r5.05.07 Matrices gyroscopiques des poutres droites et des disques#
Résumé:
Ce document présente la formulation des matrices d’amortissement et de raideur gyroscopiques des éléments poutres, volumiques et discrets.
Les poutres sont uniquement des poutres droites (Éléments POU_D_T et POU_D_E). La section est constante sur la longueur et de forme circulaire. Le matériau est homogène, isotrope.
Les disques sont des cylindres de révolution dont l’axe est confondu avec l‘axe de la poutre. Le disque est supposé indéformable.
Les hypothèses retenues sont les suivantes:
Hypothèse de Timoshenko: le cisaillement transverse et tous les termes d’inertie sont pris en compte. Cette hypothèse est à utiliser pour des élancements faibles (Éléments POU_D_T).
Hypothèse d’Euler: le cisaillement transverse est négligé. Cette hypothèse est vérifiée pour de forts élancements (Éléments POU_D_E).
La vitesse de rotation propre (suivant l’axe de la poutre) peut être constante ou variable.
Dans Code_Aster, la convention adoptée définit le sens positif suivant l’axe de rotation comme étant le sens trigonométrique usuel de rotation.
Le disque circulaire#
L’objectif de ce chapitre est de caractériser les matrices gyroscopiques d’un disque circulaire infiniment rigide, soumis à une vitesse de rotation constante ou variable.
Les caractéristiques du disque sont les suivantes:
axe du disque confondu avec l’axe de la fibre neutre de la poutre (axe \(\overrightarrow{x}\) )
centre de gravité du disque: \(C\)
rayon intérieur: \({R}_{i}\)
rayon extérieur: \({R}_{e}\)
épaisseur: \(h\)
masse volumiquesupposée uniforme : \(\rho\)
Valeurs déduites :
masse du disque: \(M=\pi \rho h({R}_{e}^{2}-{R}_{i}^{2})\)
moment d’inertie massique / axes \(y\) ou \(z\) calculé au centre de gravité \(C\) :
\({I}_{yz}=\frac{M}{12}(3.{R}_{e}^{2}+3.{R}_{i}^{2}+{h}^{2})\)
moment d’inertie massique par rapport à l’axe \(x\) calculé au centre de gravité \(C\) :
\({I}_{x}=\frac{M}{2}({R}_{e}^{2}+{R}_{i}^{2})\)
Remarques:
Les axes \(C\overrightarrow{x}\) , \(C\overrightarrow{y}\) et \(C\overrightarrow{z}\) étant axes principaux d’inertie du disque, les produits d’inertie \({I}_{xy}\) , \({I}_{yz}\) et \({I}_{xz}\) sont nuls.
La symétrie du disque par rapport aux axes \(C\overrightarrow{y}\) et \(C\overrightarrow{z}\) impose: \({I}_{yz}={I}_{y}={I}_{z}\)
Le déplacement du centre du disque est donné par: \(u.\overrightarrow{x}+v.\overrightarrow{y}+w.\overrightarrow{z}\)
On note:
\({\overrightarrow{\Omega}}_{R/\mathrm{R0}}\) : le vecteur vitesse de rotation du disque
\(\overrightarrow{x}.{\overrightarrow{\Omega}}_{R/\mathit{R0}}=\dot{\phi }(t)\) : vitesse de rotation propre
Calcul de l’énergie cinétique du disque#
On calcule l’énergie cinétique du disque en appliquant la formule de Huygens:
\(T=\frac{1}{2}M.{({\overrightarrow{V}}_{C,D/\mathit{R0}})}^{2}+\frac{1}{2}{\overrightarrow{\Omega}}_{R/\mathit{R0}}.\left[J\right].{\overrightarrow{\Omega}}_{R/\mathit{R0}}\)
