r7.02.23 Loi de comportement d’interface pour les barrages CZM_FROT_MIX#
Résumé:
Ce document décrit la loi de comportement cohésive CZM_FROT_MIX, modélisant l’ouverture et le glissement d’une interface selon la loi de frottement de Coulomb. CZM_FROT_MIX vise à couvrir la même phénoménologie que JOINT_MECA_FROT pour la modélisation du comportement mécanique des barrages, mais en s’appuyant sur l’élément fini d’interface et une formulation mixte en Lagrangien augmenté (voir [R3.06.13]).
Phénoménologie & Utilisation#
Comportements attendus de CZM_FROT_MIX#
La loi cohésive CZM_FROT_MIX, comme indiqué en introduction, vise à couvrir la même phénoménologie que JOINT_MECA_FROT :
En mode I (traction), l’évolution de la composante normale \(⟦u_n⟧\) du saut de déplacement à l’interface est toujours réversible. La composante normale \(T_n\) du vecteur contrainte évolue proportionnellement à \(⟦u_n⟧\), avec une rigidité normale \(K_n\), jusqu’à atteindre le seuil de résistance maximale en traction, égal à \(c/\mu\), où \(c\) désigne la cohésion et \(\mu\) le coefficient de frottement.
En mode II (cisaillement), l’évolution de la composante tangentielle \(⟦u_t⟧\) du saut de déplacement à l’interface est réversible tant que la composante tangentielle \(T_t\) du vecteur contrainte reste comprise dans l’intervalle ouvert \((-c+\mu T_n; c-\mu T_n)\). Dans ce domaine, \(T_t\) évolue linéairement avec \(⟦u_t⟧\), selon une rigidité tangentielle \(K_t\). Pour \(T_t = \pm (c-\mu T_n)\), l’évolution devient irréversible lorsque le chargement se poursuit, ce qui conduit à un glissement plastique \(\dot{\delta}^p\).
La figure suivante présente ces deux modes de chargement. Dans le plan \((T_n, T_t)\), ils se situent dans le domaine de réversibilité défini par le cône de Coulomb \(f(\vector{T})=\normEucl{\vector{T}_t}+\mu T_n-c\leq 0\).
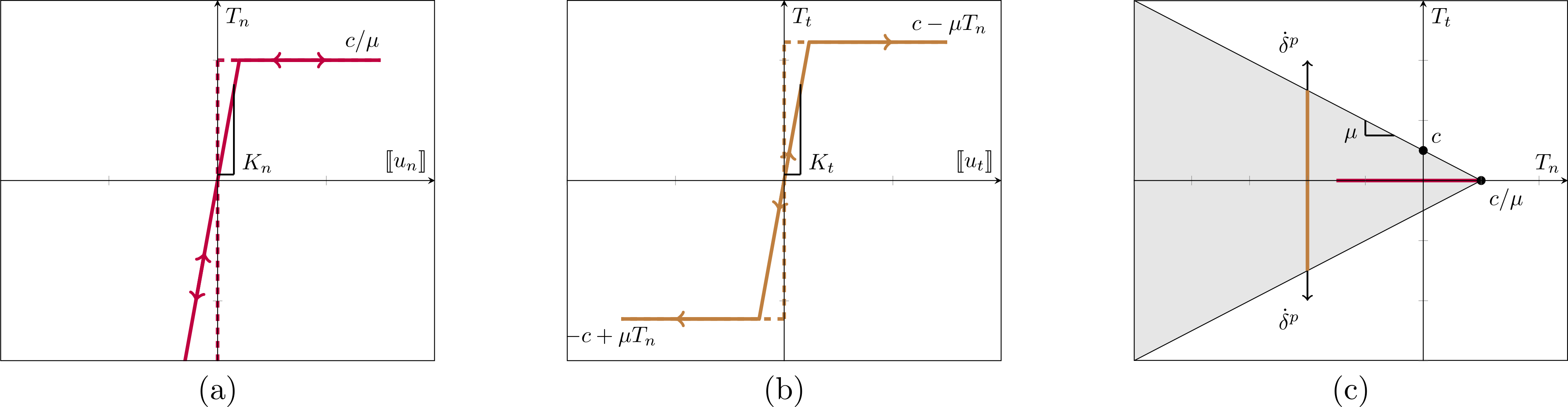
Fig. 422 Comportement de CZM_FROT_MIX : (a) réponse en mode I, (b) réponse en mode II, (c) trajets de chargement et domaine de réversibilité en 2D.#
- Remarque
Contrairement à JOINT_MECA_FROT, traiter le cas de rigidités infiniment grandes \(K_n\) et \(K_t\) (adhérence parfaite) est rendu possible avec CZM_FROT_MIX du fait de la formulation mixte sur laquelle la loi s’appuie. Les réponses associées en modes I et II sont représentées par des lignes discontinues sur la figure précédente, respectivement en (a) et (b).
Paramètres du modèle#
Les paramètres du modèle sont au nombre de six :
Nom |
Symbole |
Intervalle |
Statut |
|---|---|---|---|
RIGI_NOR |
\(K_n\) |
\(\tensFour{R}^+\) |
Facultatif |
RIGI_TAN |
\(K_t\) |
\(\tensFour{R}^+\) |
Facultatif |
COHESION |
\(c\) |
\(\tensFour{R}^+\) |
Obligatoire |
COEF_FROT |
\(\mu\) |
\(\tensFour{R}^+\) |
Obligatoire |
PENA_LAGR_ABSO |
\(r\) |
\(\tensFour{R}^+\) |
Obligatoire |
ADHE |
– |
{ELAS, PARFAITE} |
Obligatoire |
- Remarque
Les valeurs de \(K_n\) et \(K_t\) doivent être renseignées lorsque l’adhérence est élastique linéaire (ADHE = ELAS). En revanche, lorsque l’adhérence est parfaite (ADHE = PARFAITE), ni \(K_n\) ni \(K_t\) n’interviennent dans la résolution des équations de CZM_FROT_MIX. Enfin, \(r\) désigne le coefficient d’augmentation du Lagrangien augmenté de la formulation mixte [R3.06.13].
