r5.03.23 Comportement élasto-plastique sous irradiation des métaux : application aux internes de cuve#
Résumé :
Ce document présente l’écriture d’une loi de comportement sous irradiation des aciers inoxydables 304 et 316, matériaux dont sont constituées les structures internes de cuve des réacteurs nucléaires. Le formalisme du modèle est identique pour les deux matériaux, seuls les paramètres sont différents d’un matériau à l’autre. Le modèle prend en compte, outre la thermo-élasticité, la plasticité, le fluage sous irradiation, ainsi qu’un éventuel gonflement sous flux neutronique.
On détaille ici la mise en œuvre du modèle ainsi que ses limites.
Cette loi de comportement, si elle a été développée pour des besoins spécifiques à EDF, peut être utilisée pour rendre compte du comportement de tout matériau présentant des caractéristiques de plasticité, fluage sous irradiation et gonflement.
Formulation de la loi de comportement#
On propose d’employer une décomposition additive des déformations. La déformation mécanique est alors exprimée comme:
\({\underline{\varepsilon}}_{m}={\underline{\varepsilon}}_{e}+{\underline{\varepsilon}}_{p}+{\underline{\varepsilon}}_{i}+{\underline{\varepsilon}}_{g}\) éq 2-1
La déformation mécanique, \({\underline{\varepsilon}}_{m}\) est définie comme la déformation totale moins la déformation thermique: \({\underline{\varepsilon}}_{m}=\underline{\varepsilon}-{\varepsilon}_{\text{th}}\) . Les autres composantes sont: la déformation élastique \({\underline{\varepsilon}}_{e}\) , la déformation plastique \({\underline{\varepsilon}}_{p}\) , la déformation de fluage d’irradiation \({\underline{\varepsilon}}_{i}\) et la déformation de gonflement \({\underline{\varepsilon}}_{g}\) .
La déformation élastique est reliée à la contrainte par la loi de Hooke: \(\underline{\sigma}=\underline{\underline{E}}:{\underline{\varepsilon}}_{e}\) . Le tenseur d’élasticité \(\underline{\underline{E}}\) dépend de la température \(T\) .
La déformation plastique est donnée par une loi de type Von-Misès. La surface d’écoulement est exprimée comme:
\(f={\sigma}_{\text{eq}}-{\sigma}^{f}\) éq 2-2
où \({\sigma}_{\text{eq}}\) est la contrainte de Von-Misès et \({\sigma}^{f}\) la limite d’écoulement. Celle-ci dépend de la déformation plastique cumulée, \(p\) , de la température \(T\) , et de la fluence \(\Phi\) . L’écoulement plastique est donné par la règle de normalité de sorte que:
\({\underline{\dot{\varepsilon}}}_{p}=\dot{p}\underline{n}\) avec \(\underline{n}=\frac{3}{2}\frac{\underline{s}}{{\sigma}_{\text{eq}}}\) éq 2-3
où \(\underline{s}\) est le déviateur des contraintes. \(\dot{p}\) est donnée par la condition de cohérence \(f=0\) et \(\dot{f}=0\) . Les lois de fluage d’irradiation s’expriment (pour un essai à contrainte et flux constants)[ref]:
\(\varepsilon =\max({A}_{i}\cdot \sigma \cdot \Phi -{A}_{0})\) éq 2-4
Le coefficient \({A}_{0}\) traduit un effet de seuil. Sous forme différentielle, la loi précédente peut se réécrire comme:
\(\dot{\varepsilon}={A}_{i}\sigma \cdot \varphi\) si \({\eta}_{i}>{A}_{0}/{A}_{i}\) avec \({\dot{\eta}}_{i}=\sigma \cdot \varphi\) éq 2-5
où \(\varphi\) est le flux (\(\varphi =\dot{\Phi}\) ). On introduit donc une variable d’état supplémentaire, \({\eta}_{i}\) , pour décrire l’effet de seuil. Cette loi uniaxiale doit être étendue au cas multiaxial. Le fluage d’irradiation se faisant sans variation de volume, on décrira ce mécanisme par un modèle viscoplastique fondé sous des équipotentielles données par la contrainte de Von-Misès. On supposera également que l’évolution de la variable \({\eta}_{i}\) est gérée par cette même contrainte. On obtient alors les lois suivantes:
\({\dot{\eta}}_{i}={\zeta}_{f}\cdot \sigma \cdot \varphi\) éq 2-6
\({\dot{p}}_{i}={A}_{i}\cdot \sigma \cdot \varphi\) si \({\eta}_{i}>{\eta}_{i}^{s}\) sinon \({\dot{p}}_{i}=0\) éq 2-7
\({\underline{\dot{\varepsilon}}}_{i}={\dot{p}}_{i}\underline{n}\) éq 2-8
où \({p}_{i}\) est la déformation de fluage d’irradiation équivalente. \({A}_{i}\) et \({\eta}_{i}^{s}\) sont des coefficients du modèle pouvant dépendre de la température (on peut envisager une dépendance vis-à-vis de la fluence mais le modèle sera plus complexe à identifier). La fonction \({\zeta}_{f}\) permet d’introduire une dépendance vis-à-vis de la température dans la loi d’évolution de la variable \({\eta}_{i}\) (voir équation ).On notera que le modèle ainsi formulé pourra fonctionner pour des températures et des flux variables.
