v6.04.506 SSNV506 - Indentation élasto-plastique d’un bloc par un indenteur sphérique élastique#
Résumé:
Ce test concerne la modélisation de l’indentation d’une sphère élastique sur un demi-plan au comportement élasto-plastique. L’objectif est de tester les fonctionnalités liées au contact sur un exemple comportant une non‑linéarité matériau.
Solution de référence#
Méthode de calcul utilisée pour la solution de référence#
Les résultats de référence sont issus du livre cité ci-dessous [bib1].
\({p}_{m}=3{\sigma}_{0}\) avec \({p}_{m}\) la pression de contact (page 171).
\(\mathrm{Rjohnson}={p}_{m}a=3{\sigma}_{0}a\) si \(a\) est la surface de contact.
Or en plasticité parfaite \(\delta =0,368{a}^{2}/R\) d’après l’analyse de Richmond (page 200)
Finalement, on obtient:
\(\mathrm{Rjohnson}=3\pi R{\sigma}_{0}\delta /0,368\)
\(\mathrm{Rjohnson}\) : Réaction normale de contact du massif sur la sphère
\(R\) : Rayon de la sphère
\(\delta\) : Déplacement du sommet du massif
\({\sigma}_{0}\) : Limite élastique du massif
Ce résultat est valable sous les hypothèses suivantes :
problème axisymétrique,
matériau parfaitement plastique (le coefficient 0,368 est issue de cette hypothèse)
petites déformations
sphère rigide.
Résultats de référence#
Les résultats de référence sont obtenus à partir de la formule précédente. Elle est valable pour le modèle complet en 3D.
Remarque :
Dans notre étude, Rjohnson dépend uniquement du déplacement, on peut écrire la relation sous la forme suivante grâce aux données du problème : \(\mathrm{Rjohnson}=640270\delta\) avec \(\mathrm{Rjohnson}\) en newton et \(\delta\) en millimètre. \(\delta\) est directement relié à l’instant de calcul.
La valeur de la résultante normale de contact provenant de ASTER est donnée sur un quartier de 1radian d’ouverture en 2D axisymétrique et sur un quartier de \(\pi /2\) pour le modèle 3D (par symétrie, il suffit de modéliser le quart du problème).
Ainsi, les valeurs de référence sont :
en 2D axisymétrique |
: |
\(\mathrm{Rref}=\mathrm{Rjohnson}/2\pi =101902,1\delta\) |
en 3D |
: |
\(\mathrm{Rref}=\mathrm{Rjohnson}/4=160067,5\delta\) |
Incertitudes sur la solution#
Solution analytique.
Référence bibliographique#
« Contact Mechanics » - K. L. JOHNSON - Cambridge University Press - chapitre 6 p.153‑201
Modélisation A#
Caractéristiques de la modélisation#
La symétrie de révolution du problème permet une modélisation axisymétrique: La sphère et le bloc sont représentés respectivement par un demi disque et la coupe de la moitié du bloc, maillés avec des éléments 2D axisymétriques.
Un contact de type nœud-maille est défini entre les deux structures.
Un chargement en déplacement imposé est appliqué à la partie supérieure de la sphère rigidifiée par un module de Young élevé.
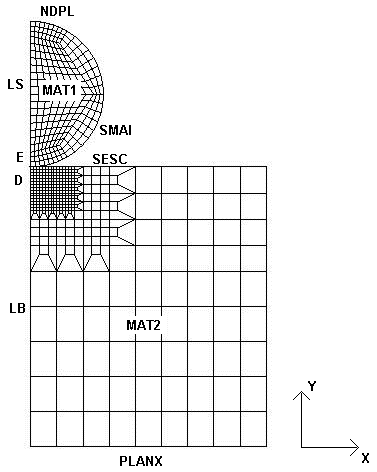
Condition aux limites:
symétrie de révolution: les nœuds situés sur l’axe \(Y\) (groupe de nœuds \(«\mathrm{LB}»\) et \(«\mathrm{LS}»\) ) sont bloqués suivant la direction \(X\) (DX = 0),
encastrement de la base: les nœuds du groupe \(«\mathrm{PLANX}»\) sont bloqués suivant les directions \(X\) et \(Y\) (DX = DY = 0),
les mouvements de corps rigides sont supprimés en imposant une liaison suivant \(y\) entre le nœud \(E\) appartenant à la sphère et le nœud \(D\) appartenant au massif.
