v6.08.101 SSND101 – Loi de comportement pour des amortisseurs visqueux sur des éléments discrets#
Résumé:
On teste la réponse du modèle de comportement d’amortisseur visqueux non linéaire DIS_VISC, de type “Zener généralisé”, cf. [R5.03.17], formulé sur des éléments discrets pour des mailles SEG2 ou POI1.
Bien qu’il s’agisse d’une loi visqueuse, c’est l’opérateur STAT_NON_LINE qui est employé pour la validation. On analyse la réponse d’éléments discrets supportant une loi de comportement non linéaire visqueuse sous un chargement harmonique. Les modélisations sont les suivantes:
statique en cyclique non linéaire,
statique en cyclique linéaire et calcul de la dissipation,
statique non linéaire en fluage,
statique non-linéaire, en modélisant un amortisseur de type MAXWELL.
Les modélisations et éléments discrets testés sont en \(\mathrm{3D}\) avec les modélisations DIS_Tet DIS_TR et les caractéristiques élémentaires: (K_T_D_L, K_TR_D_L, K_T_D_N, K_TR_D_N, A_T_D_L, M_T_D_L), selon le type de maille et d’élément.
Ce comportement est aussi validé pour des sollicitations dynamiques dans le cas-test SDND107 [V5.01.107] avec les opérateurs DYNA_VIBRA, DYNA_TRAN_MODAL et DYNA_NON_LINE.
Solutions de référence#
Méthode de calcul utilisée pour les solutions de référence#
Modélisation A#
Les équations régissant le comportement sont des équations différentielles non linéaires. Pour valider la réponse obtenue avec Code_Aster en statique non linéaire une intégration par une méthode de Runge-Kutta est réalisée avec un outil externe à Code_Aster .
La comparaison est réalisée sur le déplacement et sur l’effort, pour les 4 types de d’éléments discrets.
