v7.31.112 WTNV112 – Ecoulement gravitaire dans un milieu poreux non saturé#
Résumé :
On étudie le comportement hydraulique d’un milieu poreux non saturé. Cinq modélisations sont effectuées : l’une est tridimensionnelle (modélisation B) et les quatre autres sont bidimensionnelles (modélisations A,C,D,E)
Ce test consiste à étudier l’influence d’un écoulement gravitaire sur la distribution de la pression des fluides (liquide et gaz) du milieu non saturé.
Les modèles étudiés sont \(\mathrm{2D}\) plans (DPQ8 et DPTR6) et \(\mathrm{3D}\) volumique HEXA20 avec un comportement linéaire, il s’agit d’un problème évolutif.
La solution de référence est unidimensionnelle car elle ne dépend que de la coordonnée verticale.
Solution de référence#
Méthode de calcul utilisée pour la solution de référence#
L’équation de conservation de la masse fluide est donnée par l’expression suivante :
\(\frac{{\mathrm{dm}}_{i}}{\mathrm{dt}}+{\mathrm{DivM}}_{i}=0\) \(i\) variant de \(1\) au nombre de constituants (1)
Dans notre exemple, le modèle est constitué de deux fluides : l’eau liquide \((e)\) et l’air sec \((a)\) . L’équation (1) se divise donc en deux :
\(\lbrace \begin{array}{c}\frac{{\mathit{dm}}_{e}}{\mathit{dt}}+{\mathit{DivM}}_{e}=0\\ \frac{{\mathit{dm}}_{a}}{\mathit{dt}}+{\mathit{DivM}}_{a}=0\end{array}\) (2)
Les flux de fluide ont pour expression :
\(\lbrace \begin{array}{c}{M}_{e}={\rho}_{e}{\lambda}_{e}(-\nabla {p}_{e}+{\rho}_{e}g)\\ {M}_{a}={\rho}_{a}{\lambda}_{a}(-\nabla {p}_{a}+{\rho}_{a}g)\end{array}\) (3)
Or l’apport massique de fluide est défini par les équations (4) où \(N=\left[\begin{array}{cc}{N}_{\mathit{ee}}& {N}_{\mathit{ea}}\\ {N}_{\mathit{ae}}& {N}_{\mathit{aa}}\end{array}\right]\) est une matrice symétrique dont les termes (équations (5)) dépendent du degré de saturation \(S\) , de la porosité \(\phi\) , du coefficient de \(\mathrm{Biot}b\) , de la perméabilité du liquide et \({K}_{e}\) de l’élasticité de la matrice solide \({K}_{s}\) .
\(\lbrace \begin{array}{c}\frac{{\mathit{dm}}_{e}}{\mathit{dt}}={\rho}_{e}{N}_{\mathit{ee}}\frac{{\mathit{dp}}_{e}}{\mathit{dt}}+{\rho}_{e}{N}_{\mathit{ea}}\frac{{\mathit{dp}}_{a}}{\mathit{dt}}\\ \frac{{\mathit{dm}}_{a}}{\mathit{dt}}={\rho}_{a}{N}_{\mathit{ae}}\frac{{\mathit{dp}}_{e}}{\mathit{dt}}+{\rho}_{a}{N}_{\mathit{aa}}\frac{{\mathit{dp}}_{a}}{\mathit{dt}}\end{array}\) (4)
\(\lbrace \begin{array}{c}{N}_{\mathit{ee}}=-\varphi \frac{\partial S}{\partial {p}_{c}}+S(\frac{\varphi}{{K}_{e}}+\frac{b-\varphi }{{K}_{s}}S)\\ {N}_{\mathit{aa}}=-\varphi \frac{\partial S}{\partial {p}_{c}}+(1-S)(\frac{\varphi}{{p}_{a}}+\frac{b-\varphi }{{K}_{s}}(1-S))\\ {N}_{\mathit{ea}}={N}_{\mathit{ae}}=\varphi \frac{\partial S}{\partial {p}_{c}}+(1-S)(\frac{b-\varphi }{{K}_{s}}S)\end{array}\) (5)
La formulation variationnelle des équations (2), en tenant compte de (3) et (4) est :
\(\lbrace \begin{array}{c}{\int}_{\Omega}{N}_{\mathrm{ee}}\frac{{\mathrm{dp}}_{e}}{\mathrm{dt}}{p}_{e}^{\text{*}}+{\int}_{\Omega}{N}_{\mathrm{ea}}\frac{{\mathrm{dp}}_{a}}{\mathrm{dt}}{p}_{e}^{\text{*}}+{\int}_{\Omega}{\lambda}_{e}\nabla {p}_{e}.\nabla {p}_{e}^{\text{*}}={\int}_{\Omega}{\lambda}_{e}{\rho}_{e}g.\nabla {p}_{e}^{\text{*}}-{\int}_{\partial \Omega }\frac{{M}_{e}^{\mathrm{ext}}}{{\rho}_{e}}{p}_{e}^{\text{*}}\\ {\int}_{\Omega}{N}_{\mathrm{ea}}\frac{{\mathrm{dp}}_{e}}{\mathrm{dt}}{p}_{a}^{\text{*}}+{\int}_{\Omega}{N}_{\mathrm{aa}}\frac{{\mathrm{dp}}_{a}}{\mathrm{dt}}{p}_{a}^{\text{*}}+{\int}_{\Omega}{\lambda}_{a}\nabla {p}_{a}.\nabla {p}_{a}^{\text{*}}={\int}_{\Omega}{\lambda}_{a}{\rho}_{a}g.\nabla {p}_{a}^{\text{*}}-{\int}_{\partial \Omega }\frac{{M}_{a}^{\mathrm{ext}}}{{\rho}_{a}}{p}_{a}^{\text{*}}\end{array}\) (6)
Discrétisation
Pour le calcul de la solution analytique, on se place dans un cas unidimensionnel avec un seul élément de degré \(1\) .
