r7.01.24 Loi de comportement viscoplastique LETK#
Résumé:
La loi L&K décrit un comportement élasto-visco-plastique des roches. L’élastoplasticité se caractérise par un écrouissage positif en pré-pic et un comportement adoucissant au delà du de résistance. La viscoplasticité traduit l’effet du temps sur le comportement. Elle est décrite par une loi en puissance de Perzyna.
L’initiation des phénomènes élastoplastique ou viscoplastique se déclenche dès le franchissement du seuil correspondant. Le comportement lié à chaque phase est décrit par l’évolution de ces différents seuils. Cette évolution est régie par des fonctions d’écrouissage plastique ou viscoplastique.
Pour le mécanisme élastoplastique, une surface de charge évolue à travers différents seuils:
Un seuil d’endommagement confondu avec le seuil de viscosité initiale,
Un seuil macroscopique de pic, défini à partir des essais de laboratoire,
Un seuil intermédiaire, qualifié de limite de clivage, déterminé analytiquement,
Un seuil caractéristique défini comme l’enveloppe du seuil d’endommagement et de la limite de clivage, appelé également limite de contractance/dilatance (cette limite est confondue avec le seuil de viscoplasticité maximale),
Un seuil de résistance résiduelle.
Pour le mécanisme visqueux, une surface viscoplastique évolue à travers:
Un seuil initial confondu avec le seuil d’endommagement
Un seuil de viscosité maximal considéré confondu avec la limite de contractane/dilatance
Introduction#
Ce document présente le modèle rhéologique L&K développé au CIH par F. Laigle et A. Kleine. C’est un modèle élasto-visco-plastique dédié aux roches. La spécificité de l’élastoplasticité réside en la modélisation d’un comportement non-linéaire en phase pré-pic et d’un comportement post pic radoucissant. La viscosité caractérise l’effet du temps sur le comportement de la roche. L’initiation de chacun de ces phénomènes se déclenche dès le franchissement d’un seuil. Le comportement lié à chaque phase est décrit par l’évolution de ces différents seuils régie par des fonctions d’écrouissage plastique ou viscoplastique.
Équations du modèle L&K#
Simplification du modèle#
Afin de décrire au mieux et d’une façon concise cette version du modèle, il est nécessaire de donner un aperçu sur le modèle original. La différence entre les deux versions sera mieux perçue.
Bref aperçu sur les seuils du modèle original#
Dans la version originale du modèle L&K tel qu’il est développé sous le logiciel Flac au CIH (cf. ) ou la thèse de A. Kleine (cf. R 4 ), il existe trois mécanismes distincts:
Un mécanisme élastoplastique pré-pic, régi par un écrouissage positif,
Un mécanisme viscoplastique régi également par un écrouissage positif,
Un mécanisme élastoplastique post pic régi par un écrouissage négatif décrivant la fracturation.
La particularité de ce modèle original réside dans le fait que le couplage des deux mécanismes pré pic déclenche la fracturation donc le mécanisme post-pic. En effet, les fissures d’extension induisent une dégradation des propriétés mécaniques des matériaux avec l’accroissement de la dilatance.
Pour le mécanisme élastoplastique, une surface de charge évolue à travers différents seuils. Pour le mécanisme visqueux, une surface viscoplastique évolue d’un seuil initial à un seuil final.
Les différents seuils délimitent des domaines associés à des mécanismes physiques particuliers:
Un seuil d’endommagement confondu avec le seuil de viscosité initiale,
Un seuil intermédiaire, qualifié de limite de clivage,
Un seuil caractéristique défini comme l’enveloppe du seuil d’endommagement et de la limite de clivage, appelé également limite de contractance/dilatance (cette limite est confondue avec le seuil de viscoplasticité maximale),
Un seuil macroscopique de pic, défini à partir des essais de laboratoire,
Un seuil intrinsèque purement conceptuel défini comme extrapolation du seuil de pic, (ce seuil est éliminé dans la version simplifiée du modèle),
Un seuil de résistance résiduelle.

Figure 3.1.1-a *. Seuils du modèle original présentés dans le plan* \(({\sigma}_{\min},{\sigma}_{\max})\)
Caractéristiques du modèle simplifié#
La version simplifiée proposée par le CIH (cf. R 2 ) repose seulement sur deux mécanismes: un mécanisme élastoplastique et un mécanisme viscoplastique.
Le seuil intrinsèque est éliminé dans cette version.
Le seuil caractéristique délimitant les domaines de contractance et de dilatance en phase pré-pic, est linéarisé pour éviter tout problème numérique. Il est supposé confondu avec le seuil de viscosité maximale.

Figure 3.1.2-a *. Seuils du modèle simplifié dans le plan* \(({\sigma}_{\min},{\sigma}_{\max})\)
Descriptif des mécanismes#
Le mécanisme viscoplastique#
Ce mécanisme s’active dès que le point de charge dépasse le seuil viscoélastique initial (assimilé à la limite d’élasticité initiale). Des déformations irréversibles sont générées. Ces vitesses de déformations irréversibles sont proportionnelles à la distance du point de charge par rapport au seuil de viscosité. La surface associée au mécanisme viscoplastique évolue de la limite d’élasticité initiale vers le seuil viscoplastique maximal en fonction des déformations irréversibles générées.
Le mécanisme élastoplastique#
pré pic#
Le mécanisme élasto plastique s’active en même temps que le mécanisme viscoplastique. Dès que le point de charge dépasse la limite d’élasticité initiale, la surface de charge commence à s’écrouire positivement.
post pic#
Dans la version simplifiée du modèle, ce mécanisme est régi par:
un écrouissage négatif du seuil de pic vers le seuil intermédiaire,
un écrouissage négatif du seuil intermédiaire vers le seuil résiduel.
Le comportement volumique#
Le comportement volumique, durant la phase pré-pic, peut être contractant ou dilatant.
En dessous de la limite d’élasticité initiale, le comportement est contractant.
En dessous de la limite contractance/dilatance , le comportement volumique est contractant plastique.
Au delà de cette limite, le comportement volumique est dilatant.
N.B: Dans la version simplifiée du modèle, la limite contractance/dilatance est confondue avec le seuil viscoplastique maximal.
Décomposition du tenseur de déformation#
La décomposition de l’incrément de déformation totale s’écrit:
\(\underline{\underline{\dot{\varepsilon}}}={\underline{\underline{\dot{\varepsilon}}}}^{e}+{\underline{\underline{\dot{\varepsilon}}}}^{p}+{\underline{\underline{\dot{\varepsilon}}}}^{\text{vp}}\)
où \({\underline{\underline{\dot{\varepsilon}}}}^{e}\) , \({\underline{\underline{\dot{\varepsilon}}}}^{p}\) et \({\underline{\underline{\dot{\varepsilon}}}}^{\text{vp}}\) sont les incréments des tenseurs élastiques, irréversibles instantanés (plastique) et irréversibles différées (viscoplastiques).
L’hypo-élasticité#
La loi élastique choisie est une loi hypo-élastique:
\({\dot{\varepsilon}}_{ij}^{e}=\frac{1+\nu }{E}{\dot{\sigma}}_{ij}-\frac{3\nu }{E}\dot{p}{\delta}_{ij}\) ou \({\dot{\varepsilon}}_{ij}^{e}=\frac{1}{\mathrm{2G}}{\dot{s}}_{ij}+\frac{1}{\mathrm{3K}}\dot{p}{\delta}_{ij}\)
que l’on note aussi: \({\dot{\sigma}}_{ij}={D}^{e}{\dot{\varepsilon}}_{ij}^{e}\) .
Les modules de cisaillement \(G\) et de compressibilité \(K\) dépendent de l’état de contraintes: \(K={K}_{0}^{e}{\left[\frac{{I}_{1}^{-}}{{\mathrm{3P}}_{a}}\right]}^{{n}_{\text{elas}}}\) et \(G={G}_{0}^{e}{\left[\frac{{I}_{1}^{-}}{{\mathrm{3P}}_{a}}\right]}^{{n}_{\text{elas}}}\) avec \({I}_{1}^{-}=\text{tr}({\sigma}^{-})\) .
\({I}_{1}^{-}=\text{tr}({\sigma}^{-})\) étant la trace des contraintes à l’instant \(-\) .
La plasticité#
Comme dans la version simplifiée du modèle, seul le mécanisme déviatorique est pris en compte, la déformation irréversible instantanée s’écrit:
\({\dot{\varepsilon}}_{ij}^{p}=\dot{\lambda}{G}_{ij}\)
\(\lambda\) étant le multiplicateur plastique et \(G\) est la fonction d’écoulement.
Soit \({f}^{d}\) le critère de plasticité:
Si \({f}^{d}\le 0\) alors \(\lambda =0\)
Si \({f}^{d}=0\) alors \(\lambda >0\)
L’expression de \(G\) repose sur plusieurs travaux cités dans la note R 2 et est de la forme:
\({G}_{ij}=\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}-(\frac{\partial {f}^{d}}{\partial {\sigma}_{kl}}{n}_{kl}){n}_{ij}\) , \({n}_{ij}=\frac{{\beta}^{'}\frac{{s}_{ij}}{{s}_{\text{II}}}-{\delta}_{ij}}{\sqrt{{\beta}^{'2}+3}}\) , \({\beta}^{'}=-\frac{2\sqrt{6}\sin(\Psi )}{3-\sin(\Psi )}\)
Les expressions de \(\sin(\Psi )\) sont détaillées au paragraphe 3.6.1 et 3.6.2 .
Le calcul de \(\dot{\lambda}\) fait l’objet du paragraphe 4.2.1.2 .
Le calcul de \(\frac{\partial f}{\partial {\sigma}_{ij}}\) est détaillé au paragraphe 3.7.1
L’évolution de l’élastoplasticité induit une déformation plastique: \({\epsilon}_{p}\) reliée à travers sa composante déviatorique \({\tilde{\varepsilon}}_{p}\) au paramètre d’écrouissage \({\gamma}_{p}\) tel que: \({\gamma}_{p}=\int\sqrt{\frac{2}{3}{\tilde{\dot{\varepsilon}}}_{p}{\tilde{\dot{\varepsilon}}}_{p}}\text{dt}\)
d’où la relation \({\dot{\gamma}}_{p}=\dot{\lambda}\sqrt{\frac{2}{3}{\tilde{G}}_{ij}{\tilde{G}}_{ij}}=\dot{\lambda}\sqrt{\frac{2}{3}}{G}_{\text{II}}\)
La viscoplasticité#
Le calcul des déformations irréversibles différées \({\underline{\underline{\dot{\varepsilon}}}}^{\text{vp}}\) repose sur la théorie de Perzyna.
\({\underline{\underline{\dot{\epsilon}}}}^{\text{vp}}=\langle \Phi ({f}^{\text{vp}})\rangle {G}_{ij}^{\text{visc}}\) où \(\Phi ({f}^{\text{vp}})\) et \({G}^{\text{visc}}\) caractérisent l’amplitude et la direction de la vitesse des déformations irréversibles :
\(\Phi ({f}^{\text{vp}})={A}_{v}{(\frac{{f}^{\text{vp}}}{\text{Pa}})}^{{n}_{v}}\) et \({G}_{ij}^{\text{visc}}=\frac{\partial {f}^{\text{vp}}}{\partial {\sigma}_{ij}}-(\frac{\partial {f}^{\text{vp}}}{\partial {\sigma}_{kl}}{n}_{kl}){n}_{ij}\)
\({f}^{\text{vp}}\) étant le critère de viscoplasticité, \({A}_{v}\) et \({n}_{v}\) sont des paramètres du modèle. \({P}_{a}\) est la pression atmosphérique.
L’évolution de la viscoplasticité induit une déformation visqueuse: reliée à travers sa composante déviatorique \({\tilde{\epsilon}}_{\text{vp}}\) au paramètre d’écrouissage \({\gamma}_{\text{vp}}\) tel que: \({\gamma}_{\text{vp}}=\int\sqrt{\frac{2}{3}{\tilde{\dot{\epsilon}}}_{\text{vp}}{\tilde{\dot{\epsilon}}}_{\text{vp}}}\text{dt}\) .
Remarque:
Soit \({S}^{\text{vp}}\) la surface définie dans l’espace des contraintes par: \({S}^{\text{vp}}=\left\lbrace \sigma ,{f}^{\text{vp}}(\sigma ,{\xi}^{\text{vp}})=0\right\rbrace\)
La vitesse de fluage pour un état de contraintes \(\sigma\) est proportionnelle à la distance de \(\sigma\) à \({S}^{\text{vp}}\) . Soit \({P}_{\sigma}^{\text{vp}}\) la projection de \(\sigma\) sur \({S}^{\text{vp}}\) et \(d=\parallel \sigma -{P}_{\sigma}^{\text{vp}}\parallel\) .
On peut aussi écrire \(d=\parallel \frac{\partial {f}^{\text{vp}}}{\partial \sigma }({P}_{\sigma}^{\text{vp}})\parallel C\) . \(C\) étant une constante qui dépend des paramètres visqueux. En première approximation, on écrit: \(d=\parallel \frac{\partial {f}^{\text{vp}}}{\partial \sigma }(\sigma )\parallel C\) . Mais cette approximation pose un problème dans la mesure où la fonction \({f}^{\text{vp}}\) peut ne pas être définie pour la valeur \(\sigma\) alors qu’elle l’est pour \({P}_{\sigma}^{\text{vp}}\) . Pour l’instant, dans Code_Aster on ne calcule pas cette distance. Si la situation se présente, un message d’alarme prévient l’utilisateur.
Expressions des critères#
Les expressions des deux critères viscoplastique \({f}^{\text{vp}}\) et élastoplastique \({f}^{d}\) dépendent des contraintes et des fonctions d’écrouissage. Dans ces expressions, on trouve \({I}_{1}\) le premier invariant des contraintes et \({s}_{\text{II}}\) le deuxième invariant du tenseur des contraintes déviatoires. Dans les deux critères, les mêmes définitions sont adoptées pour:
\(H(\theta )=\frac{{H}_{0}^{c}+{H}_{0}^{e}}{2}+(\frac{{H}_{0}^{c}-{H}_{0}^{e}}{2})(\frac{\mathrm{2h}(\theta )-({h}_{0}^{c}+{h}_{0}^{e})}{{h}_{0}^{c}-{h}_{0}^{e}})\)
\(h(\theta )={(1-\gamma \cos\mathrm{3\theta })}^{\frac{1}{6}}\) , \({h}_{0}^{c}={H}_{0}^{c}=h({0}^{°})={(1-\gamma )}^{\frac{1}{6}}\) , \({h}_{0}^{e}=h({60}^{°})={(1+\gamma )}^{\frac{1}{6}}\) ,
\({H}_{0}^{e}\) est un paramètre du modèle. \(\theta\) est l’angle de Lode.
Le critère viscoplastique \({f}^{\text{vp}}\)#
\({f}^{\text{vp}}(\sigma )={s}_{\text{II}}H(\theta )-{\sigma}_{c}{H}_{0}^{c}{\left[{A}^{\text{vp}}({\xi}_{\text{vp}}){s}_{\text{II}}H(\theta )+{B}^{\text{vp}}({\xi}_{\text{vp}}){I}_{1}+{D}^{\text{vp}}({\xi}_{\text{vp}})\right]}^{{a}^{\text{vp}}({\xi}_{\text{vp}})}\)
avec \({A}^{\text{vp}}({\xi}_{\text{vp}})=-\frac{{m}^{\text{vp}}({\xi}_{\text{vp}}){k}^{\text{vp}}({\xi}_{\text{vp}})}{\sqrt{6}{\sigma}_{c}{h}_{c}^{0}}\) , \({B}^{\text{vp}}({\xi}_{\text{vp}})=\frac{{m}^{\text{vp}}({\xi}_{\text{vp}}){k}^{\text{vp}}({\xi}_{\text{vp}})}{{\mathrm{3\sigma }}_{c}}\) , \({D}^{\text{vp}}({\xi}_{\text{vp}})={s}^{\text{vp}}({\xi}_{\text{vp}}){k}^{\text{vp}}({\xi}_{\text{vp}})\) , \({k}^{\text{vp}}({\xi}_{\text{vp}})={(\frac{2}{3})}^{\frac{1}{{\mathrm{2a}}^{\text{vp}}({\xi}_{\text{vp}})}}\)
Les fonctions d’écrouissage \({A}^{\text{vp}}({\xi}_{\text{vp}})\) , \({B}^{\text{vp}}({\xi}_{\text{vp}})\) et \({D}^{\text{vp}}({\xi}_{\text{vp}})\) dépendent des paramètres d’écrouissage \({a}^{\text{vp}}({\xi}_{\text{vp}})\) , \({m}^{\text{vp}}({\xi}_{\text{vp}})\) et \({s}^{\text{vp}}({\xi}_{\text{vp}})\) dont les expressions évoluent avec les variables d’écrouissage \({\xi}_{\text{vp}}\) (voir § 3.5 ). Quand \({\xi}_{\text{vp}}\) atteint certaines valeurs particulières, la surface \({f}^{\text{vp}}\) atteint les seuils correspondants.
