r7.01.26 Relation de comportement BETON_RAG#
Résumé:
Ce document présente le modèle de comportement BETON_RAG, utilisé pour estimer le comportement à long terme des structures affectées par la réaction alcali-granulat.
On y détaille également l’écriture et le traitement numérique du modèle.
Description du modèle (Grimal [bib8])#
Principe général#
La réaction alcali-granulats et ses effets sont modélisés en utilisant une approche phénoménologique. Cette approche tient compte des différents phénomènes importants évoluant au sein du béton et influençant la réaction chimique. Les principaux développements proposés dans ce modèle concernent les interactions entre la pression d’origine chimique et, les déformations différées d’une part et les déformations anisotropes induites par la présence de fissures orientées d’autre part.
Les effets de l’humidité sur le développement de l’alcali-réaction ainsi que sur la pression capillaire induisant le retrait de la matrice sont également considérés. La dépendance entre l’évolution des gonflements et l’état de contrainte est alors une conséquence de tous ces phénomènes élémentaires; les effets mécaniques de l’alcali-réaction sont donc les conséquences d’un chargement interne «long terme» dû à l’évolution de la pression chimique (\({P}_{g}\) dans la figure Fig. 242), combiné au chargement externe \({\sigma}_{i}\) .

Fig. 242 Principe du modèle de comportement du béton soumis à une pression de gonflement#
\({P}_{g}\) , en addition avec la contrainte externe \({\sigma}_{i}\) sollicite la matrice cimentaire. Cette dernière est considérée comme un milieu visco-élasto-plastique endommageable (module VEPD sur la figure Fig. 242). Le prochain paragraphe présente comment la pression due à la formation de gel est évaluée, en accord avec les conditions environnementales et l’état de déformation. Ensuite, le modèle mécanique est exposé dans le cadre de la thermodynamique des processus irréversibles.
Loi d’évolution de la pression interne#
La pression \({P}_{g}\) due à la formation de gel dans la porosité est évaluée en faisant l’hypothèse que l’état de contrainte ne modifie pas l’avancement chimique de la réaction alcali-granulat.
En accord avec les différentes modélisations disponibles, étudiées dans la partie bibliographique Ulm [bib20], Lemarchand [bib11], Coussy [bib5], le béton est considéré comme un milieu poreux constitué d’une matrice solide et de gel occupant une partie de la porosité connectée. Cette porosité est formée de deux types de pores, ceux initialement connectés aux sites de réaction et ceux générés par la déformation volumique modifiant la porosité (\({b}^{g}\mathit{tr}(\varepsilon )\) dans l’équation (5001).
La porosité connectée aux sites de réaction est écrite sous la forme \({\varphi}_{0}={A}_{0}{V}^{g}\) , dans laquelle, \({A}_{0}\) est l’avancement à partir duquel la porosité connectée initiale est comblée. Ainsi, tant que le volume de gel créé (\({\mathit{AV}}^{g}\) ) est inférieur à \({A}_{0}{V}^{g}\) , le gel se loge dans la porosité connectée et \({P}_{g}\) reste nulle. \({P}_{g}\) n’augmentera qu’à partir du moment où toute la porosité sera comblée:
En tenant compte de ces remarques, une expression reliant la pression de gel et le volume de gel créé (\({\mathit{AV}}^{g}\) ) est proposée:
Dans cette expression:
\({V}_{g}\) est le volume maximum de gel qui peut être créé par la réaction chimique.
\(A\) est l’avancement de la réaction chimique, augmentant de \(0\) pour le béton sain à \(1\) lorsque la réaction est achevée.
\({M}_{g}\) est assimilable à un module d’élasticité du gel et \({b}_{g}\) peut être assimilable à un coefficient de Biot pour le gel.
Les diverses parties positives permettent:
une prise en compte de l’influence de la déformation volumique induite par un chargement externe sur une variation de la porosité connectée,
une augmentation de la pression d’origine chimique si et seulement si le gel parvient à combler la porosité connectée.
Avancement de la réaction#
L’avancement de la réaction \(A\) évoqué précédemment est une fonction de la température et de la teneur en eau du béton.
La loi d’évolution utilisée pour évaluer l’avancement chimique est inspirée des travaux de S. Poyet [bib16]. Il montre que le gel créé pendant le temps (\(t\) ) et sa cinétique de création sont proportionnels au degré de saturation (\(\mathit{Sr}\) ) du béton, le degré de saturation étant défini par:
Dans cette expression, \(C\) est la concentration en eau libre contenue par unité de volume du béton et \({C}_{\mathit{sat}}\) est la valeur de \(C\) lorsque le béton est totalement saturé.
Afin de prendre en compte l’effet de la température, la loi d’Arrhenius est utilisée pour modéliser l’activation thermique (Capra [bib4]). Finalement, la loi suivante est proposée:
Dans cette loi, \({\alpha}_{0}\) est un paramètre de cinétique, \({E}_{a}\) est l’énergie d’activation de la réaction alcali-granulats (usuellement d’une valeur proche de \(47000J/\mathit{mol}/°K\) Lombardi [bib12]), \(R\) est la constante des gaz parfaits (\(8.31J/\mathit{mol}\) ), \({T}_{\mathit{ref}}\) (en Kelvin) est la température absolue du test permettant l’identification de \({\alpha}_{0}\) , \(T\) est la température du point matériel. Le terme \(\langle \text{Sr}-A\rangle ` signifie que l’affinité chimique de la réaction est conditionnée par le degré de saturation du béton, Poyet [bib16]_ ayant montré dans sa thèse que l’avancement :math:`A\) (qui est une variable normalisée) ne peut dépasser une valeur limite très proche du degré de saturation, il explique cela par le fait que seule la fraction de granulat en contact avec de l’eau peut conduire à la réaction. Par conséquent l’amplitude de la réaction est proportionnelle au degré de saturation \({S}_{r}\) .
De la même manière, le chemin parcouru par les ions pour atteindre la silice réactive est d’autant plus grand que le degré de saturation est faible, ce qui entraîne une diminution de la cinétique. Cet effet cinétique du degré de saturation est prise en compte par l’intermédiaire du terme \(\frac{⟨\mathit{Sr}-{S}_{r}^{0}⟩}{\left(1-{S}_{r}^{0}\right)}\) , dans lequel \({S}_{r}^{0}\) représente le seuil de saturation à partir duquel l’évolution de la réaction chimique devient possible.
La figure Fig. 243 présente quelques exemples de variations de l’avancement \(A\) pour différents états d’humidité. Plus \({S}_{r}\) est important plus \(A\) est grand, \(A\) étant maximal (\(A=1\) ) quand le béton est saturé (\({S}_{r}=1\) ). Si le béton reste dans un état non saturé (\({S}_{r}<1\) ), la réaction n’est jamais complète (\(A<1\) ). En revanche, si l’état de saturation se modifie et passe par exemple de \(0.6\) à \(1.0\) , la courbe d’avancement est modifiée pour rejoindre l’état d’avancement maximal.

Fig. 243 Évolution de l’avancement de la RAG sous différents degrés de saturation pour \({\alpha}_{0}=0.0012\) , \({T}_{\mathrm{ref}}=20°C\) , \({\mathrm{Sr}}^{0}=0.2\)#
Dépendance entre l’endommagement et le gonflement#
L’alcali-réaction produit des gonflements importants qui devraient s’accompagner d’un endommagement important de la structure. Mais, diverses expériences (Larive [bib9], Multon [bib14], Gravel 2001) ont montré que la diminution des propriétés mécaniques restait faible par rapport aux déformations atteintes.