Remarque :
En \(\mathrm{THM}\) , tous les maillages doivent être quadratiques, mais dans le cas hydraulique l’intégration est toujours linéaire (les nœuds milieux sont ignorés).
On suppose dans les deux cas que la pesanteur est orientée selon les \(z\) négatifs.
On suppose d’autre part que les non-linéarités sont faibles et que les coefficients \(N,\lambda ,\rho\) sont constants. Il faut donc que les variations de pression soient suffisamment faibles pour que \(N\) et \(\rho\) puissent être supposés constants.
En hydraulique, la discrétisation sera toujours linéaire.
Discrétisation linéaire :

On écrira :
\(p(z,t)=\sum_{i=1}^{2}{p}^{i}(t){\lambda}_{i}(z)\) (7)
Avec :
\(\lbrace \begin{array}{c}{\lambda}_{1}=\frac{1}{2}-z\\ {\lambda}_{2}=\frac{1}{2}+z\end{array}\) (8)
En introduisant alors les matrices et vecteurs :
\(\lbrace \begin{array}{c}[A]=[{A}_{ij}];{A}_{ij}=\underset{-1/2}{\overset{1/2}{\int}}{\lambda}_{i}{\lambda}_{j}\mathrm{dz}\\ [B]=[{B}_{ij}];{B}_{ij}=\underset{-1/2}{\overset{1/2}{\int}}\frac{d{\lambda}_{i}}{\mathrm{dz}}\frac{d{\lambda}_{j}}{\mathrm{dz}}\mathrm{dz}\\ \lbrace {F}_{g}\rbrace =\lbrace {F}_{\mathrm{gi}}\rbrace ;{F}_{\mathrm{gj}}=\underset{-1/2}{\overset{1/2}{\int}}\frac{d{\lambda}_{i}}{\mathrm{dz}}\mathrm{dz}\end{array}\) (9)
Et en notant :
\(\lbrace {p}_{e}\rbrace =\left\lbrace \begin{array}{c}{P}_{e}^{1}\\ {p}_{e}^{2}\end{array}\right\rbrace ;\lbrace {p}_{a}\rbrace =\left\lbrace \begin{array}{c}{P}_{a}^{1}\\ {p}_{a}^{2}\end{array}\right\rbrace\) (10)
\(\lbrace {M}_{e}^{\mathrm{ext}}\rbrace =\left\lbrace \begin{array}{c}{{M}_{e}^{\mathrm{ext}}}_{1}\\ {{M}_{e}^{\mathrm{ext}}}_{2}\end{array}\right\rbrace ;\lbrace {M}_{a}^{\mathrm{ext}}\rbrace =\left\lbrace \begin{array}{c}{{M}_{a}^{\mathrm{ext}}}_{1}\\ {{M}_{a}^{\mathrm{ext}}}_{2}\end{array}\right\rbrace\) (11)
Les équations (6) deviennent :
\(\lbrace \begin{array}{c}\frac{{N}_{\mathrm{ee}}}{{\lambda}_{e}}[A]\left\lbrace \frac{{\mathrm{dp}}_{e}}{\mathrm{dt}}\right\rbrace +\frac{{N}_{\mathrm{ea}}}{{\lambda}_{e}}[A]\left\lbrace \frac{{\mathrm{dp}}_{a}}{\mathrm{dt}}\right\rbrace +[B]\lbrace {p}_{e}\rbrace ={\rho}_{e}\lbrace {F}_{g}\rbrace -\frac{1}{{\lambda}_{e}{\rho}_{e}}\lbrace {M}_{e}^{\mathrm{ext}}\rbrace \\ \frac{{N}_{\mathrm{ae}}}{{\lambda}_{a}}[A]\left\lbrace \frac{{\mathrm{dp}}_{e}}{\mathrm{dt}}\right\rbrace +\frac{{N}_{\mathrm{aa}}}{{\lambda}_{a}}[A]\left\lbrace \frac{{\mathrm{dp}}_{a}}{\mathrm{dt}}\right\rbrace +[B]\lbrace {p}_{a}\rbrace ={\rho}_{a}\lbrace {F}_{g}\rbrace -\frac{1}{{\lambda}_{a}{\rho}_{a}}\lbrace {M}_{a}^{\mathrm{ext}}\rbrace \end{array}\) (12)
Le calcul des matrices \([A]\) et \([B]\) et du vecteur \(\lbrace F\rbrace\) donne :
\([A]=\frac{1}{3}\left[\begin{array}{cc}1& 1/2\\ 1/2& 1\end{array}\right];[B]=\left[\begin{array}{cc}1& -1\\ -1& 1\end{array}\right];\lbrace {F}_{g}\rbrace =\left\lbrace \begin{array}{c}-1\\ 1\end{array}\right\rbrace\) (13)
On définit alors \(\lbrace {v}_{1}\rbrace ,\lbrace {v}_{2}\rbrace\) les vecteurs propres de \({[A]}^{-1}[B]\) .
