r5.05.04 Modélisation de l’amortissement en dynamique linéaire#
Résumé :
Les analyses dynamiques linéaires des structures soumises à des forces ou des mouvements imposés nécessitent d’ajouter des caractéristiques d’amortissement mécanique aux caractéristiques de rigidité et de masse du modèle.
On dispose de plusieurs modélisations classiques, applicables à tous les types d’éléments finis disponibles :
le modèle d’amortissement visqueux,
le modèle d’amortissement hystérétique (dit aussi « amortissement structural »)
pour l’analyse harmonique des matériaux viscoélastiques.
Pour les analyses utilisant les méthodes de réponse dynamique par recombinaison modale, avec une base modale de modes propres réels, il est possible d’introduire des coefficients d’amortissement modaux.
Modèle d’amortissement visqueux#
Définition physique de l’amortissement visqueux#
Les dispositifs amortisseurs classiques (par exemple, par laminage d’un fluide visqueux à travers les orifices d’un piston entraîné par le mouvement vibratoire) délivrent des forces proportionnelles à la vitesse du mouvement et de signe opposé. Au cours d’un cycle, le travail de ces forces est positif : c’est l’amortissement visqueux.

Pour un oscillateur simple de rigidité \(k\) , de masse \(m\) et d’amortissement visqueux \(c\) , la force extérieure appliquée équilibre les trois composantes : la force de rappel élastique \(\mathit{ku}\) , la force d’amortissement \(c\dot{u}\) et la force d’inertie \(m\ddot{u}\) d’où l’équation dynamique en mouvement absolu:
Pour ce modèle d’amortissement visqueux l’énergie dissipée au cours d’un cycle de pulsation \(\omega\) est proportionnelle à la vitesse vibratoire \(-\omega {u}_{0}\sin(\omegat )\) associée au déplacement \({u}_{0}\cos(\omegat )\) :
et l’énergie potentielle pour un déplacement sinusoïdal \({u}_{0}\cos\omega t\) est:
Pour un cycle de pulsation \(\omega\) et de déplacement sinusoïdal \({u}_{0}\cos\omega t\) , le coefficient de perte est proportionnel à la fréquence du mouvement:
Oscillateur harmonique avec amortissement visqueux#
L’analyse classique du modèle non amorti associé à l’équation (), mise sous la forme \(\left(k-m{\omega}^{2}\right)u=0\) nous donne \({\omega}_{0}=\sqrt{\frac{k}{m}}\) la pulsation propre. L’amortissement critique à partir duquel l’équation différentielle () n’a plus de solution oscillante est donné par les formules \({c}_{\text{critique}}=2\sqrt{\text{km}}=2m{\omega}_{0}=\frac{2k}{{\omega}_{0}}\) ce qui permet de donner une interprétation numérique de l’amortissement réduit, qui est souvent exprimé en pourcentage de l’amortissement critique :
Réponse à un lâcher d’excitation#
À partir d’une déformation statique \({u}_{\text{st}}=\frac{{f}_{0}}{k}\) , un lâcher (libération du système) produit un mouvement oscillatoire libre \({u}_{l}(t)={u}_{0}{e}^{-\xi {\omega}_{0}t}\cos{\omega}_{0}^{'}t\) qui fait apparaître la pulsation propre du système amorti \(\omega {'}_{0}={\omega}_{0}\sqrt{(1-{\xi}^{2})}\) .
Au cours du temps, l’amplitude extrémale \(({u}_{1},{u}_{2})\) diminue à chaque période de \({e}^{-\xi {\omega}_{0}T}={e}^{-2\pi \xi }={e}^{-\delta }\) où \(\delta\) est le décrément logarithmique tel que \(\delta =2\pi \xi\) .
Réponse à une excitation harmonique#
La réponse à une excitation harmonique de la forme \(f(t)={f}_{0}{e}^{j\omega t}\) s’écrit avec une réponse forcée solution particulière permanente \(u(t)={u}_{0}{e}^{\left(j\omega t-\phi \right)}\) qui s’écrit avec la pulsation réduite \(\lambda =\frac{\omega}{{\omega}_{0}}\) \(\frac{{\mathit{ku}}_{0}}{{f}_{0}}=\frac{1}{1-{\lambda}^{2}+j2\xi \lambda }={H}_{v}\left(j\omega \right)\) où \({H}_{v}(j\omega )\) est la fonction de transfert complexe d’un oscillateur simple avec amortissement visqueux.