Une diminution de \(20\text{%}\) des caractéristiques mécaniques est observée pour un gonflement volumique de \(0.1\text{%}\) (Figure Fig. 245). Un test de traction directe conduisant à un état de déformation comparable produirait un endommagement complet de la matrice cimentaire. Le comportement particulier du béton atteint par la réaction alcali-granulats peut être expliqué par deux phénomènes complémentaires: dans un premier temps un phénomène de fissuration localisée autour du granulat réactif et ensuite une adaptation viscoplastique pour le long terme de la pâte de ciment. La fissuration mène à de grandes déformations en raison de l’effet cumulatif de l’ouverture des microfissures. Le comportement visco-plastique de la pâte de ciment (en particulier grâce aux C-S-H, voir [bib8]) peut limiter la concentration de contraintes et ainsi la propagation de microfissures et de l’endommagement associé est également limitée.

Fig. 244 Modèle viscoélastoplastique#
La compatibilité entre le gonflement important dû à la RAG et l’endommagement modéré associé est modélisée en utilisant une déformation plastique liée à l’endommagement de traction (Grimal [bib6], [bib7]). Cette déformation plastique limite l’endommagement en permettant une relaxation des contraintes provoquées par la pression de gel sur la pâte de ciment. Bien que nécessaire pour modéliser le gonflement d’alcali-réaction, celle-ci est naturellement insuffisante pour expliquer d’autres déformations à long terme telles que le fluage multi-axial du béton non endommagé. Ainsi, afin d’obtenir des prévisions fiables des déformations à long terme induites par la pression due à la présence de gel et aux effets de chargement, une déformation de fluage a été intégrée au modèle.
Par conséquent, le module visco-élasto-plastique endommageable (VEPD sur la figure Fig. 242) a été divisé en deux niveaux complémentaires (Figure Fig. 244):
un module (\({\mathrm{VD}}^{t}\) ), dédié à la modélisation de la déformation \({\epsilon}^{\text{vdt}}\) (Figure Fig. 244), respectant la relation empirique existant entre gonflement dû à la RAG et endommagement (Figure Fig. 245).
un module visco-élasto-plastique (VEP), correspondant à la déformation \({\epsilon}^{\text{vep}}\) sur la figure Fig. 244, permettant de modéliser d’autres aspects du comportement du béton tels que l’élasticité et le fluage.

Fig. 245 Evolution des caractéristiques mécaniques en traction et compression (Sellier [bib18])#
Modélisation du comportement anélastique du béton#
Nous allons maintenant décrire successivement les modules VEP et VDt.
Module rhéologique simulant le fluage et le retrait du béton (VEP)#
Acker [bib2] propose d’expliquer les origines du fluage par le comportement particulier des CSH, seul constituant à avoir un comportement visqueux. Selon lui, compte tenu de la structure particulière des CSH, deux mécanismes de déformations sont possibles:
Des glissements entre les feuillets des CSH
Des effondrements dans l’empilement des feuillets et une consolidation des CSH.
Le premier mécanisme se fait à volume constant et suggère un comportement long terme non asymptotique. Le second mécanisme implique un départ d’eau des CSH vers la porosité capillaire, avec un comportement à long terme asymptotique.
Afin de modéliser la différence de comportement, le module VEP est scindé en deux parties, une partie «sphérique» et une partie «déviatorique». La partie sphérique (notée VEPs sur la figure Fig. 246 ) traduit l’évolution de la structure des CSH soumise à une contrainte hydrostatique liée au départ d’eau ainsi qu’au tassement viscoplastique par glissements «aléatoires» globalement isotropes. La partie déviatorique traduit le glissement des feuillets soumis à une contrainte de cisaillement. La pression \({P}^{w}\) présente sur la figure Fig. 246 correspond à la pression hydrique. Elle engendre un retrait si elle est négative et un gonflement si elle est positive.

Fig. 246 Décomposition en parties sphérique et déviatorique du module VEP#
Avec :
\({P}_{w}\) : pression de l’eau intra poreuse
\({\mathrm{VEP}}^{s}\) : partie sphérique du module VEP
\({\mathrm{VEP}}^{d}\) : partie déviatorique du module VEP
Compte tenu du caractère hétérogène de la distribution poreuse, nous proposons de modéliser le phénomène de fluage comme un problème de consolidation hydromécanique de la façon suivante: lorsqu’un chargement est appliqué sur le volume élémentaire représentatif (VER), des surpressions interstitielles apparaissent dans le réseau hydrique, les premières surpressions à disparaître sont celles présentes dans l’eau de la macroporosité connectée, le chargement initialement repris par ces surpressions est transféré vers le squelette solide (figure Fig. 247). Cette partie relève donc de l’hydromécanique classique. Le squelette solide est lui-même constitué, si on l’observe à une échelle plus fine, d’une microporosité connectée et d’un squelette solide qui va se surcharger à son tour lorsque les surpressions présentes dans sa microporosité seront évacuées vers la macroporosité. Le fluage apparaît alors comme une succession de consolidation à des échelles de plus en plus fines, faisant donc appel à des transferts d’eau de moins en moins libre. Cette interprétation du phénomène de fluage révèle un caractère «fractal» du mécanisme de consolidation, puisque le transfert des contraintes vers le squelette solide se fait de façon analogue à des échelles de plus en plus fines (figure Fig. 248), cette hypothèse est également émise par Acker [bib2]. Pour l’échelle la plus fine, un caractère irréversible du fluage peut être présent; les molécules d’eau interfoliaires sont chassées de façon irréversible par le tassement des hydrates.

Fig. 247 Mécanismes viscoélastiques associés à la macro porosité#
Fluage sphérique#

Fig. 248 Décomposition « fractale » des mécanismes viscoélastiques sphériques#
On propose de modéliser ces mécanismes de fluage sphérique par trois niveaux (figure Fig. 248), chaque niveau représentant un comportement propre.
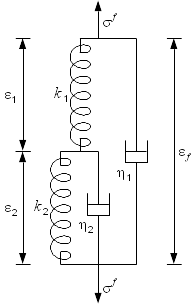
Fig. 249 Décomposition visco-élasto-plastique sphérique modélisant le fluage sphérique VEP#
Niveau 0: Ce niveau est associé à la macroporosité soumise à la pression capillaire (\({P}_{w}={P}_{c}<0\) ) si le milieu est non saturé, ou à la pression interstitielle (\({P}_{w}>0\) ) si le modèle est utilisé dans une approche hydromécanique classique. \({\sigma}_{0}^{s}\) est donc la contrainte effective sur le squelette solide. Ce niveau fait intervenir une composante purement élastique du béton. Il peut donc être schématisé et mis en équationde la façon suivante:
Niveau 1: Ce niveau correspond à une partie de la microporosité faiblement connectée à la macroporosité ouverte et sujette aux mouvements hydriques réversibles. La viscoélasticité associée est modélisée par un solide de Kelvin (figure Fig. 249):
Niveau 2:
Le niveau 2 correspond ici à la nanoporosité interfolliaire des CSH. Ce niveau assure le caractère irréversible des déformations visqueuses des CSH. Dans cette dernière expression, \({k}_{2}\) est un module d’écrouissage cinématique et \({\varepsilon}_{2}^{s}\) est une déformation irréversible. Le schéma rhéologique permet d’établir le système d’équation suivant:
Fluage déviatorique#
Conformément aux observations de Acker [bib2], [bib1], Bernard et al. [bib3], l’aspect viscoélastique du comportement déviatorique est attribué au cisaillement interfolliaire des feuillets de CSH. Ce cisaillement se produit à deux échelles:
Une échelle nanoscopique viscoélastique correspondant à l’eau faiblement liée aux feuillets,
Une échelle microscopique correspondant à de l’eau libre faiblement adsorbée entre les feuillets et sujette à dessiccation.
Enfin, la partie de la pâte de ciment constituée d’hydrates mieux cristallisés (portlandite et d’aluminate de calcium hydraté) a un comportement quasi élastique.
