u2.04.03 Choix du comportement élasto-(visco)-plastique#
Résumé
L’objectif de cette note est de donner des conseils à un utilisateur souhaitant réaliser des calculs avec des comportements non-linéaires de type élasto-plastique ou élasto-visco-plastique pour choisir une loi adaptée aux modélisations envisagées. Les matériaux concernés sont principalement les métaux. Pour les autres types de matériaux, le premier paragraphe renvoie aux références appropriées.
Les spécificités et capacités des lois élasto-visco-plastiques sont décrites. Puis une description des particularités des différents types d’écrouissage est faite, ce qui permet d’émettre quelques recommandations.
Quelques conseils généraux sur l’identification des paramètres des lois sont donnés.
On aborde aussi les effets de viscosité et de la température. On donne enfin des éléments de vérification de la validité des choix effectués concernant le comportement et ses paramètres.
Spécificités et capacités des lois élasto-visco-plastiques#
Nous détaillons ici les lois de comportement élasto-(visco)-plastiques disponibles dans Code_Aster, (pour les modélisations 2D et 3D), et leurs spécificités.
Les lois élasto-plastiques disponibles#
Hormis l’élasticité linéaire (ELAS), les modèles élasto-plastiques disponibles sont(cf. u4.51.11 Comportements non linéaires u4.51.11 Comportements non linéaires):
Les lois élasto-visco-plastiques disponibles#
Les comportements élasto-visco-plastiques disponibles sont:
Le choix du type d’écrouissage#
Écrouissage isotrope#
Les lois élastoplastiques à écrouissage isotrope permettent de modéliser une augmentation de la taille de domaine élastique avec la déformation plastique identique dans toutes les directions. Si certains matériaux peuvent correspondre à ce type de lois, pour la plupart des métaux, qui présentent un fort écrouissage cinématique, ces lois sont adaptées aux modélisations dans lesquelles les chargements globaux sont monotones, ou éventuellement avec des décharges de faible amplitude, pour rester dans le régime élastique.
C’est une condition nécessaire pour que la réponse du modèle soit conforme à la réalité (un modèle complet, à écrouissages cinématiques et isotropes non linéaires, donnerait dans ce cas le même résultat). Mais ce n’est pas une condition suffisante: il peut exister des structures dans lesquelles un chargement monotone global produit des décharges locales.
La validité de l’approche avec un écrouissage isotope peut être vérifiée a posteriori: il suffit qu’en tout point, aucune décharge n’ai donné lieu à une entrée en plasticité. Cette vérification est détaillé e au § 5.2
Pour définir les paramètres d’une loi à écrouissage isotrope, il faut identifier le comportement sur une courbe de traction, en vérifiant que l’identification est bien effectuée dans la plage de déformations susceptible d’être rencontrée au cours du calcul de structure envisagé.
Les différents types d’écrouissage proposés (courbe, loi puissance) permettent en général de bien reproduire l’essai de traction (voir :ref:`r5.03.02`et les documents de formation: `15-Constitutive laws <https://www.code-aster.org/V2/spip.php?action=dw2_out&id=1457>`_ ` <https://www.code-aster.org/V2/spip.php?action=dw2_out&id=1457>`_).
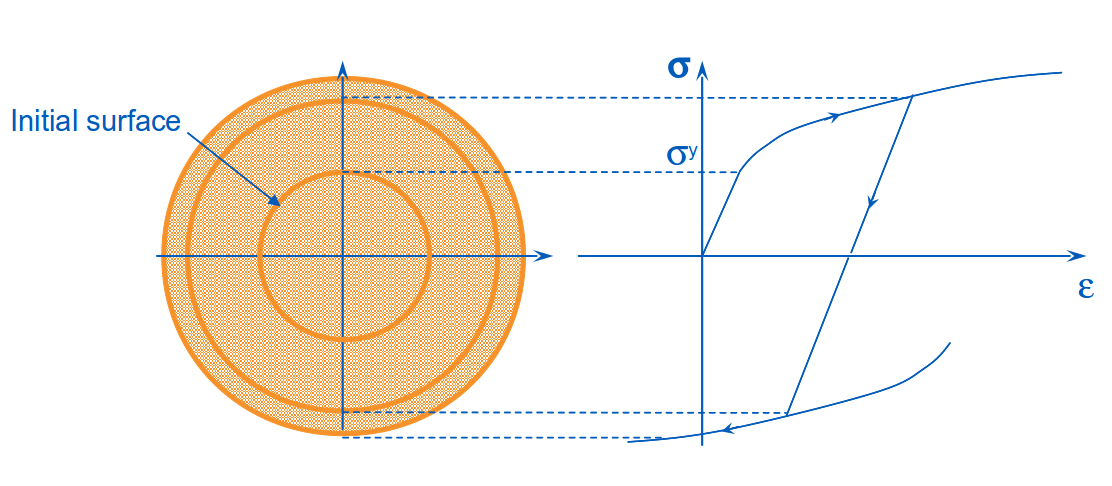
Évolution du domaine d’élasticité 3D b)Évolution du domaine d’élasticité en 1D
Figure 2.3.1-a . Critère de Von Mises, écrouissage isotrope
Dans certains cas (mécanique de la rupture), il est nécessaire d’approcher le comportement élastoplastique par un comportement élastique non linéaire équivalent: ce sont les lois de Hencky ( ELAS_VMIS_LINE, ELAS_VMIS_TRAC, ELAS_VMIS_PUIS ). Là encore, ces lois sont valides seulement avec un chargement monotone, et cette fois sans aucune décharge, car elles ne permettent pas de modéliser la déformation plastique.