Remarque n°1 :
On remarquera que le «fluage» d’irradiation est entièrement piloté par la fluence et non par le temps. Dans le cas où un mécanisme de fluage thermique serait ajouté, le temps jouerait bien entendu un rôle de manière explicite .
Remarque n°2 :
Pour s’assurer du bon franchissement du seuil \({\eta}_{i}^{s}\) ,(d’un point de vue numérique) il est nécessaire de définir un critère d’erreur. Ce critère « TOLER_ET » correspond au % de dépassement du seuil que l’on autorise lors de l’intégration numérique. La déformation de fluage d’irradiation débute dès que le seuil \({\eta}_{i}^{s}\) est franchi, mais on force Code_Aster à respecter une évolution raisonnable de la variable \({\eta}_{i}\) au voisinage du seuil \({\eta}_{i}^{s}\) . Si au cours du calcul le critère n’est pas respecté Code_Aster subdivise les pas de temps, à condition que la subdivision des pas de temps soit autorisée.
Le gonflement peut être décrit par des lois du type:
\(\frac{\Delta V}{{V}_{0}}={F}_{g}(\Phi )\) éq 2-9
où \(\Delta V\) est la variation de volume et \({V}_{0}\) le volume initial. En différenciant cette équation et en supposant que la variation de volume reste faible (\(\Delta V\ll {V}_{0}\) ) on obtient:
\(\frac{\dot{V}}{V}=\frac{{\text{dF}}_{g}}{d\Phi }\varphi\) éq 2-10
Cette vitesse de variation s’identifie à la trace du tenseur des vitesses de gonflement: \(\dot{V}/V=\mathrm{trace}({\underline{\dot{\varepsilon}}}_{g})\) . On suppose ici que le gonflement se fait de manière isotrope et donc que \({\underline{\dot{\varepsilon}}}_{g}\) peut s’exprimer comme:
\({\underline{\dot{\varepsilon}}}_{g}=\dot{g}\underline{1}\) éq 2-11
où \(\underline{1}\) est le tenseur unité. On a donc \(\dot{V}/V=3\dot{g}\)
Soit: \(\dot{g}={A}_{g}\varphi\) éq 2-12
avec \({A}_{g}=\frac{1}{3}{\text{dF}}_{g}/d\Phi\) . \({A}_{g}\) est un nouveau paramètre matériau. Celui-ci dépend de la température et de la fluence. Dans un problème à température variable, il est donc important d’employer l’équation et non l’équation (celle-ci étant implicitement écrite pour une température constante). Un couplage possible entre état de contrainte et gonflement est négligé.
La définition du modèle repose sur cinq variables internes: \(p\) , \({\eta}_{i}\) , \({p}_{i}\) , \(g\) et \({\underline{\varepsilon}}_{e}\) . La température et la fluence sont considérées comme des paramètres imposés pour un calcul donné. Ces valeurs proviennent des calculs de neutronique et de thermique. Les équations du modèle sont rappelées dans le tableau .