Chargements:
Un déplacement imposé est appliqué sur la partie supérieure de la sphère (groupe de nœuds \(«\mathrm{NDPL}»\) ) suivant la direction \(Y\) : Chargement de 0 à \(–100.\mathrm{mm}\)
Caractéristiques du maillage#
Nombre de nœuds : 916
Nombre de mailles et type : 625 QUAD4 et 289 SEG2
Valeurs testées#
Identification |
Déplacement \((\mathrm{mm})\) |
Référence |
Aster |
% tolérance |
Réaction \((N)\) |
20 |
–2.03804E+06 |
–2.06806E+06 |
5 |
Réaction \((N)\) |
40 |
–4.07608E+06 |
–4.04698E+06 |
5 |
Réaction \((N)\) |
60 |
–6.11412E+06 |
–5.82730E+06 |
5 |
Réaction \((N)\) |
80 |
–8.15217E+06 |
–7.66632E+06 |
10 |
Réaction \((N)\) |
100 |
–1.01902E+07 |
–9.11899E+06 |
15 |
Remarques#
L’erreur la plus importante est pour le dernier résultat. Elle reste quand même acceptable.
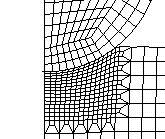
Nous avons illustré la déformation du massif au pas de temps final :
Modélisation B#
Caractéristiques de la modélisation#
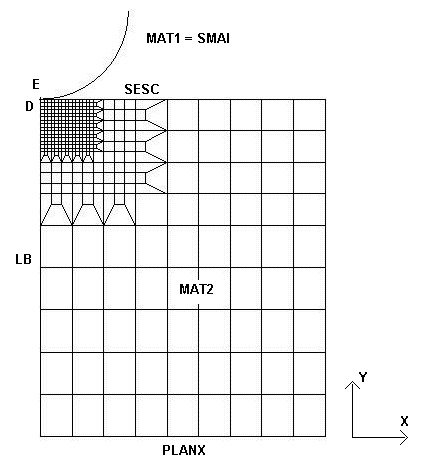
La symétrie de révolution du problème permet une modélisation axisymétrique: Le bloc est représenté par la coupe de sa moitié et la sphère est représentée par sa surface potentiellement en contact, ils sont maillés avec des éléments 2D axisymétriques.
Un contact de type nœud-maille est défini entre les deux structures.
Un chargement en déplacement imposé est appliqué sur toutes les mailles représentant la sphère, rigidifiée par des conditions cinématiques.
Condition aux limites:
|
les nœuds du bâti situés sur l’axe \(Y\) (groupe de nœuds \(«\mathrm{LB}»\) ) sont bloqués suivant la direction \(X\) (DX = 0). |
Tous les nœuds appartenant à la sphère (groupe de nœuds \(«\mathrm{MAT1}»\) ) sont bloqués suivant la direction X (DX = 0). |
|
|
les nœuds de \(«\mathrm{PLANX}»\) sont bloqués suivant les directions \(X\) et \(Y\) (DX = DY = 0). |
Les mouvements de corps rigides sont supprimés en imposant une liaison rigide, suivant \(y\) , entre le nœud \(E\) appartenant à la sphère et le nœud \(D\) appartenant au massif.
Chargements:
Un déplacement imposé est appliqué sur la partie représentant la sphère (groupe de nœud \(«\mathrm{MAT1}»\) ) suivant la direction \(Y\) : Chargement de 0 à \(–100.\mathrm{mm}\)
Caractéristiques du maillage#
Nombre de nœuds : 458
Nombre de mailles et type : 419 QUAD4 et 171 SEG2.
