r7.01.15 Loi de comportement de LAIGLE#
Résumé:
Le modèle rhéologique de Laigle permet d’analyser le comportement mécanique des roches. Le développement de ce modèle de comportement a été initié suite à la difficulté d’appréhender correctement la réponse du massif lors de l’excavation d’une cavité souterraine, dans le but:
de définir le besoin et la nature des soutènements éventuels à mettre en œuvre;
de déterminer l’étendue du terrain autour d’un ouvrage influencée par le creusement.
La mise en œuvre de ce modèle élastoplastique a été principalement focalisée sur la simulation du comportement post-pic de la roche. On suppose, dans cette optique, qu’il n’y a pas d’écrouissage de la roche préalablement à la rupture de celle-ci. Cela se traduit par un comportement élastique linéaire jusqu’au pic de résistance (il peut néanmoins y avoir endommagement de la roche alors que le matériau n’est pas encore en rupture). Le critère de plasticité défini est de type Hoek et Brown généralisé et rend compte de l’influence du niveau de contrainte sur la résistance au cisaillement. Le radoucissement du matériau est associé à une diminution progressive des propriétés de cohésion et d’angle de frottement accompagnée d’un changement de volume. Il est piloté par la déformation déviatoire plastique cumulée considérée comme seule variable d’écrouissage.
Pour faciliter l’intégration de ce modèle dans Code_Aster , la loi initialement développée dans le formalisme des contraintes principales a été réécrite avec des invariants de contraintes sur une base du modèle Cambou‑Jafari-Sidoroff (CJS). La formulation numérique est implicite par rapport au critère et explicite par rapport à la direction d’écoulement.
La convention de signe utilisée pour la formulation des équations, dans le cadre de cette note, est celle de la mécanique des milieux continus.
Introduction#
L’objet de cette note est de présenter le modèle rhéologique pour analyser le comportement mécanique des roches, adapté à la simulation des ouvrages souterrains, introduit dans Code_Aster et développé par le CIH [bib1]. La finalité de ce modèle est de pouvoir être mis en œuvre, de manière rapide et industrielle afin de répondre aux principales interrogations que se pose l’ingénieur lors de l’analyse et de la conception d’une cavité souterraine. La loi rhéologique doit pour cela rester relativement simple, aussi bien lors de l’identification des paramètres que dans sa mise en œuvre et lors de l’interprétation des résultats.
Phénoménologie du comportement des sols#
Une des particularités d’une roche, par rapport à un sol, est que son comportement mécanique est, sur une plage de contrainte importante, piloté par la cohésion. Cette cohésion est associée à une cimentation du milieu, induite au cours de l’histoire géologique du massif, et est essentiellement de nature épitaxique. Au contraire, la résistance d’un sol est plus particulièrement régie par le terme de frottement et/ou de dilatance. La cohésion, d’origine essentiellement capillaire, n’a alors une influence que pour de très faibles états de contraintes de confinement.
Cette distinction entre un sol et une roche est importante car elle oriente le choix et les hypothèses de base du modèle de comportement.
Les principaux phénomènes rhéologiques associés à ce contexte sont les suivants:
Dans le domaine des petites déformations, la réponse d’une roche, en particulier sous de faibles états de confinement, peut être assimilée à un comportement élastique linéaire, faiblement dépendant de l’état des contraintes. Les non-linéarités du comportement sont susceptibles d’apparaître préalablement au pic de résistance, dans le cas des roches tendres, pour un niveau de contrainte de l’ordre de 70 à 80% de la valeur maximale. Ce seuil diminue avec l’accroissement de la pression moyenne pour quasiment s’annuler lorsque la contrainte de surconsolidation est atteinte (cap-model). Sous de très faibles contraintes de confinement représentatives de celles régnant à proximité des ouvrages souterrains, ces non-linéarités sont généralement faibles, d’autant plus que la cimentation est importante, et donc le niveau de surconsolidation de la roche élevé.
La dilatance (augmentation de volume) s’initie lorsque les non-linéarités apparaissent sur la courbe contrainte-déformation. Cette dilatance s’accroît jusqu’à ce qu’il y ait localisation au sein de l’échantillon. A ce moment, le taux de dilatance (ou l’angle de dilatance \(\psi\) ) est maximal, pour ensuite progressivement décroître et s’annuler aux très grandes déformations.
Le pic de résistance est atteint pour des contraintes décrivant un critère de rupture, généralement courbe dans le plan de Mohr ou dans le plan des contraintes principales majeures et mineures. L’hypothèse d’un critère linéaire de Mohr-Coulomb n’est donc qu’une hypothèse simplificatrice, ayant tendance, pour de faibles contraintes de confinement, à majorer la cohésion du milieu.
Une fois la résistance maximale atteinte, la résistance de la roche diminue. Ce radoucissement post-pic est d’autant plus rapide et important (en intensité) que la contrainte de confinement est faible. Cette décroissance est liée à un endommagement plus ou moins localisé de la roche, en fonction du niveau de confinement. Quelle que soit cette contrainte, au-delà du pic, la roche ne peut plus être considérée comme continue . Son comportement est alors piloté par les conditions de déformation et de résistance au niveau de la zone de localisation des déformations.
L’apparition d’une ou plusieurs discontinuités cinématiques au sein de la roche est associée à une perte de la cohésion. Le comportement post-pic est alors régi par les conditions de frottement et de dilatance le long des plans de discontinuité ou au sein d’une bande de localisation des déformations. Il ressort de ce raisonnement que pour de très grandes déformations, le comportement de la roche assimilée à une «structure», est uniquement frottant, et est caractérisé par un angle de frottement ultime \(\phi\) . Cet angle est une donnée intrinsèque du matériau, fonction des minéraux constitutifs de la roche. Il ne dépend donc pas directement des conditions de cohésion, et il peut surtout être considéré comme indépendant des dimensions de l’échantillon.
Lorsque le comportement devient uniquement frottant, il n’est associé à aucune déformation volumique. La dilatance s’est donc annulée, et n’existe plus aux grandes déformations.
L’évolution entre la résistance de pic et l’état critique correspondant aux grandes déformations, est plus ou moins progressive en fonction de l’état des contraintes appliquées. Pour un état de confinement nul (compression simple), le comportement est uniquement piloté par la cohésion, et la rupture se traduit par une perte immédiate et brutale de toute résistance. Le radoucissement sera plus progressif au fur et à mesure que la contrainte de confinement augmentera, pour devenir inexistant au-delà d’une certaine contrainte de confinement limitant les domaines de comportement ductiles et fragiles.
Contexte d’étude et hypothèses simplificatrices du modèle#
La volonté de développer un modèle aisé à mettre en œuvre s’accompagne nécessairement de simplifications, issues d’un compromis entre les objectifs attendus, les conditions d’utilisation du modèle (qualité des données d’entrée, délais et coût disponible…) et les moyens mis en œuvre pour assurer ces développements. Ces compromis sont essentiellement les suivants:
Un comportement élastique linéaire jusqu’au pic de résistance. Ceci revient à supposer qu’il n’y a pas d’écrouissage de la roche préalablement à la rupture de celle-ci.
Seul un critère de rupture en cisaillement est retenu . Ceci signifie que si la roche est écrasée de manière isotrope, le comportement reste élastique, et qu’il n’y a pas endommagement et écrouissage du matériau sous ce type de chemin. Durant les phases d’excavation d’un ouvrage souterrain avec mise en œuvre d’un soutènement léger, la pression moyenne dans le massif situé à proximité ne peut que diminuer (ou rester constante dans le cas idéal d’une cavité circulaire soumise à une sollicitation isotrope, pour un comportement élastique linéaire). La plastification sous contrainte isotrope, que l’on peut retrouver sur un Cap-Model ou sur une loi de type Cam-Clay ne nous a pas semblé indispensable compte tenu des objectifs recherchés, et dans le cas d’une sollicitation isotherme et à court terme.
Lors du développement de ce modèle, nous nous sommes volontairement focalisés sur l’étude et la simulation du comportement post-pic de la roche. Dans ce domaine de comportement, la résistance du matériau est supposée pilotée, en fonction de l’état des contraintes et du niveau d’endommagement de la roche, par la cohésion, la dilatance ou le frottement.
La cohésion définit la résistance du matériau tant que celui-ci reste continue. Elle est active jusqu’au pic de résistance, et n’a que peu d’influence sur le comportement radoucissant, à moins que la cohésion soit représentative d’une «colle» ductile (cas des sols injectés par gel de silicates,…).
Au fur et à mesure que la cohésion se détériore par endommagement, la dilatance augmente, pour atteindre sa valeur maximale lors de la perte de continuité du milieu. A ce moment, sous l’effet du cisaillement de la discontinuité induite, cette dilatance se dégrade progressivement et lentement. La rhéologie de la roche évolue alors vers un comportement purement frottant.
Le modèle continu#
Comportement élastique#
Le comportement élastique est piloté par une loi linéaire, avec un module constant indépendant de l’état de contraintes. Les 2 paramètres caractérisant ce comportement sont le module d’élasticité E et le coefficient de Poisson \(\nu\) .
\(\dot{s}=2\mu (\dot{e}-\dot{{e}^{p}})\) éq 3.1-1
\(\dot{{I}_{1}}=\mathrm{3K}(\dot{{\varepsilon}_{\nu }}-\dot{{\varepsilon}_{\nu }^{p}})\) éq 3.1-2
Critère de plasticité#
La formulation adoptée est celle de [bib2].
Surface de charge#
Expression du critère de Laigle en contraintes majeures et mineures#
\(f={(\frac{\sqrt{\frac{2}{3}}}{{\sigma}_{c}})}^{\frac{1}{a({\gamma}^{p})}}\left[(\mid {\sigma}_{1}-{\sigma}_{3}\mid )\frac{1}{a({\gamma}^{p})}-({\sigma}_{c})\frac{1}{a({\gamma}^{p})}(\frac{m({\gamma}^{p})}{{\sigma}_{c}}(-{\sigma}_{3})+s({\gamma}^{p}))\right]\) éq 3.2.1.1-1
Expression générale#
On transforme l’expression précédente en fonction du premier invariant et du déviateur des contraintes, par un recalage du critère sur un triaxial en compression, pour obtenir:
\(f={(\frac{g(s)}{{\sigma}_{c}{h}_{c}^{0}})}^{\frac{1}{a({\gamma}^{p})}}-u(\sigma ,{\gamma}^{p})\le 0\) éq 3.2.1.2-1
avec:
\(h(\theta )={(1+{\gamma}_{\text{cjs}}\cos(3\theta ))}^{1/6}={(1+{\gamma}_{\text{cjs}}\sqrt{54}\frac{\det(s)}{{s}_{\mathrm{II}}^{3}})}^{1/6}\) éq 3.2.1.2-2
\({h}_{c}^{0}=h(\theta =\frac{\pi}{3})={(1-{\gamma}_{\text{cjs}})}^{1/6}\)
\({h}_{t}^{0}={(1+{\gamma}_{\text{cjs}})}^{1/6}\)
\(g(s)={s}_{\mathrm{II}}h(\theta )\) éq 3.2.1.2-3
\(u(\sigma ,{\gamma}^{p})=-\frac{m({\gamma}^{p})k({\gamma}^{p})}{\sqrt{6}{\sigma}_{c}}\frac{g(s)}{{h}_{c}^{0}}-\frac{m({\gamma}^{p})k({\gamma}^{p})}{3{\sigma}_{c}}{I}_{1}+s({\gamma}^{p}).k({\gamma}^{p})\) éq 3.2.1.2-4
Remarque:
On démontre [Annexe 1] l’équivalence des deux expressions
On montre qu’une deuxième formulation du critère avec un recalage sur un triaxial en compression et en extension est possible mais nous ne la choisissons pas. Elle est toutefois présentée au chapitre [§9].
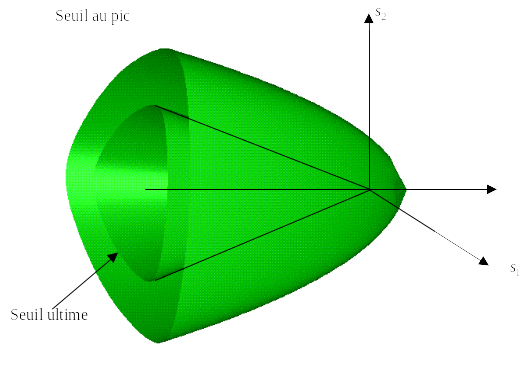
Allure des seuils#
On trace l’allure des seuils au critère de pic et au critère ultime.
Écrouissage#
Pour traduire le radoucissement post-pic de la roche on définit des lois de variations des paramètres m, s et a du critère en fonction de la variable interne d’écrouissage \({\gamma}^{p}\) (il s’agit de la déformation déviatoire plastique cumulée, proportionnelle au deuxième invariant du tenseur des déformations déviatoires, correspondant à la distorsion plastique).
\(\begin{array}{cc}s({\gamma}^{p})=(1-\frac{{\gamma}^{p}}{{\gamma}^{e}})& \text{si}{\gamma}^{p}<{\gamma}_{e}\\ s({\gamma}^{p})=0& \text{si}{\gamma}^{p}\ge {\gamma}_{e}\end{array}\) éq 3.2.2-1
Sinon
\(\Omega ({\gamma}^{p})={(\frac{{\gamma}^{p}}{{\gamma}^{e}})}^{\eta}\frac{{a}_{e}-{a}_{\text{pic}}}{1-{a}_{e}}\frac{{\gamma}_{\text{ult}}-{\gamma}_{e}}{{\gamma}_{\text{ult}}-{\gamma}^{p}}\) éq 3.2.2-2
\(a({\gamma}^{p})=\frac{{a}_{\text{pic}}+\Omega ({\gamma}^{p})}{1+\Omega ({\gamma}^{p})}\) éq 3.2.2-3
\(\begin{array}{cc}m({\gamma}^{p})=\frac{{\sigma}_{c}}{{\sigma}_{\text{p1}}}\left[{({m}^{\text{pic}}\frac{{\sigma}_{\text{p1}}}{{\sigma}_{c}}+1)}^{\frac{{a}_{\text{pic}}}{a({\gamma}^{p})}}-s({\gamma}^{p})\right]& \text{si}{\gamma}^{p}<{\gamma}_{e}\\ m({\gamma}^{p})=\frac{{\sigma}_{c}}{{\sigma}_{\text{p2}}}\left[{({m}_{e}\frac{{\sigma}_{\text{p2}}}{{\sigma}_{c}})}^{\frac{{a}_{\text{pic}}}{a({\gamma}^{p})}}\right]& \text{si}{\gamma}^{p}\ge {\gamma}_{e}\end{array}\) éq 3.2.2-4
\(k({\gamma}^{p})={(\frac{2}{3})}^{\frac{1}{\mathrm{2a}({\gamma}^{p})}}\) . éq 3.2.2-5
Ces lois d’évolutions pour chacun des 3 paramètres sont dépendantes les unes des autres et respectent les conditions d’intersection des critères durant la phase d’écrouissage [bib1].
Remarque:
La condition de cohérence à respecter porte sur la continuité du paramètre
|

