r3.08.09 Poutres multi-fibres en grands déplacements#
Résumé:
Ce document présente le traitement des grands déplacements de l’élément de poutre multi-fibres POU_D_TGM activé par le mot-clé DEFORMATION=”GROT_GDEP”.
Il permet de combiner à la fois non-linéarité matériau (description de la section en fibres) et non-linéarité géométrique. La description des grands déplacements reste approchée et fait l’hypothèse de petits pas de temps.
Cet élément est adapté pour la caractérisation de la ruine de structures treillis.
Remarque1 : le traitement des grands déplacements pour les autres éléments de poutre est décrit dans [R3.08.01].
Remarque2 : Le mot-clé RIGI_GEOM=”OUI” permets de désactiver le traitement particulier des grands déplacements et a pour but l’écriture de l’équilibre de la poutre sur la configuration déformée.
Notations#
Les notations utilisées ici correspondent à celles de et .
Présentation de la démarche#
Introduction#
La prise en compte de grands déplacements, qu’ils résultent d’un mouvement de corps rigide ou bien d’une transformation quelconque de la structure étudiée introduit une non-linéarité supplémentaire (en plus de celle introduite par la non-linéarité comportementale par exemple). Cette non-linéarité se traduit par le fait que configuration initiale de la structure et configuration finale (ou «déformée») ne peuvent plus être confondues comme c’est habituellement le cas pour le traitement des problèmes en petites perturbations.
Pour des éléments finis de structures ( i.e. poutres, plaques, coques), il se pose un problème supplémentaire: les rotations n’ont plus un caractère vectoriel, on ne peut donc plus les transformer comme des vecteurs lors du passage du repère local au repère global.
En effet, lorsque des vecteurs déplacements sont exprimés, dans un repère local d’un élément fini (repère attaché au SEG2 de la poutre dans lequel sont effectué tous les calculs pour simplifier l’écriture des différents termes), il est tout à fait physique de les transformer dans un repère global attaché à la structure. Quand on s’intéresse à des éléments de structure, ceux-ci portent également des degrés de liberté de rotation; quand ces rotations sont «petites», on peut montrer qu’elles s’identifient à des vecteurs et donc les transformer comme des déplacements.
Cela n’est plus le cas quand les rotations sont «grandes» et cela se traduit par la non-commutativité des rotations. Faute d’une description prenant en compte cette particularité, la continuité des degrés de liberté aux nœuds des éléments n’est alors plus assurée.
L’élément géométriquement exact POU_D_T_GD#
L’élément fini de poutre POU_D_T_GD, déjà intégré au code depuis de nombreuses années, modélise une poutre de Timoshenko en grands déplacements au sens où le champ de déplacements utilisé dans la formulation (lors du passage 3D →poutres) est écrit de manière exacte. Il tient notamment compte de l’opérateur rotation exact entre deux configurations de l’élément (c’est-à-dire que l’on ne fait aucune hypothèse simplificatrice sur les déplacements).
- Le comportement, uniquement élastique, est toujours écrit en petites déformations; cet élément avait en effet été introduit pour traiter des grands déplacements «presque rigides» d’une structure en dynamique (mouvement des entretoises entre les conducteurs [1]_
électriques d’une ligne aérienne).
Cet élément est formulé avec une approche Lagrangienne Totale relativement complexe, le traitement exact des grandes rotations demandant de faire appel à la théorie des quaternions pour mettre à jour correctement les déplacements. Le comportement est directement formulé sur les efforts généralisés (sans passer par les contraintes) et ne se prête pas vraiment à une extension multi-fibres qui par nature travaille sur les contraintes [2]_ .
L’élément multi-fibres POU_D_TGM#
C’est un élément de poutre de Timoshenko avec gauchissement de la section transverse et approche multi-fibres pour rendre compte de la progression de la plasticité dans la section. Cet élément disposait déjà d’une option générique “PETIT_REAC” (maintenant supprimée) capable de réactualiser la géométrie à chaque itération de l’algorithme de résolution par pas. Cela permettait de traiter des problèmes en grands déplacements sous l’hypothèse de petites rotations. Cependant l’absence de rigidité géométrique dans la formulation rend la convergence très difficile dans le cas d’instabilité et ce même pour des problèmes plans. De plus, on n’exploite pas toutes les possibilités de la réactualisation de la géométrie (cf. 4.4.1 ).
Un petit historique#
C’est à partir des années 70 que l’analyse non linéaire géométrique des structures formées de poutres s’est développée avec l’utilisation de la méthode des éléments finis. L’analyse s’est d’abord portée sur des structures planes, puis sur des structures tridimensionnelles avec les travaux fondateurs de Bathe en 1979. C’est en effet à cette époque qu’apparaît pour la première fois une formulation dite « Updated Lagrangian» (UL), c’est-à-dire une formulation qui met à jour la géométrie de la structure à chaque itération de l’algorithme de résolution, permettant d’obtenir une formulation simplifiée tout en restant robuste.
Par la suite de nombreux travaux se sont inspirés de ceux de Bathe et les ont enrichis, notamment avec le traitement de l’épineux problème des grandes rotations mis en évidence par Argyris. On peut également citer les travaux de Yang et McGuire ainsi que ceux de Conci.