Valeurs testées#
Identification |
Déplacement \((\mathrm{mm})\) |
Référence |
Aster |
% différence |
Réaction \((N)\) |
\(d=-20\mathrm{mm}\) |
–2.06771E+06 |
-2.0677082E+06 |
10 |
Réaction \((N)\) |
\(d=-40\mathrm{mm}\) |
–4.04742E+06 |
-4.0474212E+06 |
10 |
Réaction \((N)\) |
\(d=-60\mathrm{mm}\) |
–5.82779E+06 |
-5.8277879E+06 |
10 |
Réaction \((N)\) |
\(d=-80\mathrm{mm}\) |
–7.66673E+06 |
-7.6667317E+06 |
10 |
Réaction \((N)\) |
\(d=–100\mathrm{mm}\) |
–9.11942E+06 |
-9.1194226E+06 |
15 |
Remarques#
Les résultats sont quasiment identiques à ceux de la modélisation A.
On remarque un temps de calcul réduit en ne modélisant que la surface de contact de la sphère rigidifiée par conditions cinématiques.
Modélisation C#
Caractéristiques de la modélisation#
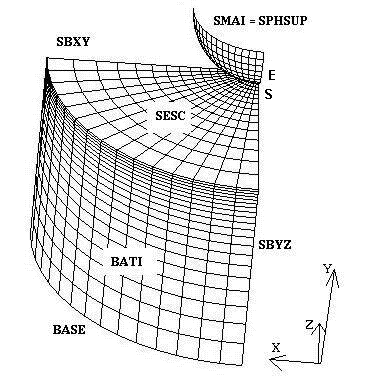
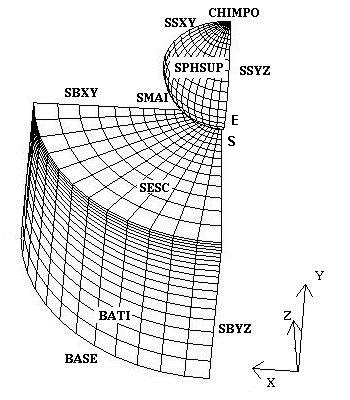
La symétrie du problème permet de ne représenter en 3D qu’un quart du modèle: la sphère et le bloc sont représentés respectivement par la surface de contact de la sphère et un quart de cylindre, maillés avec des éléments solides 3D CUB8 .
Un contact nœud-maille est défini entre la sphère et le bloc.
Un chargement en déplacement imposé est appliqué sur toutes la surface de la sphère rigidifiée par des conditions cinématiques.
Condition aux limites:
|
les nœuds situés dans le plan \((O,y,z)\) (groupe de nœuds \(«\mathrm{SBYZ}»\) ) sont bloqués suivant la direction \(X\) (DX = 0), |
les nœuds situés dans le plan \((O,x,y)\) (groupe de nœuds \(«\mathrm{SBXY}»\) ) sont bloqués suivant la direction \(Z\) (DZ = 0), |
|
les nœuds de la sphère (groupe de nœuds «SPHSUP» ) sont bloqués suivant les directions \(X\) et \(Z\) (DX = DZ = 0) |
|
|
les nœuds du groupe \(«\mathrm{BASE}»\) (plan \(Y=0.\) ) sont bloqués suivant les directions \(X\) , \(Y\) , et \(Z\) (DX = DY = DZ = 0). |
Les mouvements de corps rigides sont supprimés en imposant une liaison suivant y entre le nœud \(E\) appartenant à la sphère et le nœud \(S\) appartenant au massif.
Chargements:
Un déplacement imposé est appliqué à toute la surface représentant la sphère (groupe de nœuds \(«\mathrm{SPHSUP}»\) ) suivant la direction \(Y\) : Chargement de 0 à \(–100.\mathrm{mm}\)
Caractéristiques du maillage#
Nombre de nœuds : 6852
Nombre de mailles et type : 5326 HEXA8, 387 PENTA6 et 183 QUAD4.