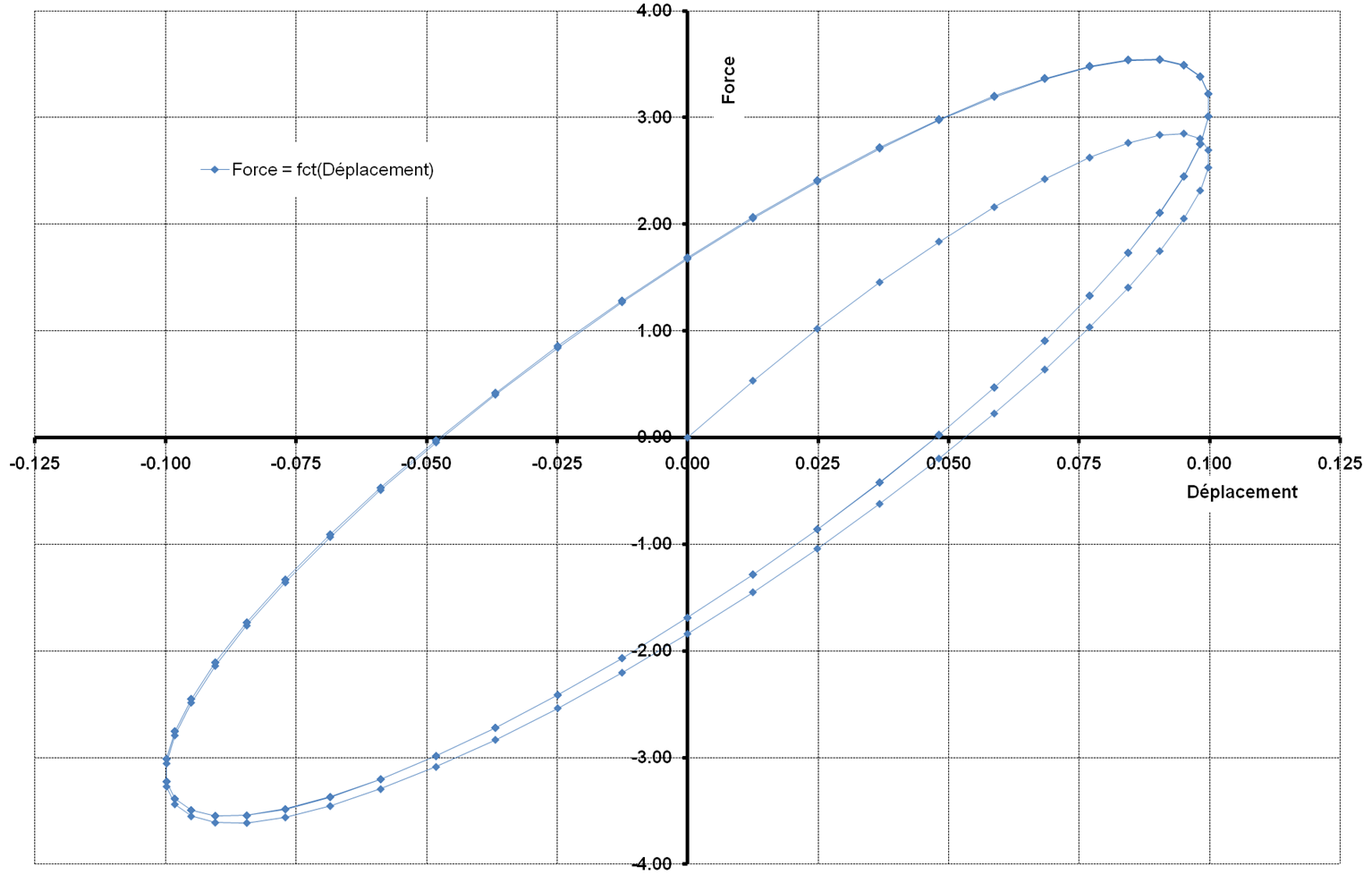
Figure 2.1.1-a : Courbe Force déplacement, modélisation A.
La réponse donnée par Code_Aster est testée pour les valeurs suivantes:
Instant |
Déplacement \({U}_{x}\) |
Force \({F}_{x}\) |
2.00E-02 |
5.877852523E-02 |
2.187710580E+00 |
4.00E-02 |
9.510565163E-02 |
2.829192223E+00 |
6.00E-02 |
9.510565163E-02 |
2.035749590E+00 |
8.00E-02 |
5.877852523E-02 |
2.402408962E-01 |
1.00E-01 |
-1.653950414E-16 |
-1.851221553E+00 |
1.32E-01 |
-8.443279255E-02 |
-3.445042947E+00 |
2.00E-01 |
4.196133458E-16 |
1.745702939E+00 |
2.32E-01 |
8.443279255E-02 |
3.409095131E+00 |
2.68E-01 |
8.443279255E-02 |
1.626471785E+00 |
3.16E-01 |
-4.817536741E-02 |
-2.962435650E+00 |
3.56E-01 |
-9.822872507E-02 |
-2.590008311E+00 |
4.12E-01 |
3.681245527E-02 |
2.724835444E+00 |
4.36E-01 |
9.048270525E-02 |
3.394150679E+00 |
5.20E-01 |
-5.877852523E-02 |
-3.151025904E+00 |
6.24E-01 |
6.845471059E-02 |
3.289283317E+00 |
7.16E-01 |
-4.817536741E-02 |
-2.962278876E+00 |
8.00E-01 |
1.678385621E-15 |
1.750844985E+00 |
8.16E-01 |
4.817536741E-02 |
2.962278875E+00 |
8.48E-01 |
9.980267284E-02 |
3.047135026E+00 |
9.40E-01 |
-9.510565163E-02 |
-3.326860603E+00 |
9.68E-01 |
-8.443279255E-02 |
-1.627037269E+00 |
1.00E+00 |
-1.224606354E-16 |
1.750844985E+00 |
Tableau 2.1.1-a : Déplacement et Efforts, modélisation A.
Modélisation B#
Cette modélisation statique non linéaire permet de tester, en plus de la loi de comportement, la dissipation lors d’un chargement cyclique stabilisé. La dissipation est comparée à une valeur théorique obtenue dans le cas particulier \({\alpha}_{3}=1.0\) .
