r7.02.11 Lois de comportement cohésives : CZM_xxx_xxx et pilotage du chargement#
Résumé:
Les lois de comportement cohésives :
CZM_EXP_REG (Cohesive Zone Model EXPonentielle REGularisée)
CZM_LIN_REG (Cohesive Zone Model LINéaire REGularisée)
CZM_OUV_MIX (Cohesive Zone Model OUVerture basée sur une formulation MIXte)
CZM_EXP_MIX (Cohesive Zone Model EXPonentielle basée sur une formulation MIXte)
CZM_TAC_MIX (Cohesive Zone Model TAlon-Curnier basée sur une formulation MIXte)
CZM_TRA_MIX (Cohesive Zone Model TRApèze basée sur une formulation MIXte)
CZM_FAT_MIX (Cohesive Zone Model FATigue basée sur une formulation MIXte)
permettent de modéliser l’ouverture d’une fissure en tenant compte d’une force de cohésion entre les lèvres de celle-ci. Une énergie de surface permet de prendre en compte le coût énergétique de l’ouverture de la fissure. Cette dernière est représentée par des éléments finis de joint pour les deux premières et d’interface pour les suivantes.
La loi cohésive CZM_ELAS_MIX constitue une version simplifiée des modèles précédents puisque la réponse reste élastique, avec ou sans contact, et éventuellement avec adhérence normale ou tangentielle. Elle permet entre autres de tester une mise en données avant de passer aux modèles plus avancés.
La loi de comportement CZM_LAB_MIX (Cohesive Zone Model Liaison Acier-Béton basée sur une formulation MIXte) permet par ailleurs de modéliser le glissement des armatures en acier par rapport au béton au sein d’une structure.
Nous présentons ici la forme de l’énergie et de la loi cohésive qui en dérive en fonction du saut de déplacement ainsi que les variables internes du modèle. L’existence d’instabilités potentielles lors de la propagation de fissures peut nécessiter un pilotage par la prédiction élastique dont on présente les éléments spécifiques à ces lois.
Définition des lois cohésives CZM_xxx_REG#
Dans cette partie on présente l’énergie de surface \(\Psi\) ainsi que le vecteur contrainte \(\overrightarrow{\boldsymbol\sigma}\) qui en découle pour les lois cohésives CZM_EXP_REG et CZM_LIN_REG. L’irréversibilité de la fissuration est formulée de la même manière pour chacune d’elles. Par ailleurs, ces lois sont basées sur le modèle de joint qui nécessite la régularisation de l’énergie. Cette dernière est effectuée par pénalisation de l’adhérence.
Energie de surface#
L’énergie de surface \(\Psi\), définie sur une discontinuité \(\Gamma\), dépend du saut de déplacement entre les lèvres de la fissure \(\boldsymbol{\delta}\), et de \(\kappa\), variable interne seuil qui gère l’irréversibilité de la fissuration. Cette dernière mémorise la plus grande norme du saut atteinte au cours de l’ouverture. Sa loi d’évolution entre deux incréments de chargement successifs - et + s’écrit :
L’énergie de surface est définie de la manière suivante :
avec \(H\) fonction de Heaviside et \(I_{\mathbb{R}^+}\) fonction indicatrice traduisant la condition de non interpénétration des lèvres de la fissure :
- Remarque
Dans la norme du saut, on prend la partie positive du saut normal. Cela permet de s’assurer que, lors de la pénalisation du contact, un saut normal négatif ne peut pas contribuer à faire évoluer le seuil (i.e. dissiper de l’énergie).
Suivant la valeur du seuil, l’énergie de surface vaudra \({\Psi}_{dis}\) ou \({\Psi}_{lin}\) . Dans le premier cas on parlera de régime dissipatif (dissipation d’énergie au cours de la fissuration), dans le second cas de régime linéaire (décharge ou recharge linéaire sans dissipation d’énergie). On peut écrire les deux formes de l’énergie de la manière suivante :
avec \({\psi}_{dis}\) et \({\psi}_{lin}\) densités d’énergie de surface.
Présentons en détail les valeurs de ces densités pour chaque loi cohésive.
Densité d’énergie de surface en régime linéaire#
Dans le cas où une fissure existante évolue sans dissiper d’énergie (i.e. \(\|\boldsymbol{\delta}\|_{+}<\kappa\) ), l’élément est dans une phase linéaire (charge ou décharge), le seuil n’évolue pas. On choisit une densité d’énergie fonction quadratique de la norme du saut :
La fonction \(P(\kappa)\) dépend de la loi cohésive :
CZM_EXP_REG :
CZM_LIN_REG :
La fonction \(P(\kappa)\) permet d’assurer la continuité de la dérivée de \(\Psi\) en \(\kappa\) (i.e. la continuité du vecteur contrainte dans l’élément d’un régime à l’autre) et \({C}_{0}\) constante permettant d’assurer la continuité de \(\Psi\) en \(\kappa\) .
Densité d’énergie de surface en régime dissipatif#
En régime dissipatif, (cas où \(\|\boldsymbol{\delta}\|_{+}\ge \kappa\) ), on choisit une densité d’énergie de surface de la forme suivante :
CZM_EXP_REG :
CZM_LIN_REG :
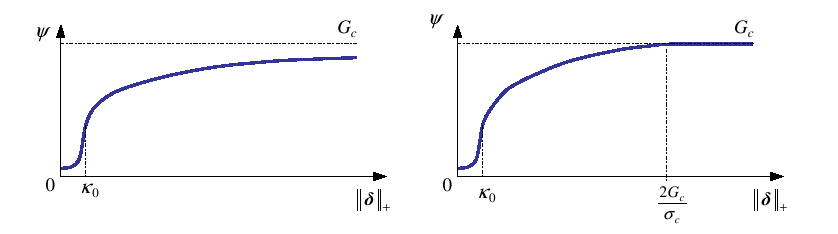
Fig. 319 Densité d’énergie de surface en fonction de la norme du saut de déplacement, loi CZM_EXP_REG à gauche et loi CZM_LIN_REG à droite#
La densité d’énergie de surface \({\psi}_{dis}\) n’est pas dérivable par rapport à \(\boldsymbol{\delta}\) en zéro. Pour contourner ce problème et conserver un traitement local des conditions d’ouverture, on effectue une régularisation de cette dernière au voisinage de zéro. On considère que la variable interne \(\kappa\) n’est pas nulle pour un élément sain, notons \(\kappa_{0}\) sa valeur initiale. L’énergie de surface à l’amorçage, au lieu de valoir \(\Psi(\boldsymbol{\delta},0)={\Psi}_{dis}(\|\boldsymbol{\delta}\|_{+})\) vaudra \(\Psi (\boldsymbol{\delta},\kappa_{0})=\Psi_{lin}(\|\boldsymbol{\delta}\|_{+},\kappa_{0})\) tant que la norme du saut sera inférieure à \(\kappa_{0}\). On représente la densité d’énergie de surface sur la Fig. 319. Celle-ci correspond à une fonction quadratique du saut au voisinage de zéro puis, au-delà de \({\kappa}_{0}\) correspond à la densité d’énergie du régime dissipatif.
La régularisation introduit un paramètre supplémentaire dans le modèle. La valeur initiale du seuil notée \({\kappa}_{0}\) est définie de la manière suivante :
où PENA_ADHERENCE est le paramètre de Code_Aster entré par l’utilisateur.
- Remarque
La régularisation de l’énergie en zéro permet de définir une contrainte dans l’élément de joint à l’amorçage. Physiquement cela revient à dire que dès que la contrainte va augmenter, un petit saut va apparaître. Le comportement adoucissant ne s’effectuera que lorsque la norme du saut dans l’élément dépassera \(\kappa_{0}\), avant le joint se comporte comme un ressort.
Densité d’énergie de surface de pénalisation#
L’indicatrice rend compte de la condition de non-interpénétration des lèvres de la fissure. Elle est approchée numériquement par une fonction de pénalisation \(\psi_{pen}\) continue qui tend «rapidement» vers l’infini quand le saut normal devient négatif. Ainsi, la minimisation de l’énergie exclut les cas de figure où les bords du joint tendent à s’interpénétrer de façon importante. On choisit :
avec \(\langle \delta_n\rangle_{-}=\delta - \langle \delta_n\rangle_{+}=\min\{\delta_n, 0\}\), \(C\) constante définie à la section 2.2.3 et \(C_{0}\) constante arbitraire qui n’intervient pas dans l’écriture de la loi cohésive (voir partie suivante).
Vecteur contrainte#
Le vecteur contrainte dans l’élément noté \(\vec{\boldsymbol{\sigma}}\) est égal à la somme des dérivées de la densité d’énergie de surface et de la densité d’énergie de pénalisation par rapport au saut.
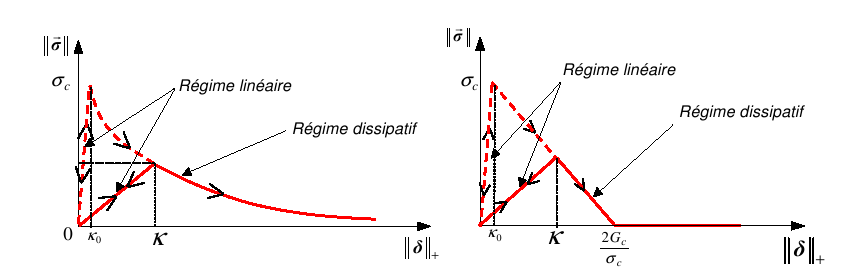
Fig. 320 Norme du vecteur contrainte en fonction de la norme du saut, loi CZM_EXP_REG à gauche, loi CZM_LIN_REG à droite#
On représente la norme du vecteur contrainte en fonction de la norme du saut sur la Fig. 320. Les flèches représentent le sens d’évolution possible de la contrainte suivant que le processus d’ouverture est réversible (régime linéaire) ou non (régime dissipatif). À l’amorçage, l’élément se comporte de façon linéaire avec une pente importante (régularisation), puis à un comportement adoucissant. La pente en zéro est gouvernée par la valeur initiale du seuil \(\kappa_{0}\) .
Vecteur contrainte en régime linéaire#
Le vecteur contrainte en régime linéaire s’écrit (voir Fig. 320) :
et le module tangent :
avec \(P(\kappa)\) défini par (5001) ou (5002) suivant la loi cohésive.
Vecteur contrainte en régime dissipatif#
Le vecteur contrainte en régime dissipatif s’écrit (voir Fig. 320) :
CZM_EXP_REG :
CZM_LIN_REG :
et le module tangent :
CZM_EXP_REG :
CZM_LIN_REG:
Vecteur contrainte de pénalisation#
Le vecteur contrainte de pénalisation s’écrit :
et le module tangent :
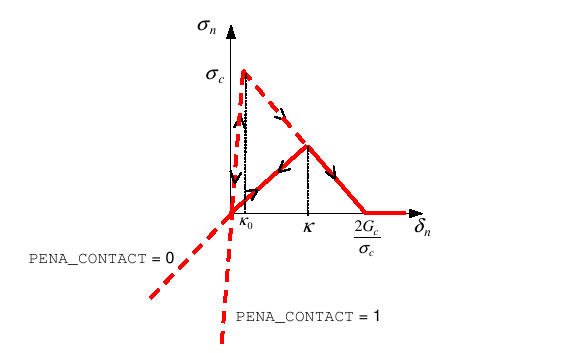
Fig. 321 Contrainte cohésive normale en fonction du saut normal (cas d’une ouverture en mode I pur)#
La valeur de la pente de pénalisation \(C\) est donnée par la relation :
avec \(P(\kappa)\) défini par (5001) ou (5002) suivant la loi cohésive. Le paramètre numérique PENA_CONTACT, entré par l’utilisateur, permet de jouer sur la pente de la pénalisation du contact (voir Fig. 321). Ce dernier vaut par défaut 1, cela correspond au cas où la pente du contact est identique à celle de l’adhérence initiale. Si on choisit une valeur supérieure à 1, on augmente la pénalisation. Si on choisit 0, la pénalisation est identique à la pente de la décharge élastique courante.