Variables internes |
Équations d’évolution |
p |
cohérence \(\dot{p}\) |
\({\eta}_{i}\) |
\({\dot{\eta}}_{i}={\zeta}_{f}\cdot {\sigma}_{\text{eq}}\cdot \varphi\) |
\({p}_{i}\) |
\({\dot{p}}_{i}={A}_{i}\cdot \sigma \cdot \varphi\) si \({\eta}_{i}>{\eta}_{i}^{s}\) sinon \({\dot{p}}_{i}={A}_{i}\cdot \sigma \cdot \varphi {\dot{p}}_{i}=0\) |
g |
\(\dot{g}={A}_{g}\varphi\) |
\({\underline{\varepsilon}}_{e}\) |
\({\underline{\dot{\varepsilon}}}_{e}={\underline{\dot{\varepsilon}}}_{m}-\dot{p}\cdot \underline{n}-{\dot{p}}_{i}\cdot \underline{n}-\dot{g}\cdot \underline{1}\) |
Tableau 2.1: Les équations du modèle.
Implantation : intégration implicite#
L’intégration implicite consiste à trouver les incréments des variables internes \(\Delta {V}_{i}=(\Delta P,\Delta {\eta}_{i},\Delta {P}_{i},\Delta g,\Delta {\underline{\varepsilon}}_{e})\) sur un incrément discret de temps \(\Delta t\) [ref]. La discrétisation des équations du tableau conduit au système d’équations non linéaires suivant:
\({\underline{R}}_{e}=\Delta {\underline{\varepsilon}}_{e}+\Delta p\underline{n}+\Delta {p}_{i}\underline{n}+\Delta g\underline{1}-\Delta {\underline{\varepsilon}}_{m}=0\) |
\({R}_{p}={\sigma}_{\text{eq}}-{\sigma}^{f}=0\) |
\({R}_{\eta}=\Delta {\eta}_{i}-{\zeta}_{f}{\sigma}_{\text{eq}}\Delta \varphi =0\) |
\({R}_{i}=\Delta {P}_{i}-H({\eta}_{i}-{\eta}_{i}^{s}){A}_{i}{\sigma}_{\text{eq}}\Delta \varphi =0\) |
\({R}_{g}=\Delta g-{A}_{g}\Delta \Phi =0\) |
Tableau 3.1: système d’équations discrétisées
Où \(H\) est la fonction de Heavyside et \(\Delta \Phi =\phi \Delta t\) est l’incrément de fluence. En posant \(R=({\underline{R}}_{e},{R}_{p},{R}_{\eta},{R}_{i},{R}_{g})\) , on cherche donc à résoudre le système: \(R(\Delta {V}_{i})=0\) . Les variables internes apparaissant directement ou indirectement (par exemple \({\sigma}_{\text{eq}}\) peut s’exprimer en fonction de \({\underline{\varepsilon}}_{e}\) ) sont exprimées comme: \({\text{v}}_{i}={\text{v}}_{i}^{0}+\theta \Delta {\text{v}}_{i}\) , où \({\text{v}}_{i}^{0}\) représente les valeurs des variables en début d’incrément. \(\theta\) est un paramètre variant entre 0 et 1. Pour \(\theta =0\) , on obtient un schéma explicite d’Euler (à éviter); pour \(\theta =1\) on obtient un schéma totalement implicite.
Le système d’équations du tableau est résolu en employant une méthode de Newton-Raphson qui demande le calcul du Jacobien: \(J=\partial R/\partial \Delta {\text{v}}_{i}\) . Celui-ci peut être calculé bloc par bloc (les termes nuls sont omis). On note \(\underline{\underline{N}}=\partial \underline{n}/\partial \underline{\sigma}\) et \({\sigma}_{,p}^{f}=\partial {\sigma}^{f}/\partial p\) .