On a les propriétés :
\({\lbrace {v}_{i}\rbrace }^{T}[A]\lbrace {v}_{j}\rbrace ={\lbrace {v}_{i}\rbrace }^{T}[B]\lbrace {v}_{j}\rbrace =0\text{}\mathrm{si}\text{}i\ne j\) (14)
Et on pose :
\({a}_{i}={\lbrace {v}_{i}\rbrace }^{T}[A]\lbrace {v}_{i}\rbrace ,{b}_{i}={\lbrace {v}_{i}\rbrace }^{T}[B]\lbrace {v}_{i}\rbrace ,{f}_{i}={\lbrace {v}_{i}\rbrace }^{T}\lbrace {F}_{g}\rbrace \mathrm{et}{M}^{i}={\lbrace {v}_{i}\rbrace }^{T}\lbrace {M}^{\mathrm{ext}}\rbrace\) (15)
On trouve :
\(\lbrace {v}_{1}\rbrace =\lbrace \begin{array}{c}1\\ 1\end{array}\rbrace ;\lbrace {v}_{2}\rbrace =\lbrace \begin{array}{c}-1\\ 1\end{array}\rbrace\) (16)
\(\lbrace \begin{array}{c}{a}_{1}=1;{b}_{1}=0;{f}_{1}=0\\ {a}_{2}=\frac{1}{3};{b}_{2}=4;{f}_{2}=-\mathrm{2g}\end{array}\) (17)
On décompose alors \(\lbrace {p}_{e}\rbrace\) et \(\lbrace {p}_{a}\rbrace\) sur la base des \(\lbrace {v}_{i}\rbrace\)
\(\lbrace {p}_{e}\rbrace =\sum_{i=1}^{2}{\alpha}_{e}^{i}\lbrace {v}_{i}\rbrace ;\lbrace {p}_{a}\rbrace =\sum_{i=1}^{2}{\alpha}_{a}^{i}\lbrace {v}_{i}\rbrace\) (18)
Compte tenu des propriétés d’orthogonalité (14), le système d’équations (12) s’écrit :
\(\lbrace \begin{array}{c}\frac{{N}_{\mathrm{ee}}}{{\lambda}_{e}}{a}_{i}\frac{d{\alpha}_{e}^{i}}{\mathrm{dt}}+\frac{{N}_{\mathrm{ea}}}{{\lambda}_{e}}{a}_{i}\frac{d{\alpha}_{a}^{i}}{\mathrm{dt}}+{b}_{i}{\alpha}_{e}^{i}={\rho}_{e}{f}_{i}-\frac{1}{{\lambda}_{e}{\rho}_{e}}{M}_{e}^{i}\\ \frac{{N}_{\mathrm{ae}}}{{\lambda}_{a}}{a}_{i}\frac{d{\alpha}_{e}^{i}}{\mathrm{dt}}+\frac{{N}_{\mathrm{aa}}}{{\lambda}_{a}}{a}_{i}\frac{d{\alpha}_{a}^{i}}{\mathrm{dt}}+{b}_{i}{\alpha}_{a}^{i}={\rho}_{a}{f}_{i}-\frac{1}{{\lambda}_{a}{\rho}_{a}}{M}_{a}^{i}\end{array}\) (19)
Posant :
\(\lbrace {\alpha}^{i}\rbrace =\lbrace \begin{array}{c}{\alpha}_{e}^{i}\\ {\alpha}_{a}^{i}\end{array}\rbrace ;[N]=\left[\begin{array}{cc}{N}_{\mathrm{ee}}& {N}_{\mathrm{ea}}\\ {N}_{\mathrm{ae}}& {N}_{\mathrm{aa}}\end{array}\right];[L]=\left[\begin{array}{cc}{\lambda}_{e}& 0\\ 0& {\lambda}_{a}\end{array}\right]\) (20)
L’équation (19) s’écrit :
\([N]=\left[\frac{d{\alpha}^{i}}{\mathrm{dt}}\right]+\frac{{b}_{i}}{{a}_{i}}[L]\lbrace {\alpha}^{i}\rbrace =\frac{{f}_{i}}{{a}_{i}}\left\lbrace \begin{array}{c}{\rho}_{e}{\lambda}_{e}\\ {\rho}_{a}{\lambda}_{a}\end{array}\right\rbrace -\left\lbrace \begin{array}{c}{M}_{e}^{i}/{\rho}_{e}{a}_{i}\\ {M}_{a}^{i}/{\rho}_{a}{a}_{i}\end{array}\right\rbrace\) (21)
Conditions initiales
On suppose que :