Loi de dilatance#
Écriture généralisée#
La loi de dilatance (on admet que la valeur de la dilatance est inversement proportionnelle à celle de la cohésion) peut être généralisée en écrivant:
\(\sin\psi =\sin(\psi ({\alpha}^{'}))=\gamma \frac{{\alpha}^{'}-{m}_{\text{ult}}-1}{\zeta {\alpha}^{'}+{m}_{\text{ult}}+1}\) éq 3.2.3.1-1
avec:
\({\alpha}^{'}={\alpha}^{'}({I}_{1,}g(s),{\sigma}_{\text{t0}})=\frac{\tilde{{\sigma}_{1}}-{\sigma}_{\text{t0}}}{\tilde{{\sigma}_{3}}-{\sigma}_{\text{t0}}}\) éq 3.2.3.1-2
\({s}_{3}=\sqrt{\frac{2}{3}}{s}_{\text{II}}\cos(\theta );\text{}{s}_{1}=\sqrt{\frac{2}{3}}{s}_{\text{II}}\cos(\theta +\frac{2\pi }{3});\text{}{s}_{2}=\sqrt{\frac{2}{3}}{s}_{\text{II}}\cos(\theta -\frac{2\pi }{3});\) où \(\theta\) est l’angle de Lode
\({\sigma}_{1}=\frac{{I}_{1}}{3}+{s}_{1};\text{}{\sigma}_{2}=\frac{{I}_{1}}{3}+{s}_{2};\text{}{\sigma}_{3}=\frac{{I}_{1}}{3}+{s}_{3};\text{}\)
\(\lbrace \begin{array}{}\tilde{{\sigma}_{1}}={\sigma}_{i}\text{avec}i\text{tel que}\mid {\sigma}_{i}\mid =\max(\mid {\sigma}_{j}\mid ,j=1,2,3)\\ \tilde{{\sigma}_{3}}={\sigma}_{i}\text{avec}i\text{tel que}\mid {\sigma}_{i}\mid =\max(\mid {\sigma}_{j}\mid ,j=1,2,3)\end{array}\)
Remarque:
Une condition à respecter est que le rapport \(\frac{\gamma}{\zeta}\) reste inférieur à 1. Dans le cas de roches dures très résistantes, soumises à des contraintes de confinement relativement faibles, la loi de dilatance peut ainsi tendre vers ce rapport. Si les deux paramètres sont unitaires on retrouve l’expression de la loi de Rowe décrivant la loi de dilatance pour des sols pulvérulents. Cette approche revient à conserver la même expression que pour une roche fortement endommagée, en assimilant l’effet de la cohésion à celui d’un confinement supplémentaire de valeur \({\sigma}_{\mathrm{t0}}\) .
Caractérisation de \({\sigma}_{\mathrm{t0}}\) en fonction des paramètres (a, m, s) caractérisant la roche
Cas où \(s({\gamma}^{p})=0\)
Disparition de la cohésion, on pose \({\sigma}_{\mathrm{t0}}=0\)
Cas où \(s({\gamma}^{p})\ne 0\)
\({\sigma}_{\mathrm{t0}}={\sigma}_{\mathrm{t0}}({\varphi}_{0,}{C}_{0})={\mathrm{2C}}_{0}\sqrt{\frac{1-\sin{\varphi}_{0}}{1+\sin{\varphi}_{0}}}\) éq 3.2.3.1-3
avec:
\(\lbrace \begin{array}{}{\varphi}_{0}={\varphi}_{0}(m,s,a)=2\cdot \arctan(\sqrt{1+{\text{ams}}^{a-1}})-\frac{\pi}{2}\\ {C}_{0}={C}_{0}(m,s,a)=\frac{{\sigma}_{c}{s}^{a}}{\sqrt{1+{\text{ams}}^{a-1}}}\end{array}\)
Détermination de l’intersection du critère intermédiaire et du critère ultime#
En écrivant la continuité de \(m\) en \({\gamma}_{\text{ult}}\) on obtient la relation suivante:
\(m({\gamma}_{\text{ult}})=\frac{{\sigma}_{c}}{{\sigma}_{\text{p2}}}\left[{({m}_{e}\frac{{\sigma}_{\text{p2}}}{{\sigma}_{c}})}^{\frac{{a}_{e}}{a({\gamma}_{\text{ult}})}}\right]\)
\({m}_{\text{ult}}=\frac{{\sigma}_{c}}{{\sigma}_{\text{p2}}}{({m}_{e}\frac{{\sigma}_{\text{p2}}}{{\sigma}_{c}})}^{\frac{{a}_{e}}{{a}_{\text{ult}}}}\)
\({m}_{\text{ult}}={m}_{e}^{{a}_{e}}{(\frac{{\sigma}_{\text{p2}}}{{\sigma}_{c}})}^{{a}_{e}-1}\)
\({\sigma}_{\text{p2}}={\sigma}_{c}{(\frac{{m}_{\text{ult}}}{{m}_{e}^{{a}_{e}}})}^{\frac{1}{{a}_{e}-1}}\) éq 3.2.3.2-1
Écoulement plastique#
Le formalisme adopté est réécrit sur la base du modèle CJS [R7.01.13]. Quand les contraintes atteignent le bord du domaine de réversibilité, des déformations plastiques se développent. Pour les calculer, il existe une fonction potentielle pilotant l’évolution des déformations et définie par la relation \(\dot{{\varepsilon}^{p}}=\dot{\lambda}G\) où \(\dot{\lambda}\) est le multiplicateur plastique et
\(G=\frac{\partial f}{\partial \sigma }-(\frac{\partial f}{\partial \sigma }n)n\) . éq 3.2.4-1
La fonction potentielle est obtenue à partir de la condition cinématique suivante:
\(\dot{{\varepsilon}_{\nu }^{p}}=-{\beta }^{'}\frac{{\mathrm{s.}\dot{\varepsilon}}^{p}}{{s}_{\mathrm{II}}}\) éq 3.2.4-2
Le paramètre de dilatance \({\beta }^{'}\) se calcule à partir de l’angle de dilatance \(\psi\) (défini par [éq 3.2.3.1-1]) par la formule:
\(\begin{array}{}{\beta }^{'}={\beta }^{'}(\psi )=-\frac{2\sqrt{6}\sin(\psi )}{3-\sin(\psi )}\\ {\beta }^{'}=0\text{si}{\gamma}^{p}>{\gamma}_{\text{ult}}(1-{10}^{\text{-3}})\end{array}\) éq 3.2.4-3
Remarque:
\({\beta }^{'}\) est positif quand \({\gamma}^{p}=0\) et en compression, puis il devient négatif quand la plasticité se développe. Il est toujours négatif en traction
Il est alors possible de chercher à exprimer la condition cinématique [éq 3.2.4-2] à partir d’un tenseur

sous la forme:
\({\mathrm{n.}\dot{\varepsilon}}^{p}=0\) éq 3.2.4-4
Après décomposition de chaque terme en parties déviatoire et hydrostatique, on trouve l’expression:
\(({n}_{I}{s}_{ij}+{n}_{2}{\delta}_{ij}).(\dot{{e}_{ij}^{p}}+\frac{1}{3}\dot{{\varepsilon}_{\nu }^{p}}{\delta}_{ij})={n}_{1}{s}_{ij}\dot{{e}_{ij}^{p}}+{n}_{2}\dot{{\varepsilon}_{\nu }^{p}}=0\)
On en déduit la relation \(\frac{{n}_{1}}{{n}_{2}}=\frac{{\beta }^{'}}{{s}_{\text{II}}}\) qui, ajouté à la condition de normalisation du tenseur