Valeurs testées#
Identification |
Déplacements |
Référence |
Aster |
% tolérance |
Réaction \((N)\) |
\(d=–20\mathrm{mm}\) |
–3.201351E+06 |
-3.2100211E+06 |
1 |
Réaction \((N)\) |
\(d=–40\mathrm{mm}\) |
–6.402702E+06 |
-6.1671049E+06 |
5 |
Réaction \((N)\) |
\(d=–60\mathrm{mm}\) |
–9.604053E+06 |
-9.1689400E+06 |
5 |
Réaction \((N)\) |
\(d=–80\mathrm{mm}\) |
–1.280540E+07 |
-1.1738899E+07 |
10 |
Réaction \((N)\) |
\(d=–100\mathrm{mm}\) |
–1.600675E+07 |
-1.4244367E+07 |
12 |
Remarques#
Les résultats sont moins précis que ceux issus des modélisations 2D. Le maillage en 3D fait perdre le caractère exact du cas axisymétrique. De plus, en vue de gains de temps de calcul et d’espace mémoire, le maillage 3D est moins raffiné que celui en 2D.
Modélisation D#
Caractéristiques de la modélisation#
La symétrie du problème permet de ne représenter en 3D qu’un quart du modèle: La sphère et le bloc sont représentés respectivement par un quart de sphère et un quart de cylindre, maillés avec des éléments solides 3D CUB8 .
Un contact nœud-maille est défini entre la sphère et le bloc.
Un chargement en déplacement imposé est appliqué sur la partie supérieure de la sphère rigidifiée par un module d’Young élevé.
Condition aux limites:
|
les nœuds situés dans le plan \((O,y,z)\) (groupes de nœuds \(«\mathrm{SBYZ}»\) et \(«\mathrm{SSYZ}»\) ) sont bloqués suivant la direction \(X\) (DX= 0), |
les nœuds situés dans le plan \((O,x,y)\) (groupes de nœuds \(«\mathrm{SBXY}»\) et \(«\mathrm{SSXY}»\) )sont bloqués suivant la direction \(Z\) (DZ= 0). |
|
|
les nœuds de \(«\mathrm{BASE}»\) (plan \(Y=0.\) ) sont bloqués suivant les directions \(X\) , \(Y\) , et \(Z\) (DX = DY = DZ = 0). |
Les mouvements de corps rigides sont supprimés en imposant une liaison suivant y entre le nœud \(E\) appartenant à la sphère et le nœud \(S\) appartenant au massif.
Chargements:
Un déplacement imposé est appliqué sur la partie supérieure de la sphère (groupe de nœuds \(«\mathrm{CHIMPO}»\) ) suivant la direction \(Y\) : Chargement de 0 à \(–100.\mathrm{mm}\)
Caractéristiques du maillage#
Nombre de nœuds : 6993
Nombre de mailles et type : 5544 HEXA8, 407 PENTA6 et 191 QUAD4
Valeurs testées#
Identification |
Déplacements |
Référence |
Aster |
% tolérance |
Réaction \((N)\) |
\(d=–20\mathrm{mm}\) |
–3.201351E+06 |
-3.82828724E+06 |
25 |
Réaction \((N)\) |
\(d=–40\mathrm{mm}\) |
–6.402702E+06 |
-7.38942843E+06 |
20 |
Réaction \((N)\) |
\(d=–60\mathrm{mm}\) |
–9.604053E+06 |
-1.06420713E+07 |
15 |
Réaction \((N)\) |
\(d=–80\mathrm{mm}\) |
–1.280540E+07 |
-1.28912992E+07 |
10 |
Réaction \((N)\) |
\(d=–100\mathrm{mm}\) |
–1.600675E+07 |
-1.56376456E+07 |
5 |
Remarques#
Les résultats sont quasiment identiques à ceux de la modélisation C. Mais le calcul est encore plus fastidieux car un quart de la sphère est maillé.