Le module de la réponse \(\frac{{u}_{0}}{{u}_{\text{st}}}=\frac{{\mathit{ku}}_{0}}{{f}_{0}}=|{H}_{v}\left(j\omega \right)|=\frac{1}{\sqrt{{\left(1-{\lambda}^{2}\right)}^{2}+{\left(2\xi \lambda \right)}^{2}}}\) fait apparaître une amplification dynamique par rapport à la réponse statique \({u}_{\text{st}}\) .
Cette amplification est maximale pour \(\lambda =\frac{{\omega}_{0}^{'}}{{\omega}_{0}}=\sqrt{\left(1-{\xi}^{2}\right)}\) et donne la valeur du déplacement maximal \(\frac{{u}_{0\max}}{{u}_{\text{st}}}=\frac{1}{2\xi \sqrt{\left(1-{\xi}^{2}\right)}}\) . Si l’on observe la vitesse vibratoire \(\dot{u}(t)=j\omega u(t)\) , l’amplification de la vitesse vibratoire est maximale pour \(\lambda =\frac{{\omega}_{0}}{{\omega}_{0}}=1\) et l’amplitude maximale de la vitesse est \({\dot{u}}_{0\max}=\frac{1}{2\xi }=Q\) , où \(Q\) est l’analogie mécanique du facteur de surtension des électriciens. Ces propriétés sont à l’origine des méthodes de mesure des caractéristiques d’amortissement des structures mécaniques.
Modèle d’amortissement hystérétique#
Définition physique de l’amortissement hystérétique#
Pour une excitation sinusoïdale appliquée à une structure élasto-plastique ou à une structure élastique avec frottement, la courbe force-déplacement fait apparaître un travail positif de la force extérieure qui correspond à une énergie dissipée dans la structure, que l’on peut en première approximation représenter comme ci-dessous:

Dans les deux cas le coefficient de perte croit, en général avec l’amplitude du cycle. Pour des valeurs faibles du coefficient de perte (inférieur à \(0,2\) ), la forme du cycle n’a pas d’influence sensible sur le mouvement et on peut l’assimiler à une ellipse [bib1].
Dans le cas particulier d’une relation force-déplacement dont le cycle est de forme elliptique, l’expression du coefficient de perte est simple. Pour une force appliquée \(F\) et un déplacement \(u={u}_{0}\cosq\) la force de rappel est \({\mathit{ku}}_{0}\cos\theta\) , \(k\) étant la raideur «classique» du système mécanique, et la force d’amortissement \(-{\mathit{hu}}_{0}\sin\theta\) , \(h\) étant la raideur déphasée de \(90°\) , ce qui conduit à la relation de comportement \(F={\mathit{ku}}_{0}\cos\theta -{\mathit{hu}}_{0}\sin\theta\) .

Les énergies, dissipées au cours d’un cycle et potentielle maximum, sont:
et:
d’où le coefficient de perte:
Pour un cycle sinusoïdal \(\theta =\omegat\) , Le coefficient d’amortissement hystérétique \(\eta =\frac{h}{k}\) est indépendant de \(\omega\) . Il peut être déterminé à partir d’un essai sous chargement cyclique harmonique.
Oscillateur harmonique avec amortissement hystérétique#
Le modèle d’amortissement hystérétique est utilisable pour traiter les réponses harmoniques de structures avec des matériaux viscoélastiques.