Une façon très simplifiée d’utiliser un écrouissage isotrope est de considérer qu’il est linéaire (VMIS_ISOT_LINE). Ceci peut être valide dans une gamme de déformations, et non valide dans une autre. Prenons par exemple des courbes de traction d’un acier inoxydable:
Figure 2.3.1-b . Courbes de traction jusqu’à 20% de déformation
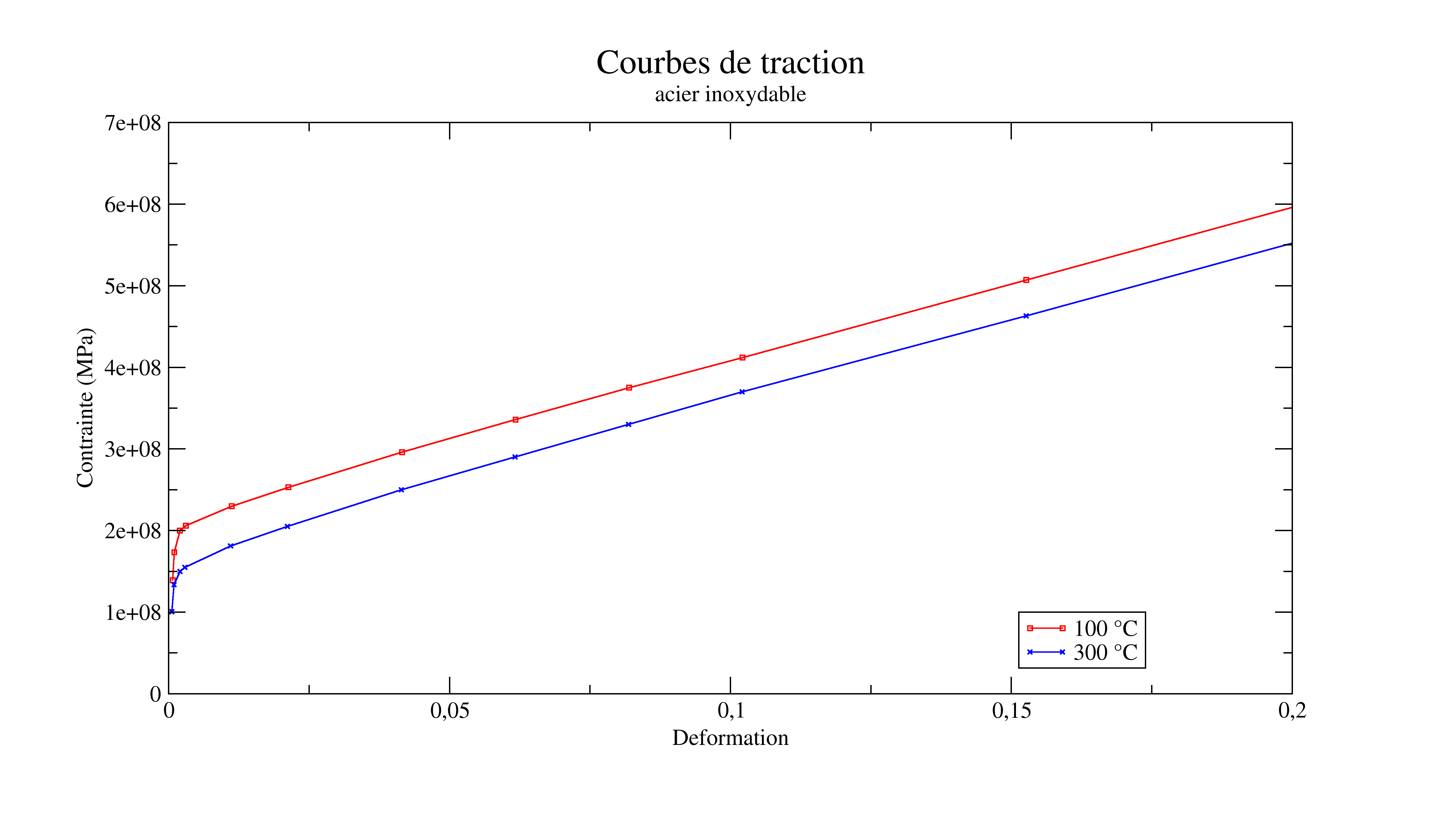
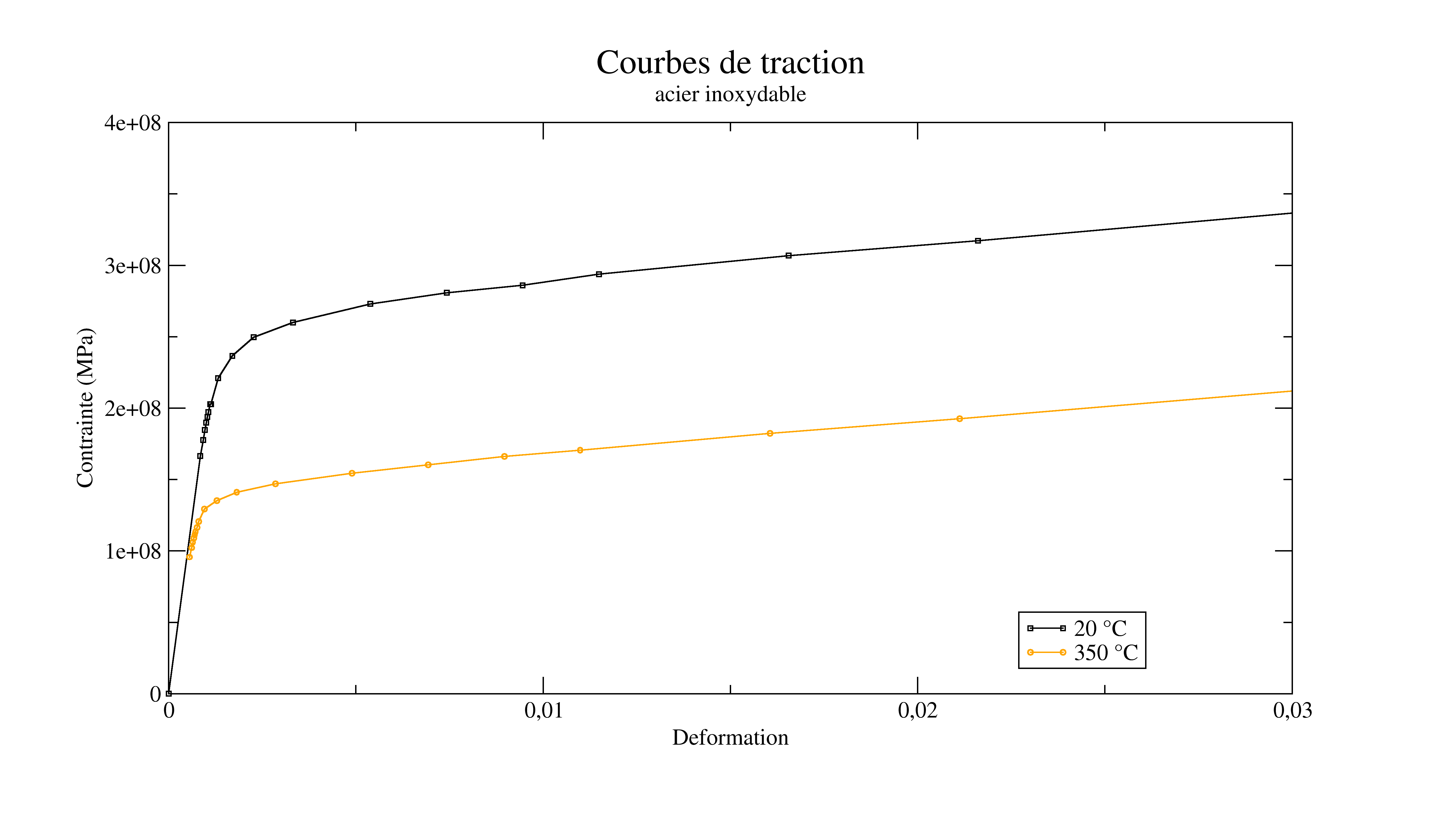
Figure 2.3.1-c . Courbes de traction jusqu’à 3% de déformation
On constate sur la figure qu’il est possible de modéliser la courbe de traction par un écrouissage linéaire, en grandes déformations , si on ne s’intéresse pas avec précision aux petites déformations (inférieures à 1 %). Dans le cas contraire (figure ), il semble bien délicat de construire un écrouissage linéaire qui soit valable dès l’entrée en plasticité.
De plus, c e type d’écrouissage (comme tous les modèles à écrouissage linéaire) risque de surestimer les contraintes en cas de fortes déformations, (ou de sous-estimer les déformations à contrainte imposée) car rien ne limite la courbe d’écrouissage. Une parade à cette difficulté est décrite au paragraphe 5.1 .