, conduit à l’expression:
\(n=\frac{{\beta }_{'}\frac{s}{{s}_{\text{II}}}+I}{\sqrt{{\beta }^{\text{'2}}+3}}\) éq 3.2.4-5
La loi d’évolution de

doit être telle que la condition cinématique soit satisfaite. Il est donc proposé de prendre la projection de

sur

(normale de l’hypersurface de déformation), soit:
\(\dot{{\varepsilon}^{p}}=\dot{\lambda}G=\dot{\lambda}(\frac{\partial f}{\partial \sigma }-(\frac{\partial f}{\partial \sigma }n)n)\)
On en déduit également la condition portant sur la déformation volumique plastique:
\(\dot{{\varepsilon}_{\nu }^{p}}=\dot{\lambda}G\) éq 3.2.4-6
Calcul des dérivées#
Dérivée du critère#
Dérivée par rapport aux contraintes#
Dérivée intermédiaire par rapport au déviateur#
On part de: \(\frac{\partial g}{\partial {s}_{ij}}=h(\theta )\frac{\partial {s}_{\text{II}}}{\partial {s}_{ij}}+{s}_{\text{II}}\frac{\partial h(\theta )}{\partial {s}_{ij}}\)
où \(\frac{\partial {s}_{\text{II}}}{\partial {s}_{ij}}\) et \(\frac{\partial h(\theta )}{{s}_{ij}}\) sont respectivement donnés par:
\(\frac{{s}_{\text{II}}}{{s}_{ij}}=\frac{{s}_{ij}}{{s}_{\text{II}}}\)
\(\begin{array}{}\frac{\partial h(\theta )}{\partial {s}_{ij}}=\frac{1}{\mathrm{6h}{(\theta )}_{5}}\frac{\partial}{\partial {s}_{ij}}(1+{\gamma}_{\text{cjs}}\sqrt{54}\frac{\det(\underline{\underline{s}})}{{s}_{\text{II}}^{3}})\\ \text{}=\frac{-{\gamma}_{\text{cjs}}\cos(3\theta )}{\mathrm{2h}{(\theta )}^{5}{s}_{\text{II}}^{2}}{s}_{ij}+\frac{{\gamma}_{\text{cjs}}\sqrt{54}}{\mathrm{6h}{(\theta )}^{5}{s}_{\text{II}}^{3}}(\frac{\partial \det(\underline{\underline{s}})}{\partial {s}_{ij}})\end{array}\)
Finalement:
\(\frac{\partial g}{\partial {s}_{ij}}=\frac{1}{h{(\theta )}^{5}}\left[(1+\frac{{\gamma}_{\text{cjs}}}{2}\cos(3\theta ))\frac{{s}_{ij}}{{s}_{\text{II}}}+\frac{{\gamma}_{\text{cjs}}\sqrt{54}}{{\mathrm{6s}}_{\text{II}}^{2}}(\frac{\partial \det(\underline{\underline{s}})}{\partial {s}_{ij}})\right]\)
Et par conséquent:
\(\frac{\partial g}{\partial {s}_{ij}}=\frac{1}{h{(\theta )}^{5}}\left[(1+\frac{{\gamma}_{\text{cjs}}}{2}\cos(3\theta ))\frac{s}{{s}_{\text{II}}}+\frac{{\gamma}_{\text{cjs}}\sqrt{54}}{{\mathrm{6s}}_{\text{II}}^{2}}(\frac{\partial \det(\underline{\underline{s}})}{\partial {s}_{ij}})\right]\) éq 4.1.1.1-1
Dérivée intermédiaire par rapport aux contraintes#
On pose par définition: \({Q}_{ij}=\mathrm{dev}(\frac{\partial g}{\partial {s}_{ij}})\)
\(\frac{\partial g}{\partial {\sigma}_{ij}}=\frac{\partial g}{\partial {s}_{kl}}\frac{\partial {s}_{kl}}{\partial {\sigma}_{ij}}=\left[\mathrm{dev}(\frac{\partial g}{\partial {s}_{kl}})+\frac{1}{3}\frac{\partial g}{\partial {s}_{\text{mm}}}{\delta}_{kl}\right]\left[{\delta}_{\text{ik}}{\delta}_{\text{jl}}-\frac{1}{3}{\delta}_{ij}{\delta}_{kl}\right]\)
\(\frac{\partial g}{\partial {\sigma}_{ij}}={Q}_{kl}{\delta}_{\text{ik}}{\delta}_{\text{jl}}-\frac{1}{3}{\delta}_{ij}{Q}_{kl}{\delta}_{kl}+\frac{1}{3}\frac{\partial g}{\partial {q}_{\text{mm}}}\left[{\delta}_{\text{ik}}{\delta}_{\text{jl}}{\delta}_{kl}-\frac{1}{3}{\delta}_{ij}{\delta}_{kl}{\delta}_{kl}\right]\)
\(\frac{\partial g}{\partial {\sigma}_{ij}}={Q}_{ij}\)
Il suffit alors de prendre la partie déviatorique de \(\frac{\partial g}{\partial {s}_{ij}}\) pour obtenir:
\(\frac{\partial g}{\partial {\sigma}_{ij}}={Q}_{ij}=\mathrm{dev}(\frac{\partial g}{\partial {s}_{ij}})=\frac{1}{h{(\theta )}^{5}}\left[(1+\frac{{\gamma}_{\text{cjs}}}{2}\cos(3\theta ))\frac{{s}_{ij}}{{s}_{\text{II}}}+\frac{{\gamma}_{\text{cjs}}\sqrt{54}}{6{s}_{\text{II}}^{2}}\mathrm{dev}(\frac{\partial \det(\underline{\underline{s}})}{\partial {s}_{ij}})\right]\)
Et par conséquent:
\(Q=\frac{\partial g}{\partial \sigma }=\frac{1}{h{(\theta )}^{5}}\left[(1+\frac{{\gamma}_{\text{cjs}}}{2}\cos(3\theta ))\frac{s}{{s}_{\text{II}}}+\frac{{\gamma}_{\text{cjs}}\sqrt{54}}{6{s}_{\text{II}}^{2}}\mathrm{dev}(\frac{\partial \det(\underline{\underline{s}})}{\partial s})\right]\) éq 4.1.1.2-1
Expression finale de la dérivée du critère par rapport aux contraintes#
La dérivée du critère par rapport aux contraintes est alors:
\(\frac{\partial f}{\partial \sigma }=\frac{1}{a({\gamma}^{p})}{\frac{1}{{\sigma}_{c}{h}_{c}^{0}}}^{\frac{1}{a({\gamma}^{p})}}(g){r}^{\frac{1-a({\gamma}^{p})}{a({\gamma}^{p})}}Q-\frac{\partial u}{\partial \sigma }\) éq 4.1.1.3-1
avec
\(\frac{\partial u}{\partial \sigma }=-\frac{m({\gamma}^{p})k({\gamma}^{p})}{{\sigma}_{c}}(\frac{1}{\sqrt{6}{h}_{c}^{0}}Q+\frac{1}{3}I)\) éq 4.1.1.3-2
Dérivée par rapport à la variable d’écrouissage#
\(\frac{\partial f}{\partial {\gamma}^{p}}=-{(\frac{1}{a({\gamma}^{p})})}^{2}{(\frac{g(s)}{{\sigma}_{c}{h}_{c}^{0}})}^{\frac{1}{a({\gamma}^{p})}}\log(\frac{g(s)}{{\sigma}_{c}{h}_{c}^{0}}).\frac{\partial a}{\partial {\gamma}^{p}}-\frac{\partial u}{\partial {\gamma}^{p}}\) éq 4.1.2-1
avec
\(\frac{\partial u}{\partial {\gamma}^{p}}=-\frac{1}{\sqrt{6}{\sigma}_{c}}\frac{\partial (\mathrm{km})}{\partial {\gamma}^{p}}({\gamma}^{p})\frac{g}{{h}_{c}^{0}}-\frac{1}{3{\sigma}_{c}}\frac{\partial (\mathrm{km})}{\partial {\gamma}^{p}}({\gamma}^{p}){I}_{1}+\frac{\partial (\mathrm{ks})}{\partial {\gamma}^{p}}({\gamma}^{p})\) éq 4.1.2-2
Dérivée totale du critère par rapport au multiplicateur plastique#
Considérons la fonction:
\({f}^{}(\Delta \lambda )=f({s}^{e}-2\mu \Delta \lambda \tilde{G},{I}_{1}^{e}-\mathrm{3K}\Delta \lambdag ,{\gamma}^{{p}^{-}}+\Delta \lambda \sqrt{\frac{2}{3}}\tilde{{G}_{\text{II}}})\) éq 4.2-1
Où

