r7.01.04 Loi de comportement ENDO_ISOT_BETON#
Résumé:
Cette documentation présente l’écriture théorique et l’intégration numérique de la loi de comportement ENDO_ISOT_BETON qui décrit un mécanisme d’endommagement local asymétrique des bétons, avec effet de restauration de rigidité.
Loi de comportement#
Écriture théorique#
Si l’on cherche à tenir compte de l’effet de refermeture, il faut porter une grande attention à la continuité des contraintes en fonction des déformations (ce qui est une condition indispensable pour une loi de comportement dans un logiciel de calcul par éléments finis), confer [bib1]. En effet, si l’on modélise cet effet de façon trop simpliste, la loi de comportement a de grande chance de présenter une réponse discontinue.
Pour tenir compte de la refermeture (i.e. la transition entre traction et compression), il faut commencer par décrire finement ce que l’on appelle traction et compression, sachant qu’en traction (resp. compression) la fissure sera considérée «ouverte» (resp. «fermée»). Une solution naturelle est de se placer dans un repère propre de déformation. Dans un tel repère, l’énergie libre élastique s’écrit (\(\lambda\) et \(\mu\) désignant les coefficients de Lamé):
\(\Phi (\varepsilon )\frac{\lambda}{2}{(\mathit{tr}\varepsilon )}^{2}+\mu \sum_{i}{\varepsilon}_{i}^{2}\) éq 2.1-1
On peut alors définir:
une traction ou compression volumique, suivant le signe de \(t\varepsilon\) ,
une traction ou compression dans chaque direction propre, suivant le signe de \({\varepsilon}_{i}\) .
Suivant le principe assez raisonnable suivant - dans un cas de traction («fissure ouverte»), on corrige l’énergie élastique d’un facteur d’endommagement ; dans un cas de compression («fissure fermée»), on garde l’expression de l’énergie élastique -, l’énergie libre endommageable s’écrit:
\(\Phi (\varepsilon ,d)=\frac{\lambda}{2}{(\mathrm{tr}\varepsilon )}^{2}(H(-\mathrm{tr}\varepsilon )+\frac{1-d}{1+\gamma d}H(\mathrm{tr}\varepsilon ))+\mu \sum_{i}{\varepsilon}_{i}^{2}(H(-{\varepsilon}_{i})+\frac{1-d}{1+\gamma d}H({\varepsilon}_{i}))\) éq 2.1-2
On remarque que l’énergie libre est continue à chaque changement de régime. Elle est même continûment dérivable par rapport aux déformations, puisqu’elle est somme de fonctions dérivables (la fonction \({x}^{2}H(x)\) est dérivable) et la continuité des dérivées partielles aux points \(t\varepsilon =0\) et \({\varepsilon}_{i}=0\) est immédiate. On explicite alors les contraintes (en sachant qu’elles seront partout des fonctions continues des déformations). Comme en élasticité, le repère propre des contraintes coïncide avec le repère propre des déformations, résultat démontré en annexe.
On écrit les contraintes dans le repère propre:
\({\sigma}_{ii}=\lambda (\mathit{tr}\varepsilon )(H(-\mathit{tr}\varepsilon )+\frac{1-d}{1+\gamma d}H(\mathit{tr}\varepsilon ))+2\mu {\varepsilon}_{ii}(H(-{\varepsilon}_{ii})+\frac{1-d}{1+\gamma d}H({\varepsilon}_{ii}))\) éq 2.1-3
Sous cette forme, la continuité des contraintes vis-à-vis des déformations est claire. La figure ci-contre montre la contrainte \({\sigma}_{11}\) dans le plan \(({\varepsilon}_{1,}{\varepsilon}_{2})\) à endommagement constant (cas 2D, déformation plane). L’effet de la refermeture ainsi que la continuité des contraintes sont bien visibles.
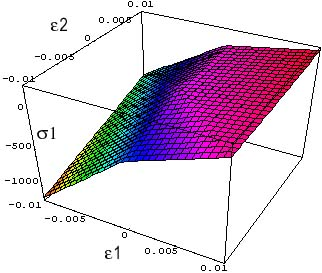
Figure 2-a: illustration de la continuité.
