v6.04.197 SSNV197 - Triaxiaux drainés avec la loi de Hujeux#
Résumé
On réalise un calcul triaxial en mécanique pure (équivalent à des conditions hydrauliques drainées) avec la loi de Hujeux . Les solutions calculées sont comparées à des résultats issus du code éléments finis GEFDYN de l’École Centrale Paris. Les quatre premières modélisations de ce test sont effectuées avec une hypothèse petites déformations (DEFORMATION=”PETIT”):
on préconsolide l’éprouvette jusqu’à \(50\mathit{kPa}\) (état surconsolidé);
on préconsolide l’éprouvette jusqu’à \(100\mathit{kPa}\) (état moyennement consolidé);
on préconsolide l’éprouvette jusqu’à \(200\mathit{kPa}\) (état normalement consolidé);
on préconsolide l’éprouvette jusqu’à \(100\mathrm{kPa}\) (état normalement consolidé), mais on utilise un échantillon avec des plans de glissement (liés aux mécanismes déviatoires) inclinés de \(45°\) par rapport à la verticale;
Les trois tests suivants reprennent les mêmes essais avec une cinématique grandes déformations fournie par l’opérateur GDEF_LOG :(DEFORMATION=”GDEF_LOG”):
on préconsolide l’éprouvette jusqu’à \(50\mathrm{kPa}\) (état surconsolidé);
on préconsolide l’éprouvette jusqu’à \(100\mathit{kPa}\) (état moyennement consolidé);
on préconsolide l’éprouvette jusqu’à \(200\mathit{kPa}\) (état normalement consolidé);
Modélisation A#
Caractéristiques de la modélisation#
La modélisation A est tridimensionnelle et statique non-linéaire .
On effectue d’abord une préconsolidation élastique (\(\mathrm{ELAS}\) ) de l’échantillon jusqu’à \({p}_{c}=\mathrm{50kPa}\) (1ère phase du calcul). Cette préconsolidation a lieu en \(1\) pas de temps entre \(t=-2\) et \(t=0\) .
Le déplacement vertical imposé à la facette supérieure varie entre \(0.\) et \(-0.2\) (2ème phase du calcul) en \(100\) pas de temps entre \(t=0\) et \(t=10\) . Lors de cette deuxième phase, on active la subdivision automatique du pas de temps pour gérer les situations de non convergence de l’intégration locale.
Dans l’intégration des équations d’équilibre, on demande une réactualisation de la matrice tangente, laquelle est fournie par les routines de la loi de Hujeux et accélère sensiblement la convergence. On demande également la subdivision du pas de temps (commande DEFI_LIST_INST) pour traiter les situations d’échec de l’intégration locale dû à des incréments de chargement trop grands. Cette fonctionnalité est grandement recommandée.
Grandeurs testées et résultats#
Valeurs testées#
Les solutions sont calculées au point \(C\) et comparées à des références GEFDYN. Elles sont données en termes de contrainte équivalente \(Q\) , de déformation volumique totale \({\epsilon}_{v}\) et de coefficients d’écrouissage isotrope \(\left({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m}\right)\) et déviatoire \(\left({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m}\right)\) , et récapitulées dans les tableaux suivants:
\(Q=\sqrt{\frac{1}{2}\underline{\underline{s}}:\underline{\underline{s}}}[\mathit{Pa}]\)
\({\epsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-1% |
-1.799% |
||
-2% |
-1.022% |
||
-5% |
-0.430% |
||
-10% |
-0.398% |
||
-20% |
-0.539% |
\({\epsilon}_{V}=\text{trace}\left(\epsilon \right)\)
\({\epsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-1% |
-3.78E-3 |
-3.82E-3 |
-1.125% |
-2% |
-4.34E-003 |
-4.34E-3 |
-0.051% |
-10% |
1.09E-2 |
1.07E-2 |
1.917% |
-20% |
3.237E-2 |
3.191E-2 |
1.433% |
\(\left({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m}\right)\)
\({\epsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-1% |
0.673 |
0.679 |
-0.904% |
-2% |
0.781 |
0.784 |
-0.406% |
-5% |
0.887 |
0.888 |
-0.107% |
-10% |
0.937 |
0.937 |
0.004% |
-20% |
0.966 |
0.967 |
-0.054% |
\(\left({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m}\right)\)
\({\epsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-1% |
0.0325 |
0.0328 |
-0.900% |
-2% |
0.0370 |
0.0372 |
-0.663% |
-5% |
0.0466 |
0.0467 |
-0.296% |
-10% |
0.0624 |
0.0623 |
0.085% |
-20% |
0.0979 |
0.0973 |
0.576% |
Commentaires#
L’écart entre les deux codes est très faible (inférieur à \(2\text{\%}\) ).
Modélisation B#
Caractéristiques de la modélisation#
La modélisation B est tridimensionnelle et statique non-linéaire .
On effectue d’abord une préconsolidation élastique (\(\mathrm{ELAS}\) ) de l’échantillon jusqu’à \({p}_{c}=100\mathrm{kPa}\) (1ère phase du calcul). Cette préconsolidation a lieu en \(1\) pas de temps entre \(t=-2\) et \(t=0\) .