est un tenseur fixe indépendant de . \(\Delta \lambda\) C’est de cette fonction dont nous cherchons le zéro pour trouver l’état de contrainte:
\(\frac{\partial f\text{*}}{\partial \Delta \lambda }=-\frac{\partial f}{\partial \sigma }.(2\mu \tilde{G}+\mathrm{KG}I)+\frac{\partial f}{\partial {\gamma}^{p}}\sqrt{\frac{2}{3}}\tilde{{G}_{\text{II}}}\) éq 4.2-2
Dérivées des paramètres par rapport à la variable d’écrouissage#
\(\lbrace \begin{array}{}\frac{\partial s}{\partial {\gamma}^{p}}=-\frac{1}{{\gamma}_{e}}\text{}\mathrm{si}{\gamma}^{p}<{\gamma}_{e}\\ \frac{\partial s}{\partial {\gamma}^{p}}=0\mathrm{si}{\gamma}^{p}\ge {\gamma}_{e}\end{array}\) éq 4.3-1
\(\lbrace \begin{array}{}\frac{\partial m}{\partial s}=-\frac{{\sigma}_{c}}{{\sigma}_{\text{p1}}}\text{}\mathrm{si}{\gamma}^{p}<{\gamma}_{e}\\ \frac{\partial m}{\partial s}=0\mathrm{si}{\gamma}^{p}\ge {\gamma}_{e}\end{array}\) éq 4.3-2
\(\lbrace \begin{array}{}\frac{\partial m}{\partial a}=-\frac{{\sigma}_{c}}{{\sigma}_{\text{p1}}}\log({m}_{\text{pic}}\frac{{\sigma}_{\text{p1}}}{{\sigma}_{c}}+1)\frac{{a}_{\text{pic}}}{{a}^{2}}{({m}_{\text{pic}}\frac{{\sigma}_{\text{p1}}}{{\sigma}_{c}}+1)}^{\frac{{a}_{\text{pic}}}{a}}\text{si}{\gamma}^{p}<{\gamma}_{e}\\ \frac{\partial m}{\partial a}=-\frac{{\sigma}_{c}}{{\sigma}_{\text{p2}}}\log({m}_{e}\frac{{\sigma}_{\text{p2}}}{{\sigma}_{c}})\frac{{a}_{e}}{{a}^{2}}{({m}_{e}\frac{{\sigma}_{\text{p2}}}{{\sigma}_{c}})}^{\frac{{a}_{\text{pic}}}{a}}\text{si}{\gamma}^{p}<{\gamma}_{e}\end{array}\) éq 4.3-3
\(\frac{\partial \Omega }{\partial {\gamma}^{p}}=\frac{({\gamma}_{\text{ult}}-{\gamma}_{e})}{{({\gamma}_{e})}^{\eta}}\frac{{a}_{e}-{a}_{\text{pic}}}{1-{a}_{e}}(\frac{\eta}{{\gamma}_{\text{ult}}-{\gamma}^{p}}{({\gamma}^{p})}^{\eta -1}+{({\gamma}^{p})}^{\eta}\frac{1}{{({\gamma}_{\text{ult}}-{\gamma}^{p})}^{2}})\) éq 4.3-4
\(\frac{\partial a}{\partial \Omega }=\frac{1-{a}_{\text{pic}}}{{(1+\Omega )}^{2}}\) éq 4.3-5
\(\begin{array}{cc}\frac{\partial m}{\partial {\gamma}^{p}}=\frac{\partial m}{\partial a}\frac{\partial a}{\partial {\gamma}^{p}}+\frac{\partial m}{\partial s}\frac{\partial s}{\partial {\gamma}^{p}}& \text{si}{\gamma}^{p}<{\gamma}_{e}\\ \frac{\partial m}{\partial {\gamma}^{p}}=\frac{\partial m}{\partial a}\frac{\partial a}{\partial {\gamma}^{p}}& \text{si}{\gamma}_{\text{ult}}(1-{10}^{\text{-3}})>{\gamma}^{p}\ge {\gamma}_{e}\\ \frac{\partial m}{\partial {\gamma}^{p}}=0& \text{si}{\gamma}_{\text{ult}}(1-{10}^{\text{-3}})<{\gamma}^{p}\end{array}\) éq 4.3-6
\(\begin{array}{cc}\frac{\partial k}{\partial {\gamma}^{p}}=-{(\frac{2}{3})}^{\frac{1}{\mathrm{2a}}}\log(\frac{2}{3})\frac{1}{{\mathrm{2a}}^{2}}\frac{\partial a}{\partial {\gamma}^{p}}& {\gamma}_{\text{ult}}(1-{10}^{\text{-3}})>{\gamma}^{p}\\ \frac{\partial k}{\partial {\gamma}^{p}}=0& \text{sinon}\end{array}\) éq 4.3-7
Opérateur tangent en vitesse#
La condition
\(\dot{f}=0\) éq 5-1
s’écrit:
\(\dot{f}=\frac{\partial f}{\partial {\sigma}_{ij}}\dot{{\sigma}_{ij}}+\frac{\partial f}{\partial {\gamma}^{p}}\dot{{\gamma}^{p}}=0\)
A partir de l’expression de la déformation déviatorique plastique cumulée et \({\gamma}^{p}=\sqrt{\frac{2}{3}{e}_{ij}^{p}{e}_{ij}^{p}}\) de la relation \(\dot{{e}^{p}}=\dot{\lambda}\tilde{G}\) , on trouve alors la condition:
\(\dot{f}=\frac{\partial f}{\partial {\sigma}_{ij}}\dot{{\sigma}_{ij}}+\frac{\partial f}{\partial {\gamma}^{p}}\dot{\sqrt{\frac{2}{3}}}\dot{\lambda}\tilde{{G}_{\text{II}}}=0\)
Ce qui nous donne pour le multiplicateur plastique:
\(\dot{\lambda}=\frac{-\frac{\partial f}{\partial {\sigma}_{ij}}\dot{{\sigma}_{ij}}}{\sqrt{\frac{2}{3}}\frac{\partial f}{\partial {\gamma}^{p}}\tilde{{G}_{\text{II}}}}\)
En considérant alors la relation contraintes/déformations:
\(\frac{\partial f}{\partial {\sigma}_{ij}}\dot{{\sigma}_{ij}}=\frac{\partial f}{\partial {\sigma}_{ij}}{D}_{ijkl}\dot{{\varepsilon}_{kl}}=\frac{\partial f}{\partial {\sigma}_{ij}}{D}_{ijkl}=\frac{\partial f}{\partial {\sigma}_{ij}}{D}_{ijkl}\dot{{\varepsilon}_{kl}}-\dot{\lambda}\frac{\partial f}{\partial {\sigma}_{ij}}{D}_{ijkl}{G}_{kl}\)
et en la reportant dans l’expression de \(\dot{\lambda}\) on peut écrire:
\(\dot{\lambda}=-\frac{\frac{\partial f}{\partial {\sigma}_{ij}}{D}_{ijkl}\dot{{\varepsilon}_{kl}}-\dot{\lambda}\frac{\partial f}{\partial {\sigma}_{ij}}{D}_{ijkl}{G}_{kl}}{\sqrt{\frac{2}{3}}\frac{\partial f}{\partial {\gamma}^{p}}\tilde{{G}_{\text{II}}}}\)
Soit:
\(\dot{\lambda}=-\frac{\frac{\partial f}{\partial {\sigma}_{ij}}{D}_{ijkl}\dot{{\varepsilon}_{kl}}}{\sqrt{\frac{2}{3}}\frac{\partial f}{\partial {\gamma}^{p}}\tilde{{G}_{\text{II}}}-\frac{\partial f}{\partial {\sigma}_{ij}}{D}_{ijkl}{G}_{kl}}\) éq 5-2
En reportant ce résultat dans l’expression de \(\dot{{\sigma}_{ij}}\) on trouve:
\(\dot{{\sigma}_{\text{ab}}}={D}_{\text{abcd}}(\dot{{\varepsilon}_{\text{cd}}}+\frac{\frac{\partial f}{\partial {\sigma}_{ij}}{D}_{ijkl}\dot{{\varepsilon}_{kl}}}{\sqrt{\frac{2}{3}}\frac{\partial f}{\partial {\gamma}^{p}}\tilde{{G}_{\text{II}}}-\frac{\partial f}{\partial {\sigma}_{ij}}{D}_{ijkl}{G}_{kl}}{G}_{\text{cd}})\) éq 5-3
Traitement numérique adapté aux modèles non réguliers#
La loi d’évolution du mécanisme plastique, définie au chapitre [§3], doit satisfaire la condition cinématique [éq 3.2.4-2]. La projection proposée sur la normale de l’hypersurface de déformation peut conduire à une «non-solution» qui se traduit par un échec du traitement numérique (voir l’interprétation graphique du chapitre [§6.1.3.3]). On propose dans ce chapitre de définir des règles de projection permettant de gérer les modèles dits «non-réguliers» en leur imposant une projection dite «au sommet du cône».
De plus, comme pour d’autres relations de comportement, on ajoute la possibilité de découper localement (aux points de Gauss) le pas de temps pour faciliter l’intégration numérique.
