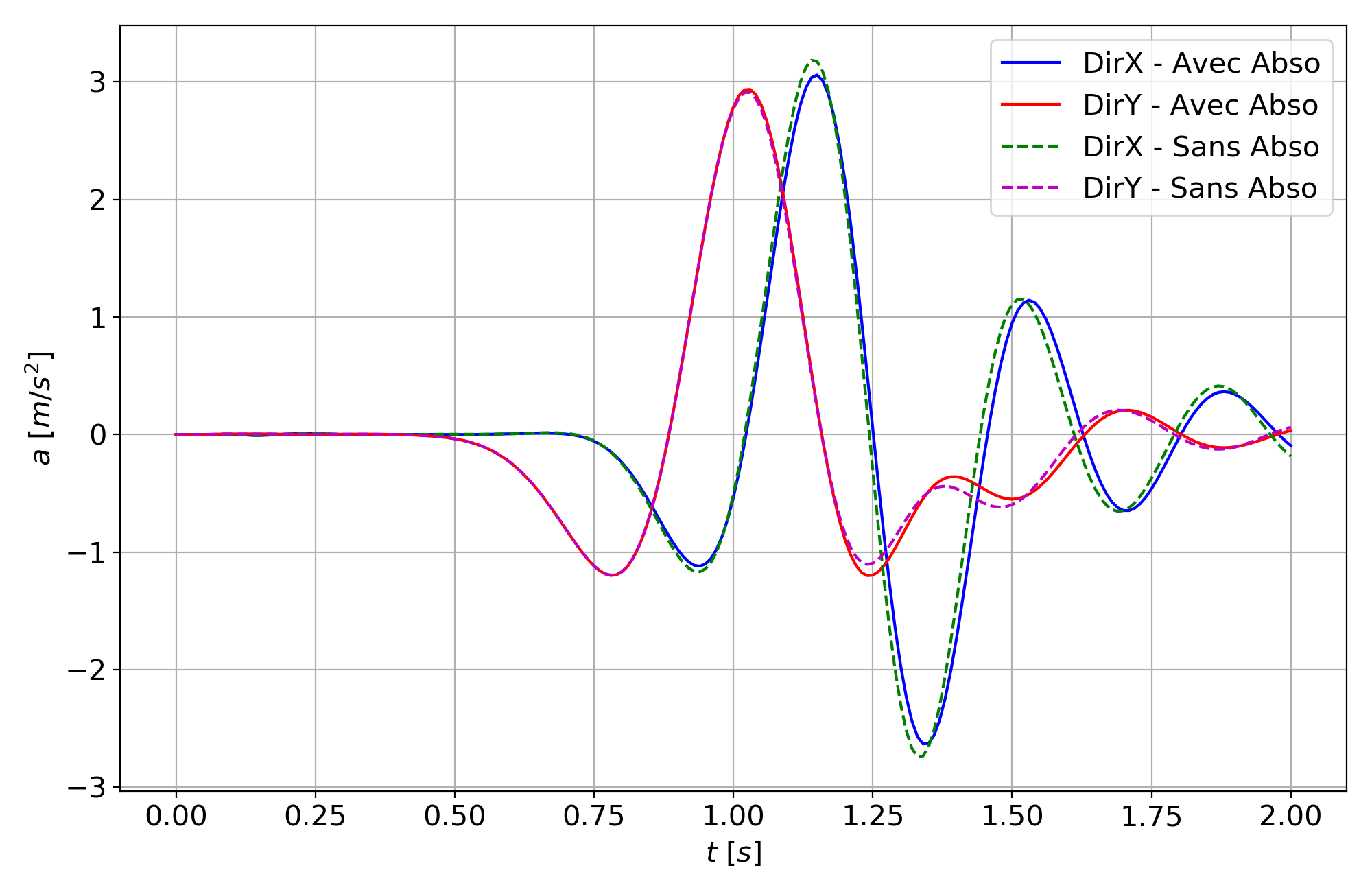
Figure 2.2-a : Accélération au point de post-traitement C avec et sans frontière absorbante fluide
Modélisation A#
Caractéristiques de la modélisation#
On utilise une modélisation 2D_FLUIDE, D_PLAN, 2D_FLUI_STRU, D_PLAN_ABSO et 2D_FLUI_ABSO en dynamique linéaire IFS couplé (formulation \((u,p,\varphi )\) ).
Cette modélisation est créé pour calculer une base de comparaison pour la formulation \((u,p)\) .
