r7.10.01 Dépouillement des réponses aléatoires#
Résumé :
L’introduction d’une “approche stochastiquedu calcul sismique” pour résoudre un problème de mécanique vibratoire sous excitation aléatoire nécessite un post-traitement particulier.
La commande POST_DYNA_ALEA [U4.76.02] permet, à partir de la densité spectrale de puissance d’un interspectre-réponse, d’évaluer son écart-type, sa fréquence apparente, la distribution de ses pics. Elle permet également, dans une première approche, de calculer la fonction de Vanmarcke utile dans le cas d’une analyse sismique.
NB:
Cette commande permet également d’effectuer les estimations statistiques pour tout type d’interspectre de réponse à une excitation aléatoire non nécessairement sismique (par exemple : effet de la houle ou d’un écoulement turbulent).
Table des matières
Spectre - Interspectre - Matrice Interspectrale#
Traitement du signal - Conventions retenues#
Introduction#
Un signal peut avoir deux représentations : une représentation temporelle de la forme \(x=f(t)\) ou une représentation fréquentielle de la forme \(X=F(f)\) . Ces deux représentations sont reliées entre elles par la Transformation de Fourier.
Il existe dans le domaine numérique et dans le domaine expérimental différentes manières de calculer les grandeurs spectrales relatives à un signal temporel \(x(t)\) (représentation dimensionnelle ou non, facteur 1/2 ou non pour la Transformation de Fourier).
Or, si les différentes définitions de la DSP (cf. [§2.2.2] et [Annexe1]) à partir de la Transformation de Fourier du signal ne changent rien au calcul effectué par CALC_INTE_SPEC [U4.56.03], il importe en revanche, dans les calculs effectués par l’opérateur de post-traitement POST_DYNA_ALEA, que les données soient cohérentes pour que les résultats produits par cet opérateur soient à la dimension physique du signal de départ.
Il est également nécessaire de savoir, pour une comparaison quantitative entre calcul et expérience, quelles sont les conventions adoptées pour le calcul des quantités spectrales. L’ensemble de ces conventions est rappelé dans [Annexe1] pour chaque type de signaux. Nous ne redonnons ici que les formules générales.
Transformation de Fourier#
Pour la Transformation de Fourier en fréquence \((f)\) d’un signal (d’unité u) , exprimée en u/Hz nous adoptons la définition suivante : \(X(f)=\underset{-\infty }{\overset{+\infty }{\int}}x(t){e}^{-2i\pi \text{ft}}\text{dt}\)
La transformation inverse s’exprime alors par : \(x(t)=\underset{-\infty }{\overset{+\infty }{\int}}X(f){e}^{+2i\pi \text{ft}}\text{df}\)
On peut aussi exprimer la Transformation de Fourier en pulsation \((\omega =2\pi f)\) , par la définition suivante:
\({X}^{p}(\omega )=\frac{1}{2\pi }\underset{-\infty }{\overset{+\infty }{\int}}x(t){e}^{-i\omega t}\text{dt}\)
La transformation inverse s’exprime par : \(x(t)=\underset{-\infty }{\overset{+\infty }{\int}}{X}^{p}(\omega ){e}^{+i\omega t}d\omega\)
Ce qui mène à l’équivalence : \({X}^{p}(\omega )={X}^{p}(2\pi f)=\frac{1}{2\pi }X(f)\)
Notion de Puissance - Densité Spectrale de Puissance#
Puissance d’un signal - Spectre de Puissance d’un signal#
Tout comme le signal lui-même, la puissance du signal peut être exprimée en fonction du temps ou de la fréquence:
la puissance temporelle instantanée est simplement appelée puissance:
\(p(t)=x(t).\text{x*}(t)\)
où \(\text{x*}(t)\) est la quantité complexe conjuguée de \(x(t)\) .
la puissance fréquentielle est communément appelée densité spectrale de puissance ou spectre:
\(\underline{{S}_{xx}(f)=X(f).\text{X*}(f)={\mid X(f)\mid }^{2}}\)
Cette définition n’est possible que lorsque la transformée de Fourier du signal existe.
On peut alors exprimer l’énergie totale du signal par \(E=\underset{-\infty }{\overset{+\infty }{\int}}{S}_{xx}(f)\text{df}=\underset{-\infty }{\overset{+\infty }{\int}}{\mid X(f)\mid }^{2}\text{df}\)
L’expression de cette DSP pour les différents types de signaux est donnée en [Annexe1]. On verra ultérieurement [§3.3] une autre définition - équivalente d’après le théorème de Wiener‑Kinchine - mais plus générale, de la densité spectrale de puissance basée sur l’approche statistique.
Puissance d’interaction - Densité spectrale d’interaction de deux signaux - Interspectre#
On définit aussi la puissance instantanée d’interaction de deux signaux \(x(t)\text{et}y(t)\) :
\(\begin{array}{}{p}_{xy}(t)=x(t).\text{y*}(t)\text{et}{p}_{yx}(t)=\text{x*}(t).y(t)\\ \text{reliées par}{p}_{xy}(t)={p}_{yx}\ast (t)\end{array}\)
Si les deux signaux admettent une transformée de Fourier \(X(f)\text{et}Y(f)\) , on peut exprimer la puissance fréquentielle d’interaction ou interspectre par \({S}_{\text{XY}}(f)=X(f).\text{Y*}(f)\)
Si les deux signaux sont réels alors la puissance d’interaction \({p}_{xy}(t)={p}_{yx}(t)=x(t).y(t)\) est réelle. Mais il n’y a aucune raison pour que \({S}_{\text{XY}}(f)\) soit aussi réelle ; en revanche \({S}_{\text{XY}}(f)\) est complexe à symétrie hermitienne, à savoir:
partie réelle paire et partie imaginaire impaire ou module pair et phase impaire
Si \(X(f)=Y(f)\) , on parle alors d’ autospectre.
Matrice interspectrale#
Une matrice interspectrale d’ordre \(N\) est une matrice \(N\times N\) complexe, dont chaque terme dépend de la fréquence sous la forme d’une fonction de \(f\) . Les termes diagonaux sont les autospectres, les termes extra-diagonaux sont les interspectres entre les points considérés (chaque ligne ou colonne représentant un point en maillage physique ou un mode en calcul modal). Les interspectres manipulés en pratique étant hermitiens, seuls les \(\frac{N(N+1)}{2}\) termes de la triangulaire supérieure (ou inférieure) sont suffisants pour définir complètement la matrice interspectrale.