Un autre point important en analyse non linéaire des structures est la nécessité de bien estimer le résidu pour obtenir des résultats justes. Or dans le cas des éléments poutres, les fonctions d’interpolation géométrique sont du premier ordre (les éléments poutres ne sont pas iso-paramétriques). Cela entraîne des erreurs dans le calcul du résidu si la structure se déforme beaucoup et si l’on n’utilise pas assez d’éléments.
Une solution consiste bien évidemment à augmenter le nombre d’éléments finis surtout pour des structures courbes. Cependant cela peut devenir coûteux et des auteurs ont donc proposé des techniques dites de « force recovery [3]_ » pour contourner ce problème et permettre de n’utiliser qu’un seul élément fini par poutre. Certains comme Conci ont pour cela séparé mouvement de corps rigide et mouvement entraînant un travail de déformation non nul. Cette approche a donné lieu à une nouvelle formulation que l’on qualifie aussi de formulation «co-rotationnelle».
D’autres ont entrepris de corriger la valeur du résidu en rajoutant un terme supplémentaire dans la formulation.
Démarche#
L’approche décrite ici s’appuie sur une étude bibliographique exhaustive et plus particulièrement sur le travail de deux thèses sur l’analyse non linéaire des structures formées de poutres. L’élément retenu s’appuie sur une Formulation Lagrangienne Actualisée à chaque Itération (FLAI) [4]_ et on suppose les rotations «modérées» par itération de sorte que l’on peut simplement se ramener au cas où les rotations sont commutatives jusqu’au second ordre (d’où le vocable «modéré» par opposition à «petit» i.e. du premier ordre).
La démarche présentée en détail dans la section suivante peut être décomposée ainsi:
Comme pour tous les éléments de structures, on formule des hypothèses sur la cinématique permettant de déterminer un champ de déplacements tridimensionnel en tout point de la section à partir des degrés de liberté considérés.
On écrit le principe des travaux virtuels dans le cadre d’une Formulation Lagrangienne Actualisée à chaque Itération. On est en petites déformations.
On introduit le champ de déplacement et les fonctions d’interpolation (qui interpolent les déplacements généralisés en fonction des inconnues aux nœuds) pour obtenir les expressions de la matrice tangente que l’on décomposera en plusieurs termes (chacun renvoyant aux différents phénomènes que l’on cherche à prendre en compte).
La prise en compte de grandes rotations de la structure repose sur une modification du champ de déplacement initial, en supposant les rotations modérées entre deux itérations.
Description théorique de l’élément#
Champ de déplacement et champ de déformations associé#
Hypothèses sur la cinématique#
La cinématique de poutre adoptée est la suivante:
L’élément de poutre est supposé droit, la section constante.
La section transverse est indéformable dans son plan mais peut se gauchir axialement
Les déformations de cisaillement transverse ne sont pas négligées et entraînent une rotation de la section autour de ses axes
Les déformations sont petites, mais les déplacements et les rotations peuvent être grandes
On se place au niveau d’un élément fini, c’est-à-dire d’un segment à 2 nœuds, un repère local à l’élément est défini par l’axe du segment et les axes principaux d’inertie géométrique. Le centre \(O\) du repère coïncide avec le nœud n°1 (qui est le centre de gravité de la section), on définit également le centre de torsion (ou de cisaillement) \(C\) de la section, où l’application d’un effort tranchant n’engendre pas de travail en torsion et vice-versa.
Il est facile de montrer que si les déplacements axiaux sont exprimés à partir des déplacements du point \(O\) et les déplacements dans le plan de la section à partir de ceux du point \(C\) alors tous les efforts sont découplés, c’est-à-dire que la matrice de comportement (pour les éléments de poutre, il s’agit de la matrice obtenue après expression de la loi de Hooke et intégration sur la section) est diagonale. La restitution dans le repère global se fait alors en deux temps: passage de tous les déplacements dans le repère local de centre \(O\) puis passage du repère local au repère global.
Expression du champ de déplacement#
Pour une telle section, le déplacement d’un point \(P\) d’abscisse \(x\) , de coordonnées \((y,z)\) dans le repère de centre \(O\) s’exprime comme la somme d’un terme de translation et d’un terme de rotation (hypothèse de sections droites indéformables).
Pour tenir compte du gauchissement des sections, on rajoute un terme de déplacement axial non uniforme. Le champ de déplacement \(\overrightarrow{\xi}\) s’écrit alors:
\(\overrightarrow{\xi}(x,y,z)=\lbrace \begin{array}{ccc}u(x,y,z)& =& {u}_{O}(x)+(z\times {\theta}_{y}(x))-(y\times {\theta}_{z}(x))+(\omega (y,z)\times {\theta}_{x,x}(x))\\ v(x,y,z)& =& {v}_{C}(x)-((z-{z}_{C})\times {\theta}_{x}(x))\\ w(x,y,z)& =& {w}_{C}(x)+((y-{y}_{C})\times {\theta}_{x}(x))\end{array}\) |
éq 4-1 |
Les indices \(C\) font référence au centre de torsion \(C\) qui n’est pas confondu avec le centre de gravité \(O\) dans le cas de sections non bi-symétriques. Le passage des déplacements en \(C\) à ceux en \(O\) est effectué par un simple changement de repère. La fonction \(\omega\) communément appelée fonction de gauchissement, et qui ne dépend que de la forme de la section, permet de décrire le déplacement axial non uniforme. Les degrés de liberté de l’élément sont portés aux nœuds et sont interpolés dans la longueur de l’élément. Il y a 14 degrés de liberté, soit 7 à chaque nœud qui sont: \((u,v,w,{\theta}_{x},{\theta}_{y},{\theta}_{z},{\theta}_{x,x})\) . On retrouve naturellement 3 degrés de translation et 3 degrés de rotation pour décrire la cinématique, de plus le taux de torsion \({\theta}_{x,x}\) est également pris comme mesure du gauchissement.