En utilisant le comportement VMIS_ISOT_TRAC , les risques sont moins grands: la courbe de traction est définie par une fonction DEFI_FONCTION, etla valeur maximale de l’abscisse (déformation) permet de définir le domaine de validité et ainsi d’éviter dans le calcul de structure de dépasser cette valeur (attention à laisser la valeur par défaut PROL_DROITE=”EXCLU” dans DEFI_FONCTION).
Écrouissage cinématique linéaire#
Les lois élasto-plastiques à écrouissage cinématique linéaire sont adaptées aux modélisations dans lesquelles les chargements globaux contiennent quelques décharges, et pour lesquels l’approximation de la courbe d’écrouissage par une droite est acceptable .
Elles permettent de traduire de façon très simplifié l’effet Bauschinger, présent pour la plupart des métaux. Examinons la loi VMIS_CINE_LINE:
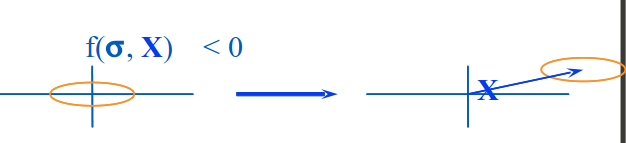
Évolutiondu domaine d’élasticité 3D (coupe)
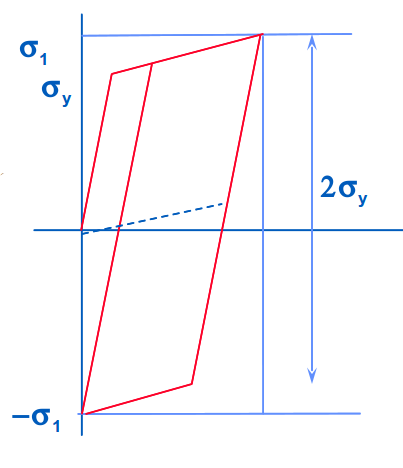
b)Évolutiondu domaine d’élasticité en 1D
Figure 2.3.2-a . Critère de Von Mises, écrouissage cinématique
Avantage :
L’intérêt de ce modèle réside dans sa simplicité; Il permet notamment de tester rapidement l’effet de l’écrouissage cinématique, car l’identification et la résolution sont très rapides.
Limitations :
Ce modèle ne présente aucun écrouissage isotrope.
L’approximation de la courbe réelle de traction-compression est souvent médiocre (cf paragraphe précédent)
Ce modèle (comme tous les modèles à écrouissage linéaire) risque de surestimer les contraintes en cas de fortes déformations, (ou de sous-estimer les déformations à contrainte imposée) car rien ne limite la courbe d’écrouissage.
Enfin, si le chargement comporte des cycles, ce modèle tend très vite vers un cycle stabilisé (dans le cas uni-axial, il est atteint en un seul cycle), ce qui ne correspond pas à la réalité.
Pour lever la première limitation, il est possible de combiner l’écrouissage cinématique linéaire avec un écrouissage isotrope: ce sont les modèles VMIS_ECMI_LINE (mais qui présente les 3 autres inconvénients) , VMIS_ECMI_TRAC ( qui permet également de répondre à la deuxième limitation ).
Il faut être très prudent lors de l’identification de VMIS_ECMI_TRAC (cf. r5.03.16 Relation de comportement élastoplastique à écrouissage cinématique linéaire et isotrope non linéaire. Modélisations 3D et contraintes planes. r5.03.16 Relation de comportement élastoplastique à écrouissage cinématique linéaire et isotrope non linéaire. Modélisations 3D et contraintes planes.) : en effet, la part d’écrouissage cinématique, dans la gamme de déformation étudiée, doit rester inférieure à la part d’écrouissage isotrope, sinon, on peut obtenir un écrouissage isotrope négatif.
Écrouissage cinématique non linéaire : lois de J.L.Chaboche#
Ces lois permettent à la fois de traduire l’effet Bauschinger (écrouissage cinématique), son évolution non linéaire, et l’écrouissage isotrope, ainsi que d’autres phénomènes (effet de mémoire de la déformation plastique maximale, restauration).
Dans leur forme la plus simple ( VMIS_CIN1_CHAB ) elles conduisent à une forme particulière de la courbe d’écrouissage, avec une asymptote déterminée. L’idée qui sous-tend ces modèles est de bien reproduire les cycles de traction compression, en taille et en forme. Pour améliorer la description des courbes réelles, on peut introduire plusieurs variables cinématiques indépendantes, chacun ayant un rôle spécifique pour représenter un niveau de déformation. Dans Code_Aster, on s’est limité à deux variables cinématiques ( VMIS_CIN2_CHAB ).
Leur identification est plus complexe que pour les modèles précédents: le nombre de paramètres augmente, et il faut a minima un essai cyclique (traction-compression sur plusieurs cycles) pour les identifier correctement. De plus des essais à plusieurs niveaux de déformations sont souvent nécessaires (et difficiles à représenter totalement).
Là encore il est indispensable de bien cibler la gamme de déformation attendue dans les études, afin que les paramètres soient ajustés à de niveau de déformation. Si on utilise des paramètres provenant d’une identification antérieure, il faut a minima vérifier (via SIMU_POINT_MAT par exemple) sur une modélisation de l’essai de traction-compression) la réponse du modèle pour ces paramètres.