Variables internes#
Les lois CZM_EXP_REG et CZM_LIN_REG possèdent chacune neuf variables internes. Du point de vue de la loi de comportement, seule la première est stricto sensu une variable interne. Les autres fournissent des indications sur l’état du joint à un instant donné.
Variables internes identiques pour les deux lois :
\(V1=\kappa\) : seuil en saut (plus grande norme atteinte)
\(V2\) : indicateur de dissipation \(=0\) si régime linéaire, \(=1\) si régime dissipatif
\(V5=V4\times G_{c}\) : valeur de l’énergie dissipée (voir Fig. 322)
\(V7=\delta_{n}\) : saut normal
\(V8=\delta_{t}\) : saut tangentiel
\(V9=\delta_{\tau}\) : saut tangentiel (nul en 2D)
Variables internes pour CZM_EXP_REG :
\(V3\) : indicateur d’endommagement \(=0\) si matériau sain (\(\kappa=\kappa_{0}\)), \(=1\) si matériau endommagé (\(\kappa>\kappa_{0}\))
\(V6=\frac{1}{2}\|\boldsymbol{\delta}\|_{+}^{2}\frac{\sigma_{c}}{\kappa}\exp(\frac{-\sigma_{c}}{G_{c}}\kappa)\) : valeur de l’énergie résiduelle courante
Variables internes pour CZM_LIN_REG :
\(V3\) : indicateur d’endommagement \(=0\) si matériau sain (\(\kappa=\kappa_{0}\)), \(=1\) si matériau endommagé (\(\kappa_{0}<\kappa<2G_{c}/\sigma_{c}\)), \(=2\) si matériau rompu (\(\kappa \ge 2G_{c}/\sigma_{c}\))
\(V4 = \kappa\frac{\sigma_c}{2G_c}\) : pourcentage d’énergie dissipée
\(V6=\frac{1}{2}\|\boldsymbol{\delta}\|_{+}^{2}\sigma_{c}(\frac{1}{\kappa}-\frac{\sigma_{c}}{2G_{c}})\) : valeur de l’énergie résiduelle courante (voir Fig. 322)
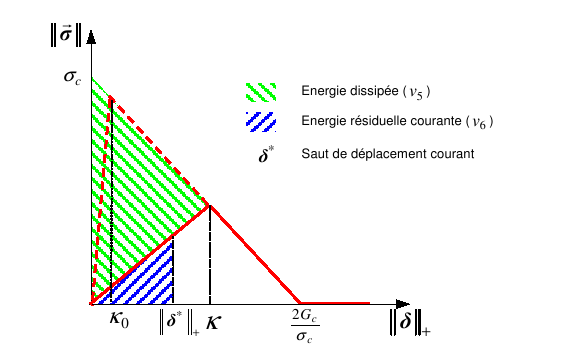
Fig. 322 Représentation des énergies pour la loi CZM_LIN_REG#
- Remarque
On a vu que pour les besoins de la régularisation de l’énergie, le seuil initial \(\kappa_{0}\) (seuil pour un élément sain) n’est pas nul. Cela implique donc que l’énergie dissipée (variable interne \(V5\)) n’est pas nulle pour un élément sain. Cela n’a pas de réalité physique, cette variable interne n’a de signification qu’une fois le seuil initial franchi : \(\kappa >\kappa_{0}\).
Définition des lois cohésives CZM_xxx_MIX#
Ces lois sont destinées :
à la modélisation d’une interface élastique ou à la vérification élémentaire de la mise en données d’un problème de fissuration avec la loi CZM_ELAS_MIX ;
à la rupture fragile ou quasi-fragile (chargement monotone) pour CZM_OUV_MIX, CZM_TAC_MIX, et CZM_EXP_MIX. La forme exponentielle de la loi CZM_EXP_MIX est bien adaptée pour représenter la rupture des bétons ;
à la rupture ductile pour CZM_TRA_MIX ;
à la fatigue (chargement cyclique) pour CZM_FAT_MIX ;
à la dégradation d’une interface acier-béton pour CZM_LAB_MIX.
Dans cette partie on présente l’énergie de surface \(\Psi\) ainsi que le vecteur contrainte \(\vec{\boldsymbol{\sigma}}\) pour chacune d’entre elles, puis les paramètres numériques et les variables internes. L’irréversibilité de la fissuration est formulée de la même manière pour les quatre premières lois et CZM_LAB_MIX (de type Talon-Curnier avec décharge verticale (6)). Pour CZM_FAT_MIX, elle est basée sur le cumul d’ouverture au cours des cycles.
La formulation mixte lagrangien augmenté permet de s’affranchir de la régularisation de l’énergie de surface. Ceci permet de modéliser l’adhérence parfaite de l’interface dans un état sain. Pour plus d’informations sur le modèle d’interface (* _INTERFACE et * _INTERFACE_S), le lecteur peut se reporter à la documentation [R3.06.13].
Loi cohésive élastique CZM_ELAS_MIX#
Le lecteur pourra trouver les détails de la formulation et de l’implantation numérique de ce modèle dans le document (10). On ne fournit ici que les résultats principaux, en reprenant les notations introduites dans [R3.06.13]. Les caractéristiques mécaniques du modèle sont renseignées dans la commande DEFI_MATERIAU [U4.43.01] sous le mot-clé CZM_ELAS.
Énergie de surface#
L’énergie de surface \(\Psi\), définie sur une discontinuité \(\Gamma\), dépend de manière quadratique du saut de déplacement \(\boldsymbol{\delta}\) entre les lèvres de la fissure :
avec la densité d’énergie de surface :
La fonction \(\psi\) désigne la densité d’énergie élastique :
où \({k}_{nt}\), \({k}_{nc}\) et \({k}_{t}\) désignent respectivement les modules de rigidité normale en traction, rigidité normale en compression, et rigidité tangentielle. Dans la commande DEFI_MATERIAU/CZM_ELAS, ils sont renseignés sous les mots-clés RIGI_NOR_TRAC, RIGI_NOR_COMP et RIGI_TAN respectivement. Lorsque \({k}_{nt}={k}_{nc}\), la rigidité est identique en traction et en compression et elle peut être renseignée par un unique mot-clé RIGI_NOR.
La fonction \({A}_{t}\) permet de considérer un comportement tangentiel parfaitement adhérent ou bien élastique :
Le choix entre adhérence parfaite et élasticité pour la direction tangente est fixé par le mot-clé ADHE_TAN de DEFI_MATERIAU (“PARFAITE” ou “ELAS”).
Enfin, la fonction \({A}_{n}\) permet de considérer un comportement normal parfaitement adhérent, avec condition de contact unilatéral (et élasticité en ouverture) ou bien élastique en ouverture et en fermeture :
Le choix entre adhérence parfaite, contact unilatéral et élasticité pour la direction normale est fixé par le mot-clé ADHE_NOR de DEFI_MATERIAU (“PARFAITE”, “UNILATER” ou “ELAS”).
Vecteur contrainte#
Le vecteur contrainte \(\vec{\boldsymbol{\sigma}}\) dérive de l’énergie de surface \(\Pi\). Mais en présence de conditions d’adhérence ou de contact, cette dernière n’est pas dérivable en tout point. On généralise alors la notion de dérivée par celle de sous-différentiel. Sans entrer dans les détails, il s’en suit les relations suivantes entre le vecteur contrainte et le saut de déplacement :
Pour le comportement normal :
Et pour le comportement tangentiel :
Lagrangien augmenté et intégration de la relation de comportement#
Conformément à [R3.06.13], le Lagrangien du problème d’interface relaxé est augmenté d’un terme de pénalisation où \(r\) désigne le coefficient d’augmentation. La valeur de \(r\) est fixée par l’utilisateur sous le mot-clé PENA_LAGR_ABSO, avec comme unité une contrainte par unité de surface (\(J/{m}^{4}\)).
L’intégration de la relation de comportement mixte consiste à résoudre le système algébrique suivant :
où \(\boldsymbol{\lambda}\) désigne le multiplicateur de Lagrange (la force cohésive nodale augmentée), \(⟦\boldsymbol{u}⟧\) est le saut de déplacement calculé à partir des déplacements nodaux et \(\boldsymbol{\delta}\) est le saut de déplacement local (aux points d’intégration), résultat du processus d’intégration de la loi de comportement. À ce stade, \(\boldsymbol{\lambda}\) et \(⟦\boldsymbol{u}⟧\) sont des quantités connues et \(\boldsymbol{\delta}\) est l’inconnue du système.
En notant \(\varphi \equiv \boldsymbol{\lambda} +r⟦\boldsymbol{u}⟧\), la solution du système algébrique est la suivante :
Pour le comportement normal :
Et pour le comportement tangentiel :
Variables internes#
Le comportement d’interface étant élastique, il n’y a pas de variables internes stricto sensu. En revanche, on fournit le saut de déplacement local \(\boldsymbol{\delta}\) à des fins de post-traitement. Ses composantes \((\delta_n, \delta_t, \delta_\tau)\) sont rangées dans le tableau des variables internes (V1,V2,V3).
Lois cohésives pour la rupture fragile CZM_OUV_MIX , CZM_TAC_MIX et CZM_EXP_MIX#
Énergie de surface#
L’énergie de surface \(\Psi\) , définie sur une discontinuité \(\Gamma\), dépend du saut de déplacement entre les lèvres de la fissure \(\boldsymbol{\delta}\) et de \(\kappa\) variable interne seuil qui gère l’irréversibilité de la fissuration. Cette dernière mémorise la plus grande norme du saut atteinte au cours de l’ouverture. Sa loi d’évolution entre deux incréments de chargement successifs - et + s’écrit :
L’énergie de surface est définie de la manière suivante :
avec la densité d’énergie de surface :
où \({I}_{\mathbb{R}^+}\) fonction indicatrice traduit la condition de non interpénétration des lèvres de la fissure, et \(\psi\) est la densité d’énergie cohésive définie de la manière suivante :
CZM_TAC_MIX :
CZM_OUV_MIX :
CZM_EXP_MIX :
- Remarques
\(C\) dépend d’un paramètre numérique choisi par l’utilisateur (voir partie 3.5).
Pour les lois CZM_OUV_MIX et CZM_EXP_MIX, la dissipation n’est pilotée que par l’ouverture normale, l’évolution du seuil est donc stricto sensu définie de la manière suivante : \({\kappa}^{+}=\max({\kappa}^{-},\delta_n)\).
La longueur de la zone cohésive étant plus longue pour la loi CZM_EXP_MIX que pour les autres lois CZM d’interface, une augmentation du nombre de maille ou du coefficient de pénalisation est nécessaire pour obtenir une solution.
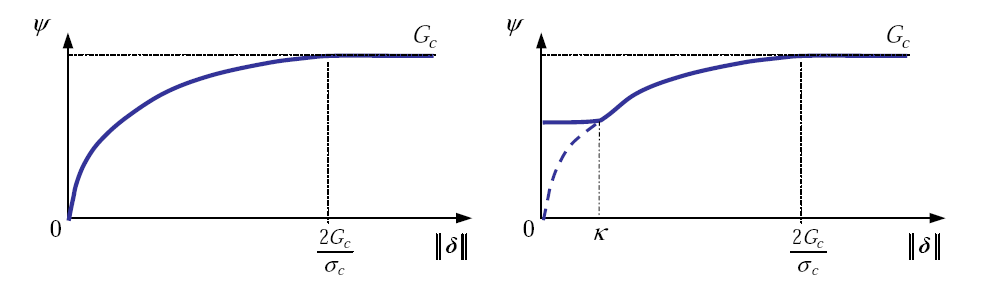
Fig. 323 Densité d’énergie de surface en fonction de la norme du saut de déplacement, loi CZM_TAC_MIX#
Les lois CZM_OUV_MIX et CZM_EXP_MIX ont un comportement adoucissant en ouverture et «élastique» en mode de glissement tandis que CZM_TAC_MIX (Fig. 323) couple l’adoucissement dans les trois modes de rupture. Les deux premières ne modélisent la dissipation d’énergie qu’en mode I. Elles sont destinées au cas particulier d’une modélisation en mode d’ouverture pur pour laquelle on souhaite imposer une condition de symétrie sur les lèvres des éléments finis cohésifs qui la porte (éléments d’interface). La troisième est valable dans les autres cas de figure.
