v6.04.147 SSNV147 - Traction d’un barreau endommageable : validation du pilotage#
Résumé:
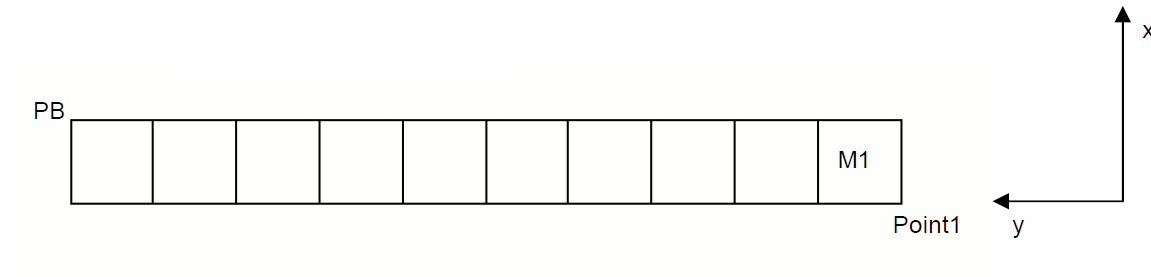
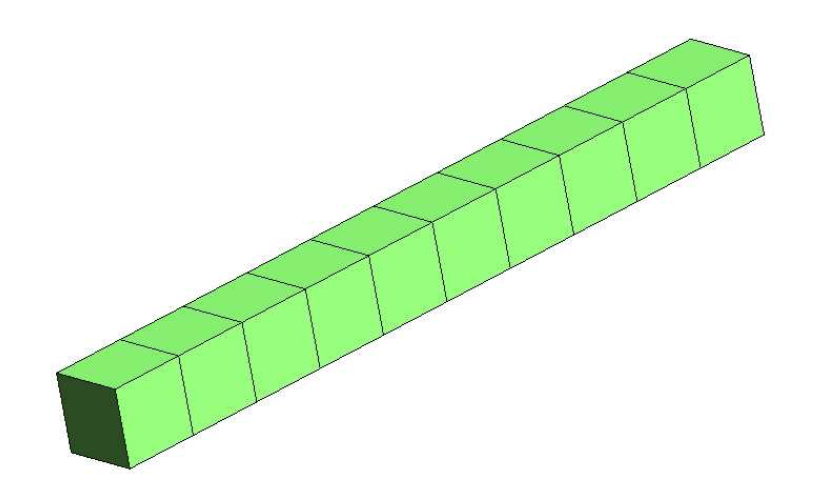
L’utilisation de lois adoucissantes peut conduire à des snap-back brutaux qui rend difficile le déroulement du calcul. Pour suivre ces instabilités, deux types de pilotage sont disponibles dans Code_Aster : le pilotage par prédiction élastique (PRED_ELAS), qui dépend de la loi de comportement et le pilotage en déformation (DEFORMATION) générique. Pour valider ces techniques, on procède à un essai de traction sur un barreau de section carrée dont on a affaibli une section afin de provoquer la localisation de l’endommagement.
Solution de référence#
Les valeurs testées sont des valeurs de non-régression, à l’exception des modélisations K et L.
Pour ces dernières, la méthode de pilotage PRED_ELAS permet de contrôler l’incrément maximal d’endommagement, si bien qu’on a une valeur de référence disponible (la somme des incréments attendus) à la fin du processus de chargement. Typiquement, après 2 incréments avec pilotage cible de 0.1, l’endommagement doit être égal à 0.1 + 0.1 = 0.2 dès lors que l’endommagement maximal a lieu au même endroit pour les deux incréments (d’où le choix d’un coefficient de Poisson de 0 pour les modélisations K et L).
Modélisation B#
Caractéristiques de la modélisation#
La modélisation testée est AXIS. La loi de comportement utilisée est la loi ENDO_ISOT_BETON. On valide le pilotage par prédiction élastique.