La projection au sommet du cône#
Définition de l’angle de projection#
On se place dans ce chapitre dans le cadre d’accroissement fini. Les équations traduisant le comportement élastique s’écrivent:
\(s={s}^{-}+2\mu (\Deltae -\Delta {r}^{p})={s}^{e}-2\mu \Delta {e}^{p}\) éq 6.1.1-1
\({I}_{1}={I}_{1}^{-}+\mathrm{3K}(\Delta {\varepsilon}_{\nu }-\Delta {\varepsilon}_{\nu }^{p})={I}_{1}^{e}-\Delta {\varepsilon}_{\nu }^{p}\) éq 6.1.1-2
On peut également exprimer la condition cinématique à partir du tenseur

(cf paragraphe [§3.2.4]):
\(\mathrm{n.}\Delta {\varepsilon}^{p}=0\) éq 6.1.1-3
En reportant les deux équations traduisant le comportement élastique dans l’expression précédente on trouve:
\(\Delta {e}^{p}=\frac{1}{2\mu }({s}^{e}-s)\) éq 6.1.1-4
\(\Delta {\varepsilon}_{\nu }^{p}=\frac{1}{\mathrm{3K}}({I}_{1}^{e}-{I}_{1})\) éq 6.1.1-5
On exprime alors la condition cinématique par la relation suivante:
\(\mathrm{n.}(\frac{1}{2\mu }({s}^{e}-s)+\frac{1}{\mathrm{3K}}(\frac{1}{\mathrm{3K}}({I}_{1}^{e}-{I}_{1})I))=0\) avec \(n=\frac{{\beta }^{'}\frac{s}{{s}_{\text{II}}}+I}{\sqrt{{\beta }^{\text{'2}}+3}}\)
Soit en combinant les deux relations précédentes où

désigne la normale de l’hypersurface de déformation:
\(\frac{1}{2\mu }\frac{{\beta }^{'}\frac{s}{{s}_{\text{II}}}+I}{\sqrt{{\beta }^{\text{'2}}+3}}({s}^{e}-s)+\frac{1}{\mathrm{9K}}({I}_{1}^{e}-{I}_{1}).\text{Tr}(n)=0\)
\(\frac{1}{2\mu }{\beta}^{'}\frac{s.({s}^{e}-s)}{{s}_{\text{II}}}+\frac{1}{\mathrm{3K}}({I}_{1}^{e}-{I}_{1})\)
Cette dernière équation définit le point

comme une projection du point

sur le critère. Le point

sera la projection oblique du point

, projection dont la direction varie avec \(\theta\) . On peut en donner la représentation graphique du chapitre [§6.1.3.3].
La relation précédente peut alors être réécrite comme suit:
\({I}_{1}^{e}-{I}_{1}=-{\beta }^{'}\frac{\mathrm{3K}}{2\mu }\frac{\mathrm{s.}({s}^{e}-s)}{{s}_{\text{II}}}\) éq 6.1.1-6
On définit alors l’angle de projection \({\phi }_{s}\) par la relation:
\(\cos{\phi }_{s}=\frac{\mathrm{s.}({s}^{e}-s)}{{s}_{\text{II}}\sqrt{({s}^{e}-s)({s}^{e}-s)}}\) éq 6.1.1-7
En reportant la définition de l’angle \({\phi }_{s}\) dans la relation de projection on trouve la relation:
\(\frac{{I}_{1}^{e}-{I}_{1}}{\sqrt{({s}^{e}-s)({s}^{e}-s)}}=-{\beta }^{'}\frac{\mathrm{3K}}{2\mu }\cos{\phi }_{s}\) éq 6.1.1-8
Existence de la projection#
Le principe de ce paragraphe est de discuter sur la question de l’existence de l’angle \({\phi }_{s}\) tel que la projection du point \(({I}_{1}^{e},{s}^{e})\) appartienne toujours à la surface de charge. Cette problématique apparaît essentielle pour des projections autour du sommet de la surface de charge, autrement dit quand \(s\to 0\) . On a par définition la relation:
\(\cos{\phi }_{s}=\frac{\mathrm{s.}({s}^{e}-s)}{{s}_{\text{II}}\sqrt{({s}^{e}-s)({s}^{e}-s)}}=\frac{\mathrm{s.}({s}^{e}-s)}{{s}_{\text{II}}∥{s}^{e}-s∥}\) éq 6.1.2-1
En combinant cette équation avec l’expression: \(s={s}^{e}-2\mu \Delta {e}^{p}={s}^{e}-2\mu \Delta \lambda \tilde{G}\)
On obtient:
\(\cos{\phi }_{s}=\frac{\mathrm{s.}\tilde{G}}{{s}_{\text{II}}\tilde{{G}_{\mathrm{II}}}}\) éq 6.1.2-2
On cherche une estimation de \(\cos{\phi }_{s}\) .
Étape 1: estimation de

On se place dans ce paragraphe sous les conditions: \(s\to 0\) et \(f=0\) .
Par définition de

et de

on a: \(\tilde{G}.s=(G-\frac{\text{Tr}(G)}{3}I).s=\mathrm{G.s}=(\frac{\partial f}{\partial \sigma }-(\frac{\partial f}{\partial \sigma }n)n).s\)
Pour des soucis de simplification de calcul on ramène la résolution de

à la résolution de l’équation:
\(f={(\frac{g(s)}{{\sigma}_{c}{h}_{c}^{0}})}^{\frac{1}{a({\gamma}^{p})}}-u(\sigma ,{\gamma}^{p})=0\Rightarrow {f}_{2}=(\frac{g(s)}{{\sigma}_{c}{h}_{c}^{0}})-u{(\sigma ,{\gamma}^{p})}^{a({\gamma}^{p})}=0\) éq 6.1.2.3
Par dérivation de cette nouvelle fonction on trouve la relation:
\(\frac{\partial {f}_{2}}{\partial \sigma }=(\frac{1}{{\sigma}_{c}{h}_{c}^{0}})\frac{\partial g}{\partial \sigma }-a({\gamma}^{p})u{(\sigma ,{\gamma}^{p})}^{a({\gamma}^{p})-1}\frac{\partial u}{\partial \sigma }=(\frac{1}{{\sigma}_{c}{h}_{c}^{0}})Q-a({\gamma}^{p})u{(\sigma ,{\gamma}^{p})}^{a({\gamma}^{p})-1}\frac{\partial u}{\partial \sigma }\)
avec: \(\frac{\partial u}{\partial \sigma }=-\frac{m({\gamma}^{p})k({\gamma}^{p})}{{\sigma}_{c}}(\frac{1}{\sqrt{6}{h}_{c}^{0}}Q+\frac{1}{3}I)\)
Qui donne après simplification:
\(\frac{\partial {f}_{2}}{\partial \sigma }=AQ+BI\) éq 6.1.2.4
Où:
\(\lbrace \begin{array}{}A=\frac{1}{{\sigma}_{c}{h}_{c}^{0}}(1+\frac{a({\gamma}^{p})m({\gamma}^{p})k({\gamma}^{p})}{\sqrt{6}}{u(\sigma ,{\gamma}^{p})}^{a({\gamma}^{p})-1})\\ B=\frac{a({\gamma}^{p})m({\gamma}^{p})k({\gamma}^{p})}{3{\sigma}_{c}{h}_{c}^{0}}{u(\sigma ,{\gamma}^{p})}^{a({\gamma}^{p})-1}\end{array}\) éq 6.1.2.5
On a ainsi: \(\frac{\partial {f}_{2}}{\partial \sigma }.n=(AQ+bI)\frac{\beta '\frac{s}{{s}_{\text{II}}}+I}{\sqrt{\beta {'}^{2}+3}}=\frac{\beta '}{\sqrt{\beta {'}^{2}+3}}\frac{A}{{s}_{\text{II}}}\mathrm{Q.}s+\frac{\mathrm{3B}}{\sqrt{\beta {'}^{2}+3}}\)
Et par voie de conséquence:
\(\tilde{G}.s=(\frac{\partial f}{\partial \sigma }-(\frac{\partial f}{\partial \sigma }n)n).s\)
\(=(AQ+BI-(\frac{\beta '}{\sqrt{\beta {'}^{2}+3}}\frac{A}{{s}_{\text{II}}}\mathrm{Q.}s+\frac{\mathrm{3B}}{\sqrt{\beta {'}^{2}+3}})\frac{\beta '\frac{s}{{s}_{\text{II}}}+I}{\sqrt{\beta {'}^{2}+3}})\)
\(=\frac{\mathrm{3A}}{\beta {'}^{2}+3}\mathrm{Q.}s-\frac{\mathrm{3B}\beta '}{\beta {'}^{2}+3}{s}_{\text{II}}\)
D’où l’on déduit que:
\(\frac{\tilde{G}.s}{{s}_{\text{II}}}=\frac{\mathrm{3A}}{\beta {'}^{2}+3}\frac{\mathrm{Q.}s}{{s}_{\text{II}}}-\frac{\mathrm{3B}\beta '}{\beta {'}^{2}+3}\) éq 6.1.2.6
Par définition de