\(T=\frac{1}{2}M.{({\dot{u}}^{2}+{\dot{v}}^{2}+{\dot{w}}^{2})}^{2}+\frac{1}{2}{\overrightarrow{\Omega}}_{R/\mathit{R0}}.\left[J\right].{\overrightarrow{\Omega}}_{R/\mathit{R0}}\)
avec: \(\left[J\right]=\left[\begin{array}{ccc}{I}_{x}& 0& 0\\ 0& {I}_{y}& 0\\ 0& 0& {I}_{z}\end{array}\right]\) avec \({I}_{yz}={I}_{y}={I}_{z}\)
En développant l’expression précédente, on obtient:
\(T=\frac{1}{2}\rho .{({\dot{u}}^{2}+{\dot{v}}^{2}+{\dot{w}}^{2})}^{2}+\frac{1}{2}{I}_{yz}.({\dot{\theta}}_{y}^{2}+{\dot{\theta}}_{z}^{2})+\frac{1}{2}{I}_{x}.({\dot{\phi }}^{2}+2{\dot{\theta}}_{y}.\dot{\phi }.{\theta}_{z})\)
Les différents termes de l’énergie cinétique représentent:
pour le premier terme, l’énergie cinétique de translation,
pour le deuxième terme, l’énergie cinétique de rotation,
pour le terme \(\frac{1}{2}{I}_{x}.{\dot{\phi }}^{2}\) , l’énergie «propre» de rotation,
et pour le terme \({I}_{x}.({\dot{\theta}}_{y}.\dot{\phi }.{\theta}_{z})\) , l’effet gyroscopique.
Calcul des équations d’équilibre#
Les équations de Lagrange sont utilisés pour formuler l’équilibre dynamique du disque. Dans ce cas particulier, l’énergie de déformation est nulle (disque infiniment rigide) et aucun effort extérieur n’est considéré, on a donc:
\(\frac{d}{\text{dt}}(\frac{\partial T}{\partial {\dot{q}}_{i}})-\frac{\partial T}{\partial {q}_{i}}=0\) avec :math:`langle qrangle =langle uvw{theta}_{y}{theta}_{z}rangle ` : vecteur des degrés de liberté de l’élément disque.
On ne tient pas compte du degré de liberté \(\phi\) car on considère que la vitesse de rotation propre est imposée et donc connue. On obtient alors les équations suivantes:
\(\lbrace \begin{array}{c}\frac{d}{\text{dt}}(\frac{\partial T}{\partial \dot{u}})-\frac{\partial T}{\mathit{\delta u}}=M.\ddot{u}\\ \frac{d}{\text{dt}}(\frac{\partial T}{\partial \dot{v}})-\frac{\partial T}{\mathit{\delta v}}=M.\ddot{v}\\ \frac{d}{\text{dt}}(\frac{\partial T}{\partial \dot{w}})-\frac{\partial T}{\mathit{\delta w}}=M.\ddot{w}\\ \frac{d}{\text{dt}}(\frac{\partial T}{\partial {\dot{\theta}}_{y}})-\frac{\partial T}{\partial {\theta}_{y}}={I}_{yz}.{\ddot{\theta}}_{y}+{I}_{x}.\dot{\phi }.{\dot{\theta}}_{z}+{I}_{x}.\ddot{\phi }.{\theta}_{z}\\ \frac{d}{\text{dt}}(\frac{\partial T}{\partial {\dot{\theta}}_{z}})-\frac{\partial T}{\partial {\theta}_{z}}={I}_{yz}.{\ddot{\theta}}_{z}-{I}_{x}.\dot{\phi }.{\dot{\theta}}_{y}\end{array}\)
Ces équations peuvent se mettre sous la forme:
:math:`left[Mright]langle ddot{q}rangle +left[{C}_{mathit{gyro}}right]langle dot{q}rangle +(left[Kright]+left[{K}_{mathit{gyro}}right])langle qrangle =langle 0rangle `
La matrice d’amortissement gyroscopique du disque s’obtient à partir du moment d’inertie \({I}_{x}\) . Elle est antisymétrique, et sa contribution doit être multipliée par la vitesse angulaire propre \(\dot{\varphi}\) .