Modélisation E#
Caractéristiques de la modélisation#
La symétrie de révolution du problème permet une modélisation axisymétrique: Le bloc est représenté par la coupe de sa moitié et la sphère est représentée par sa surface potentiellement en contact, ils sont maillés avec des éléments 2D axisymétriques.
Un contact de type nœud-maille est défini entre les deux structures.
Un chargement en déplacement imposé est appliqué à la partie supérieure de la sphère rigidifiée par un module de Young élevé.
Condition aux limites:
symétrie de révolution: les nœuds situés sur l’axe \(Y\) (groupe de nœuds \(«\mathrm{LB}»\) et \(«\mathrm{LS}»\) ) sont bloqués suivant la direction \(X\) (DX = 0),
encastrement de la base: les nœuds du groupe \(«\mathrm{PLANX}»\) sont bloqués suivant les directions \(X\) et \(Y\) (DX = DY = 0),
les mouvements de corps rigides sont supprimés en imposant une liaison suivant \(y\) entre le nœud \(E\) appartenant à la sphère et le nœud \(D\) appartenant au massif.
Chargements:
Un déplacement imposé est appliqué sur la partie supérieure de la sphère (groupe de nœuds \(«\mathrm{NDPL}»\) ) suivant la direction \(Y\) : Chargement de 0 à \(–100.\mathrm{mm}\)
Caractéristiques du maillage#
Nombre de nœuds : 688
Nombre de mailles et type : 625 QUAD4 et 241 SEG2.
Valeurs testées#
Identification |
Déplacement \((\mathrm{mm})\) |
Référence |
Aster |
% tolérance |
Réaction \((N)\) |
20 |
–2.03804E+06 |
-2.0892265E+06 |
5 |
Réaction \((N)\) |
40 |
–4.07608E+06 |
-4.0928499E+06 |
5 |
Réaction \((N)\) |
60 |
–6.11412E+06 |
-5.8467590E+06 |
5 |
Réaction \((N)\) |
80 |
–8.15217E+06 |
-7.6820567E+06 |
10 |
Réaction \((N)\) |
100 |
–1.01902E+07 |
-9.1299258E+06 |
15 |
Remarques#
Les résultats sont légèrement meilleurs que ceux de la modélisation A.
On remarque un temps de calcul 5 fois supérieur à cette dernière, utilisant la méthode CONTRAINTE.
Modélisation F#
Caractéristiques de la modélisation#
La symétrie du problème permet de ne représenter en 3D qu’un quart du modèle: la sphère et le bloc sont représentés respectivement par la surface de contact de la sphère et un quart de cylindre, maillés avec des éléments solides 3D CUB8 .
Un contact nœud-maille est défini entre la sphère et le bloc.
Un chargement en déplacement imposé est appliqué sur toutes la surface de la sphère rigidifiée par des conditions cinématiques.
Condition aux limites:
|
les nœuds situés dans le plan \((O,y,z)\) (groupe de nœuds \(«\mathrm{SBYZ}»\) ) sont bloqués suivant la direction \(X\) (DX = 0), |
les nœuds situés dans le plan \((O,x,y)\) (groupe de nœuds \(«\mathrm{SBXY}»\) ) sont bloqués suivant la direction \(Z\) (DZ = 0), |
|
les nœuds de la sphère (groupe de nœuds \(«\mathrm{SPHSUP}»\) ) sont bloqués suivant les directions \(X\) et \(Z\) (DX = DZ = 0) |
|
|
les nœuds du groupe «BASE» (plan \(Y=0.\) ) sont bloqués suivant les directions \(X\) , \(Y\) , et \(Z\) (DX = DY = DZ = 0). |
Les mouvements de corps rigides sont supprimés en imposant une liaison suivant y entre le nœud \(E\) appartenant à la sphère et le nœud \(S\) appartenant au massif.
