r3.08.03 Calcul des caractéristiques d’une poutre de section transversale quelconque#
Résumé:
On présente le principe du calcul des différentes grandeurs caractéristiques des sections de poutres. Celles-ci sont établies à partir des caractéristiques géométriques de la section transversale de la poutre.
Ces valeurs sont à fournir à l’opérande SECTION:’GENERALE’ de l’opérateur AFFE_CARA_ELEM [U4.42.01]. Pour les déterminer, des méthodes numériques sont présentées, et mises en œuvre dans la commande MACR_CARA_POUTRE.
Dans le cas des sections ’RECTANGLE’ et ’CERCLE’, on calcule directement dans AFFE_CARA_ELEM les caractéristiques à l’aide de formules simplifiées que l’on explicite ici.
Les coefficients de cisaillement et le centre de cisaillement#
Il s’agit d’évaluer les coefficients \({A}_{y}=\frac{1}{{k}_{y}},{A}_{z}=\frac{1}{{k}_{z}}\) intervenant dans les modèles de poutres de Timoshenko avec prise en compte des déformations de cisaillement. Pour les poutres d’EULER, ces coefficients n’interviennent pas [U4.42.01 §7.4.2] et [R3.08.01 §2.3.1]. Ces coefficients sont obtenus pour un comportement élastique linéaire.
Dans le cas des sections quelconques, les coefficients de cisaillement sont à fournir par l’utilisateur dans AFFE_CARA_ELEM, si l’élément choisi est une poutre de TIMOSHENKO (modèles POU_D_T, POU_D_TG et POU_D_TGM).
Dans le cas des sections circulaires ou rectangulaires, les coefficients de cisaillement sont calculés par des méthodes analytiques du [§2.1].
Dans tous les cas, ils peuvent être calculés par MACR_CARA_POUTRE, à partir du maillage plan de la section. La méthode numérique utilisée est exposée au [§2.3]. Cette méthode s’applique à des sections quelconques (de matériau homogène et isotrope). En annexe 2, on décrit une extension de cette méthode au cas d’un réseau de poutres parallèles maintenues entre deux planchers rigides.
La position du centre de torsion (ou centre de cisaillement) ne s’obtient que par des méthodes numériques (cf. [§2.3]). Pour les sections rectangulaires et circulaires, comme pour toutes les sections à 2 plans de symétrie, le centre de torsion est confondu avec le centre de gravité de la section.
Méthodes analytiques#
On décrit trois méthodes analytiques permettant de calculer des coefficients de cisaillement, applicables aux sections quelconques.
Les deux premières méthodes diffèrent par la définition qu’elles proposent du coefficient de cisaillement, mais reposent sur une même hypothèse qui consiste à postuler la forme de la répartition des contraintes de cisaillement dans la section.
Hypothèse de répartition des cisaillements : formule de JOURAWSKI#
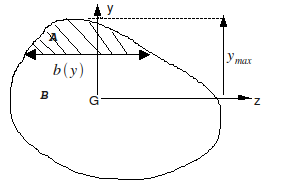
Considérons par exemple le cas d’une poutre de section droite \(S\) , soumise à un effort tranchant \({V}_{y}={\int}_{s}{\sigma}_{xy}\mathrm{dS}\) . On écrit l’équilibre d’une partie prismatique de la poutre, comprise entre les sections droites \({S}_{x}\) et \({S}_{x+a}\) et entre le plan de coupe situé à l’ordonnée \(y\) et \({y}_{\max}\) (réf.[bib]). Les efforts agissant sur cette partie de poutre sont les vecteurs contraintes sur les faces \({S}_{x}\) et \({S}_{x+a}\) , et ceux agissant sur la face située en \(y\) .

Figure 6 : Section de poutre.
En appliquant le théorème de la résultante, on obtient:
\(\begin{array}{cc}{\int}_{{S}_{x+a}}{\sigma}_{xx}(x,y',z)\mathrm{dy}'\text{dz}-{\int}_{{S}_{x}}{\sigma}_{xx}(x,y',z)\mathrm{dy}'\text{dz}& =N(x+a,y)-N(x,y)\\ & ={\int}_{x}^{x+a}{\int}_{\frac{-b(y)}{2}}^{\frac{b(y)}{2}}{\sigma}_{xy}(\alpha ,y,z)d\alpha \text{dz}\end{array}\)
Pour évaluer le terme de droite, JOURAWSKI a proposé de ne considérer que la moyenne des cisaillements suivant z:
\({\stackrel{ˉ}{\sigma}}_{xy}(x,y)=\frac{1}{b(y)}{\int}_{-\frac{b}{2}}^{\frac{b}{2}}{\sigma}_{xy}(x,y,z)\text{dz}\)
alors
\({\int}_{x}^{x+a}{\int}_{-\frac{b(y)}{2}}^{\frac{b(y)}{2}}{\sigma}_{xy}(\alpha ,y,z)d\alpha \text{dz}={\int}_{x}^{x+a}b(y){\stackrel{ˉ}{\sigma}}_{xy}(\alpha ,y)d\alpha\)
et en faisant tendre \(a\) vers \(0\) ,
\(\frac{\partial N}{\partial x}=b(y){\stackrel{ˉ}{\sigma}}_{xy}(x,y)\)
Les équations d’équilibre de poutre et la répartition des contraintes de flexion (en élasticité) donnent:
\(N(x,y)={\int}_{{S}_{x}}^{}{\sigma}_{xx}(x,y,z)\text{dydz}={\int}_{{S}_{x}}^{}\frac{{M}_{z}(x).y}{{I}_{z}}\text{dydz}\)
\(=\frac{{M}_{z}(x)}{{I}_{z}}m(y)\text{avec}m(y)={\int}_{y}^{{y}_{\max}}t\text{}b(t)\text{}\text{dt}\)
donc
\({\stackrel{ˉ}{\sigma}}_{xy}(\text{x,y})=\frac{m(y)}{{I}_{z}b(y)}\frac{\partial {M}_{z}}{\partial x}=\frac{m(y)}{{I}_{z}b(y)}{V}_{y}\)
La répartition des cisaillements suivant \(y\) est donc donnée par la formule de JOURAWSKI:
\({\stackrel{ˉ}{\sigma}}_{xy}(\text{x,y})=\frac{m(y)}{{I}_{z}b(y)}{V}_{y}\text{avec}m(y)={\int}_{y}^{{y}_{\max}}t\text{}b(t)\text{}\text{dt}\) [1]
conformément à [U4.24.01], avec les notations de la [Figure]. La quantité \(m(y)\) représente le moment statique de la part de section (hachurée) comprise entre \(y\) et \({y}_{\max}\) :
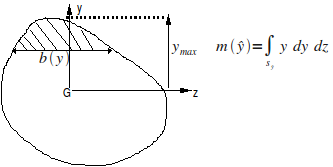
Figure 7 : section de poutre
Cette répartition vérifie bien les conditions aux limites suivant \(y\) du problème tridimensionnel: le cisaillement est bien nul sur les fibres inférieure et supérieure (\(y={y}_{\min}\) , ou \(y={y}_{\max}\) ). Mais elle ne tient compte que de la moyenne des cisaillements suivant \(z\) .
En appliquant cette formule à une section rectangulaire pleine, on trouve une répartition parabolique suivant \(y\) . En l’appliquant à une poutre de section circulaire, on trouve une répartition parabolique en y et en \(z\) , qui varie plus lentement suivant \(z\) que suivant \(y\) .
Ceci reste valable pour les autres sections pleines. Pour des sections comportant des trous, il faut prendre garde de ne considérer que la matière dans le calcul de \(b(y)\) .
Méthode de TIMOSHENKO#
A l’origine, TIMOSHENKO (réf. [bib]) a proposé une définition simple du coefficient de cisaillement, comme étant le rapport entre la contrainte de cisaillement transverse moyenne dans la section notée \({\stackrel{ˉ}{\sigma}}_{\text{CT}}\) et sa valeur maximale \(({\sigma}_{{\mathrm{CT}}_{\mathrm{Max}}})\) . Du fait que nous avons toujours l’effort tranchant par:
\(V={\int}_{s}{\sigma}_{\text{CT}}\text{dS}\) [2]
nous déduisons:
. \({\stackrel{ˉ}{\sigma}}_{\text{CT}}=\frac{V}{S}\)
Sachant que TIMOSHENKO propose d’écrire:
\(k=\frac{{\stackrel{ˉ}{\sigma}}_{\text{CT}}}{{\sigma}_{{\text{CT}}_{\text{Max}}}}\) [3]
pour déterminer \(k\) , il suffit d’exprimer l’effort tranchant \(V={\int}_{s}{\sigma}_{\text{CT}}\text{dS}\) [éq] en fonction de \({\sigma}_{{\mathrm{CT}}_{\mathrm{Max}}}\) . Dans le cas général des sections quelconques, il y aura naturellement deux coefficients \({k}_{y}\) et \({k}_{z}\) , pour chacun des deux axes principaux.
Il reste à déterminer \({\sigma}_{{\mathrm{CT}}_{\mathrm{Max}}}\) . Pour cela, TIMOSHENKO fait une hypothèse sur la répartition des contraintes de cisaillement transverse: la contrainte de cisaillement transverse a une distribution parabolique dans la direction de l’effort tranchant qui la produit, avec sa valeur maximale au centre et des valeurs nulles aux bords. Ceci est vrai suivant la formule de JOURAWSKI pour une section rectangulaire. Par extension, la méthode étend cette hypothèse de répartition parabolique à une section quelconque
Cette méthode n’est pas appliquée dans Code_Aster , sauf pour les sections rectangulaires creuses. On utilise la méthode “énergétique” dans les autres cas.
Méthode « énergétique »#
En réalité, la définition proposée par TIMOSHENKO s’avère peu utilisée en pratique aujourd’hui ; on lui préfère une formulation basée sur l’énergie interne due au cisaillement dans la section. Celle-ci s’écrit:
\({U}_{\text{CT}}={\int}_{s}\frac{1}{2}\frac{{\sigma}_{{\text{CT}}^{2}}}{G}\text{dS}\)
où \(G\) est le module de cisaillement (égal à \(m\) ).
La nouvelle définition du coefficient de cisaillement est parfois attribuée à MINDLIN et s’exprime par:
\({U}_{\text{CT}}=\frac{1}{2}\frac{{V}^{2}}{k\text{SG}}\) [4]
De ce fait, par substitution, on définit ainsi pour une section de matériau homogène le coefficient de cisaillement par:
\(k={\frac{\left[{\int}_{s}{\sigma}_{\text{CT}}\text{dS}\right]}{S{\int}_{s}{\sigma}_{{\text{CT}}^{2}}\text{dS}}}^{2}=\frac{{V}^{2}}{S{\int}_{s}{\sigma}_{{\text{CT}}^{2}}\text{dS}}\) [5]
En faisant une hypothèse sur la répartition de contrainte dans la section, on peut ainsi estimer la valeur de \(k\) . A partir de la formule de JOURAWSKI [éq], l’expression précédente peut s’écrire [bib]:
\(k=\frac{{I}^{2}}{S{\int}_{S}^{}\frac{{m}^{2}(y)}{{b}^{2}(y)}\text{dS}}\) [6]
Méthode de COWPER#
On peut aussi prendre en compte les effets tridimensionnels pour déterminer le coefficient \(k\) ; différentes formulations ont été proposées, en particulier par COWPER [bib] et reprises par BLEVINS [bib], en se fondant sur la résolution du problème tridimensionnel de Saint-Venant.