La force thermodynamique \({F}^{d}\) associée à la variable interne d’endommagement s’écrit:
\({F}^{d}=-\frac{\partial \Phi }{\partial d}=\frac{1+\gamma }{{(1+\gamma d)}^{2}}(\frac{\lambda}{2}{(\mathit{tr}\varepsilon )}^{2}H(\mathit{tr}\varepsilon )+\mu \sum_{i}{\varepsilon}_{i}^{2}H({\varepsilon}_{i}))\) éq 2.1-4
Il reste à définir l’évolution de l’endommagement. Le schéma retenu est celui des modèles standards généralisés. Il faut se définir un critère, que l’on prend sous la forme:
\(f({F}^{d})={F}^{d}(\varepsilon ,d)-k\) éq 2.1-5
où k définit le seuil d’endommagement. Afin de prendre en compte, au niveau de l’évolution de l’endommagement, l’effet de confinement, le seuil \(k\) dépend de l’état de déformation, sous la forme:
\(k={k}_{0}-{k}_{1}(\mathit{tr}\varepsilon )H(-\mathit{tr}\varepsilon )\) éq 2.1-6
On s’astreint à rester dans le domaine:
\(f({F}^{d})\le 0\) éq 2.1-7
L’évolution de la variable d’endommagement est alors déterminée par les conditions de Kuhn-Tucker:
\(\lbrace \begin{array}{c}\dot{d}=0\mathit{pour}f<0\\ \dot{d}\ge 0\mathit{pour}f=0\end{array}\) éq 2.1-8
Pour une sollicitation uniaxiale, la courbe résultante est montrée dans la figure 2-b, pour deux valeurs du confinement (voir paragraphe 2.3.2.2). En compression, le comportement reste approximativement linéaire, ce qui ne représente le comportement du matériau que jusqu’à 3-4 fois la valeur de la résistance (uniaxiale) à la traction, ici \(\mathit{SYT}\) . Il est clair que l’utilisation de la loi est alors indiqué tant qu’on reste dans cette borne. Dans la figure 2-b, l’éprouvette est d’abord chargée en traction et subit ainsi un endommagement. Ensuite, elle est déchargée et chargée à la suite en compression dans la même direction. On remarquera donc la reprise de rigidité en compression (refermeture de fissure).
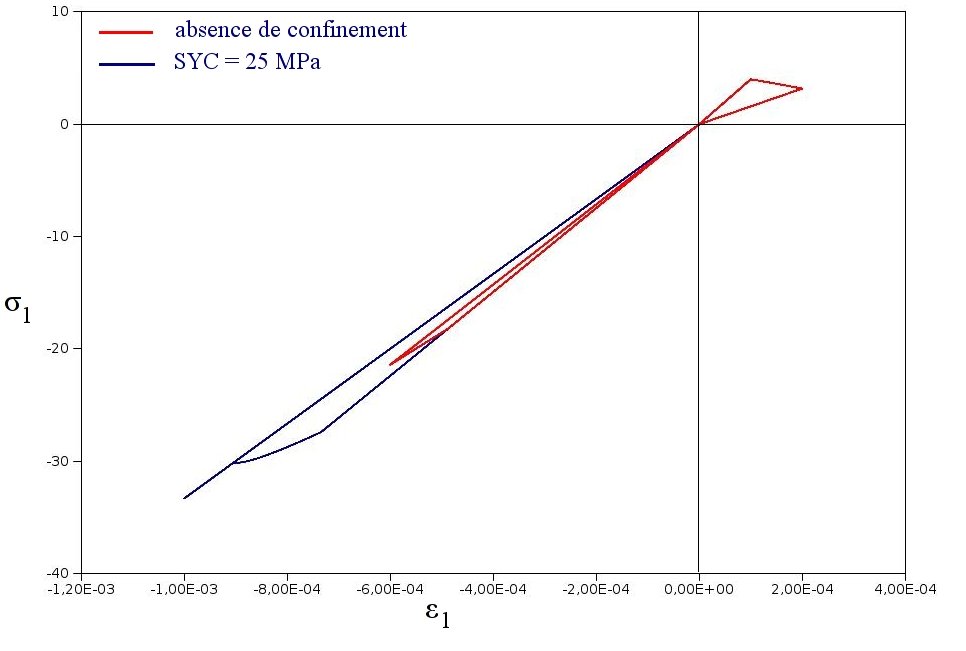
Figure 2-b: réponse à une sollicitation uniaxiale.
On constate qu’en charge pure uniaxiale endommageante (\(\dot{d}\ge 0\) ), la force thermodynamique s’exprime: \({F}^{d}(d)=-E\frac{{\varepsilon}^{2}.{\xi}_{,d}(d)}{2}\) , ayant noté \(\xi (d)=\frac{1-d}{1+\gamma d}\) . La condition de cohérence s’écrit alors:
\(\dot{f}=-E\varepsilon \dot{\varepsilon}{\xi}_{,d}-E\frac{{\varepsilon}^{2}\dot{d}{\xi}_{,\mathrm{dd}}}{2}=0\) éq 2.1-9
D’où: \(\dot{d}=-\frac{2\dot{\varepsilon}{\xi}_{,d}}{\varepsilon {\xi}_{,\mathrm{dd}}}\) et donc la loi de charge membranaire pure uniaxiale endommageante est:
\(\dot{\sigma}=E({\xi}_{,d}\dot{d}\varepsilon +{\xi}_{\dot{\varepsilon}})=E\dot{\varepsilon}(\xi -2\frac{{\xi}_{,d}^{2}}{{\xi}_{,\mathrm{dd}}})=\frac{-E}{\gamma}\dot{\varepsilon}\) éq 2.1-10
ce qui permet d’interpréter le rôle du paramètre \(\gamma\) : la pente étant constante, ce qui est la justification de la forme algébrique de la fonction \(\xi\) .
