v6.08.106 SSND106 : Tractions rotations multiples en grandes déformations, écrouissage isotrope#
Résumé :
Ce test modélise un point matériel soumis à quatre cycles traction-rotation de corps rigide de \(45°\) , avec une loi de comportement élasto-plastique de Von Mises à écrouissage isotrope en grandes déformations (formulation avec déformation logarithmique GDEF_LOG). On vérifie d’une part l’invariance de la contrainte équivalente de Von Mises durant les phases de rotation, et d’autre part ses valeurs durant les tractions en comparant à la modélisation de SIMO_MIEHE.
Les modélisations \(A\) et \(B\) traitent le problème en déformations planes, soit en 3D (\(A\) ), soit en D_PLAN (\(B\) ).
Les modélisations \(C\) et \(D\) traitent le problème en contraintes planes, soit en 3D (\(C\) ), soit en C_PLAN (\(D\) ).
Résultats de référence#
Les résultats de référence sont obtenus en réalisant le même calcul avec le modèle de grandes déformations de Simo-Miehe (DEFORMATION = ‘SIMO-MIEHE’), validé par ailleurs.
Comportement VMIS_ISOT_LINE avec SIMO_MIEHE, en déformation plane :
Déplacement imposé |
Grandeur testée |
Référence \((\mathrm{MPa})\) |
\(500\mathrm{mm}\) |
SIEQ_ELGA |
1125 |
\(700\mathrm{mm}\) |
SIEQ_ELGA |
1411 |
\(900\mathrm{mm}\) |
SIEQ_ELGA |
1664 |
\(1100\mathrm{mm}\) |
SIEQ_ELGA |
1891.7 |
On compare les valeurs des contraintes équivalentes de von Mises à la fin des phases de traction et on vérifie leur invariance durant les phases de rotation.
Comportement VMIS_ISOT_LINE avec SIMO_MIEHE en contrainte plane
Déplacement imposé |
Grandeur testée |
Référence \((\mathit{MPa})\) |
\(500\mathit{mm}\) |
SIEQ_ELGA |
1019.57 |
\(500\mathit{mm}\) après rotation |
SIEQ_ELGA |
1019.57 |
\(700\mathit{mm}\) |
SIEQ_ELGA |
1271 |
On vérifie enfin la qualité de la matrice tangente par comparaison avec une matrice tangente obtenue par perturbation. On obtient avec SIMO_MIEHE, une différence quasi nulle (norme de la différence : de l’ordre de \(1.E-20\) ). On vérifiera donc la différence obtenue sur la matrice tangente pour les formalismes de grandes déformations testés ici.
Modélisation A#
Caractéristique de la modélisation#
La modélisation est 3D.
Caractéristiques du maillage#
Le maillage est constitué d’une maille hexaédrique linéaire (à 8 nœuds).
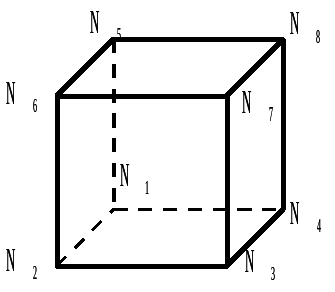
Figure 2 : Maillage de la modélisation \(A\)
Grandeurs testées et résultats#
Comportement VMIS_ISOT_LINE avec GDEF_LOG
Déplacement imposé |
Grandeur testée |
Référence \((\mathrm{MPa})\) |
Tolérance (%) |
\(500\mathrm{mm}\) |
SIEQ_ELGA |
1125 |
0,2 |
\(700\mathrm{mm}\) |
SIEQ_ELGA |
1411 |
0,2 |
\(900\mathrm{mm}\) |
SIEQ_ELGA |
1664 |
0,2 |
\(1100\mathrm{mm}\) |
SIEQ_ELGA |
1891.7 |
0,2 |
Modélisation B#
Caractéristique de la modélisation#
La modélisation utilisée est bidimensionnelle. On utilise les éléments D_PLAN
Caractéristiques du maillage#
Le maillage est constitué d’une maille quadrangulaire linéaire (à 4 nœuds).
Figure 3 : Maillage de la modélisation \(B\)
Grandeurs testées et résultats#
Comportement VMIS_ISOT_LINE avec GDEF_LOG
Déplacement imposé |
Grandeur testée |
Référence \((\mathrm{MPa})\) |
Tolérance (%) |
\(\mathrm{500mm}\) |
SIEQ_ELGA |
1125 |
0,2 |
\(\mathrm{700mm}\) |
SIEQ_ELGA |
1411 |
0,2 |
\(\mathrm{900mm}\) |
SIEQ_ELGA |
1664 |
0,2 |
\(\mathrm{1100mm}\) |
SIEQ_ELGA |
1891.7 |
0,2 |
Modélisation C#
Caractéristique de la modélisation#
La modélisation est 3D, et simule un état de contrainte plane. On considère ici seulement une traction, une rotation et une nouvelle traction.
Caractéristiques du maillage#
Le maillage est constitué d’une maille hexaédrique linéaire (à 8 nœuds).
Figure 4 : Maillage identique à celui de la modélisation \(A\)
Grandeurs testées et résultats#
Comportement VMIS_ISOT_LINE avec GDEF_LOG
Déplacement imposé |
Grandeur testée |
Référence \((\mathit{MPa})\) |
Tolérance (%) |
\(500\mathit{mm}\) |
SIEQ_ELGA |
1019.57 |
2 |
\(500\mathit{mm}\) après rotation |
SIEQ_ELGA |
1019.57 |
2 |
\(700\mathit{mm}\) |
SIEQ_ELGA |
1271 |
2 |
Modélisation D#
Caractéristique de la modélisation#
La modélisation utilisée est bidimensionnelle en contrainte plane (C_PLAN). Le but de cette modélisation est de valider l’algorithme de grandes déformations GDEF_LOG en C_PLAN. On compare donc les résultats avec ceux obtenus par GDEF_LOG dans la modélisation \(C\) , qui traite en 3D un problème équivalent.
Caractéristiques du maillage#
Le maillage est constitué d’une maille quadrangulaire linéaire (à 4 nœuds).
Figure 5 : Maillage identique à celui de la modélisation \(B\)
Grandeurs testées et résultats#
Comportement VMIS_ISOT_LINE avec GDEF_LOG
Déplacement imposé |
Grandeur testée |
Référence \((\mathit{MPa})\) |
Tolérance (%) |
\(500\mathit{mm}\) |
SIEQ_ELGA |
1006.9 |
0,1 |
\(500\mathit{mm}\) après rotation |
SIEQ_ELGA |
1006.9 |
0,1 |
\(700\mathit{mm}\) |
SIEQ_ELGA |
1256.1 |
0,1 |
Synthèse des résultats#
Les résultats obtenus sont satisfaisants, aussi bien en \(\mathrm{3D}\) qu’en \(\mathrm{2D}\) . On constate un écart maximum inférieur à \(0,2\text{\%}\) entre SIMO_MIEHE (pris comme référence) et le formalisme GDEF_LOG.
Ce test valide également le bon fonctionnement de GDEF_LOG en contraintes planes.
De plus, pour toutes les modélisations, la contrainte équivalente reste constante durant les phases de rotations.