v6.08.110 SSND110 – Validation des lois monocristallines issues de la Dynamique des Dislocations#
Résumé:
On effectue, sur un problème réduit au point matériel, une validation des lois monocristallines, soit par rapport à une solution analytique, soit avec une référence expérimentale.
Pour toutes les modélisations (sauf C), on teste mono-cristal chargé suivant une orientation particulière, permettant le glissement privilégié d’un seul système, au moins au début du chargement.
Pour la modélisation C, on se réfère à des résultats expérimentaux cités par Julien Schwartz dans sa thèse, ce qui conduit à simuler un essai de traction sur un polycristal constitué de 40 monocristaux dont le comportement est MONO_DD_FAT.
Modélisation A: cette modélisation permet de valider le comportement MONO_DD_CFC
Modélisation B : cette modélisation permet de valider le comportement MONO_DD_CC
Modélisation C : cette modélisation permet de valider le comportement MONO_DD_FAT
Modélisation D : cette modélisation permet de valider le comportement MONO_DD_CC_IRRA
Modélisation E: cette modélisation permet de valider le comportement MONO_DD_CFC_IRRA.
Mod_lisation_B Mod_lisation_C Mod_lisation_D Mod_lisation_E Synth_se_des_r_sultats
Solution de référence#
Solution de référence pour la modélisation A#
Elle s’appuie sur [bib.1] et [R5.03.11]. On trouve une solution analytique sous les hypothèses :
le tenseur des contraintes \(\sigma\) est connu (contraintes imposées sur un point matériel)
la matrice d’interaction \({a}_{ij}\) est composée uniquement de 1.
Pour chaque système de glissement, la scission résolue se calcule par : \({\tau}_{s}=\sigma :{m}_{s}\)
avec \({m}_{s}\) le tenseur d’orientation défini par : \({({m}_{s})}_{ij}=\frac{1}{2}({({n}_{s})}_{i}\cdot {({l}_{s})}_{j}+{({l}_{s})}_{i}\cdot {({n}_{s})}_{j})\) . \({n}_{s}\) désignant la normale au plan de glissement du système \(s\) et \({l}_{s}\) la direction de glissement. L’évolution du glissement plastique est donnée pour chaque système \(s\) par :
\(\dot{{\gamma}_{s}}=\dot{{p}_{s}}\frac{{\tau}_{s}}{∣{\tau}_{s}∣}\) où \(\dot{{p}_{s}}=\dot{{\gamma}_{0}}({(\frac{∣{\tau}_{s}∣}{{\tau}_{f}+{\tau}_{s}^{\mathrm{forest}}})}^{n}-1)\) si \(∣{\tau}_{s}∣\ge {\tau}_{0}+{\tau}_{s}^{f}\) , sinon \(\dot{{p}_{s}}=0\)
avec \({\tau}_{s}^{\mathrm{forest}}(\omega )=\mu C(\omega )\sqrt{\sum_{j=1,12}{a}_{\mathrm{sj}}\langle {\omega}_{j}\rangle }\) où \({\omega}_{s}\) est relié à la densité de dislocation \({\rho}_{s}\) par : : \({\omega}_{s}={b}^{2}\ast {\rho}_{s}\) . \({\tau}_{s}\) étant connu, \(\dot{{\gamma}_{s}}\) est donc uniquement fonction de \({\omega}_{s}\) .
L’évolution de \({\omega}_{s}\) est donnée par l’équation différentielle : \(\dot{{\omega}_{s}}=\dot{{p}_{s}}{h}_{s}(\langle \omega \rangle )\) avec \({h}_{s}(\omega )=(A\frac{\sum_{j\in \mathrm{forest}(s)}\sqrt{{a}_{\mathrm{sj}}}\langle {\omega}_{j}\rangle }{\sum_{j=1,12}\sqrt{{a}_{\mathrm{sj}}\langle {\omega}_{j}\rangle }}+BC(\omega )\sum_{j\in \mathrm{copla}(s)}\sqrt{{a}_{\mathrm{sj}}\langle {\omega}_{j}\rangle }-\frac{y}{b}\langle {\omega}_{s}\rangle )\)
\(C(\omega )=0.2+0.8\frac{\ln(\alpha \sqrt{\sum_{i=1,12}\langle {\omega}_{i}\rangle })}{\ln(\alpha b\sqrt{{\rho}_{\mathrm{ref}}})}\) .
