v6.03.112 FORMA10 - Travaux pratiques de la formation « Utilisation avancée » : trajet de chargement#
Résumé:
Ce test illustre, sur un point matériel, l’influence de trajet de chargement sur la réponse d’un comportement élastoplastique. Il met en évidence les effets de discrétisation en temps. Il s’inspire du test SSNP15: un point matériel, constitué d’un matériau plastique à écrouissage isotrope linéaire, est soumis à la fois à un effort de traction et de cisaillement. L’intérêt principal de ce test réside dans le caractère non radial du chargement.
La modélisation A correspond au calcul à force imposée, avec le comportement VMIS_ISOT_LINE, et illustre l’influence d’une discrétisation en temps grossière par comparaison à la solution obtenue avec un pas de temps plus fin. Pour obtenir une solution avec un pas de temps plus fin, on force le re-découpage du pas de temps sur un critère basé sur l’incrément de la plasticité cumulée (modélisation B).
Solution de référence#
Méthode de calcul utilisée pour la solution de référence#
Elle est identique à celle du test SSNP15.
Dans le plan \((\sigma ,\tau \sqrt{3})\) , la norme de vonMises se traduit par la distance classique, si bien qu’on peut immédiatement prédire les phases de charge et de décharge lors du trajet de chargement, puisqu’il s’agit respectivement des phases où la norme croît ou bien décroît:

Démarche de résolution#
Mécaniquement, il s’agit d’un test \(\mathrm{0D}\) piloté en contrainte, le matériau étant élastoplastique avec critère de vonMises et écrouissage isotrope linéaire. Pour un chargement piloté en contrainte, on détermine aisément la déformation plastique cumulée:
\(F(\sigma ,p)={\sigma}_{\mathrm{eq}}-{\sigma}^{Y}-R'p\le 0\Rightarrow p=\frac{{\sigma}_{\mathrm{eq}}-{\sigma}^{Y}}{R'}\) en charge éq 2.1.1-2.1.1-1
L’intégration de la déformation plastique est bien entendu plus délicat. L’équation d’écoulement s’écrit:
\(\dot{{\varepsilon}^{p}}=\frac{3}{2}\dot{p}\frac{\tilde{\sigma}}{{\sigma}_{\mathrm{eq}}}\Rightarrow \dot{{\varepsilon}^{p}}=\frac{3}{2R'}\frac{\dot{{\sigma}_{\mathrm{eq}}}}{{\sigma}_{\mathrm{eq}}}\tilde{\sigma}\) en charge éq 2.1.1-2.1.1-2
Enfin, on déduira la déformation via la relation d’état:
\(\varepsilon ={\varepsilon}^{p}+{E}^{-1}:\sigma \Rightarrow {\varepsilon}_{xx}={\varepsilon}_{xx}^{p}+\frac{\sigma}{E}\) et \({\varepsilon}_{xy}={\varepsilon}_{xy}^{p}+\frac{\tau}{2\mu }\) éq 2.1.1-2.1.1-3
Traitement de la phase de chargement radial#
Remarquons qu’en phase de chargement radial, la loi d’écoulement [éq 2.1.2-1] s’intègre directement:
\({\varepsilon}^{p}=\frac{3}{2}p\frac{\tilde{\sigma}}{{\sigma}_{\mathrm{eq}}}\) éq 2.1.2-1
La déformation plastique cumulée est alors donnée par [éq 2.1.1-1], la déformation plastique par [éq2.1.2-1] et la déformation totale par [éq 2.1.1-3]. Avec:
\(E\) |
\(=\mathrm{195 000 }\mathrm{MPa}\) |
\(2\mu\) |
\(=\mathrm{150 000 }\mathrm{MPa}\) |
\(R’\) |
\(=\mathrm{1 949, 29 }\mathrm{Mpa}\) |
On obtient: |
|||||
\(p(A)\) |
\(={\mathrm{2, 0547 10}}^{-2}\) |
\({\varepsilon}_{xx}^{p}(A)\) |