\(\left[{C}_{\mathit{gyro}}\right]=\dot{\varphi}.\left[\begin{array}{cccccc}0& 0& 0& -& 0& 0\\ 0& 0& 0& -& 0& 0\\ 0& 0& 0& -& 0& 0\\ -& -& -& -& -& -\\ 0& 0& 0& -& 0& {I}_{\text{x}}\\ 0& 0& 0& -& -{I}_{\text{x}}& 0\end{array}\right]\)
avec \(\langle uvw{\theta}_{x}{\theta}_{y}{\theta}_{z}\rangle\) vecteur des degrés de libertés de l’élément disque et tel que: \({\dot{\theta}}_{x}=\dot{\phi }\)
Le tiret correspond au degré de liberté de rotation suivant l’axe de la poutre et conduit bien évidemment à des termes nuls.
La matrice de raideur gyroscopique du disque s’obtient aussi à partir du moment d’inertie \({I}_{x}\) . Sa contribution doit être multipliée par l’accélération angulaire propre \(\ddot{\phi }\) .
\(\left[{K}_{\mathit{gyro}}\right]=\ddot{\phi }.\left[\begin{array}{cccccc}0& 0& 0& -& 0& 0\\ 0& 0& 0& -& 0& 0\\ 0& 0& 0& -& 0& 0\\ -& -& -& -& -& -\\ 0& 0& 0& -& 0& {I}_{\text{x}}\\ 0& 0& 0& -& 0& 0\end{array}\right]\)
L’élément 3D volumique#
La mise en équation d’une structure mobile peut se faire, soit dans le repère galiléen fixe (OXYZ), soit dans le repère d’inertie (O’X’Y’Z”) attaché à la structure.
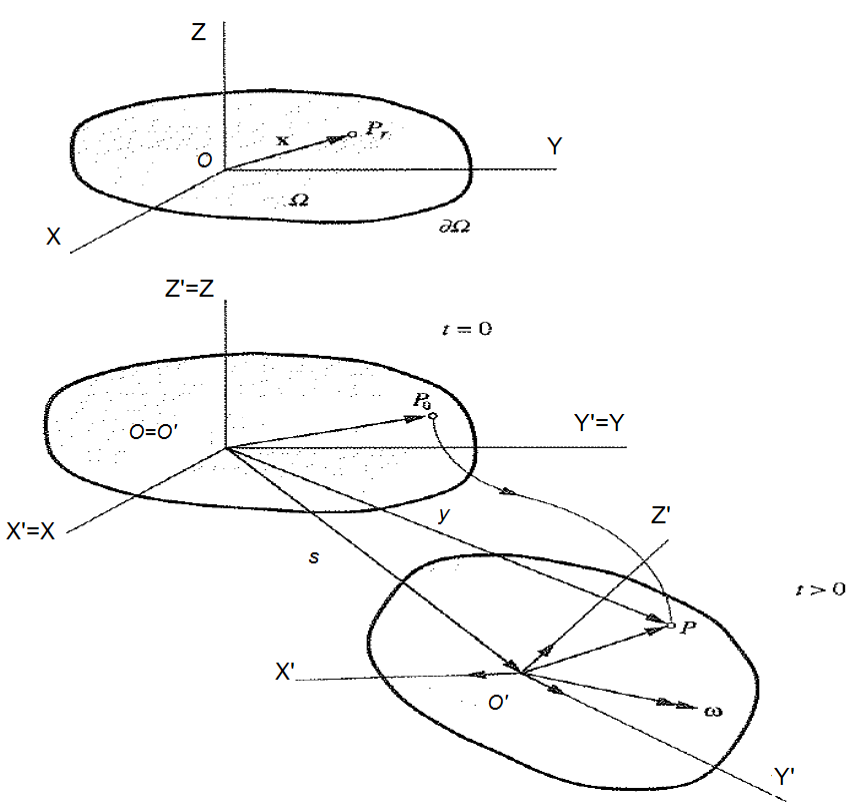
Pour une analyse dynamique, le choix du repère d’inertie comme système de référence permet de simplifier la formulation des équations différentielles régissant leur comportement dynamique.