Remarque:
D’un point de vue formel, les matériaux standard généralisés sont caractérisés par un potentiel de dissipation fonction positivement homogène de degré 1, transformée de Legendre-Fenchel de la fonction indicatrice du domaine de réversibilité, qui vaut donc ici:
\(\Delta (\dot{d})=\underset{{F}^{d}/f({F}^{d})\le 0}{\sup}{F}^{d}\dot{d}=k\dot{d}+{I}_{{\mathit{IR}}^{+}}(\dot{d})\) éq 2.1-11
On notera la présence d’une fonction indicatrice portant sur \(\dot{d}\) , qui assure que l’endommagement est croissant.
Il reste encore à prendre en compte le fait que l’endommagement est majoré par 1. D’un point de vue intuitif, cela semble facile. Pour garder une écriture intégralement compatible avec le formalisme standard généralisé, il suffit d’introduire une fonction indicatrice du domaine admissible dans l’expression de l’énergie libre:
\(\begin{array}{cc}\Phi (\varepsilon ,d)=& \frac{\lambda}{2}{(\mathit{tr}\varepsilon )}^{2}(H(-\mathit{tr}\varepsilon )+\frac{1-d}{1+\gamma d}H(\mathit{tr}\varepsilon ))+\\ & \mu \sum_{i}{\varepsilon}_{i}^{2}(H(-{\varepsilon}_{i})+\frac{1-d}{1+\gamma d}H({\varepsilon}_{i}))+{I}_{\left]-\infty ;1\right]}(d)\end{array}\) éq 2.1-12
L’introduction de cette fonction indicatrice empêche l’endommagement de dépasser 1, en effet, pour \(d=1\) , :math:`{F}^{d}=frac{-partial f}{partial d}=-infty ` , et l’endommagement n’évolue plus.
Prise en compte du retrait et de la température#
La loi de comportement prend en compte un éventuel retrait de dessiccation, un éventuel retrait endogène et une éventuelle déformation thermique. La déformation \(\varepsilon\) dont il est question dans ce document étant alors la «déformation élastique» \(\tilde{\varepsilon}=\varepsilon -{\varepsilon}^{\mathit{th}}-{\varepsilon}^{\mathit{rd}}-{\varepsilon}^{\text{re}}\) .
En revanche, les paramètres matériaux dont il sera question au prochain paragraphe sont considérés comme des constantes (en particulier, ils ne peuvent pas dépendre de la température, dans l’état de développement actuel)
Identification des paramètres#
Les paramètres de la loi de comportement sont au nombre de 4 ou 5 (voir paragraphes suivants). Ils sont classiquement fournis dans l’opérateur DEFI_MATERIAU.
Paramètres élastiques#
Ce sont les plus simples: il s’agit des deux paramètres classiques, module de Young et coefficient de Poisson, fournis sous le mot-clé ELAS ou ELAS_FO de DEFI_MATERIAU.
Paramètres d’endommagement#
Suivant que l’utilisateur veut utiliser la dépendance du seuil avec le confinement ou pas, il faut fournir 2 ou 3 paramètres pour contrôler la loi d’endommagement.
Utilisation sans dépendance au confinement#
Dans ce cas, on considère que le paramètre \({k}_{1}\) est nul. Il est à noter que l’état de compression du béton doit rester modéré pour que la loi reste valable (contrainte en compression de l’ordre de quelques fois la contrainte au pic de traction, en valeur absolue).
L’utilisateur doit renseigner, sous le mot-clé BETON_ECRO_LINE de DEFI_MATERIAU, les valeurs de:
SYT: limite de la contrainte en traction simple,
D_SIGM_EPSI: pente de la courbe post-pic en traction.
La valeur de SYC est alors calculé automatiquement pour avoir k1=0 et prends sa valeur minimale, soit :
\(\mathit{SYC}=\mathit{SYT}\sqrt{\frac{1+\nu -2{\nu}^{2}}{2{\nu}^{2}}}\)
Utilisation avec dépendance au confinement#
Dans ce cas, la dépendance au confinement permet au béton de garder un comportement réaliste en compression jusqu’à l’ordre de grandeur d’apparition de la non linéarité en compression, donnée par SYC, Cf. ci-dessous (classiquement, une contrainte en compression de l’ordre de dix fois la contrainte au pic de traction, en valeur absolue).