Dans ce cas, le coefficient \(k\) est une fonction du coefficient de POISSON, en général une approximation au premier ordre. COWPER utilise les équations tridimensionnelles de l’élasticité dans le cas dynamique pour proposer une expression de \(k\) donnant de bons résultats en statique et en dynamique à basse fréquence. L’approximation qui permet d’aboutir à la formule proposée consiste à considérer une répartition de contrainte non pas parabolique, mais résultant du problème statique (résolu analytiquement) de la poutre cantilever chargée transversalement à son extrémité libre. Il est à noter que la répartition obtenue est strictement identique au problème avec un chargement transverse uniformément réparti.
Cas particulier des sections rectangulaire et circulaire#
On distingue les poutres pleines et les tubes.
Pour la section rectangulaire pleine, le coefficient de cisaillement est déterminé par la méthode basée sur l’énergie interne de cisaillement avec répartition parabolique des contraintes:
\({k}_{y}=\frac{{I}_{z}^{2}}{S{\int}_{S}^{}\frac{{m}_{z}^{2}(y)}{{b}_{{}_{z}}^{2}(y)}\text{dy}}\) [7]
Appliqué à la section rectangulaire, on obtient \({k}_{y}={k}_{z}=\frac{5}{6}\) . A noter que cette valeur correspond également à la méthode de COWPER lorsque le coefficient de POISSON est pris égal à zéro.
Pour le tube rectangulaire, Code_Aster utilise la méthode de TIMOSHENKO qui conduit à \({k}_{y}={k}_{z}=\frac{2}{3}\) . Dans le cas des poutres à section circulaire pleine, on utilise la méthode énergétique qui conduit à \({k}_{y}={k}_{z}=\frac{9}{10}\) . Cette valeur est également obtenue par la méthode de COWPER lorsque le coefficient de POISSON est égal à \(\frac{1}{2}\) .
Pour les tubes circulaires, on distingue les tubes à paroi fine et ceux à paroi épaisse. Si l’on note \(m=\frac{{r}_{i}}{{r}_{e}}\) le rapport du rayon interne au rayon externe, un tube est à paroi fine lorsque \(m>0.9\) , sinon il est à paroi épaisse.
Le coefficient de cisaillement du tube circulaire à paroi fine est donné par la méthode de COWPER, en considérant que \(m=1\) et pour un coefficient de POISSON nul, soit \({k}_{y}={k}_{z}=\frac{1}{2}\) .
Pour les tubes circulaires à paroi épaisse, on utilise une formule approchée de la méthode de COWPER qui s’écrit: \(k=\frac{1}{1,093+0,634m+1,156{m}^{2}-0,905{m}^{3}}\)
Remarquons que cette formule n’assure pas la continuité avec les cas limites du cylindre plein (\(m=0\) ) et du cylindre à paroi infiniment mince (\(m=1\) ).
Si les choix précédents (effectués par AFFE_CARA_ELEM dans le cas des sections circulaires et rectangulaires) ne conviennent pas, il est toujours possible de calculer numériquement les coefficients de cisaillement à l’aide de MACR_CARA_POUTRE, dont la méthode est précisée dans le § suivant.
Méthode numérique de calcul des coefficients de cisaillement et du centre de cisaillement#
Calcul des coefficients de cisaillement :#
Cette méthode s’inspire de [bib], page 62. Elle permet la détermination simultanée des constantes de cisaillement et du centre de torsion. Elle est mise en œuvre dans MACR_CARA_POUTRE, à partir d’un maillage plan de la section. Elle ne fonctionne actuellement que pour des sections homogènes et isotropes (pour des sections non homogènes, la méthode est similaire [bib] mais non disponible dans Code_Aster ).
Comme pour la méthode énergétique, on compare pour un effort tranchant \(V\) l’énergie interne \({U}_{1}\) due au cisaillement dans la section avec l’énergie U2associée au modèle de MINDLIN:
\({U}_{1}={\int}_{s}\frac{1}{2}\frac{{\sigma}_{xy}^{2}+{\sigma}_{xz}^{2}}{G}\text{dS}={U}_{2}=\frac{1}{2}\frac{{V}_{z}^{2}}{{k}_{z}\text{SG}}\)
Le coefficient de cisaillement s’exprime par: \({k}_{z}=\frac{1}{2}\frac{{V}_{z}^{2}}{{\text{SGU}}_{1}}\)
Il faut donc calculer \({U}_{1}\) et donc les contraintes de cisaillement (en élasticité) dans la section pour estimer la valeur de \(k\) .On se place dans le repère principal d’inertie \((G,y,z)\) , et on suppose que la poutre n’est soumise qu’à un effort tranchant \({V}_{z}\) . Il en résulte que:
\(\begin{array}{}{\sigma}_{xx}=z\frac{{M}_{y}(x)}{{I}_{y}}\\ \frac{\partial {\sigma}_{xx}}{\partial x}=z\frac{{V}_{z}}{{I}_{y}}\end{array}\)
Les équations d’équilibre permettent d’écrire:
\(\frac{\partial {\sigma}_{xx}}{\partial x}+\frac{\partial {\sigma}_{xy}}{\partial y}+\frac{\partial {\sigma}_{xz}}{\partial z}=0=\frac{\partial {\sigma}_{xy}}{\partial y}+\frac{\partial {\sigma}_{xz}}{\partial z}+z\frac{{V}_{z}}{{I}_{y}}\)
D’autre part, la cinématique de la poutre en flexion/cisaillement est:
\(\begin{array}{}u(x,y,z)=u(x)+z{\theta}_{y}(x)+\tilde{u}(y,z)\\ v(x,y,z)=0\\ w(x,y,z)=w(x)\end{array}\)
\(\tilde{u}(y,z)\) représentant le déplacement axial dû au gauchissement de la section. Les déformations s’écrivent:
\(\begin{array}{}{\varepsilon}_{xx}=\frac{\partial u(x)}{\partial x}+z\frac{\partial {\theta}_{y}(x)}{\partial x}\\ 2{\varepsilon}_{xy}=\frac{\partial \tilde{u}(y,z)}{\partial y}\\ 2{\varepsilon}_{xz}={\theta}_{y}(x)+\frac{\partial \tilde{u}(y,z)}{\partial z}+\frac{\partial w(x)}{\partial x}\end{array}\)
En utilisant la relation de comportement de l’élasticité linéaire, les contraintes s’écrivent:
\(\begin{array}{}{\sigma}_{xy}=2\mu {\varepsilon}_{xy}=\mu \frac{\partial \tilde{u}(y,z)}{\partial y}\\ {\sigma}_{xz}=2\mu {\varepsilon}_{xz}=\mu ({\theta}_{y}(x)+\frac{\partial \tilde{u}(y,z)}{\partial z}+\frac{\partial w(x)}{\partial x})\end{array}\)
Les composantes de cisaillement vérifient donc:
\(\frac{\partial {\sigma}_{xy}}{\partial z}-\frac{\partial {\sigma}_{xz}}{\partial y}=0\)
Cette relation permet d’introduire la fonction de contraintes \({\psi}_{z}\) telle que les contraintes de cisaillement dans la section s’écrivent:
\(\begin{array}{}{\sigma}_{xy}=\mu \frac{\partial {\psi}_{z}}{\partial y}\\ {\sigma}_{xz}=\mu \frac{\partial {\psi}_{z}}{\partial z}\end{array}\)
L’équation d’équilibre permet alors d’obtenir la fonction \({\psi}_{z}\) par résolution d’un problème quasi‑harmonique qui s’écrit:
\(\begin{array}{}G\Delta {\psi}_{z}+f=0\text{dans}S\text{avec}f=\frac{{\mathrm{zV}}_{z}}{{I}_{y}}\\ G\frac{\partial {\psi}_{z}}{\partial n}=0\text{sur}\partial S\\ {\psi}_{z}=0\text{en un point}\end{array}\)
Ceci permet de calculer \({\psi}_{z}\) puis les cisaillements. En pratique, dans MACR_CARA_POUTRE, on utilise THER_LINEAIRE pour résoudre le problème, en assimilant \({\psi}_{z}\) à la température. On choisit \(V=1\) et \(G=1\) (\(G\) n’intervient plus dans l’expression du coefficient de cisaillement). Les conditions aux limites de ce problème de thermique stationnaire sont:
source \(f\) valant \(\frac{{\text{zV}}_{z}}{{I}_{y}}\)
flux nul sur \(\partial S\)
température nulle en un point de \(S\)
On peut ensuite déterminer \({U}_{1}^{z}={\int}_{s}\frac{1}{2}\frac{{\sigma}_{xy}^{2}+{\sigma}_{xz}^{2}}{G}\text{dS}=\frac{1}{2}{\int}_{s}G{(\nabla {\psi}_{z})}^{2}\text{dS}\) par un calcul élémentaire sur tous les éléments de la section, avec l’option ’CARA_CISA’ (calcul du gradient), puis sommation sur ces éléments. On calcule alors \({k}_{z}=\frac{1}{2}\frac{{V}_{z}^{2}}{{\text{SGU}}_{1}^{z}}\)
Le même calcul est effectué avec \({V}_{y}=1\) pour déterminer \({k}_{y}=\frac{1}{2}\frac{{V}_{y}^{2}}{{\text{SGU}}_{{}_{1}}^{y}}\)
Le résultat fourni est \({A}_{y}=\frac{1}{{k}_{y}},{A}_{z}=\frac{1}{{k}_{z}}\) .
Calcul des coordonnées du centre de cisaillement#
Le centre de cisaillement \(C\) est le point de la section où les contraintes de cisaillement dues à un effort tranchant engendrent un moment de torsion nul. Ce point est aussi appelé centre de torsion, car il reste fixe quand le section est seulement soumise à un moment de torsion.
Le moment de torsion par rapport au point \(G\) vaut \({M}_{\text{xG}}={\int}_{s}({\sigma}_{xz}.y-{\sigma}_{xy}.z)\text{dS}\) :
Le moment de torsion par rapport au point \(C\) cherché est:
\({M}_{\text{xC}}={\int}_{s}({\sigma}_{xz}.(y-{y}_{c})-{\sigma}_{xy}(z-{z}_{c}))\text{dS}={M}_{\text{xG}}-{y}_{c}{V}_{z}+{z}_{c}{V}_{y}\)
Pour déterminer les coordonnées du centre de cisaillement, on utilise le calcul précédent[bib]:
A partir des contraintes de cisaillement déterminées pour \(V=1\) et \({V}_{y}=0\) , on calcule: \({M}_{{}_{\text{xG}}}^{z}={\int}_{s}({\sigma}_{xz}.y-{\sigma}_{xy}.z)\text{dS}\)
On obtient: \({y}_{c}=\frac{{M}_{{}_{\text{xG}}}^{z}}{{V}_{z}}={M}_{{}_{\text{xG}}}^{z}\)
Pour \(V=1\) et \({V}_{y}=0\) , on obtient: \({z}_{c}=-\frac{{M}_{\mathrm{xG}}^{y}}{{V}_{y}}=-{M}_{{}_{\text{xG}}}^{y}\)
Exemple#
Reprenons l’exemple de la section rectangulaire [§1.1.4].
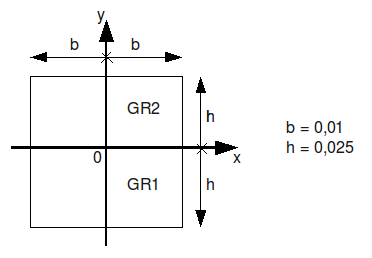
Les coefficients de cisaillement obtenus sont identiques à la valeur analytique (6/5).