Dérivées de \({\underline{R}}_{e}\) :
\(\frac{\partial {\underline{R}}_{e}}{\partial \Delta {\underline{\varepsilon}}_{e}}=\underline{\underline{1}}+\theta \cdot \Delta p\cdot \underline{\underline{N}}:\underline{\underline{E}}+\theta \cdot \Delta {p}_{i}\cdot \underline{\underline{N}}:\underline{\underline{E}}\) \(\frac{\partial {\underline{R}}_{e}}{\partial \Delta p}=\underline{n}\)
\(\frac{\partial {\underline{R}}_{e}}{\partial \Delta {p}_{i}}=\underline{n}\) \(\frac{\partial {\underline{R}}_{e}}{\partial \Delta g}=\underline{1}\)
Dérivées de \({R}_{p}\) :
\(\frac{\partial {R}_{p}}{\partial \Delta {\underline{\varepsilon}}_{e}}=\theta \underline{n}:\underline{\underline{E}}\) \(\frac{\partial {R}_{p}}{\partial \Delta p}=-\theta {\sigma}_{,p}^{f}\)
Dérivées de \({R}_{\eta}\) :
\(\frac{\partial {R}_{\eta}}{\partial \Delta {\underline{\varepsilon}}_{e}}=-{\zeta}_{f}\theta \cdot \Delta \varphi \cdot \underline{n}:\underline{\underline{E}}\) \(\frac{\partial {R}_{\eta}}{\partial \Delta {\eta}_{i}}=1\)
Dérivées de \({R}_{i}\) :
\(\frac{\partial {R}_{i}}{\partial \Delta {\underline{\varepsilon}}_{e}}=-{A}_{i}\cdot \theta \cdot \Delta \varphi \cdot \underline{n}:\underline{\underline{E}}\) \(\frac{\partial {R}_{i}}{\partial \Delta {p}_{i}}=1\)
Dérivées de \({R}_{g}\) :
\(\frac{\partial {R}_{g}}{\partial \Delta g}=1\)
Coefficients matériaux#
Dans la suite, on présente les formes d’évolution des paramètres des équations en fonction des variables de commande que sont la température et la fluence. Les valeurs de ces paramètres pour les matériaux 304 et 316 sont consignées dans le rapport HT-26/05/045/A.
Thermo-élasticité#
Le module d’Young[ref] est donné par:
\(E={C}_{0}^{E}+{C}_{1}^{E}\cdot T\) éq 4.1-1
Le coefficient de Poisson est donné par:
\(\nu ={C}_{0}^{\nu}+{C}_{1}^{\nu}\cdot T\) éq 4.1-2
Le coefficient de dilatation tangent thermique est donné par:
\(\alpha ={C}_{0}^{\alpha}+{C}_{1}\alpha \cdot T+{C}_{2}^{\alpha}\cdot {T}^{2}\) éq 4.1-3
Le coefficient de dilatation sécant est alors donné, en prenant une température de référence nulle, par:
\({\alpha}^{\text{sec}}={C}_{0}^{\alpha}+\frac{1}{2}{C}_{1}^{\alpha}\cdot T+\frac{1}{3}{C}_{2}^{\alpha}\cdot {T}^{2}\) éq 4.1-4
Plasticité#
Cette partie exploite le rapport [ref] pour calculer les courbes d’écrouissage des aciers constitutifs des structures internes de cuve après irradiation pour différentes températures. On utilise les expressions de la limite d’élasticité à 0,2% de déformation plastique \({R}_{0,2}\) , de la contrainte ultime \({R}_{m}\) et de l’allongement réparti \({e}_{u}\) en fonction de la température \(T\) , l’irradiation \(\Phi\) (le rapport [ref] utilise le terme \(d\) pour décrire l’irradiation) et du taux d’écrouissage à froid \(c\) . Le rapport [ref] fournit également l’allongement à rupture mais cette donnée est inexploitable en pratique car elle dépend du type d’éprouvette étudiée.
L’allongement réparti est exprimé comme:
\({e}_{u}={e}_{u}^{0}(T){\eta}_{3}(c){\xi}_{3}(d)\) éq 4.2-1
La limite d’élasticité à 0,2% est exprimée comme:
\({R}_{0,2}={R}_{0,2}^{0}(T){\eta}_{1}(c){\xi}_{1}(d)\) éq 4.2-2
La contrainte ultime n’est pas exprimée directement. La différence \(\Delta R={R}_{m}-{R}_{0,2}\) est tout d’abord représentée par une fonction:
\(\Delta R=({R}_{m}^{0}(T)-{R}_{0,2}^{0}(T)){\eta}_{2}(c){\xi}_{2}(d)\) éq 4.2-3
Ajuster \(\Delta R\) au lieu de \({R}_{m}\) permet d’assurer que: \({R}_{m}>{R}_{0,2}\) . \({R}_{m}\) est donc obtenu comme: \({R}_{m}(T,c,d)={R}_{0,2}(T,c,d)+\Delta R(T,c,d)\)
Notons que les fonctions \({e}_{u}^{0}\) , \({R}_{0,2}^{0}\) et \({R}_{m}^{0}\) sont valables pour les deux matériaux (304 et 316) constitutifs des internes de cuve. Les fonctions \({\eta}_{1,2,3}\) et \({\xi}_{1,2,3}\) dépendent du matériau. On propose de représenter la courbe d’écrouissage des matériaux pour des valeurs de \(T\) , \(d\) et \(c\) données par une loi puissance du type:
\({\sigma}_{f}(p)=K{(p+{p}_{0})}^{n}\) éq 4.2-4
où \(p\) est la déformation plastique équivalente de Von-Misès. \(K\) , \({p}_{0}\) et n sont des paramètres à calculer afin d’obtenir les valeurs de \({R}_{0,2}^{0}\) , \({R}_{m}\) et \({e}_{u}\) .