La viscosité déviatorique garde donc un caractère multi échelles, on propose alors de la représenter d’une manière semblable à la branche sphérique, ce qui en outre simplifie la mise en œuvre du modèle (équations rhéologiques similaires à celles de la branche déviatorique).
Le système gérant les déformations du modèle rhéologique déviatoriques’écrit:
On peut préciser à ce stade de la modélisation que les systèmes d’équations rhéologiques admettent une solution analytique pour un chargement en déformation totale linéaire en fonction du temps. Nous tirerons partie de cette solution dans la mise en œuvre numérique.
Module dédié à la modélisation du gonflement anisotrope de RAG (VDt)#
Le module de VDt (figure Fig. 244) modélise une augmentation de la déformation anélastique lorsque le béton est soumis à une contrainte de traction induite par de la RAG conduisant à l’endommagement.
Nous savons qu’en présence de la RAG, la relation déformation – endommagement suivante doit être respectée (figure Fig. 244):
Dans cette équation, \({\epsilon}_{0}\) est un paramètre identifié sur un grand nombre d’essais et des bétons de diverses natures (Sellier [bib18]). Usuellement, sa valeur est proche de 0,35%.
\({d}_{i}^{\mathit{R0}}\) est une valeur principale du tenseur des endommagements dus aux contraintes de traction induites par la RAG. Ici, elle sera évaluée de la façon suivante:
Dans cette expression, \({d}_{i}^{t}\) est une valeur principale du tenseur des endommagements de traction. \({m}^{t}\) et \({\sigma}^{\text{u t}}\) sont des paramètres de la loi d’évolution de l’endommagement. Nous reviendrons sur le choix des variables d’endommagements et de leur loi d’évolution dans le chapitre suivant.
Bilan relatif à la partition des déformations#
La modélisation proposée pour le fluage a été testée sur des essais multiaxiaux. La confrontation des simulations avec les résultats expérimentaux montre la capacité du modèle de fluage à reproduire les caractéristiques du comportement à long terme du béton. La prochaine étape de modélisation, consiste à mettre en place un modèle d’endommagement capable de représenter le comportement du béton fissuré. Ce modèle sera ensuite couplé avec le modèle de fluage propre et le modèle de gonflement par la RAG décrit jusqu’ici.
Modèle d’endommagement#
Après avoir donné les grands principes du modèle, nous allons rappeler dans un premier temps les concepts thermodynamique sur lesquels nous devons appuyer notre formulation. Dans un second temps, nous proposons les potentiels d’énergie libre et les lois complémentaires définissant le modèle. Cette présentation permet de vérifier les conditions de dissipation imposées par la thermodynamique des processus irréversible nécessaires à la convergence des calculs.
Principe de la modélisation#
La réaction alcali-granulats provoque des gonflements de la structure. Ces gonflements peuvent être très différents selon les chargements des structures endommagées. L’expansion considérée isotrope en gonflement non empêché devient une expansion fortement anisotrope dès que le béton est soumis à un état de contrainte déviatorique (Multon [bib14], [bib15]). La micro-fissuration générée par la pression intra-poreuse est alors empêchée dans la direction de chargement et le gonflement apparaît systématiquement associé aux directions où les contraintes de compression sont les plus faibles. Ce phénomène est particulièrement visible dans les poutres où les fissures s’orientent parallèlement aux armatures. Un mécanisme de macro-fissuration, dû à l’ouverture des fissures dans la direction où le matériau est le plus endommagé, amplifie cette anisotropie. Les micro et macro-fissurations générées conduisent à une chute du module élastique du béton, cette chute est usuellement modélisée par la théorie de l’endommagement. Nous présentons ci-dessous les principes du modèle d’endommagement que nous appliquerons aux contraintes issues du schéma rhéologique présenté dans le chapitre précédent.
Afin de simuler le comportement du béton dégradé par la réaction alcali-granulats, un modèle d’endommagement anisotrope, basé sur un critère de fissuration réaliste, doit être utilisé. Ce modèle d’endommagement doit être formulé dans le cadre de la thermodynamique (Lemaitre [bib10]). Le cadre thermodynamique permet d’éviter d’éventuelles incohérences de formulation qui conduiraient à des problèmes de représentation physique et de convergence numérique. A cette fin, un potentiel thermodynamique d’énergie libre d’où dérivent les lois de comportement du matériau doit être proposé. Dans le cas où la dissipation mécanique peut être découplée des autres dissipations (thermique, hydrique ou chimique), la condition de dissipation est donnée par l’équation de Clausius-Duhem (équation ). Cette relation exprime le fait que la puissance des «forces extérieures» est à chaque instant supérieure à la puissance restituable emmagasinée par le matériau; une partie de la puissance des «forces extérieures» étant dissipée mécaniquement par décohésion, frottement, etc. L’équation de Clausius-Duhem pour une transformation mécanique isotherme s’écrit classiquement:
Dans cette expression, \(\sigma\) est le tenseur des contraintes, \(\varepsilon\) celui des déformations totales et \(\rho \psi\) le potentiel d’énergie libre volumique. Ce dernier est choisi de telle sorte que la dissipation soit nulle dans le cas du chargement parfaitement élastique.
Cette restriction implique que les contraintes \(\sigma\) dérivent du potentiel d’énergie libre par les déformations élastiques \({\epsilon}^{e}\) , soit:
Avec l’hypothèse habituelle de partition de la déformation totale:
Où \({\varepsilon}^{\text{an}}\) est la déformation anélastique. Deux variables internes, liées par cette équation de partition, sont ainsi définies: la déformation anélastique \({\varepsilon}^{\text{an}}\) et la déformation thermo-élastique \({\varepsilon}^{\text{e}}\) . Dans notre modèle, \({\varepsilon}^{\text{e}}\) est la déformation au niveau 0 du schéma rhéologique; \({\varepsilon}^{\text{an}}\) contient les déformations \({\epsilon}_{\mathit{vdt}}\) et \({\epsilon}_{\mathit{vep}}\) présentées sur la figure Fig. 244 ainsi que la déformation thermique s’il y a lieu.
Les micro et macro fissurations générées par les contraintes conduisent à une chute du module élastique du béton, cette chute est usuellement modélisée par la théorie de l’endommagement. Nous présentons ci-dessous les principes d’un modèle d’endommagement
Le modèle proposé est basé sur une représentation tensorielle de l’endommagement. Cette représentation est formulée de telle sorte que l’aspect unilatéral du comportement puisse être traité simplement et indépendamment dans chacune des trois directions principales des contraintes effectives.
Le tenseur des contraintes effectives est estimé à partir du principe d’équivalence en déformation élastique, au niveau 0 du schéma rhéologique (figure Fig. 244):
Avec \({R}^{0}\) le tenseur d’élasticité du quatrième ordre du béton sain, calculé à partir du module d’Young et du coefficient de Poisson du béton non fissuré.
Les contraintes apparentes sont reliées aux contraintes effectives par le tenseur des endommagements \(D\) :
Dans cette expression, (\(I-D\) ) un tenseur d’intégrité, également du quatrième ordre, constitué d’une part de la matrice identité (\(I\) ) et d’autre part du tenseur d’endommagement.
En traitant le phénomène de fissuration à partir du tenseur d’endommagement du quatrième ordre \(D\) , le potentiel d’énergie libre prend la forme générale suivante:
En notation indicielle cette dernière relation s’écrit:
Ainsi, les équations précédents conduisent à écrire la relation de Clausius-Duhem sous la forme suivante:
Où les \({V}^{\mathrm{an}}\) sont les variables internes associées aux déformations anélastiques. Soit encore avec la notation indicielle:
Cette dernière relation permet de définir la dissipation par déformation anélastique \({\phi }^{\text{an}}\) ainsi que la dissipation par endommagement mécanique \({\phi }^{D}\) . Elle permet aussi de définir les forces thermodynamiques \({Y}_{ijkl}\) appelées taux de restitution d’énergie.