\(\mathrm{LIEU}\) |
\(\mathrm{AY}\) |
\(\mathrm{AZ}\) |
\(\mathrm{EY}\) |
\(\mathrm{EZ}\) |
tout |
1.20E+00 |
1.20E+00 |
–8.72E-19 |
3.16E–18 |
Les composantes du vecteur \(\mathrm{CG}=(\mathrm{EY},\mathrm{EZ})\) exprimées dans le repère principal \((G,y,z)\) sont nulles: le centre de cisaillement/torsion est effectivement confondu avec le centre de gravité.
Calcul des coefficients de cisaillement d’un réseau#
La méthode décrite en annexe 2 permet de calculer des coefficients de cisaillement d’une poutre équivalente à un ensemble de poutres parallèles encastrées sur un plancher rigide et encastrées ou rotulées sur un autre.
Les constantes liées à la torsion#
La constante de torsion notée \(\mathit{JX}\) doit permettre de tenir compte du gauchissement des sections droites (non circulaires) lors d’une déformation en torsion. Elle est utilisée dans les modèles de poutres droites traités par Aster (EULER, TIMOSHENKO et TIMOSHENKO gauchie ou POU_D_E, POU_D_T et POU_D_TG). Dans le cas des sections circulaires, les sections ne sont pas gauchies et la constante de torsion est égale au moment géométrique polaire \({I}_{p}\) . La constante de torsion \(C\) est définie comme le moment nécessaire pour produire une rotation de 1radian par unité de longueur divisé par le module de cisaillement , soit:
\(C=\frac{{M}_{x}}{\mu \frac{\partial {\theta}_{x}}{\partial x}}\) [8]
\(\mathit{JX}\) a la même dimension que les moments d’inertie géométriques \({I}_{y}\) et \({I}_{z}\) soit \({m}^{4}\) .
Pour une section circulaire, la définition [éq] est cohérente puisque nous avons:
\({M}_{x}=\mu {I}_{p}\frac{\partial {\theta}_{x}}{\partial x}\)
La détermination de \(\mathit{JX}\) dans le cas général se fait de façon numérique (MACR_CARA_POUTRE) et se réduit à un calcul de Laplacien en 2D. La méthode présentée ici est détaillée dans la réf. [bib] [§3.6.3] pour les sections simplement connexes. Une méthode originale pour le calcul des constantes de torsion avec sections trouées est détaillée en annexe. On donne ici les résultats.
Calcul de C dans le cas des sections quelconques#
La résolution complète du problème se trouve en annexe. On donne ici simplement les résultats.
Suivant les hypothèses de la théorie de la torsion pure de Saint-Venant, il n’y a pas de déformation de la ligne moyenne et pas d’allongement le long de l’axe longitudinal. La torsion est libre, c’est à dire qu’elle ne génère pas de contraintes axiales. En d’autres termes, les sections peuvent gauchir librement. Si l’on reste en petits déplacements, on admet que l’angle de rotation des sections droites vaut:
\({q}_{x}(x)=\frac{\partial {\theta}_{x}}{\partial x}x=\Theta .x\) [9]
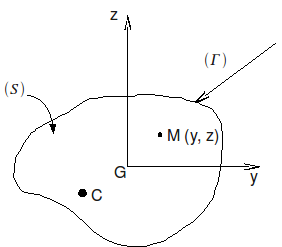
Figure 8 : section générale.
Si le point \(c\) est le centre de torsion (qui par définition reste immobile quand la poutre est soumise à une torsion), le champ de déplacement \(u(M)\) est donné par [bib]:
\(u(M)=\left[\begin{array}{c}u\\ v\\ w\end{array}\right]=\left[\begin{array}{c}\frac{\partial {\theta}_{x}}{\partial x}x\\ 0\\ 0\end{array}\right]\wedge \left[\begin{array}{c}x\\ (y-{y}_{c})\\ (z-{z}_{c})\end{array}\right]+\left[\begin{array}{c}\frac{\partial {\theta}_{x}}{\partial x}\xi (y,z)\\ 0\\ 0\end{array}\right]\) \(=(\begin{array}{c}\frac{\partial {\theta}_{x}}{\partial x}\xi (y,z)\\ -\frac{\partial {\theta}_{x}}{\partial x}x(z-{z}_{c})\\ \frac{\partial {\theta}_{x}}{\partial x}x(y-{y}_{c})\end{array})\)
où \(\xi (y,z)\) est la fonction de gauchissement.
La loi de HOOKE s’écrit:
\(\sigma =2\mu \varepsilon +(E-2\mu )\mathrm{Trace}(\varepsilon )I\)
où \(I\) est la matrice unité et le tenseur des déformations vaut \(\varepsilon =\frac{1}{2}(\text{grad}(u)+{}^{T}\text{}\text{grad}(u))\)
En négligeant les termes du second ordre, en \(\frac{{\partial}^{2}{\theta}_{x}}{\partial {x}^{2}}\) , on aboutit à:
\(\sigma =\mu \frac{\partial {\theta}_{x}}{\partial x}\left[\begin{array}{ccc}0& \frac{\partial \xi }{\partial y}-z& \frac{\partial \xi }{\partial z}+y\\ \frac{\partial \xi }{\partial y}-z& 0& 0\\ \frac{\partial \xi }{\partial z}+y& 0& 0\end{array}\right]\) \(=\mu \frac{\partial {\theta}_{x}}{\partial x}\left[\begin{array}{ccc}0& \frac{\partial \varphi }{\partial z}& -\frac{\partial \varphi }{\partial y}\\ \frac{\partial \varphi }{\partial z}& 0& 0\\ -\frac{\partial \varphi }{\partial y}& 0& 0\end{array}\right]\) [10]
On a posé: \(\varphi (y,z)\) fonction de contrainte. On note que la relation d’équilibre \(divs=0\) est alors vérifiée. En dérivant, on obtient:
\(\begin{array}{c}\frac{{\partial}^{2}\varphi }{\partial {y}^{2}}=-\frac{{\partial}^{2}\xi }{\partial z\partial y}-1\\ \frac{{\partial}^{2}\varphi }{\partial {z}^{2}}=\frac{{\partial}^{2}\xi }{\partial y\partial z}-1.\end{array}\)
En additionnant les deux équations, on aboutit à:
\(\Delta \varphi =-2\) [11]
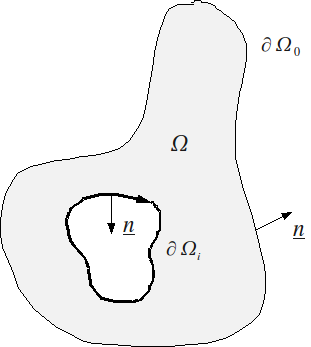
Il reste à établir les conditions aux limites. On note \(n\) la normale dirigée vers l’extérieur à la frontière (\(\Gamma\) ) qui peut être multiplement connexe:
Sans chargement extérieur, on doit avoir \(\sigma \otimes n=0\) , ce qui peut s’écrire:
\(\mu \frac{\partial {\theta}_{x}}{\partial x}\left[\begin{array}{c}\frac{\partial \varphi }{\partial z}{n}_{y}-\frac{\partial \varphi }{\partial y}{n}_{z}\\ 0\\ 0\end{array}\right]=0\) où \({n}_{y}\) et \({n}_{z}\) sont les deux composantes de la normale.
Cette écriture peut ainsi se mettre sous la forme \(n\wedge \text{grad}\varphi =0\) qui implique que les vecteurs \(n\) et \(\text{grad}j\) sont colinéaires. Il s’ensuit donc que \(\varphi (y,z)\) est constante sur chaque composante connexe de la frontière (\(\Gamma\) ). On peut imposer par exemple que \(\varphi (y,z)\) soit nulle sur le contour extérieur:
\(\varphi =0\) sur \(\partial {\Omega}_{0}=\Gamma\)
\(\varphi ={\varphi}_{i}\) sur \(\partial {\Omega}_{i}\)
Dans le cas où les sections comportement des trous, les constantes \({\varphi}_{i}\) sont indéterminées. Pour permettre la résolution du problème complet, il faut ajouter des équations. Celles-ci sont obtenues à partir de la circulation de la fonction de gauchissement sur chaque contour fermé. On obtient les conditions suivantes:
\({\oint}_{\partial {\Omega}_{i}}\frac{\partial \varphi }{\partial n}\text{dl}=\mathrm{2A}(\partial {\Omega}_{i})\)
où \(A(\partial {\Omega}_{i})\) est l’aire entourée par la frontière \((\partial {\Omega}_{i})\) . Ces conditions se ramènent à des conditions classiques de flux imposé(où \(l(\partial {\Omega}_{i})\) représente la longueur de la frontière \((\partial {\Omega}_{i})\) ):
\(\frac{\partial \varphi }{\partial \underline{n}}=\frac{\mathrm{2A}(\partial {\Omega}_{i})}{l(\partial {\Omega}_{i})}\)
Finalement, le problème à résoudre s’écrit:
\(\Delta \varphi =-2\) sur \(\Omega\)
\(\varphi =0\) sur \(\partial {\Omega}_{0}=\Gamma\)
\(\varphi ={\varphi}_{i}\) sur \((\partial {\Omega}_{i})\)
\(\frac{\partial \varphi }{\partial \underline{n}}=\frac{\mathrm{2A}(\partial {\Omega}_{i})}{l(\partial {\Omega}_{i})}\)
Une fois résolu ce problème, on obtient la constante de torsion par:
\(\mathrm{CT}=2{\int}_{\Omega}\varphi \text{ds}+2\sum_{i=1}^{n-1}{\varphi}_{i}A(\partial {\Omega}_{i})\) .
Calcul de la constante de torsion dans MACR_CARA_POUTRE#
Ce calcul s’effectue dans MACR_CARA_POUTRE par la résolution d’un problème de thermique. Il faut pour cela que l’utilisateur précise à MACR_CARA_POUTRE le groupe de maille qui définit le bord extérieur, et si la section comporte des trous, les groupes de mailles qui définissent le contour de chacun d’entre eux.
On résout alors un problème de thermique linéaire (THER_LINEAIRE) sur un maillage plan de la section pour trouver la fonction \(j\) . On se place tout d’abord dans le repère principal d’inertie (CREA_MAILLAGE), à partir des coordonnées du centre de gravité et de l’orientation du repère principal calculés précédemment.
On définit ensuite les conditions aux limitesdans AFFE_CHAR_THER:
Le terme source vaut –2
La température du bord extérieur est imposée et vaut 0 (TEMP_IMPO)
Si la section comporte des trous (présence d’un ou plusieurs groupes de mailles les définissant):
Sur chaque groupe de maille définissant un trou, la température est constante (TEMP_UNIF)
Le flux vaut 2 fois l’aire du trou divisée par la longueur de son bord. Ces quantités sont calculées auparavant .
Le calcul de \(\mathit{JX}\) est effectué dans POST_ELEM par le mot-clé CARA_TORSION du mot-clé facteur CARA_POUTRE. Dans ce cas, on calcule sur chaque élément l’intégrale de \(j\) , (option CARA_TORSION sur les éléments thermiques plans), puis on effectue la somme sur tous les éléments.
Exemple:
Reprenons encore l’exemple de la section rectangulaire [§1.1.4]. Les coefficients de cisaillement obtenus sont:
LIEU |
\(\mathit{JX}\) [éq] |
\(\mathit{JX}\) (Aster) |
tout |
9.9805E-08 |
9.9681E-08 |
Calcul du rayon de torsion dans une section quelconque#
Le rayon de torsion est calculé grâce au calcul de la fonction de contraintes sur le maillage de la section. \(\mathrm{Rt}\) est ajouté dans la table produite par MACR_CARA_POUTRE [U4.42.02].