La valeur de la déformation correspondant à l’allongement réparti (notée \({\varepsilon}_{u}=\log(1+{e}_{u})\) ) est obtenue par la condition de Considère (en négligeant la déformation élastique):
\(\frac{d{\sigma}^{f}}{\text{dp}}={\sigma}^{f}\) éq 4.2-5
soit:
\(nK{(p+{p}_{0})}^{n-1}=K{(p+{p}_{0})}^{n}\Rightarrow {p}^{0}=n-{\varepsilon}_{u}\) éq 4.2-6
La contrainte ultime est égale à:
\({R}_{m}={\sigma}^{f}({\varepsilon}_{u})\exp(-{\varepsilon}_{u})=K{n}^{n}\exp(-{\varepsilon}_{u})\) éq 4.2-7
Soit:
\(K=\frac{{R}_{m}}{{n}^{n}}\exp({\varepsilon}_{u})\) éq 4.2-8
La limite d’élasticité est donnée par (on néglige ici la variation de section):
\({R}_{0,2}=K{({p}_{e}+{p}_{0})}^{n}\) avec \({p}_{e}=0,002\) éq 4.2-9
Il reste donc à résoudre une unique équation non linéaire par rapport à n :
\(S={R}_{0,2}-\frac{{R}_{m}}{{n}^{n}}\exp({\varepsilon}_{u}){({p}_{e}+n-{\varepsilon}_{u})}^{n}=0\) éq 4.2-10
La recherche de la solution est faite par dichotomie en prenant \({\varepsilon}_{u}\) pour valeur initiale de \(n\) . On calcule ensuite \(n\) et \(K\) en utilisant les équations et .
Dans le cas où le matériau présente peu d’écrouissage (i.e. forte irradiation ou écrouissage à froid très important), il n’est pas possible de trouver une solution à l’équation . Dans ce cas on utilisera la loi puissance de la forme \({\sigma}^{f}(p)=K{p}^{n}\) avec \(n={\varepsilon}_{u}\) et \({\sigma}^{f}(p)=K{p}^{\mathrm{nK}}={R}_{m}\exp({\varepsilon}_{u})/{n}^{n}\) soit \({p}_{0}=0\) .
L’emploi des lois précédentes pour les faibles valeurs de p peut conduire à des résultats peu réalistes. On pourra considérer que la contrainte d’écoulement ne peut être inférieure à \(\kappa {R}_{0,2}\) (avec \(\kappa\) proche de 1). L’effet du choix de \(\kappa\) sur la réponse en fluage d’une structure est négligeable pour des valeurs comprises entre 0,8 et 1. On recommande, pour un calcul dans Code_Aster, de retenir la valeur \(\kappa =0,8\) . On utilisera en outre une extrapolation linéaire entre \(p=0\) et \(p={p}_{e}\) obtenue à partir des valeurs en \({p}_{e}\) de la contrainte et de l’écrouissage. La figure indique de manière schématique l’allure de la loi d’écrouissage proposée.
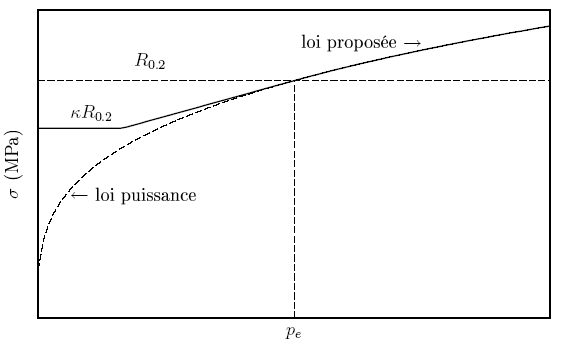
Figure 4.2-1: Loi d’écrouissage proposée .