on a:
\(Q.s=\text{dev}(\frac{\partial g}{\partial s}).s=\frac{1}{{h(\theta )}^{5}}\left[(1+\frac{{\gamma}_{\text{cjs}}}{2}\cos(3\theta ))\frac{s}{{s}_{\text{II}}}+\frac{{\gamma}_{\text{cjs}}\sqrt{54}}{6{s}_{\text{II}}^{2}}\text{dev}()\right].s\)
\(=\frac{1}{{h(\theta )}^{5}}(1+\frac{{\gamma}_{\text{cjs}}}{2}\cos(3\theta )){s}_{\text{II}}\)
\(=h(\theta ){s}_{\text{II}}\)
On exprime finalement:
\(\frac{\tilde{G}.s}{{s}_{\text{II}}}=\frac{\mathrm{3A}}{\beta {'}^{2}+3}h(\theta )-\frac{3\beta '}{\beta {'}^{2}+3}\) éq 6.1.2.7
Quand \(s\to 0\) alors \(u(\sigma ,{\gamma}^{p})\to 0\text{et}A\to \frac{1}{{\sigma}_{c}{h}_{c}^{0}},B\to 0\)
Et donc:
Quand \(s\to 0\) alors \(\frac{\tilde{G}.s}{{s}_{\text{II}}}\underset{s\to 0}{\to }\frac{\mathrm{3h}(\theta )}{{\sigma}_{c}{h}_{c}^{0}(\beta {'}^{2}+3)}\) éq 6.1.2.8
Étape 2: estimation de

On se place dans ce paragraphe sous les conditions: \(s\to 0,A\to \frac{1}{{\sigma}_{c}{h}_{c}^{0}},b\to 0\)
\(\tilde{G}=(\frac{\partial f}{\partial \sigma }-(\frac{\partial f}{\partial \sigma }n)n)\)
\((\frac{1}{{\sigma}_{c}{h}_{c}^{0}}Q+BI-(\frac{\beta '}{\sqrt{\beta {'}^{2}+3}}\frac{1}{{\sigma}_{c}{h}_{c}^{0}{s}_{\text{II}}}\mathrm{Q.}s+\frac{\mathrm{3B}}{\sqrt{\beta {'}^{2}+3}})\frac{\beta '\frac{s}{{s}_{\text{II}}}+I}{\sqrt{\beta {'}^{2}+3}})\)
\(\frac{1}{{\sigma}_{c}{h}_{c}^{0}}Q-\frac{\beta {'}^{2}h(\theta )}{(\beta {'}^{2}+3){\sigma}_{c}{h}_{c}^{0}{s}_{\text{II}}}s\)
\(\tilde{{G}_{\text{II}}^{2}}\tilde{G}.\tilde{G}=\frac{{Q}_{\text{II}}^{2}}{{({\sigma}_{c}{h}_{c}^{0})}^{2}}+\frac{\beta {'}^{4}{h}^{2}(\theta ){s}_{\text{II}}^{2}}{{(\beta {'}^{2}+3)}^{2}{({\sigma}_{c}{h}_{c}^{0})}_{2}{s}_{\text{II}}^{2}}-2\frac{\beta {'}^{2}{h}^{2}(\theta )}{(\beta {'}^{2}+3){({\sigma}_{c}{h}_{c}^{0})}^{2}}\)
\(\frac{1}{{{\sigma}_{c}{h}_{c}^{0}}^{2}}({Q}_{\text{II}}^{2}-\frac{\beta {'}^{2}(\beta {'}^{2}+6){h}^{2}(\theta )}{{(\beta {'}^{2}+3)}^{2}})\)
On démontre [Annexe 2] que:
\({Q}_{\text{II}}^{2}=\frac{1}{{h(\theta )}^{10}}\left[{(1+\frac{{\gamma}_{\text{cjs}}}{2}\cos(3\theta ))}_{2}+\frac{{\gamma}_{\text{cjs}}^{2}}{4}+{\gamma}_{\text{cjs}}\cos(3\theta )(1+\frac{{\gamma}_{\text{cjs}}}{2}\cos(3\theta ))\right]\) éq 6.1.2.9
et donc comme \(h(\theta )={(1+\cos(3\theta ))}^{1/6}\) :
\(\tilde{{G}_{\text{II}}^{2}}=\frac{1}{{{\sigma}_{c}{h}_{c}^{2}}^{2}}(\frac{1}{{h(\theta )}^{10}}\left[{(\frac{1}{2}+\frac{{h(\theta )}^{6}}{2})}^{2}+\frac{{{\gamma}_{\text{cjs}}}^{2}}{4}+({h(\theta )}^{6}-1)(\frac{1}{2}+\frac{{h(\theta )}^{6}}{2})\right]-\frac{\beta {'}^{2}(\beta {'}^{2}+6){h}^{2}(\theta )}{{(\beta {'}^{2}+3)}^{2}})\)
\(\tilde{{G}_{2}^{\text{II}}}=\frac{1}{{({\sigma}_{c}{h}_{c}^{0})}^{2}}(\frac{{\mathrm{3h}(\theta )}^{\mathrm{2 }}}{4}+\frac{1}{{2h(\theta )}^{4}}+\frac{{\gamma}_{\text{cjs}}^{2}-1}{{\mathrm{4h}(\theta )}^{10}}-\frac{\beta {'}^{2}(\beta {'}^{2}+6){h}^{2}(\theta )}{{\beta {'}^{2}+3}^{2}})\)
\(\tilde{{G}_{\text{II}}^{2}}={(\frac{h(\theta )}{{\sigma}_{c}{h}_{c}^{0}})}^{2}\left[\frac{1}{{\mathrm{2h}(\theta )}^{6}}+\frac{{\gamma}_{\text{cjs}}^{2}-1}{{4h(\theta )}^{12}}+{(\frac{3}{\beta {'}^{2}+3})}^{2}-\frac{1}{4}\right]\)
Et par conséquent :
\(\tilde{{G}_{\text{II}}}=(\frac{h(\theta )}{{\sigma}_{c}{h}_{c}^{0}})\sqrt{{(\frac{\mathrm{3 }}{\beta {'}^{2}+3})}^{2}-\frac{1}{4}+\frac{1}{{\mathrm{2h}(\theta )}^{6}}+\frac{{\gamma}_{\text{cjs}}^{2}-1}{{\mathrm{4h}(\theta )}^{12}}}\) éq 6.1.2.10
Étape 3: estimation de \(\cos({\phi }_{s})\)
On déduit des deux paragraphes précédent l’expression de l’angle de projection suivante:
Quand \(s\to 0\) alors:
\(\cos{\phi }_{s}\mathrm{tward}\frac{3}{(\beta {'}^{2}+3)\sqrt{{\frac{3}{\beta {'}^{2}+3}}^{2}-\frac{1}{4}+\frac{1}{2(1+{\gamma}_{\text{cjs}}\cos(3\theta ))}+\frac{{\gamma}_{\text{cjs}}^{2}-1}{{4(1+{\gamma}_{\text{cjs}}\cos(3\theta ))}^{2}}}}\) éq 6.1.2.11
On remarque que \({\phi }_{s}\) dépend de l’angle de Lode \(\theta\) , et que par voie de conséquence la limite de l’angle de projection quand \(s\to 0\) n’existe pas. Cependant un encadrement de \(\cos{\phi }_{s}\) nous permet de déterminer une zone de projection au sommet à priori (démonstration de l’encadrement en [Annexe3]):
avec: \(\begin{array}{}\cos{\phi }_{s}^{\min}\le \cos{\phi }_{s}\le \cos{\phi }_{s}^{\max}\\ \lbrace \begin{array}{}\cos{\phi }_{s}^{\min}=\frac{3}{(\beta {'}^{2}+3)\sqrt{{(\frac{3}{\beta {'}^{2}+3})}^{2}+\frac{{{\gamma}_{\text{cjs}}}^{2}}{4(1-{\gamma}_{\text{cjs}}^{2})}}}\\ \cos{\phi }_{s}^{\max}=1\end{array}\end{array}\) éq 6.1.2.12
Règles de projection#
On appelle \({I}_{1}^{0}\) l’intersection du domaine de réversibilité avec l’axe hydrostatique. On obtient:
\({I}_{1}^{0}=\frac{3{\sigma}_{c}.s({\gamma}_{p})}{m({\gamma}_{p})}\) éq 6.1.3-1
En reportant \({I}_{1}^{0}\) et l’encadrement de \(\cos{\phi }_{s}\) , quand \(s\to 0\) , dans la relation \(\frac{{I}_{1}^{e}-{I}_{1}}{\sqrt{({s}^{e}-s)({s}^{e}-s)}}=-\beta '\frac{\mathrm{3K}}{2\mu }\cos{\phi }_{s}\) , on en déduit les règles de projection suivantes en fonction du signe du paramètre de dilatance \(\beta '\) , et pour des valeurs de \({I}_{1}^{e}\) et de \({s}_{\text{II}}^{e}\) données.
Cas où le paramètre de dilatance est négatif#
Si \(\frac{{I}_{1}^{e}-{I}_{1}^{0}}{{s}_{\text{II}}^{e}}<-\beta '\frac{\mathrm{3K}}{2\mu }\cos{\phi }_{s}^{\min}\) alors la projection sera régulière;
Si \(\frac{{I}_{1}^{e}-{I}_{1}^{0}}{{s}_{\text{II}}^{e}}>-\beta '\frac{\mathrm{3K}}{2\mu }\cos{\phi }_{s}^{\max}\) alors la projection sera au sommet.
Cas où le paramètre de dilatance est positif#
Si \(\frac{{I}_{1}^{e}-{I}_{1}^{0}}{{s}_{\text{II}}^{e}}<-\beta '\frac{\mathrm{3K}}{2\mu }\cos{\phi }_{s}^{\max}\) alors la projection sera régulière;
Si \(\frac{{I}_{1}^{e}-{I}_{1}^{0}}{{s}_{\text{II}}^{e}}>-\beta '\frac{\mathrm{3K}}{2\mu }\cos{\phi }_{s}^{\min}\) alors la projection sera au sommet.
Interprétation graphique#
Équations d’écoulement#
Dans la zone intermédiaire on résout les équations correspondant à une projection régulière. Si cette résolution ne donne pas de solution on résout alors les équations d’écoulement de la projection au sommet.
Dans le cas de la projection au sommet on a les relations:
\(s=0\) éq 6.1.3.4-1
\({I}_{1}^{0}=\frac{3{\sigma}_{c}.s({\gamma}^{p})}{m({\gamma}^{p})}\) éq 6.1.3.4-2
\(\Delta {\gamma}^{p}=\frac{1}{2\mu }\sqrt{\frac{2}{3}}{s}_{\text{II}}^{e}\) éq 6.1.3.4-3
Redécoupage local du pas de temps#
Comme pour d’autres relations de comportement (le modèle CJS par exemple) on a ajouté la possibilité pour le modèle de LAIGLE de redécouper localement (aux points de Gauss) le pas de temps afin de faciliter l’intégration numérique. Cette possibilité est gérée par l’opérande ITER_INTE_PAS du mot-clé CONVERGENCE de l’opérateur STAT_NON_LINE. Si la valeur de ITER_INTE_PAS (itepas) vaut 0,1 ou –1 il n‘y a aucun redécoupage (remarque: 0 est la valeur par défaut). Si itepas est positif le redécoupage est systématique, s’il est négatif le redécoupage est pris en compte uniquement en cas de non convergence numérique.
Le redécoupage consiste à réaliser l’intégration du mécanisme plastique avec un incrément de déformation dont les composantes correspondent aux composantes de l’incrément de déformation initial divisées par la valeur absolue de itepas (cf doc STAT_NON_LINE [U4.51.03]).
Les variables internes#
Pour la mise en œuvre informatique nous avons retenu les 4 variables internes suivantes:
V1 : la déformation déviatoire plastique cumulée#
La variable d’écrouissage \({\gamma}^{p}\) est proportionnelle au deuxième invariant du tenseur des déformations déviatoires.
\({\gamma}^{p}=\sqrt{\frac{2}{3}{e}_{ij}^{p}{e}_{ij}^{p}}\)
avec \({e}_{ij}^{p}={\varepsilon}_{ij}^{p}-\frac{\text{tr}({\varepsilon}_{ij}^{p})}{3}{\delta}_{ij}\)
V2 : la déformation volumique plastique cumulée#
La déformation volumique plastique est définie par la relation présentée au paragraphe [§3.2.4] sur la loi d’évolution du mécanisme plastique: \(\dot{{\varepsilon}_{v}^{p}}=\dot{\lambda}G\)
V3 : les domaines de comportement de la roche#
Cinq domaines de comportement, numérotés de 0 à 4 (cf. figure), sont identifiés pour permettre d’avoir une représentation relativement simple de l’état d’endommagement de la roche, depuis la roche intacte jusqu’à la roche à l’état résiduel. Ces domaines sont fonction de la déformation déviatoire plastique cumulée \({\gamma}^{p}\) et de l’état de contrainte. Chaque incrément de numéro de domaine définit le passage dans un domaine d’endommagement supérieur.
Si le déviateur est inférieur à 70% du déviateur de pic, alors le matériau est dans le domaine 0;
Sinon:
Si \({\gamma}^{p}=0\) alors le matériau est dans le domaine 1;
Si \(0<{\gamma}^{p}<{\gamma}^{e}\) alors le matériau est dans le domaine 2;
Si \({\gamma}_{e}<{\gamma}^{p}<{\gamma}_{\text{ult}}\) alors le matériau est dans le domaine 3;