Pour illustrer l’avantage d’utiliser un écrouissage cinématique non linéaire au-delà de quelques cycles de chargement, considérons un exemple de cycles de traction-compression à déformation imposée:
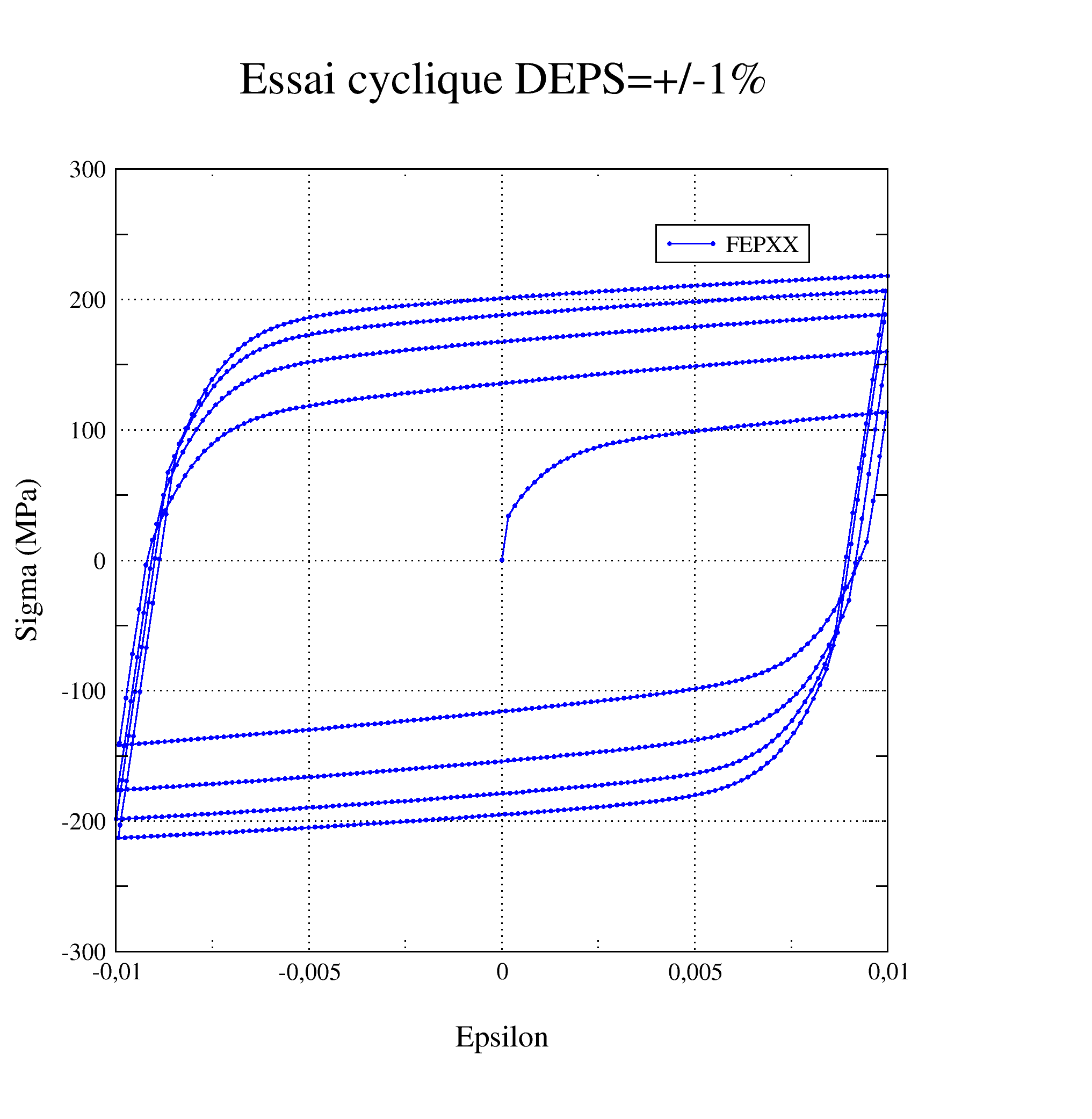
Cette courbe est en fait une courbe numérique (simulée avec VMIS_CIN2_CHAB) mais elle reproduit correctement les courbes expérimentales sur l’acier inoxydable considéré. Elle servira de référence pour les illustrations ci-dessous.
L’approximation de cette courbe par un écrouissage cinématique linéaire (avec une composante isotrope, ajustée sur la première courbe de traction) montre que la réponse est très éloignée:
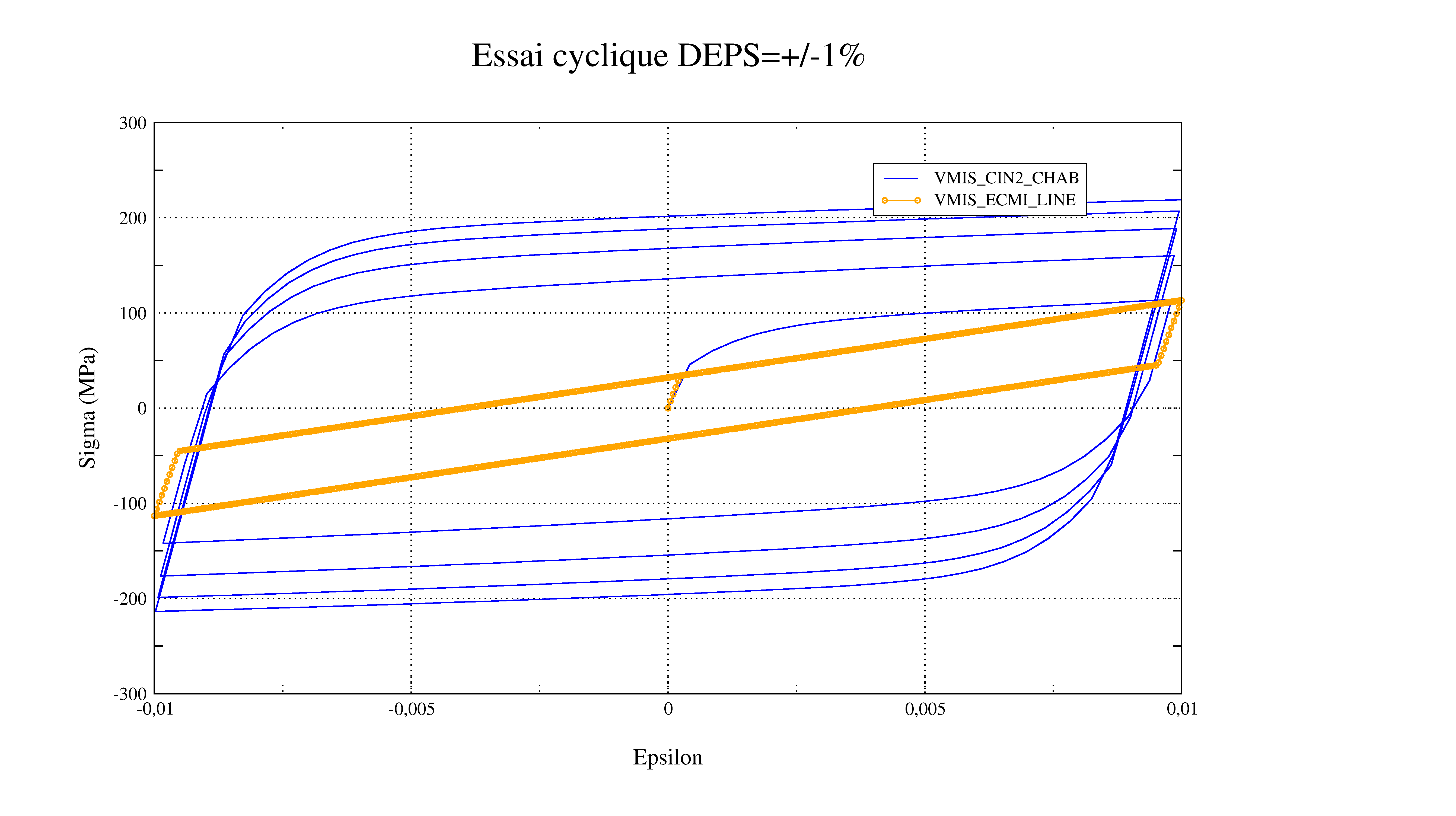
On peut améliorer la représentation des tout premiers cycles en choisissant VMIS_ECMI_TRAC, et en recalant les valeurs du coefficient de Prager. On constate que si les 2 premiers cycles sont bien représentés, le modèle VMIS_ECMI_TRAC tend vers un état stabilisé avec une amplitude de contrainte très supérieure à la courbe réelle.