L’énergie dissipée par cycle sous la forme \({E}_{d}^{\text{cycle}}={\int}_{0}^{2\pi }\sigma d\epsilon\) permet de mettre en évidence un module de Young complexe \({E}^{\text{*}}\) à partir de la relation contrainte-déformation d’un matériau viscoélastique \(\sigma ={\sigma}_{0}{e}^{j\omega t}\) et \(\epsilon ={\epsilon}_{0}{e}^{j\left(\omega t-\phi \right)}\) où \({\sigma}_{0}\) et \({\epsilon}_{0}\) sont les amplitudes et \(\varphi\) la phase:
En notant \({E}_{1}=\left(\frac{{\sigma}_{0}}{{\epsilon}_{0}}\right)\cos\phi\) la partie réelle et \({E}_{2}=\left(\frac{{\sigma}_{0}}{{\epsilon}_{0}}\right)\sin\mathrm{\phi }\) la partie imaginaire on obtient :
avec \(\eta =\frac{{E}_{1}}{{E}_{2}}=\text{tg}\phi\) où \(\phi\) est aussi appelé angle de perte.
L’analyse classique de l’équation () n’a de sens, avec un modèle d’amortissement hystérétique, que pour une excitation harmonique \(f(t)={f}_{0}{e}^{j\omegat }\) qui conduit à l’équation:
où la partie réelle du déplacement \(u\) représente le déplacement de la masse et \(h=k\eta\) .
Comme précédemment [§ 2.2 ], la réponse harmonique peut s’écrire, avec la pulsation réduite \(\lambda =\frac{\omega}{{\omega}_{0}}\) , sous la forme suivante:
où \({H}_{h}(j\omega )\) est la fonction de transfert complexe d’un oscillateur simple avec amortissement hystérétique.
Le module de la réponse \(\frac{{u}_{0}}{{u}_{\text{st}}}=\frac{{\mathit{ku}}_{0}}{{f}_{0}}=|{H}_{h}\left(j\omega \right)|=\frac{1}{\sqrt{{\left(1-{\lambda}^{2}\right)}^{2}+{\eta}^{2}}}\) fait apparaître une amplification dynamique par rapport à la réponse statique, amplification qui est maximale pour \(\lambda =1\) et donne la valeur du déplacement maximal \(\frac{{u}_{0\max}}{{u}_{\text{st}}}=\frac{1}{\eta}=\frac{1}{2\xi }\) .
En conclusion, l’amortissement réduit associé à l’amortissement hystérétique est:
Point sur la viscoélasticité linéaire#
Les matériaux viscoélastiques linéaires ont des lois de comportement du type:
où \(M\) et \(L\) sont des opérateurs différentiels linéaires de la variable temps, c’est à dire du type \(L=\sum{l}_{k}{\partial}_{t}^{{\alpha}_{k}}\) où \({l}_{k}\) sont des tenseurs réels et \({\alpha}_{k}\) sont les ordres de dérivation potentiellement non-entiers.
Pour calculer le mouvement à un instant \(t\) donné, il faut connaître la dynamique des instants précédents: en ce sens, le mouvement à l’instant \(t\) dépend de son histoire. Si les modèles à dérivées temporelles entières nécessitent la connaissance de la vitesse, de l’accélération ou d’ordres plus élevés du mouvement pour calculer les efforts à un instant donné, les modèles d’ordre fractionnaires eux, ont besoin de toute l’histoire du mouvement. En effet, les dérivées fractionnaires ont la caractéristique d’être non-locales: par exemple la dérivée de Grunwald-Letnikov de \(f\) en \(x\) d’ordre \(\alpha\) se définie comme la limite quand \(h\to 0\) de la différence finie:
ainsi chaque point \(y<x\) entre en compte pour le calcul de cette dérivée.
Le calcul en temporel d’un matériau viscoélastique, bien que conceptuellement simple, est compliqué à mettre en œuvre sur des cas d’applications industrielles, l’évaluation de la loi de comportement nécessite d’être capable d’accéder rapidement et à un grand nombred’instants de calculs ultérieurs.