Implantation dans Code_Aster#
Les matrices interspectrales manipulées par l’opérateur POST_DYNA_ALEA sont constituées de fonctions complexes de la fréquence : \({S}_{\text{XY}}(f)\) .
Ces matrices sont stockées dans des tables de concept interspectre.
Rappels sur les lois statistiques [bib4]#
Définitions#
\(t\) paramètre discret \({({t}_{n})}_{n=\text{1,N}}\) ou continu (le temps ou une variable d’espace).
\(X(t)\) processus aléatoire.
A chaque instant \({t}_{n}\) est associée une variable aléatoire \({X}_{n}\) , variable aléatoire de réalisation \({x}_{n}\) .
Alors \(x(t)={({x}_{n}=x({t}_{n}))}_{n=1\text{,N}}\) est une réalisation du processus \(X(t)\) , processus constitué de \(N\) variables aléatoires a priori indépendantes.
Chaque variable \({X}_{n}\) est caractérisée par sa fonction de répartition \({F}_{n}({\text{x,t}}_{n})=\text{Prob}({X}_{n}\le x)\) ou par sa densité de probabilité \(p({\text{x,t}}_{n})=\frac{\partial {F}_{n}}{\partial x}({\text{x,t}}_{n})\) .
Le processus aléatoire est aussi caractérisé par ses fonctions moments , les deux premiers moments ont une importance particulière. Il s’agit de l’espérance mathématique ou moyenne \(m(t)\) notée aussi \(E\left[X(t)\right]\) et pour tout couple \(({t}_{1},{t}_{2})\) de la fonction d’autocorrélation \(R({t}_{1},{t}_{2})\) ou \({R}_{\text{XX}}({t}_{1},{t}_{2})\) notée aussi \(E\left[X({t}_{1})X({t}_{2})\right]\) .
\(\begin{array}{}m(t)=E\left[X(t)\right]=\int\mathrm{xp}(x,t)\text{dx}\\ {R}_{\text{XX}}({t}_{1},{t}_{2})=E\left[X({t}_{1})X({t}_{2})\right]=\int\int{x}_{1}{x}_{2}p({x}_{1},{t}_{1};{x}_{2},{t}_{2}){\text{dx}}_{1}{\text{dx}}_{2}\end{array}\)
On définit aussi une fonction d’intercorrélation pour deux processus \(X(t)\text{et}Y(t)\) .
\({R}_{\text{XY}}({t}_{1},{t}_{2})=E\left[X({t}_{1})Y({t}_{2})\right]=\int\int{x}_{1}{y}_{2}p({x}_{1},{t}_{1};{y}_{2},{t}_{2}){\text{dx}}_{1}{\text{dy}}_{2}\)
L’“étalement” du processus est caractérisé par la variance :
\({\sigma}^{2}(t)=E\left[{(X(t)-\mu (t))}^{2}\right]\)
Pour un processus à moyenne nulle (\(\mu\) = 0.), la variance qui caractérise alors l’“intensité du phénomène” (carré de l’écart type ou valeur quadratique moyenne) est égale à la fonction d’autocorrélation au temps \(t={t}_{1}={t}_{2}\) :
\({\sigma}^{2}(t)=E\left[X(t)X(t)\right]={R}_{\text{XX}}(\text{t,t})=\int{x}^{2}p(x,t)\text{dx}\)
Hypothèses en dynamique aléatoire#
Très classiquement plusieurs hypothèses sont posées dans le cadre de la dynamique aléatoire. On admet ainsi que les processus étudiés sont stationnaires, à moyenne nulle et ergodiques .
Processus stationnaires à moyenne nulle - variance#
Un processus est dit stationnaire si l’ensemble de ses “caractéristiques probabilistes” est invariant lors d’une translation \({t}_{0}\) du paramètre \(t\) . Ce qui implique:
\(\begin{array}{}\mu (t)=\text{Cte}\\ {R}_{\text{XX}}({t}_{1},{t}_{2})={R}_{\text{XX}}({t}_{2}-{t}_{1})={R}_{\text{XX}}(\tau )={R}_{\text{XX}}(-\tau )\end{array}\)
Pour un processus à moyenne nulle \({\sigma}^{2}={R}_{\text{XX}}(0)\) .
Ergodicité#
Cette notion provient d’un raisonnement de Gibbs (1839-1903) pour lequel le temps d’observation d’un phénomène physique peut être considéré comme infini devant l’échelle de temps au niveau moléculaire. Le système passe alors par tous les états possibles en restant le plus longtemps possible, ou en passant le plus souvent, dans les états qui sont le plus probables, de telle sorte que la moyenne temporelle devient égale à la moyenne statistique sur les états , c’est-à-dire l’espérance mathématique. Ceci se prolonge pour les fonctions de corrélation et d’intercorrélation.
\(\begin{array}{}\mu =\underset{T\to +\infty }{\lim}\frac{1}{T}\underset{-T/2}{\overset{+T/2}{\int}}x(t)\text{dt}\\ {R}_{\text{XX}}(t)=\underset{T\to +\infty }{\lim}\frac{1}{T}\underset{-T/2}{\overset{+T/2}{\int}}x(t-\tau )x(t)\text{dt}\end{array}\)
Remarque:
Pour la suite du document on supposera que le processus aléatoire est stationnaire à moyenne nulle. L’ensemble des développements effectués dans Code_Aster vérifie ces hypothèses.