Le déplacement vertical imposé à la facette supérieure varie entre \(0.\) et \(-0.2\) (2ème phase du calcul) en \(100\) pas de temps entre \(t=0\) et \(t=10\) . Lors de cette deuxième phase, on active la subdivision automatique du pas de temps pour gérer les situations de non convergence de l’intégration locale. Dans l’intégration des équations d’équilibre, on demande une réactualisation de la matrice tangente, laquelle est fournie par les routines de la loi de Hujeux et accélère sensiblement la convergence. On demande également la subdivision du pas de temps (commande DEFI_LIST_INST) pour traiter les situations d’échec de l’intégration locale dû à des incréments de chargement trop grands. Cette fonctionnalité est grandement recommandée.
Grandeurs testées et résultats#
Valeurs testées#
Les solutions sont calculées au point \(C\) et comparées à des références GEFDYN. Elles sont données en termes de contrainte équivalente \(Q\) , de déformation volumique totale \({\varepsilon}_{v}\) et de coefficients d’écrouissage isotrope \(({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m})\) et déviatoire \(({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m})\) , et récapitulées dans les tableaux suivants:
\(Q=\sqrt{\frac{1}{2}\underline{\underline{s}}:\underline{\underline{s}}}[\mathit{Pa}]\)
\({\varepsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-1% |
-1.580% |
||
-2% |
-0.893% |
||
-5% |
-0.232% |
||
-10% |
-0.129% |
||
-20% |
-0.144% |
\({\epsilon}_{V}=\text{trace}(\epsilon )\)
\({\varepsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-1% |
-5.47E-3 |
-5.53E-3 |
-1.086% |
-2% |
-7.128E-3 |
-7.15E-3 |
-0.314% |
-5% |
-6.684E-3 |
-6.64E-3 |
0.660% |
-10% |
-8.227E-4 |
-8.22E-4 |
0.083% |
-20% |
1.261E-2 |
1.25E-2 |
0.905% |
\(({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m})\)
\({\varepsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-1% |
0.659 |
0.665 |
-0.879% |
-2% |
0.772 |
0.775 |
-0.431% |
-5% |
0.882 |
0.883 |
-0.115% |
-10% |
0.934 |
0.934 |
0.010% |
-20% |
0.965 |
0.965 |
0.010% |
\(({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m})\)
\({\varepsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-1% |
0.0575 |
0.0578 |
-0.466% |
-2% |
0.0627 |
0.0630 |
-0.471% |
-5% |
0.0723 |
0.0725 |
-0.286% |
-10% |
0.0867 |
0.0868 |
-0.132% |
-20% |
0.169 |
0.117 |
-0.054% |
Commentaires#
L’erreur relative est plus élevée quand les valeurs testées sont plus faibles, ce qui n’est pas anormal. En définitive, l’écart entre les deux codes est très raisonnable.
Modélisation C#
Caractéristiques de la modélisation#
La modélisation \(C\) est tridimensionnelle et statique non-linéaire .
On effectue d’abord une préconsolidation élastique (\(\mathrm{ELAS}\) ) de l’échantillon jusqu’à \({p}_{c}=200\mathrm{kPa}\) (1ère phase du calcul). Cette préconsolidation a lieu en \(1\) pas de temps entre \(t=-2\) et \(t=0\) .
Le déplacement vertical imposé à la facette supérieure varie entre \(0\) et \(-0.2\) (2ème phase du calcul) en \(100\) pas de temps entre \(t=0\) et \(t=10\) . Lors de cette deuxième phase, on active la subdivision automatique du pas de temps pour gérer les situations de non convergence de l’intégration locale.Dans l’intégration des équations d’équilibre, on demande une réactualisation de la matrice tangente, laquelle est fournie par les routines de la loi de Hujeux et accélère sensiblement la convergence. On demande également la subdivision du pas de temps (commande DEFI_LIST_INST) pour traiter les situations d’échec de l’intégration locale dû à des incréments de chargement trop grands. Cette fonctionnalité est grandement recommandée.
Grandeurs testées et résultats#
Valeurs testées#
Les solutions sont calculées au point \(C\) et comparées à des références GEFDYN. Elles sont données en termes de contrainte équivalente \(Q\) , de déformation volumique totale \({\epsilon}_{v}\) et de coefficients d’écrouissage isotrope \(\left({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m}\right)\) et déviatoire \(\left({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m}\right)\) , et récapitulées dans les tableaux suivants:
\(Q=\sqrt{\frac{1}{2}\underline{\underline{s}}:\underline{\underline{s}}}[\mathit{Pa}]\)
\({\epsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-1% |
-1.462% |
||
-2% |
-0.822% |
||
-5% |
-0.293% |
||
-10% |
-0.076% |
||
-20% |
-0.046% |
\({\epsilon}_{V}=\text{trace}\left(\epsilon \right)\)
\({\epsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-1% |
-7.389E-3 |
-7.47E-3 |
-1.086% |
-2% |
-1.001E-2 |
-1.005E-2 |
-0.387% |
-5% |
-1.229E-2 |
-1.227E-2 |
0.175% |
-10% |
-1.096E-2 |
-1.092E-2 |
0.367% |
-20% |
-4.88E-3 |
-4.88E-3 |
-0.007% |
\(\left({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m}\right)\)
\({\epsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-1% |
0.642 |
0.648 |
-0.939% |
-2% |
0.761 |
0.765 |
-0.488% |
-5% |
0.877 |
0.878 |
-0.130% |
-10% |
0.931 |
0.932 |
-0.087% |
-20% |
0.964 |
0.964 |
-0.031% |
\(\left({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m}\right)\)
\({\epsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-1% |
0.102 |
0.102 |
0.112% |
-2% |
0.107 |
0.108 |
-0.532% |
-5% |
0.115 |
0.115 |
0.116% |
-10% |
0.125 |
0.126 |
-0.450% |
-20% |
0.147 |
0.147 |
-0.301% |
Commentaires#
L’erreur relative est plus élevée quand les valeurs testées sont plus faibles. En définitive, l’écart entre les deux codes est très raisonnable.