Le calcul harmonique est quand à lui très simple à mener, en effet la loi de comportement \(L\sigma =M\epsilon\) devient:
où \({H}_{c}(\omega )\) est un tenseur de Hooke aux valeurs complexes et dépendantes de la fréquence. Deux familles de modèles rhéologiques s’affrontent pour la modélisation des modules d’élasticités du tenseur de Hooke:
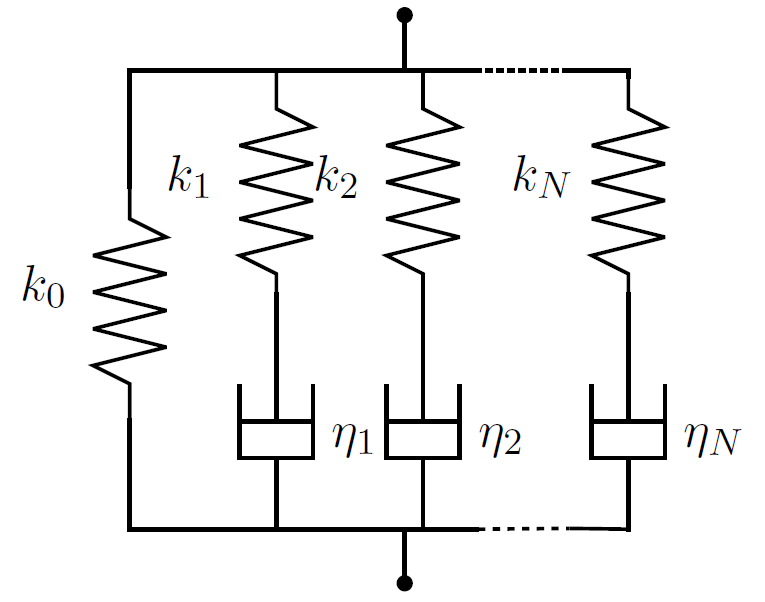
Les modèles composés: les polymères formant le matériau viscoélastique sont modélisés comme une mise en série ou en parallèle d’un motif élémentaire composé d’amortisseurs et de pistons.
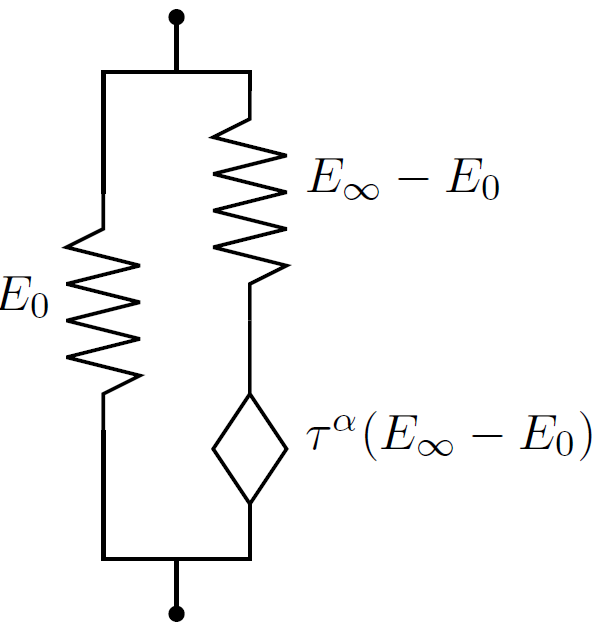
Les modèles de type fractionnaire: les chaînes de polymères sont modélisés d’un bloc par un motif élémentaire comprenant des ressorts, pistons et «pistors» d’ordre alpha (un pistor est un élément qui a associe une déformation \(u\) associe \({\partial}_{t}^{\alpha}u\) )
Exemples de modèles:
Modèle |
Chaînede Maxwell |
Zener Fractionnaire |
Variation avec \(\omega\) des modules |
\({E}^{\text{*}}(\omega )=\sum_{k=1}^{N}{E}_{k}\frac{j{\omega}_{k}{\eta}_{k}}{{E}_{k}+j{\omega}_{k}{\eta}_{k}}\) |
\({E}^{\text{*}}(\omega )=\frac{{E}_{0}+{E}_{\infty}{(j\omega \tau )}^{\alpha}}{1+{(j\omega \tau )}^{\alpha}}\) |
Schéma |
|
|
Les modèles composés ont besoin de manière générale d’un nombre de termes \(N\) supérieur à \(15\) , le nombre de coefficients à déterminer par des essais peut être important.Alors qu’un modèle de Zener fractionnaire n’a besoin que de quatre nombres pour recoller aux courbes expérimentales.
