r4.01.01 Pré et Post-traitement pour les coques minces en matériaux composites#
Résumé:
On étend les résultats de la théorie des éléments de plaques exposés dans la documentation [r3.07.03] au cas des matériaux orthotropes multi-couches. La documentation proposée regroupe les aspects thermiques et thermo-élasto-mécaniques. L’utilisation de ces matériaux n’est théoriquement valide que dans le cas d’une symétrie géométrique par rapport au feuillet moyen de la plaque. Il est donc nécessaire que le couplage membrane-flexion soit nul.
Caractéristiques homogénéisées d’une coque mince en thermo-élasticité et en thermique#
Notations - Hypothèses#
La coque est constituée de différentes couches de matériaux orthotropes disposées parallèlement à la surface moyenne \(\Sigma\) (voir Fig. 150).
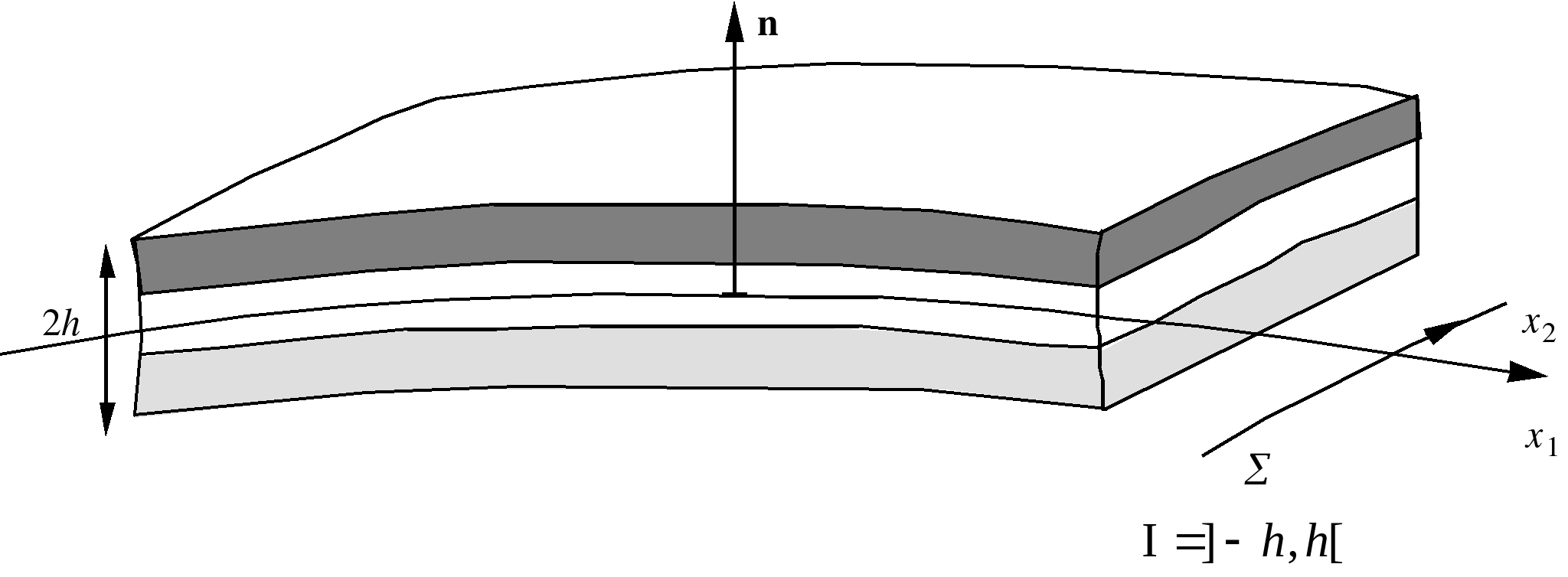
Fig. 150 Coque#
En notant \(({x}_{\gamma})\) les coordonnées \(({x}_{1},{x}_{2})\) sur \(\Sigma\) et \({x}_{3}\) la coordonnée normale à la surface \({x}_{3}\in \left]-h,h\right[\) on peut définir les diverses caractéristiques des matériaux intervenant en thermique et en thermo‑élasticité. On supposera de plus que l” un des axes d’orthotropie coïncide avec la normale \(n\) au point \(({x}_{\gamma})\) à la coque \(\Sigma\) .