Densité spectrale de puissance#
Dans le cadre de cette approche statistique, on peut donner une définition très générale de la densité spectrale de puissance ou DSP. On retiendra pour Code_Aster les définitions suivantes exprimées en fréquence ou en pulsation:
\(\begin{array}{}{S}_{\text{XX}}(f)=\underset{-\infty }{\overset{+\infty }{\int}}{R}_{\text{XX}}(\tau ){e}^{-\mathrm{2i}\pi f\tau }d\tau ;{G}_{\text{XX}}(f)=\underset{0.}{\overset{+\infty }{\int}}{R}_{\text{XX}}(\tau ){e}^{-\mathrm{2i}\pi f\tau }d\tau \\ {S}^{{p}_{\text{XX}}}(\omega )=\frac{1}{2\pi }\underset{-\infty }{\overset{+\infty }{\int}}{R}_{\text{XX}}(\tau ){e}^{-i\omega \tau }d\tau ;{G}^{{p}_{\text{XX}}}(\omega )=\frac{1}{2\pi }\underset{0.}{\overset{+\infty }{\int}}{R}_{\text{XX}}(\tau ){e}^{-i\omega \tau }d\tau \end{array}\)
qui conduisent aux relations suivantes : \(\begin{array}{}{G}^{{p}_{\text{XX}}}(\omega )=\frac{1}{2\pi }{G}_{\text{XX}}(f)\\ {S}_{\text{XX}}(f)=2{G}_{\text{XX}}(f){S}_{\text{XX}}^{p}(\omega )=2{G}^{{p}_{\text{XX}}}(\omega )\end{array}\)
On peut démontrer que \({G}_{\text{XX}}(f)\) , qui est égale à la Transformation de Fourier de \({R}_{\text{XX}}(t)\) , est réelle, positive. On se reportera à [Annexe1] qui contient toutes les conventions adoptées pour assurer la cohérence des résultats.
Moments spectraux#
On appelle moments spectraux les quantités suivantes (que l’on a définies en pulsation):
\({\lambda}_{i}=\underset{-\infty }{\overset{+\infty }{\int}}{\mid \omega \mid }^{i}{S}^{{p}_{\text{XX}}}(\omega )d\omega =\underset{-\infty }{\overset{+\infty }{\int}}{\mid \omega \mid }^{i}{S}_{\text{XX}}(f)\text{df}\)
On a en particulier : \({\lambda}_{0}={\sigma}^{2}{\lambda}_{2}={\sigma}_{\dot{X}\dot{X}}^{2}{\lambda}_{4}={\sigma}_{\ddot{X}\ddot{X}}^{2}\) qui sont les écarts type de \(X\) et de ses premières dérivées.
Ces moments sont systématiquement calculés jusqu’à l’ordre 4; à l’aide du mot-clé MOMENT il est possible de demander le calcul des modes supérieurs. Dans Code_Aster , le calcul est effectué pour une DSP exprimée en fonction de la fréquence \(f\) .
Les mesures de dépassement de seuil et la fiabilité#
Les méthodes classiques ne permettent d’accéder qu’au maximum du déplacement (ou de l’accélération) par sommation “adaptée” des maximums sur chaque mode. L’intérêt essentiel de l’approche stochastique du calcul vibratoire aléatoire réside dans la connaissance statistique de la réponse de la structure qui peut donc être convertie en une information statistique de la fiabilité. A ce titre, deux modes de ruine peuvent être pris en considération:
la ruine par dépassement de seuil : ce type de ruine survient lorsque la réponse du système dépasse une valeur limite. Cela revient à chercher la probabilité que les valeurs du processus restent en dessous d’une valeur seuil durant la durée d’observation T. Le facteur de pic ( peak factor) permet d’estimer, de manière approchée, le maximum moyen, sur une durée d’observation du signal.
la ruine par fatigue ou accumulation de dommages.
Cette seconde approche pourra aussi être traitée à partir des premiers éléments statistiques calculés dans POST_DYNA_ALEA. Elle est réalisée dans la commande POST_FATI_ALEA [U4.67.05] [R7.04.02].
Dans le cadre des études sous excitations sismiques, nous nous intéressons essentiellement au problème de dépassement de seuil. D’où dans un premier temps le calcul d’un certain nombre de paramètres statistiques qui permettent de caractériser le signal à étudier (moments spectraux et formules de Rice [§4.1]), munis de ces caractéristiques nous pourrons alors estimer les probabilités de dépassement de seuil à l’aide de modèles classiques de probabilité [§4.2], ainsi qu’un critère de fiabilité (loi de Vanmarcke [§4.3]).
Moments spectraux et paramètres caractéristiques#
Les moments spectraux sont définis par : \({\lambda}_{i}=\underset{-\infty }{\overset{+\infty }{\int}}{\mid \omega \mid }^{i}{S}_{\text{XX}}(f)\text{df}\)
L’ensemble infini de ces moments spectraux caractérisent parfaitement l’interspectre et permettent ainsi d’établir un certain nombre de résultats numériques. Dans le cas particulier d’un oscillateur à 1 ddl ou d’un signal à un seul pic, les trois premiers moments spectraux suffisent à retrouver l’autospectre \({S}_{\text{XX}}\) . C’est le cas que nous retenons dans Code_Aster puisqu’il est supposé que les valeurs sont distribuées suivant une loi de GAUSS.
Formules de Rice#
Pour un signal aléatoire tel que défini précédemment:: stationnaire à moyenne nulle (centré) et ergodique, on suppose de plus que les valeurs mesurées sont distribuées selon une loi normaleprofil de type Gauss (cf. [§4.2.1]).
L’analyse d’un chargement aléatoire gaussien stationnaire présente l’avantage de conduire à des expressions analytiques simples - connues sous le nom de formules de Rice - et de représenter de nombreux phénomènes réels.
Les paramètres statistiques suivants sont obtenus à partir des différents moments spectraux reliés aux différentes dérivées de \(X\) (cf. [§3.4]):
Ecart-type : \({\sigma}_{X}=\sqrt{{\lambda}_{0}}\)
Remarque:
Si seule la partie positive du spectre est fournie, Code_Aster multiplie par 2 le 1ermoment spectral \({\sigma}_{X}=\sqrt{{\mathrm{2\lambda }}_{0}}\) .
Un extremum (maximum ou minimum) d’amplitude \(X\) est défini par la probabilité d’avoir une dérivée nulle \(\dot{X}=0\) associée à une dérivée seconde \(\ddot{X}\) quelconque.