\(={\mathrm{1, 4054 10}}^{-2}\) |
\({\varepsilon}_{xx}(A)\) |
\(={\mathrm{1, 4830 10}}^{-2}\) |
\({\varepsilon}_{xy}^{p}(A)\) |
\(={\mathrm{1, 2981 10}}^{-2}\) |
\({\varepsilon}_{xy}(A)\) |
\(={\mathrm{1, 3601 10}}^{-2}\) |
Traitement de la phase de chargement non radial#
Dans la phase de chargement non radial \(\mathrm{B0}-B\) , on peut paramétrer le trajet de contrainte par:
\(\sigma (q)={\sigma}^{{B}^{0}}+q\underset{\text{direction fixe}}{\underset{\underbrace{}}{({\sigma}^{B}-{\sigma}^{{B}^{0}})}}\) avec \(0\le q\le 1\) éq 2.1.3-1
Comme le trajet de chargement reste confiné dans le plan traction-cisaillement \((\sigma ,\tau )\) , on aura intérêt à représenter l’état de contrainte par un nombre complexe:
\(\Sigma =\sigma +i\sqrt{(3)}\tau \Rightarrow {\sigma}_{\mathrm{eq}}=∣(\Sigma )∣\) et \(\Sigma (q)={\Sigma}^{{B}^{0}}+q\underset{\text{direction fixe}}{\underset{\underbrace{}}{({\Sigma}^{{B}^{0}}-{\Sigma}^{B})}}\) éq 2.1.3-2
L’intégration de la loi d’écoulement [éq 2.1.1-2], suivie d’une intégration par partie, permet d’exprimer la déformation plastique:
\(\frac{\mathrm{2R}'}{3}{\left[{\varepsilon}^{p}\right]}_{0}^{1}=\underset{0}{\overset{1}{\int}}\frac{\dot{{\sigma}_{\mathrm{eq}}}}{{\sigma}_{\mathrm{eq}}}\tilde{\sigma}\mathrm{dq}={\left[\ln({\sigma}_{\mathrm{eq}})\tilde{\sigma}\right]}_{0}^{1}-\frac{1}{2}\underset{{\tilde{\sigma}}^{B}-{\tilde{\sigma}}^{{B}^{0}}}{\underset{\underbrace{}}{\dot{\tilde{\sigma}}}}\underset{0}{\overset{1}{\int}}\ln({\sigma}_{\mathrm{eq}}^{2})\mathrm{dq}\)
L’adoption du plan complexe permet un calcul aisé de la dernière intégrale:
\(\underset{0}{\overset{1}{\int}}\ln({\sigma}_{\mathrm{eq}}^{2})\mathrm{dq}=\underset{0}{\overset{1}{\int}}\ln(\Sigma \overline{\Sigma})\mathrm{dq}=\underset{0}{\overset{1}{\int}}\ln(\Sigma )\mathrm{dq}+\underset{0}{\overset{1}{\int}}\ln(\overline{\Sigma})\mathrm{dq}=2\Re \left[\underset{0}{\overset{1}{\int}}\ln(\Sigma )\mathrm{dq}\right]=2\Re {\left[\frac{\Sigma \ln(\Sigma )-\Sigma }{{\Sigma}^{B}-{\Sigma}^{{B}^{0}}}\right]}_{0}^{1}\)
Finalement, l’incrément de déformation plastique sur le trajet \(\mathrm{B0}-B\) vaut:
\({\left[{\varepsilon}^{p}\right]}_{{B}^{0}}^{B}=\frac{3}{2R'}{\left[\ln({\sigma}_{\mathrm{eq}})\tilde{\sigma}\right]}_{{B}^{0}}^{B}-\frac{3}{2R'}\Re {\left[\frac{\Sigma \ln(\Sigma )-\Sigma }{{\Sigma}^{B}-{\Sigma}^{{B}^{0}}}\right]}_{{B}^{0}}^{B}({\tilde{\sigma}}^{B}-{\tilde{\sigma}}^{{B}^{0}})\) éq 2.1.3-4
Résultats de référence#
En calculant la déformation plastique cumulée par [éq 2.1.1-1], la déformation plastique par [éq 2.1.3-4] et la déformation totale par [éq 2.1.1-3], on obtient:
\(p(B)\) |
\(={\mathrm{4, 2329 10}}^{-2}\) |
\({\varepsilon}_{xx}^{p}(B)\) |
\(={\mathrm{3, 3946 10}}^{-2}\) |
\({\varepsilon}_{xx}(B)\) |
\(={\mathrm{3, 5265 10}}^{-2}\) |
On obtient: |
\({\varepsilon}_{xy}^{p}(B)\) |
\(={\mathrm{2, 0250 10}}^{-2}\) |
\({\varepsilon}_{xy}(B)\) |
\(={\mathrm{2, 0471 10}}^{-2}\) |
On s’intéressera aux valeurs des contraintes, des déformations et de la déformation plastique cumulée aux points \(A\) et \(B\) du trajet de chargement.