Caractéristiques du maillage#
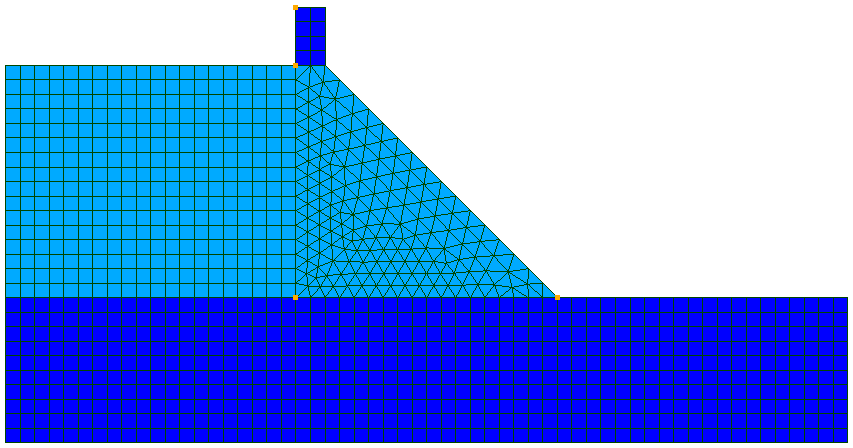
Figure 3.2-a : Maillage du barrage 2D
Dans la on montre le maillage du barrage qui sera composé de 908 éléments surfaciques quadrangulaires linéaires, 324 éléments surfaciques triangulaires linéaires et 1151 nœuds.
Grandeurs testées et résultats#
On teste les accélérations à l’instant \(t=0.98s\) aux points de post-traitement pour les directions X et Y:
Tableau 3.3-1 : Grandeurs testées pour la modélisation A
Identification |
Type de référence |
Nœud A-AX |
NON_REGRESSION |
Nœud A-AY |
NON_REGRESSION |
Nœud B-AX |
NON_REGRESSION |
Nœud B-AY |
NON_REGRESSION |
Nœud C-AX |
NON_REGRESSION |
Nœud C-AY |
NON_REGRESSION |
Nœud D-AX |
NON_REGRESSION |
Nœud D-AY |
NON_REGRESSION |
On ne peut rien dire dans l’absolu sur la précision de ces valeurs car on teste des valeurs de non-régression.
Modélisation B#
Caractéristiques de la modélisation#
On utilise une modélisation 2D_FLUIDE, D_PLAN, 2D_FLUI_STRU, D_PLAN_ABSO et 2D_FLUI_ABSO en dynamique linéaire IFS couplé (formulation \((u,p)\) ).
Caractéristiques du maillage#
Le caractéristiques du maillage sont identiques à la modélisation A (voir paragraphe 3.2 ).
Grandeurs testées et résultats#
On teste les accélérations à l’instant \(t=0.98s\) aux points de post-traitement pour les directions X et Y:
Tableau 4.3-1 : Grandeurs testées pour la modélisation B
Identification |
Type de référence |
Nœud A-AX |
AUTRE_ASTER |
Nœud A-AY |
AUTRE_ASTER |
Nœud B-AX |
AUTRE_ASTER |
Nœud B-AY |
AUTRE_ASTER |
Nœud C-AX |
AUTRE_ASTER |
Nœud C-AY |
AUTRE_ASTER |
Nœud D-AX |
AUTRE_ASTER |
Nœud D-AY |
AUTRE_ASTER |
Ces valeurs sont comparés directement avec la solution obtenue dans la modélisation A. De façon générale, les valeurs obtenus sont très proches avec un erreur maximale inférieur au 1.e-08% .
Modélisation C#
Caractéristiques de la modélisation#
On utilise une modélisation 3D_FLUIDE, 3D, FLUI_STRU, 3D_ABSO et 3D_FLUI_ABSO en dynamique linéaire IFS couplé (formulation \((u,p)\) ).
Caractéristiques du maillage#
Le maillage est généré en extrudant le maillage 2D des modélisations A et B d’un seul élément dans la profondeur. Ce maillage contient 908 hexaèdres linéaires, 324 prismes linéaires et 2302 nœuds.
Grandeurs testées et résultats#
On teste les accélérations à l’instant \(t=0.98s\) aux points de post-traitement pour les directions X et Y:
Tableau 5.3-1 : Grandeurs testées pour la modélisation C
Identification |
Type de référence |
Nœud A-AX |
AUTRE_ASTER |
Nœud A-AY |
AUTRE_ASTER |
Nœud B-AX |
AUTRE_ASTER |
Nœud B-AY |
AUTRE_ASTER |
Nœud C-AX |
AUTRE_ASTER |
Nœud C-AY |
AUTRE_ASTER |
Nœud D-AX |
AUTRE_ASTER |
Nœud D-AY |
AUTRE_ASTER |
Ces valeurs sont comparés directement avec la solution obtenue dans la modélisation B. De façon générale, les valeurs obtenus sont pratiquementidentiques avec un erreur maximale inférieur au 1e-08% .
Modélisation D#
Caractéristiques de la modélisation#
On utilise une modélisation 2D_FLUIDE, D_PLAN, 2D_FLUI_STRU, D_PLAN_ABSO et 2D_FLUI_ABSO en dynamique linéaire IFS couplé (formulation \((u,\psi )\) ).
Caractéristiques du maillage#
Le caractéristiques du maillage sont identiques à la modélisation A (voir paragraphe 3.2 ).