Etant donné que le seuil viscoplastique ne s’écrouit que par la viscosité, on a toujours \({\dot{\xi}}_{\text{vp}}=\text{Min}\left[{\dot{\gamma}}_{\text{vp}},{\xi}_{v-\max}-{\xi}_{\text{vp}}\right]\) . \({\xi}_{\text{vp}-\max}\) correspond au critère viscoplastique maximal et est un paramètre du modèle
Le critère élastoplastique \({f}^{d}\)#
\({f}^{d}(\sigma )={s}_{\text{II}}H(\theta )-{\sigma}_{c}{H}_{0}^{c}{\left[{A}^{d}({\xi}_{p}){s}_{\text{II}}H(\theta )+{B}^{d}({\xi}_{p}){I}_{1}+{D}^{d}({\xi}_{p})\right]}^{{a}^{d}({\xi}_{p})}\)
avec \({A}^{d}({\xi}_{p})=-\frac{{m}^{d}({\xi}_{p}){k}^{d}({\xi}_{p})}{\sqrt{6}{\sigma}_{c}{h}_{c}^{0}}\) , \({B}^{d}({\xi}_{p})=\frac{{m}^{d}({\xi}_{p}){k}^{d}({\xi}_{p})}{{\mathrm{3\sigma }}_{c}}\) , \({D}^{d}({\xi}_{p})={s}^{d}({\xi}_{p}){k}^{d}({\xi}_{p})\) , \({k}^{d}({\xi}_{p})={(\frac{2}{3})}^{\frac{1}{{\mathrm{2a}}^{d}({\xi}_{p})}}\)
Les fonctions d’écrouissage \({A}^{d}({\xi}_{p})\) , \({B}^{d}({\xi}_{p})\) et \({D}^{d}({\xi}_{p})\) dépendent des paramètres d’écrouissage \({a}^{d}({\xi}_{p})\) , \({m}^{d}({\xi}_{p})\) et \({s}^{d}({\xi}_{p})\) dont les expressions évoluent avec les variables d’écrouissage \({\xi}_{p}\) (voir § 3.5 ). Quand \({\xi}_{p}\) atteint certaines valeurs particulières, la surface \({f}^{d}\) atteint les seuils correspondants.
L’écrouissage élastoplastique dépend de la position du point de charge par rapport à la limite contractance/dilatance:
si le point de charge est en dessous de cette limite, \({\dot{\xi}}_{p}={\dot{\gamma}}_{p}\) ,
si le point de charge est au dessus de cette limite, \({\dot{\xi}}_{p}={\dot{\gamma}}_{p}+{\dot{\gamma}}_{\text{vp}}\) .
Fonctions d’écrouissage#
Fonctions d’écrouissage du critère visqueux#
Le critère viscoplastique est régi par les fonctions d’écrouissage suivantes:
\(a({\xi}_{\text{vp}})={a}_{0}+({a}_{v-\max}-{a}_{0})\frac{{\xi}_{\text{vp}}}{{\xi}_{v-\max}}\) avec \({a}_{v-\max}=1.\)
\(m({\xi}_{\text{vp}})={m}_{0}+({m}_{v-\max}-{m}_{0})\frac{{\xi}_{\text{vp}}}{{\xi}_{v-\max}}\)
\(s({\xi}_{\text{vp}})={s}_{0}+({s}_{v-\max}-{s}_{0})\frac{{\xi}_{\text{vp}}}{{\xi}_{v-\max}}\) avec \({s}_{v-\max}={s}_{0}\)
Fonctions d’écrouissage du critère élastoplastique et leur dérivées#
Les expressions des fonctions d’écrouissage qui régissent le critère élastoplastique varient selon la valeur du paramètres \({\xi}_{p}\) :
Evolution entre le seuil d’endommagement et le seuil de pic : Si \(0\le {\xi}_{p}<{\xi}_{\text{pic}}\)
\(a({\xi}_{p})={a}_{0}+\ln(1+\frac{{\xi}_{p}}{{x}_{\text{ams}}{\xi}_{\text{pic}}})(\frac{{a}_{\text{pic}}-{a}_{0}}{\ln(1+1/{x}_{\text{ams}})})\) \(\frac{\partial a}{\partial {\xi}_{p}}=(\frac{{a}_{\text{pic}}-{a}_{0}}{\ln(1+1/{x}_{\text{ams}})})(\frac{1}{{\xi}_{p}+{x}_{\text{ams}}{\xi}_{\text{pic}}})\)
\(m({\xi}_{p})={m}_{0}+\ln(1+\frac{{\xi}_{p}}{{x}_{\text{ams}}{\xi}_{\text{pic}}})(\frac{{m}_{\text{pic}}-{m}_{0}}{\ln(1+1/{x}_{\text{ams}})})\) \(\frac{\partial m}{\partial {\xi}_{p}}=(\frac{{m}_{\text{pic}}-{m}_{0}}{\ln(1+1/{x}_{\text{ams}})})(\frac{1}{{\xi}_{p}+{x}_{\text{ams}}{\xi}_{\text{pic}}})\)
\(s({\xi}_{p})={s}_{0}+\ln(1+\frac{{\xi}_{p}}{{x}_{\text{ams}}{\xi}_{\text{pic}}})(\frac{{s}_{\text{pic}}-{s}_{0}}{\ln(1+1/{x}_{\text{ams}})})\) \(\frac{\partial s}{\partial {\xi}_{p}}=(\frac{{s}_{\text{pic}}-{s}_{0}}{\ln(1+1/{x}_{\text{ams}})})(\frac{1}{{\xi}_{p}+{x}_{\text{ams}}{\xi}_{\text{pic}}})\)
avec \({s}_{\text{pic}}=1.\)
Évolution entre le seuil de pic et le seuil intermédiaire ou la limite de clivage: Si \({\xi}_{\text{pic}}\le {\xi}_{p}<{\xi}_{e}\)
\(a({\xi}_{p})={a}_{\text{pic}}+({a}_{e}-{a}_{\text{pic}})(\frac{{\xi}_{p}-{\xi}_{\text{pic}}}{{\xi}_{e}-{\xi}_{\text{pic}}})\) \(\frac{\partial a}{\partial {\xi}_{p}}=\frac{{a}_{e}-{a}_{\text{pic}}}{{\xi}_{e}-{\xi}_{\text{pic}}}\)
\(s({\xi}_{p})=1-(\frac{{\xi}_{p}-{\xi}_{\text{pic}}}{{\xi}_{e}-{\xi}_{\text{pic}}})\) \(\frac{\partial s}{\partial {\xi}_{p}}=\frac{-1}{{\xi}_{e}-{\xi}_{\text{pic}}}\)
\(\frac{\partial m}{\partial {\xi}_{p}}=\frac{\partial m}{\partial a}\frac{\partial a}{\partial {\xi}_{p}}+\frac{\partial m}{\partial s}\frac{\partial s}{\partial {\xi}_{p}}\)
\(\frac{\partial m}{\partial {\xi}_{p}}=\frac{{\sigma}_{c}}{{\sigma}_{\text{po}int1}}\left[(-\frac{{a}_{\text{pic}}}{a{({\xi}_{p})}^{2}}){({m}_{\text{pic}}\frac{{\sigma}_{\text{po}int1}}{{\sigma}_{c}}+{s}_{\text{pic}})}^{\frac{{a}_{\text{pic}}}{a({\xi}_{p})}}\ln({m}_{\text{pic}}\frac{{\sigma}_{\text{po}int1}}{{\sigma}_{c}}+{s}_{\text{pic}})\frac{\partial a}{\partial {\xi}_{p}}-\frac{\partial s}{\partial {\xi}_{p}}\right]\)
Évolution entre le seuil intermédiaire et le seuil résiduel : Si \({\xi}_{e}\le {\xi}_{p}<{\xi}_{\text{ult}}\)
\(a({\xi}_{p})={a}_{e}+\ln(1+\frac{1}{\eta}\frac{{\xi}_{p}-{\xi}_{e}}{{\xi}_{\text{ult}}-{\xi}_{e}})(\frac{{a}_{\text{ult}}-{a}_{e}}{\ln(1+1/\eta )})\) \(\frac{\partial a}{\partial {\xi}_{p}}=(\frac{{a}_{\text{ult}}-{a}_{e}}{\ln(1+1/\eta )})(\frac{1}{{\xi}_{p}+{\text{ηξ}}_{\text{ult}}-(1+\eta ){\xi}_{e}})\)
\(s({\xi}_{p})=0\) \(\frac{\partial s}{\partial {\xi}^{p}}=0\)
\(m({\xi}_{p})=\frac{{\sigma}_{c}}{{\sigma}_{\text{po}int2}}{({m}_{e}\frac{{\sigma}_{\text{po}int2}}{{\sigma}_{c}})}^{\frac{{a}_{e}}{a({\xi}_{p})}}\) \(\frac{\partial m}{\partial {\xi}_{p}}=\frac{{\sigma}_{c}}{{\sigma}_{\text{po}int2}}\left[(-\frac{{a}_{e}}{a{({\xi}_{p})}^{2}})\ln({m}_{e}\frac{{\sigma}_{\text{po}int2}}{{\sigma}_{c}}){({m}_{e}\frac{{\sigma}_{\text{po}int2}}{{\sigma}_{c}})}^{\frac{{a}_{e}}{a({\xi}_{p})}}\right]\frac{\partial a}{\partial {\xi}_{p}}\)
Sur le critère résiduel : Si \({\xi}_{p}\ge {\xi}_{\text{ult}}\)
\(a({\xi}_{p})={a}_{\text{ult}}=1.\) \(\frac{\partial a}{\partial {\xi}_{p}}=0\)
\(s({\xi}_{p})=0\) \(\frac{\partial s}{\partial {\xi}_{p}}=0\)
\(m({\xi}_{p})={m}_{\text{ult}}\) \(\frac{\partial m}{\partial {\xi}_{p}}=0\)
Lois de dilatance#
Les mécanismes élastoplastiques et viscoplastiques sont non-associés. Les lois d’évolution de \({\dot{\varepsilon}}_{ij}^{p}\) et de \({\dot{\epsilon}}_{ij}^{\text{vp}}\) sont régies respectivement par une fonction \(G\) et une fonction \({G}^{\text{visc}}\) , tel que:
\({G}_{ij}=\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}-(\frac{\partial {f}^{d}}{\partial {\sigma}_{kl}}{n}_{kl}){n}_{ij}\) et \({G}_{ij}^{\text{visc}}=\frac{\partial {f}^{\text{vp}}}{\partial {\sigma}_{ij}}-(\frac{\partial {f}^{\text{vp}}}{\partial {\sigma}_{kl}}{n}_{kl}){n}_{ij}\) avec
\({n}_{ij}=\frac{{\beta}^{'}\frac{{s}_{ij}}{{s}_{\text{II}}}-{\delta}_{ij}}{\sqrt{{\beta}^{{'}^{2}}+3}}\) et \({\beta}^{'}=-\frac{2\sqrt{6}\sin(\Psi )}{3-\sin(\Psi )}\)
Le calcul de l’angle de dilatance \(\Psi\) diffère selon les mécanismes visqueux ou élastoplastique pré-pic et élastoplastique post-pic.
Angle de dilatance des mécanismes élastoplastique pré-pic et viscoplastique#
\(\sin(\Psi )={\mu}_{0,v}(\frac{{\sigma}_{\max}-{\sigma}_{\lim}}{{\xi}_{0,v}{\sigma}_{\max}+{\sigma}_{\lim}})\) avec \({\mu}_{0,v}\) et \({\xi}_{0,v}\) des paramètres du modèle.
où
\({\sigma}_{\lim}={\sigma}_{\min}+{\sigma}_{c}{({m}_{v-\max}\frac{{\sigma}_{\min}}{{\sigma}_{c}}+{s}_{v-\max})}^{{a}_{v-\max}}\) avec \({s}_{v-\max}={s}_{0}\) et \({a}_{v-\max}=1\) . \({\sigma}_{c}\) et \({m}_{v-\max}\) sont des paramètres du modèle.
Il existe des conditions sur les paramètres \({\mu}_{0,v}\) et \({\xi}_{0,v}\) qui sont:
\({\mu}_{0,v}<{\xi}_{0,v}\) ou
\(\lbrace \begin{array}{c}{\mu}_{0,v}>{\xi}_{0,v}\\ \frac{{({s}_{\text{pic}})}^{{a}_{\text{pic}}}}{{({s}_{0})}^{{a}_{0}}}\le \frac{1+{\mu}_{0,v}}{{\mu}_{0,v}-{\xi}_{0,v}}\end{array}\)
Angle de dilatance du mécanisme élastoplastique post-pic#
\(\sin(\Psi )={\mu}_{1}(\frac{\alpha -{\alpha}_{\text{res}}}{{\xi}_{1}\alpha +{\alpha}_{\text{res}}})\) avec \({\mu}_{1}\) et \({\xi}_{1}\) paramètres du modèle
où
\(\alpha =\frac{{\sigma}_{\max}+\tilde{\sigma}}{{\sigma}_{\min}+\tilde{\sigma}}\) et \({\alpha}_{\text{res}}=\frac{{\sigma}_{\max}}{{\sigma}_{\min}}=1+{m}_{\text{ult}}\)
\(\tilde{\sigma}=\lbrace \begin{array}{c}\frac{\tilde{c}({\xi}_{p})}{\tan(\tilde{\varphi}({\xi}_{p}))}\text{si}{\xi}_{p}\le {\xi}_{e}\\ 0\text{si}{\xi}_{p}>{\xi}_{e}\end{array}\)
avec \(\tilde{c}({\xi}_{p})=\frac{{\sigma}_{c}.s{({\xi}_{p})}^{a({\xi}_{p})}}{2\sqrt{1+a({\xi}_{p})m({\xi}_{p})s{({\xi}_{p})}^{a({\xi}_{p})-1}}}\) et \(\tilde{\varphi}({\xi}_{p})=2.\text{arctg}(\sqrt{1+a({\xi}_{p})m({\xi}_{p})s{({\xi}_{p})}^{a({\xi}_{p})-1}})-\frac{\pi}{2}\)
\({\sigma}_{\min}\) et \({\sigma}_{\max}\) sont calculées à partir des invariants des contraintes:
\({\sigma}_{\min}=\frac{1}{3}({I}_{1}-(\frac{3}{2}-\frac{\mathrm{2H}(\theta )-({H}_{0}^{c}+{H}_{0}^{e})}{2({H}_{0}^{c}-{H}_{0}^{e})})\sqrt{\frac{3}{2}}{s}_{\text{II}})\)
\({\sigma}_{\max}=\frac{1}{3}({I}_{1}+(\frac{3}{2}+\frac{\mathrm{2H}(\theta )-({H}_{0}^{c}+{H}_{0}^{e})}{2({H}_{0}^{c}-{H}_{0}^{e})})\sqrt{\frac{3}{2}}{s}_{\text{II}})\)
Dérivées du critère#
Calcul de \(\frac{\partial f}{\partial {\sigma}_{ij}}\)#
\(\frac{\partial {I}_{1}}{\partial {\sigma}_{ij}}=\frac{\partial \text{tr}({\sigma}_{ij})}{\partial {\sigma}_{ij}}={\delta}_{ij}\)
\(\frac{\partial ({s}_{\text{II}}H(\theta ))}{\partial {\sigma}_{ij}}=\frac{\partial ({s}_{\text{II}}H(\theta ))}{\partial {s}_{kl}}\frac{\partial {s}_{kl}}{\partial {\sigma}_{ij}}=(\frac{\partial H(\theta )}{\partial {s}_{kl}}{s}_{\text{II}}+H(\theta )\frac{\partial {s}_{\text{II}}}{\partial {s}_{kl}})\frac{\partial {s}_{kl}}{\partial {\sigma}_{ij}}\)
\(\frac{\partial {s}_{\text{II}}}{\partial {s}_{kl}}=\frac{{s}_{kl}}{{s}_{\text{II}}}\) ; \({s}_{\text{II}}=\sqrt{{s}_{kl}.{s}_{kl}}\)
\(\frac{\partial {s}_{kl}}{\partial {\sigma}_{ij}}=\frac{\partial ({\sigma}_{kl}-\frac{1}{3}\text{tr}(\sigma ){\delta}_{kl})}{\partial {\sigma}_{ij}}={\delta}_{\text{ik}}.{\delta}_{\text{jl}}-\frac{1}{3}{\delta}_{ij}.{\delta}_{kl}\)
Remarque: \({s}_{kl}.({\delta}_{\text{ik}}.{\delta}_{\text{jl}}-\frac{1}{3}{\delta}_{ij}.{\delta}_{kl})={s}_{ij}\)
\(\frac{\partial H(\theta )}{\partial {s}_{kl}}=(\frac{{H}_{0}^{c}-{H}_{0}^{e}}{{h}_{0}^{c}-{h}_{0}^{e}})\frac{\partial h(\theta )}{\partial {s}_{kl}}\)
d’où \(\frac{\partial ({s}_{\text{II}}H(\theta ))}{\partial {\sigma}_{ij}}=((\frac{{H}_{0}^{c}-{H}_{0}^{e}}{{h}_{0}^{c}-{h}_{0}^{e}})\frac{\partial h(\theta )}{\partial {s}_{kl}}{s}_{\text{II}}+H(\theta )\frac{{s}_{kl}}{{s}_{\text{II}}}).({\delta}_{\text{ik}}.{\delta}_{\text{jl}}-\frac{1}{3}{\delta}_{ij}.{\delta}_{kl})\)
On a la relation: \(\cos(\mathrm{3\theta })=\sqrt{54}\frac{\det(s)}{{s}_{\text{II}}^{3}}\) (voir Documentation R7.01.13-A: Loi CJS en mécanique)
\(\begin{array}{c}\frac{\partial h(\theta )}{\partial {s}_{kl}}=\frac{1}{6}{(1-\gamma \cos(\mathrm{3\theta }))}^{-\frac{5}{6}}\frac{\partial (1-\gamma \cos(\mathrm{3\theta }))}{\partial {s}_{kl}}=\frac{1}{\mathrm{6h}{(\theta )}^{5}}\frac{\partial}{\partial {s}_{kl}}(\frac{{s}_{\text{II}}^{3}-\gamma \sqrt{54}\det(s)}{{s}_{\text{II}}^{3}})\end{array}\)
