On présente l’algorithme de calcul des densités de ferraillage des éléments en béton armé, tel qu’implanté au sein de la commande [CALC_FERRAILLAGE].
On présentera pour ce fait, en un premier temps, l’algorithme de calcul des éléments linéiques 1D, pour ensuite examiner celui des éléments surfaciques 2D de type plaque.
La détermination des ferraillages d’une section est effectuée, selon l’option choisie à l’Eurocode 2 partie 1-1 [bib2] (CODIFICATION='EC2') ou au BAEL91-99 (CODIFICATION='BAEL').
Le calcul du ferraillage des plaques peut se faire suivant deux méthodes distinctes: la méthode de Capra-Maury (qui est une généralisation du calcul 1D à un nombre fini \(N\) de facettes fictives) ou la méthode Sandwich (conformément à l’Annexe LL de l’EN-1992-2).
Le principe de la méthode de Capra-Maury consiste à assimiler l’étude d’une plaque à un problème équivalent de ferraillage de poutres, et ce en considérant par le biais de coupures, l’équilibre successif des différentes facettes obtenues – chaque facette étant sollicitée par un torseur d’efforts réduits 1D et ferraillé par conséquent suivant la théorie des poutres.
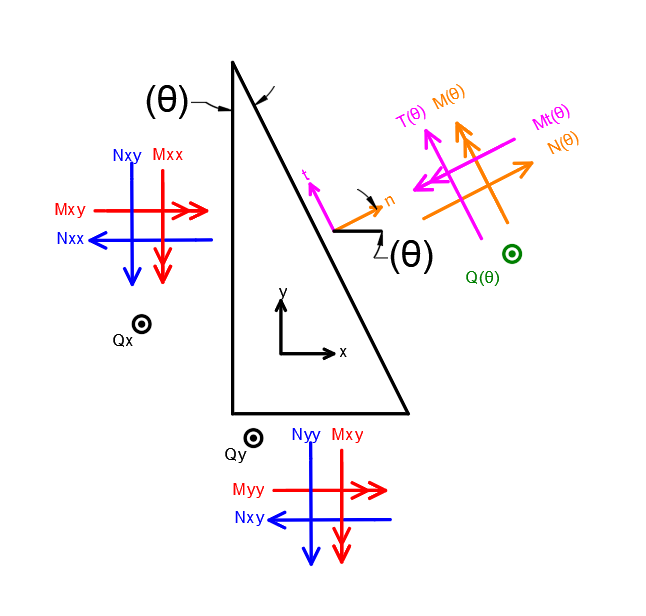
En ce sens, chaque facette est définie par son vecteur normal \(\vector{n}( \theta)\) faisant un angle \(\theta\) avec l’axe local \(x\) de la plaque, et elle est soumise aux efforts obtenus en écrivant l’équilibre du prisme conséquent et illustré dans la figure ci-dessous.
Fig. 444 Équilibre de coin et passage des efforts 2D aux efforts 1D#
\(N\left( \theta \right)\) et \(M\left( \theta \right)\) sollicitent la poutre fictive en flexion composée (FC)
\(T \left( \theta \right)\) et \({M}_{t}\left( \theta \right)\) sollicitent la poutre fictive en Cisaillement membranaire (CISA)
\(Q\left( \theta \right)\) sollicite la poutre fictive en cisaillement hors-plan (CISHP)
Telle qu’elle est utilisée dans sa version courante, la méthode de Capra Maury classique couvrirait uniquement la vérification de l’effort normal \(N\left( \theta \right)\) et du moment de flexion \(M\left( \theta \right)\) comme efforts membranaires. Les sollicitations \(T\left( \theta \right)\) et \({M}_{t}\left( \theta \right)\) sont négligés.
En ce sens, pour \(\theta\) allant de 0 à 360°, on se ramènerait au dimensionnement d’une poutre fictive en flexion composée, telle qu’on déterminera les sections d’acier supérieure \({A}_{s, \text{sup}}\left( \theta \right)\) et inférieure \({A}_{s, \text{inf}}\left( \theta \right)\) requises pour l’équilibre, conformément aux principes de dimensionnement des poutres tels qu’explicités précédemment.