Vecteur contrainte#
L’énergie de surface définie précédemment n’est pas dérivable dans les cas suivants : \(\boldsymbol{\delta}=0\) (adhésion parfaite avant amorçage), \(\delta_n=0\) (contact) et \(\| \boldsymbol{\delta} \| =\kappa\) (décharge verticale de type Talon-Curnier). Le vecteur contrainte noté \(\vec{\boldsymbol{\sigma}}\) est alors défini comme appartenant au sous différentiel (généralisation de la notion de dérivée) de la densité d’énergie de surface.
Cet ensemble coïncide avec la dérivée aux points où celle-ci est dérivable et à un ensemble de dérivées directionnelles possibles dans le cas contraire. Pour plus de détails on se reportera à la doc [R7.02.13] des éléments d’interface. Donnons ici les valeurs prises par cet ensemble dans les différents cas de figure pour la loi CZM_TAC_MIX :
Adhésion parfaite avant amorçage (\(\kappa=0\) et \(\boldsymbol{\delta}=0\)) :
Charge / Décharge retour à zéro (\(\|\boldsymbol{\delta}\|<\kappa\)) et condition de contact :
Charge / Décharge verticale (\(\|\boldsymbol{\delta}\|=\kappa >0\)) et condition de contact :
Endommagement, rupture (\(\|\boldsymbol{\delta}\|>\kappa\)) et condition de contact :
Pour la loi CZM_OUV_MIX et la loi CZM_EXP_MIX, les modes sont découplés, on peut expliciter les sous différentiels (ensembles de scalaires) sous la forme suivante :
Mode I :
Adhésion avant amorçage (\(\kappa =0\) et \(\delta_n=0\)) :
\[\partial \Pi(\delta_n)=\lbrace {x}_{n}\in \mathbb{R};{x}_{n}\le {\sigma}_{c}\rbrace\]Charge / Décharge retour à zéro (\(\delta_n<\kappa\)) et condition de contact :
\[\partial \Pi(\delta_n)=\lbrace {x}_{n};{x}_{n}\le 0 \text{ et }\delta_n\ge 0 \text{ et }{x}_{n}\delta_n=0\rbrace\]Charge / Décharge verticale (\(\delta_n=\kappa >0\)) :
\[\partial \Pi(\delta_n)=\lbrace \lambda \delta_n;0\le \lambda \le \frac{\psi'(\kappa )}{\kappa}\rbrace\]Endommagement et rupture (\(\delta_n>\kappa\) ) :
\[\partial \Pi(\delta_n)=\lbrace \psi'(\delta_n)\rbrace\]Mode II ou III :
Comportement élastique :
\[\partial \Pi(\delta_{T})=\lbrace \psi'(\delta_{T})\rbrace,\, T=t\text{ ou }\tau\]
On détaille ici les deux lois en adoptant une écriture plus usuelle.
Loi CZM_OUV_MIX :
\(\vec\sigma_T=C\delta_T\) où \(T=t\text{ ou }\tau\) (comportement élastique) (voir 3.5 pour la définition de \(C\)). Une représentation graphique est donnée Fig. 324.
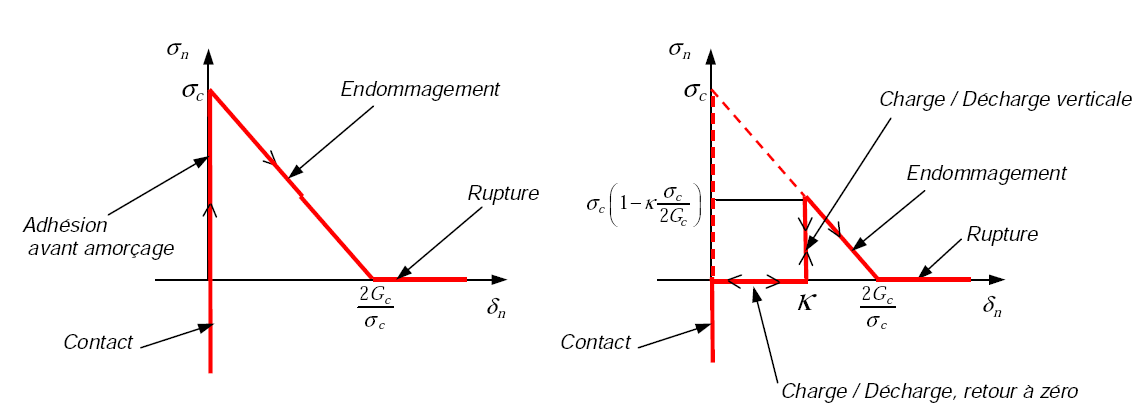
Fig. 324 Composante normale du vecteur contrainte en fonction du saut normal pour la loi CZM_OUV_MIX (seuil \(\kappa\) nul à gauche et positif à droite)#
Loi CZM_EXP_MIX :
\(\vec\sigma_T=C\delta_T\) où \(T=t\text{ ou }\tau\) (comportement élastique) (voir 3.5 pour la définition de \(C\)). Une représentation graphique est donnée Fig. 325.
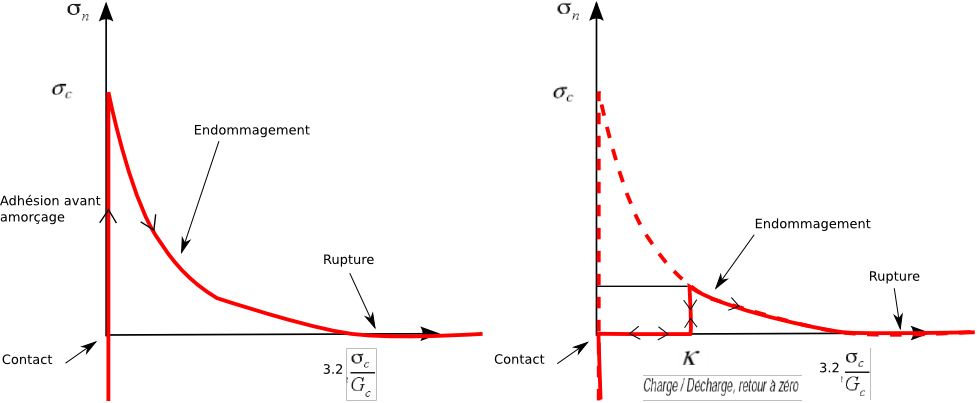
Fig. 325 Composante normale du vecteur contrainte en fonction du saut normal pour la loi CZM_EXP_MIX (seuil \(\kappa\) nul à gauche et positif à droite)#
Dans les cas de figure où l’énergie est dérivable, le module tangent est facile à déterminer. Donnons la valeur de ce dernier pour les phases d’endommagement et de rupture :
CZM_TAC_MIX :
CZM_OUV_MIX :
CZM_EXP_MIX :
Loi cohésive pour la rupture ductile CZM_TRA_MIX#
Énergie de surface#
L’énergie de surface \(\Psi\), définie sur une discontinuité \(\Gamma\), dépend du saut de déplacement entre les lèvres de la fissure : \(\boldsymbol{\delta}\) et de \(\kappa\) variable interne seuil qui gère l’irréversibilité de la fissuration. Cette dernière mémorise la plus grande valeur du saut normal atteinte au cours du chargement. Nous donnerons plus en détail son évolution dans la partie suivante. L’énergie de surface est définie de la manière suivante :
avec la densité d’énergie de surface :
où :
avec \(\delta_{res}\) saut résiduel de contact défini dans la partie 3.3.2 .
Dans le cas où la fissuration n’a pas évolué [3] (matériau sain), le saut résiduel de contact est nul et \(\psi\), la densité d’énergie cohésive, est définie de la manière suivante :
Le saut critique \(\delta_c\) est déduit des autres paramètres de la façon suivante : \(\delta_c={2G_c/{\sigma}_{c}+\delta_e-\delta_p\) , les paramètres \(\delta_e\) et \(\delta_p\) permettent de déterminer la forme de l’énergie (voir Fig. 326) et donc la forme en trapèze de la loi cohésive (Fig. 327).
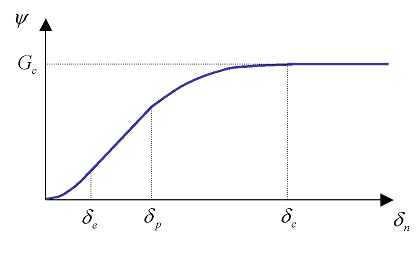
Fig. 326 Densité d’énergie de surface en fonction du saut de déplacement normal, loi CZM_TRA_MIX#
En pratique dans Code_Aster, l’utilisateur renseigne des paramètres adimensionnels qui correspondent à un pourcentage du saut critique. Ils sont positifs et strictement inférieurs à 1, baptisés COEF_EXTR comme extrinsèque [4] pour déterminer la pente à l’origine (au choix : infinie ou pas) et COEF_PLAS comme plastique pour déterminer la fin du plateau plastique de la loi :
Le saut critique est donc déduit des quatre paramètres matériau fournis par l’utilisateur de la façon suivante :
On remarque que pour assurer la forme en trapèze il est nécessaire d’avoir la condition : COEF_EXTR inférieur à COEF_PLAS. On autorise toutefois que ces deux coefficients soient égaux ce qui conduit à une forme en triangle. De plus ils doivent être strictement inférieurs à 1 afin de garantir l’unicité de la solution locale.
Si on choisit un COEF_EXTR nul, la première ligne de l’équation (4851) n’est plus pertinente et si on choisit également COEF_PLAS nul, la seconde ligne n’est plus utile. Ce cas de figure permet de retomber sur l’énergie de la loi fragile CZM_OUV_MIX (voir partie 3.2.1). L’irréversibilité pour le contact est toutefois différente. En effet, dans la loi ductile on conserve un saut résiduel \(\delta_{res}\) au moment de la mise en contact des lèvres (voir partie suivante).
Vecteur contrainte#
L’énergie de surface définie précédemment n’est pas dérivable dans les cas suivants : \(\delta_n=0\) (adhésion parfaite avant amorçage si \(\delta_e=0\) ou cas du contact), et \(\delta_n=\kappa\) (décharge verticale si \(\delta_e=0\)). Le vecteur contrainte noté \(\vec{\boldsymbol{\sigma}}\) est alors défini comme appartenant au sous différentiel (généralisation de la notion de dérivée) de la densité d’énergie de surface.
Cet ensemble coïncide avec la dérivée aux points où celle-ci est dérivable et à un ensemble de dérivées directionnelles possibles dans le cas contraire. Pour plus de détails on se reportera à la doc [R7.02.13] des éléments d’interface.