Un matériau viscoélastique est donc un matériau qui dans le domaine fréquentiel suit une loi de Hooke dont les modules d’élasticité sont complexes et dépendant de la fréquence. Les coefficients du modèle de chaque module d’élasticité (\(E\) , \(G\) , \(\nu\) , \(K\) , …) sont mesurés par des essais spécifiques à différentes fréquences.
Par exemple, un matériau viscoélastique isotrope modélisé par une loi de Zener fractionnaire a pour loi de comportement:
Ce matériau doit donc être caractérisé en fréquence en déterminant les deux quadruplets \(({G}_{0,}{G}_{\infty},{\alpha}_{G},{\tau}_{G})\) et \(({K}_{0,}{K}_{\infty},{\alpha}_{K},{\tau}_{K})\) .
Autres modèles d’amortissement#
On ne traite pas ici des modèles représentant l’amortissement « ajouté » par les fluides immobiles confinés ou les fluides en mouvement. On se reportera aux documents [R4.07.02-R4.07.04], traitant du couplage fluide‑structure.
Analyse de structure avec amortissement#
Les modélisations présentées ne sont pas aisément généralisables aux différentes analyses de structure.
**Remarque:Les deux modélisations n’ont pas le même domaine d’analyse linéaire. L’amortissement visqueux est utilisable en analyse transitoire ou harmoniqueet* l’amortissement hystérétique n’est utilisable qu’en analyse harmonique.
Les options de modélisation permettent la définition d’un amortissement global pour la structure et d’amortissements localisés sur des mailles ou des groupes de mailles.
Amortissement global de la structure#
En l’absence d’informations suffisantes sur les composants et liaisons créant une dissipation d’énergie, une modélisation courante consiste à construire une matrice d’amortissement globale.
Amortissement visqueux proportionnel global (Rayleigh)#
On se place dans le cadre des équations classiques de la dynamique des structures linéaires :
La notion d’amortissement de Rayleigh permet de définir la matrice d’amortissement \(C\) comme combinaison linéaire des matrices de rigidité et de masse :
Avantages :
facile à mettre en œuvre en utilisant les opérateurs DEFI_MATERIAU [U4.43.01] et ASSEMBLAGE(OPTION=”AMOR_MECA”). On peut aussi utiliser l’opérateur COMB_MATR_ASSE [U4.53.01], après avoir assemblé les matrices de rigidité et de masse à coefficients réels;
utile pour la validation d’algorithmes de résolution;
historiquement, son succès est attaché aux méthodes d’analyse transitoire par recombinaison modale à partir d’une base de modes propres réels. Les propriétés d’orthogonalité des modes propres réels solutions du problème aux valeurs propres \(\left(K-{\omega}^{2}M\right)\phi =0\) se traduisent par la diagonalisation simultanée dans le passage en coordonnées modales généralisées de \({\phi }^{T}K\phi\) et \({\phi }^{T}M\phi\) . L’amortissement de Rayleigh est une condition suffisante pour diagonaliser \({\phi }^{T}C\phi\) . Le système d’équations modales \(\ddot{q}+\frac{{\phi }^{T}C\phi }{{\phi }^{T}M\phi }\dot{q}+{\omega}^{2}q=\frac{{\phi }^{T}}{{\phi }^{T}M\phi }F(t)\) devient alors diagonal:
Inconvénients:
Cette modélisation ne permet pas de représenter l’hétérogénéité de la structure par rapport à l’amortissement.
L’amortissement effectivement introduit dans le modèle dépend fortement de l’identification des coefficients \(\alpha\) et \(\beta\) Cf. [§ 5.1.2 ].
Influence des coefficients d’amortissement proportionnel#
Trois cas d’identification simples sont présentés ici pour illustrer, les effets induits par cette modélisation:
amortissement proportionnel aux caractéristiques d’inertie: \(\alpha =0\) et \(\beta\)
Ce cas a été très utilisé en résolution transitoire directe: si la matrice de masse est diagonale, celle d’amortissement l’est encore et le gain en place mémoire est évident. Le coefficient \(\beta\) peut être identifié à l’amortissement réduit expérimental \({\xi}_{1}\) du mode propre \(\left({\phi }_{1},{\omega}_{1}\right)\) qui participe le plus à la réponse d’où \(\beta =2{\xi}_{1}{\omega}_{1}\) . Pour toute autre pulsation on obtient un amortissement modal réduit \(\xi =\beta \frac{{\omega}_{1}}{\omega}\) . Les modes élevés \(\omega \text{>>}{\omega}_{i}\) seront très peu amortis et les modes basse fréquence \(\omega <{\omega}_{1}\) trop amortis.