Modélisation D#
Caractéristiques de la modélisation#
Le but de cette modélisation est de tester la fonctionnalité de réorientation du repère local définissant les trois plans de glissement liés aux mécanismes déviatoires de la loi de Hujeux. Cette réorientation est réalisée à l’aide de l’opérateur AFFE_CARA_ELEM ® MASSIF.
La modélisation D est tridimensionnelle et statique non-linéaire .
On effectue d’abord une préconsolidation élastique (\(\mathrm{ELAS}\) ) de l’échantillon jusqu’à \({p}_{c}=100\mathrm{kPa}\) (1ère phase du calcul). Cette préconsolidation a lieu en \(1\) pas de temps entre \(t=-2\) et \(t=0\) .
Le déplacement vertical imposé à la facette supérieure varie entre \(0.\) et \(-0.2\) (2ème phase du calcul) en 100 pas de temps entre \(t=0\) et \(t=10\) . Lors de cette deuxième phase, on active la subdivision automatique du pas de temps pour gérer les situations de non convergence de l’intégration locale.
On teste la réorientation des plans de glissement définie par une rotation du repère de \(45°\) autour de l’axe (\(\mathit{OZ}\) ). Cette réorientation est définie par AFFE_CARA_ELEM ® MASSIF. |
|
On charge l’objet CARAEL définissant l’orientation du repère local sur lequel seront définis les plans de glissement de la loi de Hujeux. Dans l’intégration des équations d’équilibre, on demande une réactualisation de la matrice tangente, laquelle est fournie par les routines de la loi de Hujeux et accélère sensiblement la convergence. On demande également la subdivision du pas de temps (commande DEFI_LIST_INST) pour traiter les situations d’échec de l’intégration locale dû à des incréments de chargement trop grands. Cette fonctionnalité est grandement recommandée.
Grandeurs testées et résultats de la modélisation D#
Valeurs testées#
Les solutions sont calculées au point \(C\) et comparées à un calcul identique réalisé (avec Code_Aster) sur un échantillon préalablement tourné de \(45°\) . Elles sont données en termes de contrainte équivalente \(Q\) , de déformation volumique totale \({\varepsilon}_{v}\) et de coefficients d’écrouissage isotrope \(({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m})\) et déviatoire \(({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m})\) , et récapitulées dans les tableaux suivants:
\(Q=\sqrt{\frac{1}{2}\underline{\underline{s}}:\underline{\underline{s}}}[\mathit{Pa}]\)
\({\varepsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-2% |
148396 |
148396 |
0.0002% |
-4% |
176513 |
176513 |
0.006% |
-6% |
185559 |
185554 |
0.002% |
-8% |
187683 |
187681 |
0.001% |
-10% |
186806 |
186804 |
0.001% |
\({\epsilon}_{V}=\text{trace}(\epsilon )\)
\({\varepsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-2% |
-7.40E-3 |
-7.40E-3 |
0.001% |
-4% |
-6.72E-3 |
-6.72E-3 |
0.016% |
-6% |
-4.36E-3 |
-4.36E-3 |
-0.001% |
-8% |
-1.45E-3 |
-1.45E-3 |
-0.013% |
-10% |
1.63E-3 |
1.63E-3 |
0.018% |
\(({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m})\)
\({\varepsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-2% |
0.565 |
0.565 |
-0.062% |
-4% |
0.630 |
0.630 |
0.008% |
-6% |
0.654 |
0.654 |
0.073% |
-8% |
0.666 |
0.666 |
-0.035% |
-10% |
0.671 |
0.671 |
0.054% |
\(({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m})\)
\({\varepsilon}_{zz}\) |
Code_Aster |
GEFDYN |
erreur relative |
-2% |
0.067 |
0.067 |
-0.564% |
-4% |
0.074 |
0.074 |
0.140% |
-6% |
0.081 |
0.081 |
-0.499% |
-8% |
0.087 |
0.087 |
-0.038% |
-10% |
0.093 |
0.093 |
0.421% |
Commentaires#
L’erreur relative est toujours très faible, ce qui est normal, puisqu’il s’agit en définitive exactement du même calcul.
Modélisation E#
Caractéristiques de la modélisation#
La modélisation E est tridimensionnelle et statique non-linéaire .
On effectue d’abord une préconsolidation élastique (\(\mathrm{ELAS}\) ) de l’échantillon jusqu’à \({p}_{c}=\mathrm{50kPa}\) (1ère phase du calcul). Cette préconsolidation a lieu en \(1\) pas de temps entre \(t=-2\) et \(t=0\) .
Le déplacement vertical imposé à la facette supérieure varie entre \(0.\) et \(-0.2\) (2ème phase du calcul) en \(100\) pas de temps entre \(t=0\) et \(t=10\) . La modélisation considère une cinématique grandes déformations avec l’opérateur GDEF_LOG (DEORMATION=”GDEF_LOG”).