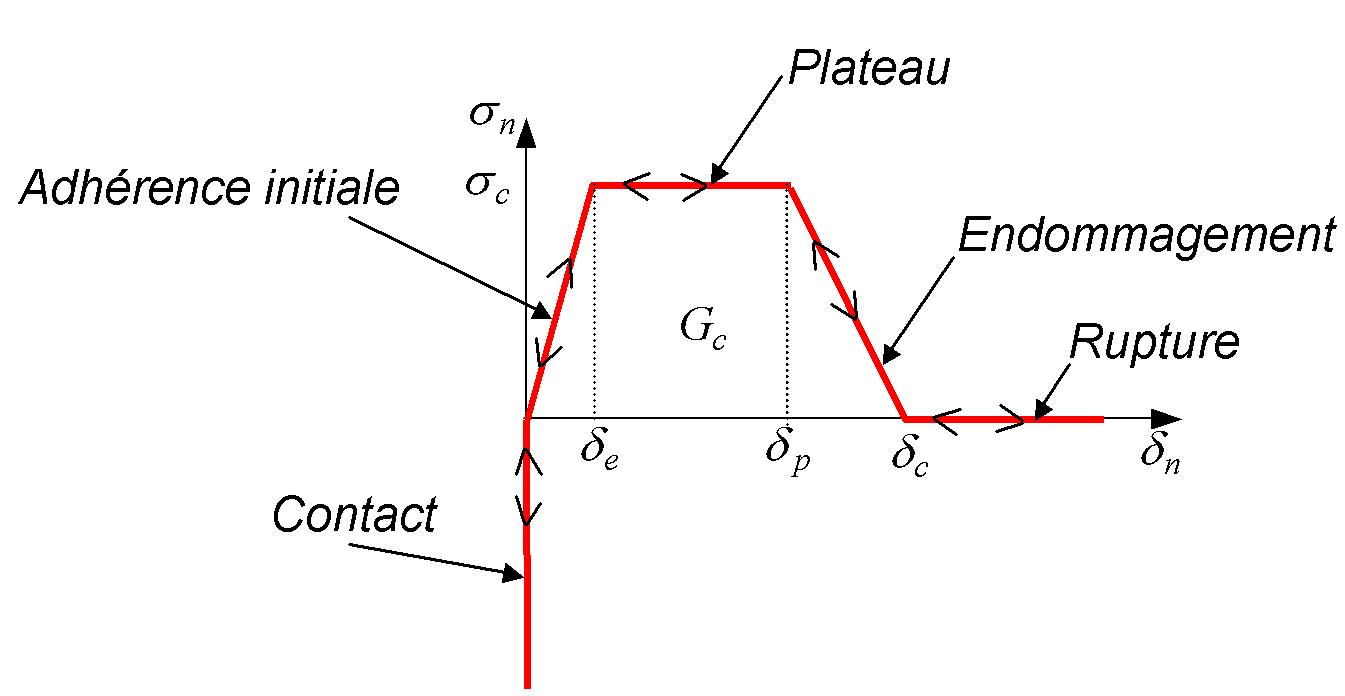
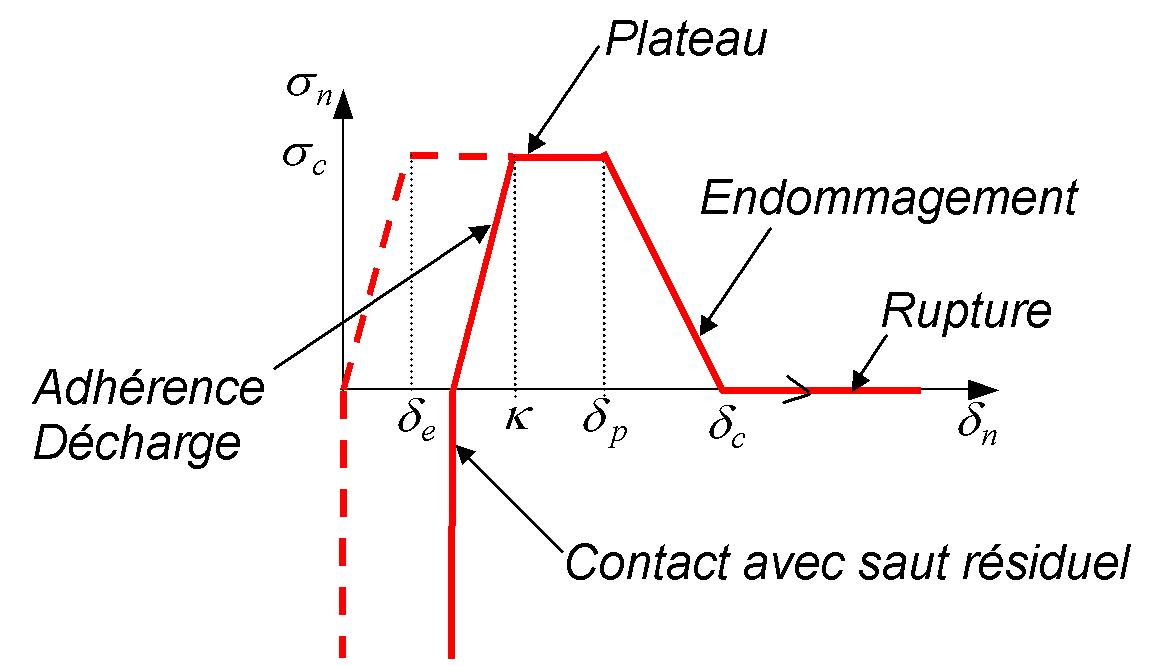
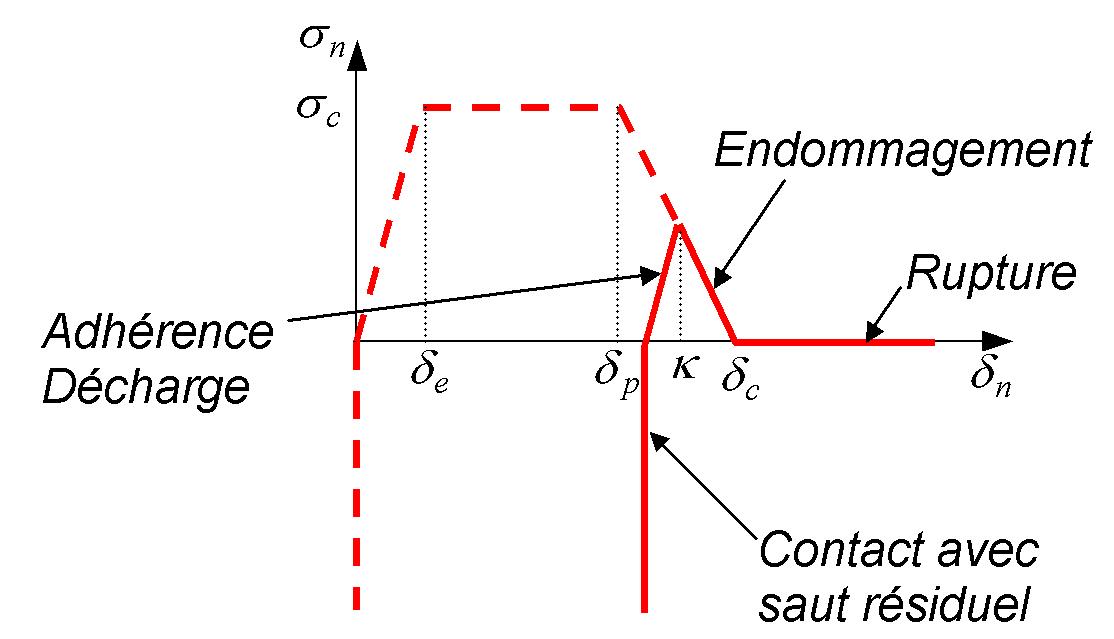
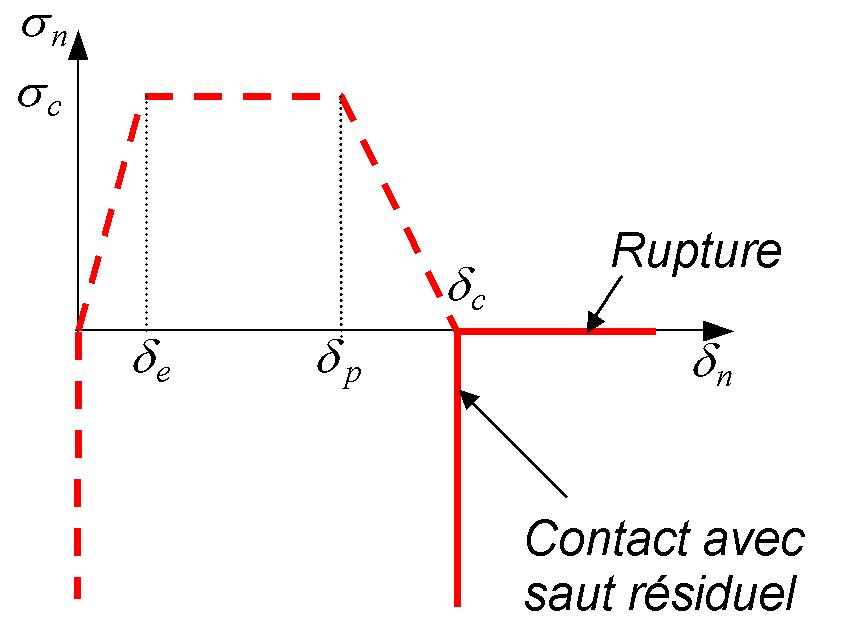
Fig. 327 Vecteur contrainte à différents états de fissuration : sain (1), endommagé (2 et 3) et cassé (4)#
Sur la Fig. 327 on représente les différents stades d’évolution de la loi dans le cas où \(\delta_e\neq 0\). Dans le cas contraire, les pentes d’adhérence initiale et d’adhérence/décharge sont infinies.
Définition de l’évolution du seuil
Comme nous l’avons vu dans la partie précédente, l’irréversibilité est pilotée par un seuil noté \(\kappa\). Sa valeur initiale est fixée à \(\delta_e\), en effet on considère qu’il n’y a pas de dissipation d’énergie dans la phase d’adhésion.
Dans le cas où \(\delta_e=0\) l’évolution du seuil \(\kappa\), d’un incrément de chargement à l’autre, est donné classiquement par : \({\kappa}^{+}=\max({\kappa}^{-},\delta_n)\).
Dans le cas où \(\delta_e\neq 0\) l’évolution du seuil \(\kappa\), d’un incrément de chargement à l’autre, est donné par \({\kappa}^{+}=\max(\max({\kappa}^{-},\delta_e),\delta_n)\).
De plus, on borne à \(\delta_c\) la valeur de \(\kappa\).
Ces trois points peuvent être résumés dans l’écriture condensée suivante :
La variable seuil nous permet de définir les trois états de la fissure cohésive (illustrés Fig. 327) :
Sain : \(\kappa =\delta_e\)
Endommagé : \(\delta_e<\kappa <\delta_c\)
Cassé : \(\kappa =\delta_c\)
Définition du saut résiduel de contact
En cas de décharge on fait le choix de maintenir un saut résiduel irréversible noté \(\delta_{res}\) pour la prise en compte du contact (voir Fig. 327). Cela est motivé d’un point de vue mécanique. En effet, on considère que les faciés de la rupture ductile sont assez chahutés et que les lèvres de fissure ne se recollent pas parfaitement lors d’une refermeture. Le saut résiduel est définit de la manière suivante (voir Fig. 328) :
avec \({\sigma}_{\kappa}\) valeur courante de la contrainte critique de la loi, cette quantité est donnée par :
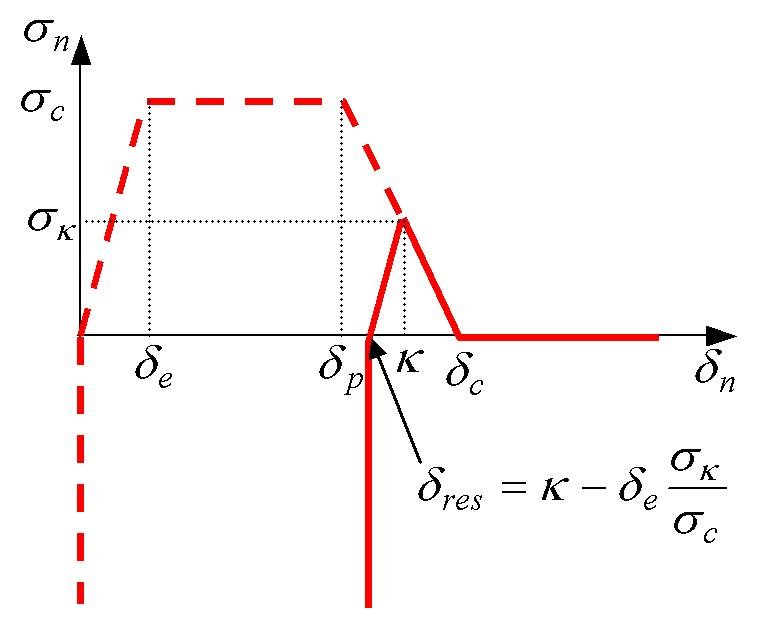
Fig. 328 Loi cohésive pour un état endommagé#
- Remarques
Définition de la loi cohésive :
En s’appuyant sur les quantités introduites précédemment, on peut adopter une écriture de la contrainte normale fonction de l’ouverture normale de façon générale, valable pour les trois états de fissuration :
\(\vec\sigma_T=C\delta_T\) où \(T=t\text{ ou }\tau\) (comportement élastique) (voir 3.5 pour la définition de \(C\)). Dans les cas de figure où l’énergie est dérivable le module tangent est facile à déterminer. Donnons la valeur de ce dernier pour les phases d’adhésion, de dissipation et de rupture :
Loi cohésive pour la fatigue CZM_FAT_MIX#
Cette loi est destinée à modéliser la propagation de fissure par fatigue en mode I. Elle est proche de celles présentées précédemment, la principale différence porte sur l’irréversibilité de la fissuration. Cette dernière est basée sur le cumul d’ouverture au cours des cycles de chargement. Cet ingrédient est essentiel pour rendre compte de la fatigue avec les modèles cohésifs. Pour des informations théoriques sur ce point, le lecteur peut se reporter à Jaubert et Marigo (4).