La résolution d’un problème thermique stationnaire d’inconnue \(j\) permet de déterminer la constante de torsion et les contraintes de cisaillement.
La détermination du rayon de torsion \(\mathrm{Rt}\) est la résolution de: \(\mathrm{Rt}=\mathrm{grad}(\varphi ).n\) (ou \(n\) représente le vecteur normal extérieur au bord considéré de la section).
\(\mathrm{Rt}\) varie le long du contour externe; en effet, pour une section quelconque, les cisaillements dus à la torsion varient sur le bord. On choisit de prendre la valeur de \(\mathrm{Rt}\) conduisant aux cisaillements maximum sur le bord externe, c’est à dire la valeur maximum de \(\mathrm{Rt}\) (en valeur absolue) sur le contour externe.
De plus, si la section est alvéolée, on a plusieurs « plusieurs rayons de torsion »: \(\mathrm{Rt}=2\ast A(k)/L(k)\) (où \(A(k)\) représente l’aire de l’alvéole \(k\) et \(L(k)\) son périmètre). Si on se contente de rechercher la valeur maximale du cisaillement, il faut prendre le maximum des valeurs \(\mathrm{Rt}\) obtenues sur le bord externe et sur les alvéoles.
Le rayon de torsion est déterminé dans MACR_CARA_POUTRE uniquement par des commandes python. Lors du déroulement de MACR_CARA_POUTRE la commande POST_ELEM est appelée, un nouveau paramètre \(\mathrm{Rt}\) est donc créé pour cette commande.
Constante de torsion des sections circulaire et rectangulaire#
Des expressions simplifiées pour ces deux types de sections sont décrites ici. Le calcul des constantes de torsion est alors directement effectué dans AFFE_CARA_ELEM.
Pour la section circulaire les expressions précédentes restent valides. En prenant une fonction de torsion de la forme \(\varphi (y,z)=\frac{1}{2}({R}^{2}-{x}^{2}-{y}^{2})\) on retrouve effectivement:
\(\mathrm{CT}={I}_{p}=\frac{\pi}{2}({R}_{0}^{4}-{R}_{1}^{4})\)
Pour la section rectangulaire, le calcul est naturellement plus complexe mais peut s’effectuer en choisissant une fonction qui s’annule effectivement aux bords, de la forme:
\(\varphi (y,z)=\sum_{i=0}^{+\infty }\sum_{j=0}^{+\infty }{A}_{ij}\cos\left[(\mathrm{2i}+1)\frac{\pi y}{{h}_{y}}\right]\cos\left[(\mathrm{2j}+1)\frac{\pi z}{{h}_{z}}\right]\)
La résolution entraîne à une constante de torsion qui s’écrit:
\(\mathrm{CT}=\frac{{h}_{y}^{3}{h}_{z}^{3}}{{h}_{y}^{2}+{h}_{z}^{2}}c(\frac{{h}_{y}}{{h}_{z}})={h}_{y}{h}_{z}^{3}\left[\frac{c(\frac{{h}_{y}}{{h}_{z}})}{1+{(\frac{{h}_{z}}{{h}_{y}})}^{2}}\right]\) [12]
où \(c(\frac{{h}_{y}}{{h}_{z}})\) s’exprime sous la forme d’une série qui prend les valeurs suivantes:
\(\begin{array}{cccccc}\frac{{h}_{y}}{{h}_{z}}& 1& 2& 4& 8& +\infty \\ c(\frac{{h}_{y}}{{h}_{z}})& 0,281& 0,286& 0,299& 0,312& 1/3\end{array}\)
En fait, Code_Aster emploie une formule simplifiée (réf. [bib]) pour la section rectangulaire pleine qui s’écrit:
\(\mathrm{CT}=\frac{{h}_{y}{h}_{z}^{3}}{16}(\frac{16}{3}-3.36\frac{{h}_{z}}{{h}_{y}}+0.280{(\frac{{h}_{z}}{{h}_{y}})}^{5})\) [13]
Elle est valable si \({h}_{y}>{h}_{z}\) ; dans l’autre cas il suffit d’échanger les places respectives de \({h}_{y}\) et \({h}_{z}\) . La concordance entre les deux expressions est très bonne comme l’indique le tableau suivant:
\(\frac{{h}_{y}}{{h}_{z}}\) |
1 |
2 |
4 |
8 |
∞ |
\(\frac{\mathit{JX}}{{h}_{y}{h}_{z}^{3}}\) selon [éq] |
0,1405 |
0,2288 |
0,2814 |
0,3072 |
1/3 |
\(\frac{\mathit{JX}}{{h}_{y}{h}_{z}^{3}}\) selon Aster [éq] |
0,1408 |
0,2289 |
0,2809 |
0,3071 |
1/3 |
Pour la poutre rectangulaire creuse, il existe une solution approchée qui s’écrit (réf. [bib] et [bib]):
\(\mathit{JX}=\frac{2{\text{ep}}_{y}{\text{ep}}_{z}{({h}_{y}-{\text{ep}}_{y})}^{2}{({h}_{z}-{\text{ep}}_{z})}^{2}}{{h}_{y}{\text{ep}}_{y}-{\text{ep}}_{y}^{2}+{h}_{z}{\text{ep}}_{z}-{\text{ep}}_{z}^{2}}\)
avec les notations de la [Figure]: section dans le plan \((0,y,z)\) .
Le rayon de torsion efficace#
Le rayon de torsion efficace \({R}_{T}\) permet de calculer la contrainte de cisaillement transverse de torsion maximale \({\sigma}_{{T}_{M}}\) en fonction du moment de torsion. On pourra consulter à ce sujet la rédaction de MASSONET sur cet aspect (réf. [bib]). Nous avons ainsi:
\({\sigma}_{{T}_{M}}={M}_{x}\frac{{R}_{T}}{\mathit{JX}}\)
Dans le cas des cylindres circulaires, \({R}_{T}\) est égal au rayon (extérieur si c’est un tube) de la section.
Pour les sections rectangulaires, le problème est nettement plus complexe. Code_Aster impose le rayon de torsion de la section pleine par:
\({R}_{T}=\frac{\mathit{JX}4(3{h}_{y}+1.8{h}_{z})}{{h}_{y}^{2}+{h}_{z}^{2}}\)
Cette expression approchée reste valable si la poutre n’est pas trop aplatie. DHATT et BATOZ (réf.[bib]) donnent une expression ayant un domaine de validité plus étendu, mais en réalité il s’agit en toute rigueur d’une série dont des valeurs numériques sont données par MASSONET (réf. [bib]).
Pour la poutre rectangulaire creuse, Code_Aster impose une expression qui n’est valable que si la paroi est mince et d’épaisseur constante \({\mathrm{ep}}_{z}\) , soit:
\({R}_{T}=\frac{\mathit{JX}}{{\text{ep}}_{z}({h}_{y}-2{\text{ep}}_{y})({h}_{z}-2{\text{ep}}_{z})}\)
Il s’agit d’une « adaptation » de la formule:
\({R}_{T}=\frac{\mathit{JX}}{2eA}\)
où \(e\) est l’épaisseur de la paroi (constante) et \(A\) l’aire contenue à l’intérieur de la ligne moyenne. Cette dernière expression est connue sous le nom de première formule de BREDT (Cf.réf. [bib] et [bib]).
Calcul de la constante de gauchissement#
La constante de gauchissement est utilisée par le modèle de poutre avec gauchissement (modélisation POU_D_TG et POU_D_TGM), qu’il est important de prendre en compte pour les poutres à sections minces ouvertes (cf.[R3.08.04]).
Ce coefficient (noté \({I}_{w}\) en [R3.08.04], en \({m}^{6}\) ) intervient dans l’expression du travail virtuel des efforts intérieurs sur les termes de torsion:
\({W}_{int}={\int}_{0}^{2}({\theta}_{x,x}^{\text{*}}\mu .C.{\theta}_{x,x}+{\theta}_{x,xx}^{\text{*}}.E.{I}_{\omega}.{\theta}_{x,xx})\text{dx}\)
En reprenant l’approche du [§3.1], et en se plaçant dans un repère lié au centre de torsion \(C\) , la cinématique de la torsion d’une section quelconque est:
\(u(M)=\left[\begin{array}{c}u\\ v\\ w\end{array}\right]=\left[\begin{array}{c}\frac{\partial {\theta}_{x}}{\partial x}x\\ 0\\ 0\end{array}\right]\wedge \left[\begin{array}{c}x\\ y\\ z\end{array}\right]+\left[\begin{array}{c}\frac{\partial {\theta}_{x}}{\partial x}\xi (y,z)\\ 0\\ 0\end{array}\right]\) \(=(\begin{array}{c}\frac{\partial {\theta}_{x}}{\partial x}\text{}\xi (y,z)\\ -\frac{\partial {\theta}_{x}}{\partial x}xz\\ \frac{\partial {\theta}_{x}}{\partial x}xy\end{array})\)
où \(\xi (y,z)\) est la fonction de gauchissement (qui ne s’annule que dans le cas d’une section circulaire).
L’expression du champ de contraintesest (en élasticité):
\(\begin{array}{}{\sigma}_{xx}=E{\varepsilon}_{xx}=E\xi (y,z)\frac{{\partial}^{2}{\theta}_{x}}{\partial {x}^{2}}\\ {\sigma}_{xy}=2\mu {\varepsilon}_{xy}=\mu \frac{\partial {\theta}_{x}}{\partial x}(\frac{\partial \xi (y,z)}{\partial y}-z)\\ {\sigma}_{xz}=2\mu {\varepsilon}_{xz}=\mu \frac{\partial {\theta}_{x}}{\partial x}(\frac{\partial \xi (y,z)}{\partial z}-y)\end{array}\)
A la différence du [§4], les termes du second ordre en \(\frac{{\partial}^{2}{\theta}_{x}}{\partial {x}^{2}}\) ne sont plus négligés.
La première relation d’équilibre \({(div\sigma )}_{x}={\sigma}_{xx,x}+{\sigma}_{xy,y}+{\sigma}_{xz,z}=0\) implique alors la condition suivante sur la fonction de gauchissement: \(\Delta \xi =0\)
D’autre part, sans chargement extérieur sur le contour de la section , on doit avoir \(\sigma \otimes n\) , ce qui peut s’écrire: \(\frac{\partial \xi }{\partial y}{n}_{y}+\frac{\partial \xi }{\partial z}{n}_{z}=z.{n}_{y}-y.{n}_{z}\) , où \({n}_{y}\) et \({n}_{z}\) sont les deux composantes de la normale, ou encore sous forme vectorielle: \(\text{grad}\xi .n=\frac{\partial \xi }{\partial n}=(n\wedge \text{CM}).x\)
Ceci détermine la fonction de gauchissement à une constante près. Pour lever cette indétermination, on écrit par exemple l’expression de l’effort normal (pour une section où la torsion produit du gauchissement):
\(N=\underset{S}{\int}{\sigma}_{xx}\text{ds}=\underset{S}{\int}E\xi \frac{{\partial}^{2}{\theta}_{x}}{\partial {x}^{2}}\text{ds}=0\)
donc la condition supplémentaire sur la fonction de gauchissement est \(\underset{S}{\int}\xi \text{ds}=0\) . En pratique, dans MACR_CARA_POUTRE, on se place avant tout dans un repère lié au centre de torsion \(c\) .