Caractéristiques du maillage#
Le maillage est obtenu par GIBI. Il est composé de 10 éléments QUA8.
Grandeurs testées et résultats#
Pour valider la solution obtenue, on teste au numéro d’ordre 7 :
le déplacement suivant \(y\) de la face sur laquelle le chargement est imposé,
la contrainte \(yy\) ainsi que la valeur de l’endommagement dans la maille affaiblie
.
Nom du champ |
Composante |
Lieu |
Tolérance |
DEPL |
DY |
\(\mathit{PB}\) |
défaut |
SIEF_ELGA |
SIYY |
\(\mathit{M1}\) , point 1 |
défaut |
VARI_ELGA |
V1 |
\(\mathit{M1}\) , point 1 |
défaut |
Modélisation C#
Caractéristiques de la modélisation#
Le modèle testé est 3D. La loi de comportement utilisée est la loi ENDO_ISOT_BETON. On valide le pilotage par déformation.
Caractéristiques du maillage#
Le maillage est obtenu par GIBI. Il est composé de 10 éléments HEXA8 (un seul élément dans la section),
Grandeurs testées et résultats#
Pour valider la solution obtenue, on teste au numéro d’ordre 41 :
le déplacement suivant \(z\) de la face sur laquelle le chargement est imposé,
la contrainte \(zz\) ainsi que la valeur de l’endommagement dans la maille affaiblie,
Nom du champ |
Composante |
Lieu |
Tolérance |
DEPL |
DZ |
\(E\) |
défaut |
SIEF_ELGA |
SIZZ |
\(\mathit{M1}\) , point 1 |
défaut |
VARI_ELGA |
V1 |
\(\mathit{M1}\) , point 1 |
défaut |
Modélisation D#
Caractéristiques de la modélisation#
Le modèle testé est 3D. La loi de comportement utilisée est la loi ROUSS_PR. On valide le pilotage par déformation.
Caractéristiques du maillage#
Le maillage est obtenu par GIBI. Il est composé de 10 éléments HEXA8 (un seul élément dans la section)
Grandeurs testées et résultats#
Pour valider la solution obtenue, on teste au numéro d’ordre 20 :
le déplacement suivant \(z\) de la face sur laquelle le chargement est imposé,
la contrainte \(zz\) dans la maille affaiblie
.
Nom du champ |
Composante |
Lieu |
Tolérance |
DEPL |
DZ |
\(E\) |
défaut |
SIEF_ELGA |
SIZZ |
\(\mathit{M1}\) , point 1 |
défaut |
Modélisation E#
Caractéristiques de la modélisation#
Le modèle testé est 3D. La loi de comportement utilisée est la loi ENDO_ISOT_BETON. On valide le pilotage par prédiction élastique.
Caractéristiques du maillage#
Le maillage est obtenu par GIBI. Il est composé de 10 éléments HEXA8 (un seul élément dans la section)
Grandeurs testées et résultats#
Pour valider la solution obtenue, on teste au numéro d’ordre 19 :
le déplacement suivant \(z\) de la face sur laquelle le chargement est imposé,
la contrainte \(zz\) ainsi que la valeur de l’endommagement dans la maille affaiblie.
.
Nom du champ |
Composante |
Lieu |
Tolérance |
DEPL |
DZ |
\(E\) |
défaut |
SIEF_ELGA |
SIZZ |
\(\mathit{M1}\) , point 1 |
défaut |
VARI_ELGA |
V1 |
\(\mathit{M1}\) , point 1 |
défaut |
Modélisation F#
Caractéristiques de la modélisation#
Le modèle testé est 3D. La loi de comportement utilisée est la loi BETON_DOUBLE_DP. On valide le pilotage par prédiction élastique.
Caractéristiques du maillage#
Le maillage est obtenu par GIBI. Il est composé de 10 éléments HEXA8 (un seul élément dans la section)
Grandeurs testées et résultats#
Pour valider la solution obtenue, on teste au numéro d’ordre 41 :
le déplacement suivant \(z\) de la face sur laquelle le chargement est imposé,
la contrainte \(zz\) dans la maille affaiblie.