\(\begin{array}{c}\frac{\partial h(\theta )}{\partial {s}_{kl}}=\frac{1}{\mathrm{6h}{(\theta )}^{5}}\left\lbrace \left[\frac{\partial {s}_{\text{II}}^{3}}{\partial {s}_{kl}}-\gamma \sqrt{54}(\frac{\partial \det(\underline{\underline{s}})}{\partial {s}_{kl}})\right]\frac{{s}_{\text{II}}^{3}}{{s}_{\text{II}}^{6}}-({s}_{\text{II}}^{3}-\gamma \sqrt{54}\det(\underline{\underline{s}}))\frac{{\mathrm{3s}}_{kl}{s}_{\text{II}}}{{s}_{\text{II}}^{6}}\right\rbrace \\ =\frac{1}{\mathrm{6h}{(\theta )}^{5}}\left\lbrace \frac{{\mathrm{3s}}_{kl}}{{s}_{\text{II}}^{2}}-\gamma \sqrt{54}(\frac{\partial \det(\underline{\underline{s}})}{\partial {s}_{kl}})\frac{1}{{s}_{\text{II}}^{3}}-(1-\gamma \cos(\mathrm{3\theta }))\frac{{\mathrm{3s}}_{kl}}{{s}_{\text{II}}^{2}}\right\rbrace \\ =\frac{\gamma \cos(\mathrm{3\theta })}{\mathrm{6h}{(\theta )}^{5}}\frac{{\mathrm{3s}}_{kl}}{{s}_{\text{II}}^{2}}-\frac{\gamma \sqrt{54}}{\mathrm{6h}{(\theta )}^{5}{s}_{\text{II}}^{3}}(\frac{\partial \det(\underline{\underline{s}})}{\partial {s}_{kl}})\end{array}\)
On trouve donc:
\(\begin{array}{c}\frac{\partial ({s}_{\text{II}}H(\theta ))}{\partial {\sigma}_{ij}}=\\ ((\frac{{H}_{0}^{c}-{H}_{0}^{e}}{{h}_{0}^{c}-{h}_{0}^{e}})(\frac{\gamma \cos(\mathrm{3\theta })}{\mathrm{6h}{(\theta )}^{5}}\frac{{\mathrm{3s}}_{kl}}{{s}_{\text{II}}^{2}}-\frac{\gamma \sqrt{54}}{\mathrm{6h}{(\theta )}^{5}{s}_{\text{II}}^{3}}(\frac{\partial \det(\underline{\underline{s}})}{\partial {s}_{kl}})){s}_{\text{II}}+H(\theta )\frac{{s}_{kl}}{{s}_{\text{II}}}).({\delta}_{\text{ik}}.{\delta}_{\text{jl}}-\frac{1}{3}{\delta}_{ij}.{\delta}_{kl})\end{array}\)
Finalement :
Pour le critère élastoplastique :
\(\begin{array}{c}\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}=\\ \frac{\partial ({s}_{\text{II}}H(\theta ))}{\partial {\sigma}_{ij}}-{a}^{d}({\xi}_{p}){\sigma}_{c}{H}_{0}^{c}{\left[{A}^{d}({\xi}_{p}){s}_{\text{II}}H(\theta )+{B}^{d}({\xi}_{p}){I}_{1}+{D}^{d}({\xi}_{p})\right]}^{{a}^{d}({\xi}_{p})-1}\\ ({A}^{d}({\xi}_{p})\frac{\partial ({s}_{\text{II}}H(\theta ))}{\partial {\sigma}_{ij}}+{B}^{d}({\xi}_{p}){I}_{d})\end{array}\)
et pour le critère visqueux:
\(\begin{array}{c}\frac{\partial {f}^{\text{vp}}}{\partial {\sigma}_{ij}}=\\ \frac{\partial ({s}_{\text{II}}H(\theta ))}{\partial {\sigma}_{ij}}-{a}^{\text{vp}}({\xi}_{\text{vp}}){\sigma}_{c}{H}_{0}^{c}{\left[{A}^{\text{vp}}({\xi}_{\text{vp}}){s}_{\text{II}}H(\theta )+{B}^{\text{vp}}({\xi}_{\text{vp}}){I}_{1}+{D}^{\text{vp}}({\xi}_{\text{vp}})\right]}^{{a}^{\text{vp}}({\xi}_{\text{pp}})-1}\\ ({A}^{\text{vp}}({\xi}_{\text{vp}})\frac{\partial ({s}_{\text{II}}H(\theta ))}{\partial {\sigma}_{ij}}+{B}^{\text{vp}}({\xi}_{\text{vp}}){I}_{d})\end{array}\)
avec \(\frac{\partial ({s}_{\text{II}}H(\theta ))}{\partial {\sigma}_{ij}}=\)
\(((\frac{{H}_{0}^{c}-{H}_{0}^{e}}{{h}_{0}^{c}-{h}_{0}^{e}})(\frac{\gamma \cos(\mathrm{3\theta })}{\mathrm{6h}{(\theta )}^{5}}\frac{{\mathrm{3s}}_{kl}}{{s}_{\text{II}}^{2}}-\frac{\gamma \sqrt{54}}{\mathrm{6h}{(\theta )}^{5}{s}_{\text{II}}^{3}}(\frac{\partial \det(\underline{\underline{s}})}{\partial {s}_{kl}})){s}_{\text{II}}+H(\theta )\frac{{s}_{kl}}{{s}_{\text{II}}}).({\delta}_{\text{ik}}.{\delta}_{\text{jl}}-\frac{1}{3}{\delta}_{ij}.{\delta}_{kl})\)
Calcul de \(\frac{\partial {f}^{d}}{\partial {\xi}_{p}}\)#
Expression du seuil en contraintes:
\({f}^{d}(\sigma )={s}_{\text{II}}H(\theta )-{\sigma}_{c}{H}_{0}^{c}{\left[{A}^{d}({\xi}_{p}){s}_{\text{II}}H(\theta )+{B}^{d}({\xi}_{p}){I}_{1}+{D}^{d}({\xi}_{p})\right]}^{{a}^{d}({\xi}_{p})}\)
avec \({A}^{d}({\xi}^{p})=-\frac{{m}^{d}({\xi}_{p}){k}^{d}({\xi}_{p})}{\sqrt{6}{\sigma}_{c}{h}_{c}^{0}}\) , \({B}^{d}({\xi}_{p})=\frac{{m}^{d}({\xi}_{p}){k}^{d}({\xi}_{p})}{{\mathrm{3\sigma }}_{c}}\) , \({D}^{d}({\xi}_{p})={s}^{d}({\xi}_{p})k({\xi}_{p})\) , \({k}^{d}({\xi}_{p})={(\frac{2}{3})}^{\frac{1}{{\mathrm{2a}}^{d}({\xi}_{p})}}\)
\(\frac{\partial {f}^{d}}{\partial {\xi}_{p}}=\frac{\partial {f}^{d}}{\partial {a}^{d}}.{\dot{a}}^{d}({\xi}_{p})+\frac{\partial f}{\partial {m}^{d}}.{\dot{m}}^{d}({\xi}_{p})+\frac{\partial f}{\partial {s}^{d}}.{\dot{s}}^{d}({\xi}_{p})\)
\(\frac{\partial {f}^{d}}{\partial {s}^{d}}=-{a}^{d}{k}^{d}{\sigma}_{c}{H}_{0}^{c}{\left[{A}^{d}{s}_{\text{II}}H(\theta )+{B}^{d}{I}_{1}+{D}^{d}\right]}^{{a}^{d}-1}\)
\(\frac{\partial {f}^{d}}{\partial {m}^{d}}=-{a}^{d}{\sigma}_{c}{H}_{0}^{c}\left[\frac{{A}^{d}}{{m}^{d}}{s}_{\text{II}}H(\theta )+\frac{{B}^{d}}{{m}^{d}}{I}_{1}\right]{\left[{A}^{d}{s}_{\text{II}}H(\theta )+{B}^{d}{I}_{1}+{D}^{d}\right]}^{{a}^{d}-1}\)
\(\frac{\partial {f}^{d}}{\partial {a}^{d}}=\)
\({\sigma}_{c}{H}_{0}^{c}{\dot{a}}^{d}{\left[{A}^{d}{s}_{\text{II}}H(\theta )+{B}^{d}{I}_{1}+{D}^{d}\right]}^{{a}^{d}}.\left[\ln\left[{A}^{d}{s}_{\text{II}}H(\theta )+{B}^{d}{I}_{1}+{D}^{d}\right]-\frac{\frac{{s}^{d}}{{\mathrm{2a}}^{d}}\ln(\frac{2}{3}){(\frac{2}{3})}^{(\frac{1}{\mathrm{2a}})}}{\left[{A}^{d}{s}_{\text{II}}H(\theta )+{B}^{d}{I}_{1}+{D}^{d}\right]}\right]\)
Intégration dans Code_Aster#
L’intégration du modèle LETK peut être réalisée suivant deux schémas d’intégration distincts. Le premier schéma d’intégration («historique») est décrit comme SPECIFIQUE et correspond à un schéma d’intégration explicite. Le second schéma est construit sur la base des schémas d’intégration implicite. Il est accessible sous le mot-clé NEWTON_PERT .
Variables internes#
\({V}_{1}\) : variable d’écrouissage élastoplastique \({\xi}_{p}\)
\({V}_{2}\) : déformation déviatorique plastique \({\gamma}_{p}\)
\({V}_{3}\) : variable d’écrouissage viscoplastique \({\xi}_{\text{vp}}\)
\({V}_{4}\) : déformation déviatorique viscoplastique \({\gamma}_{\text{vp}}\)
\({V}_{5}\) : \(0\) si contractance , \(1\) si dilatance
\({V}_{6}\) : indicateur de viscoplasticité
\({V}_{7}\) : indicateur de plasticité
\({V}_{8}\) : Les domaines de comportement de la roche en plasticité
Cinq domaines de comportement, numérotés de 0 à 4 (cf. figure), sont identifiés pour permettre d’avoir une représentation relativement simple de l’état d’endommagement de la roche, depuis la roche intacte jusqu’à la roche à l’état résiduel. Ces domaines sont fonction de la déformation déviatoire plastique cumulée \({\gamma}^{p}\) et de l’état de contrainte. Chaque incrément de numéro de domaine définit le passage dans un domaine d’endommagement supérieur.
Si le déviateur est inférieur à 70% du déviateur de pic, alors le matériau est dans le domaine 0;
Sinon:
Si \({\gamma}^{p}=0\) alors le matériau est dans le domaine 1;
Si \(0<{\gamma}^{p}<{\gamma}^{e}\) alors le matériau est dans le domaine 2;
Si \({\gamma}_{e}<{\gamma}^{p}<{\gamma}_{\text{ult}}\) alors le matériau est dans le domaine 3;

Si \({\gamma}^{p}>{\gamma}_{\text{ult}}\) alors le matériau est dans le domaine 4.

\({V}_{9}\) : position de l’état de contraintes par rapport aux seuils de viscosité.
Quatre domaines de comportement, numérotés de 1 à 4 (cf. figure), sont identifiés pour permettre d’avoir une représentation simple du comportement visqueux du matériau, depuis la roche intacte jusqu’à la roche à l’état résiduel. Ces domaines sont fonction de la déformation déviatoire visco-plastique cumulée \({\gamma}^{\mathit{vp}}\) et de l’état de contrainte.
Schéma d’intégration explicite ( SPECIFIQUE )#
Mise à jour des contraintes#
On exprime les contraintes actualisées à l’instant + par rapport à celles calculées à l’instant -:
\(\sigma ={\sigma}^{-}+{D}^{e}{\mathit{\Delta \epsilon }}^{e}\) ; \(s={s}^{-}+\mathrm{2G\Delta }{\tilde{\epsilon}}^{e}\) ; \({I}_{1}={I}_{1}^{-}+{\mathrm{3K\Delta \epsilon }}_{v}^{e}\)
\({\sigma}_{ij}={s}_{ij}+\frac{{I}_{1}}{3}{\delta}_{ij}\) ; \({\mathit{\Delta \epsilon }}_{ij}=\Delta {\tilde{\epsilon}}_{ij}+\frac{\text{tr}(\mathit{\Delta \epsilon })}{3}{\delta}_{ij}=\Delta {\tilde{\epsilon}}_{ij}+\frac{{\mathit{\Delta \epsilon }}_{v}}{3}{\delta}_{ij}\) ; \({I}_{1}=\text{tr}(\sigma )\) ; \({\epsilon}_{v}=\text{tr}(\mathit{\Delta \epsilon })\)
Prédiction élastique:
\({\sigma}^{e}={\sigma}^{-}+{D}^{e}\mathit{\Delta \epsilon }\) ; \({s}^{e}={s}^{-}+\mathrm{2G\Delta }\tilde{\epsilon}\) ; \({I}_{1}^{e}={I}_{1}^{-}+{\mathrm{3K\Delta \epsilon }}_{v}\)
\(K={K}_{0}^{e}{\left[\frac{{I}_{1}^{-}}{{\mathrm{3P}}_{a}}\right]}^{{n}_{\text{elas}}}\) et \(G={G}_{0}^{e}{\left[\frac{{I}_{1}^{-}}{{\mathrm{3P}}_{a}}\right]}^{{n}_{\text{elas}}}\)
Remarque: Le coefficient de compressibilité \(K\) et le module de cisaillement \(G\) sont considérés à l’instant -.
Hypoélasticité#
\({\mathit{\Delta \sigma }}_{ij}={\mathit{\Delta s}}_{ij}+\frac{{\mathit{\Delta I}}_{1}}{3}{\delta}_{ij}\) \({\mathit{\Delta \epsilon }}_{ij}=\Delta {\tilde{\epsilon}}_{ij}+\frac{{\mathit{\Delta \epsilon }}_{v}}{3}{\delta}_{ij}\) \({\mathit{\Delta \sigma }}_{ij}={\mathrm{2G\Delta \epsilon }}_{ij}+(K-\frac{\mathrm{2G}}{3})\text{tr}(\mathit{\Delta \epsilon }){\delta}_{ij}\)
\(\left\lbrace \begin{array}{c}\Delta {\sigma}_{11}\\ \Delta {\sigma}_{22}\\ \Delta {\sigma}_{33}\\ \sqrt{2}\Delta {\sigma}_{12}\\ \sqrt{2}\Delta {\sigma}_{13}\\ \sqrt{2}\Delta {\sigma}_{23}\end{array}\right\rbrace =\underset{{D}^{e}}{\underset{\underbrace{}}{\left[\begin{array}{cccccc}\frac{\mathrm{4G}}{3}+K& K-\frac{\mathrm{2G}}{3}& K-\frac{\mathrm{2G}}{3}& 0& 0& 0\\ K-\frac{\mathrm{2G}}{3}& \frac{\mathrm{4G}}{3}+K& K-\frac{\mathrm{2G}}{3}& 0& 0& 0\\ K-\frac{\mathrm{2G}}{3}& K-\frac{\mathrm{2G}}{3}& \frac{\mathrm{4G}}{3}+K& 0& 0& 0\\ 0& 0& 0& \mathrm{2G}& 0& 0\\ 0& 0& 0& 0& \mathrm{2G}& 0\\ 0& 0& 0& 0& 0& \mathrm{2G}\end{array}\right]}}.\left\lbrace \begin{array}{c}{\mathit{\Delta \epsilon }}_{11}\\ \Delta {\varepsilon}_{22}\\ \Delta {\varepsilon}_{33}\\ \sqrt{2}\Delta {\varepsilon}_{12}\\ \sqrt{2}\Delta {\varepsilon}_{13}\\ \sqrt{2}\Delta {\varepsilon}_{23}\end{array}\right\rbrace\)
Plasticité et viscoplasticité#
On exprime le champ de contraintes à l’instant \(+\) :
\({\sigma}_{ij}={\sigma}_{ij}^{-}+{D}_{ijkl}^{e}{\mathrm{\Delta \epsilon }}_{kl}^{e}={\sigma}_{ij}^{-}+{D}_{ijkl}^{e}({\mathrm{\Delta \epsilon }}_{kl}-{\mathrm{\Delta \epsilon }}_{kl}^{p}-{\mathrm{\Delta \epsilon }}_{kl}^{\text{vp}})\)
qui s’écrit en remplaçant l’accroissement des déformations plastiques et visqueuses par leurs expressions sous la forme:
\({\sigma}_{ij}={\sigma}_{ij}^{-}+{D}_{ijkl}^{e}({\mathrm{\Delta \epsilon }}_{kl}-{\mathrm{\Delta \lambda G}}_{kl}({\sigma}^{-},{\xi}_{p}^{-})-\langle \phi \rangle {G}_{kl}^{\text{visc}}({\sigma}^{-},{\xi}_{v}^{-})\mathrm{\Delta t})\)
La principale inconnue est le multiplicateur plastique \(\mathrm{\Delta \lambda }\) .