amortissement proportionnel aux caractéristiques de rigidité: \(\alpha ` et :math:\)beta =0`
Le coefficient \(\alpha\) peut être identifié, comme précédemment à partir de \({\xi}_{2}\) associé au mode \(\left({\mathrm{\phi }}_{2},{\omega}_{2}\right)\) d’où \(\alpha =2{\xi}_{2}{\omega}_{2}\) . Pour toute autre pulsation on obtient un amortissement modal réduit \(\xi =\alpha \frac{\omega}{{\omega}_{2}}\) . Les modes élevés \(\omega \text{>>}{\omega}_{2}\) sont très amortis.

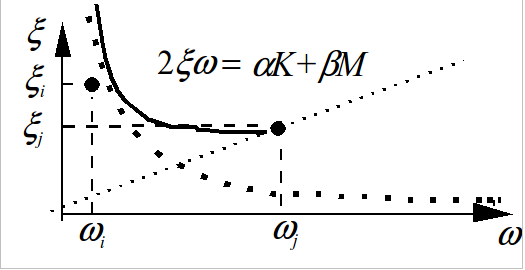
amortissement proportionnel complet: \(\alpha ` et :math:\)beta`
A partir d’une identification sur deux modes indépendants \(({\varphi}_{1},{\omega}_{1})\) et \(({\varphi}_{2},{\omega}_{2})\) , on obtient pour toute autre pulsation un amortissement modal réduit \(\xi =\frac{1}{2}\left(\alpha \omega +\frac{\beta}{\omega}\right)={\xi}_{1}\frac{\omega}{{\omega}_{1}}+{\xi}_{2}\frac{{\omega}_{2}}{\omega}\) .
Dans l’intervalle \(\left[{\omega}_{1},{\omega}_{2}\right]\) , la variation de l’amortissement réduit est faible et en dehors on retrouve l’addition des inconvénients précédents : les modes extérieurs à l’intervalle sont trop amortis.
Dans aucun des cas précédents, on ne pourra reproduire une hypothèse d’amortissement modal égal pour tous les modes. Des méthodes ont été imaginées pour tendre vers cet objectif [bib1].
Amortissement hystérétique global#
La généralisation de l’équation de l’oscillateur simple avec amortissement hystérétique conduit au système d’équations complexes où \(F\left(\Omega \right)\) est une excitation harmonique.
Connaissant la matrice de rigidité réelle, il est possible de construire une matrice d’amortissement hystérétique \({K}_{h}=j\eta K\) , avec un coefficient de perte globale \(\eta\) .
Comme précédemment en résolution par recombinaison modale, à partir d’une base de modes propres réels, on obtient \({\phi }^{T}M\phi \ddot{q}+j{\phi }^{T}{K}_{h}\phi q+{\phi }^{T}K\phi q={\phi }^{T}F(t)\) où la matrice d’amortissement hystérétique généralisée est diagonale \({\phi }^{T}{K}_{h}\phi =\left[\text{diag}\eta {\gamma}_{i}\right]\) , comme la matrice de rigidité généralisée \({\phi }^{T}K\phi =\left[\text{diag}{\gamma}_{i}\right]\) .
D’après la définition de l’amortissement réduit, l’amortissement modal est constant pour tous les modes d’où \(\xi =\frac{\eta}{2}\) .
Avantages:
facile à mettre en œuvre en utilisant les opérateurs DEFI_MATERIAU [U4.43.01] et ASSEMBLAGE(OPTION=”RIGI_MECA_HYST”) [U4.61.21]. On peut aussi procéder en utilisant l’opérateur COMB_MATR_ASSE [U4.53.01], après avoir assemblé la matrice de rigidité;
très utile pour la validation d’algorithmes de résolution;
l’amortissement effectivement introduit dans le modèle est constant pour tous les modes de la structure, comme le demande des règlements de construction.