Une façon simple d’assurer le caractère positif de la dissipation quel que soit l’état du matériau et du chargement est de postuler le découplage des dissipations par déformations anélastiques et par endommagement, on doit alors vérifier séparément \({\phi }^{\text{an}}\ge 0\) et \({\phi }^{D}\ge 0\) soit encore:
En viscoélasticité, la condition de dissipation par déformation anélastique conduit à choisir, pour les lois de viscosité, des coefficients positifs.
En plasticité, on postule l’existence d’un pseudo potentiel de dissipation (\({\phi }^{\text{*}\text{an}}\) ). Ce dernier étant une fonction convexe positive dans l’espace des contraintes et nulle à l’origine, de telle sorte que la positivité de la dissipation soit automatiquement vérifiée. La loi d’écoulement des déformations anélastiques peut s’écrire sous la forme:
Où \(\dot{\lambda}\) est un scalaire positif appelé multiplicateur plastique. Ce dernier est calculé pour que l’augmentation de la déformation anélastique conduise à un relâchement des contraintes, ceci permettant de vérifier le critère de plasticité, lui aussi exprimé dans l’espace des contraintes.
Reste à vérifier la condition de positivité de la dissipation par endommagement. On peut pour cela s’inspirer du formalisme brièvement décrit précédemment pour la plasticité. C’est-à-dire se donner un pseudo potentiel de dissipation convexe et nul à l’origine dans l’espace des taux de restitution d’énergie d’où dérivent les incréments des composantes du tenseur d’endommagement. On a alors la loi d’évolution de l’endommagement suivante:
Le «multiplicateur d’endommagement» \(\dot{\lambda}\) devant être calculé de façon à vérifier le critère d’endommagement. La construction du pseudo potentiel étant ardue; l’utilisation d’un moyen plus rationnel, permettant d’assurer une forme du tenseur d’endommagement cohérente avec les phénomènes physiques à l’origine de l’endommagement, est régulièrement utilisé. Pour cela, on fait appel à la théorie de l’homogénéisation. Le tenseur d’endommagement \(D\) y est estimé à partir de la loi de comportement du matériau sain (\({R}^{0}\) ) et de celle d’un volume élémentaire représentatif (VER) de matériau fissuré (\({R}^{D}\) ), il vientalors:
La représentativité de la loi de comportement, du matériau équivalent endommagé dépendra de la qualité de l’homogénéisation du VER. Le caractère unilatéral du comportement du béton est induit par la restauration de raideur liée aux re-fermetures des fissures. Dans le cas d’un chargement uniaxial cyclique avec changement du signe de la contrainte, on peut constater expérimentalement la création de fissures de traction perpendiculaires à l’axe de chargement et de fissures de compression parallèles à l’axe de chargement. Les pertes de rigidité en traction et en compression sont donc attribuées à au moins deux réseaux orthogonaux de fissures. Lorsque la contrainte passe de la traction à la compression, les fissures de traction sont refermées et les fissures de compression sont activées. Lorsque la contrainte passe de la compression à la traction, les fissures de traction s’ouvrent et sont activées à leur tour.
Pour modéliser «physiquement» le comportement unilatéral du béton, il est commode de raisonner à partir d’une description tensorielle du réseau de fissures. Les pertes de rigidité en traction ou en compression peuvent ainsi être traitées dans chaque direction de l’espace en fonction du signe des contraintes et de l’orientation des fissures: si une contrainte principale est positive, les fissures les plus actives seront celles dont l’orientation est globalement perpendiculaire à la contrainte, alors que si la contrainte principale est négative, les fissures les plus actives seront parallèles à la contrainte.
Endommagement anisotrope par traction#
Les diverses raisons brièvement énoncées précédemment nous conduisent à proposer un modèle d’endommagement basé sur une représentation de la fissuration de traction par un tenseur du second ordre estimé à partir du tenseur des contraintes effectives de traction \({\tilde{\sigma}}^{t}\) et non sur les extensions. Il s’agit ici des contraintes effectives au sens de l’endommagement, elles ne doivent pas être confondues avec les contraintes effectives au sens de la mécanique des milieux poreux qui affectent tout le squelette solide alors que les contraintes effectives au sens de l’endommagement n’affectent que la partie non endommagée du squelette solide.
Le tenseur des contraintes effectives de traction s’obtient à partir des contraintes effectives principales, elles-mêmes issues de l’application du principe d’équivalence en déformation au modèle rhéologique utilisé pour le squelette solide:
Où \({\overrightarrow{e}}^{i}\) est le vecteur propre associé à \(\langle {\tilde{\sigma}}_{i}\rangle ` qui est la partie positive de la contrainte principale effective :math:`{\tilde{\sigma}}_{i}\) .
En utilisant le principe d’équivalence en déformation énoncé par Lemaitre [bib10], les contraintes effectives de traction permettent de définir le tenseur des déformations élastiques associées \({\varepsilon}^{\text{et}}\) :
Le critère de fissuration retenu pour l’endommagement de traction est celui de Rankine, le tenseur des contraintes seuils est noté \({\sigma}^{R}\) , le critère traduit dans chaque direction principale \({\overrightarrow{e}}^{i}\) du tenseur des contraintes effectives le non dépassement de la composante normale de la contrainte seuil:
L’actualisation du tenseur des contraintes seuils est conforme à la condition de consistance qui s’écrit simplement:
où les \({\sigma}_{ii}^{R}\) sont les termes de la diagonale du tenseur \({\sigma}^{R}\) exprimé dans la base principale des contraintes effectives.
En admettant que les fissures «équivalentes», et donc les endommagements ont les mêmes directions principales que les contraintes seuils, on peut définir le tenseur des endommagements dans la base des contraintes principales de \({\sigma}^{R}\) :
L’endommagement \({d}^{t}\) représente un ensemble de trois réseaux orthogonaux de fissures planes coexistants au sein d’un même volume élémentaire représentatif. Les termes \({\overrightarrow{v}}^{i}\) sont les vecteurs propres de \({\sigma}^{R}\) et \({d}_{i}^{t}\) les valeurs propres du tenseur d’endommagement estimées à partir des valeurs propres \({\sigma}_{i}^{R}\) de \({\sigma}^{R}\) , et de la loi d’évolution suivante inspirée de la loi de Weibull (Sellier [bib17]).
Lois d’évolution de l’endommagement :
\({d}_{i}^{t}=1-\exp\left(\underset{{\beta}_{i}}{\underset{\underbrace{}}{-\frac{1}{{m}^{t}}{\left(\frac{{\sigma}_{i}^{R}}{{\sigma}^{\text{ut}}}\right) }^{{m}^{t}}}}\right)\)
Dans cette expression \({m}^{t}\) est un paramètre d’autant plus grand que le matériau est fragile, \({\sigma}^{\mathit{ut}}\) est également un paramètre «matériau», il est assimilable à une cohésion, en pratique \({m}^{t}\) peut être identifié à partir de l’endommagement expérimental mesuré à partir du pic de la loi de comportement, \({\sigma}^{\mathit{ut}}\) est directement relié à la résistance. Nous donnerons les relations entre les paramètres du modèle et les grandeurs mesurables dans les paragraphes suivants. En introduisant l’indice de fissuration défini par:
Il vient la relation entre l’endommagement etl’indice de fissuration:
Cette dernière relation sera pratique pour la construction du potentiel d’énergie libre. Les variables internes introduites à ce niveau permettront aussi de mémoriser l’état de fissuration. Il est également nécessaire, dans cette optique, de noter que l’endommagement est une fonction croissante et continue de l’indice de fissuration qui est lui-même une fonction croissante de la contrainte seuil. Comme cette dernière ne peut qu’augmenter, les valeurs principales du tenseur d’endommagement ne peuvent que croître.
