v6.08.112 SSND112 – Rotation de réseau et grandes déformations sur un monocristal#
Résumé:
On effectue, sur un problème réduit au point matériel, une traction sur un monocristal
Modélisation A: cette modélisation permet de valider le comportement MONOCRISTAL de type \(\mathrm{CFC}\) .en grandes déformations
Modélisation B: cette modélisation permet de valider le comportement MONOCRISTAL de type \(\mathrm{CFC}\) .en petites déformations avec prise en compte de la rotation du réseau cristallin
Modélisation C: cette modélisation utilise le comportement MONOCRISTAL de type \(\mathrm{CFC}\) .en petites déformations pour comparaison qualitative avec les modélisations A et B.
Modélisation D: cette modélisation utilise le comportement MONOCRISTAL de type \(\mathit{CC}\) .en grandes déformations.
Modélisation E: cette modélisation permet de valider le comportement MONOCRISTAL de type \(\mathrm{CFC}\) .en grandes déformations, de la même façon que la modélisation A, mais avec le comportement \(\text{CFC\_IRRA}\)
Solution de référence#
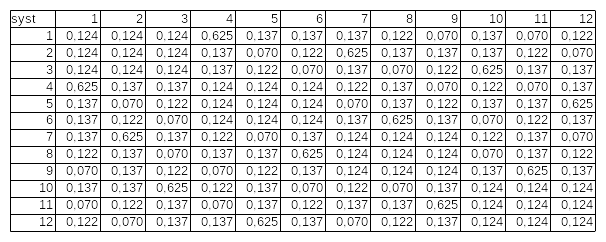
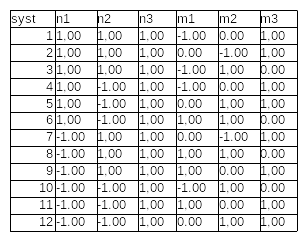
Elle s’appuie sur [bib.1] et [v6.08.110]. Dans le domaine des petites déformations, le tenseur des contraintes \(\sigma\) étant uniaxial, on peut calculer pour chaque système de glissement, la scission résolue par : \({\tau}_{s}=\sigma :{\mu}_{s}\) avec \({\mu}_{s}\) le tenseur d’orientation défini par : \({({m}_{s})}_{ij}=\frac{1}{2}({({n}_{s})}_{i}\cdot {({l}_{s})}_{j}+{({l}_{s})}_{i}\cdot {({n}_{s})}_{j})\) , \({n}_{s}\) désignant la normale au plan de glissement du système \(s\) et \({l}_{s}\) la direction de glissement. L’évolution du glissement plastique est donnée pour chaque système \(s\) par (cf. [R5.03.11]) :
Cas du \(\mathrm{CFC}\) : Pour l’orientation choisie, soit 1-5-9, les facteurs de Schmid initiaux, reliant le tenseur des contraintes aux différentes scissions résolues \({\tau}_{s}\) sont, pour les 12 systèmes octaédriques:
\(\begin{array}{c}[0.45784855,0.22892428,0.22892428,0.15261618,0.26707832,0.11446214,\\ 0.19840104,0.29760156,0.4960026,0.04578486,0.11446214,0.16024699]\end{array}\)
On constate donc que le premier système de glissement activé sera le numéro 9 (\(\mathrm{A3}\) ), et le deuxième sera le numéro 1 (soit \(\mathrm{B4}\) ).
En grandes déformations, ou en prenant en compte la rotation de réseau, on doit voir apparaître pour une déformation non infinitésimale un troisième système de glissement, \(\mathrm{C1}\) (12ème système dans Code_Aster) dont l’activité croît de façon importante, tandis que le glissement visco-plastique du système \(\mathrm{A3}\) n’évolue plus [2].
Références bibliographiques#
N.Rupin Note EDF-R&D : HT24-2010-01128-en «implementation of a new constitutive law based on dislocation dynamics for fcc materials».
Simulation de la réponse mécanique d’un acier inoxydable austénitique à l’aide de calculs cristallins N. Rupin , J.M. Proix , F. Latourte , G. Monnet, communication au 10e Colloque National en Calcul des Structures, 9-13 Mai 2011, Presqu’île de Giens (Var).
Modélisation A#
Caractéristiques de la modélisation#
Le comportement est MONOCRISTAL, en grandes déformations (DEFORMATION=”SIMO_MIEHE”)
Grandeurs testées et résultats#
Valeurs testées#
Petites déformations, comparaison à la modélisation C.
\({\rho}_{9}\) VARI_ELGA / V31) |
0,02 |
9.30093E-08 |
0,001 |
\({\gamma}_{9}\) VARI_ELGA / V32) |
0,02 |
7.0377E-04 |
0,001 |
Grandes déformations, comparaison à la modélisation B
Modélisation B#
Caractéristiques de la modélisation#
Le comportement est MONOCRISTAL, en petites déformations (DEFORMATION=”PETIT”), mais avec rotation de réseau cristallin (ROTA_RESEAU=”CALC” dans DEFI_COMPOR).
Grandeurs testées et résultats#
Valeurs testées#
Petites déformations, comparaison à la modélisation C.