Nom du champ |
Composante |
Lieu |
Tolérance |
DEPL |
DZ |
\(E\) |
défaut |
SIEF_ELGA |
SIZZ |
\(\mathit{M1}\) , point 1 |
défaut |
Modélisation G#
Caractéristiques de la modélisation#
Le modèle testé est 3D_HHO. La loi de comportement utilisée est la loi BETON_DOUBLE_DP. On valide le pilotage par prédiction élastique.
Caractéristiques du maillage#
Le maillage est obtenu par GIBI. Il est composé de 10 éléments HEXA27 (un seul élément dans la section)
Grandeurs testées et résultats#
Pour valider la solution obtenue, on teste au numéro d’ordre 41 :
le déplacement suivant \(z\) de la face sur laquelle le chargement est imposé,
la contrainte \(zz\) dans la maille affaiblie.
Nom du champ |
Composante |
Lieu |
Tolérance |
DEPL |
DZ |
\(E\) |
défaut |
SIEF_ELGA |
SIZZ |
\(\mathit{M1}\) , point 1 |
défaut |
Modélisation H#
Caractéristiques de la modélisation#
Le modèle testé est 3D_HHO. La loi de comportement utilisée est la loi BETON_DOUBLE_DP. On valide le pilotage en déformation.
Caractéristiques du maillage#
Le maillage est obtenu par GIBI. Il est composé de 10 éléments HEXA27 (un seul élément dans la section)
Grandeurs testées et résultats#
Pour valider la solution obtenue, on teste au numéro d’ordre 41 :
le déplacement suivant \(z\) de la face sur laquelle le chargement est imposé,
la contrainte \(zz\) dans la maille affaiblie.
Nom du champ |
Composante |
Lieu |
Tolérance |
DEPL |
DZ |
\(E\) |
défaut |
SIEF_ELGA |
SIZZ |
\(\mathit{M1}\) , point 1 |
défaut |
Modélisation I#
Caractéristiques de la modélisation#
Le modèle testé est 3D. La loi de comportement utilisée est la loi ROUSSELIER (en grandes déformations de type SIMO_MIEHE). On valide le pilotage par déformation.
Caractéristiques du maillage#
Le maillage est obtenu par GIBI. Il est composé de 10 éléments HEXA8 (un seul élément dans la section)
Grandeurs testées et résultats#
Pour valider la solution obtenue, on teste au numéro d’ordre 21 :
le déplacement suivant \(z\) de la face sur lequel le chargement est imposé,
la contrainte \(zz\) ainsi que la valeur de l’endommagement dans la maille affaiblie
la valeur de l’indicateur de plasticité dans la maille affaiblie.
Nom du champ |
Composante |
Lieu |
Tolérance |
DEPL |
DZ |
\(E\) |
défaut |
SIEF_ELGA |
SIZZ |
\(\mathit{M1}\) , point 1 |
défaut |
VARI_ELGA |
V3 |
\(\mathit{M1}\) , point 1 |
défaut |
Modélisation J#
Caractéristiques de la modélisation#
Le modèle testé est 3D. La loi de comportement utilisée est la loi ROUSSELIER avec l’option (PORO_TYPE = 2, cf. U4.43.01) permettant de calculer la porosité en fonction de la déformation totale (en grandes déformations de type SIMO_MIEHE). On valide le pilotage par déformation.
Caractéristiques du maillage#
Le maillage est obtenu par GIBI. Il est composé de 10 éléments HEXA8 (un seul élément dans la section)
Grandeurs testées et résultats#
Pour valider la solution obtenue, on teste au numéro d’ordre 21 :
le déplacement suivant \(z\) de la face sur lequel le chargement est imposé,
la contrainte \(zz\) ainsi que la valeur de l’endommagement dans la maille affaiblie
la valeur de l’indicateur de plasticité dans la maille affaiblie.