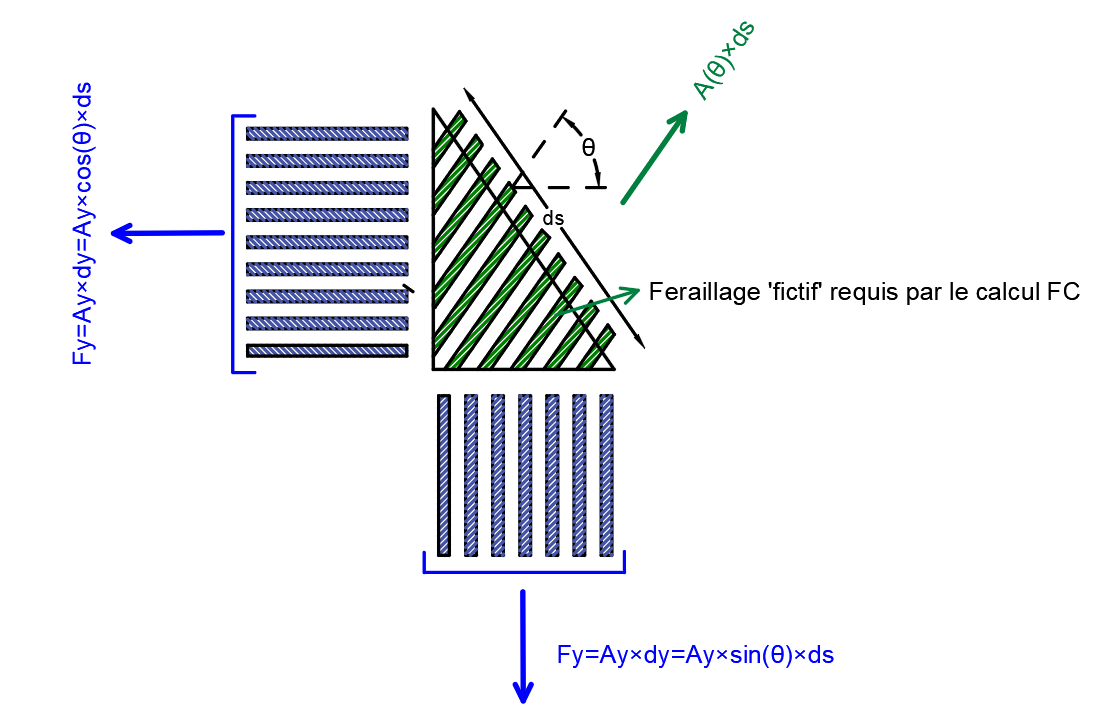
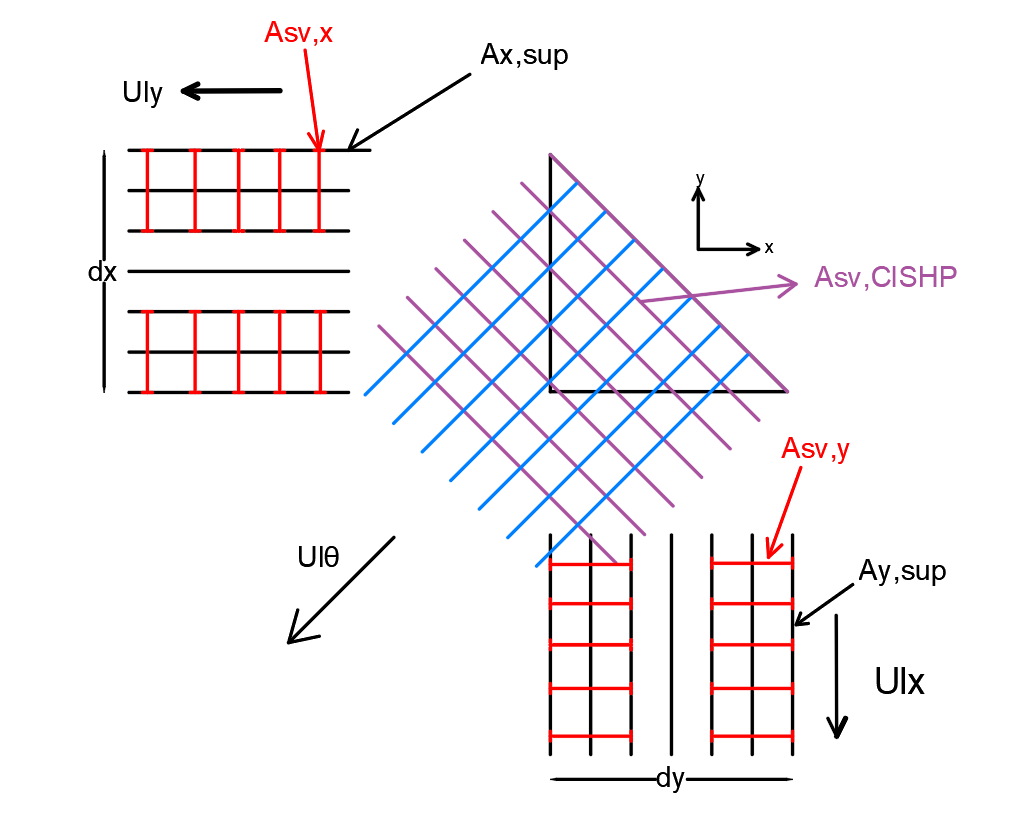
Ce ferraillage est «fictif» et il est ressenti par la projection des lits de ferraillage réellement disposés dans la plaque, à savoir la projection des sections d’acier suivant les axes \(x\) et \(y\) respectivement, et suivant la face supérieure et inférieure de la dalle.
Fig. 445 Projection des lits de ferraillage et constitution du ferraillage fictif par facette considérée#
Ainsi, en se rapportant au ferraillage réel de la dalle/voile à savoir le quadruplet \(\left({A}_{s_x,s},{A}_{s_y,s},{A}_{s_x,i},{A}_{s_y,i}\text{ en } cm^{2} ml^{-1} \right)\) (\(ml\) pour mètre linéaire) on devra vérifier, conformément à la figure précédente, les deux inéquations ci-dessous:
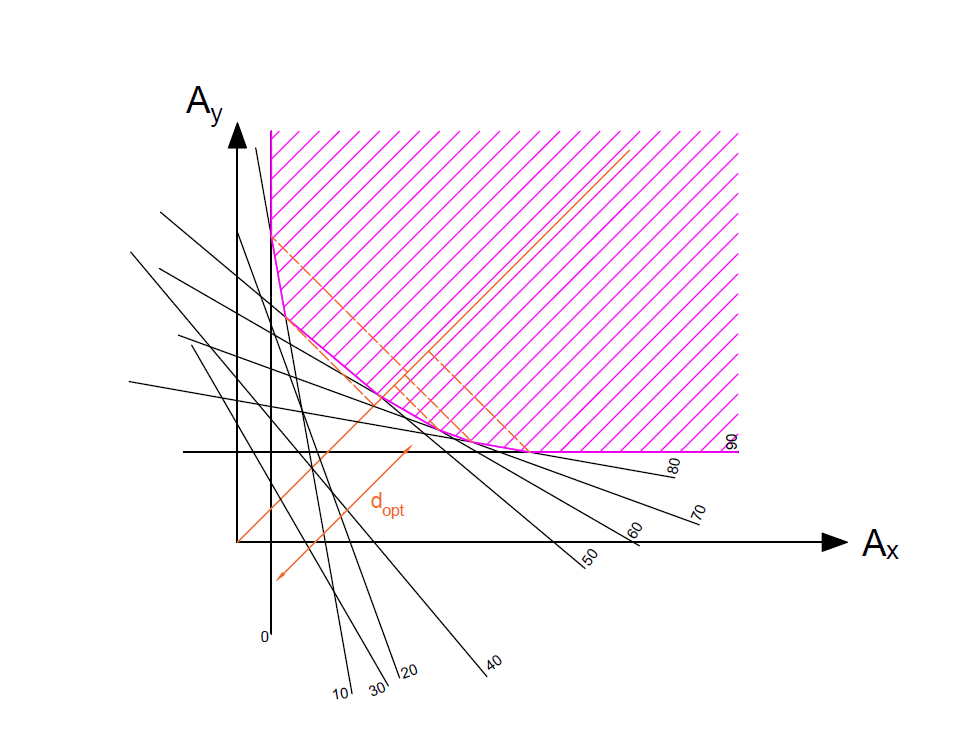
On se limite dans ce qui suit, à une seule face de la section (inférieure ou supérieure), telle qu’on cherche à minimiser la somme \({A}_{s_x}+{A}_{s_y}\) tout en vérifiant à ce que les deux termes restent bien évidemment positifs. Pour cela, on passe par un raisonnement graphique et on trace dans le repère orthonormé \(\left( A_{s_x}, A_{s_y} \right)\), pour chaque angle \(\theta\) considéré, la droite d’équation:
L’ensemble des droites ainsi tracées, délimiterait un domaine de validation construit par le biais des intersections de ces droites, et garantissant le respect des inéquations données précédemment pour chaque valeur de \(\theta\) considérée – à noter bien entendu, qu’on aurait deux ensembles de droites distincts: un pour l’équilibre en nappe supérieure et un autre pour l’équilibre en nappe inférieure.