Nombre moyen d’extrema par seconde: \({N}_{e}=\frac{1}{\pi}\frac{{\sigma}_{\ddot{X}}}{{\sigma}_{\dot{X}}}=\frac{1}{\pi}\sqrt{\frac{{\lambda}_{4}}{{\lambda}_{2}}}\)
Le dépassement d’un niveau \({X}_{0}\) est défini par la probabilité d’avoir \(X={X}_{0}\) avec une pente \(\dot{X}\) quelconque : on compte donc les passages de ce niveau avec les pentes positives et négatives. Compte tenu des hypothèses de lois gaussiennes, le nombre de passage par \({X}_{0}\) et par seconde s’exprime par : \({N}_{{X}_{0}}=\frac{1}{\pi}\frac{{\sigma}_{\dot{X}}}{{\sigma}_{X}}{e}^{-\frac{{X}_{0}^{2}}{2{\sigma}_{X}^{2}}}\)
Ce qui conduit aux expressions suivantes:
Nombre de dépassements de niveau avec pente positive par seconde : \({N}_{{{X}_{0}}^{+}}=\frac{1}{2}{N}_{{X}_{0}}\)
Nombre de passages par zéro (\({X}_{0}\) = 0) par seconde : \({N}_{0}=\frac{1}{\pi}\frac{{\sigma}_{\dot{X}}}{{\sigma}_{X}}=\frac{1}{\pi}\sqrt{\frac{{\lambda}_{2}}{{\lambda}_{0}}}\)
Nombre de passages par zéroavec pente positive par seconde :
\({N}_{{0}^{+}}=\frac{1}{2}{N}_{0}=\frac{1}{2\pi }\sqrt{\frac{{\lambda}_{2}}{{\lambda}_{0}}}\)
\({N}_{{0}^{+}}\) représente une fréquence statistique moyenne de passage par zéro avec pente positive.
Dans le cas d’un signal “simple”, c’est-à-dire avec un seul pic , \({N}_{{0}^{+}}\) , nombre de passages par zéro peut être assimilé à une fréquence apparente aussi notée \({f}_{e}\) . Dans le cas beaucoup plus général d’un signal quelconque, l’interprétation physique de la valeur \({N}_{{0}^{+}}\) est davantage sujette à caution !
Le facteur d’irrégularité traduit l’allure fréquentielle du signal. Compris entre 0 et 1, il tend vers 1 lorsque le processus est à bande étroite, en revanche il tend vers 0 pour un processus large bande. Son expression est:
\(I=\frac{{N}_{0}}{{N}_{e}}=\frac{{\sigma}_{\dot{X}}^{2}}{{\sigma}_{X}{\sigma}_{\ddot{X}}}=\sqrt{\frac{{\lambda}_{2}^{2}}{{\lambda}_{0}{\lambda}_{4}}}\)
Les trois paramètres - \({N}_{0},{N}_{e},I\) - caractérisent en totalité le signal. On peut, en particulier, estimer le nombre moyen de pics positifs par seconde : \({N}_{{\text{pic}}^{+}}=1/4(1+I){N}_{e}\) .
L’ensemble de ces paramètres est calculé et stocké dans une table « imprimable » sur le fichier RESULTAT à l’aide de la commande IMPR_TABLE.
Distributions des pics positifs#
Une des connaissances principales intéressant les concepteurs de structures à partir de sa réponse estimée à une excitation aléatoire est la détermination des dépassements de seuil et en particulier les probabilités de dépassements de certains seuils critiques.
Les formules de Rice (paragraphe précédent) permettent de connaître le taux moyen des franchissements de certains niveaux. L’approche suivante permet de donner une loi de probabilité de présence de tel ou tel pic. On s’intéresse donc aux maxima positifs de la réponse.
Un maximum se produit quand \(\dot{x}(t)=0\text{avec}\ddot{x}(t)<0\) . On s’intéresse donc à la densité de probabilité conjointe \(p(x,\dot{x}=0,\ddot{x},t)\text{de}X(t),\dot{X}(t),\ddot{X}(t)\) . (Il faut donc que le processus soit deux fois dérivable, ce qui est acquis lorsque l’on admet une répartition gaussienne du signal.)
Cette densité de probabilité des pics positifs permet par exemple de calculer la proportion de pics compris entre a et b (ou la probabilité que le prochain pic soit compris entre a et b) qui vaut:
\({\int}_{a}^{b}p(x,0,\ddot{x},t)\text{dx}\)
Le signal étant gaussien stationnaire, centré par rapport à sa valeur moyenne (nulle en analyse sismique), la distribution des pics est symétrique par rapport à cette moyenne. On s’intéresse donc à la répartition des pics positifs . Dans le cas général, la distribution des pics d’amplitude \(X\) positive s’écrit sous la forme [bib5]:
\(\begin{array}{}{p}_{\text{pic}}^{+}(X)=\frac{2}{\sqrt{2\pi }{\sigma}_{X}(1+I)}\left[\sqrt{1-{I}^{2}}{e}^{\frac{{X}^{2}}{2{\sigma}_{X}^{2}(1-{I}^{2})}}+\frac{IX}{{\sigma}_{X}}{e}^{\frac{{X}^{2}}{2{\sigma}_{X}^{2}}}{\int}_{-\infty }^{\alpha}{e}^{\frac{-{t}^{2}}{2}}\mathrm{dt}\right]\\ \text{Si}X<0\text{alors}{p}_{\text{pic}}^{+}(X)=0\text{avec}\lbrace \begin{array}{}I=\frac{{\sigma}_{\dot{X}}^{2}}{{\sigma}_{X}{\sigma}_{\ddot{X}}}\\ \alpha =\frac{X}{{\sigma}_{X}}\frac{I}{\sqrt{1-{I}^{2}}}\end{array}\end{array}\)
Il s’agit de la formule aussi connue sous le nom de LONGUET-HIGGINS [bib6]. Nous présentons, ci après, la représentation graphique de cette formule pour 4 valeurs de \(I\) .

Figure 4.2-a : Distribution de pics d’amplitude positive normalisée par rapport à l’écart-type du signal
Cette distribution des pics positifs se simplifie dans le cas des signaux pour lesquels le facteur d’irrégularité vaut \(I=0\text{ou}I=1\) .