On cherche \(\mathit{\Delta \lambda }/{f}^{d}(\sigma ,{\xi}_{p})=0\)
\({f}^{d}({\sigma}_{ij}^{-}+{D}_{ijkl}^{e}({\mathrm{\Delta \epsilon }}_{kl}-{\mathrm{\Delta \lambda G}}_{kl}({\sigma}^{-},{\xi}_{p}^{-})-\langle \phi \rangle {G}_{kl}^{\text{visc}}({\sigma}^{-},{\xi}_{v}^{-})\mathrm{\Delta t}),{\xi}_{p}^{-}+{\mathrm{\Delta \xi }}_{p})=0\)
avec \({\mathit{\Delta \gamma }}_{p}=\mathit{\Delta \lambda }\sqrt{\frac{2}{3}{\tilde{G}}_{ij}{\tilde{G}}_{ij}}=\mathit{\Delta \lambda }\sqrt{\frac{2}{3}}{G}_{\text{II}}\)
On choisit de faire une résolution explicite avec un développement d’Euler:
\({f}^{d}({\sigma}_{ij}^{-}+{D}_{ijkl}^{e}{\mathrm{\Delta \epsilon }}_{kl}-{D}_{ijkl}^{e}\langle \Phi \rangle {G}_{kl}^{\text{visc}}({\sigma}^{-},{\xi}_{v}^{-})\mathrm{\Delta t},{\xi}_{p}^{-})-\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}^{e}{G}_{kl}({\sigma}^{-},{\xi}_{p}^{-})\mathrm{\Delta \lambda }+\frac{\partial {f}^{d}}{\partial {\xi}_{p}}{\mathrm{\Delta \xi }}_{p}=0\)
On distingue les deux cas:
\({\mathrm{\Delta \xi }}_{p}={\mathrm{\Delta \gamma }}_{p}+{\mathrm{\Delta \gamma }}_{\text{vp}}\) (cas dilatant: l’état de contraintes dépasse la limite contractance/dilatance)
\({f}^{d}({\sigma}_{ij}^{-}+{D}_{ijkl}^{e}{\mathit{\Delta \epsilon }}_{kl}-{D}_{ijkl}^{e}\langle \Phi \rangle {G}_{kl}^{\text{visc}}({\sigma}^{-},{\xi}_{v}^{-})\mathit{\Delta t},{\xi}_{p}^{-})\)
\(-\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}^{e}{G}_{kl}({\sigma}^{-},{\xi}_{p}^{-})\mathit{\Delta \lambda }+\frac{\partial {f}^{d}}{\partial {\xi}_{p}}({\mathit{\Delta \gamma }}_{p}+{\mathit{\Delta \gamma }}_{\text{vp}})=0\)
\(\begin{array}{c}{f}^{d}({\sigma}_{ij}^{-}+{D}_{ijkl}^{e}\Delta {\epsilon}_{kl}-{D}_{ijkl}^{e}<\Phi >{G}_{kl}^{\mathit{visc}}({\sigma}^{-},{\xi}_{v}^{-})\Delta t,{\xi}_{p}^{-})=\\ (\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}^{e}{G}_{kl}({\sigma}^{-},{\xi}_{p}^{-})-\frac{\partial {f}^{d}}{\partial {\xi}_{p}}\sqrt{\frac{2}{3}}{G}_{\mathit{II}}({\sigma}^{-},{\xi}_{p}^{-})\Delta \lambda -\frac{\partial {f}^{d}}{\partial {\xi}_{p}}\Delta {\gamma}_{\mathit{vp}})\end{array}\)
\(\mathrm{\Delta \lambda }=\frac{{f}^{d}({\sigma}_{ij}^{-},{\xi}_{p}^{-})+\frac{\partial {f}^{d}}{\partial {\xi}_{p}}{\mathrm{\Delta \gamma }}_{\text{vp}}+\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}\left[{D}_{ijkl}^{e}{\mathrm{\Delta \epsilon }}_{kl}-{D}_{ijkl}^{e}\langle \Phi \rangle {G}_{kl}^{\text{visc}}({\sigma}^{-},{\xi}_{\text{vp}}^{-})\mathrm{\Delta t}\right]}{(\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}^{e}{G}_{kl}({\sigma}^{-},{\xi}_{p}^{-})-\frac{\partial {f}^{d}}{\partial {\xi}_{p}}\sqrt{\frac{2}{3}}{\tilde{G}}_{\text{II}}({\sigma}^{-},{\xi}_{p}^{-}))}\)
\({\mathrm{\Delta \xi }}_{p}={\mathrm{\Delta \gamma }}_{p}\) (cas contractant : l’état de contraintes est en dessous de la limite contractance/dilatance)
\(\mathrm{\Delta \lambda }=\frac{{f}^{d}({\sigma}_{ij}^{-},{\xi}_{p}^{-})+\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}\left[{D}_{ijkl}^{e}{\mathrm{\Delta \epsilon }}_{kl}-{D}_{ijkl}^{e}\langle \Phi \rangle {G}_{kl}^{\text{visc}}({\sigma}^{-},{\xi}_{\text{vp}}^{-})\mathrm{\Delta t}\right]}{(\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}^{e}{G}_{kl}({\sigma}^{-},{\xi}_{p}^{-})-\frac{\partial {f}^{d}}{\partial {\xi}_{p}}\sqrt{\frac{2}{3}}{\tilde{G}}_{\text{II}}({\sigma}^{-},{\xi}_{p}^{-}))}\)
avec \(\Phi ={A}_{v}{(\frac{{f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})}{\text{Pa}})}^{{n}_{v}}\) , \({A}_{v}\) et \({n}_{v}\) sont des paramètres du modèle.
Opérateur tangent#
La contrainte à l’état \(+\) :
\(\begin{array}{}{\sigma}_{ij}={\sigma}_{ij}^{-}+{D}_{ijkl}^{e}\Delta {\epsilon}_{kl}^{e}={\sigma}_{ij}^{-}+{D}_{ijkl}^{e}(\Delta {\epsilon}_{kl}-\Delta {\epsilon}_{kl}^{p}-\Delta {\epsilon}_{kl}^{\mathrm{vp}})=\\ {\sigma}_{ij}^{-}+{D}_{ijkl}^{e}(\Delta {\epsilon}_{kl}-\Delta \lambda {G}_{kl}({\sigma}^{-},{\xi}_{p}^{-})-\langle \Phi \rangle {G}_{kl}^{\mathrm{visc}}({\sigma}^{-},{\xi}_{\mathrm{vp}}^{-})\Delta t)\end{array}\)
\(\frac{\partial {\sigma}_{ij}}{\partial {\mathrm{\Delta \epsilon }}_{kl}}={D}_{ijkl}^{e}-{D}_{\text{ijmn}}^{e}{G}_{\text{mn}}^{-}\frac{\partial \mathrm{\Delta \lambda }}{\partial {\mathrm{\Delta \epsilon }}_{kl}}-{D}_{\text{ijmn}}^{e}{G}_{\text{imn}}^{\text{visc}-}\frac{\partial \langle \phi \rangle }{\partial {\mathrm{\Delta \epsilon }}_{kl}}\mathrm{\Delta t}\)
On distingue les deux cas:
\({\mathrm{\Delta \xi }}_{p}={\mathrm{\Delta \gamma }}_{p}\) (cas contractant : l’état de contraintes est en dessous du seuil caractéristique)
\(\mathrm{\Delta \lambda }=\frac{{f}^{d}({\sigma}_{ij}^{-},{\xi}_{p}^{-})+\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}\left[{D}_{ijkl}^{e}{\mathrm{\Delta \epsilon }}_{kl}-{D}_{ijkl}^{e}\langle \Phi \rangle {G}_{kl}^{\text{visc}}({\sigma}^{-},{\xi}_{v}^{-})\mathrm{\Delta t}\right]}{(\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}^{e}{G}_{kl}({\sigma}^{-},{\xi}_{p}^{-})-\frac{\partial {f}^{d}}{\partial {\xi}_{p}}\sqrt{\frac{2}{3}}{\tilde{G}}_{\text{II}}({\sigma}^{-},{\xi}_{p}^{-}))}\) et \(\Phi ={A}_{v}{(\frac{{f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})}{\text{Pa}})}^{{n}_{v}}\)
\(\frac{\partial \mathrm{\Delta \lambda }}{\partial {\mathrm{\Delta \epsilon }}_{kl}}=\frac{\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}.\left[{D}_{ijkl}^{e}-{D}_{\text{ijmn}}^{e}{G}_{\text{mn}}^{\text{visc}}({\sigma}^{-},{\xi}_{v}^{-})\frac{\partial \Phi }{\partial {\mathrm{\Delta \epsilon }}_{kl}}\mathrm{\Delta t}\right]}{(\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{\text{ijmn}}^{e}{G}_{\text{mn}}({\sigma}^{-},{\xi}_{p}^{-})-\frac{\partial {f}^{d}}{\partial {\xi}_{p}}\sqrt{\frac{2}{3}}{\tilde{G}}_{\text{II}}({\sigma}^{-},{\xi}_{p}^{-}))}\)
\(\frac{\partial \Phi }{\partial {\mathrm{\Delta \epsilon }}_{kl}}=\frac{{A}_{v}.{n}_{v}}{\text{Patm}}{(\frac{{f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})}{\text{Patm}})}^{{n}_{v}-1}.\frac{\partial {f}^{\text{vp}}}{\partial {\sigma}_{ij}^{e}}.\frac{\partial {\sigma}_{ij}^{e}}{\partial {\mathrm{\Delta \epsilon }}_{kl}}=\frac{{A}_{v}.{n}_{v}}{\text{Patm}}{(\frac{{f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})}{\text{Patm}})}^{{n}_{v}-1}.\frac{\partial {f}^{\text{vp}}}{\partial {\sigma}_{ij}^{e}}.{D}_{ijkl}^{e}\)
\(\begin{array}{}\frac{\partial {\sigma}_{ij}}{\partial {\mathrm{\Delta \epsilon }}_{kl}}={D}_{ijkl}^{e}-{D}_{\text{ijmn}}^{e}.{G}_{\text{mn}}^{-}\frac{\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}.\left[{D}_{ijkl}^{e}-{D}_{\text{ijmn}}^{e}{G}_{\text{mn}}^{\text{visc}}({\sigma}^{-},{\xi}_{p}^{-})\frac{\partial \Phi }{\partial {\mathrm{\Delta \epsilon }}_{kl}}\mathrm{\Delta t}\right]}{(\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}^{e}{G}_{kl}({\sigma}^{-},{\xi}_{p}^{-})-\frac{\partial {f}^{d}}{\partial {\xi}_{p}}\sqrt{\frac{2}{3}}{\tilde{G}}_{\text{II}}({\sigma}^{-},{\xi}_{p}^{-}))}-\\ {D}_{\text{ijmn}}^{e}.{G}_{\text{mn}}^{\text{visc}-}\frac{{A}_{v}.{n}_{v}}{\text{Patm}}{(\frac{{f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})}{\text{Patm}})}^{{n}_{v}-1}.\frac{\partial {f}^{\text{vp}}}{\partial {\sigma}_{ij}^{e}}.{D}_{ijkl}^{e}\mathrm{\Delta t}\end{array}\)
\(\Delta {\xi}_{p}=\Delta {\gamma}_{p}+\Delta {\gamma}_{v}\) (cas dilatant: l’état de contraintes dépasse le seuil caractéristique)
\(\mathrm{\Delta \lambda }=\frac{{f}^{d}({\sigma}_{ij}^{-},{\xi}_{p}^{-})+\frac{\partial {f}^{d}}{\partial {\xi}_{p}}{\mathrm{\Delta \gamma }}_{\text{vp}}+\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}\left[{D}_{ijkl}^{e}{\mathrm{\Delta \epsilon }}_{kl}-{D}_{ijkl}^{e}\langle \Phi \rangle {G}_{kl}^{\text{visc}}({\sigma}^{-},{\xi}_{\text{vp}}^{-})\mathrm{\Delta t}\right]}{(\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}^{e}{G}_{kl}({\sigma}^{-},{\xi}_{p}^{-})-\frac{\partial {f}^{d}}{\partial {\xi}_{p}}\sqrt{\frac{2}{3}}{\tilde{G}}_{\text{II}}({\sigma}^{-},{\xi}_{p}^{-}))}\)
\(\frac{\partial \mathrm{\Delta \lambda }}{\partial {\mathrm{\Delta \epsilon }}_{kl}}=\frac{\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}.\left[{D}_{ijkl}^{e}-{D}_{\text{ijmn}}^{e}{G}_{\text{mn}}^{\text{visc}}({\sigma}^{-},{\xi}_{p}^{-})\frac{\partial \Phi }{\partial {\mathrm{\Delta \epsilon }}_{kl}}\mathrm{\Delta t}\right]+\frac{\partial {f}^{d}}{\partial {\xi}_{p}}.\frac{\partial {\mathrm{\Delta \gamma }}_{\text{vp}}}{\partial {\mathrm{\Delta \epsilon }}_{kl}^{\text{vp}}}.\frac{\partial {\mathrm{\Delta \epsilon }}_{kl}^{\text{vp}}}{\partial {\mathrm{\Delta \sigma }}_{ij}^{e}}.{D}_{ijkl}^{e}}{(\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{\text{ijmn}}^{e}{G}_{\text{mn}}({\sigma}^{-},{\xi}_{p}^{-})-\frac{\partial {f}^{d}}{\partial {\xi}_{p}}\sqrt{\frac{2}{3}}{\tilde{G}}_{\text{II}}({\sigma}^{-},{\xi}_{p}^{-}))}\)
où:
\(\frac{\partial {\mathrm{\Delta \gamma }}_{\text{vp}}}{\partial {\mathrm{\Delta \epsilon }}_{kl}^{\text{vp}}}=\frac{1}{2}{(\frac{2}{3}\Delta {\tilde{\epsilon}}_{ij}^{\text{vp}}.\Delta {\tilde{\epsilon}}_{ij}^{\text{vp}})}^{-\frac{1}{2}}.\frac{2}{3}.2.\Delta {\tilde{\epsilon}}_{ij}^{\text{vp}}.\frac{\partial \Delta {\tilde{\epsilon}}_{ij}^{\text{vp}}}{\partial {\mathrm{\Delta \epsilon }}_{kl}^{\text{vp}}}=\frac{2}{3}.\frac{\Delta {\tilde{\epsilon}}_{ij}^{\text{vp}}}{{\mathrm{\Delta \gamma }}_{\text{vp}}}.({\delta}_{\text{ik}}.{\delta}_{\text{jl}}-\frac{1}{3}{\delta}_{ij}.{\delta}_{kl})\)
\(\frac{\partial {\mathrm{\Delta \epsilon }}_{kl}^{\text{vp}}}{\partial {\mathrm{\Delta \sigma }}_{ij}^{e}}=\frac{{n}_{v}.{A}_{v}}{\text{Patm}}.{(\frac{{f}^{\text{vp}}({\sigma}^{e},{\xi}_{v}^{-})}{\text{Patm}})}^{{n}_{v}-1}.\frac{\partial {f}^{\text{vp}}}{\partial {\sigma}_{ij}^{e}}.{G}_{kl}^{\text{visc}-}({\sigma}^{-},{\xi}_{\text{vp}}^{-})\mathrm{\Delta t}\)
Algorithme de résolution dans Code_Aster#
Changement de signe des contraintes à l’état \(-\) et de l’accroissement de la déformation:
\({\sigma}_{L\wedge K}^{-}=-{\sigma}^{-}\)
\({\mathrm{\Delta \epsilon }}_{L\wedge K}=-\mathrm{\Delta \epsilon }\)
Calcul de la contrainte de prédiction élastique \({\sigma}^{e}\) : \({\sigma}^{e}={\sigma}^{-}+{D}^{e}\mathrm{\Delta \epsilon }\)
Vérification du signe du critère visqueux avec la variable visqueuse max: \({f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}-\max})\)
Si \({f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}-\max})>0\) :cas dilatant et écrouissage couplé \({V}_{5}=1\) . On considère comme variable d’écrouissage du critère plastique le cumul entre la variable d’écrouissage plastique et la variable visqueuse: \(\Delta {\xi}_{p}=\Delta {\gamma}_{p}+\Delta {\gamma}_{\text{vp}}\)
Si \({f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}-\max})<0\) : cas contractant et écrouissage non couplé \({V}_{5}=0\) . La variable d’écrouissage du critère plastique est la variable plastique: \(\Delta {\xi}_{p}=\Delta {\gamma}_{p}\)
Pour le critère visqueux: \({u}^{\text{vp}}={A}^{\text{vp}}({\xi}_{\text{vp}}){s}_{\text{II}}H(\theta )+{B}^{\text{vp}}({\xi}_{\text{vp}}){I}_{1}+{D}^{\text{vp}}({\xi}_{\text{vp}})\)
Si \({u}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})<0\) :
si \(-\frac{{D}^{\text{vp}}}{{B}^{\text{vp}}}<-\frac{{D}^{d}}{{B}^{d}}\) ( Figure 4.2.3-a ) alors redécoupage du pas de temps
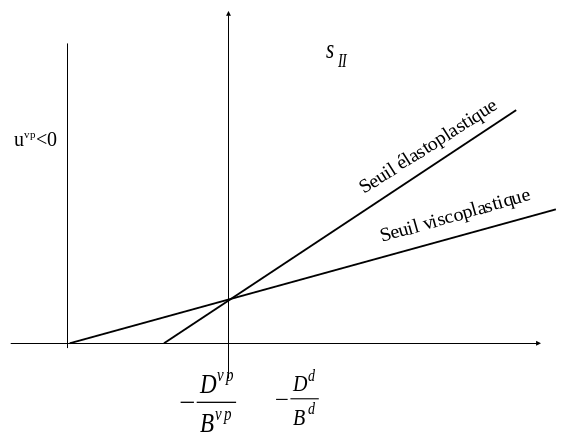
Figure 4.2.3-a *. Représentation schématique dans le cas* \({u}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})<0\) , \(-\frac{{D}^{\text{vp}}}{{B}^{\text{vp}}}<-\frac{{D}^{d}}{{B}^{d}}\)
Sinon( Figure 4.2.3-b ) deux cas se présentent:
si \({\sigma}^{e}\) se trouve dans la zone \(A\) alors \({f}^{\text{vp}}({\sigma}^{e})\) n’est pas définie mais on peut faire une projection géométrique (cf. remarque du paragraphe 3.3.3 )
si \({\sigma}^{e}\) se trouve dans la zone \(B\) alors il faut faire une projection au sommet.