Énergie de surface#
L’énergie de surface \(\Psi\), définie sur une discontinuité \(\Gamma\), dépend du saut de déplacement normal entre les lèvres de la fissure : \(\delta_n\) et de \(\kappa\) variable interne seuil qui gère l’irréversibilité de la fissuration. Cette dernière mémorise le cumul d’ouverture au cours des cycles de chargement. Sa loi d’évolution entre deux incréments de chargement successifs i et i+1 s’écrit :
où le point la différence des valeurs en i et i+1. Ainsi \(\kappa\) n’évolue que lorsque le saut normal augmente et reste constant dans le cas contraire.
L’énergie de surface est définie de la manière suivante :
avec la densité d’énergie de surface:
où \(\psi\) désigne la densité d’énergie cohésive définie de la manière suivante :
- Remarque
On introduit une rigidité \(C\) en mode de glissement pour des questions numériques. Ce mode de rupture ne dissipe pas d’énergie et n’est pas destiné à être activé.
\(C\) dépend d’un paramètre numérique choisi par l’utilisateur (voir partie 3.5).
Vecteur contrainte#
L’énergie de surface définie précédemment n’est pas dérivable par rapport au saut dans les cas suivants : \(\delta_n=0\) (amorçage) et \(\dot{\delta}_n=0\) (le saut n’évolue pas). Le vecteur contrainte noté \(\vec{\boldsymbol{\sigma}}\) est défini comme appartenant au sous différentiel (généralisation de la notion de dérivée) de la densité d’énergie de surface.
Cet ensemble coïncide avec la dérivée aux points où celle-ci est dérivable :
avec :
où \(\delta_c=2{G}_{c}/{\sigma}_{c}\), et à un ensemble de dérivées directionnelles possibles dans le cas contraire. Pour plus de détails on se reportera à la doc [R7.02.13] des éléments d’interface. Pour la loi CZM_FAT_MIX, les modes sont découplés, on explicite les sous différentiels (ensembles de scalaires) pour chacun d’entre eux :
Mode I :
Adhésion avant amorçage (\(\kappa =0\) et \(\delta_n=0\)) :
\[\partial \Pi(\delta_n)=\lbrace {x}_{n}\in \mathbb{R};{x}_{n}\le {\sigma}_{c}\rbrace\]Charge / Décharge retour à zéro (\(\delta_n<\kappa\)) et condition de contact :
\[\partial \Pi(\delta_n)=\lbrace {x}_{n};{x}_{n}\le 0 \text{ et }\delta_n\ge 0 \text{ et }{x}_{n}\delta_n=0\rbrace\]Charge / Décharge verticale (\(\delta_n=\kappa >0\)) :
\[\partial \Pi(\delta_n)=\lbrace \lambda \delta_n;0\le \lambda \le \frac{\psi'(\kappa )}{\kappa}\rbrace\]Endommagement et rupture (\(\delta_n>\kappa\) ) :
\[\partial \Pi(\delta_n)=\lbrace \psi'(\delta_n)\rbrace\]Mode II ou III :
Comportement élastique :
\[\partial \Pi(\delta_{T})=\lbrace \psi'(\delta_{T})\rbrace,\, T=t\text{ ou }\tau\]
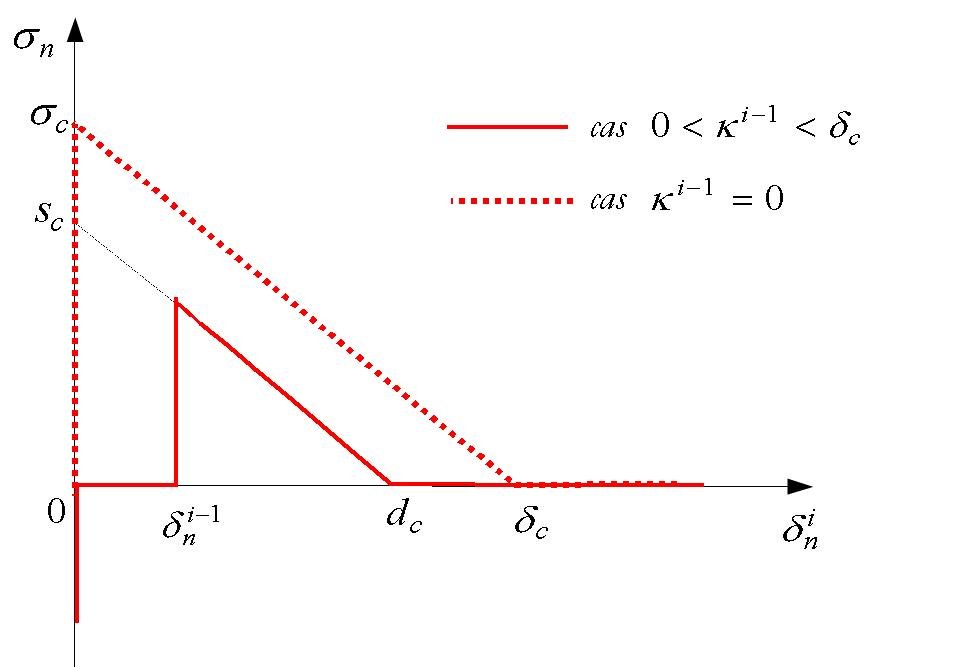
Fig. 329 Forme de la loi cohésive CZM_FAT_MIX#
On peut présenter la loi cohésive CZM_FAT_MIX en adoptant une écriture plus usuelle. On exprime la contrainte normale \({\vec\sigma}_{n}\) en fonction du saut courant \(\delta_n^{i}\) pour différentes valeurs du seuil à l’instant précédent \({\kappa}^{i-1}\) (voir Fig. 329) :
Cas \({\kappa}^{i-1}=0\) : configuration à l’amorçage (trait pointillé sur la Fig. 329) :
\[\begin{split}{\vec\sigma}_{n}(\delta_n^{i})= \left\{\begin{array}{ll} {\sigma}_{c}\left(1-\frac{\delta_n^{i}}{\delta_c}\right)& \text{si }0<\delta_n^{i}\le \delta_c\\ 0 & \text{si }\delta_n^{i}>\delta_c \end{array} \right.\end{split}\]
avec condition d’amorçage \(\vec\sigma_{n}(0)\le {\sigma}_{c}\).
Cas \(0<{\kappa}^{i-1}<\delta_c\) : configuration courante (trait continu sur la Fig. 329) :
\[\begin{split}{\sigma}_{n}(\delta_n^{i})= \left\{\begin{array}{ll} 0 & \text{si }0<\delta_n^{i}<\delta_n^{i-1}\\ {\sigma}_{c}\left(1-\frac{{\kappa}^{i-1}+\delta_n^{i}-\delta_n^{i-1}}{\dot{\delta}_n\delta_c}\right)& \text{si }\delta_n^{i-1}<\delta_n^{i}\le {d}_{c}\\ 0& \text{si }\delta_n^{i}>{d}_{c} \end{array}\right. ,\quad \left\{ \begin{array}{l} {d}_{c}&=\delta_c{s}_{c}/{\sigma}_{c}\\ {s}_{c}&={\sigma}_{c}\dot{\delta}_n\left(1-\frac{{\kappa}^{i-1}-\delta_n^{i-1}}{\dot{\delta}_n\delta_c}\right) \end{array} \right.\end{split}\]
avec condition de contact \({\sigma}_{n}(0)\le 0\) et condition de charge/décharge verticale \(0\le {\sigma}_{n}(\delta_n^{i})<{\sigma}_{c}\dot{\delta}_n(1-\frac{{\kappa}^{i-1}}{\delta_c})\).
Cas \({\kappa}^{i-1}\ge \delta_c\) : configuration rupture :
\[{\sigma}_{n}(\delta_n^{i})=0\text{ si }\delta_n^{i}>0\]
avec condition de contact \({\sigma}_{n}(0)\le 0\).
A titre illustratif, une évolution cyclique d’amplitude constante du saut de déplacement normal sur un point de gauss conduit à l’évolution de la contrainte représentée sur la Fig. 330. On y représente également le cas de figure où le chargement est monotone. L’évolution de la contrainte est alors identique à celle lors de la première montée du chargement cyclique. Ce qui nous amène à la remarque suivante.
- Remarque
La loi CZM_FAT_MIX est équivalente à la loi CZM_OUV_MIX tant que le chargement est monotone. Toutefois, on ne peut s’assurer de cette condition en chaque point de gauss, puisqu’il peut subvenir des décharges locales de la structure même si le chargement global croît. Il est donc déconseillé d’utiliser la loi de fatigue pour modéliser la fissuration sous chargement monotone. Le risque est de ne pas obtenir le même résultat qu’avec la loi CZM_OUV_MIX.
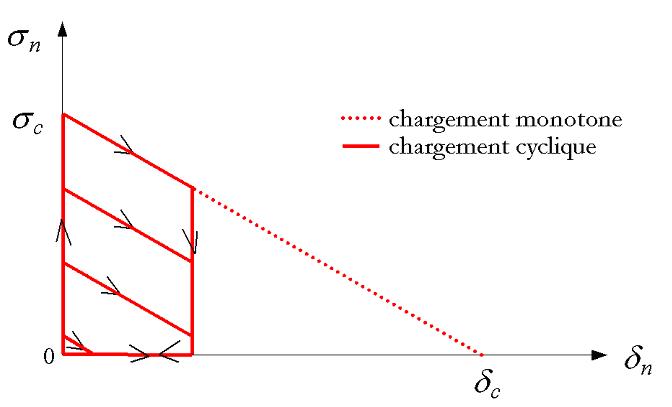
Fig. 330 Évolution de la contrainte au cours de chargements monotone et cyclique avec le loi CZM_FAT_MIX#
Paramètres numériques PENA_LAGR et RIGI_GLIS#
La formulation lagrangien augmenté du modèle introduit un paramètre numérique de pénalisation, noté PENA_LAGR dans Code_Aster. Cette valeur, entrée par l’utilisateur sous le mot clé RUPT_FRAG, est reliée au scalaire qui multiplie le terme quadratique du lagrangien (noté \(r\) dans la documentation [R3.06.13] par la relation suivante:
- Remarque
Il est nécessaire que PENA_LAGR soit strictement supérieur à 1 pour que le problème soit bien posé (unicité de la solution). Pour plus détails sur ce point, on se reportera à la doc [R3.06.13] ou à (6).