Conductivité: \({k}_{\alpha \beta }\left({x}_{\gamma},{x}_{3}\right)\) et \({k}_{33}\left({x}_{\gamma},{x}_{3}\right)\)
Chaleur volumique: \(\mathrm{\rho c}({x}_{\gamma},{x}_{3})\)
Coefficients de dilatation: \({d}_{\text{αβ}}({x}_{\gamma},{x}_{3})\)
Rigidité élastique (contrainte plane): \({\Lambda}_{\text{αβλ}\mu }({x}_{\gamma},{x}_{3})\)
Rigidité de cisaillement: \({\Lambda}_{\mathrm{\alpha 3\lambda 3}}({x}_{\gamma},{x}_{3})\)
Masse volumique: \(\rho ({x}_{\gamma},{x}_{3})\)
Les indices grecs parcourent \(\left\lbrace 1,2\right\rbrace\) . Le système \(\left({x}_{\gamma}\right)\) ne correspond pas nécessairement aux axes d’orthotropie des matériaux dans le plan tangent.
Thermique#
On se place dans le cadre du modèle de coque thermique décrit en [r3.11.01] et [[bib1]]. Un champ de température «coque» est représenté par les trois champs \(({T}^{m},{T}^{s},{T}^{i})\) définis sur \(\Sigma\) de la façon suivante dans l’épaisseur:
Où les \({P}_{j}\) sont les polynômes de Lagrange:
L’interprétation des champs \({T}^{j}\) est alors la suivante. Tout d’abord \({T}^{m}\left({x}_{\gamma}\right)\) qui représente la température sur la surface moyenne de la coque):
Ensuite la température sur la surface supérieure de la coque:
Et la température sur la surface inférieure de la coque:
Grâce à la représentation (), on calcule la forme bilinéaire \({K}_{S}^{T}\) de \(({T}^{m},{T}^{s},{T}^{i})\equiv T\) à partir de la forme du problème 3D (les indices \(ij\) prennent les valeurs \(m,s,i\) ):
Avec la convention habituelle de sommation sur les indices répétés). Où \(\tau\) est un champ virtuel de température et où:
La forme bilinéaire liée à la chaleur volumique dans le problème d’évolution s’écrit:
Thermo-mécanique#
On se place dans le cadre de la modélisation de coque de Love-Kirchhoff (coque mince) ou Reissner-Mindlin (coque épaisse). Dans les deux cas, les sections sont supposées rester planes. Les déformations du plan tangent à \(\Sigma\) s’expriment donc, dans l’épaisseur, à l’aide des tenseurs de déformations \({E}_{\alpha \beta }({x}_{\gamma})\) , de variation de courbure \({K}_{\alpha \beta }({x}_{\gamma})\) et de distorsion \({\gamma}_{\alpha}({x}_{\gamma})\) de la surface [[bib2]]:
Le matériau subissant une déformation locale d’origine thermique donnée par (\({T}^{\text{réf}}\) est la température de référence):
Le champ de contraintes local est donné par la loi thermoélastique en contraintes planes:
Soit avec le modèle précédent pour \(T\) :
Avec:
Les efforts généralisés (flexion \({M}^{\alpha \beta }\) et membrane \({N}^{\alpha \beta }\) ) sont liés à \(\sigma\) par:
Si bien que la loi de comportement de la coque s’écrit au point \({x}_{\gamma}\) :
Où:
Lorsque la température est calculée par le modèle de thermique, on peut exprimer directement les efforts thermiques en fonction des trois composantes \(({T}^{m},{T}^{s},{T}^{i})\) :
Les quantités \(\text{DN}\) et \(\text{DM}\) ne dépendent que des matériaux constitutifs de la coque et de leur répartition.