Pour l’orientation choisie, soit \(\text{1-5-9}\) , les facteurs de Schmid, reliant le tenseur des contraintes aux différentes scissions résolues \({\tau}_{s}\) sont , pour les 12 systèmes octaédriques du \(\text{CFC}\) [R5.03.11] : \(\begin{array}{c}[0.45784855,0.22892428,0.22892428,0.15261618,0.26707832,0.11446214,\\ \text{}0.19840104,0.29760156,0.4960026,0.04578486,0.11446214,0.16024699]\end{array}\)
On constate donc que le premier système de glissement activé sera le numéro 9 (\(\text{A3}\) ), et le deuxième sera le numéro 1 (soit \(\text{B4}\) ). Les scissions résolues pour ces deux systèmes sont :
système \(\text{A3}\) (numéro 9) : \({\tau}_{s}=49,6\mathit{MPa}\)
système \(\text{B4}\) (numéro 1) : \({\tau}_{s}=45,785\mathrm{MPa}\)
Pour ces deux systèmes, \({\tau}_{s}\) étant connu, il suffit de résoudre l’équation différentielle \(\dot{{\omega}_{s}}=\dot{{p}_{s}}{h}_{s}(\langle \omega \rangle )\) pour connaître l’ensemble des variables. Ceci est effectué numériquement, à l’aide du module «odeint» de scipy (voir fichier SSND110A.22).
Solution de référence pour la modélisation B#
Dans le cas du \(\text{CC}\) , pour l’orientation choisie, soit \(\text{1-5-9}\) , le premier système de glissement (famille CUBIQUE) activé sera le numéro 8, et le deuxième sera le numéro 5. Les scissions résolues pour ces deux systèmes sont (à une température de 300K):
système numéro 8 : \({\tau}_{s}=49,6\mathrm{Mpa}\)
système numéro 5 : \({\tau}_{s}=45,785\mathrm{MPa}\)
Solution de référence pour la modélisation C#
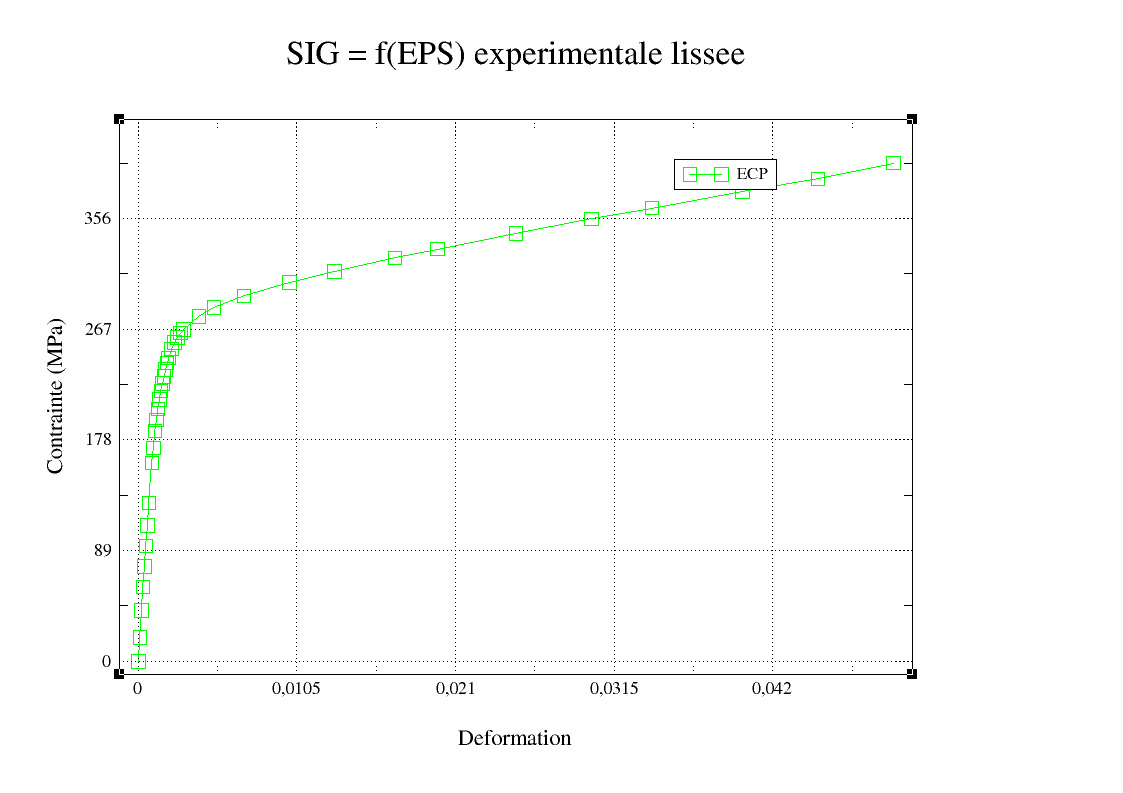
Les données expérimentales sont résumées par la courbe lissée ci-dessous :
Pour plus de précision, on pourra se reporter à [2] et [3].