On calcule ensuite \(\xi\) qui doit vérifier:
\(\begin{array}{}\Delta x\text{=0}\\ \text{grad}x.n=\frac{\partial \xi }{\partial n}=(n\wedge \text{CM}).x\\ \underset{S}{\int}x\text{ds}=0\end{array}\)
L’inertie de gauchissement \({I}_{\omega}\) s’obtient alors par: \({I}_{\omega}=\underset{S}{\int}{\xi}^{2}\text{ds}\)
MACR_CARA_POUTRE fait appel aux commandes élémentaires suivantes:
Translation des coordonnées des nœuds dans le repère lié au centre de torsion (calculé précédemment dans la table TCARS):
CREA_MAILLAGE(MAILLAGE= ma,
REPERE = _F(TABLE = TCARS, NOM_ORIG = ’TORSION’ ))
Affectation d’un modèle (thermique plan), d’un champ de matériau:
AFFE_MODELE(MAILLAGE = ma,
AFFE = _F(TOUT = ’OUI’, PHENOMENE = ’THERMIQUE’,
MODELISATION=’PLAN’) )
AFFE_MATERIAU(MAILLAGE = ma,
AFFE = _F(TOUT = ’OUI’ MATER: mat) )
Conditions aux limites sur le contour extérieur \(\mathrm{G0}\) : \(\frac{\partial \xi }{\partial y}{n}_{y}+\frac{\partial \xi }{\partial z}{n}_{z}=z.{n}_{y}-y.{n}_{z}\)
F1=DEFI_FONCTION(NOM_PARA = , VALE = (0., 0., 10., -10. ))
F2=DEFI_FONCTION(NOM_PARA = , VALE = (0., 0., 10., 10. ))
CH1 = AFFE_CHAR_THER_F(MODELE = mod,
FLUX_REP = _F(GROUP_MA = G0, FLUX_X = F1, FLUX_Y = F2))
Condition sur le champ solution: \(\underset{S}{\int}\xi \text{ds}=0\) : création d’un terme source unitaire sur tout le maillage, et du vecteur second membre associé. LIAISON_CHAMNO permet alors d’imposer la condition désirée.
CHS = AFFE_CHAR_THER( MODELE =
SOURCE = _F(TOUT = ’OUI’ SOUR = 1.))
VS = CALC_VECT_ELEM(OPTION = ’CHAR_THER’ CHARGE= CHS…)
MS = CALC_MATR_ELEM(MODELE= … OPTION = ’RIGI_THER’)
NUM = NUME_DDL(MATR_RIGI = MS)
VA = ASSE_VECTEUR( VECT_ELEM= VS NUME_DDL= NUM)
CH2 = AFFE_CHAR_THER(
LIAISON_CHAMNO = _F(CHAM_NO = VA COEF_IMPO = 0.))
Calcul de la fonction de gauchissement \(x\) :
THER_LINEAIRE(MODELE= ….
EXCIT = (
_F( CHARGE: CH1 ),
_F( CHARGE: CH2 ),
)
)
Calcul de la constante de gauchissement \({I}_{\omega}=\underset{S}{\int}{\xi}^{2}\text{ds}\) et enrichissement de la table:
TCARS = POST_ELEM(MODELE=…
CARA_POUTRE = _F(CARA_GEOM = TCARS,
LAPL_PHI = KSI OPTION:’CARA_GAUCHI’ ) ) ;
Bibliographie#
[1] BATOZ J.L. & DHATT G.: « Modélisation des structures par éléments finis. Volume 2, poutres et plaques ». HERMES, Paris, 1990
[2] BLEVINS R.D.: « Formulas for natural frequency and mode shape ». Van Nostrand Reinhold, New-York, 1979.
[3] COWPER G.R.: « The shear coefficient in Timoshenko’s beam theory ». J. of Applied Mechanics, June 1966, pp 335-340.
[4] HSU Y.W.: « The shear coefficient of beams of circular cross section ». J. of Applied Mechanics, March 1975, pp 226-228.
[5] MASSONET C. & CESCOTTO S.: « Mécanique des matériaux ». De boeck Université, Bruxelles, 1994.
[6] PILKEY W.D.: « Formulas for stress, Strain and Structural Matrices ». Wiley & Sons, New-York, 1994.
[7] REISSNER E. & TSAI W.T.: « On the determination of the centers of twist and of shear for cylindrical shell beams ». J. of Applied Mechanics, december 1972, pp1098-1102.
[8] BAMBERGER Y.: Cours de Résistance des Matériaux - Ecole Nationale de Ponts et Chaussées. 1994.
[9] TIMOSHENKO S. Résistance des Matériaux - Dunod 1968
[10] Document [U4.24.01]: Opérateur AFFE_CARA_ELEM
[11] VOLDOIRE F: « Éléments de résistance des matériaux. Travaux dirigés de l’ENPC ». Note EDF/MMN HI-74/96/002/0
Description des versions du document:
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
7.4 |
J.M. Proix , N. Laurent, P.Hémon, G. Bertrand EDF-R&D/AMA, IAT St Cyr, CS-SI |
|
8.5 |
J.M.Proix, EDF-R&D/AMA |
Correction d’unité page 24 , fiche REX 10783 |
10 |
Jean-Luc FLÉJOU, EDF-R&D/AMA |
Mise en forme, correction formules, fiche REX 16337 |
12.4 |
Jean-Luc FLÉJOU, EDF-R&D/AMA |
Suppression POU_C_T (23282) |
Détermination de la constante de torsion pour des sections a frontières multiplement connexes
Soit une poutre élastique, isotrope, de longueur \(L\) et de section quelconque \(\Omega\) qui peut être non simplement connexe. On note \(\partial {\Omega}_{0}\) le contour extérieur de \(\Omega\) et \(\partial {\Omega}_{1}\) , pour \(i=\mathrm{1...n}-1\) , les éventuels contours intérieurs. On note \(\partial \Omega =\underset{i=0}{\overset{n-1}{\cup}}\partial {\Omega}_{i}\) sa frontière totale.
On choisit l’axe \({\underline{x}}_{1}\) selon la ligne des centres de gravité des sections droites. On suppose pour simplifier la démonstration que le centre de torsion est confondu avec le centre de gravité, ce qui permet de découpler les effets de torsion et de flexion. Les axes \({\underline{x}}_{2}\) et \({\underline{x}}_{3}\) sont choisis suivants les directions principales d’inertie.
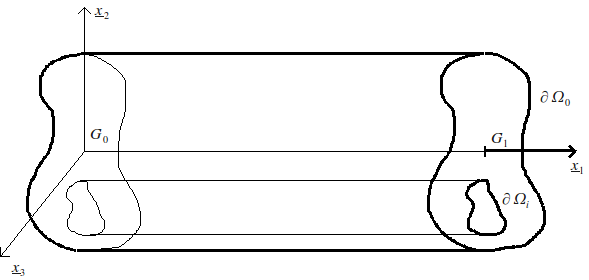
Figure 9 : Poutre à section quelconque.
La poutre est chargée sur sa section \({x}_{1}=L\) par un moment de torsion \({\underline{M}}_{{G}_{1}}={M}_{t}{\underline{x}}_{1}\) .
D’autre part, la surface latérale du cylindre n’est pas chargée et les forces de volume sont nulles.
On en déduit immédiatement que le torseur des forces intérieures au point \({G}_{0}\) est \({\underline{M}}_{{G}_{0}}={M}_{t}{\underline{x}}_{1}\)
Le problème d’élasticité posé précédemment apparaît comme incomplètement défini. En effet, les conditions aux limites sur les sections droites \({x}_{1}=L\) et \({x}_{1}=0\) sont incomplètes car on n’a pas une condition en chaque point, mais en moyenne. Il y a donc, a priori , une infinité de solutions. L’hypothèse de Saint-Venant consiste à rechercher une solution telle que le tenseur des contraintes soit de la forme:
\(\sigma =\left[\begin{array}{ccc}{\sigma}_{11}& {\sigma}_{12}& {\sigma}_{13}\\ {\sigma}_{12}& 0& 0\\ {\sigma}_{13}& 0& 0\end{array}\right]\)
Le principe de Saint-Venant est valable loin des sections d’application des forces. En effet, sauf dans des cas de chargements particuliers, les quatre termes supposés nuls s’amortissent exponentiellement avec \({x}_{1}\) .
Pour résoudre ce problème d’élasticité, on choisit une formulation en contraintes. Les équations à écrire sont donc celles d’équilibre et celles de compatibilité.
Les équations d’équilibre \(div\sigma =\underline{0}\) conduisent aux trois équations scalaires suivantes:
\({\partial}_{1}{\sigma}_{11}+{\partial}_{2}{\sigma}_{12}+{\partial}_{3}{\sigma}_{13}=0\) [14]
\(\begin{array}{}{\partial}_{1}{\sigma}_{12}=0\\ {\partial}_{1}{\sigma}_{13}=0\end{array}\) [15]
(avec la notation simplifiée:) \({\partial}_{i}{\sigma}_{\text{jk}}=\frac{\partial {\sigma}_{\text{jk}}}{\partial {x}_{i}}\)
Les équations de Beltrami, qui tiennent compte des équations de compatibilité s’écrivent:
\(-\Delta {\sigma}_{11}-{\partial}_{11}{\sigma}_{11}=0\) [16]
\(-\Delta {\sigma}_{12}-\frac{1}{1+\nu }{\partial}_{12}{\sigma}_{11}=0\) [17]
\(-\Delta {\sigma}_{13}-\frac{1}{1+\nu }{\partial}_{13}{\sigma}_{11}=0\) [18]
\(-{\partial}_{22}{\sigma}_{11}+\nu \Delta {\sigma}_{11}=0\) [19]
\(-{\partial}_{23}{\sigma}_{11}=0\) [20]
\(-{\partial}_{33}{\sigma}_{11}+\nu \Delta {\sigma}_{11}=0\) [21]
Les équations [éq], [éq et [éq] montrent que \({\partial}_{11}{\sigma}_{11}\) , \({\partial}_{22}{\sigma}_{22}=0\) et \({\partial}_{33}{\sigma}_{11}\) sont solutions d’un système linéaire homogène et donc que \({\partial}_{11}{\sigma}_{11}={\partial}_{22}{\sigma}_{11}={\partial}_{33}{\sigma}_{11}=0\) . Avec l’équation [éq], on en déduit que \({\sigma}_{11}={a}_{0}+{a}_{1}{x}_{1}+({b}_{1}{x}_{1}+{b}_{0}){x}_{2}+({c}_{1}{x}_{1}+{c}_{0}){x}_{3}\) . En tenant compte du fait que l’on traite le problème de la torsion libre, on prendra \({\sigma}_{11}\) nul à partir de maintenant.