Remarque :
Lorsque la disposition des matériaux est symétrique par rapport à :math:`Sigma` , certaines intégrales, étant somme de termes impairs, s’annulent : :math:`{Q}^{alpha beta lambda mu }=0` , :math:`{text{DM}}_{1}^{alpha beta }={text{DM}}_{3}^{alpha beta }=0` et :math:`{text{DN}}_{2}^{alpha beta }=0` .
Les efforts tranchants et contraintes de cisaillement transverse sont obtenus par écriture des équations d’équilibre locales sans force volumique:
Ce qui permet d’écrire l’effort tranchant:
Et la contrainte de cisaillement:
En utilisant le fait que \({\sigma}^{\alpha 3}\left({x}_{\gamma ,+h}\right)={\sigma}^{\alpha 3}\left({x}_{\gamma ,-h}\right)=0\) . Le rôle du pré-traitement est de calculer les différentes grandeurs \(A\) , \(B\) , \(C\) , \(P\) , \(Q\) , \(R\) , \(\mathit{DM}\) et \(\mathit{DN}\) , à partir de la description du matériau (nombre, orientation et épaisseur des différentes couches, caractéristiques locales \(\rho \text{c}\) , \(k\) , \(\rho\) , \(L\) et \(d\) ).
Repères dans le plan tangent à la coque. Notation matricielle#
Repères#
On considère le repère global de la structure \((X,Y,Z)\) . Dans le cas des composites stratifiés l’orientation du monocouche est définie par rapport à une direction de référence \({e}_{\text{réf}}\) dans le plan tangent (\(T\) ).
Ce vecteur \({e}_{\text{réf}}\) est déterminé par la projection d’un vecteur \({X}_{1}\) , donné par l’utilisateur sous le mot-clé ANGL_REP de AFFE_CARA_ELEM, sur le plan tangent (\(T\) ) en un point quelconque de la coque.
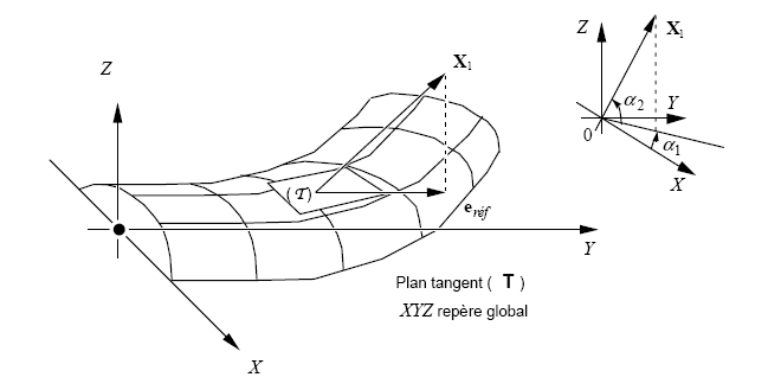
Figure 3.1-1: Définition du repère local
Le vecteur \({X}_{1}\) est défini par l’utilisateur par deux angles orientés:
\({\alpha}_{1}\) : entre \(\mathrm{OX}\) et \({X}_{1\text{proj}(X,Y)}\)
\({\alpha}_{2}\) : entre \({X}_{1\text{proj}(X,Y)}\) et \({X}_{1}\)
\({\alpha}_{1}\) : fait passer de la direction \(\mathrm{0X}\) à la projection dans le plan \(\mathrm{XOY}\) du vecteur \({X}_{1}\) .
\({\alpha}_{2}\) : fait passer de cette projection à \({X}_{1}\) lui-même : voir figure .
Dans les cas où dans une zone donnée de la coque, \(T\) est orthogonal à \({X}_{1}\) , l’utilisateur devra définir un autre vecteur (en pratique pour certaines mailles).
Pour un élément fini de type facette plane, contenu dans le plan tangent \(T\) , on définit le repère orthonormé \(({V}_{1},{V}_{2})\) local à l’élément à l’aide de la numérotation des sommets. Par exemple pour le triangle:
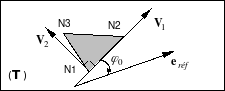
Figure 3.1-b : Repère local de l’élément \(({V}_{1},{V}_{2})\)
L’angle orienté \({j}_{0}=({V}_{1},{e}_{\text{réf}})\) permet de passer du repère local à l’élément au repère de référence.