En ce qui concerne les relations déformations-contraintes normales, le passage du tenseur d’endommagement à la loi de comportement du matériau endommagé doit traduire d’une part une diminution du module d’Young dans la direction normale à la fissure et d’autre part une atténuation de l’effet de Poisson entre la direction orthogonale au plan de la fissure et les directions contenues dans son plan. Pour respecter ces conditions, nous proposons d’utiliser la loi de comportement suivante:
Soit encore en fonction des indices de fissuration:
Dans cette expression \({E}^{0}\) est le module d’Young du matériau sain et \({\nu}^{0}\) son coefficient de Poisson. La relation est écrite dans la base principale des endommagements. Il faut noter que cette loi est exprimée ici en fonction des contraintes apparentes et non des contraintes effectives, c’est cette écriture particulière qui permet de bénéficier simplement d’une atténuation de l’effet de Poisson en fonction de la fissuration dans les directions \(j\) et \(k\) ainsi que de la symétrie du tenseur de souplesse de la loi de comportement. Les relations glissements-contraintes de cisaillement sont également écrites dans la base principale d’endommagement, la relation proposée est la suivante:
Que l’on peut également exprimer en fonction des indices de fissuration:
La relation glissement-contrainte de cisaillement fait intervenir les endommagements sur les deux directions principales de fissuration sollicitées en cisaillement, la combinaison des endommagements est du type maillon le plus faible. Outre l’interaction entre endommagements que procure cette écriture, on peut lui attribuer un sens statistique en considérant que les endommagements sont assimilables à des probabilités de rencontrer des discontinuités surfaciques sur les facettes (Sellier [bib17]). Dans cette hypothèse, la théorie du maillon le plus faible indique que la probabilité pour qu’une contrainte de cisaillement transite sur deux facettes orthogonales est égale à la probabilité d’avoir simultanément deux surfaces orthogonales non rompues. En négligeant les dépendances statistiques entre les deux plans de fissuration, cette probabilité est égale au produit des probabilités d’avoir sur chacune de ces deux facettes une continuité du matériau, on en déduit le dénominateur de l’équation (4799). Enfin, la dernière raison pour laquelle nous avons adopté cette forme pour l’endommagement du coefficient de cisaillement est que la loi de comportement résultante présente la réponse attendue au test de rotation des directions principales (dit test de Willam [bib21]).
Pour exprimer le potentiel d’énergie libre en fonction des déformations élastiques, il est nécessaire de s’assurer de l’inversibilité des relations contraintes-déformations proposées précédemment. Pour cela, exprimons les contraintes normales apparentes en fonction des déformations élastiques:
avec
\({D}^{n}={e}^{{\beta}_{i}+{\beta}_{j}+{\beta}_{k}}-{\nu}^{{0}^{2}}\left({e}^{{\beta}_{i}}+{e}^{{\beta}_{j}}+{e}^{{\beta}_{k}}\right)-2{\nu}^{{0}^{3}}\)
On montre que \({D}^{n}\) est toujours positif si les deux conditions suivantes sont vérifiées:
La condition sur le coefficient de Poisson est vérifiée, il en est de même pour la condition sur les \({\beta}_{i}\) , compte tenu de la loi d’évolution des endommagements proposée précédemment. L’inversibilité de la relation déformation normale - contrainte normale est donc assurée quelque soit le niveau d’endommagement.
En ce qui concerne les relations entre les taux de cisaillement et les contraintes de cisaillement, l’inversion est immédiate et il vient:
Comme le dénominateur de cette expression est compris dans l’intervalle \([1,+\infty [\) l’inversibilité est là aussi assurée.
En intégrant les relations contraintes-déformations par rapport aux déformations élastiques associées aux contraintes effectives de traction, on obtient le potentiel d’énergie libre élastique associé aux contraintes effectives de traction. Ce potentiel noté \(\rho {\Psi}^{t}\) par la suite est ici exprimé dans la base principale des endommagements:
Avec \({\text{ρψ}}^{t(n)}\) le potentiel des énergies libres associé aux extensions:
Et \({\text{ρψ}}^{t(s)}\) celui associé aux déformations élastiques de cisaillement:
Le potentiel peut également s’exprimer simplement en fonction des contraintes apparentes \({\sigma}^{t}\) associées aux contraintes effectives de traction. Soit en ce qui concerne le potentiel associé aux extensions:
Les \({E}_{i}={E}^{0}(1-{d}_{i}^{t})\) étant les modules d’Young du matériau endommagé.Et pour le potentiel associé aux cisaillements:
Les indices de fissuration \({\beta}_{i}\) pouvant être reliés de façon bijective aux endommagements principaux de traction \({d}_{i}^{t}\) , l’expression de Clausius-Duhem peut s’exprimer en fonction des indices de fissuration. Pour plus de clarté nous faisons ici momentanément abstraction du rôle des déformations anélastiques, en supposant une transformation élastique endommageable ne faisant intervenir que les contraintes effectives de traction:
Dans cette expression, \({\epsilon}_{I}^{\text{et}}\) est une valeur principale du tenseur des déformations associées aux contraintes effectives de traction, \({\varphi}^{\text{Dt}(n)}\) est la dissipation associée aux déformations normales et \({\varphi}^{\text{Dt}(s)}\) celle associée aux cisaillements. \(R\) est la matrice de passage de la base principale des déformations élastiques à la base principale des endommagements, \(\dot{R}\) peut être interprété comme un taux de rotation du tenseur d’endommagement si les directions principales de déformation ne tournent pas. La prise en compte de la forme du potentiel d’énergie libre associé aux cisaillements permet alors de calculer la dissipation due à l’endommagement associé aux cisaillements. Il vient:
Cette expression est toujours positive puisque \({\dot{\beta}}_{i}\) est positif, la positivité de la dissipation associée aux cisaillements est donc vérifiée.
En ce qui concerne la dissipation associée aux déformations normales, on peut remarquer qu’en utilisant les expressions en contrainte de \({\psi}^{t(n)}\) et de \({\epsilon}^{\text{et}}\) dans l’équation de Clausius-Duhem, il vient:
Ce qui implique que \({\dot{E}}_{i}\le 0\) . Or \({\dot{E}}_{i}=-{E}^{0}{\dot{d}}_{i}^{t}\) et \({\dot{d}}_{i}^{t}\) étant positifs, le second principe est également vérifié pour l’endommagement associé aux déformations normales.
Dans le cas du chargement non radial, la relation de Clausius-Duhem contient les termes dus aux évolutions des endommagements principaux, qui sont toujours positifs comme nous venons de le voir, ainsi que des termes dus aux rotations des directions d’endommagement. Ces derniers traduisent un rapprochement des directions d’orthotropie du matériau et de celles du chargement. D’un point de vue analytique, cette seconde transformation est analogue à une rotation des directions principales de déformation sans endommagement. Elle se fait donc sans dissipation, la relation suivante doit donc être respectée à chaque instant:
Ce qui implique:
Or, par construction, \(\sigma =\rho \frac{\partial {\Psi}^{t}}{\partial {\epsilon}^{\text{et}}}\) , donc cette condition est identiquement respectée et la rotation des directions d’endommagement n’entraîne pas de dissipation complémentaire mais induit une variation du potentiel d’énergie libre compatible avec l’évolution du chargement.
Nous venons de présenter les principes d’un modèle d’endommagement orthotrope en contrainte effective, ce dernier entre dans le cadre thermodynamique et bénéficie en outre d’une méthode de résolution numérique directe conformément (pas de sous-itérations aux points de Gauss). En effet, le calcul de l’endommagement en fonction de la contrainte effective est direct, ainsi que celui de la contrainte apparente en fonction de la contrainte effective et de l’endommagement.