\(\begin{array}{c}{p}_{a}(x,t=0)={p}_{a}^{0}\\ {p}_{e}(x,t=0)={p}_{a}^{0}-{p}_{c}^{0}\end{array}\) uniformes en espace ;
Compte tenu des valeurs des vecteurs \(\lbrace {v}_{1}\rbrace ,\lbrace {v}_{2}\rbrace\) (équations (16)), on voit facilement que :
\(\begin{array}{c}{\alpha}_{a}^{1}(t=0)={p}_{a}^{0};{\alpha}_{e}^{1}(t=0)={p}_{a}^{0}-{p}_{c}^{0}\\ {\alpha}_{a}^{2}(t=0)={\alpha}_{e}^{2}(t=0)=0\end{array}\) (22)
On se place dans un cas où les équations de l’hydraulique sont découplées \(({N}_{\mathrm{ea}}={N}_{\mathrm{ae}}=0)\) et dans lequel les flux de fluide sont nuls \((\lbrace {M}_{e}^{\mathrm{ext}}\rbrace =\lbrace {M}_{a}^{\mathrm{ext}}\rbrace =0)\) .
Compte tenu de (21) , de \({f}_{1}={f}_{3}=0\) (équations (17)), le système d’équations (21) a pour solution :
\(\left\lbrace \begin{array}{c}{\alpha}_{e}^{1}={P}_{a}^{0}-{p}_{c}^{0}\\ {\alpha}_{e}^{2}=\frac{{f}_{2}}{{b}_{2}}{\rho}_{e}(1-\exp(-\frac{{b}_{2}}{{a}_{2}}\frac{{\lambda}_{e}}{{N}_{\mathrm{ee}}}t))\\ {\alpha}_{a}^{1}={P}_{a}^{0}\\ {\alpha}_{a}^{2}=\frac{{f}_{2}}{{b}_{2}}{\rho}_{a}(1-\exp(-\frac{{b}_{2}}{{a}_{2}}\frac{{\lambda}_{a}}{{N}_{\mathrm{aa}}}t))\end{array}\right\rbrace\) (23)
On trouve en revenant aux variables nodales :
\(\left\lbrace \begin{array}{c}{P}_{1}\\ {p}_{2}\end{array}\right\rbrace =\left\lbrace \begin{array}{c}{\alpha}_{1}-{\alpha}_{2}\\ {\alpha}_{1}+{\alpha}_{2}\end{array}\right\rbrace\)
\({\left\lbrace \begin{array}{c}{P}_{1}\\ {p}_{2}\end{array}\right\rbrace }_{\mathrm{eau}}=\left\lbrace \begin{array}{c}{P}_{a}^{0}-{p}_{c}^{0}+\frac{{\rho}_{e}g}{2}(1-\exp(-12\frac{{\lambda}_{e}}{{N}_{\mathrm{ee}}}t))\\ {P}_{a}^{0}-{p}_{c}^{0}-\frac{{\rho}_{e}g}{2}(1-\exp(-12\frac{{\lambda}_{e}}{{N}_{\mathrm{ee}}}t))\end{array}\right\rbrace\) (24)
\({\left\lbrace \begin{array}{c}{P}_{1}\\ {p}_{2}\end{array}\right\rbrace }_{\mathrm{air}}=\left\lbrace \begin{array}{c}{P}_{a}^{0}+\frac{{\rho}_{a}g}{2}\exp(-12\frac{{\lambda}_{a}}{{N}_{\mathrm{aa}}}t)\\ {P}_{a}^{0}-\frac{{\rho}_{a}g}{2}\exp(-12\frac{{\lambda}_{a}}{{N}_{\mathrm{aa}}}t)\end{array}\right\rbrace\) (25)
et la pression capillaire définie comme la différence entre la pression d’air et la pression d’eau a pour valeur :
\({\left\lbrace \begin{array}{c}{P}_{1}\\ {p}_{2}\end{array}\right\rbrace }_{\mathrm{capillaire}}={\left\lbrace \begin{array}{c}{P}_{1}\\ {p}_{2}\end{array}\right\rbrace }_{\mathrm{air}}-{\left\lbrace \begin{array}{c}{P}_{1}\\ {p}_{2}\end{array}\right\rbrace }_{\mathrm{eau}}\)
Nous avons considéré le cas de calcul suivant :