On se contente alors du message: «arrêt pour coefficients matériaux de la loi non cohérents».
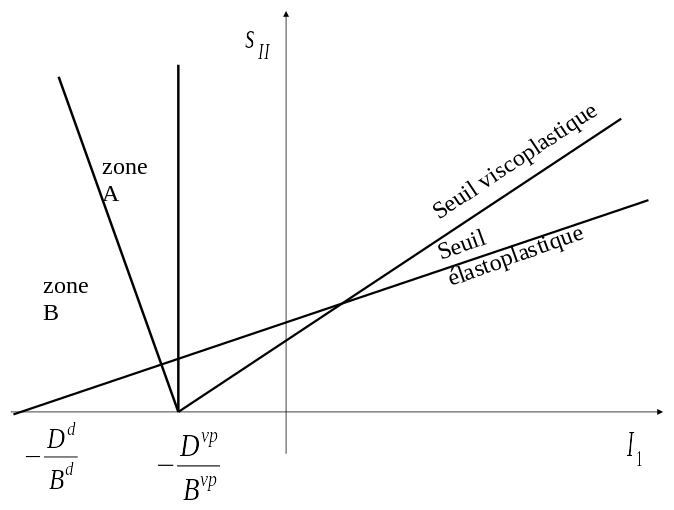
Figure 4.2.3-b.Représentation schématique dans le cas \({u}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})<0\) , \(-\frac{{D}^{d}}{{B}^{d}}<-\frac{{D}^{\text{vp}}}{{B}^{\text{vp}}}\)
Pour le critère élastoplastique:
\({u}^{d}={A}^{d}({\xi}_{p}){s}_{\text{II}}H(\theta )+{B}^{d}({\xi}_{p}){I}_{1}+{D}^{d}({\xi}_{p})\)
Si \({u}^{d}({\sigma}^{e},{\xi}_{p}^{-})<0\) alors il y a redécoupage du pas de temps
Pour le critère visqueux:
Si \({f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})<0\) alors pas de fluage et \({\mathrm{\Delta \epsilon }}_{\text{vp}}=0\)
Si \({f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})>0\) alors le fluage se développeselon la forme suivante:
\({\mathrm{\Delta \epsilon }}_{\text{vp}}=A{\left[\frac{\langle {f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})\rangle }{\text{Patm}}\right]}^{{n}_{v}}{G}^{\text{visc}}({\sigma}^{-},{\xi}_{\text{vp}}^{-})\mathrm{\Delta t}\) avec \({G}^{\text{visc}}=\frac{\partial {f}^{\text{vp}}}{\partial \sigma }-(\frac{\partial {f}^{\text{vp}}}{\partial \sigma }n)n\)
\(\langle \rangle\) : Les crochets de Macauley
où \(\sin(\Psi )={\mu}_{0,v}(\frac{{\sigma}_{\max}-{\sigma}_{\lim}}{{\xi}_{0,v}{\sigma}_{\max}+{\sigma}_{\lim}})\) (voir § 3.6.1 ) , \({\beta}^{'}\) et \(n\) sont déduits
on peut déduire \(\Delta {\gamma}_{\text{vp}}=\sqrt{\frac{2}{3}\Delta {\tilde{\varepsilon}}_{\text{vp}}.\Delta {\tilde{\varepsilon}}_{\text{vp}}}>0\) où \(\Delta {\tilde{\varepsilon}}_{\text{vp}}=\Delta {\varepsilon}_{\text{vp}}-\frac{\text{tr}(\Delta {\varepsilon}_{\text{vp}})}{3}{I}^{d}\)
réactualisation de la variable d’écrouissage du critère visqueux:
\({\xi}_{\text{vp}}={\xi}_{\text{vp}}^{-}+\Delta {\xi}_{\text{vp}}\) avec \(\Delta {\xi}_{\text{vp}}=\text{Min}\left[\Delta {\gamma}_{\text{vp}},{\xi}_{v-\max}-{\xi}_{\text{vp}}^{-}\right]\)
réactualisation des contraintes: \(\sigma ={\sigma}^{e}-{D}^{e}{\mathrm{\Delta \epsilon }}_{\text{vp}}\)
réactualisation des variables internes:
\({V}_{1}={\xi}_{p}={\xi}_{p}^{-}+{\mathrm{\Delta \gamma }}_{\text{vp}}\)
\({V}_{2}={\gamma}_{p}={\gamma}_{p}^{-}\)
\({V}_{3}={\xi}_{\text{vp}}={\xi}_{\text{vp}}^{-}+{\mathrm{\Delta \xi }}_{\text{vp}}\)
\({V}_{4}={\gamma}_{\text{vp}}={\gamma}_{\text{vp}}^{-}+{\mathrm{\Delta \gamma }}_{\text{vp}}\)
Pour le critère élastoplastique:
Si \({f}^{d}({\sigma}^{e}-{D}^{e}{\mathit{\Delta \xi }}_{\text{vp}},{\xi}_{p}^{-}+\Delta {\gamma}_{\text{vp}})\le 0\) alors: \(\Delta \gamma =\Delta {\gamma}_{p}=\Delta {\xi}_{p}=0\)
Si \({f}^{d}({\sigma}^{e}-{D}^{e}{\mathit{\Delta \epsilon }}_{\text{vp}},{\xi}_{p}^{-}+\Delta {\gamma}_{\text{vp}})>0\) alors: \(\Delta {\tilde{\epsilon}}_{p}=\mathrm{\Delta \lambda G}({\sigma}^{-},{\xi}_{p}^{-})\) avec
\(\sin(\Psi )={\mu}_{0,v}(\frac{{\sigma}_{\max}-{\sigma}_{\lim}}{{\xi}_{0,v}{\sigma}_{\max}+{\sigma}_{\lim}})\) (voir § 3.6.1 ) si \(0\le {\xi}_{p}^{-}<{\xi}_{\text{pic}}\)
\(\sin(\Psi )={\mu}_{1}(\frac{\alpha -{\alpha}_{\text{res}}}{{\xi}_{1}\alpha -{\alpha}_{\text{res}}})\) (voir § 3.6.2 ) si \({\xi}_{p}^{-}>{\xi}_{\text{pic}}\)
\(G=\frac{\partial {f}^{d}}{\partial \sigma }-(\frac{\partial {f}^{d}}{\partial \sigma }n)n\) \({\beta}^{'}\) et \(n\) sont déduits
On cherche \(\mathrm{\Delta \lambda }>0\) tel que \({f}^{d}(\sigma ,{\xi}_{p}^{-})=0\)
On déduit \(\Delta {\gamma}_{p}>0\)
Si écrouissage non couplé (contractance) \({f}^{d}({\sigma}^{e}-{D}^{e}{\mathrm{\Delta \xi }}_{\text{vp}},{\xi}_{p}^{-}+{\mathrm{\Delta \gamma }}_{\text{vp}})\le 0\) alors: \(\Delta {\xi}_{p}=\Delta {\gamma}_{p}\)
sinon écrouissage couplé (dilatance) \({f}^{d}({\sigma}^{e}-{D}^{e}{\mathit{\Delta \epsilon }}_{\text{vp}},{\xi}_{p}^{-}+\Delta {\gamma}_{\text{vp}})>0\) alors: \(\Delta {\xi}_{p}=\Delta {\gamma}_{p}+\Delta {\gamma}_{\text{vp}}\)
On complète le tableau des variables internes:
\({V}_{1}={\xi}_{p}={\xi}_{p}^{-}+{\mathrm{\Delta \xi }}_{p}\)
\({V}_{2}={\gamma}_{p}={\gamma}_{p}^{-}+{\mathrm{\Delta \gamma }}_{p}\)
Mise à jour des contraintes:
\({\mathrm{\Delta \epsilon }}^{\text{irr}}={\mathrm{\Delta \epsilon }}^{\text{vp}}+{\mathrm{\Delta \epsilon }}^{p}\)
\({\mathrm{\Delta \epsilon }}^{e}=\mathrm{\Delta \epsilon }-{\mathrm{\Delta \epsilon }}^{\text{irr}}\)
\(\mathrm{\Delta \sigma }={D}^{e}{\mathrm{\Delta \epsilon }}^{e}\)
\(\sigma ={\sigma}^{-}+\mathrm{\Delta \sigma }\)
Résumé de l’algorithme |
Vérification du fluage: * calcul de \({f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})\) * si \({f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})<0\) (Pas de fluage) \(\Delta {\xi}_{\text{vp}}=\Delta {\gamma}_{\text{vp}}=0\) \({\xi}_{\text{vp}}={\xi}_{\text{vp}}^{-}\) \({\gamma}_{\text{vp}}={\gamma}_{\text{vp}}^{-}\) * si \({f}^{\text{vp}}({\sigma}^{e},{\xi}_{\text{vp}}^{-})>0\) (fluage) calcul de \({\mathrm{\Delta \epsilon }}_{\text{vp}}\) et de \({\mathrm{\Delta \gamma }}_{\text{vp}}\) en fonction de \({\sigma}^{e}\) et de \({\xi}_{\text{vp}}^{-}\) \(\Delta {\xi}_{\text{vp}}=\min(\Delta {\gamma}_{\text{vp}},{\xi}_{v-\max}-{\xi}_{\text{vp}}^{-})\) \({\xi}_{\text{vp}}={\xi}_{\text{vp}}^{-}+{\mathrm{\Delta \xi }}_{\text{vp}}\) \({\gamma}_{\text{vp}}={\gamma}_{\text{vp}}^{-}+\Delta {\gamma}_{\text{vp}}\) * Ajustement de la prédiction élastique: \({\sigma}_{n}^{e}={\sigma}^{e}-{D}^{e}{\mathit{\Delta \epsilon }}_{\text{vp}}\) Vérification de la plasticité : * calcul de \({f}^{d}({\sigma}_{n}^{e},{\xi}_{p}^{-}+\Delta {\gamma}_{\text{vp}})\) * si \({f}^{d}({\sigma}_{n}^{e},{\xi}_{p}^{-}+\Delta {\gamma}_{\text{vp}})<0\) (Élasticité ) \(\Delta {\varepsilon}_{p}=\Delta {\gamma}_{p}=0\) \({\gamma}_{p}={\gamma}_{p}^{-}\) \({\xi}_{p}={\xi}_{p}^{-}+{\mathrm{\Delta \xi }}_{p}\) avec \(\Delta {\xi}_{p}=0\) si \(\mathit{VARV}=0\) \(\Delta {\xi}_{p}=\Delta {\gamma}_{\text{vp}}\) si \(\mathit{VARV}=1\) mise à jour des contraintes: \(\sigma ={\sigma}^{e}-{D}^{e}{\mathit{\Delta \epsilon }}_{\text{vp}}\) * si \({f}^{d}({\sigma}_{n}^{e},{\xi}_{p}^{-}+\Delta {\gamma}_{\text{vp}})>0\) (Plasticité) calcul de \(\Delta \lambda\) , \({\mathit{\Delta \gamma }}_{p}\) et \(\Delta {\varepsilon}_{p}\) \(\Delta {\xi}_{p}=\Delta {\gamma}_{p}\) si \(\mathit{VARV}=0\) \(\Delta {\varepsilon}_{p}=\Delta {\gamma}_{p}+\Delta {\gamma}_{\text{vp}}\) si \(\mathit{VARV}=1\) \({\xi}_{p}={\xi}_{p}^{-}+\Delta {\xi}_{p}\) mise à jour des contraintes: \(\sigma ={\sigma}^{-}+{D}^{e}(\Delta \varepsilon -\Delta {\varepsilon}_{\text{vp}}-\Delta {\varepsilon}_{p})\) tableau des variables internes: \(\mathit{V1}={\xi}_{p}\) \(\mathit{V2}={\gamma}_{p}\) \(\mathit{V3}={\xi}_{\text{vp}}\) \(\mathit{V4}={\gamma}_{\text{vp}}\) \(\mathit{V5}=\mathit{VARV}\) (0 si contractance ou 1 si dilatance) \(\mathit{V6}=\) indicateur de viscosité \(\mathit{V7}=\) indicateur de plasticité |
Schéma d’intégration implicite#
L’intégration du modèle LETK selon le schéma d’intégration implicite est réalisée sous environnement PLASTI . L’intégration du modèle LETK sous schéma implicite est actuellement disponible uniquement par calcul d’une matrice jacobienne locale perturbée ( “NEWTON_PERT” ).
L’algorithme de résolution suit la logique suivante. Il utilise une prédiction élastique puis des itérations de correction si les seuils visqueux et/ou plastiques sont sollicités. Le schéma a pour but de produire la variation des contraintes et variables d’écrouissage sous l’effet d’un incrément de déformation.
La subdivision locale du modèle est activable sous ce schéma d’intégration par le mot-clé ITER_INTE_PAS du mot-clé facteur COMPORTEMENT , cf [U4.51.11]).
Phase de prédiction élastique#
Cette phase est similaire à celle présentée en section 4.2.1 .
Le dépassement des seuils de plasticité et viscosité est testé par rapport à cet état de contraintes. L’expression des seuils testés est explicitée dans le § 3.2 .
Si aucun des seuils n’est sollicité, la prédiction est considérée comme valide par rapport aux modèles. Une mise à jour des variables internes est entreprise pour afficher l’état d’activation des différents seuils.
Si un seuil parmi les deux à considérer (plasticité et/ ou viscosité) est sollicité, la résolution d’un système local d’équations non linéaires doit s’initier. Les mécanismes de dissipation définis comme potentiellement actifs doivent conduire au dépassement des seuils associés (plasticité et/ou viscosité)
Phase de correction : équations non linéaires à résoudre#
Cette étape consiste à résoudre le système d’équations locales non linéaires établi sur la base des mécanismes visqueux et/ou plastique. Après convergence, les contraintes et variables internes du modèle sont mises à jour.
Les inconnues du système d’équations non linéaires sont les contraintes \({\sigma}_{n+1}\) , le multiplicateur plastique \({\lambda}_{n+1}^{p}\) , la variable d’écrouissage plastique \({\xi}_{n+1}^{p}\) et la variable d’écrouissage visqueuse \({\xi}_{n+1}^{\mathit{vp}}\) .
Le vecteur des inconuu es comporte donc au maximum pour des modélisations \(\mathrm{3D}\) 9 inconnues.
Les équations non linéaires à résoudre sont les suivantes:
L’équation d’état incrémentale, \(\mathit{E1}\) :
\({\underline{\underline{\sigma}}}_{n+1}-{\underline{\underline{\sigma}}}_{n}-{C}^{e}({\underline{\underline{\sigma}}}_{n+1}):(\Delta \underline{\underline{\epsilon}}-\Delta \lambda {\underline{\underline{G}}}^{p}-\Phi ({f}^{\mathit{vp}})\cdot {\underline{\underline{G}}}^{\mathit{vp}})=0\)
La condition de Kuhn-Tucker, \(\mathit{E2}\) :
\(\lbrace \begin{array}{cccc}\text{Si}& {f}^{d}\le 0& \text{alors}& \Delta \lambda =0\\ \text{Si}& {f}^{d}=0& \text{alors}& \Delta \lambda >0\end{array}\)
L’évolution incrémentale de la variable d’écrouissage plastiques, \(\mathit{E3}\) :
\({\xi}_{n+1}^{p}-{\xi}_{n}^{p}-\Delta {\xi}^{p}=0\) , avec \(\Delta {\xi}^{p}\) évoluant suivant les conditions précisées au § 3.4.2 .
L’évolution incrémentale de la variable d’écrouissage visco-plastique, \(\mathit{E4}\) :
\({\xi}_{n+1}^{\mathit{vp}}-{\xi}_{n}^{\mathit{vp}}-\Delta {\xi}^{\mathit{vp}}=0\) , avec \(\Delta {\xi}^{\mathit{vp}}\) évoluant suivant les conditions précisées au § 3.4.1 .
