v6.05.501 SSNS501 - Grands déplacements d’un panneau cylindrique simplement supporté#
Résumé:
Ce test représente un calcul de stabilité d’un panneau cylindrique simplement supporté soumis à un effort concentré en son centre. Le comportement du panneau change complètement et montre nettement des points de retour en charge et en déplacement «snap-through/snap-back». Dans ce cas un pilotage en déplacement diverge et un pilotage en longueur d’arc doit être choisi.
Il permet de valider la modélisation éléments finis COQUE_3D avec les mailles TRIA7 et QUAD9 et DKT avec les mailles TRIA3 dans le domaine quasi-statique non-linéaire géométrique en présence de fortes instabilités.
Les déplacements et la charge critique sont comparés à une solution de référence numérique.
Solution de référence#
Méthode de calcul utilisée pour la solution de référence#
La solution de référence a été obtenue avec un élément fini de coque DKT24 (maillage 4x6) à 4nœuds avec 6 degrés de liberté par nœud en Formulation Lagrangienne Totale. Cette solution est décrite en détails dans [bib2].
Résultats de référence#
\({W}_{A}\) \(\times {10}^{-\mathrm{3m}}\) |
Charge \(P\) (\(\mathrm{KN}\) ) |
Charge \(P/\mathrm{Pmax}\) |
\({W}_{A}\) \(\times {10}^{-\mathrm{3m}}\) |
Charge \(P\) (\(\mathrm{KN}\) ) |
Charge \(P/\mathrm{Pmax}\) |
\({W}_{A}\) \(\times {10}^{-\mathrm{3m}}\) |
Charge \(P\) (\(\mathrm{KN}\) ) |
Charge \(P/\mathrm{Pmax}\) |
||
0.0 |
0.000 |
0.0000 |
–16.4 |
0.480 |
0.8000 |
–14.0 |
–0.295 |
–0.4916 |
||
–1.7 |
0.150 |
0.2500 |
–16.7 |
0.415 |
0.6916 |
–14.3 |
–0.345 |
–0.5750 |
||
–3.5 |
0.265 |
0.4416 |
–16.9 |
0.350 |
0.5833 |
–15.0 |
–0.370 |
–0.6166 |
||
–4.9 |
0.345 |
0.5750 |
–17.0 |
0.290 |
0.4833 |
–16.1 |
–0.380 |
–0.6333 |
||
–6.8 |
0.410 |
0.6833 |
–17.1 |
0.225 |
0.3750 |
–17.3 |
–0.375 |
–0.6250 |
||
–8.4 |
0.475 |
0.7916 |
–17.1 |
0.150 |
0.2500 |
–18.7 |
–0.350 |
–0.5833 |
||
–9.8 |
0.520 |
0.8666 |
–17.0 |
0.090 |
0.1500 |
–20.3 |
–0.305 |
–0.5083 |
||
–11.1 |
0.555 |
0.9250 |
–16.8 |
0.020 |
0.0333 |
–21.8 |
–0.230 |
–0.3833 |
||
–12.2 |
0.580 |
0.9666 |
–16.4 |
–0.035 |
–0.0583 |
–23.5 |
–0.120 |
–0.2000 |
||
–13.1 |
0.595 |
0.9916 |
–16.0 |
–0.085 |
–0.1416 |
–25.2 |
0.025 |
0.0416 |
||
–14.0 |
0.600 |
1.0000 |
–15.3 |
–0.130 |
–0.2166 |
–26.8 |
0.210 |
0.3500 |
||
–14.9 |
0.585 |
0.9750 |
–14.8 |
–0.155 |
–0.2583 |
–28.5 |
0.445 |
0.7416 |
||
–15.5 |
0.565 |
0.9416 |
–14.2 |
–0.195 |
–0.3250 |
|||||
–16.1 |
0.525 |
0.8750 |
–14.0 |
–0.240 |
–0.4000 |

Incertitudes sur la solution#
Inférieures à 2%, solution numérique
Références bibliographiques#
HAMMADI Fodil: Formulation et évaluation d’éléments finis à continuité C° de la géométrie pour l’analyse linéaire et non-linéaire des coques.