Lorsque les rotations ne peuvent plus être considérées comme petites, il faut alors enrichir le champ de déplacement d’un terme non linéaire. En effet, au terme de gauchissement près et en se plaçant dans le repère de centre \(O\) , l’expression () peut s’écrire vectoriellement comme:
\(\overrightarrow{\xi}(x,y,z)=\overrightarrow{{\xi}_{O}}(x)+(R(x)-I)(\begin{array}{}0\\ y\\ z\end{array})\) |
éq 4-2 |
Cette expression fait apparaître l’opérateur rotation \(R\) . Si \(P\) est le point de coordonnées \((y,z)\) alors \(R\) permet d’emmener le vecteur \(\overrightarrow{\mathrm{OP}}\) dans sa configuration finale \(\overrightarrow{\mathrm{OP}'}\) . \(R\) dépend de la matrice antisymétrique associée au vecteur rotation \(\overrightarrow{\theta}={}^{t}({\theta}_{x},{\theta}_{y},{\theta}_{z})\) qui est une inconnue du problème au même titre que \(\overrightarrow{{\xi}_{O}}\) , on peut même montrer que \(R\) s’écrit comme une exponentielle de matrice:
\(R={e}^{\theta}=I+\theta +\frac{{(\theta )}^{2}}{2!}+\cdots +\frac{{(\theta )}^{p}}{p!}+\cdots \text{avec}\theta =(\begin{array}{ccc}0& -{\theta}_{z}& {\theta}_{y}\\ {\theta}_{z}& 0& -{\theta}_{x}\\ -{\theta}_{y}& {\theta}_{x}& 0\end{array})\) |
éq 4-3 |
- Dans (), cet opérateur a été remplacé par son développement au premier ordre car les rotations étaient petites. Pour prendre en compte de grandes rotations, une des possibilités [5]
est de développer l’opérateur rotation au moins jusqu’au second ordre. On parle alors de rotations modérées ( finite rotations en anglais). C’est le cumul de ces rotations modérées qui conduira à de grandes rotations.
Le champ de déplacement est alors enrichi d’un terme non linéaire, quadratique en \({\theta}_{x},{\theta}_{y},{\theta}_{z}\) . Le développement au second ordre s’obtient en développant l’exponentielle jusqu’au terme en \({\theta}^{2}\) .
Champ de déformations associé#
Calculons par ailleurs les déformations de Green-Lagrange du champ de déplacement (), nous utilisons d’ores et déjà l’hypothèse des petites déformations, en effet considérons l’expression complète des déformations de Green-Lagrange (les sections étant supposées indéformables dans leur plan, la moitié des termes est déjà nulle):
Les déformations étant petites on en déduit que \(∣{u}_{,x}∣\ll 1\) et par conséquent \(∣{u}_{,x}{u}_{,y}∣\ll ∣{u}_{,y}∣\) et \(∣{u}_{,x}{u}_{,z}∣\ll ∣{u}_{,z}∣\) . On peut donc simplifier l’expression complète de \(E\) en négligeant les termes quadratiques en \(∣{u}_{,i}∣\) où \(i=(x,y,z)\) .Dans ces termes ne sont pas négligés, ils conduisent alors à une expression de la matrice tangente plus complexe et une convergence améliorée. En revanche ils ne modifient pas la précision des résultats.
En injectant le champ de déplacement () dans cette expression simplifiée on obtient finalement la forme suivante \(E=\epsilon +\eta\) :
où \(\epsilon\) sont les déformations linéarisées et \(\eta\) les déformations dites non linéaires (issues des termes quadratiques dans les déformations de Green-Lagrange). Si on injecte le champ de déplacements non linéaire pour le traitement des grandes rotations alors, un terme non linéaire \({\eta}_{\mathrm{gr}}\) supplémentaire apparaît.
Principe des travaux virtuels#
Les hypothèses utilisées#
Pour écrire le principe des travaux virtuels (PTV), on fera l’hypothèse d’une Formulation Lagrangienne Actualisée à chaque Itération (FLAI), c’est-à-dire que la géométrie de la structure étudiée sera constamment remise à jour. Localement cela se traduit par la position des noeuds de l’élément qui change à chaque itération de l’algorithme de Newton, permettant de calculer une nouvelle matrice de passage du repère local au repère global.