Dans l’intégration des équations d’équilibre, on demande une réactualisation de la matrice tangente, laquelle est fournie par les routines de la loi de Hujeux et accélère sensiblement la convergence. On demande également la subdivision du pas de temps (commande DEFI_LIST_INST) pour traiter les situations d’échec de l’intégration locale dû à des incréments de chargement trop grands. Cette fonctionnalité est grandement recommandée.
Grandeurs testées et résultats#
Valeurs testées#
Les solutions sont calculées au point \(C\) et comparées à la fois aux résultats de la modélisation A et aux valeurs de référence de GEFDYN. Elles sont données en termes de contrainte équivalente \(Q\) , de déformation volumique totale \({\varepsilon}_{v}\) / \(J=\det\left(\underline{\underline{F}}\right)\) et de coefficients d’écrouissage isotrope \(({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m})\) et déviatoire \(({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m})\) , et récapitulées dans les tableaux suivants:
\(Q=\sqrt{\frac{1}{2}\underline{\underline{s}}:\underline{\underline{s}}}[\mathit{Pa}]\)
\({\epsilon}_{zz},{E}_{zz}\) |
Code_Aster(DEFORMATION=”PETIT) |
Code_Aster (DEFORMATION=”GDEF_LOG) |
erreur relative |
GEFDYN |
erreur relative |
-1% |
0.104% |
1.717% |
|||
-2% |
0.097% |
0.935% |
|||
-5% |
0.033% |
0.468% |
|||
-10% |
0.305% |
0.702% |
|||
-20% |
0.628% |
1.162% |
\({\varepsilon}_{V}=\text{trace}(\varepsilon )\) , \(J=\det\left(\underline{\underline{F}}\right)\)
\({\epsilon}_{zz},{E}_{zz}\) |
Code_Aster(DEFORMATION=”PETIT) |
Code_Aster (DEFORMATION=”GDEF_LOG) |
erreur relative |
GEFDYN |
erreur relative |
-1% |
-3.78E-3 |
-0.00374 |
0.825% |
-3.82E-3 |
1.946% |
-2% |
-4.34E-003 |
-0.00429 |
1.067% |
-4.34E-3 |
1.109% |
-10% |
1.09E-2 |
0.01084 |
0.573% |
1.07E-2 |
1.319% |
-20% |
3.237E-2 |
0.03226 |
0.337% |
3.191E-2 |
1.086% |
\(({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m})\)
\({\epsilon}_{zz},{E}_{zz}\) |
Code_Aster (DEFORMATION=”PETIT) |
Code_Aster (DEFORMATION=”GDEF_LOG) |
erreur relative |
GEFDYN |
erreur relative |
-1% |
0.673 |
0.673 |
5.45E-03% |
0.679 |
0.909% |
-2% |
0.781 |
0.781 |
5.23E-03% |
0.784 |
0.416% |
-5% |
0.887 |
0.887 |
0.01258% |
0.888 |
0.121% |
-10% |
0.937 |
0.937 |
0.00915% |
0.937 |
6.51E-03% |
-20% |
0.966 |
0.966 |
6.58E-03% |
0.967 |
0.061% |
\(({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m})\)
\({\epsilon}_{zz},{E}_{zz}\) |
Code_Aster (DEFORMATION=”PETIT) |
Code_Aster (DEFORMATION=”GDEF_LOG) |
erreur relative |
GEFDYN |
erreur relative |
-1% |
0.0325 |
0.0324 |
0.276% |
0.0328 |
1.181% |
-2% |
0.0370 |
0.0368 |
0.296% |
0.0372 |
0.962% |
-5% |
0.0466 |
0.0465 |
4.28E-03% |
0.0467 |
0.305% |
-10% |
0.0624 |
0.0627 |
0.629% |
0.0623 |
0.710% |
-20% |
0.0979 |
0.0992 |
1.396% |
0.0973 |
1.976% |
Commentaires#
On observe que le résultat de l’intégration en grandes déformations avec l’opérateur GDEF_LOG permet de reproduire, avec la cinématique enrichie, le comportement prescrit par la loi de comportement (variation au maximum de l’ordre de \(1\text{\%}\) pour les déformations volumiques). Voir les Figures et .
Modélisation F#
Caractéristiques de la modélisation#
La modélisation B est tridimensionnelle et statique non-linéaire .
On effectue d’abord une préconsolidation élastique (\(\mathrm{ELAS}\) ) de l’échantillon jusqu’à \({p}_{c}=100\mathrm{kPa}\) (1ère phase du calcul). Cette préconsolidation a lieu en \(1\) pas de temps entre \(t=-2\) et \(t=0\) .
Le déplacement vertical imposé à la facette supérieure varie entre \(0.\) et \(-0.2\) (2ème phase du calcul) en \(100\) pas de temps entre \(t=0\) et \(t=10\) . La modélisation considère une cinématique grandes déformations avec l’opérateur GDEF_LOG (DEORMATION=”GDEF_LOG”).
Dans l’intégration des équations d’équilibre, on demande une réactualisation de la matrice tangente, laquelle est fournie par les routines de la loi de Hujeux et accélère sensiblement la convergence. On demande également la subdivision du pas de temps (commande DEFI_LIST_INST) pour traiter les situations d’échec de l’intégration locale dû à des incréments de chargement trop grands. Cette fonctionnalité est grandement recommandée.