Notation matricielle#
En thermique comme en thermo-mécanique, la programmation des éléments nécessite d’exprimer les opérateurs d’élasticité et de conduction dans le repère local de l’élément fini \(({V}_{1},{V}_{2})\) . On a l’habitude de simplifier la représentation des grandeurs tensorielles comme suit.
Thermique#
On représente les grandeurs tensorielles dans le repère \(({V}_{1},{V}_{2})\) :
Sous une forme vectorielle avec six vecteurs en tenant compte des symétries (voir r4.01.01-caracteristique-thermique):
Où \(k=\left(\begin{array}{c}{k}_{11}\\ {k}_{22}\\ {k}_{12}\end{array}\right)\) désigne le vecteur conductivité thermique construit à l’aide du tenseur \((\begin{array}{cc}{k}_{\alpha \beta }& \begin{array}{c}0\\ 0\end{array}\\ \begin{array}{cc}0& 0\end{array}& {k}_{33}\end{array})\) (voir r4.01.01-notations-hypotheses), et de \({P}_{i}({x}_{3})\) , les polynômes de Lagrange dans l’épaisseur. On fait de même pour \({B}^{ij}\) et \({C}^{ij}\) .
En se plaçant dans le repère de l’élément \(({V}_{1},{V}_{2})\) , on utilise la matrice de passage \({P}_{k}^{(m)}\) du tenseur de conductivité \(k=(\begin{array}{c}{k}_{11}\\ {k}_{22}\\ {k}_{12}\end{array})\) de \(({V}_{1},{V}_{2})\) vers le repère associé à \({e}_{\text{réf}}\) [[bib3]]:
Il en résulte que la matrice de passage \({({P}_{k}^{m})}^{-1}\) du tenseur de conductivité du repère associé à \({e}_{\text{réf}}\) vers \(({V}_{1},{V}_{2})\) est donnée par:
Thermomécanique#
On représente également sous une forme vectorielle dans le repère \(({V}_{1},{V}_{2})\) :
d’une part, les contraintes normales \({\sigma}_{11},{\sigma}_{22}\) , le cisaillement \({\sigma}_{12}\) dans le plan et le cisaillement transverse \({\sigma}_{13}\) et \({\sigma}_{23}\) :
d’autre part, les déformations correspondantes:
qui se décomposent avec les déformations généralisées de membrane \(E\) et de flexion \(K\) :
Et pour la partie thermique:
Où \(d\) est le vecteur associé aux coefficients de dilatation thermique. Le vecteur contrainte \(\sigma\) s’obtient à l’aide de la matrice de rigidité (3 x 3):
Avec \(R\) , inverse de la matrice de souplesse (voir r4.01.01-thermomecanique). En se plaçant dans le repère de l’élément \(({V}_{1},{V}_{2})\) , on utilise la matrice de passage \({P}^{(m)}\) du tenseur de déformations \(\varepsilon =(\begin{array}{c}{\varepsilon}_{11}\\ {\varepsilon}_{22}\\ {\gamma}_{12}\end{array})\) de \(({V}_{1},{V}_{2})\) vers le repère associé à \({e}_{\text{réf}}\) [[bib3]]:
En se plaçant dans le repère de l’élément \(({V}_{1},{V}_{2})\) , on utilise la matrice de passage \({P}_{2}^{(m)}\) du tenseur de déformations \(\frac{1}{2}\gamma =(\begin{array}{c}{\varepsilon}_{13}\\ {\varepsilon}_{23}\end{array})\) de \(({V}_{1},{V}_{2})\) vers le repère associé à \({e}_{\text{réf}}\) :
De même, en se plaçant dans le repère de l’élément \(({V}_{1},{V}_{2})\) , la matrice de passage \({P}_{s}^{(m)}\) du tenseur de contraintes \(\sigma =(\begin{array}{c}{\sigma}_{11}\\ {\sigma}_{22}\\ {\sigma}_{12}\end{array})\) de \(({V}_{1},{V}_{2})\) vers le repère associé à \({e}_{\text{réf}}\) vaut:
Il en résulte que l’expression de la matrice de passage du repère associé à \({e}_{\text{réf}}\) vers le repère de l’élément \(({V}_{1},{V}_{2})\) pour les contraintes ci-dessus est telle que:
Cette propriété sera particulièrement utile dans la suite de l’exposé.