Fluage d’irradiation#
Les données de fluage d’irradiation collectées dans [ref] permettent de déterminer les valeurs de \({A}_{i}\) et \({\eta}_{i}^{s}\) . Ces valeurs sont a priori constantes avec la température. Il est toutefois probable qu’à basse température, il n’y ait pas de fluage d’irradiation. Pour modéliser cette évolution, il est possible de faire dépendre le coefficient \({A}_{i}\) de la température:
\({A}_{i}={A}_{i}^{0}{\zeta}_{f}(T)\) éq 4.3-1
où \({A}_{0}^{i}\) est la valeur du paramètre pour les hautes températures. Dans cette équation \({\zeta}_{f}\) est une fonction qui peut permettre de stopper le phénomène de fluage en dessous d’un seuil de température. Elle peut s’écrire sous la forme \({\zeta}_{f}(T)=\frac{1}{2}(1+\tanh({\mu}_{T}(T-{T}_{c})))\) , où \({T}_{c}\) permet de régler la température pour laquelle le fluage d’irradiation débute et où \({\mu}_{T}\) permet de régler la largeur de la transition entre les domaines de température avec et sans fluage d’irradiation.
Gonflement#
On utilisera une loi de Foster bilinéaire qui permet de représenter un temps d’incubation puis un gonflement linéaire[ref,ref]. On a alors:
\(\frac{\Delta V}{{V}_{0}}={F}_{g}(\Phi )=R\cdot (\Phi +\frac{1}{\alpha}\text{Log}(\frac{1+\exp(\alpha ({\Phi}_{0}-\Phi ))}{1+\exp(\alpha {\Phi}_{0})}))\) éq 4.4-1
Pour \(\Phi \to \infty\) on obtient:
\(\frac{\Delta V}{{V}_{0}}=R\cdot \Phi -\frac{R}{\alpha}\text{Log}(1+\exp(\alpha {\Phi}_{0}))\) éq 4.4-2
La fluence d’incubation vaut donc: \(\text{Log}(1+\exp(\alpha {\Phi}_{0}))/\alpha\) (n.b.: si \(\alpha {\Phi}_{0}\gg 1\) celle-ci vaut \({\Phi}_{0}\) ). En dérivant l’équation on obtient:
\({A}_{g}=\frac{1}{3}R(1-\frac{\exp(\alpha ({\Phi}_{0}-\Phi ))}{1+\exp(\alpha ({\Phi}_{0}-\Phi ))})\) éq 4.4-3
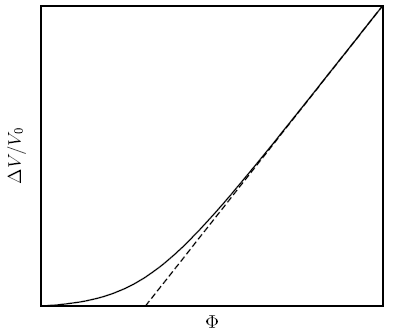
Figure 4.4-1: Loi bilinéaire de Foster [ref].
Les paramètres matériau de la loi de gonflement sont donc R, \(\alpha\) , et \({\Phi}_{0}\) .
Comme dans le cas du fluage d’irradiation, il peut être nécessaire d’introduire une dépendance vis-à-vis de la température pour ne pas imposer un gonflement à basse température. On pourra faire dépendre \(R\) de la température en utilisant une fonction \({\zeta}_{g}\) analogue à celle employée pour le fluage d’irradiation:
\(R={R}^{0}{\zeta}_{g}(T)\) avec \({\zeta}_{g}(T)=\frac{1}{2}(1+\tanh({\mu}_{g}(T-{T}_{c}^{g})))\) éq 4.4-4
Les limites du modèle#
Le modèle proposé a été établi à partir d’une base expérimentale dans laquelle les essais sont réalisés pour des sollicitations monotones: (i) essais de traction sur matériaux pré-irradiés en condition isotherme; essais de fluage d’irradiation (et de gonflement) en condition isotherme pour un flux constant. Cette loi doit cependant être employée pour simuler le comportement des internes de cuve en conditions réelles; c’est-à-dire avec des flux et des températures variables.