Remarque: Pour un chargement cyclique avec \({\alpha}_{3}\ne 1\) le calcul théorique de la dissipation n’est pas accessible, sauf pour un cycle stabilisé.
La réponse donnée par Code_Aster est testée pour les valeurs suivantes:
Instant |
Déplacement \({U}_{x}\) |
Force \({F}_{x}\) |
2.00E-02 |
5.877852523E-02 |
2.160195640E+00 |
4.00E-02 |
9.510565163E-02 |
2.849834733E+00 |
6.00E-02 |
9.510565163E-02 |
2.052734480E+00 |
8.00E-02 |
5.877852523E-02 |
2.258915314E-01 |
1.00E-01 |
-1.653950414E-16 |
-1.838798378E+00 |
1.32E-01 |
-8.443279255E-02 |
-3.611426479E+00 |
2.00E-01 |
4.195726882E-16 |
1.674446965E+00 |
2.32E-01 |
8.443279255E-02 |
3.535539017E+00 |
2.68E-01 |
8.443279255E-02 |
1.730277335E+00 |
3.16E-01 |
-4.817536741E-02 |
-2.984761046E+00 |
3.56E-01 |
-9.822872507E-02 |
-2.752278435E+00 |
4.12E-01 |
3.681245527E-02 |
2.719185079E+00 |
4.36E-01 |
9.048270525E-02 |
3.544941424E+00 |
5.20E-01 |
-5.877852523E-02 |
-3.201565830E+00 |
6.24E-01 |
6.845471059E-02 |
3.368686714E+00 |
7.16E-01 |
-4.817536741E-02 |
-2.983942123E+00 |
8.00E-01 |
1.678385621E-15 |
1.687931415E+00 |
8.16E-01 |
4.817536741E-02 |
2.983942066E+00 |
8.48E-01 |
9.980267284E-02 |
3.223403140E+00 |
9.40E-01 |
-9.510565163E-02 |
-3.492301297E+00 |
9.68E-01 |
-8.443279255E-02 |
-1.732887550E+00 |
1.00E+00 |
-1.224606354E-16 |
1.687931421E+00 |
Tableau 2.1.2-a : Déplacement et Efforts, modélisation B.
Le calcul de la dissipation sur un cycle stabilisé est obtenu en intégrant les équations du système dans le cas particulier où \({\alpha}_{3}=1\) .
Sur un cycle stabilisé, pour \({\alpha}_{3}=1\) , la valeur de la dissipation est:
\(\Delta D=\frac{\pi .{U}_{0}^{2}.{E}_{1}^{2}.{E}_{3}^{2}.\omega .{C}_{3}}{{\omega}^{2}.{C}_{3}^{2}.{({E}_{1}+{E}_{2}+{E}_{3})}^{2}+{({E}_{1}+{E}_{2})}^{2}.{E}_{3}^{2}}\) [éq2.1.2-1]
Modélisation C#
Cette modélisation statique non linéaire permet de tester la loi de comportement lors d’un essai de type fluage. Le déplacement est imposé et reste constant: \({U}_{0}=0.1\) . La réponse de la loi de comportement ainsi que la dissipation sont comparées aux valeurs théoriques obtenues dans le cas particulier \({\alpha}_{3}=0.5\) .