L’utilisateur doit renseigner, sous le mot-clé BETON_ECRO_LINE de DEFI_MATERIAU, les valeurs de:
SYT: limite de la contrainte en traction simple,
SYC: limite de la contrainte en compression simple,
D_SIGM_EPSI: pente de la courbe post-pic en traction.
La figure 2-b montre le comportement avec deux valeurs du confinement. L’augmentation du paramètre SYC a comme effet de prolonger le comportement linéaire du matériau.
Passage des valeurs « utilisateur » aux valeurs « modèle »#
Pour information, on obtient les valeurs de \(\gamma\) , \({k}_{0}\) et éventuellement \({k}_{1}\) (si l’utilisateur a renseigné SYC) par les formules suivantes, cf. [éq 2.1-10]:
\(\gamma =\frac{-E}{\text{D\_SIGM\_EPSI}}\)
\({k}_{0}={(\mathrm{SYT})}^{2}(\frac{1+\gamma }{2E})(\frac{1+\nu -2{\nu}^{2}}{1+\nu })\)
\({k}_{1}=\mathrm{SYC}\frac{(1+\gamma ){\nu}^{2}}{(1+\nu )(1-2\nu )}-{k}_{0}\frac{E}{(1-2\nu )(\mathrm{SYC})}\)
Intégration numérique#
Deux points sont à régler avant d’implanter le modèle : le premier concerne l’évaluation de l’endommagement ; le second consiste à calculer la matrice tangente, calcul rendu un peu plus délicat que d’habitude par le passage dans un repère propre de déformation.
On se place ici dans le cadre de l’intégration implicite des lois de comportement. La dépendance du critère en fonction du confinement [éq 2.1-6] est prise en compte sous forme explicite, i.e. le seuil \(k\) est entièrement déterminé par l’état de déformation du pas précédent, ceci pour simplifier l’intégration du modèle.
Évaluation de l’endommagement#
Comme on va le voir, une simple équation scalaire permet d’obtenir l’endommagement, ce qui permet d’éviter un recours aux méthodes itératives.
On note \({d}^{-}\) l’endommagement au pas précédent et \({d}^{+}\) l’évaluation de l’endommagement au pas courant à l’itération courante qui sera l’endommagement au pas courant lorsque la convergence sera atteinte. Le plus simple pour évaluer l’endommagement de l’itération courante est de supposer que l’on atteint le critère à l’instant courant, ce qui se traduit par:
\(f({F}^{d})=0\mathrm{\Rightarrow }\frac{1+\nu }{{(1+\gamma d)}^{2}}(\frac{\lambda}{2}{(\mathit{tr}\varepsilon )}^{2}H(\mathit{tr}\varepsilon )+\mu \sum_{i}{\varepsilon}_{i}^{2}H({\varepsilon}_{i}))=k\) éq 2.4.1-1
ce qui donne:
\({d}^{\mathit{test}}=\frac{1}{\gamma}(\sqrt{\frac{1+\gamma }{k}(\frac{\lambda}{2}{(\mathit{tr}\varepsilon )}^{2}H(\mathit{tr}\varepsilon )+\mu \sum_{i}{\varepsilon}_{i}^{2}H({\varepsilon}_{i}))}-1)\) éq 2.4.1-2
3 cas se présentent:
\({d}^{\mathrm{test}}\le {d}^{-}\) : cela veut dire qu’à l’instant courant, le critère n’est pas atteint, on en conclut que \({d}^{+}={d}^{-}\) ,
\({d}^{-}\le {d}^{\mathrm{test}}\le 1\) : le critère est donc atteint, la condition de cohérence implique \({d}^{+}={d}^{\mathrm{test}}\) ,
\({d}^{\mathrm{test}}\ge 1\) : le matériau est alors ruiné en ce point, d’où \({d}^{+}=1\) .
Calcul de la matrice tangente#
La matrice tangente est la somme de deux termes, le premier exprimant la relation contrainte/déformation à endommagement constant, le deuxième étant issu de la condition \(f=0\) . En effet, on peut écrire :
\(\frac{\partial {\sigma}_{ij}}{\partial {\varepsilon}_{kl}}={\left\lbrace \frac{\partial {\sigma}_{ij}}{\partial {\varepsilon}_{kl}}\right\rbrace }_{d={c}^{\mathit{te}}}+\frac{\partial {\sigma}_{ij}}{\partial d}{\left\lbrace \frac{\partial d}{\partial {\varepsilon}_{kl}}\right\rbrace }_{f=0}\) éq 2.4.2-1
Si l’utilisateur demande le calcul avec matrice tangente (Cf. documentation de STAT_NON_LINE, [U4.51.03]), la loi de comportement fournit l’expression donnée par [éq 2.4.2-1]. En revanche, si l’utilisateur demande le calcul avec la matrice de décharge, le loi de comportement fournit la matrice sécante, c’est-à-dire le premier terme du membre de droite de [éq 2.4.2-1].