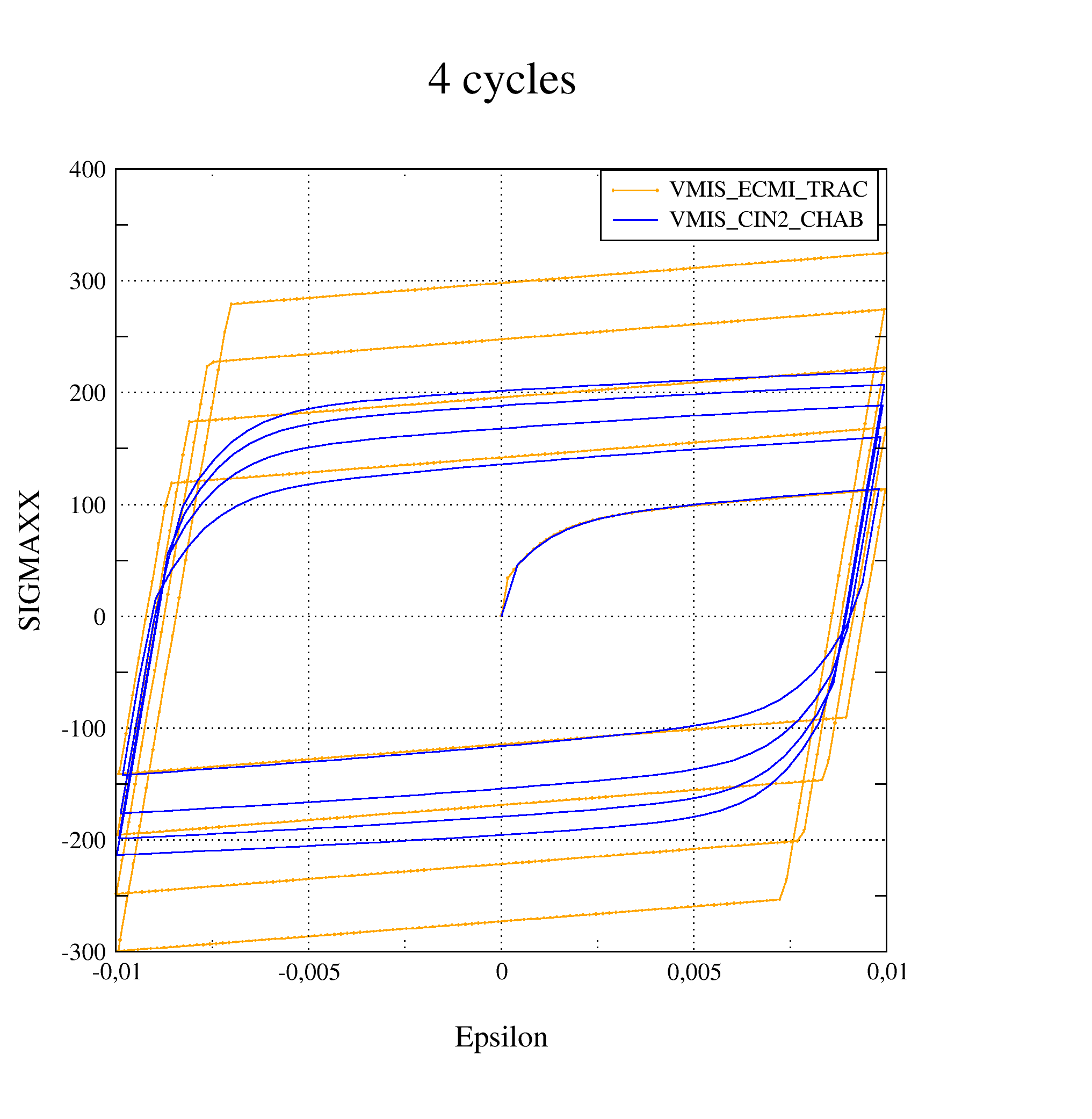
En poursuivant les cycles, ce modèle tendrait d’ailleurs vers un cycle adapté, d’amplitude \(1600\mathit{MPa}\) !
Si la modélisation vise à prévoir un phénomène de déformation progressive, l’emploi de tels modèles est délicat: en effet, ils conduisent à un rochet constant à contrainte moyenne non nulle, de valeur très supérieure au rochet expérimental (à moins de choisir les paramètres pour que l’un des écrouissages cinématiques soit linéaire, auquel on retrouve (trop) rapidement un cycle stabilisé accommodé).
Il est préférable pour ces situations d’utiliser le modèle de TAHERI.
Si la situation étudiée met en œuvre un pré-écrouissage, il peut être utile d’identifier le modèle VMIS_CIN2_MEMO sur des essais cycliques avec pré-écrouissage. (voir par exemple v6.08.105 SSND105 - Loi de comportement visco-élasto-plastique avec effet de mémoire v6.08.105 SSND105 - Loi de comportement visco-élasto-plastique avec effet de mémoire).
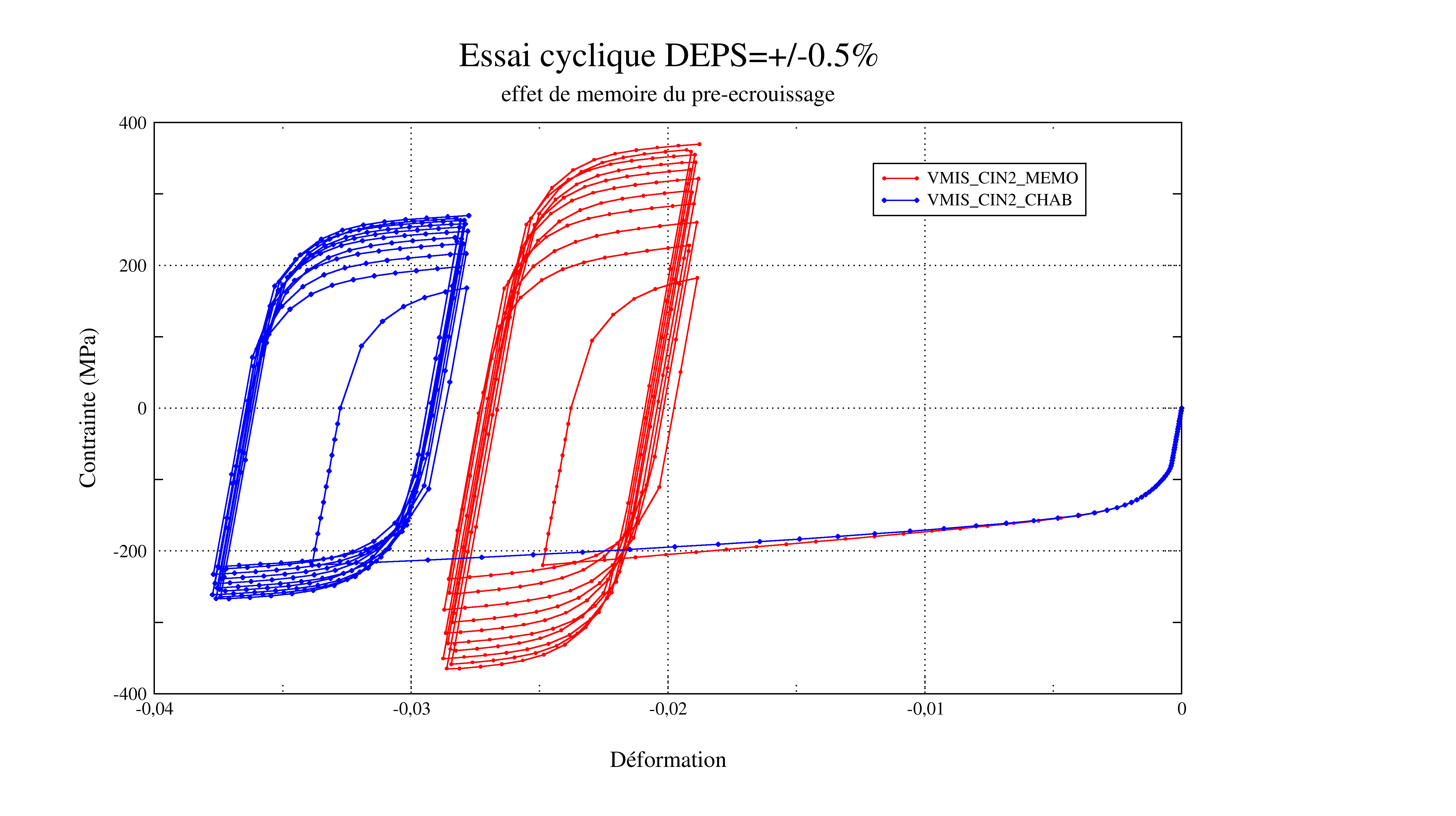
D’autres aspects peuvent être pris en compte, en particulier le sur-écrouissage dû à des chargements cycliques non proportionnels. Ceci est modélisé dans VMIS_CIN2_CHAB (sans effet de mémoire) ou VMIS_CIN2_MEMO (avec effet de mémoire) via les paramètres DELTA1, DELTA2 .