Les équations différentielles intégrées dans le cas particulier de \(U\) constant et de \({\alpha}_{3}=0.5\) donnent les équations de l’effort et de la dissipation en fonction du temps:
\(F(t)=\frac{{U}_{0}.{E}_{1}.({\mathrm{AA}}_{s}+{\mathrm{BB}}_{s}.{E}_{2}.t)}{{({E}_{3}+{E}_{2}+{E}_{1})}^{2}.{C}_{3}^{2}+{\mathrm{BB}}_{s}.({E}_{2}+{E}_{1}).t}\) [éq2.1.3-1]
\(D(t)=\frac{{U}_{0}^{3}.{E}_{1}^{3}.{E}_{3}^{3}}{2.({E}_{3}+{E}_{2}+{E}_{1})}.\mathit{t.}\frac{(2.{\mathit{AA}}_{e}+{\mathit{BB}}_{e}.t)}{{({\mathit{AA}}_{e}+{\mathit{BB}}_{e}.t)}^{2}}\) [éq2.1.3-2]
avec \(\lbrace \begin{array}{}{\mathrm{AA}}_{s}=({E}_{3}+{E}_{2}).({E}_{1}+{E}_{2}+{E}_{3}).{C}_{3}^{2}\\ {\mathrm{BB}}_{s}={U}_{0}.{E}_{1}.{E}_{3}^{2}\end{array}\lbrace \begin{array}{}{\mathrm{AA}}_{e}={({E}_{3}+{E}_{2}+{E}_{1})}^{2}.{C}_{3}^{2}\\ {\mathrm{BB}}_{e}={U}_{0}.{E}_{1}.{E}_{3}^{2}.({E}_{2}+{E}_{1})\end{array}\)
Modélisation D#
Les équations régissant le comportement sont des équations différentielles non linéaires. Pour valider la réponse obtenue avec Code_Aster en statique non linéaire une intégration par une méthode de Runge-Kutta est réalisée avec un outil externe à Code_Aster .
La comparaison est réalisée sur le déplacement et sur l’effort.
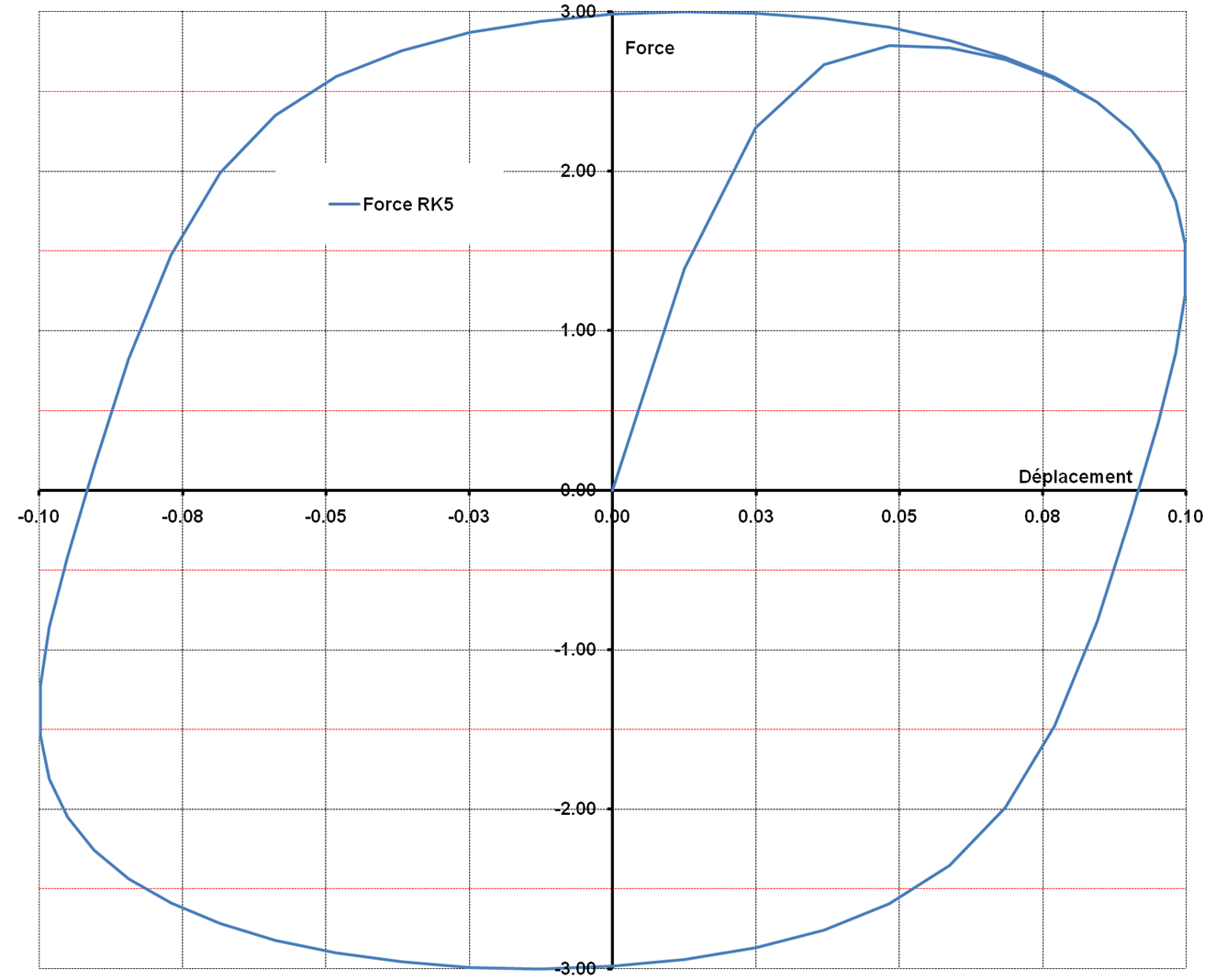
Figure 2.1.4-a : Courbe Force déplacement, modélisation D.