Ce choix permet de caractériser l’effet Coriolis (effet gyroscopique vu du rotor) qui s’ajoute à l’amortissement. Aussi, deux autres effets de type raideur apparente s’ajoutent à la matrice de raideur: il s’agit de l’effet centrifuge et de l’effet gyroscopique associé à la variation de vitesse.
Position en mouvement dans le repère tournant#
En toute généralité, on considèrera que référentiel mobile, dont l’origine est caractérisée par une translation \(\mathrm{s}(t){=}^{t}({s}_{x},{s}_{y},{s}_{y})\) par rapport au repère d’inertie, tourne à la vitesse angulaire \(\omega {=}^{t}({\omega}_{x},{\omega}_{y},{\omega}_{z})\) autour d’un axe quelconque passant par l’origine. Il est important de noter que les composantes de la vitesse de rotation sont mesurées dans repère corotationnel. On notera \(\omega '\) la projection de cette vitesse de rotation dans le repère fixe, ie \(\omega ={t}^{}\mathrm{R}\omega '\) où \(\mathrm{R}(t)\) est la matrice de changement de base, formé des cosinus directeurs des vecteurs de base du repère d’inertie, exprimés dans le référentiel fixe.
La position d’un point P dans le référentiel d’inertie (OXYZ), notée \(\mathrm{y}\) , a alors pour expression :
\(\mathrm{y}=\mathrm{s}(t)+\mathrm{R}(t)\left[\mathrm{x}+\mathrm{u}(\mathrm{x},t)\right]\)
où \(\mathrm{x}\) est la position initiale du point P dans le système inertiel et \(\mathrm{u}\) est le vecteur déplacement résultant de la déformation dynamique de la structure à un instant donné t.
La vitesse absolue \(\dot{\mathrm{y}}\) du point P est définie comme étant la dérivée première par rapport au temps du vecteur \(\mathrm{y}\) . Elle s’écrit :
\(\dot{\mathrm{y}}=\dot{\mathrm{s}}+\dot{\mathrm{R}}(\mathrm{x}+\mathrm{u})+\mathrm{R}\dot{\mathrm{u}}\)
où \(\dot{\mathrm{s}}\) est la vitesse de translation de l’origine O” du repère tournant, écrite dans le repère fixe.
On démontre que la dérivée \(\dot{\mathrm{R}}\) de la matrice de changement de base peut également s’écrire comme étant le produit vectoriel entre le vecteur de rotation dans le repère fixe \(\omega '\) et la matrice de changement de base \(\mathrm{R}\) ou alors comme étant le produit de la matrice \(\mathrm{R}\) et de la matrice antisymétrique \(\Omega\) qui englobe les trois composantes du tenseur de rotation dans le repère d’inertie \(\omega\) :
\(\dot{\mathrm{R}}=\omega '\mathrm{\wedge }\mathrm{R}=\mathrm{R}\Omega\) avec \(\Omega =\left[\begin{array}{ccc}0& -{\omega}_{z}& {\omega}_{y}\\ {\omega}_{z}& 0& -{\omega}_{x}\\ -{\omega}_{y}& {\omega}_{x}& 0\end{array}\right]\)
En insérant cette définition dans l’expression de la vitesse absolue, il en résulte que :
\(\dot{\mathrm{y}}=\dot{\mathrm{s}}+\omega '\mathrm{\wedge }\mathrm{R}(\mathrm{x}+\mathrm{u})+\mathrm{R}\dot{\mathrm{u}}\)
L’accélération absolue \(\ddot{\mathrm{y}}\) du point P est définie comme étant la dérivée seconde par rapport au temps du vecteur vitesse \(\mathrm{y}\) . Elle s’écrit :
\(\ddot{\mathrm{y}}=\ddot{\mathrm{s}}+\dot{\omega}'\mathrm{\wedge }\mathrm{R}(\mathrm{x}+\mathrm{u})+\omega '\mathrm{\wedge }['\omega '\mathrm{\wedge }\mathrm{R}(\mathrm{x}+\mathrm{u})]+2\omega '\mathrm{\wedge }\mathrm{R}\dot{\mathrm{u}}+\mathrm{R}\ddot{\mathrm{u}}\)
avec \(\ddot{\mathrm{s}}\) l’accélération de translation de l’origine O” du repère tournant, écrite dans le repère fixe et \(\dot{\omega}'\) est l’accélération instantanée de rotation définie par la relation \(\dot{\omega}={t}^{}\mathrm{R}\dot{\omega}'\) .