Endommagement isotrope par compression#
Sous sollicitation de traction, le critère habituellement utilisé est celui de Rankine (contrainte principale de traction), ce critère rend compte d’une propagation de fissures en mode \(I\) . En compression, les critères de Mazars [bib13] ou de Drücker-Prager sont couramment employés ; le critère de Mazars fait intervenir la notion d’extension du VER, le critère de Drücker-Prager rend compte de l’effet défavorable du déviateur des contraintes. En pratique, la rupture en compression est induite par les hétérogénéités élastiques conduisant à l’apparition de champs locaux de contraintes auto-équilibrées dont la partie positive entraîne l’amorçage et la propagation de fissures (figure Fig. 250). De par leurs origines, ces contraintes positives induites ne peuvent exister que dans les directions orthogonales aux contraintes de compression qui les génèrent. Lorsque ces auto-contraintes atteignent la résistance à la traction une fissure s’amorce et l’endommagement de compression apparaît. Dans les bétons ordinaires, cet endommagement apparaît de façon progressive et il est possible d’observer de multiples fissures verticales réparties sur une large bande de cisaillement localisée et inclinée (figure Fig. 251).

Fig. 250 Faciès de fissuration en fonction du chemin de chargement (Torrenti [bib19])#
Les fissures parallèles aux bords libres sont amorcées au voisinage des granulats par les autocontraintes induites, elles fissurent le béton formant de petites «colonnes» qui périssent par instabilité latérale comme le montre la figure Fig. 251.

Fig. 251 Apparition de « colonnes » au voisinage des granulats (Torrenti [bib19])#
Ainsi, la propagation des fissures de compression peut être assimilée à un phénomène d’instabilités multiples en compression le long d’une bande de cisaillement. Or les phénomènes d’instabilité mécanique sont très étroitement liés aux conditions de maintien latéral de l’élément comprimé. L’instabilité se produisant toujours dans la direction de plus faible maintien, ceci explique les fissures parallèles aux bords non chargés sur la figure Fig. 250.
Outre le mode de rupture décrit ci-dessus, il est important de rappeler combien la résistance à la compression est sensible au confinement comme le montrent les différents essais biaxiaux et triaxiaux de la littérature. Compte tenu d’une part de la complexité du mode de rupture en compression et d’autre part de la sensibilité au confinement, il est usuel pour modéliser l’endommagement du béton en compression d’adopter un critère macroscopique isotrope de Drücker-Prager si l’on raisonne en termes de contraintes, ou un critère de Mazars si l’on raisonne en terme de déformations. Nous avons choisi ici d’adopter le critère de Drücker-Prager pour être cohérent avec le formalisme en contraintes effectives introduit lors de la présentation du modèle d’endommagement de traction. Les contraintes à l’origine de l’endommagement de compression sont donc supposées être les contraintes effectives négatives \({\tilde{\sigma}}^{c}\) , ces dernières sont définies dans la base principale des contraintes effectives par:
Où \(\tilde{\sigma}\) est la contrainte effective issue du modèle rhéologique et \({\tilde{\sigma}}^{t}\) la contrainte effective de traction définie par l’équation (4852). La contrainte équivalente de Drücker-Prager s’écrit alors:
Où \({I}_{1}\) et \({J}_{2}\) sont les deux premiers invariants du tenseur des contraintes effectives de compression:
L’écoulement est réalisé en considérant que la contrainte seuil d’endommagement mémorise la valeur maximale de la contrainte de Drücker-Prager:
L’endommagement évolue alors non linéairement en fonction de la contrainte seuil:
Le potentiel d’énergie libre associé aux contraintes effectives de compression s’écrit très simplement du fait de l’hypothèse d’isotropie de l’endommagement de compression:
La dissipation associée à l’endommagement de compression s’écrit:
Le taux de restitution d’énergie \({Y}^{c}\) étant négatif et l’endommagement strictement croissant, la positivité de la dissipation par endommagement de compression est assurée.
Couplage des endommagements de traction et de compression#
Le caractère isotrope prédominant de l’endommagement de compression est lié à la complexité «quasi aléatoire et donc statistiquement isotrope» des chemins de fissuration générés pendant le processus de dégradation. Il est évident que les fissures créées vont affecter le comportement en traction. Une façon simple de rendre compte de la diminution des modules élastiques en traction en fonction de l’endommagement de compression est de considérer que l’endommagement isotrope de compression vient également réduire le potentiel d’énergie libre de traction qui devient:
Le terme \(\rho {\psi}^{t}\) étant positif, la positivité de la dissipation par endommagement de compression reste assurée:
Et le terme \((1-{d}^{c})\) étant lui aussi positif, la dissipation par endommagement de traction reste positive.
Potentiel d’énergie libre associé aux déformations élastiques macroscopiques
La partition des déformations en fonction du signe des contraintes effectives étant faite équations (4852) et (4853), le potentiel d’énergie libre est la somme des énergies libres associées aux contraintes effectives de traction d’une part et aux contraintes effectives de compression d’autre part:
Potentiel d’énergie libre associé à une réaction chimique interne expansive
Si le modèle intègre une pression (\({P}_{g}\) ) créée par la réaction chimique expansive d’avancement \(A\) , le potentiel d’énergie libre, à température imposée et à un instant donné, devient une fonction de \(A\) :
Dans cette expression \({V}^{\mathit{an}}\) représente les variables internes associées aux phénomènes anélastiques. L’inégalité de Clausius-Duhem devient donc:
Dans cette expression, le terme \({P}_{g}(\dot{A}{V}^{g})\) est la puissance mécanique apportée au squelette solide par la réaction chimique. Si l’on envisage une transformation physique du VER sans endommagement ni déformation anélastique, donc sans dissipation mécanique, cette énergie doit se retrouver intégralement dans le potentiel d’énergie libre, ce qui s’écrit:
D’autre part les considérations physiques nous conduisent à exprimer la pression de gel en fonction de la fraction volumique de matière en excès par rapport au volume des vides connecté au site réactif d’une part et des déformations totales d’autre part, équation (5001).