La réponse donnée par Code_Aster est testée pour les valeurs suivantes:
Instant |
Déplacement \({U}_{x}\) |
Force \({F}_{x}\) |
4.000E-03 |
1.2533323356430E-02 |
1.3901305564654E+00 |
4.800E-02 |
9.9802672842827E-02 |
1.5399690347096E+00 |
1.000E-01 |
-1.6539504141266E-16 |
-2.9840799981192E+00 |
1.360E-01 |
-9.0482705246602E-02 |
-2.2555706075403E+00 |
2.040E-01 |
1.2533323356431E-02 |
2.9999350282465E+00 |
2.480E-01 |
9.9802672842827E-02 |
1.5401915597398E+00 |
3.040E-01 |
-1.2533323356431E-02 |
-2.9999350282852E+00 |
3.480E-01 |
-9.9802672842827E-02 |
-1.5401915597074E+00 |
4.040E-01 |
1.2533323356431E-02 |
2.9999350282970E+00 |
5.000E-01 |
-1.0045133128078E-15 |
-2.9840798812719E+00 |
5.600E-01 |
-9.5105651629515E-02 |
-4.1551773591104E-01 |
6.000E-01 |
1.3475548801822E-15 |
2.9840798812750E+00 |
6.400E-01 |
9.5105651629516E-02 |
2.0490126532863E+00 |
7.040E-01 |
-1.2533323356432E-02 |
-2.9999350283063E+00 |
7.480E-01 |
-9.9802672842827E-02 |
-1.5401915596821E+00 |
8.040E-01 |
1.2533323356432E-02 |
2.9999350283073E+00 |
8.480E-01 |
9.9802672842827E-02 |
1.5401915596806E+00 |
9.040E-01 |
-1.2533323356432E-02 |
-2.9999350283079E+00 |
9.480E-01 |
-9.9802672842827E-02 |
-1.5401915596795E+00 |
1.000E+00 |
-1.2240642527361E-16 |
2.9840798812793E+00 |
Tableau 2.1.4-a : Déplacement et Efforts, modélisation D.
Incertitude sur la solution#
Modélisation A#
Pour la réponse en effort, déplacement:
La solution de référence est obtenue par intégration numérique d’un système différentiel non linéaire.
Modélisation B#
Pour la réponse en effort, déplacement:
La solution de référence est obtenue par intégration numérique d’un système différentiel, avec une méthode de type Runge-Kutta d’ordre 5.
Pour la dissipation:
Aucune incertitude, la solution est analytique.
Modélisation C#
Pour la réponse en effort, déplacement:
Aucune incertitude, la solution est analytique.
Pour la dissipation :
Aucune incertitude, la solution est analytique.
Modélisation D#
Pour la réponse en effort, déplacement:
La solution de référence est obtenue par intégration numérique d’un système différentiel.