:math:`I=0`Signal à large bande : loi de Gauss ou loi normale#
Dans le cas d’un signal large bande, les pics positifs sont distribués suivant une loi de GAUSS:
\({p}_{\text{pic}}^{+}(X)=\frac{2}{\sqrt{2\pi {\sigma}_{{X}^{2}}}}{e}^{-\frac{{X}^{2}}{2{\sigma}_{{X}^{2}}}}\)
:math:`I=1`Signal à bande étroite : loi de Rayleigh#
Dans le cas d’un signal à bande étroite, les pics positifs sont distribués suivant une loi de RAYLEIGH:
\({p}_{\text{pic}}^{+}(X)=\frac{X}{{\sigma}_{{X}^{2}}}{e}^{-\frac{{X}^{2}}{2{\sigma}_{{X}^{2}}}}\)
Calcul des valeurs dans Code_Aster#
Les valeurs de ces deux lois sont calculées dans Code_Aster sous les mots-clé facteur RAYLEIGH ou GAUSS.
A partir de l’écart type \({\sigma}_{X}=\sqrt{{\lambda}_{0}}\) calculé précédemment on calcule les valeurs de probabilité des pics \({p}_{\text{pic}}^{+}(X)\text{pour}X\in \left[0,6{\sigma}_{X}\right]\) avec un pas par défaut de \(\frac{6{\sigma}_{X}}{200}\) .
Si l’utilisateur désire affiner son analyse, il peut fournir les valeurs VALMIN et VALMAX du domaine de variation de \(X\) . Il peut aussi fournir la valeur du pas de calcul, sinon celle-ci sera prise au 200ème de la bande retenue.
La figure [Figure 4.2-a] montre que le domaine choisi par défaut, jusqu’à \(6{\sigma}_{X}\) , couvre bien la totalité des valeurs de \(X\) à probabilités non nulles.
Réponse sismique : loi de Vanmarcke#
Dans le cas de la réponse à un séisme d’une structure primaire (c’est-à-dire excitée à sa base par le sol) ayant un mode prépondérant , ie qui répond (compte-tenu des fréquences excitatrices) sur un seul mode, on utilise la loi de fiabilité de VANMARCKE [bib10] qui permet d’estimer, sur une durée de fonctionnement \(T\) la probabilité que le processus dépassele seuil de ruine .
La notion de mode prépondérant est ici très importante, si la structure répond sur plusieurs modes la formule dans son expression actuelle ne convient plus.
Soit \(X(t)\) la réponse à un bruit blanc gaussien, d’un oscillateur linéaire faiblement amorti. On définit la probabilité \(W(T)\) que le processus reste dans le domaine de sécurité. \(W(T)\) représente la fraction d’échantillon qui n’ont pas franchi le seuil de ruine après une durée \(T\) ; c’est une mesure de fiabilité.
Elle peut s’écrire sous la forme \(W(T)=\text{Prob}\left\lbrace \mid X(t)<{X}_{0};0\le t<T\mid \right\rbrace :{p}_{1}(T)\text{=-}\frac{\text{dW}(T)}{\mathrm{dT}}\) est la densité de probabilité de franchissement du seuil.
Pour les valeurs élevées de \(T\) on prendra : \({p}_{1}(T)=A\alpha {e}^{-\alpha T}\) où \(A\) dépend des conditions initiales et \(\alpha\) est le taux de décroissance limite.
Hypothèse des franchissements indépendants#
Avec l’hypothèse que les dépassements de seuil avec une pente positive soient des événements indépendants , le nombre de franchissements sur \([0,T[\) constitue un processus de Poisson de taux d’arrivage \({N}_{{X}_{0}}=2{N}_{{X}_{0}}^{+}\) (nombre de dépassement de \({X}_{0}\) défini en [§4.1.1]). La probabilité que \(n\) passages se produisent sur la durée \(T\) s’écrit par application de la loi de Poisson (voir [§4] de [bib8]):
\(P\left\lbrace n\text{passages sur}[0,T[\right\rbrace ={e}^{-{N}_{{X}_{0}}T\frac{{({N}_{{X}_{0}}T)}^{n}}{n!}}\)
La structure est “fiable” si le seuil n’est pas dépassé durant la durée \(T\) . La fiabilité \(W(T)\) correspond donc à \(n=0\) passage d’où \(W(T)={e}^{-{N}_{{X}_{0}}T}\) .
Le taux de décroissance limite vaut donc ici \(\alpha ={N}_{{X}_{0}}=2{N}_{{X}_{0}}^{+}\) .
Loi de Vanmarcke#
Pour un processus stationnaire gaussien, la probabilité de dépasser la valeur \(X\) vaut [§4.1.1]: \({N}_{X}={N}_{0}{e}^{-\frac{{X}^{2}}{2{\sigma}_{{X}^{2}}}}\) ; on en déduit que la probabilité que la valeur initiale de l’enveloppe soit inférieure au seuil \(X\) est : \(1-\frac{{N}_{X}}{{N}_{0}}=1-{e}^{-\frac{{X}^{2}}{2{\sigma}^{2}}}\) .
On combine alors cette expression avec la loi de décroissance limite obtenue avec l’hypothèse de franchissements indépendants, ce qui conduit à l’expression de la fiabilité :
\(W(T)={\mathrm{Ae}}^{-\alpha T}=(1-{e}^{-{s}^{2}/2}){e}^{-{N}_{0}T\frac{(1-{e}^{-\text{hs}})}{{e}^{\frac{{s}^{2}}{2}}-1}}\)
avec \({N}_{0}=\frac{1}{\pi}\sqrt{\frac{{\lambda}_{2}}{{\lambda}_{0}}}\) taux de passage par 0 et \(T\) durée d’observation
\(\text{où}s=\frac{X}{\sqrt{{\lambda}_{0}}}\text{}h={d}^{1.2}\sqrt{\frac{\pi}{2}}\text{}\delta =\sqrt{1-\frac{{\lambda}_{1}^{2}}{{\lambda}_{0}{\lambda}_{2}}}\)
\(\delta\) est un estimateur de largeur de bande de la DSP de \(X\) .
Cette relation a l’immense avantage de fournir un estimateur explicite de la fiabilité en fonction de la valeur réduite du seuil s , du nombre de demi-cycles équivalents \({N}_{0}\) , et du paramètre de largeur de bande \(\delta\) .