Le cyclage thermique induit un chargement mécanique cyclique. Les équations du modèle, écrites sous forme différentielle, permettent de gérer les températures et flux variables mais certains effets physiques ne sont pas pris en compte. C’est par exemple le cas de l’écrouissage cinématique qui pourrait intervenir lors d’un cyclage thermique. Il n’existe pas, à notre connaissance, d’essais de traction/compression cycliques sur matériaux irradiés. D’autres questions peuvent également se poser: (i) quel est le comportement en fluage d’irradiation d’un matériau pré-irradié (à une température différente et/ou sous contrainte)? (ii) existe-t-il un couplage entre fluage d’irradiation et plasticité?
Le gonflement est traité comme une déformation volumique irréversible. Il s’agit cependant de l’apparition de cavités qui peuvent croître sous contrainte de traction (voire se combler sous contrainte de compression mais cela reste très hypothétique). Cet effet nocif, puisque le taux de vide augmente plus vite, n’est cependant pas pris en compte.
Le domaine d’utilisation du modèle en température, fluence et contrainte de fluage est précisé dans la note HT-26/05/045/A pour les matériaux 304 et 316. Toutefois, il est possible d’utiliser un tel modèle dans le cadre d’un calcul avec Code_Aster pour tout autre matériau que ceux-ci. Dans ce cas, il est de la responsabilité de l’utilisateur du code de s’assurer que les coefficients matériau qu’il utilise sont en accord avec le domaine de validité de son calcul.
Application du modèle dans Code_Aster#
La définition du modèle dans un fichier de données de Code_Aster se fait de la manière suivante:
ACIER=DEFI_MATERIAU(
ELAS_FO= _F(
E = fonction(T)
NU = fonction(T),
ALPHA = fonction(T),
TEMP_DEF_ALPHA = réel,
),
IRRAD3M= _F(
R02 = fonction(T,dpa) (cf eq )
EPSI_U = fonction(T,dpa) (cf eq )
RM = fonction(T,dpa) (cf eq )
AI0 = réel (eq )
ZETA_F = fonction(T) (cf eq , )
ETAI_S = réel (cf eq )
RG0 = fonction(T) (cf eq )
ALPHA = réel (cf eq )
PHI0 = réel (cf eq )
KAPPA = réel (cf figure )
ZETA_G = fonction(T) (cf eq )
TOLER_ET = réel (cf remarque 2 §2)
),
)
Les variables internes sont les suivantes :
V1 : p
V2 : \({\eta}_{i}\)
V3 : \({p}_{i}\)
V4 : g
V5 : indicateur de plastification (0 si pas de plastification, 1 si plastifié)
V6 : Irradiation
V7 : Température
Bibliographie#
[1] J.P. Massoud, Durée de vie des internes irradiés de cuve. Dossier de synthèse: Matériaux irradiés (HT-27/04/045/A), EDF R&D (2005).
[2] J. Besson, G. Cailletaud, J.L. Chaboche, S. Forest, Mécanique non-linéaire des matériaux, Hermes, 2001.
[3] Materials Reliability Program Development of Material Constitutive Model for Irradiated Austenitic Stainless Steels (MRP – 135), EPRI, Palo Alto, CA:2004. 1011127.
[4] J.P. Foster, R.V. Strain, Empirical swelling equations for solution-annealed type 304 stainless steel, Nuclear Technology (1974) 93-98.
[5] J. Besson, S.Leclercq, Loi de comportement pour les aciers A304 et A316 des internes de cuve sous irradiation, Note EDF/R&D-HT-26/05/045/A, 2005.
Historique des versions du document#
Version Aster |
Auteur(s) ou contributeur(s) organisme(s) |
Description des modifications |
8.4 |
S.LECLERCQ, J.BESSON EDF/R&D/MMC, ENSMP-CdM |
Texte initial, formulation de la loi IRRAD3M |
9.1 |
J.L. FLEJOU EDF/R&D/AMA |
Amélioration de l’intégration numérique des lois: analytique pour le gonflement, et critère de franchissement du seuil pour le fluage. |
10.0 |
J.L. FLEJOU EDF/R&D/AMA |
Modification de la loi pour le calcul de la sensibilité à l’IASCC. |