JAAMEI S.,: Etude de différentes formulations lagrangiennes pour l’analyse non linéaire de plaques et coques minces élasto-plastique en grands déplacements et grandes rotations, Thèse de doctorat, Université de Technologie de Compiègne 1986.
Modélisation A#
Caractéristiques de la modélisation#

Caractéristiques du maillage#
Nombre de nœuds : 241
Nombre de mailles et type : 72 TRIA7
Valeurs testées#
Identification |
Instants |
Référence |
Aster |
% différence |
Point limite n°1 |
||||
DZ |
1.03 |
–0.0140 |
–0.01322 |
–5.573 |
Eta_PILOTAGE |
1.03 |
1.0 |
0.9729 |
–2.471 |
Point limite n°2 |
||||
DZ |
1.78 |
–0.0171 |
–0.01696 |
–0.847 |
Eta_PILOTAGE |
1.78 |
0.375 0.250 |
0.07513 |
–75.96 |
Point limite n°3 |
||||
DZ |
2.3 |
–0.0140 |
–0.01458 |
4.176 |
Eta_PILOTAGE |
2.3 |
–0.400 –0.492 |
–0.533 |
19.67 |
Point limite n°4 |
||||
DZ |
2.48 |
–0.0161 |
–0.01617 |
0.452 |
Eta_PILOTAGE |
2.48 |
–0.633 |
–0.6442 |
1.717 |
Remarques#
La stratégie de calcul utilisée se décompose en deux étapes:
calcul en chargement imposéjusqu’à \(P=582.N\) correspondant à 97% de la charge critique,
calcul en « déplacement imposé » : ensuite, on impose un déplacement imposé en utilisant la technique de la longueur d’arc imposée sur toute la structure (option LONG_ARC dans STAT_NON_LINE).
L’utilisation de la technique de longueur d’arc rend difficile la définition de la valeur de référence à introduire dans la commande TEST_RESU, puisque ces valeurs ne peuvent pas être imposées. Pour définir les valeurs de référence, nous avons recherché les valeurs de \(\mathit{DZ}\) les plus proches possibles de celles listées dans le tableau du [§2.2] et nous avons reporté les valeurs du paramètre de pilotage que l’on devait obtenir pour les valeurs de \(\mathit{DZ}\) en question.
Modélisation B#
Caractéristiques de la modélisation#

Caractéristiques du maillage#
Nombre de nœuds : 169
Nombre de mailles et type : 36 QUAD9
Valeurs testées#
Identification |
Instants |
Référence |
Aster |
% différence |
Point limite n°1 |
||||
DZ |
1.03 |
–0.0140 |
–0.01318 |
–5.886 |
Eta_PILOTAGE |
1.03 |
1.0 |
0.9724 |
–2.760 |
Point limite n°2 |
||||
DZ |
–0.0171 |
–0.01702 |
–0.462 |
|
Eta_PILOTAGE |
0.375 0.250 |
0.101 |
–67.69 |
|
Point limite n°3 |
||||
DZ |
–0.0140 |
–0.01446 |
3.269 |
|
Eta_PILOTAGE |
–0.400 –0.492 |
–0.558 |
25.177 |
|
Point limite n°4 |
||||
DZ |
–0.0161 |
–0.0161 |
–0.007 |
|
Eta_PILOTAGE |
–0.633 |
–0.640 |
1.120 |
Remarques#
La stratégie de calcul utilisée se décompose en deux étapes:
calcul en chargement imposéjusqu’à \(P=\mathrm{582.N}\) correspondant à 97% de la charge critique,
calcul en déplacement imposé : ensuite, on impose un déplacement imposé en utilisant la technique de la longueur d’arc imposée (option LONG_ARC dans STAT_NON_LINE).