Chargements:
Un déplacement imposé est appliqué à toute la surface représentant la sphère (groupe de nœuds \(«\mathrm{SPHSUP}»\) ) suivant la direction \(Y\) : Chargement de 0 à \(–100.\mathrm{mm}\)
Caractéristiques du maillage#
Nombre de nœuds : 2236
Nombre de mailles et type : 1638 HEXA8, 126 PENTA6, 725 QUAD4, 27 TRIA3 et 26 SEG2.
Valeurs testées#
Identification |
Déplacements |
Référence |
Aster |
% tolérance |
Réaction \((N)\) |
\(d=–20\mathrm{mm}\) |
–3.201351E+06 |
-3.6477118E+05 |
20 |
Remarques#
Les résultats sont moins précis que ceux issus des modélisations 2D. Le maillage en 3D fait perdre le caractère exact du cas axisymétrique. De plus, en vue de gains de temps de calcul et d’espace mémoire, le maillage 3D est moins raffiné que celui en 2D.
Modélisation G#
Caractéristiques de la modélisation#
La symétrie du problème permet de ne représenter en 3D qu’un quart du modèle: la sphère et le bloc sont représentés respectivement par la surface de contact de la sphère et un quart de cylindre, maillés avec des éléments solides 3D CUB8 .
Un contact nœud-maille est défini entre la sphère et le bloc.
Un chargement en déplacement imposé est appliqué sur toutes la surface de la sphère rigidifiée par des conditions cinématiques.
Condition aux limites:
|
les nœuds situés dans le plan \((O,y,z)\) (groupe de nœuds \(«\mathrm{SBYZ}»\) ) sont bloqués suivant la direction \(X\) (DX = 0), |
les nœuds situés dans le plan \((O,x,y)\) (groupe de nœuds \(«\mathrm{SBXY}»\) ) sont bloqués suivant la direction \(Z\) (DZ = 0), |
|
les nœuds de la sphère (groupe de nœuds \(«\mathit{SMAI}»\) ) sont bloqués suivant les directions \(X\) et \(Z\) (DX = DZ = 0) |
|
|
les nœuds du groupe \(«\mathit{BASE}»\) (plan \(Y=0.\) ) sont bloqués suivant les directions \(X\) , \(Y\) , et \(Z\) (DX = DY = DZ = 0). |
Les mouvements de corps rigides sont supprimés en imposant une liaison suivant y entre le nœud \(E\) appartenant à la sphère et le nœud \(S\) appartenant au massif.
Chargements:
Un déplacement imposé est appliqué à toute la surface représentant la sphère (groupe de nœuds \(«\mathit{SMAI}»\) ) suivant la direction \(Y\) : Chargement de 0 à \(–100.\mathrm{mm}\)
Caractéristiques du maillage#
Nombre de nœuds : 2157
Nombre de mailles et type : 1496 HEXA8, 108 PENTA6, 988 QUAD4, 12 TRIA3 et 8 PYRAM5.
Valeurs testées#
Identification |
Déplacements |
Référence |
Aster |
% tolérance |
Réaction \((N)\) |
\(d=–20\mathrm{mm}\) |
–3.201351E+05 |
-3.6492888E+05 |
20 |
Synthèse des résultats#
Les résultats obtenus sont bons. Cependant, un écart plus important entre la référence et les résultats 3D existe. Il est possible de le combler en raffinant encore plus le maillage mais il faut le payer en place mémoire et en temps de calculs.
La taille des éléments est très importante. S’ils sont trop grands, on peut voir apparaître sur la courbe de la réaction en fonction du déplacement des «vagues» (perte de linéarité de cette courbe). Chaque «vague» correspond à la mise en contact d’un élément. De plus, si le maillage n’est pas suffisamment raffiné, la réaction donnée par Aster s’éloigne sensiblement de celle de référence.
Ne modéliser que la sphère par sa surface de contact rigidifiée par des conditions cinématiques permet un gain de temps.