Conclusions sur le choix du type d’écrouissage élasto-plastique#
Les paragraphes précédents montrent que ce choix est essentiel:
pour un chargement monotone, il convient de bien approcher la courbe de traction dans la gamme de déformation visée, et de vérifier que le calcul de structure reste dans cet intervalle
pour modéliser un ou deux cycles de charge-décharge, un modèle à écrouissage cinématique linéaire peut être utilisé, à condition de bien vérifier la réponse en un ou plusieurs points.
Pour simuler plusieurs cycles de chargement, un modèle de type Chaboche (ou Taheri) est nécessaire.
Influence de la vitesse#
Pour les matériaux purement élasto-plastiques, le temps utilisé dans les simulations est un simple paramètre du chargement (même s’il a une signification physique dans les cas thermo-mécaniques) et n’a pas d’influence directe sur les lois de comportement.
Mais il nécessaire de le prendre en compte dans le comportement dans les cas suivants:
grande vitesse de chargement: loi élasto-plastique de Johnson-Cook
viscosité: lois élasto-visco-plastiques.
Loi de Johnson-Cook#
Cette loi permet de prendre en compte directement la vitesse de déformation, et la température, dans l’évolution de l’écrouissage isotrope (cf. r5.03.02`page 11). Ellepermet de traiter les problèmesd’impact, et de mettre en œuvre le couplage thermo-mécanique (voir par exemple :ref:`v7.20.105 v7.20.105 HSNA105 - Expansion d’un cylindre creux infini avec prise en compte des dissipations thermiques dues aux déformations mécaniques).
Élasto-visco-plasticité à écrouissage isotrope#
Le modèle de élasto-visco-plastique de Lemaître permet de prendre en compte le fluage secondaire (à vitesse constante – il peut se ramener pour certaines valeurs particulières des paramètres à une relation de comportement de Norton) et le fluage primaire. (cf. r5.03.08 Intégration des relations de comportement viscoélastoplastiques dans les opérateurs demécanique non linéaire ).
La surface de charge reste isotrope (pas d’écrouissage cinématique). Les essais de fluage, de relaxation, ou les essais de traction à différentes vitesses de déformation sont nécessaires à l’identification des paramètres.
Là encore, il faut vérifier que les valeurs ainsi obtenues sont valides dans les études envisagées, c’est à dire que les vitesses de déformation rencontrées dans les études sont bien dans la gamme de celles qui ont servi à l’identification.
Dans le cas où on veut aller plus loin, c’est à dire modéliser le fluage tertiaire (le prise en compte des grandes déformations est souvent nécessaire), on pourra utiliser les modèles suivants, qui intègrent un endommagement de fluage:
VISC_ENDO_LEMA, VENDOCHAB
- cf.
r5.03.15 Comportement viscoplastique avec endommagement de CHABOCHE r5.03.15 Comportement viscoplastique avec endommagement de CHABOCHE
HAYHURST
Élasto-visco-plasticité à écrouissage cinématique non linéaire#
Les comportements suivants permettent de prendre en compte l’écrouissage cinématique:
VISC_CIN1_CHAB, VISC_CIN2_CHAB,VISC_CIN2_MEMO
Ces lois sont des extensions des lois élasto-plastiques de J.L.Chaboche au cas visco-plastique. Les divers composants de lois de Chaboche précédemment décrits sont présents , et il faut en plus intégrer la viscosité (de type Lemaître, c’est à dire permettant de reproduire les fluages primaire et secondaire). Ceci signifie que leur identification devra prendre en compte la vitesse de déformation (par exemple sur les essais cycliques).
D’autres phénomènes peuvent être représentés (le durcissement lié à la non proportionnalité du chargement, la restauration d’écrouissage), par le modèle suivant:
VISCOCHAB
L’identification complète de ce modèle nécessite un grand nombre d’essais différents: essais cycliques à différentes vitesses, et différentes niveaux de déformation, avec pré-écrouissage, essais de traction-torsion, essais de relaxation.
Loi de viscosité en sinus hyperbolique et écrouissage isotrope#
Une autre forme de loi de viscosité est proposée dans les modèles suivants:
VISC_ISOT_LINE, VISC_ISOT_TRAC
Ils sont à écrouissage isotrope, et nécessitent l’emploi de SIMO_MIEHE .
Identifier les paramètres : quels essais sont nécessaires ?#
L’identification des paramètres des modèles devient vite difficile manuellement, sauf pour les modèles les plus simples ( VMIS_CINE_LINE, VMIS_ISOT_LINE, VMIS_ISOT_TRAC ).
On a donc recours à une procédure d’optimisation, disponible dans la commande MACR_RECAL u4.73.02 Macro-commande MACR_RECAL u4.73.02 Macro-commande MACR_RECAL.
Il y a plusieurs avantages à utiliser cette commande:
la simulation permettant de trouver les courbes numériques (qui seront comparées aux courbes expérimentales) est un fichier de commandes classique de Code_Aster, qui peut être lancé de façon autonome, et qui représente un calcul quelconque (pas forcément sur un point matériel);
les coefficients recalés sont directement utilisables dans les études, puisque ce sont des paramètres du fichier de simulation;
de nombreux algorithmes sont disponibles, ainsi que des modes de calcul permettant d’utiliser des architectures multi-processeurs si nécessaire.
Des détails sur les algorithmes utilisés peuvent être consultés dans le document r4.03.06 r4.03.06.