\(\begin{array}{c}S\ne 1;\frac{\partial S}{\partial {p}_{c}}=0;{K}_{s}=\infty \\ {N}_{\mathrm{ee}}=S\frac{\varphi}{{K}_{e}};{N}_{\mathrm{aa}}=(1-S)\frac{\varphi}{{p}_{a}}\end{array}\)
Grandeur de référence#
Evolution de la pression capillaire et de la pression d’air sec en fonction du temps aux points
\(C,D(z=h)\)
\(A,B(z=0)\)
Pour la discrétisation quadratique, vérification de la valeur constante de la pression aux nœuds \(E,F(z=\frac{h}{2})\) .
Incertitudes#
Solution analytique sur les équations d’hydrauliques donc incertitudes négligeables pour les modélisations A, B, C.
Attention ces solutions analytiques ne s’appliquent pas aux modélisations sélectives ou lumpées (D et E). En effet, dans ce dernier cas, les intégrations sont faites aux nœuds et non plus aux points de Gauss. En effet l’intégration par point de Gauss est exacte en \(\mathrm{1D}\) pour des polynôme de degré inférieur ou égal à 3 et donc pour toutes les intégrales présentées dans l’équation (9). En revanche la méthode d’intégration au sommet n’est exacte que pour les polynômes de degré 1. On voit donc que les termes de la matrice \([A]\) seront sous intégrés. Il est donc logique que sur un maillage unitaire comme ici les résultats obtenus ici ne soient pas exacts. On conserve cependant ces tests mais avec un résultat en «non régression».
Références bibliographiques#
Thermo-hydro-mécanique des milieux poreux dans Code_Aster – Note EDF, HI-74/99/011/A
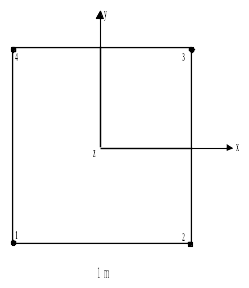
Modélisation A#
Caractéristiques de la modélisation A#
Modélisation plane : D_PLAN_HHM

1 maille DPQ8de la modélisation D_PLAN_HHM: HHM_ DPQ8
Résultat de la modélisation A#
Discrétisation en temps: Plusieurs pas de temps (16) pour étudier l’évolution de la pression pendant la phase transitoire jusqu’à se stabiliser. Le schéma en temps est implicite \((\theta =1)\) .
Liste des instants de calcul en secondes:
\(1,5,10,50,100,500,{10}^{3},5.\times {10}^{3},{10}^{4},5.\times {10}^{4},{10}^{5},5.\times {10}^{5},{10}^{6},5.\times {10}^{6},{10}^{7},{10}^{10}.\)
Les inconnues nodales : pressions de fluides évaluées dans Code_Aster sont des variations par rapport aux pressions initiales, c’est pourquoi ce tableau présente des variations de pression dans notre comparaison entre le calcul Code_Aster et la solution de référence. De plus les variables de pression utilisées dans Code_Aster pour évaluer les lois de comportement sont la pression totale du gaz et la pression capillaire.