Pour les lois CZM_OUV_MIX, CZM_FAT_MIX et CZM_TRA_MIX un autre paramètre numérique est nécessaire (en plus du précédent), il détermine la rigidité du comportement en glissement (paramètre \(C\) introduit partie 3.2.1). On le note RIGI_GLIS, il est relié à \(C\) par :
On rappelle que ces deux lois ont pour vocation de prendre en compte la dissipation d’énergie par fissuration en mode d’ouverture uniquement. La rigidité du glissement n’intervient que pour traiter numériquement le cas où l’on souhaite imposer des conditions de symétrie sur les éléments d’interfaces. L’objectif est de garder une rigidité en glissement quand l’élément est cassé en ouverture.
Variables internes#
Les lois CZM_xxx_MIX possèdent chacune neuf variables internes. Du point de vue de la loi de comportement, seule la première est stricto sensu une variable interne. Les autres fournissent des indications sur l’état de l’élément d’interface à un instant donné.
\(V1=\kappa\) : seuil en saut, permet de prendre en compte l’irréversibilité de la fissuration, voir sa définition dans les partie précédentes (spécifique à chaque loi)
\(V2\) : indicateur du régime de la loi
Pour la loi CZM_TRA_MIX : \(V2=-1\) : contact, \(V2=0\) : adhérence initiale ou courante, \(V2=1\) : dissipation, \(V2=2\) : rupture finale, \(V2=3\) : plateau (voir Fig. 331). Pour les autres lois CZM_xxx_MIX : \(V2=-1\) : contact, \(V2=0\) : adhérence initiale ou courante, \(V2=1\) : dissipation, \(V2=2\) : rupture finale, \(V2=3\) : retour à zéro à contrainte nulle (voir Fig. 331).
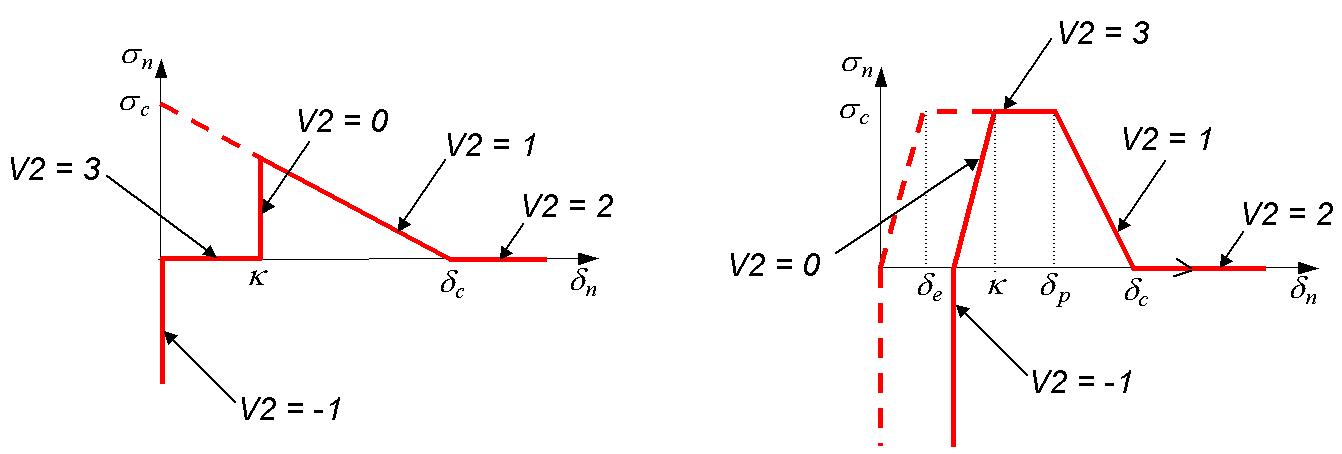
Fig. 331 Représentation des valeur de l’indicateur V2 pour les lois CZM_OUV_MIX à gauche et CZM_TRA_MIX à droite#
\(V3\) : indicateur d’endommagement : \(V3=0\) si matériau sain, \(V3=1\) si matériau endommagé, \(V3=2\) si matériau cassé (voir exemples Fig. 327.1, Fig. 327.2 et Fig. 327.4 pour CZM_TRA_MIX et Fig. 324 pour CZM_OUV_MIX)
\(V4\) : pourcentage d’énergie dissipée : \(V4=\frac{\kappa {\sigma}_{c}}{{G}_{c}}(1-\frac{\kappa {\sigma}_{c}}{4{G}_{c}})\)
pour CZM_OUV_MIX et CZM_TAC_MIX, \(V4=\frac{\delta_{res}({\sigma}_{c}+{\sigma}_{\kappa})+(\delta_p-\delta_e)({\sigma}_{c}-{\sigma}_{\kappa})}{2{G}_{c}}\) pour CZM_TRA_MIX
\(V5=V4\times {G}_{c}\) : valeur de l’énergie dissipée (voir Fig. 332)
\(V6\) : valeur de l’ énergie résiduelle courante : nulle pour ces lois (valable pour CZM_xxx_REG)
\(V7=\delta_n\) : saut normal
\(V8={\delta}_{t}\) : saut tangentiel
\(V9={\delta}_{\tau}\) : saut tangentiel (nul en 2D)
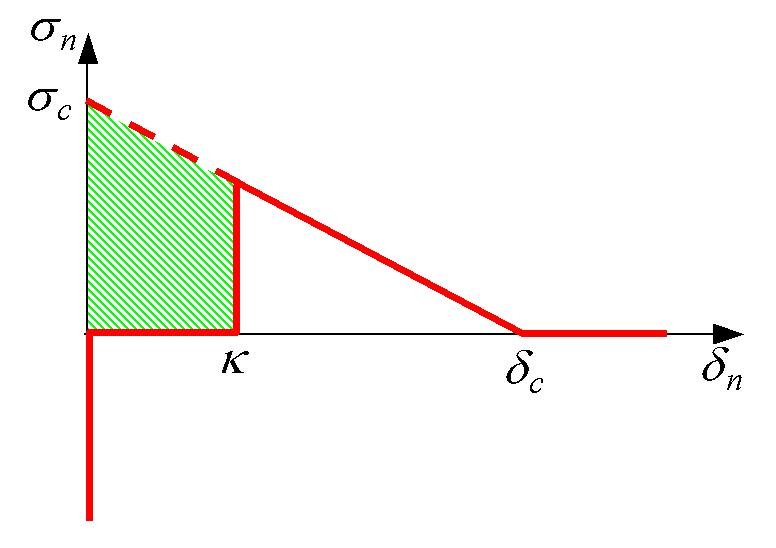
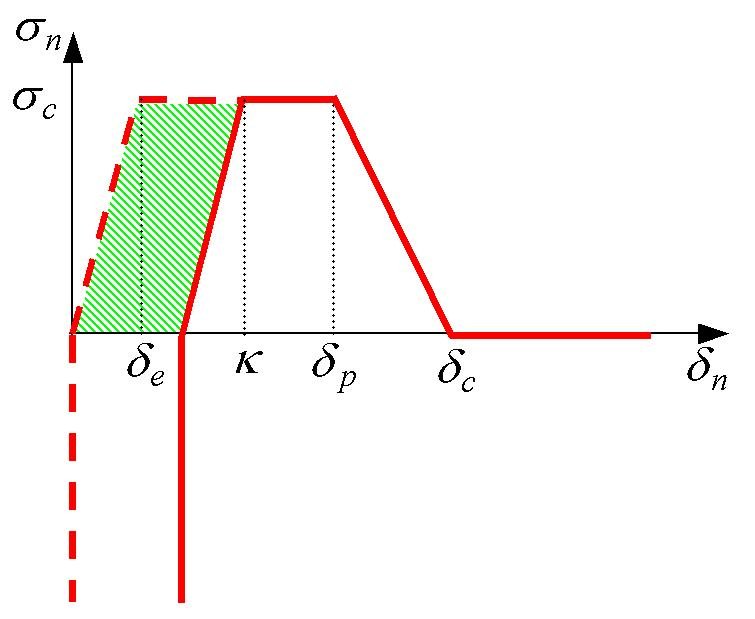
Fig. 332 Représentation de l’énergie dissipée V5 (partie hachurée) pour les lois CZM_OUV_MIX et CZM_TRA_MIX#
- Remarque
Pour la loi CZM_FAT_MIX l’énergie dissipée est égale à la somme des aires des trapèzes lors de l’évolution de la contrainte présentée sur la Fig. 330. Une fois le point matériel rompu on remarque que cette énergie est égale à l’aire du triangle décrit lors d’une évolution monotone.
Loi cohésive pour une liaison acier-béton CZM_LAB_MIX#
Énergie de surface#
Ce modèle a été conçu pour modéliser le comportement d’une liaison acier-béton dans une structure en béton armé. On pourra se reporter à (9) pour la construction et la validation de ce modèle.
L’énergie de surface \(\Psi\), définie sur une interface \(\Gamma\), dépend du saut de déplacement à travers l’interface \(\boldsymbol{\delta}\) et de la variable interne seuil \(\kappa\) qui gère l’irréversibilité du glissement. Cette dernière mémorise la plus grande norme du saut atteinte au cours du glissement. Sa loi d’évolution entre deux incréments de chargement successifs - et + s’écrit :
L’énergie de surface est définie de la manière suivante :
avec la densité d’énergie de surface :
où \(I_{K}\) est une fonction indicatrice qui impose la cinématique de glissement de l’interface. Les différentes cinématiques possibles (au choix de l’utilisateur) sont mentionnées dans le tableau ci-dessous:
Contact unilatéral |
\(I_{K}(\boldsymbol{\delta})=\left\{\begin{array}{l}+\infty &\text{si }\delta_n<0\\ 0 &\text{si }\delta_n\ge 0\end{array}\right.\) |
Glissement dans le plan tangent |
\(I_{K}(\boldsymbol{\delta})=\left\{\begin{array}{l}+\infty &\text{si }\delta_n\neq 0\\ 0 &\text{si }\delta_n=0\end{array}\right.\) |
Glissement unidirectionnel selon le vecteur \(t\) |
\(I_{K}(\boldsymbol{\delta})=\left\{\begin{array}{l}0 &\text{si }\boldsymbol{\delta} \| t\\ +\infty &\text{sinon}\end{array}\right.\) |
La densité d’énergie cohésive \(\psi\) est telle que :
Cette grandeur s’interprète comme la force cohésive à l’interface en fonction du saut de déplacement, et se trouve représentée sur la Fig. 333. Les paramètres \({\sigma}_{0}\) et \({\delta}_{0}\) permettent d’adimensionner la force et le déplacement, tandis que \(\alpha\) et \(\beta\) paramètrent la forme de la courbe. En pratique, on doit avoir \(0<\alpha <1\) et \(\beta >0\) .
On peut calculer le point où la force cohésive est maximale, qui est défini par:
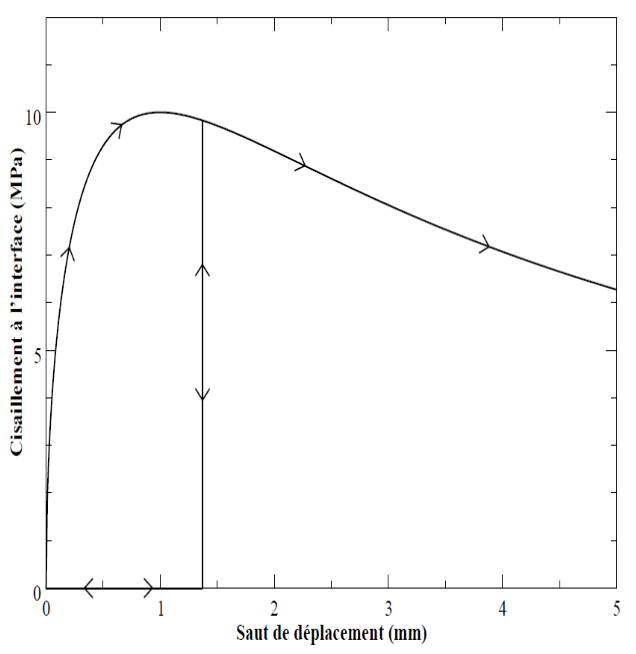
Fig. 333 Force cohésive en fonction de la norme du saut de déplacement, loi CZM_LAB_MIX#
Vecteur contrainte#
L’énergie de surface définie précédemment n’est pas dérivable lorsque \(\|\boldsymbol{\delta}\|=\kappa\) (décharge verticale de type Talon-Curnier) ainsi qu’aux points de discontinuité de l’indicatrice \(I_{K}\). Le vecteur contrainte noté \(\vec\sigma\) est alors défini comme appartenant au sous différentiel (généralisation de la notion de dérivée) de la densité d’énergie de surface.