NB:
“L’accord entre l’estimateur et les simulations peut être amélioré si on remplace \(\delta\) par \({\delta}^{1.2}\) ” [bib6] “correction” introduite dans la formule écrite ci-dessus par rapport à l’expression du taux de décroissance limite donnée dans le paragraphe précédent.
La représentation graphique suivante est effectuée dans le cas d’un processus de fréquence apparente \(15\mathrm{Hz}\) , soit \({N}_{0}=30\mathrm{Hz}\) , pour une durée d’observation de \(T=\mathrm{1s}\) . L’estimateur de largeur de bande \(\delta\) est pris égal à 0.30. Comme dans les illustrations précédentes, l’amplitude est normalisée par rapport à l’écart-type.
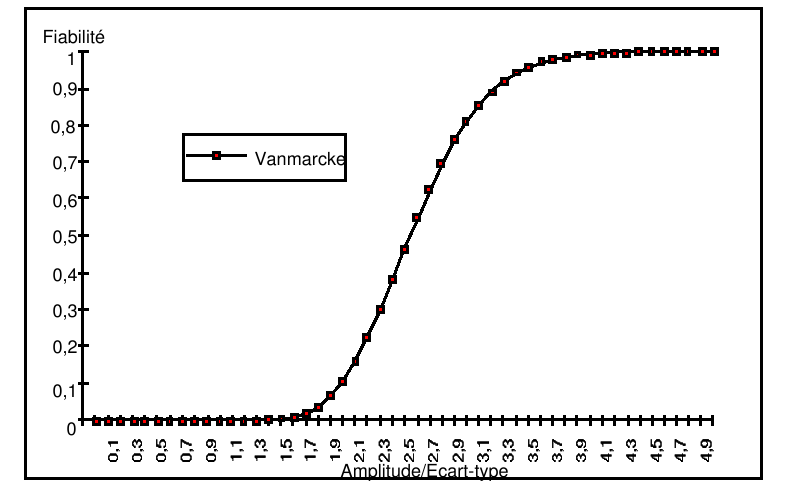
Figure 4.3.2-a : Évolution de la fiabilité suivant la loi de Vanmarcke en fonction de l’amplitude du processus normalisé par rapport à l’écart-type du signal
Rappel:
Cette analyse statistique est effectuée à partir d’hypothèses relativement restrictives, à savoir que le processus doit être à “bande étroite”; il faudra donc vérifier que le facteur d’irrégularité \(I\) n’est pas trop différent de 1 et que le signal ne comporte qu’un pic principal.
Facteur de pic implanté dans Code_Aster#
L’opérateur POST_DYNA_ALEA permet de calculer le facteur de pic de Vanmarcke (FACT_PIC) et le maximum moyen d (MAX_MOY). Ce dernier s’obtient comme le produit du facteur de pic avec l’écart-type: \(d=\sigma {\eta}_{{T}_{\mathit{SM}},p}\)
Plus généralement, le facteur de pic permet d’estimer les \(p\) -fractiles de la distribution des maxima d’un processus gaussien à partir de l’écart-type. Le facteur de pic, dû à Vanmarcke [bib10], s’écrit:
\({\eta}_{{T}_{\mathit{SM}},p}^{2}=2\ln({\mathrm{2N}}_{\eta}[1-\exp(-{\delta}^{1.2}\sqrt{\pi \ln({\mathrm{2N}}_{\eta})})])\) .
Dans cette expression, \(\delta\) est la largeur de bande du processus (cf§4.3.2) et \({N}_{\eta}\) se détermine à partir de la fréquence centrale \({\nu}_{0}^{+}={\mathrm{0.5N}}_{0}\) comme \({N}_{\eta}={\mathrm{0.5N}}_{0}T{(-\lnp)}^{-1}\) .
Il s’agit donc, pour MAX_MOY,strictement dit du maximum médian, ceci étant, les deux statistiques (moyenne et médiane) sont confondues pour le cas d’une distribution Gaussienne.
Remarques#
Ce post-traitement s’effectue sur des interspectres stockés dans des interspectre. Il fournit des éléments statistiques de la réponse de la structure qui peuvent donc être convertis en une information statistique de la fiabilité, ou servir ensuite pour des calculs de dommage par fatigue (POST_FATI_ALEA).
Bibliographie#
DUVAL: Cahier des charges d’un module de calcul de réponse dynamique sous excitations aléatoires pour le Code_Aster - Rapport EDF HP61/91.177, 1991.
DUVAL: Réponse dynamique sous excitations aléatoires dans le Code_Aster: Principes théoriques et exemples d’utilisation - Rapport EDF HP61/92.148, 1992.
MAX et coll.: Méthodes et techniques de traitement du signal et applications aux mesures physiques.
LABBE et H. NOE: « Stochastic approach for the seismic design of nuclear power plant equipements ». Nuclear Engineering and Design 129 (1991) 367‑379.
D.E. CARTWRIGHT & M.S. LONGUET-HIGGINS : The statistical distribution of the maxima of a random function - Proceedings of the Royal Society of London - Series A Vol 237 (1956).
PREUMONT: « Vibrations aléatoires et analyse spectrale »- Presses polytechniques et universitaires romandes. Édition 1990 - En particulier: Chapitre 10.
R.J. GIBERT: « Vibrations des structures. Interactions avec les fluides. Sources d’excitation aléatoires » - Ch 17: notions générales sur les processus aléatoires et la réponse des systèmes linéaires - Ch 20: Excitations sismiques des structures. Collection des Études et Recherches d’EdF ESE n°69 - Eyrolles 1988.
R.W. CLOUGH et J. PENZIEN dans « Dynamics of structures » 4ème partie: Vibrations aléatoires, 5ème partie: Analyse de la réponse de structures aux séismes - Mc Graw Hill 1975.
Y.K. LIN & G.Q CAI: Probabilistic structural dynamics (advanced theory and applications) McGraw Hill.
Vanmarcke, E.H., Gasparini, D.A. (1976) Simulated earthquake motions compatible with prescribed response spectra. SIMQKE User’s manual and documentation. MIT Report R76-4.
[R4.05.04] Génération de signaux sismiques.