- Soit un élément en configuration initiale \({C}_{0}\) . On peut décrire les déformations de l’élément à partir de 3 configurations, la configuration initiale
donc, ainsi que 2 autres configurations: \({C}_{1}\) qui désigne une configuration déformée connue mais pas forcément en équilibre et \({C}_{2}\) qui désigne une configuration déformée inconnue proche de \({C}_{1}\) . La dernière configuration connue est prise comme référence, on écrira le PTV dans cette configuration.
Pour se situer dans l’algorithme de résolution, on peut par exemple imaginer que \({C}_{0}\) désigne la configuration au début des pas de temps \((t=0)\) . De plus on a déjà effectué une première itération, on a donc déterminé \({C}_{1}\) qui n’est pas en équilibre. On va donc réaliser une nouvelle itération, en choisissant \({C}_{1}\) comme référence et en écrivant le PTV dans une configuration inconnue et ainsi de suite… jusqu’à trouver une configuration en équilibre et alors passer au pas de temps suivant.
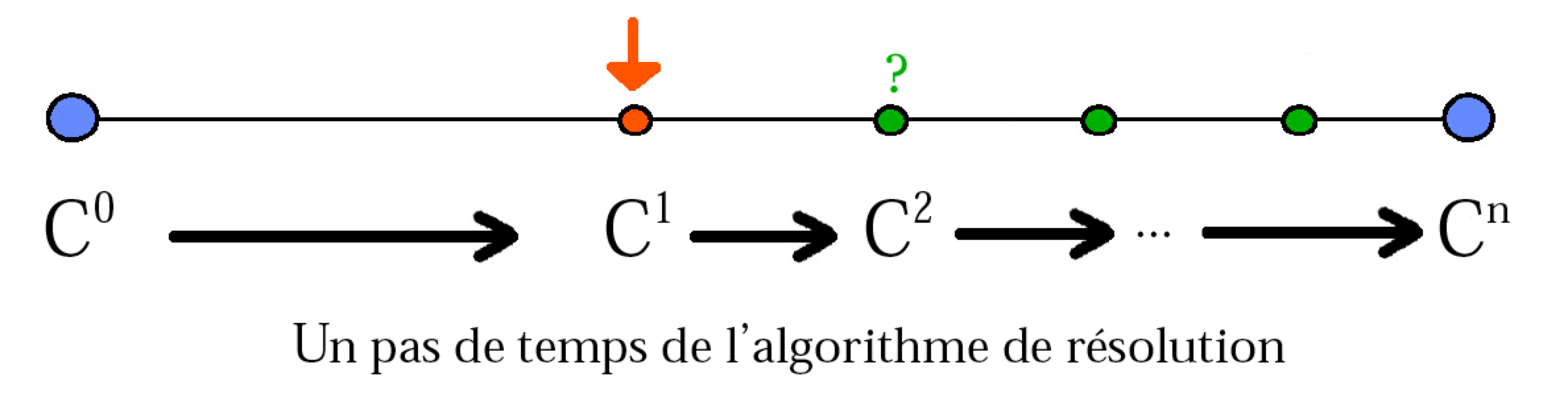
Illustration 4.1: Les différentes configurations de référence.
On peut faire une première remarque: les supports des éléments de poutre dans le Code_Aster sont des segments à deux nœuds (SEG2), par conséquent leurs fonctions d’interpolation géométrique sont linéaires. On ne pourra donc jamais avec ces éléments reproduire exactement la «dernière configuration connue», cela représente une approximation et il faudra donc veiller à avoir un maillage suffisamment fin pour les problèmes où la courbure des éléments devient non négligeable. La solution qui consiste à corriger le résidu ou à utiliser une formulation co-rotationnelle n’a pas été implantée car elle aurait demandé des modifications profondes du code .
La FLAI présente de nombreux avantages, par exemple on pourra confondre tenseur des contraintes de Cauchy (exprimée sur la configuration finale à l’itération précédente) et tenseur des contraintes de Piola-Kirchoff de seconde espèce (exprimée sur la configuration initiale à l’itération courante) car entre les deux itérations, la géométrie aura été actualisée:
Cela signifie que dans la configuration de référence (celle notamment qui permet d’exprimer les déformations virtuelles) les déplacements initiaux déjà acquis par l’élément seront toujours nuls car la dernière configuration calculée sera prise comme référence. Seul l’état de contraintes initial dans une configuration donnée sera en général non nul.
En ce qui concerne le comportement, il est écrit de manière incrémentale et il s’exprime en quantités Lagrangiennes grâce au tenseur de Piola-Kirchhoff \(\mathrm{II}S\) et aux déformations de Green-Lagrange \(E\) . Les petites déformations permettent de linéariser la loi de comportement et par conséquent:
Pour des éléments de poutres, on fait l’hypothèse de contraintes planes dans la section. Cela revient à supposer que la poutre est constituée de fibres longitudinales travaillant en traction-compression.
Cette hypothèse (\({\sigma}_{yy}={\sigma}_{zz}={\sigma}_{yz}=0\) ) permet d’exprimer la loi de comportement dans le cas des poutres sous la forme :
Enfin l’hypothèse d’un champ de déplacement avec rotations modérées sera licite pour obtenir des grandes rotations entre pas et pour le chargement total. En effet, la FLAI fait que l’on sommera dès le début d’un pas et à la fin de chaque itération les accroissements de déplacements et de contraintes calculés. L’accroissement total de déplacement et de rotation sur un pas pourra dès lors être grand.