Matrice tangente à endommagement constant#
Comme nous l’avons souligné précédemment, le calcul de la matrice tangente est un peu délicate du fait de l’écriture du modèle dans le repère propre de déformation. Ainsi, on connaît facilement la matrice tangente à endommagement constant dans le repère propre de déformation, or ce que l’on cherche est cette même matrice tangente dans le repère global.
Dans le cas où l’endommagement n’évolue pas, dans le repère propre de déformation, la matrice recherchée exprime une simple relation d’élasticité dégradée:
\({\left\lbrace \frac{\delta \tilde{{\sigma}_{i}}}{\delta \tilde{{\varepsilon}_{j}}}\right\rbrace }_{d={C}^{\mathit{te}}}=\lambda (H(-\mathit{tr}\varepsilon )+\frac{1-d}{1+\gamma d}H(\mathit{tr}\varepsilon ))+2\mu {\delta}_{ij}(H(-{\varepsilon}_{j})+\frac{1-d}{1+\gamma d}H({\varepsilon}_{j}))\) éq 2.4.2.1-1
Il faut maintenant exprimer le passage du repère global au repère propre de déformations, au moins dans le cas où les valeurs propres de déformation sont différentes. La matrice tangente n’étant nécessaire qu’aux algorithmes de résolution numérique (schéma de Newton), on se permettra, lors du calcul de la matrice tangente (et uniquement dans ce cas) de perturber numériquement d’éventuelles valeurs propres identiques (afin de les rendre distinctes). On remarquera en particulier que cela permet, à endommagement nul, de retrouver la matrice de rigidité élastique.
On note avec un tilde les tenseurs dans le repère propre de déformation (qui, on le rappelle, est aussi le repère propre de contraintes). Par définition, en notant \({U}_{i}\) le vecteur propre associé à la i-ème valeur propre, la matrice changement de base \(Q=({U}_{1}{U}_{2}{U}_{3})\) , on a:
\(\sigma =Q\tilde{\sigma}{Q}^{T}\mathrm{\Rightarrow }\delta {\sigma}_{ij}={Q}_{\text{im}}{Q}_{\text{jm}}\delta \tilde{{\sigma}_{m}}+\delta {Q}_{\text{im}}{Q}_{\text{jm}}\tilde{{\sigma}_{m}}+{Q}_{\text{im}}\delta {Q}_{\text{jm}}\tilde{{\sigma}_{m}}\)
Dans le cas où les valeurs propres de déformation sont distinctes, l’évolution des vecteurs propres et valeurs propres est donnée par(Cf. précédemment [§2]) :
\(\dot{{U}_{j}}.{U}_{k}=\frac{\dot{\tilde{{\varepsilon}_{\mathit{jk}}}}}{\tilde{{\varepsilon}_{j}}-\tilde{{\varepsilon}_{k}}}\) pour \(j\mathrm{\ne }k\) éq 2.4.2.1-2
\(\dot{\tilde{{\varepsilon}_{i}}}=\dot{\tilde{{\varepsilon}_{ii}}}\) pour \(j\mathrm{\ne }k\) éq 2.4.2.1-3
On en déduit aisément \(\delta Q\) :
\(\delta {Q}_{ij}=\sum_{k\mathrm{\ne }j}\frac{\delta \tilde{{\varepsilon}_{\mathit{jk}}}}{\tilde{{\varepsilon}_{j}}-\tilde{{\varepsilon}_{k}}}{({U}_{k})}_{i}=\sum_{k\mathrm{\ne }j}\frac{\delta \tilde{{\varepsilon}_{\mathit{jk}}}}{\tilde{{\varepsilon}_{j}}-\tilde{{\varepsilon}_{k}}}{Q}_{\mathit{ik}}\) éq 2.4.2.1-4
En utilisant ensuite(la dernière expression ne servant qu’à obtenir une matrice clairement symétrique) :
\(\delta \tilde{{\varepsilon}_{ij}}={Q}_{\mathit{ki}}{Q}_{\mathit{lj}}{\varepsilon}_{kl}=\frac{1}{2}({Q}_{\mathit{ki}}{Q}_{\mathit{lj}}+{Q}_{\mathit{li}}{Q}_{\mathit{kj}}){\varepsilon}_{kl}\)
On obtient donc:

éq 2.4.2.1-5
La matrice tangente à endommagement constant s’écrit donc:
\({A}_{ijkl}=\frac{\partial {\sigma}_{ij}}{\partial {\varepsilon}_{kl}}=\sum_{m,n}{Q}_{\text{im}}{Q}_{\text{jm}}{Q}_{\text{kn}}{Q}_{\ln}{\left\lbrace \frac{\delta \tilde{{\sigma}_{m}}}{\delta \tilde{{\varepsilon}_{n}}}\right\rbrace }_{d={C}^{\mathit{te}}}+\frac{1}{2}\sum_{m,n:n\mathrm{\ne }m}(\frac{({Q}_{\text{km}}{Q}_{\ln}+{Q}_{\text{lm}}{Q}_{\text{kn}})({Q}_{in}{Q}_{\text{jm}}{Q}_{\text{jn}}{Q}_{\text{im}})}{\tilde{{\varepsilon}_{n}}-\tilde{{\varepsilon}_{m}}})\tilde{{\sigma}_{m}}\) éq 2.4.2.1-6
Terme de la matrice tangente dû à l’évolution de l’endommagement#
L’expression à évaluer s’écrit:
\(\frac{\partial {\sigma}_{ij}}{\partial d}{\left\lbrace \frac{\partial d}{\partial {\varepsilon}_{kl}}\right\rbrace }_{f=0}\) éq 2.4.2.2-1
On écrit l’équation [éq 2.4.1-1] sous la forme:
\(\frac{1+\gamma }{{(1+\gamma d)}^{2}}\left[W(\varepsilon )\right]=k\) éq 2.4.2.2-2
avec: \(W(\varepsilon )=\frac{\lambda}{2}{(\mathit{tr}\varepsilon )}^{2}H(\mathit{tr}\varepsilon )+\mu \sum_{i}{\varepsilon}_{i}^{2}H({\varepsilon}_{i})\) .