Si \({\gamma}^{p}>{\gamma}_{\text{ult}}\) alors le matériau est dans le domaine 4.

V4 : l’état de plastification#
C’est un indicateur interne au Code_Aster . Il vaut 0 si le point de gauss est en charge élastique ou en décharge, et vaut 1 si le point de gauss est en charge plastique.
Présentation détaillée de l’algorithme#
On retient une formulation implicite par rapport au critère et explicite par rapport à la direction d’écoulement: le critère devra être vérifié à la fin du pas, alors que la direction d’écoulement sera celle calculée au début du pas (et donc la valeur de la dilatance sera également celle calculée au début du pas de temps).
On se place en un point matériel, et on considère que sont donnés:
Le tenseur d’accroissement des déformations \(\Delta \varepsilon\) d’où l’on déduit \(\Deltae\) et ; \(\Delta {\varepsilon}_{\nu }\)
Les contraintes au début du pas d \({\sigma}^{-}\) ’où l’on déduit \({s}^{-}\) et \({I}_{1}^{-}\) ;
Les valeurs des variables internes au début du pas de temps(seule la déformation plastique cumulée \({\gamma}^{{p}^{-}}\) est nécessaire).
Il s’agit de calculer:
Les contraintes en fin de pas de temps \(\sigma\) ;
Les variables internes en fin du pas de temps (\({\gamma}^{p}\) , \({\varepsilon}_{\nu }^{p}\) , les domaines de comportement);
Le comportement tangent en fin de pas: \(\frac{\partial \sigma }{\partial \varepsilon }\)
Calcul de la solution élastique#
\(\begin{array}{}\Delta {\varepsilon}^{e}=\Delta {\varepsilon}^{-}-\alpha \Deltat \\ {s}^{e}={s}^{-}+2\mu \Deltae \\ {I}_{}^{e}={I}_{1}^{-}+\mathrm{3K}\Delta {\varepsilon}_{\nu }\end{array}\)
Calcul du critère élastique#
Calcul de \({g}^{e}={s}_{\text{II}}^{e}h({\theta}^{e})\)
Calcul de , \({m}^{-}=m({\gamma}^{{p}^{-}})\) \({s}^{-}=s({\gamma}^{{p}^{-}})\) , \({a}^{-}=a({\gamma}^{{p}^{-}})\) et \({k}^{-}=k({a}^{-})\)
Calcul de \({u}^{e}=-\frac{{m}^{-}{k}^{-}}{\sqrt{6}{\sigma}_{c}}\frac{{g}^{e}}{{h}_{c}^{0}}-\frac{{m}^{-}{k}^{-}}{3{\sigma}_{c}}{I}_{1}^{e}+{s}^{-}.{k}^{-}\)
Calcul de \({f}^{e}={(\frac{{g}^{e}}{{\sigma}_{c}{h}_{c}^{0}})}^{\frac{1}{{a}^{-}}}-{u}^{e}\)
Algorithme#
Si \({f}^{e}>0\)
Calcul de:
\(\begin{array}{}{I}_{1}^{\text{0-}}=\frac{3{\sigma}_{c}.{s}^{-}}{{m}^{-}};\text{}{g}^{-}=g({s}^{-})\\ {\varphi}_{0}^{-}={\varphi}_{0}({m}^{-},{s}^{-},{a}^{-});{C}_{0}^{-}={C}_{0}({m}^{-},{s}^{-},{a}^{-});{\sigma}_{0}^{-}={\sigma}_{\text{t0}}({\varphi}_{0}^{-},{C}_{0}^{-})\\ \alpha {'}^{-}=\alpha '({I}_{1}^{-},{g}^{-},{\sigma}_{\text{t0}}^{-});{\psi}^{-}=\psi (\alpha {'}^{-});\beta {'}^{-}=\beta '({\psi}^{-})\end{array}\)
Calcul à priori de la projection au sommet
\(s=0\) ; Calcul de \({\gamma}^{p}={\gamma}^{{p}^{-}}+\frac{1}{2\mu }\sqrt{\frac{2}{3}}{s}_{\text{II}}^{e}={\gamma}^{{p}^{\text{sommet}}}\) et de \({I}_{1}=\frac{3{\sigma}_{c}.s({\gamma}^{p})}{m({\gamma}^{p})}={I}_{1}^{\text{sommet}}\) .
Si \(\lbrace \begin{array}{}({I}_{1}^{e}-{I}_{1}^{\text{sommet}})<-\frac{\mathrm{3K}}{2\mu }\beta '{s}_{n}^{e}\cos{\phi }_{s}^{\max};\text{si}\beta {'}^{-}<0\\ ({I}_{1}^{e}-{I}_{1}^{\text{sommet}})<-\frac{\mathrm{3K}}{2\mu }\beta '{s}_{n}^{e}\cos{\phi }_{s}^{\min};\text{si}\beta {'}^{-}\ge 0\end{array}\)
La projection au sommet n’est pas retenue à priori. On calcule la solution régulière.
\({Q}^{-}=\lbrace \begin{array}{}Q({\sigma}^{-})\text{si}{\sigma}^{-}\ne 0\\ Q({\sigma}^{\text{e}})\text{si}{\sigma}^{-}=0\end{array}\) \({n}^{f}=\lbrace \begin{array}{}n(\beta {'}^{-},{\sigma}^{-})\text{si}{\sigma}^{-}\ne 0\\ n(\beta {'}^{\text{e}},{\sigma}^{\text{e}})\text{si}{\sigma}^{-}=0\end{array}\) \({G}^{f}=\lbrace \begin{array}{}G(\beta {'}^{-},{\sigma}^{-})\text{si}{\sigma}^{-}\ne 0\\ G(\beta {'}^{\text{e}},{\sigma}^{\text{e}})\text{si}{\sigma}^{-}=0\end{array}\)
Si \({\gamma}^{{p}^{-}}=0\)
Initialisation \(\Delta {\lambda}^{0}=0;{\gamma}^{{p}^{0}}={\gamma}^{{p}^{-}};{s}^{0}={s}^{e};{I}_{1}^{0}={I}_{1}^{e};{f}^{0}={f}^{e}\)
Et \(\lbrace \begin{array}{}\Delta {\gamma}^{{p}^{1}}=\frac{1}{10}\max\mid \Delta {\varepsilon}_{ij}^{e}\mid \\ \delta {\lambda}^{{p}^{1}}=\frac{\Delta {\gamma}^{{p}^{1}}}{\tilde{{G}_{\text{II}}^{{f}_{b}}}}\sqrt{\frac{2}{3}}\end{array}\)
Sinon
Calcul de l’accroissement du multiplicateur plastique \(\Delta \lambda\) par Newton:
Initialisation \(\Delta {\lambda}^{0}=0;{\gamma}^{{p}^{0}}={\gamma}^{{p}^{-}};{s}^{0}={s}^{e};{I}_{1}^{0}={I}_{1}^{e};{f}^{0}={f}^{e}\)
\({\frac{\partial u}{\partial \sigma }}^{0}={\frac{\partial u}{\partial \sigma }}^{-}=-\frac{{m}^{-}}{\sqrt{6}{\sigma}_{c}}\frac{{k}^{-}}{{h}_{c}^{0}}{Q}^{-}-{k}^{-}\frac{{m}^{-}}{3{\sigma}_{c}}I\)
\({\frac{\partial u}{\partial {\gamma}^{p}}}^{0}=-\frac{1}{\sqrt{6}{\sigma}_{c}}\frac{\partial (\mathrm{km})}{{\gamma}^{p}}({\gamma}^{{p}^{-}})\frac{{g}^{e}}{{h}_{c}^{0}}-\frac{1}{3{\sigma}_{c}}\frac{\partial (\mathrm{km})}{\partial {\gamma}^{p}}({\gamma}^{{p}^{-}}){I}_{1}^{e}+\frac{\partial (\mathrm{ks})}{\partial {\gamma}^{p}}({\gamma}^{{p}^{-}})\)
\(\frac{\partial {f}^{0}}{\partial \sigma }=\frac{1}{{a}^{-}}{(\frac{1}{{\sigma}_{c}{h}_{c}^{0}})}^{\frac{1}{{a}^{-}}}({g}^{e})\frac{1-{a}^{-}}{{a}^{-}}{Q}^{-}-{\frac{\partial u}{\partial \sigma }}^{0}\ne {\frac{\partial f}{\partial \sigma }}^{-}\)
\(\frac{\partial {f}^{0}}{\partial {\gamma}^{p}}=-{(\frac{1}{{a}^{-}})}^{2}{(\frac{{g}^{e}}{{\sigma}_{c}{h}_{c}^{0}})}^{\frac{1}{{a}^{-}}}\log(\frac{{g}^{e}}{{\sigma}_{c}{h}_{c}^{0}})\frac{\partial a}{\partial {\gamma}^{p}}({\gamma}^{{p}^{-}})-\frac{\partial {u}^{0}}{\partial {\gamma}^{p}}\ne \frac{\partial {f}^{-}}{\partial {\gamma}^{p}}\)
\(\frac{\partial {f}^{{0}^{\text{*}}}}{\partial \Delta \lambda }=-\frac{\partial {f}^{0}}{\partial \sigma }.(2\mu \tilde{{G}^{f}}+{\mathrm{KG}}^{f}I)+\frac{\partial {f}^{0}}{\partial {\gamma}^{p}}\sqrt{\frac{2}{3}}\tilde{{G}_{\text{II}}^{f}}\)
Boucle itérations n
\(\frac{\partial {f}^{n}}{\partial \Delta \lambda }\delta {\lambda}^{n+1}=-{f}^{n}\)
\(\Delta {\lambda}^{n+1}=\Delta {\lambda}^{n}+\delta {\lambda}^{n+1}\)
\(\Delta {\gamma}^{{p}^{n+1}}={\Delta \gamma }^{n+1}\sqrt{\frac{2}{3}}\tilde{{G}_{\text{II}}^{f}};\Delta {\varepsilon}_{v}^{p}={\Delta \lambda }^{n+1}{G}^{f}\)
\({s}^{n+1}={s}^{e}-2\mu \Delta {\lambda}^{{p}^{n+1}}\tilde{{G}^{f}};{I}_{1}^{n+1}={I}_{1}^{e}-\mathrm{3K}\Delta {\lambda}^{{p}^{n+1}}{G}^{f}\)
Si \(\Delta {\gamma}^{{p}^{n+1}}<0\) Non convergence
Calcul \({Q}^{n+1}\)
\({g}^{n+1}=g({s}^{n+1});{m}^{n+1}=m({\gamma}^{{p}^{n+1}});{s}^{n+1}=s({\gamma}^{{p}^{n+1}});{a}^{n+1}=a({\gamma}^{{p}^{n+1}});{k}^{n+1}=k({a}^{n+1})\)
\({u}_{n+1}=-\frac{{m}^{n+1}{k}^{n+1}}{\sqrt{6}{\sigma}_{c}}\frac{{g}^{n+1}}{{h}_{c}^{0}}-\frac{{m}^{n+1}{k}^{n+1}}{3{\sigma}_{c}}{I}_{1}^{n+1}+{s}^{n+1}.{k}^{n+1}\)
\({f}^{n+1}={(\frac{{g}^{n+1}}{{\sigma}_{c}{h}_{c}^{0}})}^{\frac{1}{{a}^{n+1}}}-{u}^{n+1}\)
\({\frac{\partial u}{\partial \sigma }}^{n+1}=-\frac{m}{\sqrt{6}{\sigma}_{c}}\frac{{k}^{n+1}}{{h}_{c}^{0}}{Q}^{n+1}-{k}^{n+1}\frac{{m}^{n+1}}{3{\sigma}_{c}}I\)
\({\frac{\partial u}{\partial {\gamma}^{p}}}^{n+1}=-\frac{1}{\sqrt{6}{\sigma}_{c}}\frac{\partial (\mathrm{km})}{\partial {\gamma}^{p}}({\gamma}^{{p}^{n+1}})\frac{{g}^{n+1}}{{h}_{c}^{0}}-\frac{1}{3{\sigma}_{c}}\frac{\partial (\mathrm{km})}{\partial {\gamma}^{p}}({\gamma}^{{p}^{n+1}}){I}_{1}^{n+1}+\frac{\partial (\mathrm{ks})}{\partial {\gamma}^{p}}({\gamma}^{{p}^{n+1}})\)
\(\frac{\partial {f}^{n+1}}{\partial \sigma }=\frac{1}{{a}^{n+1}}{(\frac{A}{{\sigma}_{c}{h}_{c}^{0}})}^{\frac{1}{{a}^{n+1}}}{({g}^{n+1})}^{\frac{A-{a}^{n+1}}{{a}^{n+1}}}{Q}^{n+1}-{\frac{\partial u}{\partial \sigma }}^{n+1}\)
\(\frac{\partial {f}^{n+1}}{\partial {\gamma}^{p}}=-{(\frac{1}{{a}^{n+1}})}^{2}{(\frac{{g}^{n+1}}{{\sigma}_{c}{h}_{c}^{0}})}^{\frac{1}{{a}^{n+1}}}\log(\frac{{g}^{n+1}}{{\sigma}_{c}{h}_{c}^{0}})\frac{\partial \alpha }{\partial {\gamma}^{p}}({\gamma}^{{p}^{n+1}})-\frac{\partial {u}^{n+1}}{\partial {\gamma}^{p}}\)
\(\frac{\partial {f}^{{n+1}^{\text{*}}}}{\partial \Delta \lambda }=-\frac{\partial {f}^{n+1}}{\partial \sigma }.(2\mu \tilde{{G}^{f}}+{\mathrm{KG}}^{f}I)+\frac{\partial {f}^{n+1}}{\partial {\gamma}^{p}}\sqrt{\frac{2}{3}}\tilde{{G}_{\text{II}}^{f}}\)
Si \(\mid {f}^{n+1}\text{/}{\sigma}_{c}\mid >{\varepsilon}_{\text{prec}}\)
n=n+1
Si n > nbre ite internes max
Si \(\lbrace \begin{array}{}({I}_{1}^{e}-{I}_{1}^{\text{sommet}})>-\frac{\mathrm{3K}}{2\mu }\beta '{s}_{\text{II}}^{e}\cos{\phi }_{s}^{\min}\text{;si}\beta '<0\\ ({I}_{1}^{e}-{I}_{1}^{\text{sommet}})>-\frac{\mathrm{3K}}{2\mu }\beta '{s}_{\text{II}}^{e}\cos{\phi }_{s}^{\max}\text{;si}\beta '\ge 0\end{array}\)
On retient la projection au sommet: \(s=0;{I}_{1}={I}_{1}^{\text{sommet}};{\gamma}^{p}={\gamma}^{{p}^{\text{sommet}}}\)
Sinon
Non convergence
Sinon
Non convergence
Sinon
Convergence
Si FULL_MECA
Calcul de:
\(\frac{{\partial \sigma }^{n+1}}{\partial \varepsilon }=H+\frac{H.{G}^{f}.{(\frac{\partial {f}^{n+1}}{\partial \sigma })}_{T}H}{\sqrt{\frac{2}{3}}\frac{\partial {f}^{n+1}}{\partial {\gamma}^{p}}\tilde{{G}_{\text{II}}^{f}}-{(\frac{\partial {f}^{n+1}}{\partial \sigma })}^{T}H{G}^{f}}\)
Symétrisationmécanique :
\(\frac{\partial {\sigma}_{\text{sym}}^{n+1}}{\partial \varepsilon }=\frac{1}{2}(\frac{\partial {\sigma}^{n+1}}{\partial \varepsilon }+\frac{\partial {\sigma}^{{n+1}^{T}}}{\partial \varepsilon })\)
Variante sur l’expression du critère de plasticité#
Dans cette proposition variante, on exprime le critère de plasticité en fonction du premier invariant et du déviateur des contraintes, par un recalage sur un triaxial en compression et en extension par les relations suivantes:
Formulation générale#
\(f={(\frac{{s}_{\text{II}}}{{\sigma}_{c}})}^{\frac{1}{a({\gamma}^{p})}}-u(\sigma ,{\gamma}^{p})\le 0\) éq 9.1-1
Où l’expression de \(u(\sigma ,{\gamma}^{p})\) est:
Si \({\gamma}_{\text{cjs}}\ne 0\)
\(u(\sigma ,{\gamma}^{p})=-\frac{m({\gamma}^{p})k({\gamma}_{p})}{\sqrt{6}{\sigma}_{c}}(\frac{h(\theta )+{h}_{t}^{0}-{\mathrm{2h}}_{c}^{0}}{{h}_{t}^{0}-{h}_{c}^{0}})-\frac{m({\gamma}^{p})k({\gamma}^{p})}{3{\sigma}_{c}}{I}_{1}+s({\gamma}^{p}).k({\gamma}^{p})\) éq 9.1-2
Si \({\gamma}_{\text{cjs}}=0\)
\(u(\sigma ,{\gamma}^{p})=-\frac{m({\gamma}^{p})k({\gamma}_{p})}{\sqrt{6}{\sigma}_{c}}(\frac{3}{2}+\frac{1}{2}\cos(3\theta ))-\frac{m({\gamma}^{p})k({\gamma}^{p})}{3{\sigma}_{c}}{I}_{1}+s({\gamma}^{p}).k({\gamma}^{p})\) éq 9.1-3
Allure des seuils#
On se place dans le cas où \({\gamma}_{\text{cjs}}=0.7;m=21;s=1;a=1\) , puis on trace l’allure des seuils dans le plan perpendiculaire à l’axe hydrostatique (dit plan \(\pi\) ), on normalise par rapport à et on \({\sigma}_{c}\) considère les deux valeurs de confinements telles que \({I}_{1}=0\) [Figure 9.2-a] et \({I}_{1}=-3{\sigma}_{c}\) [Figure9.2‑b].