Écriture du PTV et différenciation#
Le principe des travaux virtuels qui est la formulation faible des lois de la mécanique des milieux continus s’écrit:
où toutes les quantités sont exprimées sur la configuration déformée inconnue, \(\sigma\) est le tenseur des contraintes de Cauchy. De plus \(\overrightarrow{{\xi}^{\text{*}}}\) désigne un champ de déplacement virtuel cinématiquement admissible au sens des conditions aux limites.
Pour résoudre un tel problème, on doit d’abord changer de configuration grâce à un changement de variable. Le principe des travaux virtuels écrit en quantités Lagrangiennes (dans la configuration de référence donc et non la configuration déformée) s’exprime à l’aide des déformations virtuelles de Green-Lagrange \({E}^{\text{*}}\) et du tenseur des contraintes de Piola-Kirchhoff de seconde espèce (PKII) \(S\) .
où \(\overrightarrow{f}\) représente la densité de force volumique, \(\overrightarrow{t}\) la densité de force surfacique. Par la suite, on notera \({W}_{\mathrm{ext}}\) le membre de droite, et l’on supposera que le chargement est conservatif et non suiveur de sorte que le travail des forces externes est constant sur un pas de temps.
Le tenseur des contraintes PKII () exprime la même quantité que le tenseur des contraintes de Cauchy mais en prenant comme référence la configuration initiale. Le tenseur des déformations virtuelles de Green-Lagrange s’écrit:
Pour résoudre l’équilibre on doit vérifier () pour tout déplacement virtuel cinématiquement admissible à zéro \(\overrightarrow{{\xi}^{\text{*}}}\) . On applique la méthode de Newton à la fonctionnelle \({W}_{int}-{W}_{\mathrm{ext}}\) et pour cela on différencie la fonctionnelle par rapport à l’inconnue \(\overrightarrow{\xi}\) , cela permet de transformer la résolution d’un problème non linéaire (\({W}_{int}\) ne dépend pas linéairement de \(\overrightarrow{\xi}\) ) en une suite de résolution de systèmes linéaires.
On résout donc:
où \({W}_{int}^{1}\) représente le travail déjà équilibré en configuration 1. Le principe est d’équilibrer ce travail avec celui des forces internes \({W}_{\mathrm{ext}}\) à l’aide d’itérations successives.
Le premier terme sous l’intégrale modélise la rigidité matérielle. En effet, comme la loi de comportement est linéarisée et comme la configuration de référence est la dernière configuration connue (donc \(\overrightarrow{\xi}=\overrightarrow{0}\) ), on peut écrire en utilisant () et ():
La FLAI permet en fait ici de s’affranchir d’un terme supplémentaire qui couple déformations virtuelles non linéaires et déformations linéaires et que l’on appelle terme des déplacements initiaux (ces déplacements sont les déplacements déjà subis par notre structure par rapport à sa configuration de référence et qui sont toujours nuls ici). En fait grâce à la FLAI, on déporte le changement de géométrie et la non-linéarité qui en découle dans le changement de repère local-global propre à la méthode des éléments finis.
Le second terme sous l’intégrale modélise la rigidité géométrique de la structure. C’est grâce à ce terme que l’on va pouvoir traduire les effets du second ordre et converger rapidement vers la solution. Ce terme fait en effet directement intervenir les déformations non linéaires puisque d’après (), \(\Delta {E}^{\text{*}}=\Delta {\eta}^{\text{*}}\) . Si le champ de déplacement contient de plus des termes non linéaires pour la prise en compte de rotations modérées alors bien sûr, les déformations non linéaires contiennent, elles aussi, un terme supplémentaire.
Il reste à remarquer que tenseur des contraintes de Cauchy et de PKII s’identifient car configuration initiale et finale sont confondues suite à la réactualisation.
Bilan#
On a donc:
Physiquement, tout se passe comme ci le résidu \({W}_{\mathrm{ext}}-{W}_{int}^{1}\) est dissipé itération après itération par un travail \(\Delta W\) en partie dû à la déformation du matériau (rigidité matérielle) et en partie dû aux grands déplacements de la structure (rigidité géométrique). La rigidité géométrique a un sens dès lors que la structure subit de grands déplacements.
Le terme de rigidité matérielle est un terme classique qui est déjà présent dans la formulation actuelle des éléments POU_D_TGM. Il peut éventuellement traduire à travers l’approche multi-fibres la non-linéarité matériau (plasticité par exemple).
Le terme de rigidité géométrique que l’on retrouve habituellement en grands déplacements est nouveau (dans la configuration de référence réactualisée, il existe en général un état de contrainte non nul). Il traduit donc la non-linéarité géométrique et c’est grâce entre autres à ce terme omis dans la formulation PETIT_REAC que la convergence sera plus rapide voire enfin possible dans le cas d’instabilités.
Le second terme dans le membre de droite est le travail des forces internes à l’itération précédente, c’est son calcul exact qui garantit une convergence vers un résultat juste, c’est pourquoi, on proposera une amélioration dans son calcul.
Il faut bien noter que dans le terme de rigidité géométrique l’inconnue intervient au travers des déformations virtuelles, en effet ces dernières dépendent linéairement des inconnues.