Cet ensemble coïncide avec la dérivée aux points où celle-ci est dérivable et à un ensemble de dérivées directionnelles possibles dans le cas contraire. Pour plus de détails on se reportera à la doc [R7.02.13] des éléments d’interface. Précisons ici les valeurs prises par cet ensemble lorsque la loi impose un glissement unidirectionnel dans la direction du vecteur \(\boldsymbol{t}\) :
Endommagement (\(\|\boldsymbol{\boldsymbol{\delta}}\|=\kappa\) et \(\dot{\|\boldsymbol{\boldsymbol{\delta}}\|}>0\)) :
Décharge / Recharge verticale (\(\|\boldsymbol{\boldsymbol{\delta}}\|=\kappa\) et \(\dot{\|\boldsymbol{\boldsymbol{\delta}}\|}=0\)) :
Décharge / Recharge à contrainte nulle (\(\|\boldsymbol{\boldsymbol{\delta}}\|<\kappa\)) :
Pilotage du chargement par prédiction élastique#
Le pilotage du chargement, est disponible pour les lois de comportement cohésives (sauf pour CZM_FAT_MIX où le chargement est cyclique et fixé par l’utilisateur et CZM_TRA_MIX où a priori la fissuration se fait progressivement). De type prédiction élastique: PRED_ELAS (voir [R5.03.80]), il permet de suivre des solutions dissipatives pour lesquelles le chargement n’est plus nécessairement monotone.
Le but du jeu est de se donner une équation de contrôle du pilotage qui fasse évoluer la fissuration de façon progressive afin de suivre les parties instables de la réponse globale. Cela permet de faire converger plus facilement des calculs avec des propagations brutales de fissures.
Pour rappel, on considère que le chargement (forces extérieures et déplacements imposés) se décompose en deux termes, l’un connu et l’autre dont seule la direction est connue, son intensité que l’on note \(eta\) devient une inconnue du problème :
De plus, la loi cohésive doit fournir le développement limité du critère \({F}_{el}\) . Pour plus de détails sur cette technique, on peut aussi se reporter à 5.
Puisqu’on introduit une nouvelle inconnue, il faut «fermer» le système en introduisant une nouvelle équation, qu’on appelle équation de pilotage.
où \(\Delta U_i\) est l’incrément de déplacement sur le pas de temps courant recherché par la méthode de Newton et où la quantité \(\Delta\tau\) permet de contrôler la finesse de la résolution (des pas de pilotage). Cette équation peut se réécrire pour obtenir une équation sur l’inconnue de pilotage \(\eta\), l’incrément de déplacement pouvant lui-même se mettre sous la forme d’une partie «constante» (vis-à-vis du pilotage) et d’une partie pilotée : \(\Delta U_i = \Delta U_i^0 + \eta_i\Delta U_i^1\),ce qui permet d’écrire :
On renvoie le lecteur à la référence [5] ou la doc [R5.03.80] pour plus de détails.
L’enjeu du pilotage dans le cadre des lois cohésives est d’écrire une équation de pilotage pertinente au niveau de la loi pour contrôler progressivement la dissipation. Ce type de pilotage est appelé «prédiction élastique» (mot-clé PRED_ELAS). Dans la suite, on détaille l’équation de pilotage pour les deux cas des lois régularisées et des lois mixtes.
On s’affranchit dorénavant de l’indice lié au pas de temps. Sauf mention explicite du contraire, les quantités sont exprimées à leur valeur à la fin du pas de temps courant.
Lois régularisées#
On rappelle que dans le cas des lois régularisées, la loi cohésive relie le saut de déplacement à la contrainte cohésive et à la variable interne traduisant la dissipation, qui peut être la variable d’endommagement \(d\) ou encore la variable seuil notée \(\kappa\) (ou encore \(r\)), suivant la maniètre dont est formulée à la loi. On écrit schématiquement la loi :
Pour ces lois, on vient contrôler progressivement la dissipation en contrôlant la quantité appelée «sortie de seuil», qui s’écrit :
Au niveau de la loi cohésive, l’inconnue saut de déplacement se décompose à son tour en une partie «constante» et une partie pilotée : \(\boldsymbol{\delta}=\boldsymbol{\delta}^0 + \eta\boldsymbol{\delta}^1\).
On a donc \(\delta_n = \boldsymbol{\delta}\cdot\boldsymbol{n} = (\boldsymbol{\delta}^0\cdot\boldsymbol{n}) + \eta(\boldsymbol{\delta}^1\cdot\boldsymbol{n})\) (idem pour la composante tangentielle) et la quantité contrôlée peut donc s’écrire donc en fonction de l’inconnue de pilotage :
Ici, on va imposer que la quantité contrôlée, cette «sortie de seuil», corresponde à une certaine portion \(\Delta\tau\) du seuil précédent :
Le seuil pouvant devenir très grand au niveau des point de Gauss «cassés», on vient limiter la sortie de seuil à une certaine fraction d’une longueur critique associée à l’élément cohésif notée \(l_c\) (par exemple \(l_c = G_c/\sigma_c\)) pour ces éléments.
On écrira donc plutôt :
ce qui nous donne notre équation de pilotage au niveau du point de Gauss.
On précisera enfin qu’on pilote de sorte à ce que l’équation de pilotage soit satisfaite sur au moins un point de Gauss, ce qui revient à définir l’équation globale suivante:
Lois à formulation mixte#
Contrairement aux lois régularisées, l’intégration numérique des lois reposant sur des éléments d’interface à formulation mixte consiste, en chaque point de gauss, à calculer la discontinuité de déplacement \(boldsymbol{\delta}\) pour des valeurs données des forces cohésives \(\boldsymbol{t}\) (correspondant aux multiplicateurs de Lagrange de la formulation augmentée et donc parfois notées \(\boldsymbol{\lambda}\)) et des sauts à travers l’élément \(⟦\boldsymbol{u}⟧\) du déplacement global, qui sont dans les deux cas des quantités nodales. On note schématiquement la loi [5]_ :
car c’est bien de cette manière que l’on procède à l’intégration numérique. Dans cette formulation, la condition \(\boldsymbol{\delta}=⟦\boldsymbol{u}⟧\) n’est ainsi réalisée qu’au sens faible.
Or pour une loi de comportement définie de la sorte, on n’a pas forcément unicité de la solution : on peut trouver plusieurs valeurs de discontinuité de déplacement \(\boldsymbol{\delta}\) correspondant à une force cohésive et un saut de déplacement donnés (Fig. 334.a). On va donc plutôt travailler avec la pseudo-force \(\boldsymbol{s} = \boldsymbol{t} + r⟦\boldsymbol{u}⟧\) qui fait intervenir un paramètre de pénalisation \(r\), ce qui revient à faire une rotation d’angle \(r\) et de centre \((0, t_0)\) de la loi dans l’espace \((⟦\boldsymbol{u}⟧, \boldsymbol{t})\). On a alors bien unicité de la solution (voir Fig. 334.b).
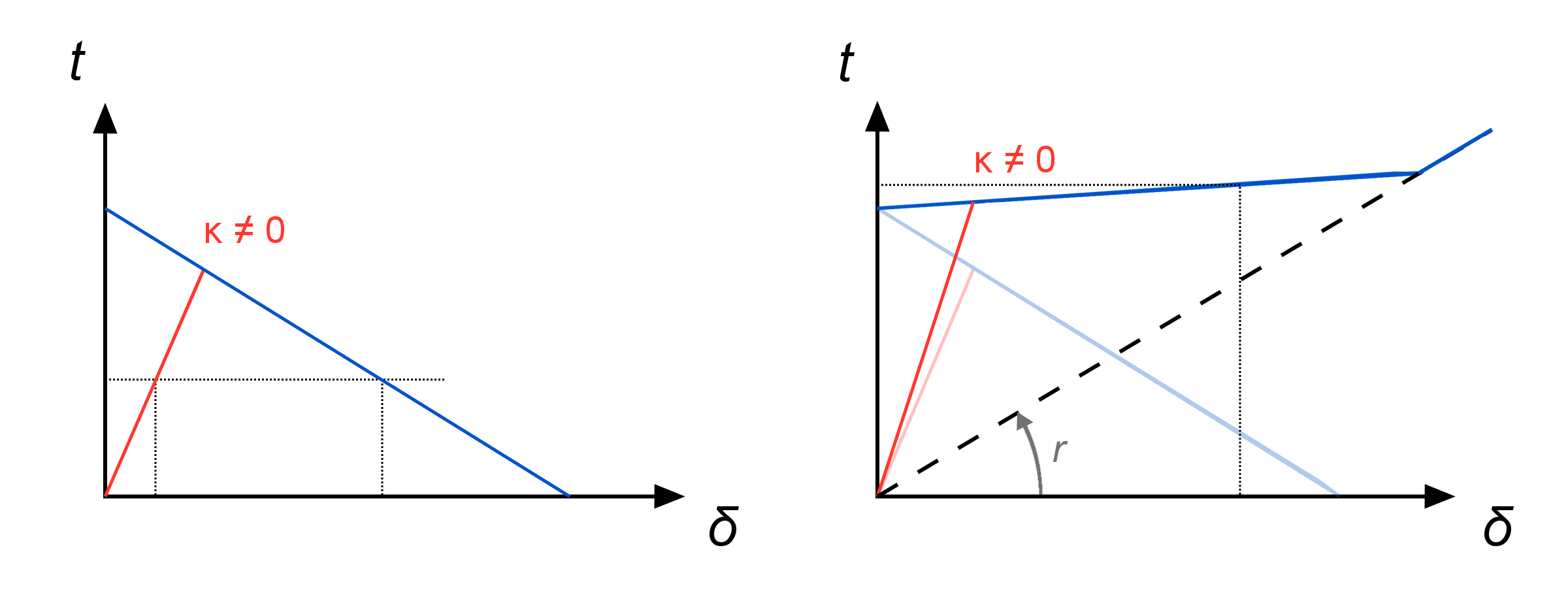
Fig. 334 Loi formulée sur des éléments d’interface mixtes : a. exprimée à partir de la force cohésive ; b. exprimée à partir de la pseudo-force.#
La loi de variable la pseudo-force s’écrit donc schématiquement de la manière suivante :
Pour plus de détails sur la formulation mixte, on renvoie le lecteur à la doc [R3.06.13].
Dans le cadre du pilotage, on va contrôler la dissipation lors du chargement en contrôlant la quantité «énergie dissipée», notée \(g\). L’équation de pilotage est donc :
Au niveau de la loi cohésive, les inconnues forces cohésives et sauts de déplacement globalse décomposent à leur tour en une partie «constante» et une partie pilotée :
ce qui se retrouve au niveau de la pseudo-force :
avec \(boldsymbol{s}_{cst}=t_{cst}+⟦\boldsymbol{u}⟧_{cst}\) et \(boldsymbol{s}_{pilo}=t_{pilo}+⟦\boldsymbol{u}⟧_{pilo}\).