Par souci de clarté et sans perdre la généralité, on supposera dans la suite du document que l’origine O” du repère tournant est fixe, ie. \(\dot{\mathrm{s}}=\ddot{\mathrm{s}}=0\) .
Après pré-multiplication par la transformation inverse \({t}^{}\mathrm{R}\) , on obtient alors la vitesse et l’accélération absolues exprimées dans le référentiel mobile :
\({t}^{}\mathrm{R}\dot{\mathrm{y}}=\dot{\mathrm{u}}+\omega \mathrm{\wedge }\mathrm{R}(\mathrm{x}+\mathrm{u})\)
\({t}^{}\mathrm{R}\ddot{\mathrm{y}}=\ddot{\mathrm{u}}+\dot{\omega}\mathrm{\wedge }(\mathrm{x}+\mathrm{u})+\omega \mathrm{\wedge }[\omega \mathrm{\wedge }(\mathrm{x}+\mathrm{u})]+2\omega \mathrm{\wedge }\dot{\mathrm{u}}\)
Dans cette expression, qui représente le théorème de la composition des accélérations d’un point matériel, on reconnaît les termes :
d’accélération relative \(\ddot{\mathrm{u}}\) , qui contribue à la matrice de masse;
d’accélération d’entraînement \(\dot{\omega}\mathrm{\wedge }(\mathrm{x}+\mathrm{u})+\omega \mathrm{\wedge }[\omega \mathrm{\wedge }(\mathrm{x}+\mathrm{u})]\) (somme de l’effet Euler due à l’accélération de rotation et de l’effet d’adoucissement centrifuge, qui contribuent à la matrice de raideur);
d’accélération complémentaire ou de Coriolis \(2\omega \mathrm{\wedge }\dot{\mathrm{u}}\) , qui contribue à la matrice d’amortissement.
Expression des énergies cinétique et potentielle#
Sous sa forme générale, l’énergie cinétique est obtenue à partir de la vitesse absolue \(\mathrm{y}\) comme suit :
\(\mathrm{T}=\frac{1}{2}\underset{\Omega}{\int}\rho {\dot{\mathrm{y}}}^{t}\dot{\mathrm{y}}\text{d}\Omega\)
Le développement des termes donne l’expression suivante en fonction du déplacement \(\mathrm{u}\) :
\(\begin{array}{c}\mathrm{T}=\frac{1}{2}\underset{\Omega}{\int}\rho {\dot{\mathrm{u}}}^{t}\dot{\mathrm{u}}\text{d}\Omega +\underset{\Omega}{\int}\rho {\dot{\mathrm{u}}}^{t}\Omega \mathrm{u}\text{d}\Omega -\frac{1}{2}\underset{\Omega}{\int}\rho {\mathrm{u}}^{t}{\Omega}^{2}\mathrm{u}\text{d}\Omega -\underset{\Omega}{\int}\rho {\mathrm{u}}^{t}{\Omega}^{2}\mathrm{x}\text{d}\Omega +\underset{\Omega}{\int}\rho {\dot{\mathrm{u}}}^{t}\Omega \mathrm{x}\text{d}\Omega \\ -\frac{1}{2}\underset{\Omega}{\int}\rho {\mathrm{x}}^{t}{\Omega}^{2}\mathrm{x}\text{d}\Omega \end{array}\)
L’énergie potentielle du système (énergie de déformation interne et travail des forces externes) a pour expression classique :
\(\mathrm{U}=\frac{1}{2}\underset{\Omega}{\int}{\varepsilon}^{t}\Lambda \varepsilon \text{d}\Omega -\underset{\Omega}{\int}{\mathrm{u}}^{t}\mathrm{f}\text{d}\Omega -\underset{\partial {\Omega}_{\sigma}}{\int}{\mathrm{u}}^{t}\mathrm{t}\text{d}(\partial \Omega )\)
où \(\varepsilon\) est le vecteur associé au tenseur des déformations, \(\Lambda\) est la matrice de comportement et où \(\mathrm{f}\) et \(\mathrm{t}\) sont, respectivement, les vecteurs des forces volumiques et surfaciques externes.