En différentiant cette expression, il vient:
\(-\frac{2\gamma (1+\gamma )}{{(1+\gamma d)}^{3}}W(\varepsilon )\delta d+\frac{1+\gamma }{{(1+\gamma d)}^{2}}{\sigma}^{\mathit{el}}\cdot \delta \varepsilon =0\) éq 2.4.2.2-3
avec: \({\sigma}^{\mathit{el}}=\frac{\partial W}{\partial \varepsilon }\)
On utilise ensuite l’égalité suivante:
\(\frac{\partial \sigma }{\partial d}=-\frac{1+\gamma }{{(1+\gamma d)}^{2}}{\sigma}^{\mathit{el}}\) éq 2.4.2.2-4
On conclut:
\({\left\lbrace \frac{\partial {\sigma}_{ij}}{\partial {\varepsilon}_{kl}}\right\rbrace }_{f=0}=-\frac{1+\gamma }{2\gamma (1+\gamma d)W(\varepsilon )}{\sigma}_{ij}^{\mathit{el}}{\sigma}_{kl}^{\mathit{el}}\) éq 2.4.2.2-5
Cas du matériau complètement endommagé#
Dans le cas du matériau complètement endommagé, \(d=1\) , la rigidité du point matériel peut s’annuler. Cela ne pose nullement problème pour la contrainte; en revanche, cela peut entraîner des pivots nuls dans la matrice de rigidité. Pour pallier cette difficulté, on se permet de définir une rigidité minimale, pour la matrice tangente ou la matrice de décharge. Cette rigidité minimale n’affecte pas la valeur de l’endommagement (qui peut atteindre 1) ou la contrainte (qui peut atteindre 0).
Pour préserver un conditionnement raisonnable de la matrice de rigidité, la rigidité minimale est prise à \({10}^{-5}\) de la rigidité initale. Un indicateur \(\chi\) précise le comportement pendant le pas de temps courant:
\(\chi =0\) : pas d’évolution de l’endommagement au cours du pas,
\(\chi =1\) : évolution de l’endommagement au cours du pas,
\(\chi =2\) : endommagement saturé

.
Description des variables internes#
Le modèle possède deux variables internes:
\(\mathrm{VI}(1)\) : endommagement \(d\) ,
\(\mathit{VI}(2)\) : indicateur \(\chi\)
Pilotage par prédiction élastique#
Le pilotage de type PRED_ELAS contrôle l’intensité du chargement pour satisfaire une certaine équation liée à la valeur de la fonction seuil \({f}^{\mathit{el}}\) lors de l’essai élastique. Par conséquent, seuls les points où l’endommagement n’est pas saturé seront pris en compte. L’algorithme qui prend en charge ce mode de pilotage, cf. [R5.03.80], requiert la résolution en chacun de ces points de Gauss de l’équation scalaire suivante dans laquelle \(\Delta \tau\) est une donnée et \(\eta\) l’inconnue:
\(\tilde{{f}^{\mathit{el}}}(\eta )=\Delta \tau\) éq 4-1
La méthode utilisée jusqu’à la version 8 était la suivante : la fonction \(\tilde{{f}^{\mathit{el}}}\) fournit la valeur de la fonction seuil lors d’un essai élastique lorsque le champ de déplacement se décompose de la manière suivante en fonction du paramètre scalaire \(\eta\) :
\(u={u}_{0}+\eta {u}_{1}\) éq 4-2
où \({u}_{0}\) et \({u}_{1}\) sont donnés. Grâce à la linéarité en petites déformations des opérateurs déformation (calcul des déformations à partir des déplacements) et déformation régularisée, on obtient également les décompositions suivantes:
\(\varepsilon ={\varepsilon}_{0}+\eta {\varepsilon}_{1}\) et \(\stackrel{ˉ}{\varepsilon}=\stackrel{ˉ}{{\varepsilon}_{0}}+\eta \stackrel{ˉ}{{\varepsilon}_{1}}\) éq 4-3
La fonction \({f}^{\mathrm{el}}\) présentant la bonne propriété d’être convexe, l’équation [éq 4-1] présente zéro, une ou deux solutions, qui sont recherchées comme suit:
Détermination du nombre de solutions par étude aux bornes \(\pm \infty ` et éventuellement (si la valeur aux deux bornes est à chaque fois positive) détermination si :math:`{f}^{\mathrm{el}}\) présente un minimum négatif;
Détermination d’un encadrement de chaque solution à partir de l’étude précédente
Détermination de la solution (pour une fonction convexe connaissant l’encadrement, cette recherche est simple et rapide)
Depuis la version 9, pour plus de simplicité d’utilisation, le paramètre \(\Delta \tau\) correspond à l’incrément d’endommagement que l’on cherche à obtenir pour au moins un point de la structure.