Nom du champ |
Composante |
Lieu |
Tolérance |
DEPL |
DZ |
\(E\) |
10E-6 |
SIEF_ELGA |
SIZZ |
\(M1\) , point 1 |
10E-6 |
VARI_ELGA |
V3 |
\(M1\) , point 1 |
10E-6 |
Modélisation K#
Caractéristiques de la modélisation#
Le modèle testé est AXIS. La loi de comportement utilisée est la loi ENDO_LOCA_EXP. On valide le pilotage par prédiction élastique PRED_ELAS.
Caractéristiques du maillage#
Le maillage est obtenu par GIBI. Il est composé de 10 éléments QUA8.
Grandeurs testées et résultats#
Pour valider la solution obtenue, on teste au numéro d’ordre 2 l’endommagement atteint qui, après 2 incréments avec pilotage cible de 0.1, doit être égal à 0.2.
Nom du champ |
Composante |
Lieu |
Valeur de référence |
Tolérance |
VARI_ELGA |
V1 |
\(\mathit{M1}\) , point 1 |
0.2 |
10E-6 |
Modélisation L#
Caractéristiques de la modélisation#
Le modèle testé est 3D. La loi de comportement utilisée est la loi ENDO_LOCA_EXP. On valide le pilotage par prédiction élastique PRED_ELAS.
Caractéristiques du maillage#
Le maillage est obtenu par GIBI. Il est composé de 10 éléments HEXA8 (un seul élément dans la section)
Grandeurs testées et résultats#
Pour valider la solution obtenue, on teste au numéro d’ordre 2 l’endommagement atteint qui, après 2 incréments avec pilotage cible de 0.1, doit être égal à 0.2.
Nom du champ |
Composante |
Lieu |
Valeur de référence |
Tolérance |
VARI_ELGA |
V1 |
\(\mathit{M1}\) , point 1 |
0.2 |
10E-6 |
Modélisation M#
Caractéristiques de la modélisation#
Le modèle testé est 3D_GRAD_HHO. La loi de comportement utilisée est la loi BETON_DOUBLE_DP. On valide le pilotage par prédiction élastique.
Caractéristiques du maillage#
Le maillage est obtenu par GIBI. Il est composé de 10 éléments HEXA27 (un seul élément dans la section)
Grandeurs testées et résultats#
Pour valider la solution obtenue, on teste au numéro d’ordre 41 :
le déplacement suivant \(z\) de la face sur laquelle le chargement est imposé,
la contrainte \(zz\) dans la maille affaiblie.
Nom du champ |
Composante |
Lieu |
Tolérance |
DEPL |
DZ |
\(E\) |
défaut |
SIEF_ELGA |
SIZZ |
\(\mathit{M1}\) , point 1 |
défaut |
Modélisation H#
Caractéristiques de la modélisation#
Le modèle testé est 3D_GRAD_HHO. La loi de comportement utilisée est la loi BETON_DOUBLE_DP. On valide le pilotage en déformation.
Caractéristiques du maillage#
Le maillage est obtenu par GIBI. Il est composé de 10 éléments HEXA27 (un seul élément dans la section)
Grandeurs testées et résultats#
Pour valider la solution obtenue, on teste au numéro d’ordre 41 :
le déplacement suivant \(z\) de la face sur laquelle le chargement est imposé,
la contrainte \(zz\) dans la maille affaiblie.
Nom du champ |
Composante |
Lieu |
Tolérance |
DEPL |
DZ |
\(E\) |
défaut |
SIEF_ELGA |
SIZZ |
\(\mathit{M1}\) , point 1 |
défaut |
Synthèse des résultats#
Ce cas-test permet de vérifier le bon fonctionnement du pilotage pour les différentes lois de comportement adoucissantes. Les résultats obtenus fournissent des valeurs de non-régression, à l’exception des modélisations K et L pour lesquelles on dispose d’une solution analytique.