Modélisation A#
Caractéristiques de la modélisation#
Les modélisations testées sont DIS_T et DIS_TR sur des mailles et des points. Les caractéristiques de raideur des discrets sont donc du type: K_T_D_L, K_TR_D_L, K_T_D_N, K_TR_D_N.
Caractéristiques du maillage#
Nombre de nœuds: 6, nombre de mailles: 4, éléments SEG2: 2, éléments POI1: 2.
Conditions aux limites et chargements#
La condition en déplacement est une fonction du temps:
\({U}_{0}.\sin(2\pi .\mathrm{f.t})\) avec \(f=5\mathrm{Hz};{U}_{0}=0.1m\)
Discrétisation en temps#
Le pas de temps et l’intervalle de temps d’analyse sont:
\(\Delta t=4,0{10}^{-3}s\) et \(t\in [0s,1s]\)
Grandeurs testées et résultats#
Les grandeurs testées sont le déplacement, et les efforts. Les valeurs sont celles présentées au tableau.
Les tolérances sont celles par défaut.
Modélisation B#
Caractéristiques de la modélisation#
Les modélisations testées sont DIS_T et DIS_TR sur des mailles et des points. Les caractéristiques de raideur des discrets sont donc du type : K_T_D_L, K_TR_D_L, K_T_D_N, K_TR_D_N.
Caractéristiques du maillage#
Nombre de nœuds: 6, nombre de mailles: 4, éléments SEG2: 2, éléments POI1: 2.
Conditions aux limites et chargements#
La condition en déplacement est une fonction du temps:
\({U}_{0}.\sin(2\pi .\mathit{f.t})\) avec \(f=5\mathrm{Hz};{U}_{0}=0.1m\)
Discrétisation en temps#
Le pas de temps et l’intervalle de temps d’analyse sont:
\(\Delta t=4,0{10}^{-3}s\) et \(t\in [0s,1s]\)
Grandeurs testées et résultats#
Les grandeurs testées sont :
le déplacement, et les efforts. Les valeurs sont celles présentées au tableau.
la dissipation sur un cycle stabilisé, est donnée par l’équation.
Après application numérique, la dissipation sur un cycle stabilisé est:
\({D}_{\mathrm{cycle}}=0.53097854397953936J\)
Le cycle considéré pour le calcul de la dissipation est le dernier de la simulation, entre les instants \((1.0-1.0/f)\mathit{sec}\) et \(1.0\mathit{sec}\) . En réalité ce cycle n’est pas tout à fait stabilisé, mais pour des raisons de temps CPU, on le considérera stabilisé. Cela entraîne un léger écart entre la valeur théorique et la valeur calculée.
Valeur Référence |
Précision |
Valeur Calculée |
|
Dissipation |
0.53097854397953936 |
3.00E-003 |
0.5295830097 |
Modélisation C#
Caractéristiques de la modélisation#
La modélisation testée est DIS_T sur une maille SEG2. La caractéristique de raideur du discret est du type K_T_D_L.
Caractéristiques du maillage#
Nombre de nœuds: 2, nombre de mailles: 1, Éléments SEG2: 1.
Conditions aux limites et chargements#
La condition en déplacement est imposé à \({U}_{0}=0.1m\) .
Discrétisation en temps#
Le pas de temps et l’intervalle de temps d’analyse sont:
\(\Delta t=4,0{10}^{-3}s\) et \(t\in [0s,1s]\)
Grandeurs testées et résultats#
Les grandeurs testées sont l’effort et la dissipation pour un chargement d’une durée de \(1\mathit{sec}\) . Les équations et sont évaluées dans le cas tests. Les tolérances sont celles par défaut.