Ces équations constituent un système carré \(R(\Delta Y)\) , où les inconnues sont \(\Delta Y=(\Delta \underline{\underline{\sigma}},\Delta \lambda ,\Delta {\xi}^{p},\Delta {\xi}^{\mathit{vp}})\) . A l’itération \(j\) de la boucle de correction locale de Newton, on rés o ut l’équation matricielle suivante:
\(\frac{dR(\Delta {Y}^{j})}{d(\Delta {Y}^{j})}\cdot \delta (\Delta {Y}^{j+1})=-R(\Delta {Y}^{j})\)
La matrice jacobienne \(\frac{dR(\Delta {Y}^{j})}{d(\Delta {Y}^{j})}\) , non symétrique, se construit de la façon suivante:
\(\frac{dR(\Delta {Y}^{j})}{d(\Delta {Y}^{j})}=\left[\begin{array}{cccc}\frac{\partial \mathit{E1}}{\partial {\underline{\underline{\sigma}}}_{n+1}^{j}}& \frac{\partial \mathit{E1}}{\partial \Delta {\lambda}^{j}}& \frac{\partial \mathit{E1}}{\partial {\xi}_{p}^{j}}& \frac{\partial \mathit{E1}}{\partial {\xi}_{\mathit{vp}}^{j}}\\ \frac{\mathit{E2}}{\partial {\underline{\underline{\sigma}}}_{n+1}^{j}}& \frac{\mathit{E2}}{\partial \Delta {\lambda}^{j}}& \frac{\mathit{E2}}{\partial {\xi}_{p}^{j}}& \frac{\mathit{E2}}{\partial {\xi}_{\mathit{vp}}^{j}}\\ \frac{\mathit{E3}}{\partial {\underline{\underline{\sigma}}}_{n+1}^{j}}& \frac{\mathit{E3}}{\partial \Delta {\lambda}^{j}}& \frac{\mathit{E3}}{\partial {\xi}_{p}^{j}}& \frac{\mathit{E3}}{\partial {\xi}_{\mathit{vp}}^{j}}\\ \frac{\mathit{E4}}{\partial {\underline{\underline{\sigma}}}_{n+1}^{j}}& \frac{\mathit{E4}}{\partial \Delta {\lambda}^{j}}& \frac{\mathit{E4}}{\partial {\xi}_{p}^{j}}& \frac{\mathit{E4}}{\partial {\xi}_{\mathit{vp}}^{j}}\end{array}\right]\)
Cette matrice est aujourd’hui évaluée analytiquement ou par perturbation (ALGO_INTE = “NEWTON” ou ALGO_INTE = “NEWTON_PERT”).
Dans le but d’uniformiser les échelles entre les différentes équations à résoudre, on fait le choix de mettre à l’échelle de déformations l’équation E1 portant sur l’équation d’état incrémentale. On applique pour cela l’inverse du module de cisaillement d’élasticité non linéaire. Ce choix permet d’assurer une convergence plus uniforme sur l’ensemble du système.
La convergence est réputée acquise dès lors que \(∣∣R(\Delta {Y}^{j})∣∣<\) RESI_INTE_RELA. On s’assure également lorsque le mécanisme de plasticité est actif que le multiplicateur plastique est strictement positif. Si ce n’est pas le cas, l’intégration locale est relancée sans tenir compte du mécanisme de plasticité. Seul le mécanisme de viscosité peut alors être considéré.
Expression des termes de la matrice jacobienne#
Les termes dérivés associés à \(({R}_{1})\) sont:
\(\begin{array}{c}\frac{d{({R}_{1})}_{ij}}{d({(\Delta {Y}_{1})}_{\mathit{mn}})}={I}_{\mathit{ilkl}}-\frac{\partial {C}_{ijkl}^{e}}{\partial {\sigma}_{\mathit{mn}}}:\left[\Delta {\epsilon}_{kl}-\Delta \lambda \cdot {G}_{kl}^{p}-\Delta {\epsilon}_{kl}^{\mathit{vp}}\right]+\Delta \lambda {C}_{ijkl}^{e}:\frac{\partial {G}_{kl}^{p}}{\partial {\sigma}_{\mathit{mn}}}+\\ {C}_{ijkl}^{e}:{G}_{kl}^{\mathit{vp}}\otimes \frac{\partial ({\langle \phi ({f}^{\mathit{vp}})\rangle }^{+})}{\partial {\sigma}_{\mathit{mn}}}\Delta t+{\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}\cdot \Delta t\cdot {C}_{ijkl}^{e}:\frac{\partial {G}_{kl}^{\mathit{vp}}}{\partial {\sigma}_{\mathit{mn}}}\end{array}\)
\(\frac{d{({R}_{1})}_{ij}}{d(\Delta {Y}_{2})}={C}_{ijkl}^{e}:{G}_{kl}^{p}\)
\(\frac{d{({R}_{1})}_{ij}}{d(\Delta {Y}_{3})}=\Delta \lambda \cdot {C}_{ijkl}^{e}:\frac{\partial {G}_{kl}^{p}}{\partial {\xi}^{p}}\)
\(\frac{d{({R}_{1})}_{ij}}{d(\Delta {Y}_{4})}={C}_{ijkl}^{e}:\left[\frac{{\partial \langle \phi ({f}^{\mathit{vp}})\rangle }^{+}}{\partial {\xi}^{\mathit{vp}}}{G}_{kl}^{\mathit{vp}}+{\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}\cdot \frac{\partial {G}_{kl}^{\mathit{vp}}}{\partial {\xi}^{\mathit{vp}}}\right]\cdot \Delta t\)
Les termes dérivés associés à \(({R}_{2})\) s e distinguent suivant l’expression prise pour satisfaire la condition de Kuhn-Tucker :
Si \(({R}_{2})=\Delta \lambda\) : S i \(({R}_{2})={f}^{p}\) :
\(\frac{d({R}_{2})}{d({(\Delta {Y}_{1})}_{ij})}={0}_{ij}\) \(\frac{d({R}_{2})}{d({(\Delta {Y}_{1})}_{ij})}=\frac{\partial {f}^{p}}{\partial {\sigma}_{ij}}\)
\(\frac{d({R}_{2})}{d(\Delta {Y}_{2})}=1\) \(\frac{d({R}_{2})}{d(\Delta {Y}_{2})}=0\)
\(\frac{d({R}_{2})}{d(\Delta {Y}_{3})}=0\) \(\frac{d({R}_{2})}{d(\Delta {Y}_{3})}=\frac{\partial {f}^{p}}{\partial {\xi}^{p}}\)
\(\frac{d({R}_{2})}{d(\Delta {Y}_{4})}=0\) \(\frac{d({R}_{2})}{d(\Delta {Y}_{4})}=0\)
Les termes dérivés associés à \(({R}_{3})\) sont:
\(\frac{d({R}_{3})}{d{(\Delta {Y}_{1})}_{ij}}=-\Delta \lambda \cdot \sqrt{\frac{2}{3}}\cdot \frac{\partial {\tilde{G}}_{\mathit{II}}^{p}}{\partial {\sigma}_{ij}}\) ( cas contract ant: l’état de contraintes est en dessous du seuil caractéristique )
\(\frac{d({R}_{3})}{d{(\Delta {Y}_{1})}_{ij}}=-\Delta \lambda \cdot \sqrt{\frac{2}{3}}\cdot \frac{\partial {\tilde{G}}_{\mathit{II}}^{p}}{\partial {\sigma}_{ij}}-\sqrt{\frac{2}{3}}\cdot \Delta t\cdot \left[({\tilde{G}}_{\mathit{II}}^{\mathit{vp}}\cdot \frac{\partial {\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}}{\partial {\sigma}_{ij}}+{\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}\cdot \frac{\partial {\tilde{G}}_{\mathit{II}}^{\mathit{vp}}}{\partial {\sigma}_{ij}})\right]\) (cas dilatant: l’état de contraintes dépasse le seuil caractéristique)
\(\frac{d({R}_{3})}{d(\Delta {Y}_{2})}=-\sqrt{\frac{2}{3}}\cdot {\tilde{G}}_{\mathit{II}}^{p}\)
\(\frac{d({R}_{3})}{d(\Delta {Y}_{3})}=1-\Delta \lambda \cdot \sqrt{\frac{2}{3}}\cdot \frac{\partial {\tilde{G}}_{\mathit{II}}^{p}}{\partial {\xi}^{p}}\)
\(\frac{d({R}_{3})}{d(\Delta {Y}_{4})}=-\sqrt{\frac{2}{3}}\cdot \Delta t\cdot (\frac{\partial {\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}}{{\xi}^{\mathit{vp}}}\cdot {\tilde{G}}_{\mathit{II}}^{\mathit{vp}}+{\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}\cdot \frac{\partial {\tilde{G}}_{\mathit{II}}^{\mathit{vp}}}{{\xi}^{\mathit{vp}}})\) (cas dilatant: l’état de contraintes dépasse le seuil caractéristique)
Les termes dérivés associés à \(({R}_{4})\) sont:
\(\frac{d({R}_{4})}{d{(\Delta {Y}_{1})}_{ij}}=-\sqrt{\frac{2}{3}}\cdot \Delta t\cdot (\frac{\partial {\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}}{{\sigma}_{ij}}\cdot {\tilde{G}}_{\mathit{II}}^{\mathit{vp}}+{\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}\cdot \frac{\partial {\tilde{G}}_{\mathit{II}}^{\mathit{vp}}}{{\sigma}_{ij}})\) si \({\dot{\gamma}}^{\mathit{vp}}\le {\xi}_{\max}^{\mathit{vp}}-{\xi}^{\mathit{vp}}({t}^{-})\)
\(\frac{d({R}_{4})}{d(\Delta {Y}_{2})}=0\)
\(\frac{d({R}_{4})}{d(\Delta {Y}_{3})}=0\)
\(\frac{d({R}_{4})}{d(\Delta {Y}_{4})}=1-\sqrt{\frac{2}{3}}\cdot \Delta t\cdot (\frac{\partial {\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}}{{\xi}^{\mathit{vp}}}\cdot {\tilde{G}}_{\mathit{II}}^{\mathit{vp}}+{\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}\cdot \frac{\partial {\tilde{G}}_{\mathit{II}}^{\mathit{vp}}}{{\xi}^{\mathit{vp}}})\)
L’expression détaillée de l’ensemble des termes mis en jeu dépend des dérivées principales suivantes:
\(\frac{d{C}_{ijkl}^{e}}{d{\sigma}_{\mathit{mn}}}\) ; \(\frac{d{G}_{ij}^{p}}{d{\sigma}_{kl}}\) ; \(\frac{d{\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}}{d{\sigma}_{ij}}\) ; \(\frac{d{G}_{ij}^{\mathit{vp}}}{d{\sigma}_{kl}}\) ; \(\frac{d{\tilde{G}}_{\mathit{II}}^{p}}{d{\sigma}_{ij}}\) ; \(\frac{d{\tilde{G}}_{\mathit{II}}^{\mathit{vp}}}{d{\sigma}_{ij}}\) ;
\(\frac{d{G}_{ij}^{p}}{d{\xi}^{p}}\) ; \(\frac{d{\tilde{G}}_{\mathit{II}}^{p}}{d{\xi}^{p}}\) ;
\(\frac{d{\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}}{d{\xi}^{\mathit{vp}}}\) ; \(\frac{d{G}_{ij}^{\mathit{vp}}}{d{\xi}^{\mathit{vp}}}\) ; \(\frac{d{\tilde{G}}_{\mathit{II}}^{\mathit{vp}}}{d{\xi}^{\mathit{vp}}}\) .
Les quantités mentionnées ci-dessus sont présentées en annexe du document.
Phase de mise à jour#
La mise à jour du vecteur solution est réalisée selon l’opération suivante:
\(\Delta Y=\Delta {Y}^{j+1}=\Delta {Y}^{j}+\delta \Delta {Y}^{j+1}\)
Cette phase de mise à jour consiste à reporter l’évolution des contraintes, déformations plastiques, déformations visco-plastiques et paramètres d’écrouissage plastique et visco-plastique.
Opérateur tangent en vitesse#
L’opérateur tangent en vitesse a d’ores et déjà été présenté dans le cadre du schéma d’intégration explicite. Cet opérateur de rigidité est utilisé lors des prédictions à l’échelle globale de Newton-Raphson en matrice tangente ( PREDICTION=”TANGENTE” ). Les sources fortran associées à la onstruction de cet opérateur sont communes aux deux schémas d’intégration ( ALGO_INTE = (“NEWTON”,”SPECIFIQUE”) ) .
Opérateur tangent consistant#
Sur la base des développements analytiques précisés dans le document [R5.03.12], il est possible de déterminer l’opérateur tangent \({M}_{c}=\frac{\partial \sigma }{\partial \epsilon }\) à partir des termes de la matrice jacobienne définie ci-dessus, § 4.3.2 ( \(J=\frac{dR}{dY}\) ).
En effet, le système \(\Phi (\Delta Y)=0\) est vérifié en fin d’incrément et pour une petite variation de \(\Phi\) , en considérant cette fois \(\epsilon\) comme une variable, le système reste à l’équilibre et donc on vérifie \(d\Phi =0\) .
Par différenciation, on obtient:
\(\frac{\partial \Phi }{\partial \Delta \epsilon }d(\Delta \epsilon )+\frac{\partial \Phi }{\partial \Delta \sigma }d(\Delta \sigma )+\frac{\partial \Phi }{\partial \Delta \lambda }d(\Delta \lambda )+\frac{\partial \Phi }{\partial \Delta {\xi}_{p}}d(\Delta {\xi}_{p})+\frac{\partial \Phi }{\partial \Delta {\xi}_{\mathit{vp}}}d(\Delta {\xi}_{\mathit{vp}})=0\)
On ré-écrit le système en mettant les termes en \(\epsilon\) dans le membre de droite:
\(\frac{\partial \Phi }{\partial \Delta \epsilon }d(\Delta \epsilon )+\frac{\partial \Phi }{\partial \Delta \sigma }d(\Delta \sigma )+\frac{\partial \Phi }{\partial \Delta \lambda }d(\Delta \lambda )+\frac{\partial \Phi }{\partial \Delta {\xi}_{p}}d(\Delta {\xi}_{p})=-\frac{\partial \Phi }{\partial \Delta {\xi}_{\mathit{vp}}}d(\Delta {\xi}_{\mathit{vp}})\)
Ce système peut alors s’écrire sous la forme suivante:
\(J\cdot d(\Delta Y)=-\frac{\partial \Phi }{\partial (\Delta \epsilon )}d(\Delta \epsilon )\) avec \(\frac{\partial \Phi }{\partial (\Delta \epsilon )}=\left\lbrace -{C}^{e}(\sigma ),0,0,0\right\rbrace\)
Finalement, on obtient: \(J\cdot d(\Delta Y)=\left\lbrace {C}^{e}(\sigma ):\Delta \epsilon ,0,0,0\right\rbrace\)
On écrit ensuite le système par blocs en séparant \(d(\Delta \sigma )\) des autres variables \(Z=(\Delta \lambda ,\Delta {\xi}_{p},\Delta {\xi}_{\mathit{vp}})\) , ce qui donne:
\(\left[\begin{array}{cc}{J}_{\sigma \sigma }& {J}_{\sigma Z}\\ {J}_{Z\sigma }& {J}_{\mathit{ZZ}}\end{array}\right]\cdot (\begin{array}{c}\Delta \sigma \\ Z\end{array})=(\begin{array}{c}{C}^{e}(\sigma )d(\Delta \epsilon )\\ 0\end{array})\)
L’expression de l’opérateur tangent devient:
\({M}_{c}=\frac{\partial \sigma }{\partial \epsilon }=\frac{d(\Delta \sigma )}{d(\Delta \epsilon )}={\left[{J}_{\sigma \sigma }-{J}_{\sigma Z}{({J}_{\mathit{ZZ}})}^{-1}{J}_{Z\sigma }\right]}^{-1}{C}^{e}(\sigma )\)
Remarque : La matrice Jacobienne n’étant pas symétrique, l’opérateur tangent \({M}_{c}\) ne l’est pas non plus.
Références#
R1. Le modèle «L&K» pour Code_Aster. IH-HAVL-SIO-00015-A.
R2. Le modèle «L&K» pour Code_Aster. IH-HAVL-SIO-00015-B.
R3. Réunion sur le modèle viscoplastique L&K du CIH simplifié pour Code_Aster.CR-AMA-2007-142.
R4. Modélisation numérique du comportement des ouvrages souterrains par une approche viscoplastique. Thèse présentée à l’INPL par A. Kleine, novembre 2007.
Fonctionnalités et vérification#
Ce document concerne la loi de comportement LETK (mot clé COMPORTEMENT de STAT_NON_LINE) et le matériau associé LETK (commande DEFI_MATERIAU).