On ne cherche alors plus un paramètre de pilotage \(\eta\) qui fasse sortir le critère d’une valeur \(\Delta \tau\) avec l’endommagement issu du pas de temps précédent (cf. Eq 4-1), mais un paramètre \(\eta\) qui nous ramène sur le critère avec un endommagement augmenté de \(\Delta \tau\) :
\({\tilde{f}}^{\text{el}}(\eta ,{d}^{-})=\Delta \tau \mathrm{\Rightarrow }{\tilde{f}}^{\text{el}}(\eta ,{d}^{-}+\Delta \tau )=0\)
Ce coefficient \(\Delta \tau\) est calculé de la manière suivante:
\(\Delta \tau =\frac{\Delta t}{\text{COEF\_MULT}}\)
où \(\Delta t\) correspond à l’incrément de temps défini dans la liste d’instants du calcul et COEF_MULT est le coefficient spécifié par le mot-clé COEF_MULT de l’option PILOTAGE dans l’opérateur STAT_NON_LINE [U4.51.03].
Bibliographie#
P.B. BADEL: Contributions à la simulation numérique de structures en béton armé. Thèse de l’Université Paris VI, 2001.
Fonctionnalités et vérification#
Ce document concerne la loi de comportement ENDO_ISOT_BETON (mot clé COMPORTEMENT de STAT_NON_LINE) et son matériau associé ENDO_ISOT_BETON (commande DEFI_MATERIAU).
Cette loi de comportement est vérifiée par les cas tests suivants:
COMP005cd |
Test du comportement. Simulation en un point matériel. |
Non documenté |
SSLA103e |
Calcul du retrait de dessiccation et du retrait endogène sur un cylindre |
|
SSNS106 |
Endommagement d’une plaque plane sous sollicitations variées avec la loi de comportement GLRC_DM |
|
SSNS108 |
Simulation de l’essai SAFE par la poussée progressive |
|
SSNV149 |
Test de ENDO_ISOT_BETON |
|
SSNV169 |
Couplage fluage – endommagement |
|
WTNV121 |
Mouillage du béton avec une loi d’endommagement |
Description des versions du document#
Indice document |
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
B |
7.4 |
P.Badel EDF-R&D/AMA |
Texte initial |
C |
8.5 |
P.Badel EDF-R&D/AMA |
Correction de signe page 10: il manquait un signe – au second membre de l’équation 2.4.2.2-4 ainsi que dans l’équation suivante 2.4.2.2-5 |
D |
9.4 |
V.Godard EDF-R&D/AMA |
Modification du pilotage par prédiction élastique. |
10.3 |
F.Voldoire EDF-R&D/AMA |
Ajout d’un passage page 5 expliquant la pente en charge uniaxiale. |
Démonstrationdu repère propre de contrainte
Le terme en trace dans l’énergie ne pose pas de problème: il est invariant par tout changement de repère.
Reste le terme en \(\sum_{i}{\varepsilon}_{i}^{2}(H(-{\varepsilon}_{i})+\frac{1-d}{1+\gamma d}H({\varepsilon}_{i}))\) .
Notation : on écrit avec un indice (par exemple \({\varepsilon}_{i}\) ) la \(i\) -ème valeur propre d’un tenseur qui s’écrit (en explicitant ses deux indices) \({\varepsilon}_{kl}\) .