Détermination de la matrice tangente#
Rappel sur la discrétisation#
Désormais il s’agit de déterminer la matrice tangente qui est la combinaison des différents termes cités plus haut. Pour cela il faut faire intervenir la discrétisation en éléments finis, en particulier les fonctions d’interpolation puis expliciter les intégrales de volume qui interviennent en ().
Pour des éléments de structure comme les poutres, cette discrétisation s’effectue en deux temps: d’une part l’intégration sur les sections situées aux points de Gauss et d’autre part l’intégration dans la longueur. Comme on a choisi un comportement multi-fibres pour le traitement de la plasticité, l’intégration dans la section est faite grâce aux fibres pour le comportement axial (effort normal, moments fléchissants) et à l’aide de lois de comportement en efforts généralisés pour le reste des efforts.
On calcule des intégrales sur la section en chaque point de Gauss (de l’élément de poutre) car ce sont les quantités en ces points qui vont permettre ensuite d’intégrer numériquement dans la longueur (à l’aide de formules de quadrature de Gauss). Les déformations généralisées sont alors exprimées à l’aide d’une matrice de fonctions d’interpolation. L’intégration numérique permet alors de déterminer une matrice tangente: on ne cherchera donc ici qu’à exprimer la matrice après intégration sur la section car c’est son expression qui sera nécessaire pour l’implémentation dans le code, l’intégration numérique étant transparente.
Expression de la rigidité matérielle#
Nous pouvons expliciter le terme de rigidité matérielle, en explicitant d’abord la loi de comportement () puis en remplaçant les déformations linéarisées \(\epsilon\) par leur expression () et enfin en intégrant sur la section, ne conservant donc qu’une intégrale de longueur.
où on a: \({D}_{s}=BU\) , \(B\) étant la matrice d’interpolation des déformations généralisées \(({u}_{O,x},({v}_{C,x}-{\theta}_{z}),({w}_{C,x}+{\theta}_{y}),{\theta}_{x,x},{\theta}_{y,x},{\theta}_{z,x},{\theta}_{x,xx})\) et \(U\) le vecteur des inconnues nodales.
\({K}_{s}\) est une matrice comportementale qui traduit à la fois les caractéristiques du matériau et les caractéristiques géométriques de la section (d’où l’apparition des constantes \({S}_{y}^{'},{S}_{z}^{'},J\) et \({I}_{\omega}\) faisant référence respectivement aux sections réduites, à la constante de torsion et à la constante de gauchissement):
Les intégrales de surface qui apparaissent encore dans l’expression de \({K}_{s}\) font référence aux termes calculés grâce au maillage de la section transverse en fibres. Hormis dans le cas élastique, les termes extra-diagonaux ne sont en général pas nul car le module d’Young \(E\) n’est alors plus homogène dans la section.
Les expressions des fonctions d’interpolations \({\xi}_{i=(1,\dots ,8)},{N}_{j=(1,\dots ,4)}\) sont données dans .
On peut remarquer que l’approche choisie pour déterminer la matrice de rigidité matérielle n’est pas celle adoptée dans le Code_Aster pour les éléments de poutre d’Euler POU_D_E et de Timoshenko POU_D_T. En effet, dans notre travail, l’approche est dérivée des lois de la mécanique des milieux continus 3D et l’on se donne pour cela un champ de déplacement 3D, ce qui nous permet de faire intervenir les grands déplacements en écrivant le PTV en quantités Lagrangiennes.
Pour formuler les éléments de poutre d’Euler et de Timoshenko en hypothèse des petites perturbations élastiques, l’approche utilisée dans Code_Aster consiste à écrire directement le principe fondamental de la dynamique sur des tronçons élémentaires de poutre, puis d’en écrire une formulation faible à l’aide de fonctions tests, et enfin à introduire des lois de comportement en efforts généralisés (du type \(N=\mathrm{ES}\epsilon\) ). On s’aperçoit alors qu’en choisissant bien les fonctions tests, il est possible d’exprimer le travail développé dans le champ test uniquement en fonction des inconnues aux nœuds, cela sans avoir à aucun moment discrétisé les inconnues.
Ainsi lorsque l’on travaille en petites perturbations élastiques, il peut être plus intéressant d’utiliser ces éléments exacts plutôt que l’élément présenté dans ce travail qui intègre numériquement la matrice de rigidité par quadrature de Gauss.