Solution de référence pour la modélisation D#
La validation consiste à vérifier que les systèmes de glissement activés sont bien ceux qui sont attendus, et de comparer les résultats entre les intégrations explicite et implicite.
Solution de référence pour la modélisation E#
La validation consiste à vérifier que la courbe contrainte-déformation obtenue avec irradiation présente bien un sur-écrouissage par rapport au cas non irradié, puis un adoucissement.
Références bibliographiques#
[1] N.Rupin Note EDF-R&D : HT24-2010-01128-en «implementation of a new constitutive law based on dislocation dynamics for fcc materials»
[2] J.M. Stephan Note EDF-R&D : HT24-2010-01329-FR «Projet ANR AFGRAP – Courbes de traction monotones et cycliques moyennes de l’acier AISI 316LN (Tole T252) fourni par AREVA»
[3] J. Schwartz : «Approche non locale en plasticité cristalline : application à l’étude du comportement mécanique de l’acier AISI 316LN en fatigue oligocyclique». Thèse de l’Ecole Centrale de Paris, Juin 2011.
[4] G.Monnet : “Crystal plasticity constitutive law for irradiated RPV steel” Note EDF R&D H-T27-2011-02738-EN, Décembre 2011.
Modélisation A#
Caractéristiques de la modélisation#
Un point matériel de comportement DD_CFC, comportant 12 systèmes de glissement (famille OCTAEDRIQUE) est sollicité à contrainte imposée.
Grandeurs testées et résultats#
Valeurs testées#
Intégration RUNGE_KUTTA
Variable |
Instants \((s)\) |
Référence |
Tolérance% |
\({\rho}_{9}\) |
1 |
7.17E-09 |
0,1 |
\({\rho}_{1}\) |
1 |
6.608E-09 |
0,1 |
\({\gamma}_{9}\) |
1 |
8.00E-05 |
0,1 |
\({\gamma}_{1}\) |
1 |
1.72E-05 |
0,2 |
\({\varepsilon}_{xx}^{\mathrm{vp}}\) |
1 |
-3.97E-05 |
0,1 |
\({\varepsilon}_{xx}^{\mathrm{vp}}\) |
1 |
3.97E-05 |
0,1 |
\({\varepsilon}_{xx}^{\mathrm{vp}}\) |
1 |
1.81E-05 |
0,1 |
\({\varepsilon}_{xx}^{\mathrm{vp}}\) |
1 |
2.81E-05 |
0,1 |
Intégration IMPLICITE
Variable |
Instants \((s)\) |
Référence |
Tolérance% |
\({\rho}_{9}\) |
1 |
7.17E-09 |
0,5 |
\({\rho}_{1}\) |
1 |
6.608E-09 |
0,1 |
\({\gamma}_{9}\) |
1 |
8.00E-05 |
1 |
\({\gamma}_{1}\) |
1 |
1.72E-05 |
2 |
\({\varepsilon}_{xx}^{\mathrm{vp}}\) |
1 |
-3.97E-05 |
1 |
\({\varepsilon}_{xx}^{\mathrm{vp}}\) |
1 |
3.97E-05 |
1 |
\({\varepsilon}_{xx}^{\mathrm{vp}}\) |
1 |
1.81E-05 |
1 |
\({\varepsilon}_{xx}^{\mathrm{vp}}\) |
1 |
2.81E-05 |
1 |