Grandeurs testées et résultats#
Valeurs testées#
Les solutions sont calculées au point \(C\) et comparées à la fois aux résultats de la modélisation B et aux valeurs de référence de GEFDYN. Elles sont données en termes de contrainte équivalente \(Q\) , de déformation volumique totale \({\varepsilon}_{v}\) / \(J=\det\left(\underline{\underline{F}}\right)\) et de coefficients d’écrouissage isotrope \(({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m})\) et déviatoire \(({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m})\) , et récapitulées dans les tableaux suivants:
\(Q=\sqrt{\frac{1}{2}\underline{\underline{s}}:\underline{\underline{s}}}[\mathit{Pa}]\)
\({\epsilon}_{zz},{E}_{zz}\) |
Code_Aster(DEFORMATION=”PETIT) |
Code_Aster (DEFORMATION=”GDEF_LOG) |
erreur relative |
GEFDYN |
erreur relative |
-1% |
0.304% |
1.421% |
|||
-2% |
0.233% |
0.717% |
|||
-5% |
0.151% |
0.106% |
|||
-10% |
0.020% |
0.158% |
|||
-20% |
0.271% |
0.414% |
\({\varepsilon}_{V}=\text{trace}(\varepsilon )\) , \(J=\det\left(\underline{\underline{F}}\right)\)
\({\epsilon}_{zz},{E}_{zz}\) |
Code_Aster(DEFORMATION=”PETIT) |
Code_Aster (DEFORMATION=”GDEF_LOG) |
erreur relative |
GEFDYN |
erreur relative |
-1% |
-5.47E-3 |
-0.00540 |
1.172% |
-5.53E-3 |
2.340% |
-2% |
-7.128E-3 |
-0.00702 |
1.521% |
-7.15E-3 |
1.831% |
-5% |
-6.684E-3 |
-0.00655 |
2.029% |
-6.64E-3 |
1.338% |
-10% |
-8.227E-4 |
-0.00077 |
7.481% |
-8.22E-4 |
6.775% |
-20% |
1.261E-2 |
0.01248 |
1.026% |
1.25E-2 |
0.189% |
\(({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m})\)
\({\epsilon}_{zz},{E}_{zz}\) |
Code_Aster (DEFORMATION=”PETIT) |
Code_Aster (DEFORMATION=”GDEF_LOG) |
erreur relative |
GEFDYN |
erreur relative |
-1% |
0.659 |
0.659 |
0.108% |
0.665 |
0.853% |
-2% |
0.772 |
0.772 |
0.042% |
0.775 |
0.418% |
-5% |
0.882 |
0.882 |
0.010% |
0.883 |
0.117% |
-10% |
0.934 |
0.934 |
2.03E-03% |
0.934 |
5.24E-03% |
-20% |
0.965 |
0.965 |
1.36E-03% |
0.965 |
5.78E-03% |
\(({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m})\)
\({\epsilon}_{zz},{E}_{zz}\) |
Code_Aster (DEFORMATION=”PETIT) |
Code_Aster (DEFORMATION=”GDEF_LOG) |
erreur relative |
GEFDYN |
erreur relative |
-1% |
0.0575 |
0.0573 |
0.313% |
0.0578 |
0.820% |
-2% |
0.0627 |
0.0624 |
0.407% |
0.0630 |
0.901% |
-5% |
0.0723 |
0.0721 |
0.314% |
0.0725 |
0.619% |
-10% |
0.0867 |
0.0867 |
0.060% |
0.0868 |
0.090% |
-20% |
0.169 |
0.118 |
0.624% |
0.117 |
0.552% |
Commentaires#
On observe que le résultat de l’intégration en grandes déformations avec l’opérateur GDEF_LOG permet de reproduire, avec la cinématique enrichie, le comportement prescrit par la loi de comportement. Dans ce cas une variation plus importante est observé pour des déformations élevées (variation au maximum de l’ordre de \(10\text{\%}\) ). Voir les Figures et .
Modélisation G#
Caractéristiques de la modélisation#
La modélisation \(C\) est tridimensionnelle et statique non-linéaire .
On effectue d’abord une préconsolidation élastique (\(\mathrm{ELAS}\) ) de l’échantillon jusqu’à \({p}_{c}=200\mathrm{kPa}\) (1ère phase du calcul). Cette préconsolidation a lieu en \(1\) pas de temps entre \(t=-2\) et \(t=0\) .
Le déplacement vertical imposé à la facette supérieure varie entre \(0\) et \(-0.2\) (2ème phase du calcul) en \(100\) pas de temps entre \(t=0\) et \(t=10\) . La modélisation considère une cinématique grandes déformations avec l’opérateur GDEF_LOG (DEORMATION=”GDEF_LOG”).
Dans l’intégration des équations d’équilibre, on demande une réactualisation de la matrice tangente, laquelle est fournie par les routines de la loi de Hujeux et accélère sensiblement la convergence. On demande également la subdivision du pas de temps (commande DEFI_LIST_INST) pour traiter les situations d’échec de l’intégration locale dû à des incréments de chargement trop grands. Cette fonctionnalité est grandement recommandée.