L’utilisation de la technique de longueur d’arc rend difficile la définition de la valeur de référence à introduire dans la commande TEST_RESU, puisque ces valeurs ne peuvent pas être imposées. Pour définir les valeurs de référence, nous avons recherché les valeurs de \(\mathrm{DZ}\) les plus proches possibles de celles listées dans le tableau du [§2.2] et nous avons reporté les valeurs du paramètre de pilotage que l’on devait obtenir pour les valeurs de \(\mathrm{DZ}\) en question.
Modélisation C#
Caractéristiques de la modélisation#
On teste la modélisation DKT avec des mailles TRIA3. On applique les mêmes conditions aux limites et de symétrie comme dans les modélisations A et B.
Les états successifs d’équilibre sont obtenus grâce à une méthode de pilotage par longueur d’arc.
Dans ce cas, ETA_PILOTAGE= \(\frac{p}{{p}_{max}}\)
Caractéristiques du maillage#
Nombre de nœuds : 121
Nombre de mailles et type : 200 TRIA3
Puisqu’il y a moins de points sur le type de maille TRIA3 par rapport aux TRIA7 et QUAD9, on raffine le maillage (10x10 mailles).
Valeurs testées#
Identification |
Instants |
Référence |
Aster |
% différence |
Point limite n°1 |
||||
DZ |
1.03 |
–0.0131 |
–0.01314 |
0,312 |
Eta_PILOTAGE |
1.03 |
0.9916 |
0.9818 |
0,987 |
Point limite n°2 |
||||
DZ |
1.78 |
–0.0170 |
–0.01704 |
0.208 |
Eta_PILOTAGE |
1.78 |
0.15 |
0.1072 |
28.55 |
Point limite n°3 |
||||
DZ |
2.34 |
–0.0140 |
–0.01435 |
2.511 |
Eta_PILOTAGE |
2.34 |
–0.4000 –0.4916 |
–0.5461 |
11.08 |
Point limite n°4 |
||||
DZ |
2.50 |
–0.0161 |
–0.01584 |
1.606 |
Eta_PILOTAGE |
2.50 |
–0.6333 |
–0.6426 |
1.462 |
Remarques#
La stratégie de calcul utilisée se décompose en deux étapes:
calcul en chargement imposéjusqu’à \(P=\mathrm{582.N}\) correspondant à 97% de la charge critique,
calcul en « déplacement imposé » : ensuite, on impose un déplacement imposé en utilisant la technique de la longueur d’arc imposée sur toute la structure (option LONG_ARC dans STAT_NON_LINE).
L’utilisation de la technique de longueur d’arc rend difficile la définition de la valeur de référence à introduire dans la commande TEST_RESU, puisque ces valeurs ne peuvent pas être imposées. Pour définir les valeurs de référence, nous avons recherché les valeurs de \(\mathrm{DZ}\) les plus proches possibles de celles listées dans le tableau du [§2.2] et nous avons reporté les valeurs du paramètre de pilotage que l’on devait obtenir pour les valeurs de \(\mathrm{DZ}\) en question.