Mais les outils ne font pas tout! En effet, avant de chercher à identifier les paramètres d’un modèle, il faut se poser plusieurs questions:
le nombre d’essais dont on dispose est il suffisant vis-à-vis du nombre de paramètres à recaler;
les essais mettent-ils en évidence les phénomènes physiques simulés par la loi de comportement (déjà évoqués précédemment) : charge-décharge, cycles, effets de mémoire, de restauration, de non radialité, grande vitesse, viscosité, … );
peut-on séparer ces effets, afin d’identifier les paramètres successivement, ce qui allégera la tâche d’optimisation et permettra de mieux appréhender les résultats.
Pour rentrer davantage dans le détail de l’identification, des documents spécifiques aux différents comportements sont à écrire; En ce qui concerne les comportements élasto-visco-plastique cycliques, une notice plus détaillée est en cours d’écriture, issue de travaux EDF/R&D [ 4 ] et [ 5 ].
D’autre part, une méthodologie assez générale est proposée dans [ 1 ] page 617 et [ 3 ].
Les simulations anisothermes#
Lors de simulations anisothermes, il faut la plupart du temps prendre en compte la variation des paramètres avec la température. Il est donc nécessaire de veiller à la bonne identification de ces paramètres.
Dans ce paragraphe, on illustre quelques erreurs classiques induites par l’interpolation ou l’extrapolation des valeurs en fonction de la température.
Les tests sont effectués avec les lois VMIS_ISOT_TRAC et VMIS_CIN1_CHAB. Toutefois, les conclusions retenues ne sont pas exclusives à une loi particulière.
Dangers de l’extrapolation :#
Pour mener une étude thermo-mécanique avec une loi de comportement dont les coefficients dépendent de la température, l’utilisateur peut vouloir extrapoler ses courbes pour effectuer son étude à une température donnée. Ceci est fortement déconseillé. Un exemple:
Dans le cas d’un écrouissage isotrope, il est courant d’utiliser des courbes de traction expérimentales pour quelquestempératures, variant par exempleentre \(20°\) et \(350°\) . Les courbes de traction sont renseignées dans le fichier de commandes pour différentes températures avec la commande ‘DEFI_NAPPE’.Supposons que l’on a défini les prolongements par PROL_DROITE=”LINEAIRE” et PROL_GAUCHE=”LINEAIRE”.
On suppose que l’utilisateur souhaite réaliser un calcul à une température qui dépasse la température maximale à laquelle ont été faites les identifications des courbes de traction, soit 1000°C par exemple (c’est un exemple volontairement exagéré, mais qui permet d’illustrer le propos). Les coefficients matériaux de la loi seraient de ce fait obtenus à \(1000°C\) par extrapolation.
Ceci peut conduire à des résultats aberrants ( Figure 4.1-a ): la courbe de traction obtenue à la température extrapolée de \(1000°C\) présente une concavité et une pente d’écrouissagecontradictoire par rapport aux autres courbes et par rapport à la réalité.
Pour éviter ce genre d’erreur, il faut éviter toute extrapolation par rapport àla température.
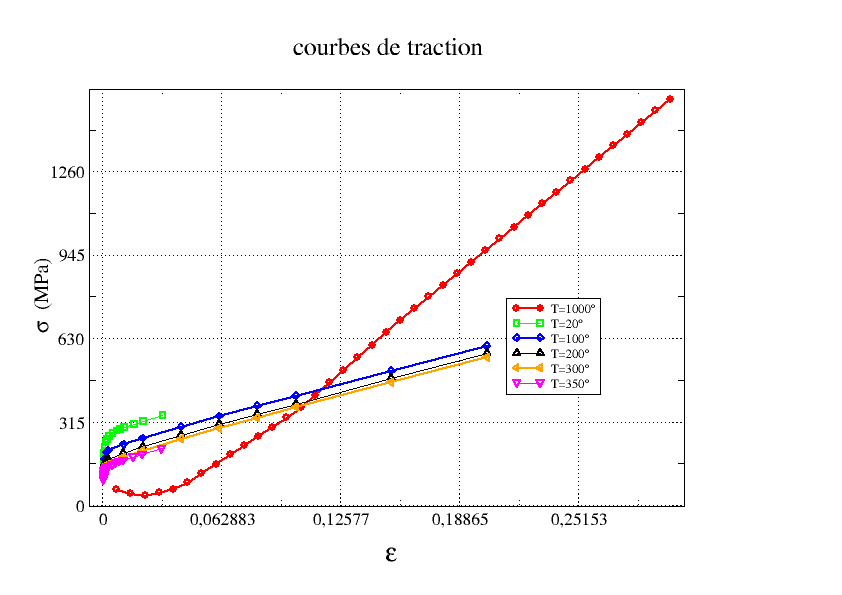
Figure 4.1-a *. Courbes de traction en fonction de la température – résultat à* \(1000°C\)
Erreur dans l’interpolation de la température#
Cet exemple met en évidence une possibilité d’erreur dans l’interpolation de la température généralement due à une évolution non monotone des coefficients matériaux avec la température. Il suffit qu’un seul des coefficients n’évolue pas d’une façon monotone pour que l’interpolation entre deux courbes de traction mène à une courbe qui ne soit pas comprise entre les deux extrêmes.
Pour exhiber ce genre d’erreur, avec une loi de comportement type ‘VMIS_CIN1_CHAB’, on a mis en place le test suivant:
Supposons connues trois courbes de traction identifiées expérimentalement à 3 températures différentes: \(20°\) , \(100°\) et \(200°C\) . On cherche à identifier les paramètres de la loi ‘VMIS_CIN1_CHAB’à ces trois températures. Pour bien comprendre, rappelons brièvement la forme d’écrouissagede la loi ‘VMIS_CIN1_CHAB’:
Critère: \({(\sigma -C\alpha )}_{\text{eq}}-R(p)\le 0\)
écrouissagecinématique: \(\dot{\alpha}=\dot{{\varepsilon}^{p}}-\gamma \alpha \dot{p}\)
écrouissageisotrope: \(R(p)={R}_{\infty}+({R}_{0}-{R}_{\infty}){e}^{-\text{bp}}\)
Supposons que les résultats de 3 identifications à trois températures différentes soient:
à \(T=20°\) ; les paramètres matériaux identifiés sont: \({C}_{1}\) , \({\gamma}_{1}\) , \({R}_{0}\) , non nuls, et \({R}_{\infty}\mathrm{\simeq }{R}_{0}\) \(b\mathrm{\simeq }0\) , (soit un comportement cinématique quasi pur);
à \(T=100°\) ; les coefficients matériaux identifiés sont: \({C}_{2}\mathrm{\simeq }0\) , \({R}_{0}\) , \({R}_{\infty}\) , \({b}_{2}\) .non nuls,(soit uncomportement isotrope quasi pur)
à \(T=200°\) ;les coefficients matériaux sont: \({C}_{3}\) , \({\gamma}_{3}\) , \({R}_{0}\) ,non nuls, \({R}_{\infty}\mathrm{\simeq }{R}_{0}\) , \({b}_{3}\mathrm{\simeq }0\) , (soit à nouveau un comportement cinématique pur).