\({\rho}_{9}\) VARI_ELGA / V31) |
0,02 |
9.5373E-08 |
0,001 |
\({\gamma}_{9}\) VARI_ELGA / V32) |
0,02 |
7.6027E-04 |
0,001 |
Grandes déformations, non régression
Variable |
Instants \((s)\) |
Référence |
Tolérance |
\({E}_{zz}\) EPSG_ELGA |
0,2 |
0.22385 |
0,001 |
\({\sigma}_{zz}\) (\(\mathrm{Mpa}\) )SIEF_ELGA |
0,2 |
320.153 |
0,001 |
\({\rho}_{1}\) VARI_ELGA / V7) |
0,2 |
1.731E-05 |
0,001 |
\({\gamma}_{1}\) VARI_ELGA / V8) |
0,2 |
0.31346 |
0,001 |
\({\rho}_{9}\) VARI_ELGA / V31) |
0,2 |
8.37E-07 |
0,001 |
\({\gamma}_{9}\) VARI_ELGA / V32) |
0,2 |
0.010410 |
0,001 |
\({\rho}_{12}\) VARI_ELGA / V40) |
0,2 |
1.719E-05 |
0,001 |
\({\gamma}_{12}\) VARI_ELGA / V41) |
0,2 |
0.11118 |
0,001 |
Modélisation C#
Caractéristiques de la modélisation#
Le comportement est MONOCRISTAL, en petites déformations (DEFORMATION=”PETIT”)
Grandeurs testées et résultats#
Valeurs testées#
Déformation imposée de 0.02, test de non régression.
Variable |
Instants \((s)\) |
Référence |
Tolérance |
\({E}_{zz}\) EPSG_ELGA |
0,02 |
0.02023 |
0,001 |
\({\sigma}_{zz}\) (\(\mathrm{Mpa}\) )SIEF_ELGA |
0,02 |
114.125 |
0,001 |
\({\rho}_{1}\) VARI_ELGA / V7) |
0,02 |
9.8085E-07 |
0,001 |
\({\gamma}_{1}\) VARI_ELGA / V8) |
0,02 |
0.0385 |
0,001 |
\({\rho}_{9}\) VARI_ELGA / V31) |
0,02 |
1.0741E-07 |
0,001 |
\({\gamma}_{9}\) VARI_ELGA / V32) |
0,02 |
1.04944E-03 |
0,001 |
Déformation imposée de 0.2, test de non régression.
Variable |
Instants \((s)\) |
Référence |
Tolérance |
\({E}_{zz}\) EPSG_ELGA |
0,2 |
0.22444 |
0,001 |
\({\sigma}_{zz}\) (\(\mathrm{Mpa}\) )SIEF_ELGA |
0,2 |
230,7133 |
0,001 |
\({\rho}_{1}\) VARI_ELGA / V7) |
0,2 |
1.49E-05 |
0,001 |
\({\gamma}_{1}\) VARI_ELGA / V8) |
0,2 |
0.3567 |
0,001 |
\({\rho}_{9}\) VARI_ELGA / V31) |
0,2 |
6.30676E-06 |
0,001 |
\({\gamma}_{9}\) VARI_ELGA / V32) |
0,2 |
0.05493 |
0,001 |
\({\rho}_{12}\) VARI_ELGA / V40) |
0,2 |
6.45160E-08 \(\text{}={\rho}_{0}\) |
0,001 |
\({\gamma}_{12}\) VARI_ELGA / V41) |
0,2 |
0 |
0,001 |
Cette modélisation comporte également deux calculs supplémentaires :
le premier avec une matrice d’interaction fournie dans une table :
le second utilise de plus 12 systèmes de glissement donnés dans une table
les valeurs fournies pour la matrice d’interaction et les systèmes de glissement sont identiques aux valeurs de matrice d’interaction et des systèmes du comportement choisi (cf. [R5.03.11) On vérifie donc que les résultats sont les mêmes.
Modélisation D#
Caractéristiques de la modélisation#
Le comportement est MONOCRISTAL, l’écoulement visco-plastique est de type MONO_DD_CC, en grandes déformations (DEFORMATION=”SIMO_MIEHE”)
Grandeurs testées et résultats#
Valeurs testées#
Grandes déformations, non régression.
Le système de glissement principal est le numéro 5 (\(\mathit{D1}\) ) et le secondaire est le 8 (\(\mathit{A6}\) )
Variable |
Instants \((s)\) |
Référence (NON_REGRESSION) |
\({E}_{zz}\) EPSG_ELGA |
4000 |
0,48759697170948 |
\({\sigma}_{zz}\) (\(\mathrm{Mpa}\) )SIEF_ELGA |
4000 |
269,5583433288 |
\({\rho}_{5}\) VARI_ELGA / V19) |
4000 |
4,719408788234E+07 |
\({\gamma}_{5}\) VARI_ELGA / V20) |
4000 |
-0,42996601140607 |
\({\rho}_{8}\) VARI_ELGA / V28) |
4000 |
3,847356282155E+07 |
\({\gamma}_{8}\) VARI_ELGA / V29) |
4000 |
0,26136525944739 |
Pour tester l’événement RESI_MAXI, on fixe la valeur à 0,6 et on teste qu’on a bien deux itérations de Newton au premier instant.
Modélisation E#
Caractéristiques de la modélisation#
Le comportement est MONOCRISTAL, en grandes déformations (DEFORMATION=”SIMO_MIEHE”), de façon similaire à la modélisation A, avec un comportement cristallin qui prend en compte l’irradiation
Grandeurs testées et résultats#
Valeurs testées#
Petites déformations, comparaison à la modélisation C.
\({\rho}_{9}\) VARI_ELGA / V31) |
0,02 |
9.30093E-08 |
0,001 |
\({\gamma}_{9}\) VARI_ELGA / V32) |
0,02 |
7.0377E-04 |
0,001 |
Grandes déformations, comparaison à la modélisation B
Les résultats sont identiques à ceux de la modélisation A, ce qui est le résultat attendu : les coefficients permettant de prendre en compte l’effet de l’irradiation dans l’écrouissage sont choisis nuls ici.
Synthèse des résultats#
Les résultats sont satisfaisants et valident les grandes déformations du comportement MONOCRISTAL.