Coques constituées de couches homogènes#
Description des couches#
On considère la coque constitué d’un empilement de \({N}_{\text{couch}}\) couches (parallèles au plan tangent) dans l’épaisseur \(]-h,h[\) constituées chacune d’un des \({M}_{\text{mater}}\) matériaux homogènes orthotropes (coque stratifiée voir Fig. 151).
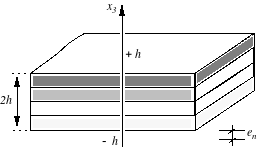
Fig. 151 Coque stratifiée#
Une couche \(n\) est définie par:
son épaisseur \({e}_{n}\) avec les ordonnées des interfaces inférieure et supérieure:
le matériau constitutif \(m\) , et ses caractéristiques physiques,
l’angle \({\phi }_{n}\) de la première direction d’orthotropie (notée \(L\) ) dans le plan tangent (\(T\) ) par rapport à la direction de référence \({e}_{\text{réf}}\) (voir figure).
Remarque :
Dans le cas d’une couche constituée de fibres dans une matrice de résine, la première direction d’orthotropie correspond à la direction des fibres.
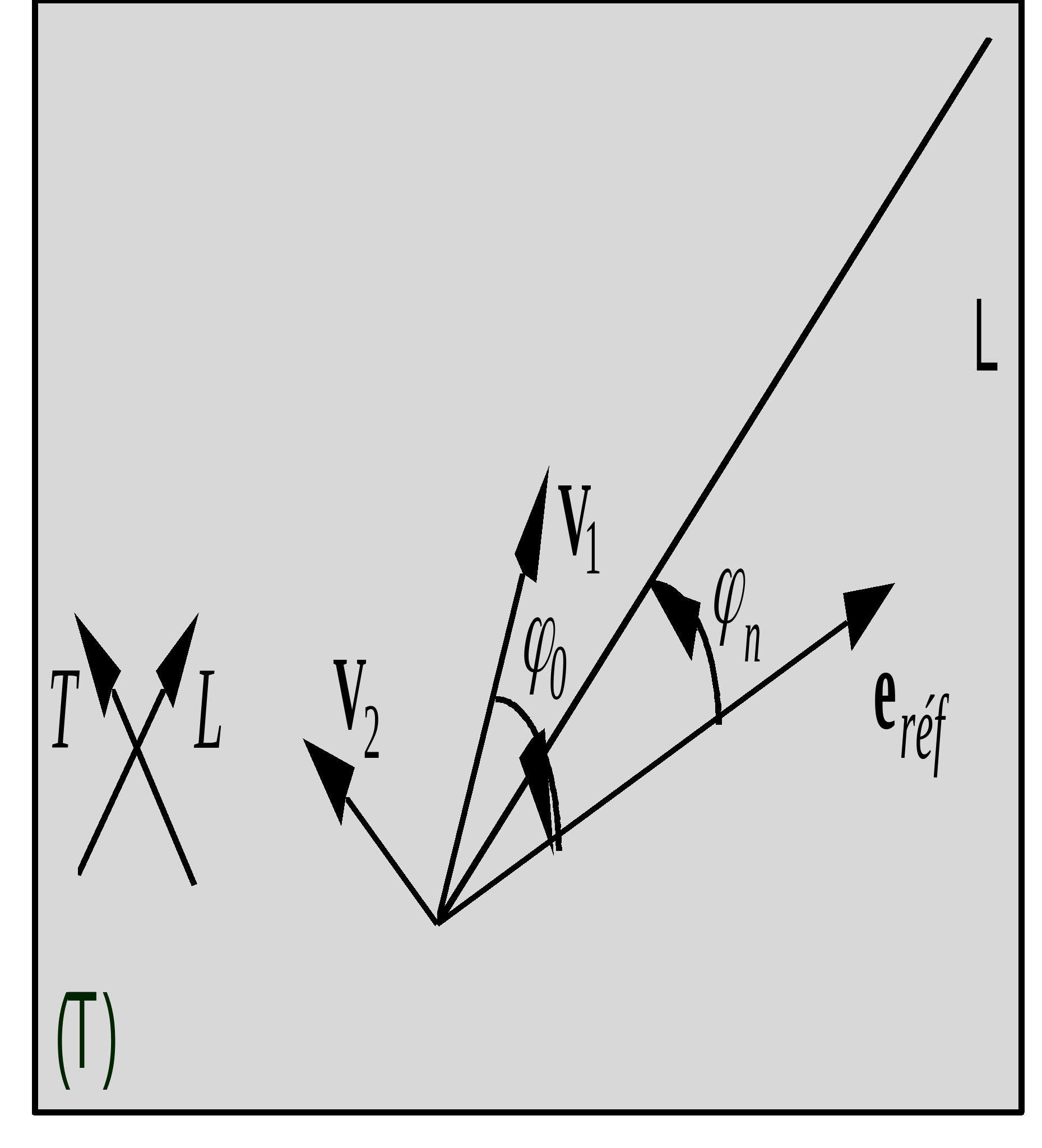
Figure 4.1-1: Définition du repère sur une couche orthotrope
Thermique#
L’expression des vecteurs \({A}^{ij}((i,j)\in {\left\lbrace m,s,i\right\rbrace }^{2},i\le j)\) définis au (voir r4.01.01-thermique) s’obtient à partir des conductivités \({k}_{m}\) du matériau \(m\) constituant les couches \(n\) . Dans les cas d’orthotropie \((L,T)\) du matériau \(m\) , les coefficients de conductivité sont:
Dans le cas d’un matériau isotrope transverse, le coefficient \({k}_{33}\) est égal à \({k}_{T}\) . Pour avoir l’expression de \({A}^{ij}\) dans le repère de l’élément \(({V}_{1},{V}_{2})\) on doit appliquer la rotation suivante, du repère d’orthotropie vers le repère de l’élément, comme explicité au r4.01.01-reperes-plan-tangent:
Les vecteurs \({A}^{ij}\) peuvent alors s’exprimer par intégration dans l’épaisseur des contributions de couche:
Les termes \({B}^{ij}((i,j)\in {\left\lbrace 2,3\right\rbrace }^{2},i\le j)\) sont:
De même pour \({C}^{ij}\) :
Thermomécanique#
Relation de comportement#
Dans le cas des coques stratifiées, on montre que la relation entre les déformations \(\varepsilon\) et la contrainte \(\sigma\) dans la couche \(n\) dépend des constantes du matériau orthotrope \(m\) . Pour les coefficients élastiques, on a \({E}_{\text{LL}}^{(m)}\) , \({E}_{\text{TT}}^{(m)}\) , \({\nu}_{\text{LT}}^{(m)}\) , \({G}_{\text{LT}}^{(m)}\) , \({G}_{\text{LZ}}^{(m)}\) et \({G}_{\text{TZ}}^{(m)}\) et les coefficients de dilatation \({d}_{}^{(m)}\) et \({d}_{\text{TT}}^{(m)}\) . Dans les axes d’orthotropie \((L,T)\) du matériau \(m\) , la matrice de souplesse \(S\) s’exprime par:
La rigidité \({\Lambda}_{(m)}={S}_{(m)}^{-1}\) étant:
La rigidité en cisaillement transverse s’exprime pour sa part de la façon suivante:
En se plaçant dans le repère de l’élément \(({V}_{1},{V}_{2})\) , on utilise la matrice de passage \({P}^{(m)}\) du tenseur de déformations définie au (r4.01.01-reperes-plan-tangent) de \(({V}_{1},{V}_{2})\) vers le repère d’orthotropie:
De même le vecteur dilatation s’exprime dans le repère \(({V}_{1},{V}_{2})\) :
Avec:
Remarque:
Dans le code, on a choisi de réaliser le passage du repère d’orthotropie au repère de l’élément en deux étapes. Une première étape concerne le passage du repère d’orthotropie au repère défini par ANGL_REP. Les données de DEFI_MATERIAU sont ainsi transformées lors de ce premier passage. On traite ensuite le matériau équivalent comme on le ferait avec des éléments de plaques classiques.