Le respect des deux précédentes relations conduit à proposer pour la part du potentiel due au gel la forme suivante:
Cette forme de potentiel est proche de celle proposée par Ulm et al [bib20]. La dérivée de ce potentiel par rapport aux déformations élastiques donne la part de la contrainte macroscopique induite par la pression interne de gel dans le squelette solide:
Potentiels d’énergie libre associés aux pressions hydriques#
En milieu saturé, les pressions intra poreuses agissent sur le squelette solide en déformant les parois du réseau poreux; l’équation de Clausius-Duhem s’écrit, en l’absence d’endommagement et de phénomènes anélastiques:
Dans cette expression \({\varphi}^{w}=\frac{{m}^{w}}{{\rho}^{\mathit{w0}}}\) est l’apport de masse d’eau normalisé, \({m}^{w}\) étant l’apport de masse et \({\rho}^{\mathit{w0}}\) la masse volumique de l’eau définie à la pression de référence \({P}_{\mathit{w0}}\) . Par ailleurs les considérations physiques conduisent à exprimer la pression d’eau sous la forme (Coussy [bib5]):
Une forme admissible pour le potentiel d’énergie libre associé à ces équations est alors:
La dérivée de ce potentiel par rapport aux déformations élastiques donne la part de la contrainte macroscopique induite par la pression de l’eau:
Si l’état de référence est défini pour le matériau saturé à la pression atmosphérique \(({P}_{\mathit{w0}}=0)\) , alors l’expression précédente n’est valable que si l’apport de masse fluide est positif. Dans le cas contraire, le béton se dé-sature et la pression hydrique n’est plus gérée par les compressibilités relatives des différentes phases mais par les phénomènes capillaires. La pression hydrique moyenne \({P}_{w}\) est donc une fonction de la pression capillaire et du degré de saturation \({S}^{w}\) . Outre la variation de pression dans l’eau induite par les phénomènes capillaires, il est également nécessaire de considérer l’action des interfaces du fluide avec le milieu gazeux et le solide. En effet, ces interfaces sont sujettes aux phénomènes de tension capillaire qui agissent elles-aussi directement sur le squelette solide. Dans le cas où la pression de gaz intra poreuse est en équilibre avec la pression atmosphérique (Coussy [bib5])_, la part de la contrainte macroscopique induite par ces deux phénomènes peut se mettre sous la forme générale suivante:
Où \({f}^{w}\) est une fonction prenant en compte d’une part la diminution du volume d’eau et d’autre part l’augmentation du nombre de sites solides soumis à la tension superficielle d’interface. Dans la présente modélisation, nous nous intéressons aux ouvrages situés en zone partiellement saturée, dans ce cas nous proposons d’utiliser une fonction \({f}^{w}\) linéaire de la forme \({k}^{w}\cdot {S}^{w}\) , la contribution des effets hydriques dans la contrainte macroscopique a alors la forme suivante:
En considérant que la variation de la porosité \(\varphi\) due à la déformation reste petite par rapport à \({\varphi}^{w}\) , on peut admettre que pour le milieu non saturé \(\varphi \approx {\varphi}^{0}\) . Si d’autre part, on admet que la courbe de pression capillaire \({P}^{c}({S}^{w})\) est quasiment insensible à l’état de déformation du squelette solide, alors:
Si la courbe de pression capillaire admet une équation de type «Van Genuchten» alors \({\pi}^{w}\) prend la forme suivante:
Où \(a\) et \(b\) sont deux constantes de calage.
Le potentiel d’énergie libre peut alors se mettre sous la forme:
La force thermodynamique associée à la variation de la masse d’eau s’obtient par dérivation de ce potentiel par rapport à \({\varphi}^{w}\) .
Dissipation due aux déformations anélastiques#
L’équation de Clausius-Duhem fait apparaître les déformations anélastiques \({\varepsilon}^{\text{an}}\) dans le terme \(\sigma :{\dot{\varepsilon}}^{\text{an}}\) . Il s’agit de la puissance des efforts extérieurs du champ de déformation anélastique, l’évolution de ces déformations induit une évolution des variables internes associées \({V}^{\mathit{an}}\) provoquant éventuellement une variation du potentiel d’énergie libre:
Ce dernier terme représente l’énergie élastique bloquée dans le squelette solide par la déformation anélastique. Dans notre modèle les déformations anélastiques ont une origine viscoélastique ou viscoplastique et peuvent directement être utilisées en tant que variables internesn, soit \({V}^{\text{an}}={\varepsilon}^{\text{an}}\) .
Ainsi, dans le cas particulier d’une transformation purement anélastique, la dissipation se résume à:
Dans le modèle proposé ici nous avons adopté le principe de partition de la déformation totale en partie élastique et partie anélastique, ce qui permet d’exprimer les déformations élastiques en fonction des déformations anélastiques et de conclure que la force thermodynamique associée à la déformation anélastique est la contrainte:
Le second principe est donc vérifié si \(\sigma :{\dot{\varepsilon}}^{\text{an}}\ge 0\) . Dans le modèle étudié ici, la déformation anélastique associée au fluage à long terme ou à la réaction chimique expansive est proportionnelle à la contrainte, ce que l’on peut écrire sous forme abrégée \({\dot{\varepsilon}}^{\text{an}}=k\sigma\) , où \(k\) est un coefficient positif dépendant des variables internes pour chaque composante du tenseur des déformations. Ainsi la dissipation anélastique due aux déformations à long terme est une dissipation visqueuse de la forme \(k{\sigma}^{2}\ge 0\) . Concernant la déformation de RAG, nous n’autorisons son évolution que si la dissipation calculée numériquement sur le pas de temps est effectivement positive.
Potentiel total d’énergie libre et lois d’état#
Le potentiel d’énergie libre du squelette solide est obtenu en sommant les contributions énergétiques des différents phénomènes étudiés précédemment:
Les lois d’état s’obtiennent par dérivation du potentiel total:
Si l’on exprime les contraintes dans la base principale des endommagements de traction, il vient pour les termes diagonaux du tenseur des contraintes:
et pour les termes hors diagonale:
Avec \({D}^{n}={e}^{{\beta}_{i}+{\beta}_{j}+{\beta}_{k}}-{\nu}^{{0}^{2}}({e}^{{\beta}_{i}}+{e}^{{\beta}_{j}}+{e}^{{\beta}_{k}}+2{\nu}^{0})\) et \({e}^{{\beta}_{i}}=\frac{1}{1-{d}_{i}^{t}}\)
Rappelons que les déformations élastiques de traction \({\varepsilon}^{\text{et}}\) et de compression \({\varepsilon}^{\text{ec}}\) résultent de deux décompositions successives, la partition de la déformation totale d’une part:
et d’autre part de la partition fonction du signe de la contrainte effective au sens de l’endommagement:
Et l’équation de la déformation thermique:
Dans l’équation (4454), \({\varepsilon}^{\text{th}}\) est la déformation due à la dilatation thermique définie classiquement par l’équation (4456) où \({\alpha}^{\theta}\) est le coefficient de dilatation thermique, \(T\) la température et \({T}_{0}\) la température de référence. Notons que dans l’équation (4454), une déformation de référence \({\varepsilon}^{0}\) est également présente, il s’agit d’une déformation de référence non nulle correspondant à un état libre de contrainte. Elle ne peut être associée qu’à une variation volumique du squelette solide d’origine chimique (retrait chimique liée de l’hydratation par exemple). En effet, les déformations de retrait hydrique ou de gonflement par produits expansifs internes sont des manifestations des pressions intra poreuses apparaissant via les déformations élastiques et anélastiques, elles ne doivent donc pas être confondues avec cette «déformation chimique imposéede référence» qui ne s’accompagne pas de pressions internes et ne peut donc pas créer d’endommagement en déformation libre.
Les déformations élastiques et anélastiques sont obtenues par résolution du système des équations rhéologiques présentées au chapitre précédent. Si la résolution du système d’équations du modèle rhéologique est directe (sans non linéarité nécessitant des sous itérations numériques au point de Gauss dans l’implémentation éléments finis), alors la résolution de l’ensemble du modèle est directe pour la donnée du champ de déformation totale. Rappelons que cet aspect du modèle répond à l’objectif de facilité d’implémentation et de réduction du temps de calcul que nous nous sommes initialement fixé. Le tableau ci-dessous récapitule les variables.
Variables d’état |
Variables associées |
|
Observables |
Internes |
|
\(\epsilon\) |
\(\sigma\) |
|
T |
s |
|
\({\epsilon}^{e}\) |
\(\sigma\) |
|
\({\epsilon}^{\mathit{an}}\) |
\(-\sigma\) |
|
\({d}^{t}\) |
\({Y}^{t}\) |
|
\({d}^{c}\) |
\({Y}^{c}\) |
|
\(A{V}_{g}\) |
\({P}_{g}\) |
|
\({\varphi}^{w}\) |
\({P}_{w}\) |
|
Couplage du modèle d’endommagement et du modèle rhéologique#
Le modèle rhéologique et le modèle d’endommagement ayant été décrits individuellement dans les précédents paragraphes, ils doivent maintenant être mis en relation. Comme nous l’avons mentionné dans le paragraphe précédent, les contraintes effectives et les déformations auxquelles il est fait référence dans le chapitre consacré au modèle d’endommagement sont issues du schéma rhéologique. Le couplage entre les phénomènes viscoélastiques et l’endommagement consiste donc à définir sur le schéma rhéologique les contraintes effectives et les déformations à utiliser pour calculer l’endommagement. Actuellement, les contraintes effectives utilisées dans le modèle d’endommagement sont directement issues du modèle rhéologique pour lequel l’intégration des équations (5011) et (5012) est réalisée avec les caractéristiques viscoélastiques du matériau sain. Le couplage entre l’endommagement et la rhéologie est donc immédiat. En effet, si l’endommagement augmente lors d’un essai de fluage, alors les contraintes effectives vont augmenter dans le modèle rhéologique, conduisant à un accroissement de la vitesse de fluage.