Nœud / point |
Numéro d’ordre / instant \((s)\) |
Valeur |
Pression \((\mathrm{Pa})\) |
Tolérance |
\(1,2,5/A,B\) |
\(1(t=1s)\) |
\(\mathrm{PRE1}\) |
-8,565.10-3 |
\({10}^{-4}\) |
\(2(t=5s)\) |
\(\mathrm{PRE1}\) |
-4,282.10-2 |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE1}\) |
-8,565.10-2 |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE1}\) |
-4,282.10-1 |
\(1\text{\%}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE1}\) |
-4,26.10+1 |
\(1\text{\%}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE1}\) |
-4,996.10+3 |
\(1\text{\%}\) |
|
\(1(t=1s)\) |
\(\mathrm{PRE2}\) |
6,796.10-6 |
\({10}^{-4}\) |
|
\(2(t=5s)\) |
\(\mathrm{PRE2}\) |
3,398.10-5 |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE2}\) |
6,796.10-5 |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE2}\) |
3,398.10-4 |
\({10}^{-4}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE2}\) |
3,384.10-2 |
\({10}^{-4}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE2}\) |
3,964 |
\({10}^{-3}\) |
|
\(3,4,7/C,D\) |
\(1(t=1s)\) |
\(\mathrm{PRE1}\) |
8,565.10-3 |
\({10}^{-4}\) |
\(2(t=5s)\) |
\(\mathrm{PRE1}\) |
4,282.10-2 |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE1}\) |
8,565.10-2 |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE1}\) |
4,282.10-1 |
\(1\text{\%}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE1}\) |
4,26.10+1 |
\(1\text{\%}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE1}\) |
4,996.10+3 |
\(1\text{\%}\) |
|
\(1(t=1s)\) |
\(\mathrm{PRE2}\) |
-6,796.10-6 |
\({10}^{-4}\) |
|
\(2(t=5s)\) |
\(\mathrm{PRE2}\) |
-3,398.10-5 |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE2}\) |
-6,796.10-5 |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE2}\) |
-3,398.10-4 |
\({10}^{-4}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE2}\) |
-3,384.10-2 |
\({10}^{-4}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE2}\) |
-3,964 |
\({10}^{-3}\) |
Modélisation B#
Caractéristiques de la modélisation B#
Modélisation volumique : 3D_HHM

1 maille HEXA20 de la modélisation 3D_HHM : HHM_HEXA20
Résultat de la modélisation B#
Discrétisation en temps : Plusieurs pas de temps (16) pour étudier l’évolution de la pression pendant la phase transitoire jusqu’à se stabiliser. Le schéma en temps est implicite \((\theta =1)\) .
Liste des instants de calcul en secondes:
\(1,5,10,50,100,500,{10}^{3},5.\times {10}^{3},{10}^{4},5.\times {10}^{4},{10}^{5},5.\times {10}^{5},{10}^{6},5.\times {10}^{6},{10}^{7},{10}^{10}.\)
Les inconnues nodales de pression de fluide évaluées dans Code_Aster sont des variations par rapport aux pressions initiales, c’est pourquoi ce tableau présente des variations de pression dans notre comparaison entre le calcul Code_Aster et la solution de référence. De plus les variables de pression utilisées dans Code_Aster pour évaluer les lois de comportement sont la pression totale du gaz et la pression capillaire.
Nœud / point |
Numéro d’ordre / instant \((s)\) |
Valeur |
Pression \((\mathrm{Pa})\) |
Tolérance |
13 à 20 / \(A\) et \(B\) |
\(1(t=1s)\) |
\(\mathrm{PRE1}\) |
-8,565.10-3 |
\({10}^{-4}\) |
\(2(t=5s)\) |
\(\mathrm{PRE1}\) |
-4,282.10-2 |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE1}\) |
-8,565.10-2 |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE1}\) |
-4,282.10-1 |
\(1\text{\%}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE1}\) |
-4,26.10+1 |
\(1\text{\%}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE1}\) |
-4,996.10+3 |
\(1\text{\%}\) |
|
\(1(t=1s)\) |
\(\mathrm{PRE2}\) |
6,796.10-6 |
\({10}^{-4}\) |
|
\(2(t=5s)\) |
\(\mathrm{PRE2}\) |
3,398.10-5 |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE2}\) |
6,796.10-5 |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE2}\) |
3,398.10-4 |
\({10}^{-4}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE2}\) |
3,384.10-2 |
\({10}^{-4}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE2}\) |
3,964 |
\({10}^{-3}\) |
|
1 à 8 / \(C\) et \(D\) |
\(1(t=1s)\) |
\(\mathrm{PRE1}\) |
8,565.10-3 |
\({10}^{-4}\) |
\(2(t=5s)\) |
\(\mathrm{PRE1}\) |
4,288.10-2 |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE1}\) |
8,565.10-2 |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE1}\) |
4,282.10-1 |
\(1\text{\%}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE1}\) |
4,26.10+1 |
\(1\text{\%}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE1}\) |
4,996.10+3 |
\(1\text{\%}\) |
|
\(1(t=1s)\) |
\(\mathrm{PRE2}\) |
-6,796.10-6 |
\({10}^{-4}\) |
|
\(2(t=5s)\) |
\(\mathrm{PRE2}\) |
-3,398.10-5 |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE2}\) |
-6,796.10-5 |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE2}\) |
-3,398.10-4 |
\({10}^{-4}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE2}\) |
-3,384.10-2 |
\({10}^{-4}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE2}\) |
-3,964 |
\({10}^{-3}\) |
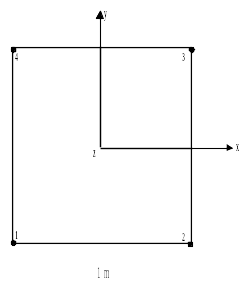
Modélisation C#
Caractéristiques de la modélisation C#
Modélisation plane: D_PLAN_HHM

2 mailles DPTR6 de la modélisation D_PLAN_HHM : HHM_ DPTR6
Résultat de la modélisation C#
Discrétisation en temps: Plusieurs pas de temps (16) pour étudier l’évolution de la pression pendant la phase transitoire jusqu’à se stabiliser. Le schéma en temps est implicite \((\theta =1)\) .