Ce comportement est vérifié par les deux cas tests:
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
9.2 |
J.El-Gharib, C.Chavant, EDF-R&D/AMA F.Laigle, A.Kleine EDF-CIH |
Texte initial |
11.2 |
A.Foucault |
Algorithme d’intégration par schéma implicite |
11.3 |
A.Foucault |
Développement analytique de la matrice jacobienne DR/DY |
Annexes : Termes de la matrice jacobienne#
Évaluation des termes relatifs à \(\frac{d{({R}_{1})}_{ij}}{d({(\Delta {Y}_{1})}_{\mathit{mn}})}\) :
\(\begin{array}{c}\frac{d{({R}_{1})}_{ij}}{d({(\Delta {Y}_{1})}_{\mathit{mn}})}={I}_{\mathit{ilkl}}-\frac{\partial {C}_{ijkl}^{e}}{\partial {\sigma}_{\mathit{mn}}}:\left[\Delta {\epsilon}_{kl}-\Delta \lambda \cdot {G}_{kl}^{p}-\Delta {\epsilon}_{kl}^{\mathit{vp}}\right]+\Delta \lambda {C}_{ijkl}^{e}:\frac{\partial {G}_{kl}^{p}}{\partial {\sigma}_{\mathit{mn}}}+\\ {C}_{ijkl}^{e}:{G}_{kl}^{\mathit{vp}}\otimes \frac{\partial ({\langle \phi ({f}^{\mathit{vp}})\rangle }^{+})}{\partial {\sigma}_{\mathit{mn}}}\Delta t+{\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}\cdot \Delta t\cdot {C}_{ijkl}^{e}:\frac{\partial {G}_{kl}^{\mathit{vp}}}{\partial {\sigma}_{\mathit{mn}}}\end{array}\)
\(\frac{\partial {C}_{ijkl}^{e}}{\partial {\sigma}_{\mathit{mn}}}=\frac{{n}_{\mathit{elas}}}{{I}_{1}}\cdot {C}_{ijkl}^{e}\otimes {\delta}_{\mathit{mn}}\)
\(\frac{\partial {G}_{ij}^{p}}{\partial {\sigma}_{kl}}=\frac{\partial}{{\sigma}_{kl}}(\frac{\partial {f}^{p}}{\partial {\sigma}_{ij}})-(\frac{\partial}{{\sigma}_{kl}}(\frac{\partial {f}^{p}}{\partial {\sigma}_{ij}}):{n}_{\mathit{mn}})\otimes {n}_{ij}-(\frac{\partial {f}^{p}}{\partial {\sigma}_{\mathit{mn}}}:\frac{\partial {n}_{\mathit{mn}}}{\partial {\sigma}_{kl}})\otimes {n}_{ij}-(\frac{\partial {f}^{p}}{\partial {\sigma}_{\mathit{mn}}}:{n}_{\mathit{mn}})\cdot \frac{\partial {n}_{ij}}{\partial {\sigma}_{kl}}\)
avec \(\begin{array}{}\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}=\\ \frac{\partial ({s}_{\text{II}}H(\theta ))}{\partial {\sigma}_{ij}}-{a}^{d}({\xi}_{p}){\sigma}_{c}{H}_{0}^{c}{\left[{A}^{d}({\xi}_{p}){s}_{\text{II}}H(\theta )+{B}^{d}({\xi}_{p}){I}_{1}+{D}^{d}({\xi}_{p})\right]}^{{a}^{d}({\xi}_{p})-1}\\ ({A}^{d}({\xi}_{p})\frac{\partial ({s}_{\text{II}}H(\theta ))}{\partial {\sigma}_{ij}}+{B}^{d}({\xi}_{p}){I}_{d})\end{array}\) soit
\(\begin{array}{c}\frac{\partial}{{\sigma}_{kl}}(\frac{\partial {f}^{p}}{\partial {\sigma}_{ij}})=\frac{\partial}{\partial {\sigma}_{kl}}(\frac{\partial {s}_{\mathit{II}}H(\theta )}{\partial {\sigma}_{ij}})-{a}^{d}({\xi}^{p}){\sigma}_{c}{H}_{0}^{c}{\left[{A}^{d}({\xi}^{p}){s}_{\mathit{II}}H(\theta )+{B}^{d}({\xi}^{p}){I}_{1}+{D}^{d}({\xi}^{p})\right]}^{{a}^{d}({\xi}^{p})-1}\\ \cdot {A}^{d}({\xi}^{p})\frac{\partial}{\partial {\sigma}_{kl}}(\frac{\partial {s}_{\mathit{II}}H(\theta )}{\partial {\sigma}_{ij}})-{a}^{d}({\xi}^{p})({a}^{d}({\xi}^{p})-1){\sigma}_{c}{H}_{0}^{c}{({A}^{d}({\xi}^{p}){s}_{\mathit{II}}H(\theta )+{B}^{d}({\xi}^{p}){I}_{1}+{D}^{d}({\xi}^{p}))}^{{a}^{d}({\xi}^{p})-2}\\ ({A}^{d}({\xi}^{p})\frac{\partial {s}_{\mathit{II}}H(\theta )}{\partial {\sigma}_{ij}}+{B}^{d}({\xi}^{p}){\delta}_{ij})\otimes ({A}^{d}({\xi}^{p})\frac{\partial {s}_{\mathit{II}}H(\theta )}{\partial {\sigma}_{kl}}+{B}^{d}({\xi}^{p}){\delta}_{kl})\end{array}\)
Or \(\frac{\partial ({s}_{\text{II}}H(\theta ))}{\partial {\sigma}_{ij}}=((\frac{{H}_{0}^{c}-{H}_{0}^{e}}{{h}_{0}^{c}-{h}_{0}^{e}})\frac{\partial h(\theta )}{\partial {s}_{kl}}{s}_{\text{II}}+H(\theta )\frac{{s}_{kl}}{{s}_{\text{II}}}).({\delta}_{\text{ik}}.{\delta}_{\text{jl}}-\frac{1}{3}{\delta}_{ij}.{\delta}_{kl})\) d’où
\(\begin{array}{c}\frac{\partial}{\partial {\sigma}_{kl}}(\frac{\partial {s}_{\mathit{II}}H(\theta )}{\partial {\sigma}_{ij}})=(\frac{{H}_{0}^{c}-{H}_{0}^{e}}{{h}_{0}^{c}-{h}_{0}^{e}})\frac{\partial}{\partial {\sigma}_{kl}}(\frac{\partial h(\theta )}{\partial {s}_{\mathit{mn}}}){s}_{\mathit{II}}\frac{\partial {s}_{\mathit{mn}}}{\partial {\sigma}_{ij}}+(\frac{{H}_{0}^{c}-{H}_{0}^{e}}{{h}_{0}^{c}-{h}_{0}^{e}})\frac{\partial h(\theta )}{\partial {s}_{\mathit{mn}}}\frac{\partial {s}_{\mathit{mn}}}{\partial {\sigma}_{ij}}\frac{\partial {s}_{\mathit{II}}}{\partial {s}_{\mathit{pq}}}\frac{\partial {s}_{\mathit{pq}}}{\partial {\sigma}_{kl}}+\\ \frac{\partial H(\theta )}{\partial {\sigma}_{kl}}\frac{{s}_{\mathit{mn}}}{{s}_{\mathit{II}}}\frac{\partial {s}_{\mathit{mn}}}{\partial {\sigma}_{ij}}+\frac{H(\theta )}{{s}_{\mathit{II}}}\frac{\partial {s}_{\mathit{mn}}}{\partial {\sigma}_{kl}}\frac{\partial {s}_{\mathit{mn}}}{\partial {\sigma}_{ij}}-\frac{H(\theta ){s}_{\mathit{mn}}}{{s}_{\mathit{II}}^{2}}\frac{\partial {s}_{\mathit{II}}}{\partial {s}_{\mathit{pq}}}\frac{\partial {s}_{\mathit{pq}}}{\partial {\sigma}_{kl}}\frac{\partial {s}_{\mathit{mn}}}{\partial {\sigma}_{ij}}\end{array}\)
On a de plus \(\frac{\partial h(\theta )}{\partial {s}_{kl}}=\frac{\gamma \cos(\mathrm{3\theta })}{\mathrm{6h}{(\theta )}^{5}}\frac{{\mathrm{3s}}_{kl}}{{s}_{\text{II}}^{2}}-\frac{\gamma \sqrt{54}}{\mathrm{6h}{(\theta )}^{5}{s}_{\text{II}}^{3}}(\frac{\partial \det(\underline{\underline{s}})}{\partial {s}_{kl}})\)
\(\frac{\partial}{\partial {\sigma}_{kl}}(\frac{\partial h(\theta )}{\partial {s}_{\mathit{mn}}})=\frac{\partial}{\partial {s}_{\mathit{pq}}}(\frac{\partial h(\theta )}{\partial {s}_{\mathit{mn}}})\frac{\partial {s}_{\mathit{pq}}}{\partial {\sigma}_{kl}}\)
\(\begin{array}{c}\frac{\partial}{\partial {s}_{\mathit{pq}}}(\frac{\partial h(\theta )}{\partial {s}_{\mathit{mn}}})=\frac{\sqrt{54}\gamma }{2{h}^{5}(\theta ){s}_{\mathit{II}}^{5}}{s}_{\mathit{mn}}\otimes \frac{\partial det({s}_{ij})}{\partial {s}_{\mathit{pq}}}-\frac{3\gamma \sqrt{54}det({s}_{ij})}{2{h}^{5}(\theta ){s}_{\mathit{II}}^{7}}{s}_{\mathit{mn}}\otimes {s}_{\mathit{pq}}+\frac{\gamma \cos3\theta }{2{h}^{5}(\theta ){s}_{\mathit{II}}^{2}}{I}_{\mathit{mnpq}}-\\ \frac{\gamma \cos3\theta }{{h}^{5}(\theta ){s}_{\mathit{II}}^{4}}{s}_{\mathit{mn}}\otimes {s}_{\mathit{pq}}-\frac{5\gamma \cos3\theta }{2{h}^{6}(\theta ){s}_{\mathit{II}}^{2}}{s}_{\mathit{mn}}\otimes \frac{\partial h(\theta )}{\partial {s}_{\mathit{pq}}}+\frac{5\gamma \sqrt{54}}{6{s}_{\mathit{II}}^{3}{h}^{6}(\theta )}\frac{\partial det({s}_{ij})}{\partial {s}_{\mathit{mn}}}\otimes \frac{\partial h(\theta )}{\partial {s}_{\mathit{pq}}}+\\ \frac{\gamma \sqrt{54}}{2{h}^{5}(\theta ){s}_{\mathit{II}}^{5}}\frac{\partial det({s}_{ij})}{\partial {s}_{\mathit{mn}}}\otimes {s}_{\mathit{pq}}-\frac{\gamma \sqrt{54}}{6{h}^{5}(\theta ){s}_{\mathit{II}}^{3}}\frac{{\partial}^{2}det({s}_{ij})}{\partial {s}_{\mathit{mn}}\partial {s}_{\mathit{pq}}}\end{array}\)
avec
\(\frac{{\partial}^{2}det({s}_{ij})}{\partial {s}_{\mathit{mn}}\partial {s}_{\mathit{pq}}}=\left[\begin{array}{cccccc}0& {s}_{33}& {s}_{22}& 0& 0& -\sqrt{2}{s}_{23}\\ {s}_{33}& 0& {s}_{11}& 0& -\sqrt{2}{s}_{13}& 0\\ {s}_{22}& {s}_{11}& 0& -\sqrt{2}{s}_{12}& 0& 0\\ 0& 0& -\sqrt{2}{s}_{12}& -{s}_{33}& {s}_{13}& {s}_{23}\\ 0& -\sqrt{2}{s}_{13}& 0& {s}_{13}& -{s}_{11}& {s}_{12}\\ -\sqrt{2}{s}_{23}& 0& 0& {s}_{23}& {s}_{12}& -{s}_{22}\end{array}\right]\)
On rappelle que \({n}_{ij}=\frac{{\beta}^{'}\frac{{s}_{ij}}{{s}_{\text{II}}}-{\delta}_{ij}}{\sqrt{{\beta}^{'2}+3}}\) et \({\beta}^{'}=-\frac{2\sqrt{6}\sin(\Psi )}{3-\sin(\Psi )}\)
\(\frac{\partial {n}_{ij}}{\partial {\sigma}_{kl}}=\frac{\left[\frac{\partial {\beta}^{'}}{\partial {\sigma}_{kl}}\frac{{s}_{ij}}{{s}_{\mathit{II}}}+\frac{{\beta}^{'}}{{s}_{\mathit{II}}}\frac{\partial {s}_{ij}}{\partial {\sigma}_{kl}}-\frac{{\beta}^{'}{s}_{ij}}{{s}_{\mathit{II}}^{2}}\frac{\partial {s}_{\mathit{II}}}{\partial {\sigma}_{kl}}\right]({\beta}^{\text{'2}}+3)-{\beta}^{'}({\beta}^{'}\frac{{s}_{ij}}{{s}_{\mathit{II}}}-{\delta}_{ij})\otimes \frac{\partial {\beta}^{'}}{\partial {\sigma}_{kl}}}{({\beta}^{\text{'2}}+3)\sqrt{{\beta}^{\text{'2}}+3}}\)
\(\frac{\partial {\beta}^{'}}{\partial {\sigma}_{kl}}=\frac{\partial {\beta}^{'}}{\partial {s}_{\mathit{mn}}}\frac{\partial {s}_{\mathit{mn}}}{\partial {\sigma}_{kl}}+\frac{\partial {\beta}^{'}}{\partial {I}_{1}}\frac{\partial {I}_{1}}{\partial {\sigma}_{kl}}\)
\(\frac{\partial {\beta}^{'}}{\partial {s}_{\mathit{mn}}}=\frac{-6\sqrt{6}}{{(3-\sin\psi )}^{2}}\frac{\partial \sin\psi }{\partial {s}_{\mathit{mn}}}\) et \(\frac{\partial {\beta}^{'}}{\partial {I}_{1}}=\frac{-6\sqrt{6}}{{(3-\sin\psi )}^{2}}\frac{\partial \sin\psi }{\partial {I}_{1}}\)
Distinction des expressions entre le comportement pré-pic ou visco-plastique et post-pic
Expression des dérivées en pré-pic ou visco-plastique
\(\begin{array}{ccc}\frac{\partial \sin\psi }{\partial {s}_{\mathit{mn}}}& =& \frac{\partial \sin\psi }{\partial {\sigma}_{max}}\frac{\partial {\sigma}_{max}}{\partial {s}_{\mathit{mn}}}+\frac{\partial \sin\psi }{\partial {\sigma}_{\lim}}\frac{\partial {\sigma}_{\lim}}{\partial {s}_{\mathit{mn}}}\\ & =& {\mu}_{0,v}(\frac{(1+{\xi}_{\text{0,v}}){\sigma}_{\lim}}{{({\xi}_{\text{0,v}}{\sigma}_{max}+{\sigma}_{\lim})}^{2}}\frac{\partial {\sigma}_{max}}{\partial {s}_{\mathit{mn}}}-\frac{(1+{\xi}_{\text{0,v}}){\sigma}_{\max}}{{({\xi}_{\text{0,v}}{\sigma}_{max}+{\sigma}_{\lim})}^{2}}\frac{\partial {\sigma}_{\lim}}{\partial {s}_{\mathit{mn}}})\end{array}\)
et
\(\begin{array}{ccc}\frac{\partial \sin\psi }{\partial {I}_{1}}& =& \frac{\partial \sin\psi }{\partial {\sigma}_{max}}\frac{\partial {\sigma}_{max}}{\partial {I}_{1}}+\frac{\partial \sin\psi }{\partial {\sigma}_{\lim}}\frac{\partial {\sigma}_{\lim}}{\partial {I}_{1}}\\ & =& \frac{{\mu}_{0,v}}{3}(\frac{(1+{\xi}_{\text{0,v}}){\sigma}_{\lim}}{{({\xi}_{\text{0,v}}{\sigma}_{max}+{\sigma}_{\lim})}^{2}}-\frac{(1+{m}_{\text{v,max}})(1+{\xi}_{\text{0,v}}){\sigma}_{\max}}{{({\xi}_{\text{0,v}}{\sigma}_{max}+{\sigma}_{\lim})}^{2}})\end{array}\)
\(\frac{\partial {\sigma}_{max}}{\partial {s}_{\mathit{mn}}}=\frac{1}{\sqrt{6}}\left[\frac{{s}_{\mathit{II}}}{{H}_{0}^{c}-{H}_{0}^{e}}\frac{\partial H(\theta )}{\partial {s}_{\mathit{mn}}}+(\frac{3}{2}+\frac{2H(\theta )-({H}_{0}^{c}+{H}_{0}^{e})}{2({H}_{0}^{c}-{H}_{0}^{e})})\frac{{s}_{\mathit{mn}}}{{s}_{\mathit{II}}}\right]\) et \(\frac{\partial {\sigma}_{max}}{\partial {I}_{1}}=\frac{1}{3}\)
\(\frac{\partial {\sigma}_{\lim}}{\partial {s}_{\mathit{mn}}}=\frac{(1+{m}_{\text{v,max}})}{\sqrt{6}}\left[\frac{{s}_{\mathit{II}}}{{H}_{0}^{c}-{H}_{0}^{e}}\frac{\partial H(\theta )}{\partial {s}_{\mathit{mn}}}-(\frac{3}{2}-\frac{2H(\theta )-({H}_{0}^{c}+{H}_{0}^{e})}{2({H}_{0}^{c}-{H}_{0}^{e})})\frac{{s}_{\mathit{mn}}}{{s}_{\mathit{II}}}\right]\) et \(\frac{\partial {\sigma}_{\lim}}{\partial {I}_{1}}=\frac{(1+{m}_{\text{v,max}})}{3}\)
Expression des dérivées en post-pic pour la loi de dilatance plastique
\(\frac{\partial \sin\psi }{\partial {s}_{\mathit{mn}}}=\frac{\partial \sin\psi }{\partial \alpha }(\frac{\partial \alpha }{\partial {\sigma}_{min}}\frac{\partial {\sigma}_{min}}{\partial {s}_{\mathit{mn}}}+\frac{\partial \alpha }{\partial {\sigma}_{max}}\frac{\partial {\sigma}_{max}}{\partial {s}_{\mathit{mn}}})\)
et
\(\frac{\partial \sin\psi }{\partial {I}_{1}}=\frac{\partial \sin\psi }{\partial \alpha }(\frac{\partial \alpha }{\partial {\sigma}_{min}}\frac{\partial {\sigma}_{min}}{\partial {I}_{1}}+\frac{\partial \alpha }{\partial {\sigma}_{max}}\frac{\partial {\sigma}_{max}}{\partial {I}_{1}})\)
\(\frac{\partial \sin\psi }{\partial {s}_{\mathit{mn}}}={\mu}_{1}\frac{(1+{\xi}_{1}){\alpha}_{\mathit{res}}}{{({\xi}_{1}\alpha +{\alpha}_{\mathit{res}})}^{2}}(-\frac{{\sigma}_{max}+\tilde{\sigma}}{{({\sigma}_{min}+\tilde{\sigma})}^{2}}\frac{\partial {\sigma}_{min}}{\partial {s}_{\mathit{mn}}}+\frac{1}{{\sigma}_{min}+\tilde{\sigma}}\frac{\partial {\sigma}_{max}}{\partial {s}_{\mathit{mn}}})\)
et
\(\frac{\partial \sin\psi }{\partial {I}_{1}}=\frac{{\mu}_{1}{\alpha}_{\mathit{res}}(1+{\xi}_{1})({\sigma}_{min}-{\sigma}_{max})}{3{({\xi}_{1}\alpha +{\alpha}_{\mathit{res}})}^{2}{({\sigma}_{min}+\tilde{\sigma})}^{2}}\)
\(\frac{\partial {\sigma}_{min}}{\partial {s}_{\mathit{mn}}}=\frac{1}{\sqrt{6}}\left[\frac{{s}_{\mathit{II}}}{{H}_{0}^{c}-{H}_{0}^{e}}\frac{\partial H(\theta )}{\partial {s}_{\mathit{mn}}}-(\frac{3}{2}-\frac{2H(\theta )-({H}_{0}^{c}+{H}_{0}^{e})}{2({H}_{0}^{c}-{H}_{0}^{e})})\frac{{s}_{\mathit{mn}}}{{s}_{\mathit{II}}}\right]\) et \(\frac{\partial {\sigma}_{min}}{\partial {I}_{1}}=\frac{1}{3}\)
L’évaluation du terme \(\frac{\partial {G}_{ij}^{\mathit{vp}}}{\partial {\sigma}_{kl}}\) est identique à celle de \(\frac{\partial {G}_{ij}^{p}}{\partial {\sigma}_{kl}}\) aux distinctions près déjà précisées ci-dessus.