Grandeurs testées et résultats#
Valeurs testées#
Les solutions sont calculées au point \(C\) et comparées à la fois aux résultats de la modélisation C et aux valeurs de référence de GEFDYN. Elles sont données en termes de contrainte équivalente \(Q\) , de déformation volumique totale \({\varepsilon}_{v}\) / \(J=\det\left(\underline{\underline{F}}\right)\) et de coefficients d’écrouissage isotrope \(({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m})\) et déviatoire \(({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m})\) , et récapitulées dans les tableaux suivants:
\(Q=\sqrt{\frac{1}{2}\underline{\underline{s}}:\underline{\underline{s}}}[\mathit{Pa}]\)
\({\epsilon}_{zz},{E}_{zz}\) |
Code_Aster(DEFORMATION=”PETIT) |
Code_Aster (DEFORMATION=”GDEF_LOG) |
erreur relative |
GEFDYN |
erreur relative |
-1% |
0.995% |
1.171% |
|||
-2% |
0.610% |
0.561% |
|||
-5% |
0.335% |
0.058% |
|||
-10% |
606137 |
0.179% |
0.078% |
||
-20% |
0.010% |
0.048% |
\({\varepsilon}_{V}=\text{trace}(\varepsilon )\) , \(J=\det\left(\underline{\underline{F}}\right)\)
\({\epsilon}_{zz},{E}_{zz}\) |
Code_Aster(DEFORMATION=”PETIT) |
Code_Aster (DEFORMATION=”GDEF_LOG) |
erreur relative |
GEFDYN |
erreur relative |
-1% |
-7.389E-3 |
-0.00725 |
1.404% |
-7.47E-3 |
2.934% |
-2% |
-1.001E-2 |
-0.00979 |
2.055% |
-1.005E-2 |
2.572% |
-5% |
-1.229E-2 |
-0.01197 |
2.730% |
-1.227E-2 |
2.447% |
-10% |
-1.096E-2 |
-0.01063 |
3.263% |
-1.092E-2 |
2.673% |
-20% |
-4.88E-3 |
-0.00467 |
4.941% |
-4.88E-3 |
4.365% |
\(({r}_{\text{ela}}^{d,m}+{r}_{\text{dev}}^{m})\)
\({\epsilon}_{zz},{E}_{zz}\) |
Code_Aster (DEFORMATION=”PETIT) |
Code_Aster (DEFORMATION=”GDEF_LOG) |
erreur relative |
GEFDYN |
erreur relative |
-1% |
0.642 |
0.643 |
0.536% |
0.648 |
0.835% |
-2% |
0.761 |
0.762 |
0.245% |
0.765 |
0.438% |
-5% |
0.877 |
0.877 |
0.074% |
0.878 |
0.113% |
-10% |
0.931 |
0.931 |
0.027% |
0.932 |
0.083% |
-20% |
0.964 |
0.964 |
7.82E-03% |
0.964 |
0.031% |
\(({r}_{\text{ela}}^{\text{iso},m}+{r}_{\text{iso}}^{m})\)
\({\epsilon}_{zz},{E}_{zz}\) |
Code_Aster (DEFORMATION=”PETIT) |
Code_Aster (DEFORMATION=”GDEF_LOG) |
erreur relative |
GEFDYN |
erreur relative |
-1% |
0.102 |
0.102 |
0.218% |
0.102 |
0.263% |
-2% |
0.107 |
0.107 |
0.376% |
0.108 |
1.016% |
-5% |
0.115 |
0.115 |
0.438% |
0.115 |
0.405% |
-10% |
0.125 |
0.125 |
0.282% |
0.126 |
0.805% |
-20% |
0.147 |
0.147 |
0.069% |
0.147 |
0.298% |
Commentaires#
On observe que le résultat de l’intégration en grandes déformations avec l’opérateur GDEF_LOG permet de reproduire, avec la cinématique enrichie, le comportement prescrit par la loi de comportement. Dans ce cas une variation plus importante est observé pour des déformations élevées (variation au maximum de l’ordre de \(5\text{\%}\) ). Voir les Figures et .
Synthèse des résultats#
On représente dans les courbes suivantes les différentes comparaisons entre Code_Aster et Xloi (programme de calcul de loi de comportement, non éléments finis, sur un point matériel. La loi de Hujeux qui y est implémentée est identique à celle qui se trouve dans GEFDYN), en termes de contrainte déviatoire (Figure ), de déformation volumique totale (Figure ) et de coefficients d’écrouissage déviatoires (Figure ) et isotrope (Figure ).
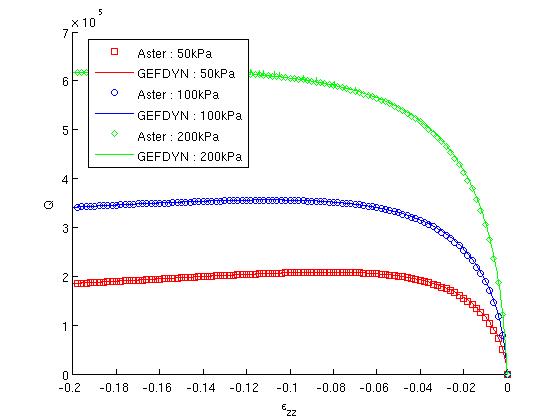
Figure 1 : Contrainte équivalente (notée « \(Q\) »)en fonction de la déformation axiale: comparaison entre les solutions Code_Aster et Xloi, pour les pressions de consolidation de \(50\) , \(100\) et \(\mathrm{200kPa}\) .