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
4 |
A.DUMOND-EDF/R&D-AMV |
Texte initial |
11.2 |
F.VOLDOIRE EDF/R&D/AMA |
Quelques corrections cosmétiques de formules. |
12.1 |
I.Zentner |
Correction de la formule de Vanmarcke |
Conventions pour les Densités Spectrales de Puissance
A1.1 Introduction
Afin de conserver la cohérence nécessaire pour l’ensemble des calculs et les comparaisons avec l’expérience (cf [§2.3] et [§3.3]), nous développons ci-après les deux ensembles de définitions cohérents avec les calculs de réponse aléatoire et de post-traitement tels qu’ils ont été retenus pour Aster :
le premier à partir de données spectrales exprimées en fonction de la fréquence. C’est cet ensemble qui est cohérent avec le calcul réalisé dans l’opérateur CALC_INTE_SPEC [U4.56.03].
le second à partir de données spectrales exprimées en fonction de la pulsation.
Ces deux ensembles rendent valide le post-traitement tel qu’il est exprimé dans POST_DYNA_ALEA.
Nous préciserons à chaque fois l’unité dans laquelle sont exprimées les différentes quantités manipulées en fonction de l’unité u du signal de référence. Les explications données sont succinctes. On pourra pour plus de détails se référer à la référence [bib10].
A1.2 Types de signaux et définition de la puissance
Nous considérons quatre types de signaux:
signaux d’énergie finie,
signaux périodiques,
signaux de puissance finie et signaux déterministes,
signaux aléatoires satisfaisant à l’hypothèse d’ergodicité et stationnaires.
En calcul dynamique aléatoire les signaux sont aléatoires. Pour l’interprétation de résultats expérimentaux, les signaux sont soit périodiques, soit de puissance finie (déterministes).
Nous définissons pour chaque type de signal une quantité énergétique qui est soit une énergie, soit une puissance et que nous désignerons dans les paragraphes suivants sous le terme unique de puissance:
Les signaux d’énergie finie sont définis par leur énergie \(E\) exprimée en \({u}^{2}s\) :
\(E=\underset{-\infty }{\overset{+\infty }{\int}}x{(t)}^{2}\text{dt}\text{<+}\infty\) éq An1.2-1
Les signaux périodiques sont définis par la puissance \(P\) du signal exprimée en u2:
\(P=\frac{1}{T}\underset{\left[T\right]}{\int}{\mid x(t)\mid }^{2}\text{dt}\) éq An1.2-2
\(T\) désigne la période du signal. \(\left[T\right]\) est un intervalle de longueur \(T\) .
Les signaux de puissance finie sont définis par la puissance moyenne \(P\) du signal exprimée en \({u}^{2}\) :
\(P=\underset{T\to +\infty }{\lim}(\frac{1}{T}\underset{-T/2}{\overset{+T/2}{\int}}{\mid x(t)\mid }^{2}\text{dt})\text{<+}\infty\) éq An1.2-3
Les signaux aléatoires sont définis par la puissance moyenne \(P\) du signal exprimée en \({u}^{2}\) :
\(P=E\left[{\mid X(t)\mid }^{2}\right]=\underset{T\to +\infty }{\lim}(\frac{1}{T}\underset{-T/2}{\overset{+T/2}{\int}}{\mid x(t)\mid }^{2}\text{dt})\text{<+}\infty\) éq An1.2-4
On se sert ici de l’hypothèse d’ergodicité qui sous-tend que les moyennes statistiques et temporelles effectuées sur une réalisation d’un processus sont identiques.
A1.3 Autocorrélations
Compte tenu des rappels statistiques effectués dans le corps du texte on a pour chaque type de signaux précédemment définis:
Autocorrélation des signaux d’énergie finie , exprimée en \({u}^{2}/\mathrm{Hz}\) :
\({R}_{\text{XX}}(\tau )=\int\overline{x(t)}x(t+\tau )\text{dt}\) éq An1.3-1
Autocorrélation des signaux périodiques , exprimée en \({u}^{2}\) :
\({R}_{\text{XX}}(\tau )=\frac{1}{T}\underset{\left[T\right]}{\int}\overline{x(t)}x(t+\tau )\text{dt}\) éq An1.3-2
Autocorrélation des signaux de puissance finie , exprimée en \({u}^{\mathrm{2 }}\) :
\({R}_{\text{XX}}(\tau )=\underset{T\to +\infty }{\lim}\frac{1}{T}\underset{-T/2}{\overset{+T/2}{\int}}\overline{x(t)}x(t+\tau )\text{dt}\) éq An1.3-3
Autocorrélation des signaux aléatoires , exprimée en \({u}^{2}\) :
\({R}_{\text{XX}}(\tau )=E\left[\overline{X(t)}X(t+\tau )\right]=\underset{T\to +\infty }{\lim}\frac{1}{T}\underset{-T/2}{\overset{+T/2}{\int}}\overline{x(t)}x(t+\tau )\text{dt}\) éq An1.3-4
A1.4 Définition de la densité spectrale de puissance
A1.4.1 Expression en fréquence
On définit la densité spectrale de puissance par:
\({S}_{\text{XX}}(f)=\underset{-\infty }{\overset{+\infty }{\int}}{R}_{\text{XX}}(\tau ){e}^{-2i\pi f\tau }d\tau \text{ou}{G}_{\text{XX}}(f)=\underset{0}{\overset{+\infty }{\int}}{R}_{\text{XX}}(\tau ){e}^{-2i\pi f\tau }d\tau\) éq An1.4.1-1
Le mécanicien ne s’intéressant qu’aux valeurs positives de la fréquence et du temps, la fonction \({G}_{\text{XX}}\) est plus souvent usitée.
On peut démontrer, dans le cas où les Transformations de Fourier des signaux existent, que cette définition est équivalente (théorème de Wiener-Kinchine) aux définitions de la densité spectrale de puissance suivantes.
Pour les signaux d’énergie finie:
\({G}_{\text{XX}}(f)={\mid X(f)\mid }^{2}\) exprimée en \({u}^{2}/{\mathrm{Hz}}^{2}\) éq An1.4.1-2
Pour les signaux périodiques:
Si \(X(f)=\sum_{n\text{=-}\infty }^{n\text{=+}\infty }{C}_{n}\delta (f-{\mathrm{nf}}_{0})\) alors \({G}_{\text{XX}}(f)=\sum_{n\text{=-}\infty }^{n\text{=+}\infty }{C}_{n}^{2}\delta (f-{\mathrm{nf}}_{0})\) éq An1.4.1-3
\({G}_{\text{XX}}(f)\) s’exprime en \({u}^{2}/\mathrm{Hz}\) .