Si les valeurs propres de la déformation sont toutes distinctes, on montre alors que \(\dot{{\varepsilon}_{i}}=\dot{{\varepsilon}_{ii}}\) , avec \(\dot{{\varepsilon}_{kl}}\) les composantes de \(\dot{\varepsilon}\) dans le repère fixe coïncidant avec le repère propre de déformation à l’instant considéré (dans ce repère on a donc \({\varepsilon}_{kl}={\varepsilon}_{k}{\delta}_{kl}\) ).
En effet, écrivons les déformations sous la forme:
\(\varepsilon =\sum_{i}{\varepsilon}_{i}{U}_{i}\otimes {U}_{i}\)
En différentiant cette expression, il vient:
\(\dot{\varepsilon}=\sum_{i}\dot{{\varepsilon}_{i}}{U}_{i}\otimes {U}_{i}+{\varepsilon}_{i}\dot{{U}_{i}}\otimes {U}_{i}+{\varepsilon}_{i}{U}_{i}\otimes \dot{{U}_{i}}\)
En utilisant le fait que les vecteurs propres sont orthonormés:
\({U}_{i}\cdot {U}_{j}={\delta}_{ij}\mathrm{\Rightarrow }\dot{{U}_{i}}\cdot {U}_{j}+{U}_{i}\cdot \dot{{U}_{j}}=0\)
on obtientles variations des valeurs propres et des vecteurs propres:
\(\dot{{\varepsilon}_{i}}=\dot{{\varepsilon}_{ii}}\) et \(\dot{{U}_{j}}\cdot {U}_{k}=\frac{\dot{{\varepsilon}_{\mathit{jk}}}}{{\varepsilon}_{j}-{\varepsilon}_{k}}\) pour \(j\mathrm{\ne }k\)
Ceci n’est évidemment valable que si les valeurs propres sont distinctes (comme on peut le voir clairement sur l’expression des variations des vecteurs propres). Cela vient du fait que les vecteurs propres ne sont pas des fonctions continues des éléments de la matrice.
Dans le cas où deux valeurs propres de déformations sont égales (et en dehors du cas très particulier où elles sont également nulles), elles sont soit positives, soit négatives. Prenons le cas où elles sont positives (l’autre cas se prête à une démonstration en tout point similaire). L’énergie concernant ces deux valeurs propres s’écrit alors: \({\sum}_{i=2}^{3}{\varepsilon}_{i}^{2}\) (les deux valeurs propres égales sont considérées avoir les indices 2 et 3). En différentiant cette expression, on obtient:
\(2\sum_{i=2}^{3}{\varepsilon}_{i}d{\varepsilon}_{i}+2\varepsilon \sum_{i=2}^{3}d{\varepsilon}_{i}\) en notant \(\varepsilon\) la valeur propre commune.
Par invariance de la trace d’une matrice, ici la restriction de la déformation au plan propre considéré, on obtient:
\(\sum_{i=2}^{3}d{\varepsilon}_{i}=\sum_{i=2}^{3}d{\varepsilon}_{ii}\) , quelle que soit l’évolution qu’a subi le repère propre à ce moment.
Pour la valeur propre restante (distincte des deux autres et d’indice 1 avec les notations choisies), on a: \(d{\varepsilon}_{1}=d{\varepsilon}_{11}\) .
En rassemblant ces expressions, on obtient:
\(d(\sum_{i=1}^{3}{\varepsilon}_{i}^{2}H({\varepsilon}_{i}))=d({\varepsilon}_{1}^{2}H({\varepsilon}_{1}))+d(\sum_{i=1}^{3}{\varepsilon}_{i}^{2}H({\varepsilon}_{i}))=2\sum_{i=1}^{3}{\varepsilon}_{ii}H({\varepsilon}_{ii})d{\varepsilon}_{ii}\)
En conclusion, que les valeurs propres soient distinctes ou non, on obtient:
\(d({\sum}_{i}{\varepsilon}_{i}^{2}H({\varepsilon}_{i}))=2{\sum}_{i}{\varepsilon}_{ii}H({\varepsilon}_{ii})d{\varepsilon}_{ii}\) avec les notations adoptées.
Ce raisonnement se généralise facilement au cas de trois valeurs propres égales.
La différentielle de l’énergie à endommagement constant s’écrit alors:
\(\begin{array}{cc}d\Phi (\varepsilon ,d)\mid {d={C}^{\mathit{te}}}_{}=& \lambda (\mathit{tr}\varepsilon )d(\mathit{tr}\varepsilon )(H(-\mathit{tr}\varepsilon )+\frac{1-d}{1+\gamma d}H(\mathit{tr}\varepsilon ))+\\ & 2\mu {\sum}_{i}{\varepsilon}_{ii}d{\varepsilon}_{ii}(H(-{\varepsilon}_{ii})+\frac{1-d}{1-\gamma d}H({\varepsilon}_{ii}))\end{array}\)
Sur cette expression, on observe bien que le repère propre de déformation est aussi repère propre de contrainte.