Liste des instants de calcul en secondes:
\(1,5,10,50,100,500,{10}^{3},5.\times {10}^{3},{10}^{4},5.\times {10}^{4},{10}^{5},5.\times {10}^{5},{10}^{6},5.\times {10}^{6},{10}^{7},{10}^{10}.\)
Les inconnues nodales : pressions de fluides évaluées dans Code_Aster sont des variations par rapport aux pressions initiales, c’est pourquoi ce tableau présente des variations de pression dans notre comparaison entre le calcul Code_Aster et la solution de référence. De plus les variables de pression utilisées dans Code_Aster pour évaluer les lois de comportement sont la pression totale du gaz et la pression capillaire.
Nœud / point |
Numéro d’ordre / instant \((s)\) |
Valeur |
Pression \((\mathrm{Pa})\) |
Tolérance |
1,2 / \(A\) et \(B\) |
\(1(t=1s)\) |
\(\mathrm{PRE1}\) |
-8,565.10-3 |
\({10}^{-4}\) |
\(2(t=5s)\) |
\(\mathrm{PRE1}\) |
-4,282.10-2 |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE1}\) |
-8,565.10-2 |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE1}\) |
-4,282.10-1 |
\(1\text{\%}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE1}\) |
-4,26.10+1 |
\(1\text{\%}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE1}\) |
-4,996.10+3 |
\(1\text{\%}\) |
|
\(1(t=1s)\) |
\(\mathrm{PRE2}\) |
6,796.10-6 |
\({10}^{-4}\) |
|
\(2(t=5s)\) |
\(\mathrm{PRE2}\) |
3,398.10-5 |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE2}\) |
6,796.10-5 |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE2}\) |
3,398.10-4 |
\({10}^{-4}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE2}\) |
3,384.10-2 |
\({10}^{-4}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE2}\) |
3,964 |
\({10}^{-3}\) |
|
3,4 / \(C\) et \(D\) |
\(1(t=1s)\) |
\(\mathrm{PRE1}\) |
8,565.10-3 |
\({10}^{-4}\) |
\(2(t=5s)\) |
\(\mathrm{PRE1}\) |
4,282.10-2 |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE1}\) |
8,565.10-2 |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE1}\) |
4,282.10-1 |
\(1\text{\%}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE1}\) |
4,26.10+1 |
\(1\text{\%}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE1}\) |
4,996.10+3 |
\(1\text{\%}\) |
|
\(1(t=1s)\) |
\(\mathrm{PRE2}\) |
-6,796.10-6 |
\({10}^{-4}\) |
|
\(2(t=5s)\) |
\(\mathrm{PRE2}\) |
-3,398.10-5 |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE2}\) |
-6,796.10-5 |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE2}\) |
-3,398.10-4 |
\({10}^{-4}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE2}\) |
-3,384.10-2 |
\({10}^{-4}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE2}\) |
-3,964 |
\({10}^{-3}\) |
Modélisation D#
Caractéristiques de la modélisation D#
Modélisation plane: D_PLAN_HHMS
1 maille DPQ8 de la modélisation D_PLAN_HHMS : HHM_DPQ8S
Résultat de la modélisation D#
Nœud / point |
Numéro d’ordre / instant \((s)\) |
Valeur |
Pression \((\mathrm{Pa})\) |
Tolérance |
1,2 / \(A\) et \(B\) |
\(1(t=1s)\) |
\(\mathrm{PRE1}\) |
\(-2,8549\times {10}^{-3}\) |
\({10}^{-4}\) |
\(2(t=5s)\) |
\(\mathrm{PRE1}\) |
\(-0,01427\) |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE1}\) |
\(-0,028549\) |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE1}\) |
\(-0,1427\) |
\({10}^{-2}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE1}\) |
\(-14,24\) |
\({10}^{-2}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE1}\) |
\(-4995,0\) |
\({10}^{-2}\) |
|
\(1(t=1s)\) |
\(\mathrm{PRE2}\) |
\(2,2656\times {10}^{-6}\) |
\({10}^{-4}\) |
|
\(2(t=5s)\) |
\(\mathrm{PRE2}\) |
\(1,1328\times {10}^{-5}\) |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE2}\) |
\(2,2656\times {10}^{-5}\) |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE2}\) |