Grandeurs testées et résultats#
On teste les accélérations à l’instant \(t=0.98s\) aux points de post-traitement pour les directions X et Y:
Tableau 6.3-1: Grandeurs testées pour la modélisation D
Identification |
Type de référence |
Nœud A-AX |
AUTRE_ASTER |
Nœud A-AY |
AUTRE_ASTER |
Nœud B-AX |
AUTRE_ASTER |
Nœud B-AY |
AUTRE_ASTER |
Nœud C-AX |
AUTRE_ASTER |
Nœud C-AY |
AUTRE_ASTER |
Nœud D-AX |
AUTRE_ASTER |
Nœud D-AY |
AUTRE_ASTER |
Ces valeurs sont comparés directement avec la solution obtenue dans la modélisation B. De façon générale, les valeurs obtenus sont très proches avec un erreur maximale inférieur au 1.e-08% .
Modélisation E#
Caractéristiques de la modélisation#
On utilise une modélisation 3D_FLUIDE, 3D, FLUI_STRU, 3D_ABSO et 3D_FLUI_ABSO en dynamique linéaire IFS couplé (formulation \((u,\psi )\) ).
Caractéristiques du maillage#
Le caractéristiques du maillage sont identiques à la modélisation C (voir paragraphe 5.2 ).
Grandeurs testées et résultats#
On teste les accélérations à l’instant \(t=0.98s\) aux points de post-traitement pour les directions X et Y:
Tableau 7.3-1: Grandeurs testées pour la modélisation E
Identification |
Type de référence |
Nœud A-AX |
AUTRE_ASTER |
Nœud A-AY |
AUTRE_ASTER |
Nœud B-AX |
AUTRE_ASTER |
Nœud B-AY |
AUTRE_ASTER |
Nœud C-AX |
AUTRE_ASTER |
Nœud C-AY |
AUTRE_ASTER |
Nœud D-AX |
AUTRE_ASTER |
Nœud D-AY |
AUTRE_ASTER |
Ces valeurs sont comparés directement avec la solution obtenue dans la modélisation D. De façon générale, les valeurs obtenus sont pratiquementidentiques avec un erreur maximale de l’ordre du 1e-08% .
Modélisation F, G, H, I, J, K#
Pour les modélisations de F à K on va tester les mêmes calculs avec les trois formulations mais à l’aide de DYNA_NON_LINE. Dans le on fournit les caractéristiques de ces modélisations.
Tableau 8-1: Caractéristiques des modélisations F,G,H,I,J et K
Modélisation |
Formulation |
Dimension |
Référence |
F |
\((u,p,\varphi )\) |
2D |
Modélisation A |
G |
\((u,p,\varphi )\) |
3D |
Modélisation F |
H |
\((u,p)\) |
2D |
Modélisation F |
I |
\((u,p)\) |
3D |
Modélisation H |
J |
\((u,\psi )\) |
2D |
Modélisation F |
K |
\((u,\psi )\) |
3D |
Modélisation J |
De façon générale, les valeurs obtenus sont très proches des valeurs de référence avec un erreur maximale inférieur au 1.e-08% .
Modélisation L, M, N, O, P, Q, R, S, T#
Pour les modélisations de L à T, on va tester les mêmes calculs avec les trois formulations mais avec l’ajout de la frontière absorbante de première ordre.Pour cela il faut juste définir, parmi les caractéristiques matériaux du fluide, le paramètre géométrique LONG_CARA. Dans ces modélisations on a choisit LONG_CARA = 40.Dans le on fournit les caractéristiques de ces modélisations.
Tableau 9-1: Caractéristiques des modélisations F,G,H,I,J et K
Modélisation |
Formulation |
Dimension |
Référence |
Opérateur |
L |
\((u,p,\varphi )\) |
2D |
Non régression |
DYNA_VIBRA |
M |
\((u,p,\varphi )\) |
2D |
Modélisation L |
DYNA_NON_LINE |
N |
\((u,p,\varphi )\) |
3D |
Modélisation M |
DYNA_NON_LINE |
O |
\((u,p)\) |
2D |
Modélisation L |
DYNA_VIBRA |
P |
\((u,p)\) |
2D |
Modélisation O |
DYNA_NON_LINE |
Q |
\((u,p)\) |
3D |
Modélisation P |
DYNA_NON_LINE |
R |
\((u,\psi )\) |
2D |
Modélisation L |
DYNA_VIBRA |
S |
\((u,\psi )\) |
2D |
Modélisation R |
DYNA_NON_LINE |
T |
\((u,\psi )\) |
3D |
Modélisation S |
DYNA_NON_LINE |
De façon générale, les valeurs obtenus sont très proches des valeurs de référence avec un erreur maximale inférieur au 1.e-08% .
Modélisations U et V#
Il s’agit de tests de non régression informatique pour vérifier la prise en compte de chargement de PSI avec une fonction ou un complexe.
Le modèle utilisé est identique à la modélisation D.