On approche le vecteur déplacement par la méthode des éléments finis. Pour ce faire, on utilisera les fonctions de forme classiques décrites dans le document [R3.01.01]. Le déplacement s’écrit alors sous la forme du produit d’une matrice d’interpolation des déplacements, notée \(\mathrm{B}\) , et d’un vecteur des coordonnées généralisées \(\mathrm{q}\) .
Les énergies cinétique et potentielle du corps déformable s’écrivent alors en fonction des matrices structurelles comme suit :
\(\begin{array}{c}\mathrm{T}=\frac{1}{2}{\dot{\mathrm{q}}}^{t}\left[\mathrm{M}\right]\dot{\mathrm{q}}+\frac{1}{2}{\dot{\mathrm{q}}}^{t}\left[\mathrm{G}\right]\mathrm{q}-\frac{1}{2}{\mathrm{q}}^{t}\left[\mathrm{N}\right]\mathrm{q}-{\mathrm{q}}^{t}\underset{\Omega}{\int}\rho {\mathrm{B}}^{t}{\Omega}^{2}\mathrm{x}\text{d}\Omega +{\dot{\mathrm{q}}}^{t}\underset{\Omega}{\int}\rho {\mathrm{B}}^{t}\Omega \mathrm{x}\text{d}\Omega \\ -\frac{1}{2}\underset{\Omega}{\int}\rho {\mathrm{x}}^{t}{\Omega}^{2}\mathrm{x}\text{d}\Omega \end{array}\)
\(\mathrm{U}=\frac{1}{2}{\mathrm{q}}^{t}\left[\mathrm{K}\right]\mathrm{q}-{\mathrm{q}}^{\mathrm{t}}\underset{\Omega}{\int}{\mathrm{B}}^{t}\mathrm{f}\text{d}\Omega -{\mathrm{q}}^{\mathrm{t}}\underset{\partial {\Omega}_{\sigma}}{\int}{\mathrm{B}}^{t}\mathrm{t}\text{d}(\partial \Omega )\)
Les trois premiers termes de l’énergie cinétique mettent en évidence les matrices :
de masse \(\left[\mathrm{M}\right]=\underset{\Omega}{\int}\rho {\mathrm{B}}^{t}\mathrm{B}\text{d}\Omega\) ;
de Coriolis \(\left[\mathrm{G}\right]=2\underset{\Omega}{\int}\rho {\mathrm{B}}^{t}\Omega \mathrm{B}\text{d}\Omega\) ;
d’accélération centrifuge \(\left[\mathrm{N}\right]=\underset{\Omega}{\int}\rho {\mathrm{B}}^{t}{\Omega}^{2}\mathrm{B}\text{d}\Omega\) .
Le premier terme de l’énergie potentielle met en évidence la matrice de raideur \(\left[\mathrm{K}\right]=\underset{\Omega}{\int}{\nabla \mathrm{B}}^{t}\Lambda \nabla \mathrm{B}\text{d}\Omega\) .