Expression de la rigidité géométrique#
De la même manière, on peut expliciter la rigidité géométrique. Pour cela, chaque composante \(\Delta {\eta}_{xi}^{\text{*}}\) de \(\Delta {\eta}^{\text{*}}\) peut se mettre sous la forme d’une pseudo-forme quadratique i.e. \({}^{t}C{L}_{xi}{C}^{\text{*}}\) où \({L}_{xi}\) est une matrice qui ne dépend pas des déplacements et \(C\) un vecteur dépendant des inconnues généralisées et de leurs dérivées: \({}^{t}C=({\theta}_{x},{v}_{C,x},{w}_{C,x},{\theta}_{x,x})\) . Avec des notations évidentes, on en déduit:
L’intégration sur la longueur s’effectue aussi en interpolant les inconnues généralisées, les inconnues devenant les degrés de liberté aux nœuds. Ainsi on remplace \(C\) par \({B}_{\sigma}U\) . Ci-dessous, on donne l’expression de la matrice d’interpolation \({B}_{\sigma}\) et de la matrice \({R}_{s}\) :
Dans la matrice de rigidité géométrique interviennent les efforts généralisés (effort normal \(N\) , efforts tranchants \({T}_{y}\) et \({T}_{z}\) , moments fléchissants \({M}_{y}\) et \({M}_{z}\) ) ainsi que des caractéristiques géométriques de la section. Le coefficient \(K\) est appelé coefficient de Wagner et s’écrit:
Les caractéristiques de section non triviales sont:
Ces caractéristiques sont en général non nulles pour les sections ne présentant pas de double symétrie, c’est le cas par exemple des cornières équipant les supports treillis.
Le dernier terme dans le coefficient de Wagner n’est pas pris en compte dans le code car on ne dispose en général pas de l’expression de la fonction de gauchissement \(\omega\) pour calculer \({I}_{\omega \mathrm{r2}}\) .
Expression de la matrice de correction pour la prise en compte de grandes rotations de la structure#
Pour prendre en compte des grandes rotations de la structure, il faut exprimer la matrice de correction apportée à la rigidité géométrique par l’ajout du champ de déformation non linéaire \(\Delta {\eta}_{\mathrm{gr}}\) . La démarche détaillée de la dérivation est donnée dans ou dans . On ne présente pas les calculs ici, car ils sont longs et fastidieux. D’autres auteurs ont obtenu la même matrice de correction à partir de considération sur la nature des moments fléchissants et du moment de torsion.
- Il est intéressant de remarquer que la seule modification apportée par la prise en compte de grandes rotations concerne un ajout à la matrice tangente. Le résidu est inchangé, c’est-à-dire que sans la prise en compte des grandes rotations, on ne risque pas d’obtenir des résultats faux
mais plutôt de rencontrer des difficultés de convergence lorsque l’on traitera certains problèmes.
En effet, le problème des grandes rotations au sens de la taille n’est pas à proprement parler un obstacle: pour des problèmes plans, il n’est absolument pas nécessaire d’utiliser la matrice de correction (plus exactement sa contribution s’annule d’elle-même). Le vrai problème réside dans la transformation des rotations lors d’un changement de repère. Or quand les rotations sont infinitésimales, on peut les remplacer par leur développement au premier ordre et alors elles s’identifient à des vecteurs, ce qui permet de les transformer comme des déplacements lors du passage du repère local au repère global. Par contre lorsqu’elles sont grandes, ce n’est plus possible, mais l’on ne risque de rencontrer des problèmes de convergence que pour des cas précis où la continuité des rotations aux nœuds est perdue.
Ainsi le problème se pose pour des structures présentant un couplage flexion-torsion et des éléments finis non colinéaires.
La matrice de rigidité tangente est donc enrichie d’un terme de correction \({K}_{c}\) suite à la prise en compte de rotations modérées dans l’expression des déplacements:
Calcul du résidu#
Pour compléter le modèle, on présente dans la suite deux améliorations suggérées par les travaux de thèses et pour améliorer la précision des résultats.
Le calcul du résidu, et plus particulièrement du travail des forces internes \({W}_{int}^{1}\) est effectué par intégration numérique après avoir intégré la loi de comportement:
\(Q\) est un vecteur contenant les 7 efforts généralisés et \(B\) la matrice d’interpolation des déformations généralisées déjà donnée en () et qui permet d’exprimer les incréments de déformations associés aux déplacements nodaux \(U\) .
Les améliorations proposées touchent respectivement à l’expression de la loi de comportement en torsion donc à \(Q\) et au calcul des déformations linéarisées \(\epsilon\) . Elles doivent permettre une meilleure précision mais aussi une accélération de la convergence.
Calcul de l’incrément de déformation#
D’une part, il paraît intéressant de tenir compte de la mise à jour à chaque itération de la géométrie, en effet, on peut alors calculer plus astucieusement l’incrément de déformation depuis le pas précédent. Au lieu de calculer l’incrément de déformation à partir de l’incrément de déplacement du pas, on peut calculer la déformation due au déplacement de la dernière itération de Newton et la cumuler à chaque itération. Comme le déplacement entre deux itérations tend vers zéro, on est plus précis.
En effet si \(\delta {u}_{i}\) désigne l’incrément de déplacement consécutif à l’itération \(i\) de l’algorithme de résolution par pas et si \(\epsilon (u)\) désigne l’incrément de déformation généralisée associé à un incrément de déplacement \(u\) alors à l’itération \(n\) , on procède ainsi:
Cela nécessite un peu plus de mémoire car il faut pouvoir stocker le vecteur des incréments de déformation \(\epsilon (\delta {u}_{i})\) , cependant cette technique de calcul est plus pertinente lorsque la géométrie est remise à jour à chaque itération.
Loi de comportement en torsion#
D’autre part, on choisit une loi de comportement plus complète dans l’expression de la torsion d’une poutre. En effet a montré que la nouvelle expression qui traduit l’influence du gauchissement sur la contrainte normale, permet d’obtenir dans le cas de cornières des résultats en parfaite adéquation avec une modélisation coque. On rajoute donc au moment de torsion, le moment dit «Moment de Wagner». Son calcul fait intervenir le coefficient de Wagner \(K\) déjà cité en ().