On aborde à présent l’évaluation du terme \(\frac{\partial ({\langle \phi ({f}^{\mathit{vp}})\rangle }^{+})}{\partial {\sigma}_{\mathit{mn}}}\) avec \(\Phi ({f}^{\text{vp}})={A}_{v}{(\frac{{f}^{\text{vp}}}{\text{Pa}})}^{{n}_{v}}\) .
On obtient alors:
\(\frac{\partial ({\langle \phi ({f}^{\mathit{vp}})\rangle }^{+})}{\partial {\sigma}_{\mathit{mn}}}=\frac{\partial {f}^{\mathit{vp}}}{\partial {\sigma}_{\mathit{mn}}}\cdot \frac{{A}_{v}{n}_{v}}{{P}_{\text{atm}}}{(\frac{{f}^{\mathit{vp}}}{{P}_{\text{atm}}})}^{{n}_{v}-1}\)
Évaluation des termes relatifs à \(\frac{d{({R}_{1})}_{ij}}{d(\Delta {Y}_{3})}=\Delta \lambda \cdot {C}_{ijkl}^{e}:\frac{\partial {G}_{kl}^{p}}{\partial {\xi}^{p}}\) :
\(\frac{\partial {G}_{ij}^{p}}{\partial {\xi}^{p}}=\frac{\partial}{{\xi}^{p}}(\frac{\partial {f}^{p}}{\partial {\sigma}_{ij}})-(\frac{\partial}{{\xi}^{p}}(\frac{\partial {f}^{p}}{\partial {\sigma}_{ij}}):{n}_{\mathit{mn}})\otimes {n}_{ij}-(\frac{\partial {f}^{p}}{\partial {\sigma}_{\mathit{mn}}}:\frac{\partial {n}_{\mathit{mn}}}{\partial {\xi}^{p}})\otimes {n}_{ij}-(\frac{\partial {f}^{p}}{\partial {\sigma}_{\mathit{mn}}}:{n}_{\mathit{mn}})\cdot \frac{\partial {n}_{ij}}{\partial {\xi}^{p}}\)
avec
\(\begin{array}{c}\frac{\partial}{{\xi}^{p}}(\frac{\partial {f}^{p}}{\partial {\sigma}_{ij}})=\frac{\partial {a}^{d}}{\partial {\xi}^{p}}{\sigma}_{c}{H}_{0}^{c}{({A}^{d}{s}_{\mathit{II}}H(\theta )+{B}^{d}{I}_{1}+{D}^{d})}^{{a}^{d}-1}\cdot ({A}^{d}\frac{\partial ({s}_{\mathit{II}}H(\theta ))}{\partial {\sigma}_{ij}}+{B}^{d}{\delta}_{ij})\\ -{a}^{d}{\sigma}_{c}{H}_{0}^{c}\lbrace \frac{\partial {a}^{d}}{{\xi}^{p}}\ln({A}^{d}{s}_{\mathit{II}}H(\theta )+{B}^{d}{I}_{1}+{D}^{d})\mathrm{...}\\ \mathrm{...}+\frac{({a}^{d}-1)}{{A}^{d}{s}_{\mathit{II}}H(\theta )+{B}^{d}{I}_{1}+{D}^{d}}(\frac{\partial {A}^{d}}{\partial {\xi}^{p}}{s}_{\mathit{II}}H(\theta )+\frac{\partial {B}^{d}}{\partial {\xi}^{p}}{I}_{1}+\frac{\partial {D}^{d}}{\partial {\xi}^{p}})\rbrace \cdot \\ {({A}^{d}{s}_{\mathit{II}}H(\theta )+{B}^{d}{I}_{1}+{D}^{d})}^{{a}^{d}-1}\left[{A}^{d}\frac{\partial ({s}_{\mathit{II}}H(\theta ))}{\partial {\sigma}_{ij}}+{B}^{d}{\delta}_{ij}\right]\\ -{a}^{d}{\sigma}_{c}{H}_{0}^{c}{\left[{A}^{d}{s}_{\mathit{II}}H(\theta )+{B}^{d}{I}_{1}+{D}^{d}\right]}^{{a}^{d}-1}\cdot (\frac{\partial {A}^{d}}{\partial {\xi}^{p}}\frac{\partial ({s}_{\mathit{II}}H(\theta ))}{{\sigma}_{ij}}+\frac{\partial {B}^{d}}{\partial {\xi}^{p}})\end{array}\)
et
\(\begin{array}{ccc}\frac{\partial {n}_{kl}}{{\xi}^{p}}& =& \frac{\partial {n}_{kl}}{\partial \beta '}\frac{\partial \beta '}{\partial {\xi}^{p}}\\ & =& \frac{(\frac{{s}_{kl}}{{s}_{\mathit{II}}}(\beta {'}^{2}+3)-2\beta {'}^{2}\frac{{s}_{kl}}{{s}_{\mathit{II}}}+2\beta '{\delta}_{kl})}{{(\beta {'}^{2}+3)}^{3/2}}\frac{\partial \beta '}{\partial {\xi}^{p}}\\ & =& \frac{(\frac{{s}_{kl}}{{s}_{\mathit{II}}}(\beta {'}^{2}+3)-2\beta {'}^{2}\frac{{s}_{kl}}{{s}_{\mathit{II}}}+2\beta '{\delta}_{kl})}{{(\beta {'}^{2}+3)}^{3/2}}\frac{-6\sqrt{6}\sin\psi }{{(3-\sin\psi )}^{2}}\frac{\partial \sin\psi }{\partial {\xi}^{p}}\end{array}\)
si la loi de dilatance suivie correspond au domaine pré-pic, \(\frac{\partial \sin\psi }{\partial {\xi}^{p}}=0\)
si la loi de dilatance suivie correspond au domaine post-pic, les opérations suivantes sont nécessaires:
\(\begin{array}{ccc}\frac{\partial \sin\psi }{\partial {\xi}^{p}}& =& \frac{\partial \sin\psi }{\partial \alpha }\frac{\partial \alpha }{\partial {\xi}^{p}}\\ & =& {\mu}_{1}\frac{(1+{\xi}_{1}){\alpha}_{\text{res}}}{{({\xi}_{1}\alpha +{\alpha}_{\text{res}})}^{2}}\frac{\partial \alpha }{\partial {\xi}^{p}}\\ & =& {\mu}_{1}\frac{(1+{\xi}_{1}){\alpha}_{\text{res}}}{{({\xi}_{1}\alpha +{\alpha}_{\text{res}})}^{2}}\frac{({\sigma}_{\min}-{\sigma}_{\max})}{{({\sigma}_{\min}+\tilde{\sigma})}^{2}}\frac{\partial \tilde{\sigma}}{\partial {\xi}^{p}}\end{array}\)
\(\begin{array}{ccc}\frac{\partial \tilde{\sigma}}{\partial {\xi}^{p}}& =& \frac{\partial \tilde{\sigma}}{\partial \tilde{c}}\frac{\partial \tilde{c}}{\partial {\xi}^{p}}+\frac{\partial \tilde{\sigma}}{\partial \tan(\phi )}\frac{\partial \tan(\phi )}{\partial {\xi}^{p}}\\ & =& \frac{1}{\tan(\phi )}\frac{\partial \tilde{c}}{\partial {\xi}^{p}}-\frac{\tilde{c}}{\tan{(\phi )}^{2}}\frac{\partial \tan(\phi )}{\partial {\xi}^{p}}\end{array}\)
avec
\(\begin{array}{c}\frac{\partial \tilde{c}}{\partial {\xi}^{p}}=\frac{({\sigma}_{c}{({s}^{d})}^{{a}^{d}}\left[\frac{\partial {a}^{d}}{\partial {\xi}^{p}}\ln({s}^{d})+\frac{{a}^{d}}{{s}^{d}}\frac{\partial {s}^{d}}{\partial {\xi}^{p}}\right])}{2\sqrt{1+{a}^{d}{m}^{d}{({s}^{d})}^{{a}^{d}-1}}}+\mathrm{...}\\ \mathrm{...}\frac{{\sigma}_{c}{({s}^{d})}^{{a}^{d}}(\frac{\partial {a}^{d}}{\partial {\xi}^{p}}{m}^{d}{({s}^{d})}^{{a}^{d}-1}+{a}^{d}\frac{\partial {m}^{d}}{\partial {\xi}^{p}}{({s}^{d})}^{{a}^{d}-1}+{a}^{d}{m}^{d}(\frac{\partial {a}^{d}}{\partial {\xi}^{p}}\ln{s}^{d}+\frac{{a}^{d}-1}{{s}^{d}}\frac{\partial {s}^{d}}{\partial {\xi}^{p}}){({s}^{d})}^{{a}^{d}-1})}{4{(1+{a}^{d}{m}^{d}{({s}^{d})}^{{a}^{d}-1})}^{3/2}}\end{array}\)
\(\begin{array}{ccc}\frac{\partial \tan\phi }{\partial {\xi}^{p}}& =& (1+{\tan}^{2}\phi )\frac{\partial \phi }{\partial {\xi}^{p}}\\ & =& \frac{(1+{\tan}^{2}\phi )\left[\frac{\partial {a}^{d}}{\partial {\xi}^{p}}{m}^{d}{({s}^{d})}^{{a}^{d}-1}+{a}^{d}\frac{\partial {m}^{d}}{\partial {\xi}^{p}}{({s}^{d})}^{{a}^{d}-1}+{a}^{d}{m}^{d}{({s}^{d})}^{{a}^{d}-1}(\frac{\partial {a}^{d}}{\partial {\xi}^{p}}\ln{s}^{d}+\frac{{a}^{d}-1}{{s}^{d}}\frac{\partial {s}^{d}}{\partial {\xi}^{p}})\right]}{(2+{a}^{d}{m}^{d}{({s}^{d})}^{{a}^{d}-1})\sqrt{(1+{a}^{d}{m}^{d}{({s}^{d})}^{{a}^{d}-1})}}\end{array}\)
Calcul des termes relatifs à \(\frac{d{({R}_{1})}_{ij}}{d(\Delta {Y}_{4})}={C}_{ijkl}^{e}:\left[\frac{{\partial \langle \phi ({f}^{\mathit{vp}})\rangle }^{+}}{\partial {\xi}^{\mathit{vp}}}{G}_{kl}^{\mathit{vp}}+{\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}\cdot \frac{\partial {G}_{kl}^{\mathit{vp}}}{\partial {\xi}^{\mathit{vp}}}\right]\cdot \Delta t\) :
L’évaluation du terme \(\frac{\partial {G}_{kl}^{\mathit{vp}}}{\partial {\xi}^{\mathit{vp}}}\) est identique dans sa forme au calcul précédent pour \(\frac{\partial {G}_{kl}^{p}}{\partial {\xi}^{p}}\) .
\(\frac{\partial {\langle \phi ({f}^{\mathit{vp}})\rangle }^{+}}{\partial {\xi}^{\mathit{vp}}}=\frac{{A}_{v}{n}_{v}}{{P}_{\text{atm}}}{(\frac{{f}^{\mathit{vp}}}{{P}_{\text{atm}}})}^{{n}_{v}-1}\frac{\partial {f}^{\mathit{vp}}}{\partial {\xi}^{\mathit{vp}}}\)
L’évaluation du terme \(\frac{\partial {f}^{\mathit{vp}}}{\partial {\xi}^{\mathit{vp}}}\) est identique dans sa forme au terme précédemment calculé \(\frac{\partial {f}^{p}}{\partial {\xi}^{p}}\) .
Évaluation des termes relatifs à \(\frac{d({R}_{3})}{d{(\Delta {Y}_{1})}_{ij}}\) et \(\frac{d({R}_{4})}{d{(\Delta {Y}_{1})}_{ij}}\)
\(\begin{array}{ccc}\frac{\partial {\tilde{G}}_{\mathit{II}}^{p}}{\partial {\sigma}_{ij}}& =& \frac{\partial {\tilde{G}}_{\mathit{II}}^{p}}{\partial {\tilde{G}}_{kl}^{p}}\frac{\partial {\tilde{G}}_{kl}^{p}}{\partial {G}_{\mathit{mn}}^{p}}\frac{\partial {G}_{\mathit{mn}}^{p}}{\partial {\sigma}_{ij}}\\ & =& \frac{{\tilde{G}}_{kl}^{p}}{{\tilde{G}}_{\mathit{II}}^{p}}({\delta}_{\mathit{mk}}{\delta}_{\mathit{nl}}-\frac{1}{3}{\delta}_{\mathit{mn}}{\delta}_{kl})\frac{\partial {G}_{\mathit{mn}}^{p}}{\partial {\sigma}_{ij}}\end{array}\) et \(\begin{array}{ccc}\frac{\partial {\tilde{G}}_{\mathit{II}}^{\mathit{vp}}}{\partial {\sigma}_{ij}}& =& \frac{\partial {\tilde{G}}_{\mathit{II}}^{\mathit{vp}}}{\partial {\tilde{G}}_{kl}^{\mathit{vp}}}\frac{\partial {\tilde{G}}_{kl}^{\mathit{vp}}}{\partial {G}_{\mathit{mn}}^{\mathit{vp}}}\frac{\partial {G}_{\mathit{mn}}^{\mathit{vp}}}{\partial {\sigma}_{ij}}\\ & =& \frac{{\tilde{G}}_{kl}^{\mathit{vp}}}{{\tilde{G}}_{\mathit{II}}^{\mathit{vp}}}({\delta}_{\mathit{mk}}{\delta}_{\mathit{nl}}-\frac{1}{3}{\delta}_{\mathit{mn}}{\delta}_{kl})\frac{\partial {G}_{\mathit{mn}}^{\mathit{vp}}}{\partial {\sigma}_{ij}}\end{array}\)
Évaluation des termes relatifs à \(\frac{d({R}_{3})}{d(\Delta {Y}_{3})}\)
\(\frac{\partial {\tilde{G}}_{\mathit{II}}^{p}}{\partial {\xi}^{p}}=\frac{{\tilde{G}}_{kl}^{p}}{{\tilde{G}}_{\mathit{II}}^{p}}({\delta}_{\mathit{mk}}{\delta}_{\mathit{nl}}-\frac{1}{3}{\delta}_{\mathit{mn}}{\delta}_{kl})\frac{\partial {G}_{\mathit{mn}}^{p}}{\partial {\xi}^{p}}\)
Évaluation des termes relatifs à \(\frac{d({R}_{3})}{d(\Delta {Y}_{4})}\) et \(\frac{d({R}_{4})}{d(\Delta {Y}_{4})}\)
\(\frac{\partial {\tilde{G}}_{\mathit{II}}^{\mathit{vp}}}{\partial {\xi}^{\mathit{vp}}}=\frac{{\tilde{G}}_{kl}^{\mathit{vp}}}{{\tilde{G}}_{\mathit{II}}^{\mathit{vp}}}({\delta}_{\mathit{mk}}{\delta}_{\mathit{nl}}-\frac{1}{3}{\delta}_{\mathit{mn}}{\delta}_{kl})\frac{\partial {G}_{\mathit{mn}}^{\mathit{vp}}}{\partial {\xi}^{\mathit{vp}}}\)