\(1,133\times {10}^{-4}\) |
\({10}^{-4}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE2}\) |
\(0,011301\) |
\({10}^{-4}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE2}\) |
\(3,9647\) |
\({10}^{-3}\) |
|
3,4 / \(C\) et \(D\) |
\(1(t=1s)\) |
\(\mathrm{PRE1}\) |
\(2,8549\times {10}^{-3}\) |
\({10}^{-4}\) |
\(2(t=5s)\) |
\(\mathrm{PRE1}\) |
\(0,01427\) |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE1}\) |
\(0,028549\) |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE1}\) |
\(0,1427\) |
\({10}^{-2}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE1}\) |
\(14,24\) |
\({10}^{-2}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE1}\) |
\(4997,0\) |
\({10}^{-2}\) |
|
\(1(t=1s)\) |
\(\mathrm{PRE2}\) |
\(-2,2656\times {10}^{-6}\) |
\({10}^{-4}\) |
|
\(2(t=5s)\) |
\(\mathrm{PRE2}\) |
\(-1,1328\times {10}^{-5}\) |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE2}\) |
\(-2,2656\times {10}^{-5}\) |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE2}\) |
\(-1,133\times {10}^{-4}\) |
\({10}^{-4}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE2}\) |
\(-0,0113\) |
\({10}^{-4}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE2}\) |
\(-3,9647\) |
\({10}^{-3}\) |
Modélisation E#
Caractéristiques de la modélisation E#
Modélisation plane: D_PLAN_HHMD
1 maille DPQ8 de la modélisation D_PLAN_HHM : HHM_DPQ8D
Résultat de la modélisation E#
Nœud / point |
Numéro d’ordre / instant \((s)\) |
Valeur |
Pression \((\mathrm{Pa})\) |
Tolérance |
1,2 / \(A\) et \(B\) |
\(1(t=1s)\) |
\(\mathrm{PRE1}\) |
\(-2,85486\times {10}^{-3}\) |
\({10}^{-4}\) |
\(2(t=5s)\) |
\(\mathrm{PRE1}\) |
\(-0,0142743\) |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE1}\) |
\(-0,0285487\) |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE1}\) |
\(-0,14274\) |
\({10}^{-4}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE1}\) |
\(-14,2406\) |
\({10}^{-4}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE1}\) |
\(-4995,06\) |
\({10}^{-4}\) |
|
\(1(t=1s)\) |
\(\mathrm{PRE2}\) |
\(-2,26558\times {10}^{-6}\) |
\({10}^{-4}\) |
|
\(2(t=5s)\) |
\(\mathrm{PRE2}\) |
\(1,13279\times {10}^{-5}\) |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE2}\) |
\(2,26557\times {10}^{-5}\) |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE2}\) |
\(1,132764\times {10}^{-4}\) |
\({10}^{-4}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE2}\) |
\(0,0113012\) |
\({10}^{-4}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE2}\) |
\(3,96734\) |
\({10}^{-4}\) |
|
3,4 / \(C\) et \(D\) |
\(1(t=1s)\) |
\(\mathrm{PRE1}\) |
\(2,85488\times {10}^{-3}\) |
\({10}^{-4}\) |
\(2(t=5s)\) |
\(\mathrm{PRE1}\) |
\(-0,0142743\) |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE1}\) |
\(0,0285487\) |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE1}\) |
\(0,14274\) |
\({10}^{-3}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE1}\) |
\(14,2407\) |
\({10}^{-4}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE1}\) |
\(4996,93\) |
\({10}^{-4}\) |
|
\(1(t=1s)\) |
\(\mathrm{PRE2}\) |
\(-2,26557\times {10}^{-6}\) |
\({10}^{-4}\) |
|
\(2(t=5s)\) |
\(\mathrm{PRE2}\) |
\(-1,13279\times {10}^{-5}\) |
\({10}^{-4}\) |
|
\(3(t=10s)\) |
\(\mathrm{PRE2}\) |
\(-2,26557\times {10}^{-5}\) |
\({10}^{-4}\) |
|
\(4(t=50s)\) |
\(\mathrm{PRE2}\) |
\(-1,13276\times {10}^{-4}\) |
\({10}^{-4}\) |
|
\(8(t={5.10}^{3}s)\) |
\(\mathrm{PRE2}\) |
\(-0,0113012\) |
\({10}^{-4}\) |
|
\(16(t={10}^{10}s)\) |
\(\mathrm{PRE2}\) |
\(-3,96734\) |
\({10}^{-4}\) |
Synthèse des résultats#
Les valeurs de Code_Aster sont en bon accord avec les valeurs de référence.