Instant |
Force |
Dissipation |
0.080 |
1.582279190E+00 |
1.686873697E-01 |
0.120 |
1.392001789E+00 |
1.717556743E-01 |
0.200 |
1.220373612E+00 |
1.736354073E-01 |
0.280 |
1.140716683E+00 |
1.742217215E-01 |
0.400 |
1.078322512E+00 |
1.745542834E-01 |
0.600 |
1.028128094E+00 |
1.747410406E-01 |
0.680 |
1.016097791E+00 |
1.747751013E-01 |
1.000 |
9.868740067E-01 |
1.748406080E-01 |
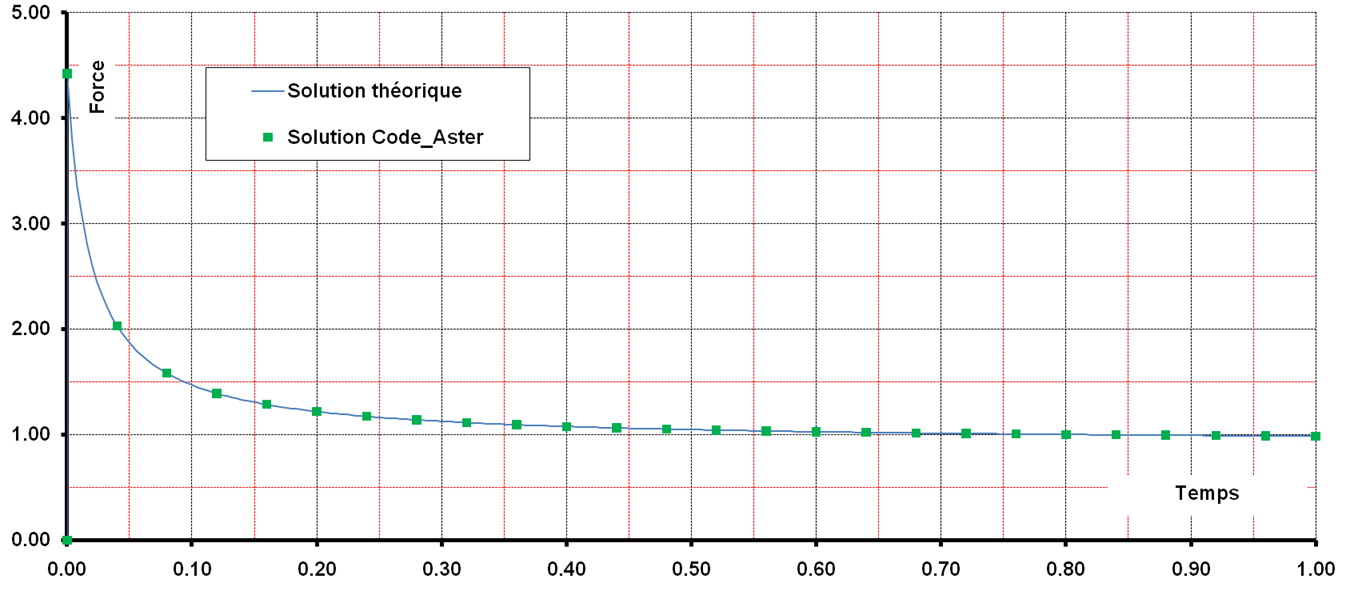
Figure 5.5-a : Courbes de fluage théorique et calculée par Code_Aster.
Modélisation D#
Caractéristiques de la modélisation#
La modélisation testée est DIS_T sur une mailleSEG2. La caractéristique de raideur du discret est du type K_T_D_L.
Caractéristiques du maillage#
Nombre de nœuds: 2, nombre de mailles: 1, éléments SEG2: 1.
Conditions aux limites et chargements#
La condition en déplacement est une fonction du temps:
\({U}_{0}.\sin(2\pi .\mathit{f.t})\) avec \(f=5\mathit{Hz};{U}_{0}=0.1m\)
Le pas de temps et l’intervalle de temps d’analyse sont:
\(\Delta t=4,0{10}^{-3}s\) et \(t\in [:ref:`0s,5s <0s,5s>\)]`
Grandeurs testées et résultats#
Les grandeurs testées sont le déplacement, et les efforts. Les valeurs sont celles présentées au tableau.
Les tolérances sont celles par défaut.