Figure 9.2-a: Allur

e des seuils pour un confinement nul
Figure 9.2-b: Allure des seuils pour un confinement en compression nul
On constate dans ces représentations graphiques que la formulation bis a l’inconvénient d’avoir une allure non convexe dans le plan \(\pi\) .
Fonctionnalités et vérification#
La loi de comportement peut être définie par le mot-clé LAIGLE (commande STAT_NON_LINE, mot clé facteur COMPORTEMENT). Elle est associée au matériau LAIGLE (commande DEFI_MATERIAU).
La loi LAIGLE est vérifiée par les cas tests suivants:
Bibliographie#
LAIGLE : Aval du cycle – Ouvrages souterrains – Modèles rhéologiques pour l’analyse du comportement mécanique des roches. Note EDF-CIH IH.AVCY.01.003.A (2001).
Ph. KOLMAYER : Aval du cycle – Ouvrages souterrains – Écriture de la loi de comportement du CIH sur une base du modèle Cambou-Jafari-Sidoroff (CJS) connue du Code_Aster . Note EDF-CIH.IH.AVCY.38.005.A (2002).
CHAVANT : Spécifications pour l’introduction d’un modèle de roche dans le Code_Aster . Note EDF-I74/E27131.
CHAVANT, Ph. AUBERT : Loi CJS en géomécanique. Document de Référence du Code_Aster R7.01.13.
Ph. KOLMAYER, R. FERNANDES, C. CHAVANT, 2004 : «Numerical implementation of a new rheological law for argilites”, Applied Clay Science 26, 499-510.
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
7.4 |
R.Fernandes, C.Chavant EDF-R&D/AMA |
Texte initial |
Recalage du critère sur le triaxial en compression
En prenant l’expression générale du critère sous les conditions d’un triaxial en compression, on trouve:
\(f={(\frac{g(s)}{{\sigma}_{c}{h}_{c}^{0}})}^{\frac{1}{a({\gamma}^{p})}}-(-\frac{m({\gamma}^{p})k({\gamma}^{p})}{\sqrt{6}{\sigma}_{c}}\frac{g(s)}{{h}_{c}^{0}}-\frac{m({\gamma}^{p})k({\gamma}^{p})}{3{\sigma}_{c}}{I}_{1}+s({\gamma}_{p}).k({\gamma}^{p}))\) \(={(\frac{\sqrt{\frac{2}{3}}∣{\sigma}_{1}-{\sigma}_{3}∣.h}{{\sigma}_{c}{h}_{c}^{0}})}^{\frac{1}{a({\gamma}^{p})}}+\frac{1}{{\sigma}_{c}}(\frac{m({\gamma}^{p})k({\gamma}^{p})}{{\sigma}_{c}\sqrt{6}}\frac{\sqrt{\frac{2}{3}}∣{\sigma}_{1}-{\sigma}_{3}∣.h}{{\sigma}_{c}{h}_{c}^{0}}+\frac{m({\gamma}^{p})k({\gamma}^{p})}{3{\sigma}_{c}}({\sigma}_{1}+2{\sigma}_{3})-s({\gamma}^{p}).k({\gamma}^{p}))\)
\(={(\frac{\sqrt{\frac{2}{3}}∣{\sigma}_{1}-{\sigma}_{3}∣}{{\sigma}_{c}{h}_{c}^{0}})}^{\frac{1}{a({\gamma}^{p})}}+(\frac{m({\gamma}^{p})k({\gamma}^{p})}{{\sigma}_{c}\sqrt{6}}\sqrt{\frac{2}{3}}∣{\sigma}_{1}-{\sigma}_{3}∣+\frac{m({\gamma}^{p})k({\gamma}^{p})}{3{\sigma}_{c}}({\sigma}_{1}+2{\sigma}_{3})-s({\gamma}^{p}).k({\gamma}^{p}))\)
\(={(\frac{\sqrt{\frac{2}{3}}}{{\sigma}_{c}})}^{\frac{1}{a({\gamma}^{p})}}{(∣{\sigma}_{1}-{\sigma}_{3}∣)}^{\frac{1}{a({\gamma}^{p})}}+(\frac{m({\gamma}^{p}).k({\gamma}^{p})}{3{\sigma}_{c}}∣{\sigma}_{1}-{\sigma}_{3}∣+\frac{m({\gamma}^{p}).k({\gamma}^{p})}{3{\sigma}_{c}}({\sigma}_{1}+2{\sigma}_{3})-s({\gamma}^{p}).k({\gamma}^{p}))\)
\(={(\frac{\sqrt{\frac{2}{3}}}{{\sigma}_{c}})}^{\frac{1}{a({\gamma}^{p})}}{(∣{\sigma}_{1}-{\sigma}_{3}∣)}^{\frac{1}{a({\gamma}^{p})}}+(\frac{m({\gamma}^{p}).k({\gamma}^{p})}{3{\sigma}_{c}}({\sigma}_{3}-{\sigma}_{1})+\frac{m({\gamma}^{p}).k({\gamma}^{p})}{3{\sigma}_{c}}({\sigma}_{1}+2{\sigma}_{3})-s({\gamma}^{p}).k({\gamma}^{p}))\)
\(={(\frac{\sqrt{\frac{2}{3}}}{{\sigma}_{c}})}^{\frac{1}{a({\gamma}^{p})}}{(∣{\sigma}_{1}-{\sigma}_{3}∣)}^{\frac{1}{a({\gamma}^{p})}}+(\frac{m({\gamma}^{p}).k({\gamma}^{p})}{{\sigma}_{c}}({\sigma}_{3})-s({\gamma}^{p}).k({\gamma}^{p}))\)
\(={(\frac{\sqrt{\frac{2}{3}}}{{\sigma}_{c}})}^{\frac{1}{a({\gamma}^{p})}}{(∣{\sigma}_{1}-{\sigma}_{3}∣)}^{\frac{1}{a({\gamma}^{p})}}-{\sqrt{\frac{2}{3}}}^{\frac{1}{a({\gamma}^{p})}}(\frac{m({\gamma}^{p})}{{\sigma}_{c}}(-{\sigma}_{3})+s({\gamma}^{p}))\)
\(={(\frac{\sqrt{\frac{2}{3}}}{{\sigma}_{c}})}^{\frac{1}{a({\gamma}^{p})}}\left[{(∣{\sigma}_{1}-{\sigma}_{3}∣)}^{\frac{1}{a({\gamma}^{p})}}-{({\sigma}_{c})}^{\frac{1}{a({\gamma}^{p})}}(\frac{m({\gamma}^{p})}{{\sigma}_{c}}(-{\sigma}_{3})+s({\gamma}^{p}))\right]\)
Normalisation de Q
\(Q=\frac{1}{{h(\theta )}^{5}}\left[(1+\frac{{\gamma}_{\text{cjs}}}{2}\cos(3\theta ))\frac{s}{{s}_{\text{II}}}+\frac{{\gamma}_{\text{cjs}}\sqrt{54}}{{\mathrm{6.s}}_{\text{II}}^{2}}\text{dev}(\frac{\partial \det(\underline{\underline{s}})}{\partial s})\right]\)
On pose \(t=\frac{\partial \det(\underline{\underline{s}})}{\partial s}\) et \(t=\text{dev}(\frac{\partial \det(\underline{\underline{s}})}{\partial s})\) (cf document de Référence CJS R7.01.13)
\({Q}_{\text{II}}^{2}=\mathrm{Q.}Q=\frac{1}{{h(\theta )}^{10}}\left[{1+\frac{{\gamma}_{\text{cjs}}}{2}\cos(3\theta )}^{2}+\frac{3}{2}.\frac{{{\gamma}_{\text{cjs}}}^{2}}{{{s}_{\text{II}}}_{4}}{t}^{d}.{t}^{d}+\frac{{\gamma}_{\text{cjs}}\sqrt{54}}{{\mathrm{3.s}}_{\text{II}}^{3}}(1+\frac{{\gamma}_{\text{cjs}}}{2}\cos(3\theta ))s.{t}^{d}\right]\)
Pour évaluer cette expression, on se place dans le cas où

est diagonal par soucis de simplification des calculs.
Ainsi: \(\begin{array}{cc}s=& \left[\begin{array}{}{s}_{1}\\ {s}_{2}\\ {s}_{3}\\ 0\\ 0\\ 0\end{array}\right]\end{array}\) et \(\begin{array}{cc}{t}^{d}=\frac{1}{3}& \left[\begin{array}{}{\mathrm{2s}}_{2}{s}_{3}-{s}_{1}{s}_{2}-{s}_{1}{s}_{3}\\ {\mathrm{2s}}_{1}{s}_{3}-{s}_{1}{s}_{2}-{s}_{2}{s}_{3}\\ 2{s}_{1}{s}_{2}-{s}_{1}{s}_{3}-{s}_{2}{s}_{3}\\ 0\\ 0\\ 0\end{array}\right]\end{array}\)
En utilisant la propriété de

: , on \(s={s}_{1}+{s}_{2}+{s}_{3}\) montre que \({s}_{\text{II}}^{4}=({s}_{1}^{2}{s}_{2}^{2}+{s}_{1}^{2}{s}_{3}^{2}+{s}_{2}^{2}{s}_{3}^{2})\) et par conséquent:
\(\begin{array}{cccc}{t}^{\mathrm{d.}}{t}^{d}=\frac{1}{9}& \mid \begin{array}{}{\mathrm{2s}}_{2}{s}_{3}-{s}_{1}{s}_{2}-{s}_{1}{s}_{3}\\ {\mathrm{2s}}_{1}{s}_{3}-{s}_{1}{s}_{2}-{s}_{2}{s}_{3}\\ 2{s}_{1}{s}_{2}-{s}_{1}{s}_{3}-{s}_{2}{s}_{3}\\ 0\\ 0\\ 0\end{array}& \mid \begin{array}{}{\mathrm{2s}}_{2}{s}_{3}-{s}_{1}{s}_{2}-{s}_{1}{s}_{3}\\ {\mathrm{2s}}_{1}{s}_{3}-{s}_{1}{s}_{2}-{s}_{2}{s}_{3}\\ 2{s}_{1}{s}_{2}-{s}_{1}{s}_{3}-{s}_{2}{s}_{3}\\ 0\\ 0\\ 0\end{array}& =\frac{{{s}_{\text{II}}}^{4}}{6}\end{array}\)
On montre également à partir de la propriété \({s}_{1}+{s}_{2}+{s}_{3}=0\) que \({s}_{1}^{3}{s}_{2}^{3}{s}_{3}^{3}={\mathrm{3s}}_{1}{s}_{2}{s}_{3}=3.\det(s)\) et par conséquent:
\(\begin{array}{ccccc}\frac{{\gamma}_{\text{cjs}}.\sqrt{54}}{{\mathrm{3.s}}_{\text{II}}^{3}}\mathrm{s.}{t}^{d}=\frac{{\gamma}_{\text{cjs}}.\sqrt{54}}{{\mathrm{9.s}}_{\text{II}}^{3}}& & \mid \begin{array}{}{s}_{1}\\ {s}_{2}\\ {s}_{3}\\ 0\\ 0\\ 0\end{array}& .\mid \begin{array}{}{\mathrm{2s}}_{2}{s}_{3}-{s}_{1}{s}_{2}-{s}_{1}{s}_{3}\\ {\mathrm{2s}}_{1}{s}_{3}-{s}_{1}{s}_{2}-{s}_{2}{s}_{3}\\ 2{s}_{1}{s}_{2}-{s}_{1}{s}_{3}-{s}_{2}{s}_{3}\\ 0\\ 0\\ 0\end{array}& =\frac{{\gamma}_{\text{cjs}}.\sqrt{54}}{{s}_{\text{II}}^{3}}\det(s)={\gamma}_{s}.\cos(3\theta )\end{array}\)
On en déduit ainsi:
\({Q}_{\text{II}}^{2}=\frac{1}{{h(\theta )}^{10}}\left[{(1+\frac{{\gamma}_{\text{cjs}}}{2}\cos(3\theta ))}^{2}+\frac{{{\gamma}_{\text{cjs}}}^{2}}{4}+{\gamma}_{\text{cjs}}\cos(3\theta )(1+\frac{{\gamma}_{\text{cjs}}}{2}\cos(3\theta ))\right]\)
Encadrement de l’angle de projection
On rappelle que \(\cos{\phi }_{s}\underset{s\to 0}{\to }\frac{3}{(\beta {'}^{2}+3)\sqrt{{(\frac{3}{\beta {'}^{2}+3})}^{2}-\frac{1}{4}+\frac{1}{2(1+{\gamma}_{\text{cjs}}\cos(3\theta ))}+\frac{{\gamma}_{\text{cjs}}^{2}-1}{{4(1+{\gamma}_{\text{cjs}}\cos(3\theta ))}^{2}}}}\)
On pose: \(X(\psi )=\frac{1}{2(1+{\gamma}_{\text{cjs}}\cos(\psi ))}+\frac{{\gamma}_{\text{cjs}}^{2}-1}{{4(1+{\gamma}_{\text{cjs}}\cos(\psi ))}^{2}}\) où \(\psi \in [0,2\pi [\)
On note que: \(X(-\psi )=X(\psi )\) , la fonction

étant paire on restreint l’intervalle d’étude à \(\psi \in [0,2\pi [\) .
La résolution de \(\frac{\mathrm{dX}}{d\psi }=0\) donne \(\frac{{\gamma}_{\text{cjs}}\sin(\psi )}{{2(1+{\gamma}_{\text{cjs}}\cos(\psi ))}^{3}}.{\gamma}_{\text{cjs.}}({\gamma}_{\text{cjs}}+\cos(3\psi ))=0\)
On en déduit que les bornes inférieure et supérieure de la fonction \(X\) sont:
\(\lbrace \begin{array}{}X(\psi =0)=\frac{1}{4}\\ X({\psi}_{\text{cjs}})=\frac{1}{4(1-{\gamma}_{\text{cjs}}^{2})}\text{où}{\psi}_{\text{cjs}}\text{est tel que cos}({\psi}_{\text{cjs}})=-{\gamma}_{\text{cjs}}\end{array}\)
On peut ainsi donner l’encadrement de \(\cos{\phi }_{s}\) suivant: \(\cos{\phi }_{s}^{\min}\le \mathrm{co}{\phi }_{s}\le \cos{\phi }_{s}^{\max}\) avec:
\(\lbrace \begin{array}{}\cos{\phi }_{s}^{\min}=\frac{3}{(\beta {'}^{2}+3)\sqrt{{(\frac{3}{\beta {'}^{2}+3})}^{2}+\frac{{{\gamma}_{\text{cjs}}}^{2}}{4(1-{\gamma}_{\text{cjs}}^{2})}}}\\ \cos{\phi }_{s}^{\max}=1\end{array}\)