Synthèse des résultats#
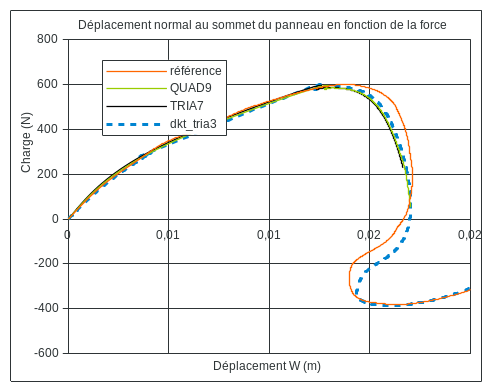
Figure 7-a: Déplacement normal au sommet du panneau en fonction de la force appliquée. Agrandissement autour du point limite 1
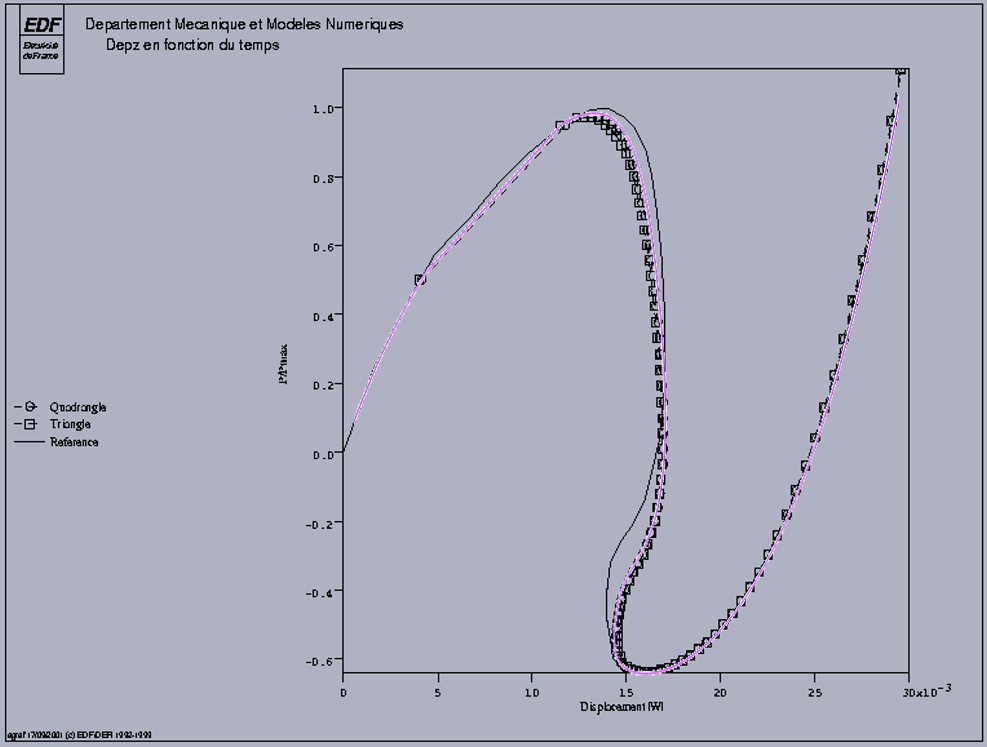
Figure 7-b: Déplacement normal au sommet du panneau en fonction de la force appliquéenormalisée par sa valeur maximale (DKT TRIA3 en violet)
Les résultats de modélisation COQUE_3D pour les deux charges limites 1 et 4 sont corrects. L’erreur maximum est de 2.5% pour la maille TRIA7 et de 2.8% pour la maille QUAD9. Par contre, l’erreur sur le déplacement vertical est plus importante. Elle est de 5.6% pour la maille TRIA7 et de 5.9% pour la maille QUAD9.
Les résultats entre les deux charges limites 1 et 4 sont qualitativement corrects. On détecte bien les points limites 2 et 3. Quantitativement les valeurs des déplacements pour ces points sont bonnes à moins de 1% pour le point limite 2 et à moins de 5% pour le point limite 3. Au niveau des charges correspondantes, la charge au point limite 2 est très fortement sous-estimée (de l’ordre de 70%) et celle au point limite 3 fortement surestimée (de l’ordre de 20%).
Quelle que soit la maille, le comportement pré-flambement est correctement évalué. L’allure en post‑flambement permet de déterminer correctement les déplacements aux points limites 2 et 3. Les charges obtenues sont plus éloignées de la solution de référence. A partir du point limite 4, on retrouve un bon accord entre la référence et notre solution.
Le coefficient de correction du cisaillement transverse A_CIS a été mis à \(0.833\) , correspondant aux coques épaisses. La valeur (\(2500={10}^{6}\times H/L\) ) qui aurait dû être prise en compte ne permet pas d’effectuer les calculs, du fait d’un mauvais conditionnement des matrices de rigidité.
On trouve les mêmes résultats avec la modélisation DKT (mailles TRIA3) comme ceux avec la modélisation COQUE_3D.
On teste également le même calcul avec la modélisation DKTpour les mailles QUAD4. Cependant il converge mal à cause de sa mauvais description pour la coque (courbée).