Variables internes#
Les variables internes stockées sont les sept suivantes :
Nom |
Numéro |
Signification |
|---|---|---|
SAUT_PLAS_1 |
V1 |
Première composante du glissement plastique |
SAUT_PLAS_2 |
V2 |
Seconde composante du glissement plastique (V2 est mis à zéro en 2D) |
SAUT_N |
V3 |
Composante normale du saut de déplacement |
SAUT_T1 |
V4 |
Première composante tangentielle du saut de déplacement |
SAUT_T2 |
V5 |
Seconde composante tangentielle du saut de déplacement (V5 est mis à zéro en 2D) |
INDIPLAS |
V6 |
Indice de glissement plastique (0 si régime réversible, 1 si régime plastique) |
INDIOUV |
V7 |
Indice d’ouverture (0 si \(T_n<c/\mu\), 1 si \(T_n=c/\mu\)) |
- Remarque
Seules V1 et V2 sont de « vraies » variables internes, au sens où elles sont nécessaires à la résolution des équations de comportement discrétisées de CZM_FROT_MIX. Les cinq autres variables sont uniquement destinées au post‑traitement des résultats.
Équations du modèle#
Ce paragraphe présente les équations de comportement de CZM_FROT_MIX. Afin d’en faciliter la lecture, celles-ci sont d’abord exprimées dans leur formulation directe, avant d’être introduites dans leur formulation mixte.
Pour alléger davantage la présentation, les équations sont données uniquement dans le cas d’une adhérence élastique linéaire, pour laquelle les rigidités \(K_n\) et \(K_t\) interviennent explicitement. Le cas d’une adhérence parfaite s’obtient alors naturellement en considérant la limite \(K_n, K_t \rightarrow +\infty\) dans la formulation mixte (ce que le lecteur est invité à vérifier).
Formulation primale#
Soit \(⟦\vector{u}⟧\) le saut de déplacement vu par le volume, et \(\vector{\delta}^p\) le glissement plastique. La relation entre le vecteur contrainte \(\vector{T}\) et le saut de déplacement s’écrit
L’évolution du glissement plastique s’obtient à l’aide de la loi à seuil suivante :
avec \(f(\vector{T})=\normEucl{\vector{T}_t}+\mu T_n-c\) le critère du cône de Coulomb. L’évolution du glissement plastique et la composante tangentielle du vecteur contrainte sont alors colinéaires et de même sens.
Formulation mixte#
Soit \(\vector{\delta}\) le saut de déplacement vu par l’interface, et \(\vector{\lambda}\) les multiplicateurs de Lagrange assurant l’égalité entre \(\vector{\delta}\) et \(⟦\vector{u}⟧\) de manière faible par la formulation mixte des éléments d’interface [R3.06.13]. De manière tout à fait générale, c’est-à-dire indépendamment de la loi cohésive concernée, le vecteur contrainte s’exprime alors comme suit :
où \(\vector{\varphi} = \vector{\lambda} + r⟦\vector{u}⟧\) est une quantité donnée lors de l’intégration du comportement d’interface (car elle ne dépend que des inconnues nodales du problème).
En tenant alors compte des équations (4563) et (4565), le vecteur contrainte et le saut de déplacement vu par l’interface s’expriment par les deux relations suivantes :
Implémentation numérique#
Principe#
Au saut de déplacement \(⟦\vector{u}⟧\) et multiplicateurs de Lagrange \(\vector{\lambda}\) donnés à l’instant actuel \(t_{k+1} = t_k + \Delta t\), et connaissant le glissement plastique \(\vector{\delta}^p_k\) au pas précédent \(t_k\), l’intégration de la loi cohésive se charge de calculer :
Le glissement plastique à l’instant actuel \(\vector{\delta}^p\) ;
Le saut de déplacement vu par l’interface à l’instant actuel \(\vector{\delta}\) ;
La matrice tangente à l’instant actuel \(d\vector{\delta} / d\vector{\varphi}\), rangée comme
où \((\vector{n}, \vector{t}_1, \vector{t}_2)\) définit le repère local de l’interface.
Résolution#
Suivant la méthode classique de résolution de type prédiction élastique – correction plastique, \(\Delta\vector{\delta}^p = \vector{\delta}^p-\vector{\delta}^p_k\), \(\vector{\delta}\) et \(d\vector{\delta} / d\vector{\varphi}\) s’obtiennent à l’aide de l’analyse de la fonction
avec
qui représente la valeur du vecteur contrainte lors d’une évolution réversible à l’instant actuel.
Deux cas de figures sont alors à considérer :
Solution réversible : Si \(Q(0) \leq 0\), la réponse est réversible, et donc \(\Delta\vector{\delta}^p=\vector{0}\). La valeur de \(\vector{\delta}\) s’obtient via l’équation (4566).2 (avec \(\vector{\delta}^p=\vector{\delta}^p_k\)), et la matrice tangente s’écrit
Solution irréversible : Si \(Q(0) > 0\), la réponse présente un glissement plastique :
La valeur de \(\vector{\delta}\) s’obtient toujours via l’équation (4566).2 (avec \(\vector{\delta}^p=\vector{\delta}^p_k+\Delta\vector{\delta}^p\)), et la matrice tangente est
Cas-tests#
La loi CZM_FROT_MIX est vérifiée et validée par le test suivant :