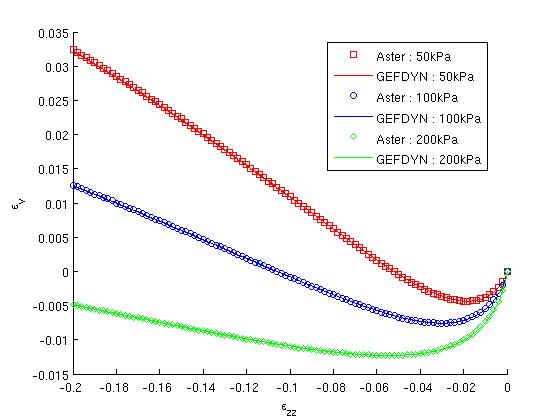
Figure 2 : Déformation volumique totale (notée « \(\mathit{EPSv}\) ») en fonction de la déformation axiale: comparaison entre les solutions Code_Aster et Xloi, pour les pressions de consolidation de \(50\) , \(100\) et \(\mathrm{200kPa}\) .
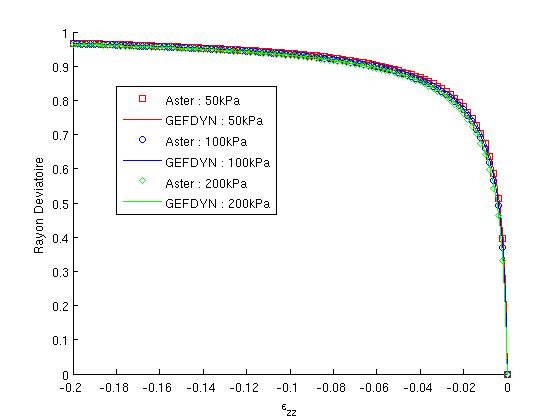
Figure 3 : rayon déviatoire en fonction de la déformation axiale: comparaison entre les solutions Code_Aster et Xloi, pour les pressions de consolidation de \(50\) , \(100\) et \(\mathrm{200kPa}\) .
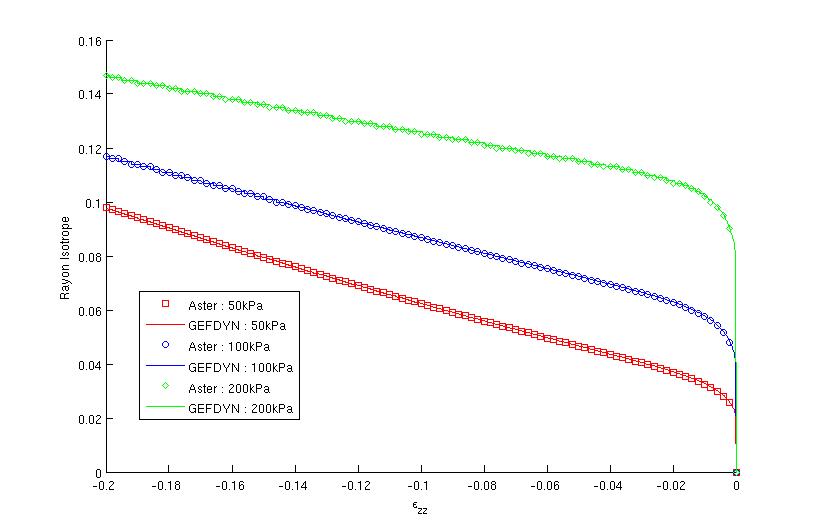
Figure 4 : rayon isotrope en fonction de la déformation axiale: comparaison entre les solutions Code_Aster et Xloi, pour les pressions de consolidation de \(50\) , \(100\) et \(\mathrm{200kPa}\) .
On représente dans les courbes suivantes les comparaisons entre les résultats avec une modélisation petites déformations et grandes déformations dans Code_Aster . La Figure montre l’évolution des contraintes déviatoriques et une comparaison des déformations volumiques est présentée dans la Figure .