L’enjeu est donc ici de relier la quantité contrôlée \(g=g(\boldsymbol{s}, \kappa)\) à la pseudo-force pilotée. Cette étape dépend évidemment de la loi de comportement considérée. A titre d’exemple, on l’explicite pour la loi exponentielle CZM_EXP_MIX.
L’énergie dissipée \(g\) est calculée en post-traitement dans la loi de comportement à partir de la variable interne \(\kappa\) enregistrant la plus grande discontinuité de déplacement atteinte au cours de l’histoire du chargement. Ici, on inverse la relation \(\kappa\longrightarrow g\) pour obtenir (on renvoie le lecteur à la formulation de la loi pour plus de détails) :
où \(l_c\) est une longueur critique caractéristique de l’élément cohésif, par exemple \(l_c = 3.2G_c/t_c\) (\(t_c\) et \(G_c\) sont les valeurs de contrainte cohésive critique initiale et de taux de restitution d’énergie critique qui sont les paramètres matériau de la loi).
On détermine ensuite la force cohésive critique \(t_g\) correspondante à cette valeur de \(\kappa_g\) :
et enfin la pseudo-force :
On peut donc réécrire l’équation de pilotage comme une équation en \(\eta\) :
avec \(g = g^- + \delta\tau\) la quantité contrôlée.
On peut noter que les solutions de l’équation de pilotage, une fois déterminées, peuvent être modifiées pour être rendues plus adimensionnelles et plus «\(\tau\) - indépendantes». Par exemple, dans le cas présent, on peut les multiplier par la quantité \(\Delta\tau / s_g\).
La signification de l’incrément de pilotage \(\Delta \tau\) et ce qu’il impose en termes de dissipation d’énergie dépend de la loi de comportement. Les choix de normalisation retenus sont les suivants :
CZM_OUV_MIX - Contrôle de l’incrément d’énergie dissipée normalisée (variable interne PCENERDI) \(\Delta \psi=\Delta \tau \times G_c\)
CZM_TAC_MIX - Contrôle de l’incrément d’énergie dissipée normalisée (variable interne PCENERDI) \(\Delta \psi=\Delta \tau \times G_c\)
CZM_EXP_MIX - Contrôle de l’incrément d’énergie dissipée normalisée (variable interne PCENERDI) \(\Delta \psi=\Delta \tau \times G_c\)
CZM_LAB_MIX - Contrôle de l’incrément du saut de déplacement maximal (variable interne SEUILDEP) \(\Delta \kappa = \Delta \tau \times \delta^c\)
Pour finir, on notera que la résolution de cette équation globale peut être obtenue par la méthode décrite dans [ 5 ].
Mots clés#
Lois CZM_xxx_REG#
Les lois de comportement cohésives CZM_EXP_REG et CZM_LIN_REG sont utilisées dans STAT_NON_LINE et DYNA_NON_LINE. Elles sont utilisables sur des éléments de joint 2D ou 3D avec les modélisations : PLAN_JOINT, AXIS_JOINT ou 3D_JOINT.
Quatre paramètres sont à saisir dans DEFI_MATERIAU sous les mots clé RUPT_FRAG :
GC : densité d’énergie de surface critique (Pression x Longueur)
SIGM_C: contrainte critique (Pression)
PENA_ADHERENCE : pénalisation de l’adhérence
PENA_CONTACT : pénalisation du contact (optionnel valant 1 par défaut)
Le mot clé RUPT_FRAG_FO permet de faire dépendre les paramètres de la température (voir documentation de DEFI_MATERIAU [U4.43.01]).
Commandes |
|||
STAT_NON_LINE |
COMPORTEMENT |
RELATION |
CZM_EXP_REG |
CZM_LIN_REG |
|||
DYNA_NON_LINE |
COMPORTEMENT |
RELATION |
CZM_EXP_REG |
CZM_LIN_REG |
|||
AFFE_MODELE |
MODELISATION |
PLAN_JOINT |
|
AXIS_JOINT |
|||
3D_JOINT |
|||
DEFI_MATERIAU |
RUPT_FRAG |
GC |
|
SIGM_C |
|||
PENA_ADHERENCE |
|||
PENA_CONTACT |
|||
RUPT_FRAG_FO |
GC |
||
SIGM_C |
|||
PENA_ADHERENCE |
|||
PENA_CONTACT |
Ces lois de comportement cohésives sont testées en statique : voir cas test SSNP118 (doc [V6.03.118]), SSNP133 (doc [V6.03.133]), SSNA115 (doc [V6.01.115]) et SSNV199 (doc [V6.03.199]) et en dynamique: cas test SDNS105 (doc [V5.06.105]).
Lois CZM_xxx_MIX#
Les lois de comportement cohésives CZM_ELAS_MIX, CZM_TAC_MIX, CZM_OUV_MIX, CZM_EXP_MIX, CZM_TRA_MIX, CZM_FAT_MIX et CZM_LAB_MIX sont utilisées dans STAT_NON_LINE (et DYNA_NON_LINE pour les trois premières). Elles sont utilisables avec toutes les modélisations de type INTERFACE en 2D et 3D.
Pour la loi CZM_ELAS_MIX, six paramètres sont à saisir dans DEFI_MATERIAUsous le mot clé CZM_ELAS :
RIGI_NOR_TRAC : module de raideur \({k}_{nt}\) dans la direction normale en traction (\(J/{m}^{4}\))
RIGI_NOR_COMP : module de raideur \({k}_{nc}\) dans la direction normale en compression (\(J/{m}^{4}\))
RIGI_TAN : module de raideur \({k}_{t}\) dans la direction tangente (\(J/{m}^{4}\))
ADHE_NOR : type d’adhérence dans la direction normale (“PARFAITE”, “UNILATER”, “ELAS”)
ADHE_TAN : type d’adhérence dans la direction tangente (“PARFAITE”, “ELAS”)
On peut éventuellement renseigner la raideur dans la direction normale par RIGI_NOR si elle est identique en traction et en compression (\({k}_{nt}={k}_{nc}\)).
Pour les lois CZM_TAC_MIX, CZM_OUV_MIX, CZM_EXP_MIX et CZM_FAT_MIX, quatre paramètres sont à saisir dans DEFI_MATERIAU sous le mot clé RUPT_FRAG :
GC : densité d’énergie de surface critique (Pression x Longueur)
SIGM_C : contrainte critique (Pression)
PENA_LAGR : pénalisation du lagrangien (optionnel, 100 par défaut)
RIGI_GLIS : rigidité du glissement, uniquement pour CZM_OUV_MIX et CZM_FAT_MIX (optionnel, 10 par défaut)
CINEMATIQUE : Détermine les modes d’ouverture autorisés par la loi CZM_TAC_MIX. Il peut s’agir d’une condition de contact (“UNILATERAL”), un glissement dans le plan tangent (“GLIS_2D”) ou un glissement dans une seule direction (“GLIS_1D”). (optionnel, “UNILATERAL” par défaut)
Pour la loi CZM_TRA_MIX six paramètres sont à saisir dans DEFI_MATERIAU sous le mot clé RUPT_DUCT :
GC : densité d’énergie de surface critique (Pression x Longueur)
SIGM_C : contrainte critique (Pression)
COEF_EXTR : coefficient de forme du trapèze (sans dimension)
COEF_PLAS : coefficient de forme du trapèze (sans dimension)
PENA_LAGR: pénalisation du lagrangien (optionnel, 100 par défaut)
RIGI_GLIS: rigidité du glissement, uniquement pour CZM_OUV_MIX et CZM_FAT_MIX (optionnel, 10 par défaut)
Pour la loi CZM_LAB_MIX six paramètres sont à saisir dans DEFI_MATERIAU sous le mot clé RUPT_DUCT :
SIGM_C : Contrainte maximale supportable par l’interface acier-béton
GLIS_C: Glissement pour lequel la contrainte à l’interface est maximale
ALPHA : Paramètre de forme de la loi d’adhérence acier-béton pour un faible glissement
BETA : Paramètre de forme de la loi d’adhérence acier-béton pour un grand glissement
PENA_LAGR : Pénalisation du lagrangien (optionnel, 100 par défaut)
CINEMATIQUE : Détermine les modes de glissement autorisés par la loi d’interface. Il peut s’agir d’une condition de contact (“UNILATERAL”), un glissement dans le plan tangent (“GLIS_2D”) ou un glissement dans une seule direction (“GLIS_1D”). (optionnel, “UNILATERAL” par défaut)
Commandes |
|||
STAT_NON_LINE |
COMPORTEMENT |
RELATION |
CZM_ELAS_MIX CZM_TAC_MIX |
CZM_OUV_MIX CZM_EXP_MIX CZM_FAT_MIX CZM_TRA_MIX |
|||
AFFE_MODELE |
MODELISATION |
PLAN_INTERFACE |
|
PLAN_INTERFACE_S |
|||
AXIS_INTERFACE |
|||
AXIS_INTERFACE_S |
|||
3D_INTERFACE |
|||
3D_INTERFACE_S |
|||
DEFI_MATERIAU |
CZM_ELAS |
RIGI_NOR |
|
RIGI_TAN |
|||
ADHE_NOR |
|||
ADHE_TAN |
|||
PENA_LAGR_ABSO |
|||
DEFI_MATERIAU |
RUPT_FRAG |
GC |
|
SIGM_C |
|||
PENA_LAGR |
|||
RIGI_GLIS |
|||
CINEMATIQUE |
RUPT_DUCT |
GC |
||
SIGM_C |
|||
COEF_EXTR |
|||
COEF_PLAS |
|||
PENA_LAGR |
|||
RIGI_GLIS |
|||
CZM_LAB_MIX |
SIGM_C |
||
GLIS_C |
|||
ALPHA |
|||
BETA |
|||
PENA_LAGR |
|||
CINEMATIQUE |
Ces lois de comportement cohésives sont testées en statique: voir par exemple les cas test SSNP118 (doc [V6.03.118]), SSNP139 (doc [V6.03.139]), SSNA115 (doc [V6.01.115]), SSNV199 (doc [V6.03.199]), SSNP151 (doc [V6.03.151], SSNA120 (doc [V6.01.120]).
Bibliographie#
BARENBLATT G. I., The mathematical theory if equilibrium cracks in brittle fracture. Adv. Appl. Mech ., 7, pp. 55-129 (1962).
CHARLOTTE M., MARIGO J.J., FRANCFORT G., TRUSKINOVSKY L. : “Revisiting brittle fracture as an energy minimization problem : Comparisons of Griffith and Barenblatt surface energy models“, Symposium on continuous damage and fracture.
CHARLOTTE M., LAVERNE J. , MARIGO J.-J, Initiation of cracks with cohesive force models: a variational approach. European Journal of Mechanics, A/Solids , v 25, n 4, July/August, 2006, p 649-669
JAUBERT A. et MARIGO J.-J., Justification of Paris-type fatigue laws from cohesive forces model via a variational approach, Continuum Mechanics and Thermodynamics , Volume 18, pages 23-45 (2006).
LAVERNE J.: “Formulation énergétique de la rupture par des modèles de forces cohésives: considérations théoriques et implantations numériques“. Thèse de l’Université Paris XIII, novembre 2004 (sous la direction de J.-J. MARIGO et E. LORENTZ).
LAVERNE J. , LORENTZ E.: Documentation de référence du Code_Aster R3.06.11
TALON C., CURNIER A. A model of adhesion coupled to contact end friction Eur. J. Mech. A/Solids 22 (4), 545-565 (2003).
LORENTZ E., A mixed interface finite element for cohesive zone models, Comput. Methods Appl. Mech. Engrg. 198 (2008), 302-317.
DAVID M., Approche multi-échelle du comportement mécanique des structures en béton armé – Application aux enceintes de confinement des centrales nucléaires. Thèse de doctorat
LORENTZ E. ADELAHYD II - Recommandations relatives à la simulation numérique de zones cohésives par éléments finis d’interface. Note interne EDF R&D n° 6125-1724-2021-01404.