Chacune de ces identifications est suffisamment précise, et permet de retrouver, pour chaque température, des courbes numériques très proches des courbes expérimentales.
La simulation de la courbe de traction àla température de \(50°C\) est représentée sur la figure )
On constate que la courbe obtenue par interpolation à \(50°C\) est erronée:
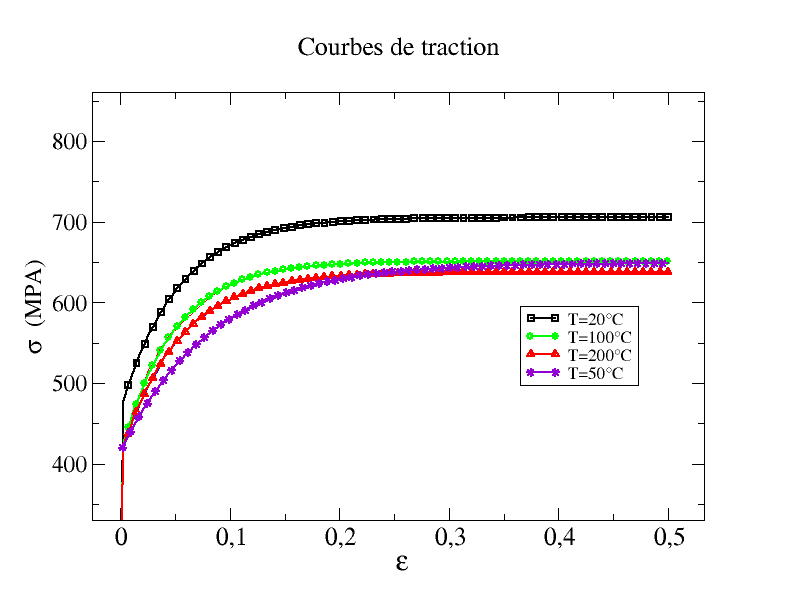
Figure 4.2-a *. Courbes de traction en fonction de la température – résultat à 50°*
Ceci provient du fait que les identification ont été faites indépendamment, sans vérifier la cohérence des résultats. Les variations de chaque coefficient avec la température sont énormes: par exemple
Température °C |
\(C\) |
\(b\) |
\(20\) |
\({C}_{1}\) |
\(\mathrm{\simeq }0\) |
\(\mathrm{\simeq }0\) |
\({b}_{2}\) |
|
\({C}_{3}\) |
\(\mathrm{\simeq }0\) |
Cet exemple est bien sûr extrême, mais il permet d’émettre une recommandation:
soit vérifierl’évolution monotone des paramètres matériau en fonction de la température, et recommencer l’identification pour les valeurs suspectes,
soit, si possible, mener l’identification en une fois pour toutes les températures.
Le domaine de validité#
Plusieurs vérifications sont possibles pour vérifier que la loi de comportement choisie, et les valeurs des paramètres utilisées, sont valides pour la simulation.
En sus des conseils données précédemment, pour bien choisir la loi de comportement en fonction de ce que l’on veut modéliser, certaines vérifications supplémentaires peuvent être effectuées à l’aide d’outils spécifiques.
Validité des paramètres dans la gamme de déformation et de vitesse.#
Les paramètres du modèle choisi étant identifiés dans une certaine gamme de déformation, il est important de vérifier que dans les études utilisant ces paramètres , ces déformations restent bien dans l” intervalle de l’identification.
Les courbes de traction définies par DEFI_FONCTION intègrent un «garde-fou»: la valeur maximum de l’abscisse ( EPSI ) ne peut être dépassée dans l’étude. Mais si jamais cela se produit, au lieu de définir un prolongement constant (ou pire: linéaire) il convient de reprendre l’identification pour définir des points supplémentaires dans la courbe de traction.
Les écrouissages linéaires ( ECRO_LINE ), ou définis par une fonction analytique ( ECRO_PUIS , VMIS_CINx*_CHAB , etc..) sont beaucoup plus dangereux. Rien n’empêchera dans les études de dépasser largement le niveau de déformation de l’identification. C’est pourquoi une protection devrait être mise en place dans une prochaine version.
De toutes façons , il est relativement aisé, en post-traitement d’une étude, de calculer ( CALC_CHAMP ) la norme du champ de déformations ( EPEQ_ELGA ) et d’en extraite le maximum ( POST_ELEM / MINMAX , ou post-traitement graphique dans SALOME_MECA ).
Si l’étude conduit à utiliser un formalisme de grandes déformations , il est nécessaire que l’identification l’utilise aussi.
En ce qui concerne la vitesse de déformation, là encore une vérification est nécessaire. Son calcul automatique devrait être proposé dans une prochaine version.
Décharge : validité de l’écrouissage isotrope (et des lois de Hencky)#
Comment vérifier que les décharges sont suffisamment petites pour que le calcul avec un écrouissage isotrope soit valide ? Il existe dans CALC_CHAMP un indicateur de décharge DERA_ELGA (cf. u4.81.04 Opérateur CALC_CHAMP u4.81.04 Opérateur CALC_CHAMP).
Les composantes DCHA_V, DCHA_T indiquent si il existe des décharges sur les contraintes (soit sur Von Mises, soit le tenseur total) , invalidant ainsi le calcul avec une loi élastique non linéaire .
La composante IND_DCHA fournit un indicateur qui indique si il y a un risque de rentrer en plasticité en décharge, invalidant ainsi le calcul à écrouissage isotrope.
Pour plus de précisions sur leur calcul, voir r4.20.01 Indicateurs de décharge et de perte de proportionnalité du chargement en élastoplasticité ).
Radialité : effets de non proportionnalité#
Dans le cas de chargements cycliques fortement non proportionnels, l’effet de sur-écrouissage peut être ignoré par le comportement choisi. En utilisant, dans CALC_CHAMP l’indicateur de décharge et de radialité du chargement: DERA_ELGA (cf. u4.81.04 Opérateur CALC_CHAMP), la composante ERR_RADI mesure l’erreur commise par la rotation de la normale à la surface de charge. Si cette valeur est importante, il faut alors utiliser un modèle permettant de prendre en compte cet effet (par exemple VISCOCHAB).
Références#
J.LEMAITRE, J.L.CHABOCHE, Mécanique des matériaux solides. Dunod 2ème édition 2004
J.L.CHABOCHE, «Cyclic viscoplastic constitutive equations», Journal of Applied Mechanics, Vol.60, Décembre 1993, pp. 813-828
J.L.CHABOCHE, “A review of some plasticity and viscoplasticity constitutive theories“, International Journal of Plasticity 24 (2008) 1642-1693
CURTIT. «Identification d’une loi de comportement de type Chaboche avec effet de mémoire d’´écrouissage pour l’acier 304L `a 20◦C et 300◦C». Note H-T26-2007-03264-FR, EDF R&D, Département Matériaux et Mécanique des Composants, 2007.
G.BLATMAN «Prise en compte de la variabilité des données expérimentales dans la démarche d’identification d’une loi de comportement mécanique de matériau» Note H-T24-2010-03168-FR, EDF R&D, Département Matériaux et Mécanique des Composants, 2011.