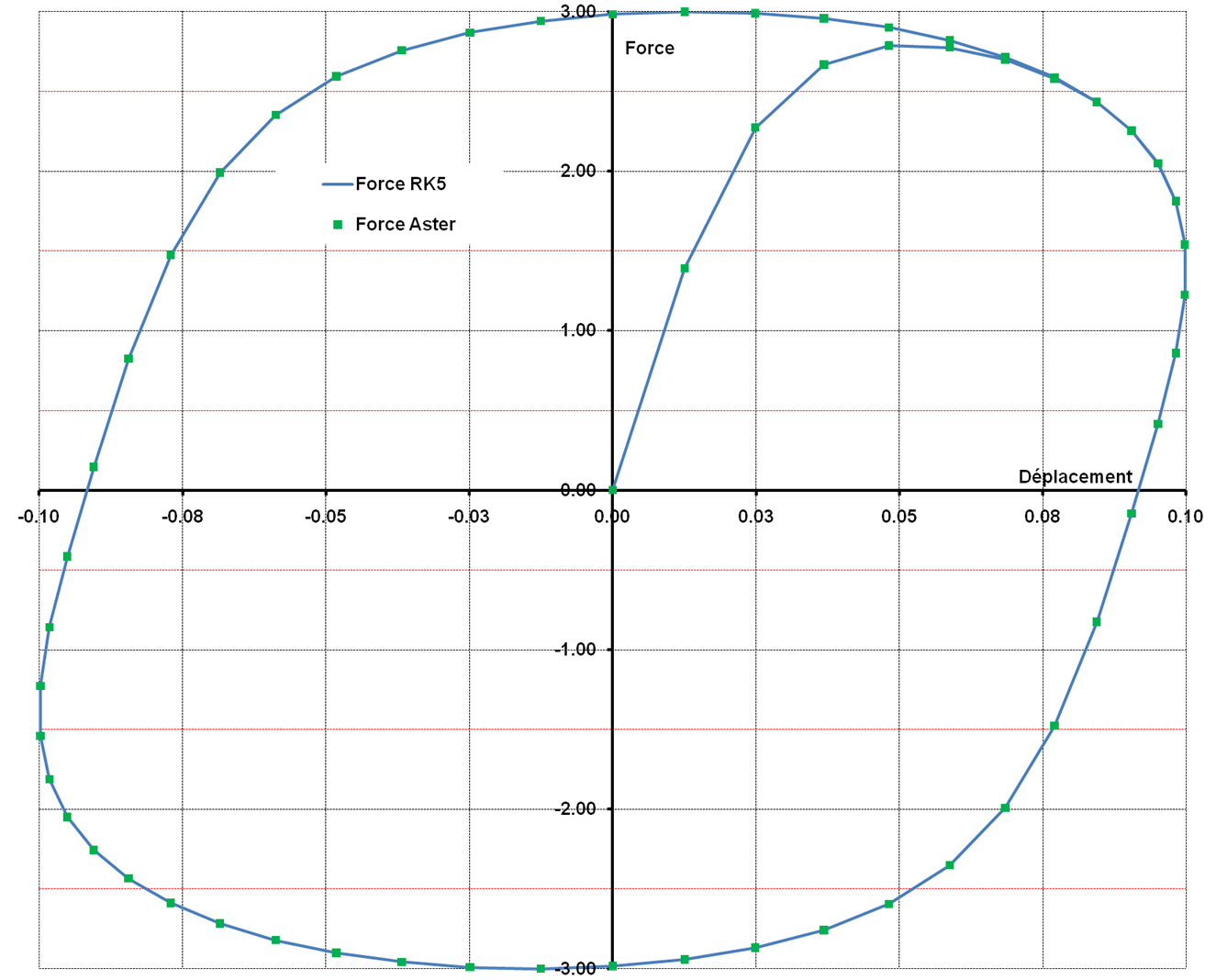
Figure 6.4-a : Réponse Force-Déplacement, calculée par une méthode RK5 et par Code_Aster.
Synthèse des résultats#
Ces tests permettent de vérifier le bon fonctionnement des éléments discrets \(\mathrm{2D}\) et \(\mathrm{3D}\) avec le comportement DIS_VISC dans le cadre d’une utilisation avec la commande STAT_NON_LINE.