Description des variables internes#
Le tableau suivant donne la correspondance entre le numéro des variables internes accessibles par code_aster et leur description:
Contraintes seuils d’endommagement (1 à 7)
Tenseur des seuils d’endommagement en traction (6 composantes):
BR_SUT11 BR_SUT22 BR_SUT33 BR_SUT12 BR_SUT13 BR_SUT23
Seuil d’endommagement compression (1 scalaire)
BR_SIGDP
Déformations de fluage (8 à 14)
Tenseur déviatorique (6 composantes)
BR_EFU11 BR_EFU22 BR_EFU33 BR_EFU12 BR_EFU13 BR_EFU23
Partie sphérique (1 scalaire)
BR_EFUSP
Déformations de fluage interne (15 à 21)
Tenseur déviatorique (6 composantes)
BR_EP111 BR_EP122 BR_EP133 BR_EP112 BR_EP113 BR_EP123
Partie sphérique(1 scalaire)
BR_EP1SP
Avancement chimique (22)
BR_AVCHI
Endommagement viscoplastique de la RAG (23 à 25)
BR_DVRAG1 BR_DVRAG2 BR_DVRAG3
Déformations viscoplastiques dues à la RAG (26 à 31)
BR_EPV11 BR_EPV22 BR_EPV33 BR_EPV12 BR_EPV13 BR_EPV23
Pression du gel (32)
BR_PRGEL
Étude réalisée (33 : phénomène pris en compte)
BR_ETUDE
Bibliographie#
Acker, F.J. Ulm, «Creep and shrinkage of concrete: physical origins and practical measurements», Nuclear Engineering ans Desigan 203 (2001), 143-158.
Acker, «Sur les origines du retrait et du fluage du béton», Revue française de génie civil, volume 7, n°6, pages 761-776, 2003.
Bernard, J.F. Ulm, J.T. Germaine, «Volume and deviator creep of calcium leavhed cement based materials», Cement and Concrete Research 33 (2003) 1127-1136.
Capra, «Modélisation des effets mécaniques induits par les réactions alcali-granulats », Thèse de doctorat de l’Ecole Normale supérieure de Cachan, 1997.
Grimal, A. Sellier, I. Petre-Lazar, Y. Le Pape, E. Bourdarot,«Influence of basic creep on the modelling of structures subjected to alkali aggregate reaction », CONCREEP 7, Nantes, France, pp. 235-242, 2005.
Grimal, A. Sellier, I. Petre-Lazar, Y. Le Pape, E. Bourdarot,«A Numerical Model to Simulate Alkali-Aggregate Reaction Degradation », 7th CANMET/ACI International Conference, Montreal, Canada, SP-234-12, pp. 179-190, 2006.
Grimal, «Caractérisation des effets du gonflement provoqué par la réaction alcali-silice sur le comportement mécanique d’une structure en béton», thése de doctorat de l’université Paul Sabatier, Février 2007.
Larive, «Apports combinés de l’expérimentation et de la modélisation à la compréhension de l’alcali-réaction et de ses effets mécaniques», Thèse de doctorat de l’Ecole Nationale des Ponts et Chaussées, 1997.
Lemaitre, J.L. Chaboche, «Mécanique des matériaux solides», 2ème édition, Dunod, 2001.
Lemarchand, L. Dormieux, F.-J. Ulm, «Elements of micromechanics of ASR induced swelling in concrete structures», Concrete science and engineering, Vol. 4 – No. 13, pp. 12-22, March 2002.
Lombardi, P. Massard, A. Perruchot, «Mesure expérimentale de la cinétique de formation d’un gel silicocalcique, produit de la réaction alcalis-silice», journée scientifique AFGC-DRAST sur l’alcali-réaction, 21 octobre 1999.
Mazars , G. Pijaudier-Cabot, «Damage localization analysed as a crack propagation». In Bazant Z. P., Bittnar Z., Jirasek M., Mazars J. Eds. Proc US-Europe Workshop Fracture and Damage in Quasibrittle Struc., Prague: E & FN SPON, p145-157, 1994.
Multon, «Evaluation expérimentale et théorique des effets mécaniques de l’alcali réaction sur des structures modèles», thése de doctorat de l’université de marne la vallée, Décembre 2003.
Multon, F. Toutlemonde, «Effect of Applied Stresses on Alkali-Silica Reaction Induced Expansions », Cement and Concrete Research, Vol. 36, n°5, pp. 912-920, 2006.
Poyet, « Etude de la dégradation des ouvrages en béton atteints par la réaction alcali silice: Approche expérimentale et modélisation numérique multi-échelles des dégradations dans un environnement hydro-chemo-mécanique variable», thèse de doctorat de l’université de Marne la Vallée, Décembre 2003.
Sellier, «Modélisations probabilistes du comportement de matériaux et de structures en génie civil», Thèse de doctorat de l’Ecole Normale Supérieure de Cachan, décembre 1995.
Sellier, B. Capra, «Modélisation de la dégradation des bétons soumis aux Réactions Alcali-Granulats», contrat EDF, janvier 1999.
J.M. Torrenti, «Comportement multiaxial du béton: aspects expérimentaux et modélisation», Thèse de doctorat de l’ENPC, 310 p., 1987.
F.-J. Ulm, M. Peterson, E. Lemarchand, «Is ASR-expansion caused by chemoporoplastic dilatation», Concrete Science and Engineering, Vol. 4, pp. 47-55, March 2002.
Willam, E. Pramono, S. Sture, «Fundamental issues of smeared crack models», Proc. Of the SEM-RILEM Int. conf. On fracture of concrete and rock, Shah S.P., Swartz S.E. (eds), Society of Engineering Mechanics, p. 192-207, 1987.
Fonctionnalités et vérification#
La loi de comportement BETON_RAG (mot clé COMPORTEMENT de STAT_NON_LINE) et son matériau associé (commande DEFI_MATERIAU) est vérifiée par les tests suivants:
cOMP003 |
Test de comportements spécifiques aux bétons. Simulation sur un point matériel. Tests avec \(\mathit{Pa}\) et \(\mathit{MPa}\) et rotation des axes. |
|
SSNV400A |
Essai de traction en déformation imposée, sur un cube libre de se déformer dans la direction perpendiculaire au chargement. |
|
SSNV400B |
Essai de compression en déformation imposée, sur un cube libre de se déformer dans la direction perpendiculaire au chargement. |
|
SSNV400D |
Essai de traction en déformation imposée, sur un cube confiné (déformations transversales bloquées) |
|
SSNV400E |
Essai de compression en déformation imposée sur un cube confiné (déformations transversales bloquées) |
|
SSNV401A |
Essai de fluage en compression avec une contrainte imposée sur un cube libre de se déformer dans la direction perpendiculaire au chargement |
|
SSNV401B |
Essai de fluage en compression avec une déformation imposée sur un cube libre de se déformer dans la direction perpendiculaire au chargement. |
|
SSNV401D |
Essai de fluage en compression avec une contrainte imposée sur un cube confiné (déformations transversales bloquées). |
|
SSNV401E |
Essai de fluage en compression avec une déformation imposée sur un cube confiné (déformations transversales bloquées). |