Les équations [éq] et [éq] montrent que \({\sigma}_{12}\) et \({\sigma}_{13}\) ne dépendent pas de \({x}_{1}\) . L’équation [éq] s’écrit:
\({\partial}_{2}\left[{\sigma}_{12}+f({x}_{3})\right]={\partial}_{3}\left[-{\sigma}_{13}-g({x}_{2})\right]\)
où \(f\) et \(g\) sont deux fonctions arbitraires. D’après le théorème de Schwartz, il existe \(\varphi ({x}_{2,}{x}_{3})\) telle que:
\(\lbrace \begin{array}{c}{\partial}_{2}\varphi =-{\sigma}_{13}-f({x}_{2})\\ {\partial}_{3}\varphi ={\sigma}_{12}+g({x}_{3})\end{array}=\lbrace \begin{array}{c}{\sigma}_{12}={\partial}_{3}\varphi -f({x}_{3})\\ {\sigma}_{13}=-{\partial}_{2}\varphi +g({x}_{2})\end{array}\)
Les équations [éq] et [éq] donnent:
\(\lbrace \begin{array}{c}{\partial}_{3}\Delta \varphi =0\\ {\partial}_{2}\Delta \varphi =0\end{array}\)
soit \(\Delta \varphi ={\partial}_{3}f-{\partial}_{2}f+K\)
où \(K\) est une constante d’intégration. Comme \(f\) et \(g\) sont arbitraires, on les prendra identiquement nulles. Le problème à résoudre est donc un problème de laplacien: \(\Delta \varphi =K\) sur \(\Omega\) puis:
\(\sigma =\left[\begin{array}{ccc}0& {\partial}_{3}\varphi & -{\partial}_{2}\varphi \\ {\partial}_{3}\varphi & 0& 0\\ -{\partial}_{2}\varphi & 0& 0\end{array}\right]\)
Il reste à écrire les conditions aux limites, qui nous permettront d’écrire des conditions sur \(\varphi \Omega\) pour \(\varphi\) et sur \(K\)
Les conditions aux limites sont à écrire sur toute la frontière. Sur les sections droite \({x}_{1}=L\) (et de même en \({x}_{1}=0\) ), on a:
\({\int}_{\Omega}{\sigma}_{12}\text{ds}=0\)
\({\int}_{\Omega}{\sigma}_{13}\text{ds}=0\)
\({\int}_{\Omega}{x}_{2}{\sigma}_{13}-{x}_{3}{\sigma}_{12}\text{ds}={M}_{t}\) [22]
Soit \(\underline{n}\) la normale extérieure à \(\partial \Omega\) . On a \(\sigma \otimes n=0\) . On pose \(\tau ={\sigma}_{12}{x}_{2}+{\sigma}_{13}{x}_{3}\) . On peut aussi écrire \(\tau ={\sigma}_{12}{x}_{2}+{\sigma}_{13}{x}_{3}\) ; \(\tau\) est appelée la partie tangentielle de la contrainte dans la section droite. Soit \({N}_{i}\) le point courant du contour \(\varphi \Omega\) pour \(i=0,\mathrm{...},n-1\) . La condition, sur la surface latérale, énoncée plus haut, peut s’écrire \(\tau {\text{dN}}_{i}=\underline{0}\) .
Figure 10 : Définition des normales
Ainsi, sur la surface latérale d’une poutre, le vecteur contrainte tangentielle \(\tau\) est tangent au contour.
L’équation \(\tau \wedge {\text{dN}}_{i}=\underline{0}\) conduit à une condition que doit respecter \(\varphi\) sur le contour: \(d\varphi =0\)
L’équation [éq] conduit à \({M}_{t}={\int}_{\Omega}-{x}_{2}{\partial}_{2}\varphi -{x}_{3}{\partial}_{3}\varphi \text{ds}\) que l’on peut aussi écrire:
\({M}_{t}=2{\int}_{\Omega}\varphi \text{ds}+{\int}_{\partial \Omega }\varphi ({x}_{3}{\text{dx}}_{2}-{x}_{2}{\text{dx}}_{3})\)
Le problème à résoudre pour obtenir \(\varphi\) est donc:
\(\Delta \varphi =K\) sur \(\Omega\)
\(d\varphi =0\) sur \(\partial \Omega\)
avec la contrainte \({M}_{t}=2{\int}_{\Omega}\varphi \text{ds}+{\int}_{\partial \Omega }\varphi ({x}_{3}{\text{dx}}_{2}-{x}_{2}{\text{dx}}_{3})\)
Il reste à identifier la constante de torsion C. La loi de comportement des poutres en torsion est: \({M}_{t}=\text{CG}\frac{\partial {\theta}_{x}}{\partial x}\) (cf. [§3]).
Pour résoudre plus facilement le problème précédent, on pose \(\psi =\frac{\varphi}{C\frac{\partial {\theta}_{x}}{\partial x}}\) et \(K=-\mathrm{2C}\frac{\partial {\theta}_{x}}{\partial x}\) , le problème à résoudre devient alors:
\(\Delta \psi =-2\) sur \(\Omega\)
\(d\psi =0\) sur \(\partial \Omega\)
\({M}_{t}=-\mathrm{2C}\frac{\partial {\theta}_{x}}{\partial x}\left[{\int}_{\Omega}\psi \text{ds}+{\int}_{\partial \Omega }\psi ({x}_{3}{\text{dx}}_{2}-{x}_{2}{\text{dx}}_{3})\right]\)
Avec une telle notation, on obtient \(C=2{\int}_{\Omega}\psi \text{ds}+{\int}_{\partial \Omega }\psi ({x}_{3}{\text{dx}}_{2}-{x}_{2}{\text{dx}}_{3})\)
Le contour \(\partial \Omega\) est constitué de plusieurs contours: un contour extérieur \(\partial {\Omega}_{0}\) et \(n-1\) contours intérieurs \(\partial {\Omega}_{i}\) . La condition \(d\psi =0\) conduit aux \(n\) conditions suivantes: \(\psi ={\psi}_{i}\) sur \(\partial {\Omega}_{i}\) pour \(i=0,\mathrm{...},n-1\) . Les \({\psi}_{i}\) sont des constantes inconnues. En notant que \(\varphi\) , et donc \(\psi\) , est défini à une constante près, on peut fixer un des \({\psi}_{i}\) . On prendra donc \({\psi}_{0}=0\) . Reste à déterminer \({\psi}_{i}\) pour \(i=0,\mathrm{...},n-1\) .
Pour cela, on va étudier le gauchissement de la section droite d’abscisse \({x}_{1}\) . Rappelons que le tenseur des contraintes s’écrit(cf. [§4]):
\(\sigma =G\frac{\partial {\theta}_{x}}{\partial x}\left[\begin{array}{ccc}0& \frac{\partial \xi }{\partial y}-z& \frac{\partial \xi }{\partial z}+y\\ \frac{\partial \xi }{\partial y}-z& 0& 0\\ \frac{\partial \xi }{\partial z}+y& 0& 0\end{array}\right]\) \(=G\frac{\partial {\theta}_{x}}{\partial x}\left[\begin{array}{ccc}0& \frac{\partial \psi }{\partial z}& -\frac{\partial \psi }{\partial y}\\ \frac{\partial \psi }{\partial z}& 0& 0\\ -\frac{\partial \psi }{\partial y}& 0& 0\end{array}\right]\)
On pose \(\underline{\tau}=\underline{\text{grad}}\psi \wedge {\underline{x}}_{1}\) ; \(\underline{\tau}\) est (à une constante près) la partie tangentielle du vecteur contrainte dans la section droite.
On adonc: \(\underline{\text{grad}}\xi =\underline{\tau}-\underline{\text{GM}}\wedge {\underline{x}}_{1}\)
On fait circuler cette équation le long de \(\partial {\Omega}_{i}\) , on a:
\(0={\oint}_{\partial {\Omega}_{i}}\tau \text{dl}-{\oint}_{\partial {\Omega}_{i}}{x}_{3}{\text{dx}}_{2}-{x}_{2}{\text{dx}}_{3}\)
On s’est servi ici du fait que la circulation du gradient sur une courbe fermée est nulle.
On note que la première intégrale peut s’écrire en terme de flux de \(\psi\) traversant \(\partial {\Omega}_{i}\) . D’autre part, la seconde intégrale est égale à \(\mathrm{2A}(\partial {\Omega}_{i})\) .
Finalement, le problème s’écrit:
\(\Delta \psi =-2\) sur \(\Omega\)
\(\psi =0\) sur \(\partial {\Omega}_{0}\)
\(\psi ={\psi}_{i}\) sur \(\partial {\Omega}_{i}\)
\({\oint}_{\partial {\Omega}_{i}}\frac{\partial \text{y}}{\partial \underline{n}}\text{dl}=\mathrm{2A}(\partial {\Omega}_{i})\)
Une fois résolu ce problème, on a: \(J=2{\int}_{\Omega}\psi \text{ds}+2\sum_{i=1}^{n-1}{\psi}_{i}A(\partial {\Omega}_{i})\)
La dernière condition: \({\oint}_{\partial {\Omega}_{i}}\frac{\partial \text{y}}{\partial \underline{n}}\text{dl}=\mathrm{2A}(\partial {\Omega}_{i})\) est difficile à traiter de façon numérique. En réalité, les deux conditions sur chaque frontière bordant un trou sont écrites:
\(\psi ={\psi}_{i}\) sur \(\partial {\Omega}_{i}\)
\(\frac{\partial \psi }{\partial n}=\frac{\mathrm{2A}(\partial {\Omega}_{i})}{l(\partial {\Omega}_{i})}\)
Formulation variationnelle:
\(\forall v\in {H}^{1}(\Omega )\text{tel que}v{\mid}_{\partial {\Omega}_{0}}=0\)
\(\forall \mu \in {L}^{2}(\partial {\Omega}_{i})\)
\(\lbrace \begin{array}{c}{\int}_{\Omega}\nabla \psi \nabla v\Omega +\sum_{i}{\int}_{\partial {\Omega}_{i}}{\lambda}^{i}v\text{dl}=2{\int}_{\Omega}vd\Omega +\mathrm{2A}(\partial {\Omega}_{i}){\int}_{\partial {\Omega}_{i}}v\text{dl}\\ {\int}_{\partial {\Omega}_{i}}\mu \psi \text{dl}={\psi}_{i}{\int}_{\partial {\Omega}_{i}}m\text{dl}\\ {\int}_{\partial {\Omega}_{i}}{\lambda}^{i}\text{dl}=0\end{array}\)
On considère la fonction \(\theta\) telle que \(\theta \equiv 1\) sur \(\partial {\Omega}_{i}\) . Matriciellement, on a:
\(\psi ={}^{t}\text{}\left[\psi \right]\left[\Phi \right]\)
\(v={}^{t}\left[v\right]\left[\Phi \right]\)
\(\theta ={}^{t}\left[\theta \right]\left[F\right]\)
Où \(\left[\Phi \right]\) est le vecteur dont les composantes sont les fonctions de forme.
Dans ces conditions, l’approximation variationnelle de la formulation faible donne:
\(\lbrace \begin{array}{ccc}\left[K\right]\left[\psi \right]+\sum_{i}{}^{t}\left[{B}^{i}\right]\left[{\lambda}^{i}\right]& =& \left[f\right]+\left[T\right]\\ \left[B\right]\left[\psi \right]& =& \left[0\right]\end{array}\)
Où on a posé:
\({}^{t}\left[f\right]\left[v\right]=2{\int}_{\Omega}vd\Omega\)
\({}^{t}\text{}\left[T\right]\left[v\right]=\frac{\mathrm{2A}(\partial {\Omega}_{i})}{\parallel \partial {\Omega}_{i}\parallel }{\int}_{\partial {\Omega}_{i}}v\text{dl}\)
\(\left[B\right]=\sum_{i}\left[{B}^{i}\right]\)
On peut vérifier que la condition sur le flux est vérifiée:
\(\begin{array}{ccc}{\int}_{\partial {\Omega}_{i}}\frac{\partial \psi }{\partial n}\text{dl}={\int}_{\partial {\Omega}_{i}}\Delta \psi \theta \text{dl}& =& {\int}_{\Omega}\Delta \psi \theta d\Omega +{\int}_{\Omega}\nabla \psi \nabla \theta d\Omega \\ & =& \underset{=0}{\underset{\underbrace{}}{-{\int}_{\Omega}2\theta d\Omega {}^{t}+\left[f\right]\left[\theta \right]}}{}^{t}+\left[T\right]\left[\theta \right]-\underset{=0}{\underset{\underbrace{}}{{}^{t}\left[\theta \right]\left[{B}^{i}\right]}}\left[\lambda \right]\\ & =& \frac{\mathrm{2A}(\partial {\Omega}_{i})}{\parallel \partial {\Omega}_{i}\parallel }{\int}_{\partial {\Omega}_{i}}\theta \text{dl}\\ & =& \mathrm{2A}(\partial {\Omega}_{i})\end{array}\)
On voit, avec cette nouvelle formulation, que le problème mathématique posé revient à un problème de thermique linéaire avec un chargement particulier. Ceci est facilement programmable dans Code_Aster .