\({f}_{0}\) est l’inverse de la période du signal.
\({C}_{n}\) coefficient des fonctions Dirac.
Pour les signaux de puissance finie:
\({G}_{\text{XX}}(f)=\underset{T\to +\infty }{\lim}(\frac{1}{T}{\mid {X}_{\left[T\right]}(f)\mid }^{2})\text{en}{u}^{2}/\mathrm{Hz}\) éq An1.4.1-4
où \({X}_{\left[T\right]}\) désigne la restriction de \(x(t)\text{à}\left[-\text{T/}2;\text{T/}2\right]\) .
Pour les signaux aléatoires:
\({G}_{\text{XX}}(f)=\underset{T\to +\infty }{\lim}E\left[\frac{1}{T}{\mid {X}_{\left[T\right]}(f)\mid }^{2}\right]\text{en}{u}^{2}/\mathrm{Hz}\) éq An1.4.1-5
où \({X}_{\left[T\right]}\) désigne la restriction de \(x(t)\) à \(\left[-T/2;T/2\right]\) .
Lien entre la DSP et la puissance.
Avec les définitions données ci-dessus pour les densités spectrales de puissance, on a pour tous les signaux, la relation:
\(P=\underset{-\infty }{\overset{+\infty }{\int}}{G}_{\text{XX}}(f)\text{df}\) éq An1.4.1-6
Cette relation est établie en utilisant le théorème de PARSEVAL.
A1.4.2 Expression en pulsation
En pulsation, on définit la densité spectrale de puissance par:
\({G}^{{'}_{\text{XX}}}(\omega )=\frac{1}{2\pi }\underset{-\infty }{\overset{+\infty }{\int}}{R}_{\text{XX}}(\tau ){e}^{-i\omega \tau }d\tau\) éq An1.4.2-1
De même que pour l’expression en fréquence, on peut démontrer, dans le cas où les Transformations de Fourier des signaux existent, que cette définition est équivalente (théorème de Wiener-Kinchine) aux définitions de la densité spectrale de puissance suivantes
Pour les signaux d’énergie finie:
\({G}_{\text{XX}}^{'}(\omega )=2\pi {\mid {X}^{'}(\omega )\mid }^{2}\) exprimée en \({u}^{2}/{\mathrm{Hz}}^{2}\) éq An1.4.2-2
Pour les signaux périodiques:
\(\text{Si}{X}^{'}(\omega )=\sum_{n\text{=-}\infty }^{n\text{=+}\infty }{C}_{n}\delta (\omega -n{\omega}_{0})\text{}\text{alors}{G}_{\text{XX}}^{'}(\omega )=\sum_{n\text{=-}\infty }^{n\text{=+}\infty }{C}_{n}^{2}\delta (\omega -n{\omega}_{0})\) éq An1.4.2-3
\({G}_{\text{XX}}^{'}(\omega )\) s’exprime en \({u}^{2}/\mathrm{Hz}\) , et \({\omega}_{0}=\frac{2\pi }{T}\) où \(T\) est la période du signal.
\({C}_{n}\) coefficient des fonctions Dirac.
Pour les signaux de puissance finie:
\({G}_{\text{XX}}^{'}(\omega )=\underset{T\to +\infty }{\lim}(\frac{2\pi }{T}{\mid {X}_{\left[T\right]}^{'}(\omega )\mid }^{2})\text{en}{u}^{2}/\mathrm{Hz}\) éq An1.4.2-4
\({X}_{\left[T\right]}^{'}\) désigne la restriction de \(x(t)\) à \(\left[-\text{T/}2;\text{T/}2\right]\) .
Pour les signaux aléatoires:
\({G}_{\text{XX}}^{'}(\omega )=\underset{T\to +\infty }{\lim}E\left[\frac{2\pi }{T}{\mid {X}_{\left[T\right]}^{'}(\omega )\mid }^{2}\right]\) en \({u}^{2}/\mathrm{Hz}\) éq An1.4.2-5
\({X}_{\left[T\right]}^{'}\) désigne la restriction de \(x(t)\) à \(\left[-T/2;T/2\right]\) .
Lien entre la DSP et la puissance.
De même, on a pour tous les signaux la relation - qui découle du théorème de PARSEVAL -:
\(P=\underset{-\infty }{\overset{+\infty }{\int}}{G}_{\text{XX}}^{'}(\omega )d\omega\) éq An1.4.2-6
A1.4.1 Relation entre DSP en fréquence et DSP en pulsation
Pour les quatre types de signaux:
\({G}_{\text{XX}}^{'}(\omega )=\frac{1}{2\pi }{G}_{\text{XX}}(f)\) éq An1.4.3-1
Transformation de Hilbert
Soit \(X(t)\) |
un signal réel de transformée de Fourier \(X(\omega )\) . |
Soit \(H(\omega )\) |
la fonction de Transfert : \(H(\omega )=j\text{sign}(\omega )=\lbrace \begin{array}{cc}j& \omega >0\\ -j& \omega <0\\ 0& \omega =0\end{array}\) |
\(H(\omega )\) transforme \(X(t)\) en sa transformée de Hilbert notée \(\stackrel{ˆ}{X}(t)\) . Le système de fonction de transfert \(H(\omega )\) produit un déphasage de \(+90°\) pour les fréquences positives et de \(–90°\) pour les fréquences négatives. Il suit du théorème de convolution que \(\stackrel{ˆ}{X}(t)\) peut aussi être définie comme la convolution de \(X(t)\) par la réponse impulsionnelle correspondante, soit \(h(t)=1/\pi t\) .
\(\stackrel{ˆ}{X}(t)\) est également réelle, une seconde application de la transformée de Hilbert restitue le signal initial, changé de signe et amputé de son éventuelle composante continue.
Exemple : \(x(t)=A\cos\omega t\to \stackrel{ˆ}{x}(t)\text{=-}A\sin\omega t\)
Cette propriété est à la base de l’utilisation de la transformée de Hilbert pour définir l’enveloppe d’un processus en bande étroite.