Inconvénients:
cette modélisation est mal adaptée pour les études industrielles, car elle ne permet pas de représenter l’hétérogénéité de la structure par rapport à l’amortissement;
seule l’analyse harmonique (en complexe) est possible.
Amortissement hystérétique viscoélastique#
La structure est amortie par un matériau viscoélastique, le calcul en harmonique vise alors à résoudre l’équation:
La détermination des modes complexes n’est pour l’instant possible que par utilisation de DYNA_VISCO [U4.53.04] qui permet de calculer les modes en air d’un matériau viscoélastique isotrope dont le coefficient de Poisson est réel.
Avantages:
facile à mettre en œuvre en utilisant les opérateurs DEFI_MATERIAU [U4.43.01] et ASSEMBLAGE(OPTION=”RIGI_MECA_HYST”) [U4.61.21];
l’amortissement est physique.
Inconvénients:
seule l’analyse harmonique (en complexe) est possible.
Amortissement localisé#
Pour les analyses nécessitant une modélisation représentant l’hétérogénéité de la structure, il est possible d’affecter des caractéristiques d’amortissement localisées sur les mailles de la structure, en fait sur des éléments du modèle.
Éléments amortisseurs#
Il est possible d’appliquer des éléments amortisseurs discrets :
sur des mailles POI1 : l’amortissement est lié au déplacement (respectivement la vitesse) du nœud support,
sur des mailles SEG2 : l’amortissement est lié au déplacement relatif (respectivement la vitesse relative) des deux nœuds reliés.
L’opérateur AFFE_CARA_ELEM [U4.24.01] permet de définir pour chaque élément discret:
une matrice d’amortissement de type visqueux \({a}_{\text{discret}}\) dont les termes sont affectés aux différents degrés de liberté des nœuds concernés; plusieurs modes de description de la matrice sont disponibles.
un coefficient de perte hystérétique \({\eta}_{\text{discret}}\) multiplicateur de la matrice de rigidité de l’élément discret affecté à la maille support.
Amortissement affecté à tout type d’élément fini#
Le matériau élastique affecté à tout élément fini peut être défini avec des paramètres d’amortissement par l’opérateur DEFI_MATERIAU [U4.23.01].
Amortissement visqueux proportionnel avec deux paramètres de Rayleigh \(\alpha\) et \(\beta\) .
AMOR_ALPHA = \(\alpha\) AMOR_BETA = \(\beta\)
Pour tous les types d’éléments finis (de milieux continus, structuraux ou discrets), il est possible de calculer les matrices élémentaires réelles correspondant à l’option de calcul “AMOR_MECA”, après avoir calculé les matrices élémentaires correspondant aux options de calcul “RIGI_MECA” et “MASS_MECA”.
La matrice élémentaire de l’élément \(i\) affecté du matériau \({\alpha}_{j},{\beta}_{j}\) est alors de la forme:
pour un élément fini:
pour un élément discret:
Amortissement hystérétique avec un coefficient de \(\eta\)
AMOR_HYST = coef
Pour tous les types d’éléments finis (de milieux continus, structuraux ou discrets), il est possible de calculer les matrices élémentaires complexes correspondant à l’option de calcul “RIGI_MECA_HYST”, après avoir calculé les matrices élémentaires correspondant aux options de calcul “RIGI_MECA”.
La matrice élémentaire de l’élément \(i\) affectée du matériau \({\alpha}_{j},{\beta}_{j}\) est alors de la forme:
pour un élément fini:
pour un élément discret:
Construction de la matrice d’amortissement#
L’assemblage des matrices élémentaires d’amortissement est obtenu avec l’opérateur ASSE_MATRICE habituel [U4.42.02] ou par la commande ASSEMBLAGE [U4.31.02]. On doit utiliser les mêmes numérotations et le même mode de stockage que pour les matrices de rigidité et de masse (opérateur NUME_DDL [U4.42.01]).