En appliquant la méthode précédente à une poutre dont la section droite est la couronne comprise entre les rayons \({R}_{1}\) et \({R}_{0}\) avec \({R}_{1}<{R}_{0}\) .
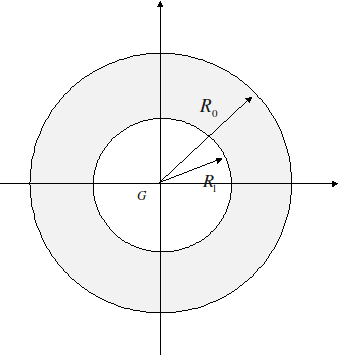
On a le problème suivant à résoudre:
\(\Delta \psi =-2\)
\(\psi (r={R}_{0})={\psi}_{0}=0\)
\(\psi (r={R}_{1})={\psi}_{1}\)
\({\int}_{\partial {\Omega}_{1}}\frac{\partial \psi }{\partial n}\text{dl}=2\pi {R}_{0}^{2}\)
La solution générale du problème s’écrit \(\psi =\psi (r)\text{=-}\frac{{r}^{2}}{2}+A\ln(r)+B\)
Ici, on a \(\frac{\partial \psi }{\partial n}{\mid}_{\partial {\Omega}_{1}}=-\frac{\partial \psi }{\partial r}{e}_{r}\) . D’où \(2\pi {R}_{1}^{2}-2\pi A\ln({R}_{1})=2\pi {R}_{1}^{2}\Rightarrow A=0\) . D’autre part, on a \(\psi ({R}_{0})=0\Rightarrow B=\frac{{R}_{0}^{2}}{2}\) . Finalement:
\(\psi (r)\text{=-}\frac{{r}^{2}}{2}+\frac{{R}_{0}^{2}}{2}\) .
On peut maintenant calculer \(J=2{\int}_{\Omega}\psi \text{ds}+2{\psi}_{1}A(\partial {\Omega}_{i})\) . On a \({\psi}_{1}=-\frac{{R}_{1}^{2}}{2}+\frac{{R}_{0}^{2}}{2}\) et \(A(\partial {\Omega}_{1})=\psi {R}_{1}^{2}\) . Tous calculs faits, on a le résultat classique: \(J=\frac{\pi}{2}({R}_{0}^{4}-{R}_{1}^{4})\)
Détermination de la constante de cisaillement d’une poutre équivalente à un ensemble de poutres parallèles
Position du problème:
On explicite ici une méthode développée dans la commande MACR_CARA_POUTRE pour obtenir les coefficients \(\mathrm{AY}\) et \(\mathrm{AZ}\) d’une poutre équivalente à un ensemble de poutres disjointes (ex. poteaux encastrés entre deux planchers). Ceci permet par exemple de réaliser des modèles «brochettes» de bâtiments, c’est à dire condensés en une seule poutre.
Pour une seule poutre, la définition des coefficients de cisaillement repose sur la méthode énergétique [§2.1.3]: la formulation est basée sur l’énergie complémentaire due au cisaillement dans la section.
Le coefficient de cisaillement est: \(k={\frac{\left[{\int}_{s}{\sigma}_{\text{CT}}\text{dS}\right]}{SG{\int}_{s}\frac{1}{G}{\sigma}_{{\text{CT}}^{2}}\text{dS}}}^{2}\)
Remarque:
Cette expression est valable dans le cas d’une poutre hétérogène ( \(G\) variable).
La répartition de contrainte de cisaillement dans la section, pour une seule poutre, est basée sur la formule de Jourawski, [§2.1.1] qui fournit la répartition des contraintes de cisaillement dues à un effort tranchant dans une direction et seulement la moyenne des cisaillements dans l’autre direction.
La formule de Jourawski s’écrit:
\({\sigma}_{\text{CT}}=\frac{m(y)}{\mathrm{Ib}(y)}V\) avec \(m(y)={\int}_{y}^{{y}_{\max}}t\text{}b(t)\text{}\text{dt}\)
La quantité \(m(y)\) représente le moment statique de la part de section \(A\) comprise entre \(y\) et \({y}_{\max}\)
Alors \(k\) peut s’écrire sous la forme: \(k=\frac{{I}^{2}}{S\text{G}{\int}_{y}^{{y}_{\max}}\frac{{m}^{2}(y)}{{\text{Gb}}^{2}(y)}\text{dy}}\)
L’idée sous-jacente est que la section supporte des contraintes normales issues de la théorie des poutres d’Euler, et que l’on évalue l’effort de glissement de \(A\) sur \(B\) .
Pour une section non connexe, comme la section en coupe d’un bâtiment, l’hypothèse de Jourawski ne peut être faite (sauf à considérer que toute la section se déforme axialement comme une même poutre à chaque abscisse \(x\) ). On ne peut connaître a priori la répartition des cisaillements ni des contraintes normales dans chaque poteau. La figure suivante donne une idée de la vue en coupe d’un bâtiment réacteur:
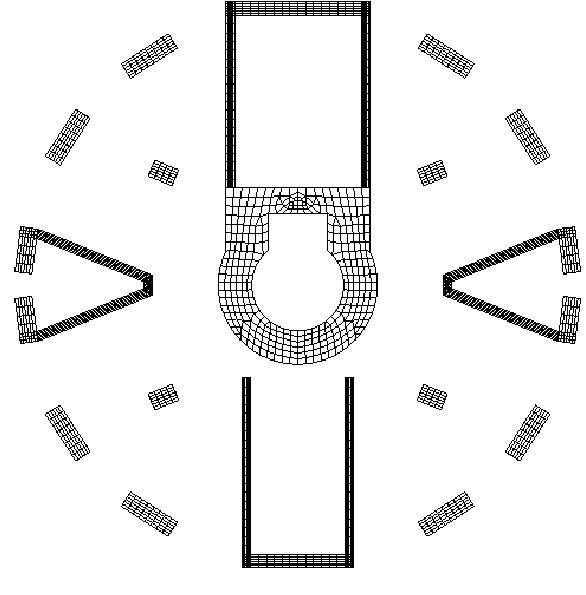
Figure 11 : Section d’un bâtiment réacteur
Expression simplifiée des coefficients de cisaillement
Hypothèse: les poteaux sont encastrés dans les planchers: le bâtiment vu de côté peut se représenter comme un ensemble de poteaux parallèles encastrés entre deux planchers:
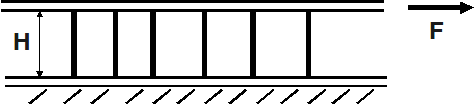
Figure 12 : ensemble de poteaux entre deux planches
On calcule ce cas particulier: chaque poteau est une poutre de section rectangulaire (les axes principaux d’inertie des différents poteaux ne sont pas colinéaires). \(H=3\) à \(\mathrm{4m}\) .
Les poutres sont encastrées aux deux extrémités. Il faut alors chercher une relation entre un effort \(F\) imposé au plancher supérieur, et le déplacement de ce plancher dans la même direction, c’est à dire calculer la rigidité de ce système dans cette direction.
• Pour une poutre:
La méthode utilisée est exposée par exemple dans [bib].
• Poutre encastrée à une extrémité et libre à l’autre:
Le système est isostatique et élastique. On veut exprimer le déplacement \(u(H)\) en fonction de \(F\) et \(\Gamma\) . Le Principe des Travaux Virtuels s’écrit:
\(\begin{array}{}f(H).v(H)=\underset{0}{\overset{H}{\int}}{M}^{f}.\kappa (v)+{V}^{f}.\gamma (v)\mathrm{dl}\\ \kappa (v)=\frac{M(v)}{\mathrm{E.}I}\\ \gamma (v)=\frac{V(v)}{\mathrm{G.}{S}_{r}}\end{array}\)
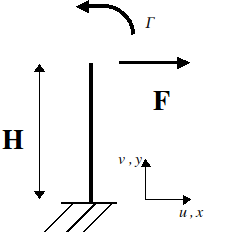
pour tout déplacement virtuel \(v\) , et pour un effort ponctuel \(f\) en \(y=H\) , (ici l’effort normal est nul). On choisit \(f=1\) ,et on calcule successivement les déplacements dus à un effort \(F\) et à un couple \(\Gamma\) en \(y=H\) . En intégrant l’expression précédente, on trouve que, sous l’effet de \(F\) , le déplacement \(u\) réel et la rotation valent: \(u(H)=\frac{F.{H}^{3}}{3E.I}+\frac{F.H}{G.{S}_{r}}=\frac{F.{H}^{3}}{12E.I}(4+\frac{12\text{EI}}{G.{H}^{2}{S}_{r}})\) avec \({S}_{r}=k\cdot S\) et \(\theta (H)=-\frac{F.{H}^{2}}{2E.I}\)
Sous l’effet du moment \(\Gamma\) , on obtient:
\({u}_{\Gamma}(H)=-\frac{\Gamma .{H}^{2}}{2E.I}\) \({\theta}_{\Gamma}(H)=\frac{\Gamma .H}{E.I}\)
Si la poutre a une section rectangulaire de largeur \(b\) et d’épaisseur \(h\) , on obtient: \({S}_{r}=\text{bhk}=\text{bh}\frac{5}{6}\)
pour F imposée: \(u(H)=\frac{F.{H}^{3}}{E.{\text{bh}}^{3}}(4+\frac{12}{5}\frac{{h}^{2}}{{H}^{2}}(1+\nu ))\) \(\theta (H)\text{=-}\frac{6F.{H}^{2}}{E.{\text{bh}}^{3}}\) pour \(\Gamma\) imposé: \({u}_{\Gamma}(H)=-\frac{6\Gamma .{H}^{2}}{E.{\text{bh}}^{3}}\) \({\theta}_{\Gamma}(H)=\frac{12\Gamma .H}{E.{\text{bh}}^{3}}\)
• Poutre encastrée aux deux extrémités: (encastrement glissant en \(y=H\) )
Le système est hyperstatique de degré 1. On exprime le déplacement \(u(H)\) en fonction des inconnues hyperstatiques \(F\) et \(\Gamma\) à l’aide des résultats précédents. Sous l’effet de \(F\) et \(\Gamma\) , le déplacement u réel et la rotation (nulle à cause de l’encastrement) valent:
\(\begin{array}{}u(H)=\frac{F.{H}^{3}}{3\mathrm{E.}I}+\frac{\mathrm{F.}H}{G{S}_{r}}-\frac{\Gamma .\mathrm{H²}}{2\mathrm{E.}I}=\frac{F.{H}^{3}}{\mathrm{E.}b{h}^{3}}(4+\frac{12}{5}\frac{\mathrm{h²}}{\mathrm{H²}}(1+\nu ))\\ 0=-\frac{F.\mathrm{H²}}{2EI}+\frac{\Gamma .H}{\mathrm{E.}I}=-\frac{6F.\mathrm{H²}}{E.bh}+\frac{12\Gamma .H}{E.\mathrm{bh²}}\end{array}\)
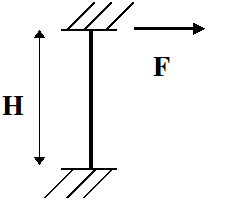
La résolution de ce système permet d’obtenir u(H) en fonction de F:
\(\begin{array}{}u(H)=\frac{F.{H}^{3}}{12\text{EI}}(1+\frac{12\text{EI}}{{\text{GH}}^{2}{S}_{r}})=\frac{F.{H}^{3}}{E.{\text{bh}}^{3}}(1+\frac{12}{5}\frac{{h}^{2}}{{H}^{2}}(1+\nu ))\\ F=(\frac{12\text{EI}}{{H}^{3}}\frac{1}{(1+\frac{12\text{EI}}{{\text{GH}}^{2}{S}_{r}})})u(H)=(\frac{E.{\text{bh}}^{3}}{{H}^{3}}\frac{1}{(1+\frac{12}{5}\frac{{h}^{2}}{{H}^{2}}(1+\nu ))})u(H)=K.u(H)\end{array}\)
On retrouve également ce résultat en considérant la matrice de rigidité d’un élément de poutre «exact» à 2 nœuds ([bib] ou [R3.08.01]). Le terme ci-dessus correspond exactement au terme de rigidité d’effort tranchant seul suivant la direction x:
\({K}_{xx}=(\frac{12\text{EI}}{{H}^{3}}\frac{1}{(1+\Phi )})\Phi =\frac{12\text{EI}}{{\text{GH}}^{2}{S}_{r}}=\frac{12\text{EI}}{{\text{GH}}^{2}\text{kS}}\)
Remarque:
La situation encastré-libre ne diffère que d’un coefficient (4 au lieu de 1),:
\(u(H)=\frac{F.{H}^{3}}{E.{\text{bh}}^{3}}(4+\frac{12}{5}\frac{{h}^{2}}{{H}^{2}}(1+\nu ))\)
Les deux possibilités sont offertes dans MACR_CARA_POUTRE:
les deux extrémités sont encastrées (en réalité l’une est encastrée, l’autre est encastrée dans un plancher mobile: encastrement glissant)
l’extrémité supérieure est libre (en fait en liaison rotulée avec le plancher supérieur).