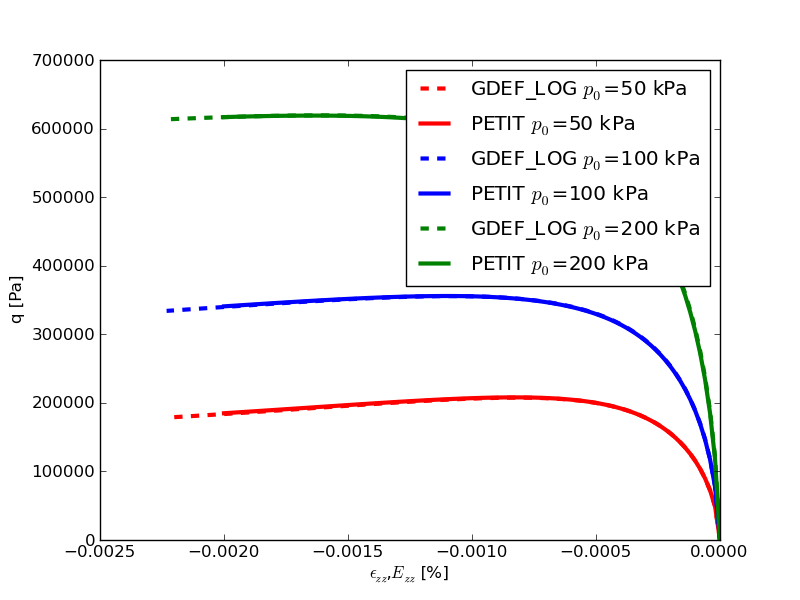
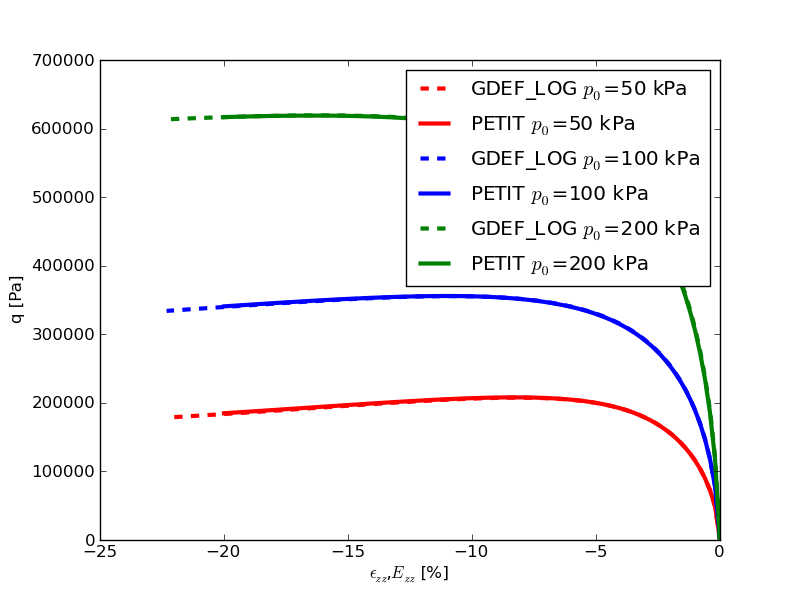
Figure 5 : Contrainte équivalente (notée « \(Q\) »)en fonction de la déformation axiale: comparaison entre les solutions à petites et grandes déformations dans Code_Aster, pour les pressions de consolidation de \(50\) , \(100\) et \(\mathrm{200kPa}\) .
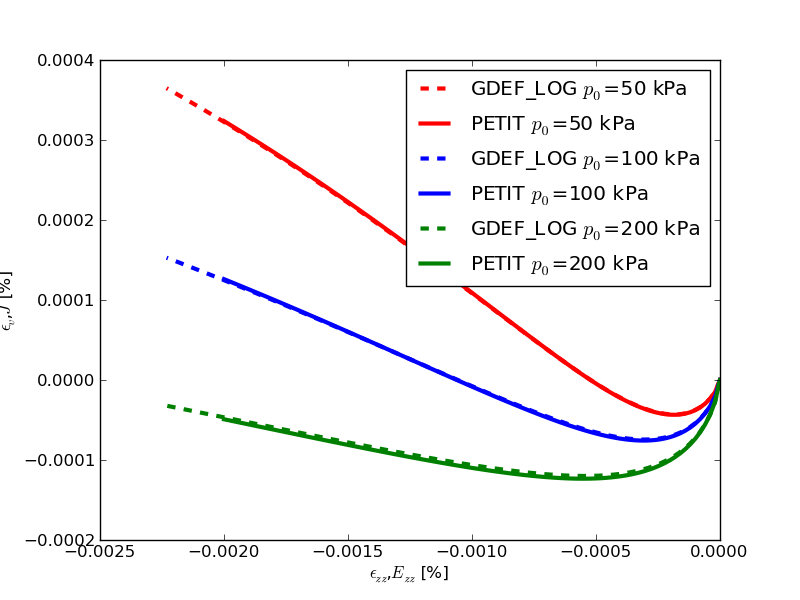
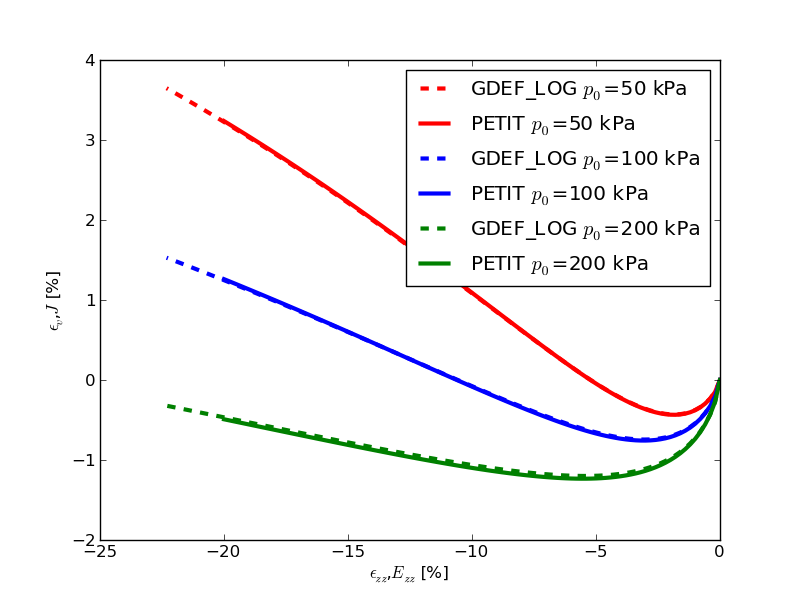
Figure 6 : Déformation volumique totale en fonction de la déformation axiale: comparaison entre les solutions à petites et grandes déformations dans Code_Aster, pour les pressions de consolidation de \(50\) , \(100\) et \(\mathrm{200kPa}\) .