Le traitement de la dilatation thermique est fait sous la forme d’une contribution au second membre de l’équation matricielle à résoudre issue du principe du travail virtuel. Cette contribution s’écrit: \({\sigma}^{{\text{th}}_{\left(n\right)}}=-{}^{T}\text{}{P}^{\left(m\right)}.\Lambda {\mid}_{\left(L,T\right)}.\left\lbrace \begin{array}{c}{d}_{\text{LL}}\Delta T\\ {d}_{\text{TT}}\Delta T\\ 0\end{array}\right\rbrace\) .
Cisaillement transverse#
La rigidité en cisaillement transverse de chaque couche s’écrit dans le repère \(({V}_{1},{V}_{2})\) de la même façon que la dilatation:
Avec \({P}_{2}^{(m)}=\left[\begin{array}{cc}C& S\\ -S& C\end{array}\right]\) la matrice de passage vectorielle de \(({V}_{1},{V}_{2})\) vers le repère d’orthotropie. La rigidité en cisaillement transverse globale de la coque \(\left[{R}_{c}\right]\) calculée de manière à être égale à celle donnée par la loi de l’élasticité tridimensionnelle [[bib2]], la matrice \(\left[{R}_{c}\right]\) est définie de sorte que la densité surfacique d’énergie de cisaillement transverse \({U}_{2}\) obtenue pour une distribution tridimensionnelle des contraintes \({\sigma}_{13}\) et \({\sigma}_{23}\) soit identique à celle associée au modèle de plaque de Reissner-Mindlin notée \({U}_{2}\) . Au final:
Et:
Avec \(\langle \tau \rangle =\langle {\sigma}_{13}{\sigma}_{23}\rangle\) . Avec les équations d’équilibre:
Et les conditions:
Les contraintes planes \({\sigma}_{11}\) , \({\sigma}_{22}\) et \({\sigma}_{12}\) s’expriment en fonction des efforts résultants en faisant l’hypothèse de flexion pure et d’absence de couplage membrane/flexion. Il en résulte que:
Où \(P\) est la matrice de rigidité de flexion de l’ensemble du multicouche définie par la première équation de (). Ces calculs, ainsi que les suivants sont à effectuer dans un repère unique. On choisit dans Code_Aster le repère intrinsèque à l’élément. Il faut donc transformer la matrice A dans ce repère. On a alors:
Avec:
Et:
\({U}_{1}\) s’écrit donc:
Avec:
D’où les déplacements finaux:
On propose donc la solution \({H}_{c}={C}_{{11}^{-1}}\) . Les coefficients de correction de cisaillement transverse correspondent au rapport des termes de \({H}_{c}\) à l’intégrale sur l’épaisseur du stratifié des termes de \({\Lambda}_{\tau (m)}\) .
Efforts généralisés#
Les efforts généralisés mis sous une forme vectorielle sont obtenus par intégration dans l’épaisseur de la coque en sommant les contributions des couches (d’épaisseur \({e}_{n}={x}_{3}^{n}-{x}_{3}^{n-1}\) ):
Si on exprime comme précédemment (avec \(m\) matériau de la couche \(n\) ):
On peut noter les efforts généralisés sous la forme:
Avec \(P,Q,R\) des matrices 3 x 3 s’exprimant par:
L’effort tranchant \(V\) est obtenu par dérivation du moment (voir r4.01.01-cisaillement-transverse). Les efforts généralisés d’origine thermique sont calculés directement:
Localisation des contraintes (post-traitement)#
Inversement, à la suite d’un calcul par élément finis et de l’obtention des déformations \(E\) et variations de courbure \(K\) , on peut alors calculer le champ de contraintes \({\sigma}_{(n)}(n=1,{N}_{\text{couch}})\) dans chaque couche de l’élément.