Implémentation dans Code_Aster#
Utilisation#
On accède au traitement des grands déplacements pour les poutres multifibres POU_D_TGM en sélectionnant la déformation “GROT_GDEP” sous COMPORTEMENT.
Tous les comportements non linéaires 1D sont disponibles.
Développement#
Matrice de correction#
L’expression de la matrice de correction due à la prise en compte de rotations modérées est donnée en (). Elle intervient à la fin du calcul de la rigidité tangente, puisqu’elle se présente sous la forme d’un terme tout intégré. Le seul obstacle concerne les moments fléchissants qui constituent ce terme tout intégré, en effet, il s’agit des moments fléchissants aux noeuds de l’élément, alors que l’on ne les connaît qu’aux points de Gauss (suite à l’intégration de la loi de comportement).
Il est donc soit possible d’utiliser le calcul de \({W}_{int}^{1}\) pour en extraire les moments ou alors d’interpoler les valeurs aux noeuds à l’aide d’un polynôme d’ordre 2. C’est cette dernière solution qui a été choisie, car au début de chaque pas de temps, il n’est pas possible d’extraire ces valeurs à partir du travail, car ce dernier n’est pas calculé (au début de chaque pas de temps, seule une matrice de rigidité tangente en vitesse est assemblée pour la phase de prédiction).
Une fois les valeurs interpolées, on se contente donc de corriger la matrice de rigidité géométrique. Cela est fait juste après la fin de la boucle sur les points de Gauss.
Calcul des déformations amélioré#
Comme on l’a signalé, ce calcul n’est pertinent que lorsque l’on met à jour la géométrie de la structure à chaque itération.
Pour pouvoir effectuer ce nouveau calcul, il faut être capable de stocker l’incrément de déformation en chaque point de Gauss et après chaque itération (c’est un vecteur de dimension 7). Ces informations sont stockées dans le champ spécifique aux éléments de structure STRX_ELGA.
Ce champ est également utilisé pour stocker les efforts généralisés car la donnée du seul champ de contraintes par fibres ne peut suffire à remonter aux efforts tranchants, au moment de torsion et au bi-moment.
Validation#
La validation du nouvel élément est effectuée en 3 temps. D’abord on compare les résultats obtenus sur des cas-tests disposant de solutions analytiques(essentiellement plans), puis sur des cas-tests académiques(3D) et enfin sur des résultats expérimentaux.
Cas-tests analytiques#
Poutre en flambement (SSNL502)#
Ce test représente un calcul de stabilité d’une poutre console soumise à un effort de compression à une extrémité. Il permet de valider la modélisation dans le domaine quasi-statique non linéaire en grands déplacements et en présence d’instabilité (Flambement d’Euler).
Plaque cantilever soumise à un moment (SSNV138)#
Ce test constitue le calcul quasi-statique d’une plaque élastique encastrée sur un côté et soumise à un moment de flexion à l’autre côté, conduisant à de grands déplacements dans le plan.
Équilibre en configuration déformée d’une poutre multi-fibres (SSLL109)#
Ce test représente un calcul d’équilibre en configuration déformée d’une poutre multi-fibres. Ce test valide l’option RIGI_GEOM=’OUI’.
Cas-tests académiques#
Grands déplacements de l’arc à angle d’ouverture 45° (SSNL136)#
Dans ce test, on étudie un arc plan d’ouverture 45° encastré à une extrémité et soumis à un effort de flexion perpendiculairement à son plan à l’autre extrémité. Ce test, très sévère, permet de valider l’élément de poutre multi-fibres dans le domaine non linéaire géométrique des grands déplacements et des grandes rotations.
Déversement d’une lame-équerre (SSNL133)#
Une structure en forme de L composée de deux poutres élancées de section rectangulaire mince est soumise à une force à une extrémité et est encastrée à l’autre extrémité. Le domaine du test est celui de la mécanique élastique non linéaire en grands déplacements et grandes rotations, avec instabilité du type déversement de poutre.
Ruine élasto-plastique du portique de Lee (SSNL134)#
Ce test a pour but de valider simultanément les possibilités non linéaires matériau et géométrique de l’élément de poutre multi-fibres. L’élément est mis en œuvre sur un cas-test couramment traité dans la littérature en ce qui concerne le comportement élastique car il présente une réponse complexe avec des snap-back et des snap-through: c’est le portique de Lee. On suppose ici un comportement élasto-plastique du portique, ce qui permet de tester la bonne intégration de la loi de comportement des éléments multi-fibres mais aussi le traitement correct des grands déplacements.
Validation expérimentale#
La console MEKELEC (SSNL135)#
MEKELEC désigne une structure réalisée en 1991 à partir d’une console de pylône P4T. Les dimensions et les profils utilisés ont été adaptés à la réalisation d’essais. On souhaitait à l’époque établir une base de résultats expérimentaux précis en vue de valider les résultats des simulations.
La validation consiste à comparer les charges de ruine expérimentales et numériques de 3 cas de chargement.