On peut donc proposer d’exprimer la rigidité à l’effort tranchant de chaque poteau sous la forme:
\(F=(\frac{12\text{EI}}{{H}^{3}}\frac{1}{(\xi +\frac{12\text{EI}}{{\text{GH}}^{2}{S}_{r}})})u(H)=K.u(H)\) avec \(\xi =\lbrace \begin{array}{c}1\text{encastré}-\text{encastré}\\ 4\text{encastré}-\text{libre}\end{array}\)
Pour un ensemble de poutres
La méthode consiste à calculer la rigidité de chaque poteau de la façon précédente, et de comparer la rigidité de l’ensemble à celle d’une poutre équivalente encastrée entre deux planchers. Pour cela on exprime l’effort tranchant global appliqué à l’ensemble des poteaux(par exemple dans la direction \(y\) ):
\({T}_{y}=\sum{T}_{i}={\tilde{K}}_{y}.{u}_{y}\)
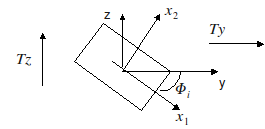
Chaque poteau ayant une orientation quelconque par rapport aux axes globaux, il faut avant tout exprimer les efforts \({T}_{i}\) dans le repère global:
\({x}_{1}\) et \({x}_{2}\) désignant les axes principaux d’inertie du poteau i, l’effort tranchant \({T}_{i}\) dans ce repère est: \(\begin{array}{}{T}_{y}^{i}={T}_{1}^{i}\cos({\varphi}_{i})+{T}_{2}^{i}\sin({\varphi}_{i})\\ {T}_{z}^{i}\text{=-}{T}_{1}^{i}\sin({\varphi}_{i})+{T}_{2}^{i}\cos({\varphi}_{i})\end{array}\) |
|
De plus, on suppose que le déplacement global \(u\) de l’ensemble des poteaux est uniforme (de composantes \({u}_{x}\) et \({u}_{y}\) ) et doit être colinéaire à l’effort tranchant \(T\) . (ce qui n’est pas certain: des couplages sont possibles si il n’y a pas de symétries particulières). Ceci entraîne pour la direction \(y\) :
\(\begin{array}{}{u}_{1}^{i}={u}_{y}\cos({\varphi}_{i})\\ {u}_{2}^{i}={u}_{y}\sin({\varphi}_{i})\end{array}\) et \(\begin{array}{}{T}_{1}^{i}={K}_{1}^{i}.{u}_{1}^{i}\\ {T}_{2}^{i}={K}_{2}^{i}.{u}_{2}^{i}\end{array}\)
on obtient:
\(\begin{array}{}{T}_{y}^{i}=({K}_{1}^{i}{\cos}^{2}({\varphi}_{i})+{K}_{2}^{i}{\sin}^{2}({\varphi}_{i})){u}_{y}^{i}\\ {T}_{y}=\sum{T}_{y}^{i}=\sum({K}_{1}^{i}{\cos}^{2}({\varphi}_{i})+{K}_{2}^{i}{\sin}^{2}({\varphi}_{i})){u}_{y}={\tilde{K}}_{y}{u}_{y}\end{array}\) avec \({\tilde{K}}_{y}=\frac{12\text{EI}}{{H}^{3}}\frac{1}{(\xi +\frac{12\text{EI}}{{\text{GH}}^{2}{S}_{r}})}\)
de mêmedans la direction \(z\) :
\(\begin{array}{}{u}_{1}^{i}=-{u}_{z}\sin({\varphi}_{i})\\ {u}_{2}^{i}={u}_{z}\cos({\varphi}_{i})\end{array}\) donc \({T}_{z}=\sum{T}_{z}^{i}=\sum({K}_{1}^{i}{\sin}^{2}({\varphi}_{i})+{K}_{2}^{i}{\cos}^{2}({\varphi}_{i})){u}_{z}={\tilde{K}}_{z}{u}_{z}\)
D’autre part, pour la poutre équivalente, on fait l’hypothèse que la rigidité à l’effort tranchant s‘exprime de la même façon que celle de chaque poutre:
\({T}_{y}={K}_{{}_{y}}^{\text{eq}}{u}_{y}=\frac{12{\text{EI}}_{z}^{\text{eq}}}{{H}^{3}(1+{\Phi}_{y})}{u}_{y}\text{avec}{\Phi}_{y}=\frac{12{\text{EI}}_{z}^{\text{eq}}}{{S}^{\text{eq}}{H}^{2}{\text{Gk}}_{y}^{\text{eq}}}\)
En fait, il faudrait vérifier que les énergies dues à la flexion et l’effort normal sont bien négligeables. Les deux expressions de l’effort tranchant conduisent à l’expression du coefficient de cisaillement équivalent: \({k}_{y}^{\text{eq}}=\frac{12{\text{EI}}_{z}^{\text{eq}}}{{\text{GS}}^{\text{eq}}{H}^{2}(\frac{12{\text{EI}}_{z}^{\text{eq}}}{{H}^{3}{\tilde{K}}_{y}}-1)}\) et dans la direction \(z\) : \({k}_{z}^{\text{eq}}=\frac{12{\text{EI}}_{y}^{\text{eq}}}{{\text{GS}}^{\text{eq}}{H}^{2}(\frac{12{\text{EI}}_{y}^{\text{eq}}}{{H}^{3}{\tilde{K}}_{z}}-1)}\)
Méthode utilisée dans MACR_CARA_POUTRE
En utilisant les hypothèses décrites précédemment, à savoir:
seule la rigidité dus à l’effort tranchant est prise en compte dans le calcul des coefficients de cisaillement
la poutre équivalente est encastrée sur les deux planchers
deux hypothèses de calcul sont à prévoir concernant chaque poteau (encastré-rotulé et encastré-encastré).
On peut proposer une méthode de calcul dans MACR_CARA_POUTRE pour obtenir des coefficients de cisaillement équivalent à un ensemble de poutres d’axes parallèles, encastrées dans un plancher à une de leurs extrémités, et libres à l’autre, ou bien encastrées à l’autre extrémité.
Restrictions d’utilisation:
il est raisonnable de placer la poutre équivalente sur le centre de gravité de l’ensemble des poteaux, et dans le repère principal d’inertie de l’ensemble, pour éviter les couplages parasites
il faut assurer la continuité de tous les degrés de liberté de la poutre équivalente (translation et rotation) avec les degrés de liberté des planchers (ce qui modélise l’encastrement de la poutre dans le plancher), ce qui impose de modéliser le plancher en éléments de coques ou, s’il est maillée en 3D, de le raccorder à l’aide de poutres ou de plaques.
La méthode de calcul est la suivante:
Pour chaque poteau, faire le calcul habituel par des caractéristiques géométriques et des coefficients de cisaillement de la section, dans le repère principal d’inertie de chaque section (déjà disponible).
Toujours pour chaque section, calcul de la rigidité au cisaillement (l’utilisateur doit fournir H, distance entre planchers.
\(\begin{array}{}{K}_{1}^{i}=\frac{12{\text{EI}}_{2}^{i}}{{H}^{3}(1+{\Phi}_{1})}\text{avec}{\Phi}_{1}=\frac{12{\text{EI}}_{2}^{i}}{{S}^{i}{H}^{2}{\text{Gk}}_{1}^{i}}\\ {K}_{2}^{i}=\frac{12{\text{EI}}_{1}^{i}}{{H}^{3}(1+{\Phi}_{2})}\text{avec}{\Phi}_{2}=\frac{12{\text{EI}}_{1}^{i}}{{S}^{i}{H}^{2}{\text{Gk}}_{2}^{i}}\end{array}\)
Calcul de la rigidité équivalente à l’ensemble des poutres:
\({\tilde{K}}_{y}=\sum({K}_{1}^{i}{\cos}^{2}({\varphi}_{i})+{K}_{2}^{i}{\sin}^{2}({\varphi}_{i}))\)
\({\tilde{K}}_{z}=\sum({K}_{1}^{i}{\sin}^{2}({\varphi}_{i})+{K}_{2}^{i}{\cos}^{2}({\varphi}_{i}))\)
Calcul des coefficients de cisaillement équivalent:
\({k}_{y}^{\text{eq}}=\frac{12{\text{EI}}_{z}^{\text{eq}}}{{\text{GS}}^{\text{eq}}{H}^{2}(\frac{12{\text{EI}}_{z}^{\text{eq}}}{{H}^{3}{\tilde{K}}_{y}}-1)}\)
sachant que \({S}^{\mathrm{eq}}\) , \({I}_{y}^{\mathrm{eq}}\) et \({I}_{z}^{\mathrm{eq}}\) sont déjà calculés par MACR_CARA_POUTRE.
Pour les mots clés de la commande MACR_CARA_POUTRE , il faut que l’utilisateur fournisse \(H\) , par le mot-clé LONGUEUR, les caractéristiques (constantes) du matériau (mot-clé MATERIAU) et choisisse les conditions aux limitespar le mot-clé LIAISON:
LIAISON: ROTULE ou LIAISON: ENCASTREMENT
Ce calcul n’est bien sûr activé que si plusieurs GROUP_MA sont définis par l’utilisateur (indiquant que la section est composée de sous parties disjointes).