Il est nécessaire de calculer dans chaque couche \((n)\) , la matrice \({\Lambda}_{(m)}\) et les termes \((T({x}_{3})-{T}^{\text{réf}}).{d}_{(m)}\) (voir r4.01.01-notation-matricielle) (\(m={\text{mat}}_{n}\) représente les caractéristiques matériau de la couche \(n\) ).
Les contraintes \({\sigma}_{\alpha \beta }\) à une ordonnée \({x}_{3}\in ]{x}_{3}^{n-1},{x}_{3}^{n}[\) dans la couche (\(n\) ) sont alors:
Et le cisaillement transverse:
Remarque:
Dans le code les post-traitements des éléments de plaques sont généralement définis dans le repère associé à ANGL_REP. Les contraintes dans le repère intrinsèque de l’élément sont ainsi ramenées dans le repère de la variété. On a:
\({\left(\begin{array}{c}{\sigma}_{11}\\ {\sigma}_{22}\\ {\sigma}_{12}\end{array}\right)}_{\text{eref}}=\left(\begin{array}{ccc}{C}^{2}& {S}^{2}& +2\text{CS}\\ {S}^{2}& {C}^{2}& -2\text{CS}\\ -\text{CS}& +\text{CS}& {C}^{2}-{S}^{2}\end{array}\right){\left(\begin{array}{c}{\sigma}_{11}\\ {\sigma}_{22}\\ {\sigma}_{12}\end{array}\right)}_{n}\) |
où \(\begin{array}{c}C=\cos({\varphi}_{0})\\ S=\sin({\varphi}_{0})\end{array}\) (voir où \({\varphi}_{0}\) est l’angle entre \({V}_{1}\) et \({e}_{\text{réf}}\) |
du mo
Calcul des critères de rupture dans les couches (post-traitement)#
Les valeurs limites de contraintes de rupture dépendent du matériau de la couche, de la direction et du sens de la sollicitation (pour un groupe d’éléments correspondant au même champ matériau):
\(\begin{array}{}\begin{array}{ccc}\begin{array}{c}{\text{mat}}_{n}\end{array}& \begin{array}{c}X\text{: limite en traction dans le sens L}\\ {X}^{'}\text{: limite en compression dans le sens L}\\ Y\text{: limite en traction dans le sens T}\\ {Y}^{'}\text{: limite en compression dans le sens T}\\ S\text{: limite en cisaillement dans le sens LT}\end{array}& \begin{array}{c}(\text{1ère direction orthotropie : sens des fibres})\\ (\text{1ère direction orthotropie : sens des fibres})\\ (\text{2ème direction orthogonale à la 1 ère})\\ (\text{2ème direction orthogonale à la 1 ère})\\ \end{array}\end{array}\\ \end{array}\)
Il est nécessaire de calculer les contraintes dans le repère de la couche (définie par les axes d’orthotropie) à partir des contraintes dans le repère de l’élément. L’angle entre \({V}_{1}\) et \({e}_{\text{réf}}\) est \({\varphi}_{0}\) , et celui entre \({e}_{\text{réf}}\) et le repère d’orthotropie est \({\varphi}_{n}\) :
Pour le critère de contrainte maximum, les cinq critères suivants sont calculés par couche:
Le critère de Tsai-Hill s’écrit dans chaque couche de la manière suivante:
Le matériau est rompu lorsque \({C}_{\text{TH}}\ge 1\) . Les valeurs \(X\) et \(Y\) sont remplacées par \({X}^{'}\) et \({Y}^{'}\) lorsque les contraintes \(({\sigma}_{L(n)},{\sigma}_{T(n)})\) correspondantes sont négatives.
Bibliographie#
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
6.3 |
P. MASSIN, F. NAGOT, F. VOLDOIRE EDF-R&D/AMA |
Texte initial |
7.4 |
|