Références bibliographiques#
Société Française des Mécaniciens. Guide de validation des progiciels de calcul de structures (VPCS). AFNOR Technique, 1990.
Modélisation A#
Caractéristiques de la modélisation#
Il s’agit d’un test sur point matériel. On utilise pour cela la commande SIMU_POINT_MAT, qui permet le calcul sur un seul élément, avec un seul point d’intégration.
Le trajet de chargement entre le point \(A\) et le point \(B\) est discrétisé en 5 pas de temps.
Grandeurs testées et résultats#
Identification |
Instants |
Référence |
Aster |
\(\text{\%}\) différence |
\({\varepsilon}_{xx}\) |
\(A\) |
1.4830 10–2 |
1.48297 10–2 |
–0.002 |
\({\varepsilon}_{xy}\) |
\(A\) |
1.3601 10–2 |
1.360110–2 |
0.003 |
\({\varepsilon}_{xx}\) |
\(B\) |
3.5265 10–2 |
3.5686 10–2 |
1.2 |
\({\varepsilon}_{xy}\) |
\(B\) |
2.0471 10–2 |
1.9577 10–2 |
–4.3 |
Modélisation B#
Caractéristiques de la modélisation#
Il s’agit d’un test sur point matériel. On utilise pour cela la commande SIMU_POINT_MAT, qui permet le calcul sur un seul élément, avec un seul point d’intégration.
Le trajet de chargement entre le point \(A\) et le point \(B\) est discrétisé en 1 pas de temps. Mais on utilise une fonctionnalité assez récente qui permet de re-découper le pas de temps si un critère supplémentaire n’est pas vérifié à convergence. Ici, on se propose de vérifier qu’à chaque convergence, l’incrément de déformation plastique cumulée ne dépasse par 0,2 10-2. Dès que ce critère n’est pas satisfait, alors le code re-découpe automatique le pas de temps et recommence jusqu’à ce que ce critère soit satisfait.
A titre indicatif, on réalise ainsi 25 calculs entre le point \(A\) et le point \(B\) , cette discrétisation temporelle est donc qualifiée de fine, comparée à celle utilisée à la modélisation A.
On rappelle que le point \(A\) correspond à l’instant \(t=\mathrm{1s}\) et le point \(B\) correspond à l’instant \(t=\mathrm{2s}\) .
Grandeurs testées et résultats#
Identification |
Instants |
Référence |
\(\text{\%}\) différence |
\({\varepsilon}_{xx}\) |
\(A\) |
1.4830 10–2 |
–0.002 |
\({\varepsilon}_{xy}\) |
\(A\) |
1.3601 10–2 |
0.003 |
\({\varepsilon}_{xx}\) |
\(B\) |
3.5265 10–2 |
0.39 |
\({\varepsilon}_{xy}\) |
\(B\) |
2.0471 10–2 |
1.1 |
On peut constater graphiquement sur la la différence sur la déformation \({\varepsilon}_{xy}\) entre une discrétisation temporelle fine (modélisation B) et une discrétisation temporelle grossière (5 pas de temps, modélisation A). Cette différence n’existe que pour la partie non radiale du chargement (au-delà du point \(A\) ). On voit nettement que pour la modélisation B, le pas de temps devient assez petit à l’approche du point \(B\) , juste avant l’instant \(t=\mathrm{2s}\) .