Remarque : l amatrice d’amortissement obtenue est non proportionnelle \(C\ne \alpha K+\beta M\) ou \({K}_{h}\ne j\eta K\) .
Utilisation de la matrice d’amortissement#
Utilisation de la matrice d’amortissement visqueux#
Analyse dynamique linéaire directe#
La matrice d’amortissement visqueux \(C\) , quel que soit son mode d’élaboration et son caractère proportionnel ou non proportionnel, est utilisable pour l’analyse dynamique linéaire directe (mot clé MATR_AMOR) avec l’opérateur DYNA_VIBRA.
Analyse dynamique par recombinaison modale#
Pour les analyses par recombinaison modale, on doit projeter cette matrice dans le sous-espace défini par un ensemble \(\phi\) de modes propres réels, obtenus sur le problème non amorti associé \((K-{\omega}^{2}M)\phi =0\) .
Cette opération est possible avec la commande PROJ_BASE [U4.55.11] ou avec l’opérateur PROJ_MATR_BASE [U4.55.01].
Pour le calcul de la réponse dynamique en force ou en mouvement imposé dans l’espace modal, on dispose de possibilités suivantes :
utilisation de la matrice d’amortissement généralisée \({\phi }^{T}C\phi\) :
en analyse transitoire avec l’opérateur DYNA_VIBRA [R5.06.04] et [U4.54.03] et le mot clé AMOR_GENE,
en analyse sismique par méthode spectrale avec l’opérateur COMB_SISM_MODAL [R4.05.03] et [U4.54.04] et le mot clé AMOR_GENE,
en analyse harmonique avec l’opérateur DYNA_VIBRA [R5.05.03] et [U4.54.03] et le mot clé MATR_AMOR.
Rappelons que dans le cas de l’amortissement hétérogène (utilisation des options d’amortissement localisé), la matrice \({\phi }^{T}C\phi\) n’est pas diagonale.
utilisation de l’amortissement modal visqueux en fournissant un amortissement modal réduit constant pour tous les modes \(\xi\) ou une liste de valeurs \({\xi}_{i}\) .
Plusieurs méthodes d’identification de ces coefficients sont possibles mais il n’existe pas de commande de construction systématique de la liste de valeurs. On peut néanmoins citer l’utilisation de l’hypothèse de Basile \((2{\xi}_{i}{\omega}_{i}=\text{diag}\frac{{\phi }^{T}C\phi }{{\phi }^{T}M\phi })\) , l’usage règlement RCC-G (ou ETC-C) pour l’analyse sismique avec amortissement du sol, exploitation de résultats expérimentaux, …
Pour les analyses par sous-structuration dynamique, avec l’utilisation d’une base modale (base de Ritz) on se reportera à [R4.06.03] et [R4.06.04].
Utilisation de la matrice de rigidité complexe#
La matrice de rigidité complexe \({K}^{\text{*}}=K+{K}_{h}\) , où \({K}_{h}\) est une matrice imaginaire (au sens des complexes !), est utilisable pour l’analyse harmonique directe avec l’opérateur DYNA_VIBRA [R5.05.03] et [U4.54.03] et le mot clé MATR_RIGI.
Pour les analyses par recombinaison modale, aucune fonctionnalité n’est disponible actuellement pour l’utilisation du modèle d’amortissement hystérétique.
Analyse modale complexe#
La matrice d’amortissement visqueux \(C\) est indispensable pour l’analyse modale complexe avec l’opérateur traitant le problème quadratique aux valeurs propres [R5.01.02] etCALC_MODES [U4.52.02].
Rappelons que les modes propres complexes permettent une approche mieux adaptée à l’étude dynamique des structures fortement amorties (amortissement réduit \(\xi\) > 20%). Aucun outil de réponse dynamique par recombinaison modale utilisant une base de modes propres complexes n’est disponible.
Bibliographie#
« Amortissement » : Françoise GANTENBEIN et Michel LIVOLANT (CEA-DMT) in « Génie Parasismique » Ouvrage collectif - Presses de l’E.N.P.C. (1985)
« Amortissement dans les calculs de structures » : Forum IPSI - 2 AS Volume XVIII N°2 (Juin 1994)