Calcul des équations d’équilibre du système en rotation#
En faisant abstraction d’une éventuelle fonction classique de dissipation, caractérisée par la matrice d’amortissement, les équations de Lagrange pour les énergies cinétique et potentielle du solide s’écrivent comme suit:
\(\frac{\mathrm{d}}{\text{dt}}(\frac{\partial \mathrm{T}}{\partial \dot{\mathrm{q}}})-\frac{\partial \mathrm{T}}{\partial \mathrm{q}}+\frac{\partial \mathrm{U}}{\partial \mathrm{q}}=0\)
En insérant les expressions des énergies dans les équations de Lagrange, on trouve :
\(\begin{array}{c}\frac{\mathrm{d}}{\text{dt}}\left[\left[\mathrm{M}\right]\dot{\mathrm{q}}+\frac{1}{2}\left[\mathrm{G}\right]\mathrm{q}+\frac{1}{2}\left[\mathrm{G}\right]\dot{\mathrm{q}}+\left[\mathrm{N}\right]\mathrm{q}+\underset{\Omega}{\int}\rho {\mathrm{B}}^{t}\Omega \mathrm{x}\text{d}\Omega +\underset{\Omega}{\int}\rho {\mathrm{B}}^{t}{\Omega}^{2}\mathrm{x}\text{d}\Omega +\left[\mathrm{K}\right]\mathrm{q}-\underset{\Omega}{\int}{\mathrm{B}}^{t}\mathrm{f}\text{d}\Omega \right]\\ -\frac{\mathrm{d}}{\text{dt}}\left[\underset{\partial {\Omega}_{\sigma}}{\int}{\mathrm{B}}^{\mathrm{t}}\mathrm{t}\text{d}(\partial \Omega )\right]=0\end{array}\)
En explicitant la dérivée temporelle et en tenant compte de la dérivée de la matrice de transformation dans les équations de Lagrange, on obtient, après simplification et réarrangement des termes, la forme matricielle suivante :
:math:`left[mathrm{M}right]langle ddot{mathrm{q}}rangle +left[mathrm{G}right]langle dot{mathrm{q}}rangle +(left[mathrm{K}right]+left[mathrm{P}right]+left[mathrm{N}right])langle mathrm{q}rangle =langle mathrm{r}rangle `
\(\left[\mathrm{P}\right]\) est la matrice d’accélération angulaire, définie par \(\left[\mathrm{P}\right]=\frac{1}{2}\left[\dot{\mathrm{G}}\right]=\underset{\Omega}{\int}\rho {\mathrm{B}}^{t}\dot{\Omega}\mathrm{B}\text{d}\Omega\) , avec :
\(\dot{\Omega}=\left[\begin{array}{ccc}0& -{\dot{\omega}}_{z}& {\dot{\omega}}_{y}\\ {\dot{\omega}}_{z}& 0& -{\dot{\omega}}_{x}\\ -{\dot{\omega}}_{y}& {\dot{\omega}}_{x}& 0\end{array}\right]\)
\(\langle \mathrm{r}\rangle ` est le vecteur réunissant les termes du membre de droite. Il regroupe les excitations externes :math:\)underset{Omega}{int}{mathrm{B}}^{mathrm{t}}mathrm{f}text{d}Omega +underset{partial {Omega}_{sigma}}{int}{mathrm{B}}^{t}mathrm{t}text{d}(partial Omega )` et la précontrainte centrifuge \(-\underset{\Omega}{\int}\rho {\mathrm{B}}^{t}(\dot{\Omega}\mathrm{x}+{\Omega}^{2}\mathrm{x})\text{d}\Omega\) ).
Description des versions#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
9.4 |
E. BOYERE, X. RAUD EDF/R&D AMA |
Texte initial |
9.8 |
M. Torkhani EDF/R&D AMA |
Correction de coquilles |