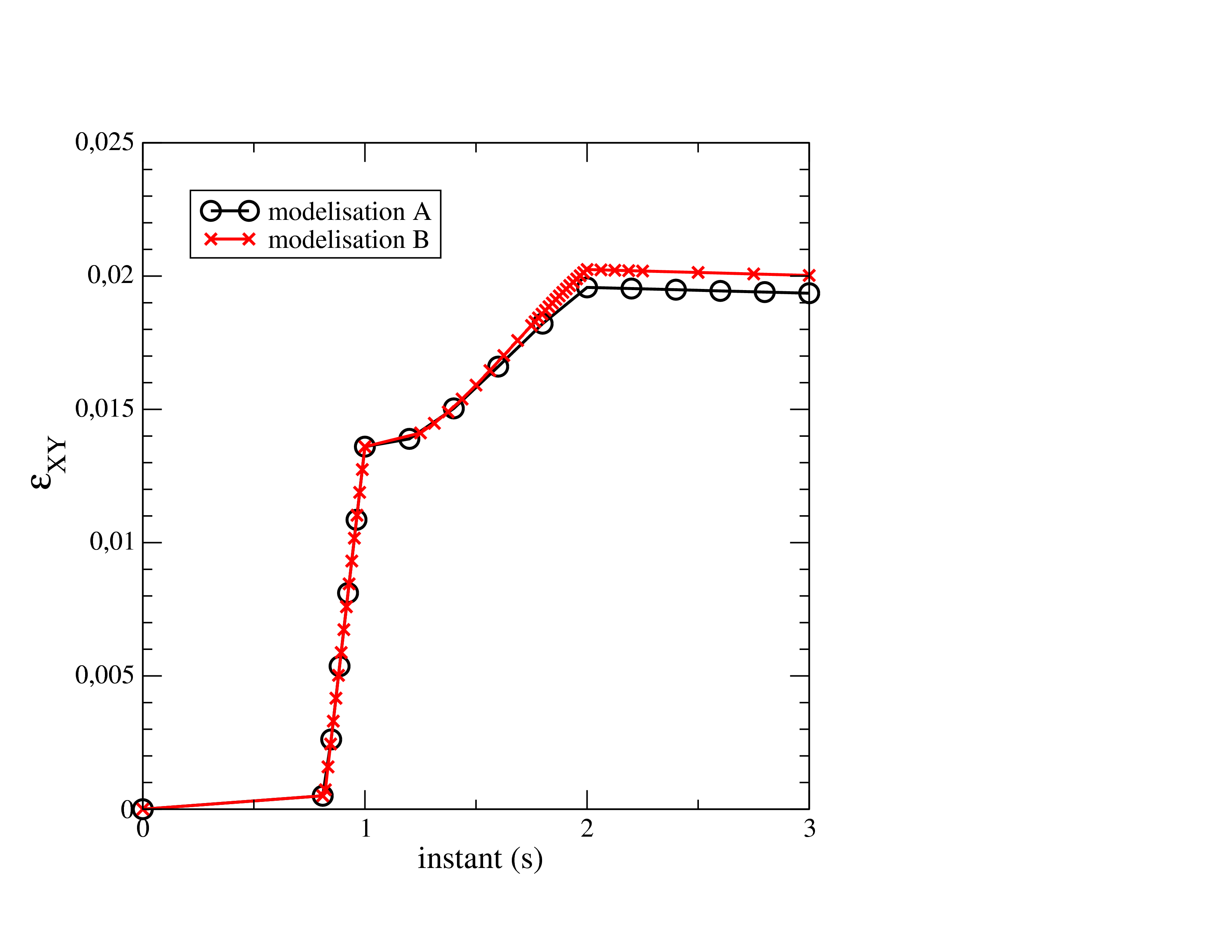
Figure 4.2-1: comparaison entre différentes discrétisations temporelles
Synthèse des résultats#
Ce test permet de mettre en évidence, sur un problème élasto-plastique non radial, l’influence de la discrétisation en temps.