Sachant que pour une droite donnée, son domaine de validité est la partie du repère situé au-dessus de la droite, l’ensemble des droites tracées constituerait par conséquent un polygone convexe «ouvert» vers le haut, dont les sommets ne sont autres que les intersections des différentes droites (\(d_{\theta}\)). Ces derniers points sont ainsi par conséquent, des couples de ferraillage \((Ax; Ay)_i\) solutions à l’équilibre global de la nappe supérieure/inférieure. En particulier, en vue de la convexité du domaine de validation construit, ces points conduiraient au ferraillage minimum (c’est-à-dire aux solutions donnant les plus petites sommes \(Ax+Ay\) ) de l’ensemble du domaine de validité, et on retiendra finalement le point permettant de minimiser la distance \(d\) entre sa projection orthogonale sur la première bissectrice du plan et l’origine du repère (voir figure ci-dessous).
Fig. 446 Construction du domaine de validation par nappe (supérieure et inférieure)#
Concrètement dans l’algorithme, on défini un ensemble discret de facettes centrées au point de calcul, dont la normale tourne dans le plan tangent au feuillet moyen. L’angle \(\theta ` des facettes est discrétisé régulièrement de :math:\)-90°` à \(+90°\) , compte tenu de la symétrie des inéquations d’équilibre.
Prise en compte du cisaillement hors-plan (CISHP)#
Il s’agit dans cette partie de la reprise des efforts de cisaillement transverse des facettes, à savoir \(Q\left( \theta \right)\) avec:
La reprise de \(Q\left( \theta \right)\) par chacune des poutres fictives correspond à une étude classique d’effort tranchant transversal d’une poutre (§6.2 de l’EN-1992-1).
Suivant les clauses et formules développées dans ce paragraphe de l’Eurocode 2, on calculera un ferraillage transversal \({A}_{\text{sv},\text{CISHP}}( \theta)\) (dans le cas où \(Q\left( \theta \right) \gt {V}_{\text{Rd},c,z}( \theta)\) ), en considérant:
La hauteur de la poutre \(h=e\) avec \(e\) l’épaisseur de la plaque
La largeur de la poutre \(b=1~m\)
La hauteur utile de calcul \(d\)
\[\begin{split}d
=
\left \lbrace \begin{array}{c}
h-{c}_{\text{inf}}\text{ si }M\left( \theta \right)>0\\
h-{c}_{\text{sup}}\text{ si }M\left( \theta \right) \lt 0
\end{array} \right .\end{split}\]
\({A}_{s,\text{comp}}\) désigne la section d’acier comprimé si elle est requise par le calcul en flexion composée
\({\stressCmp}_{{A}_{s,\text{comp}}}\) désigne la contrainte ressentie au droit de l’acier comprimé tel que donné par le calcul en flexion composée et en fonction du diagramme de déformation associé
\({z}_{1} = \left \lbrace \begin{array}{c} d-{c}_{\text{sup}}\text{ si }M\left( \theta \right)>0\\ d-{c}_{\text{inf}}\text{ si }M\left( \theta \right) \lt 0\end{array}\) désigne le bras de levier de l’acier de compression par rapport au centre de gravité de l’acier de traction (ferraillage principal)
\({F}_{\text{cc}}\) : désigne l’effort total repris par le béton comprimé tel que donné par le calcul en flexion composée et en fonction du diagramme de déformation associé
\({z}_{2}\) : désigne le bras de levier de l’effort \({F}_{\text{cc}}\) par rapport au centre de gravité de l’acier de traction (ferraillage principal)
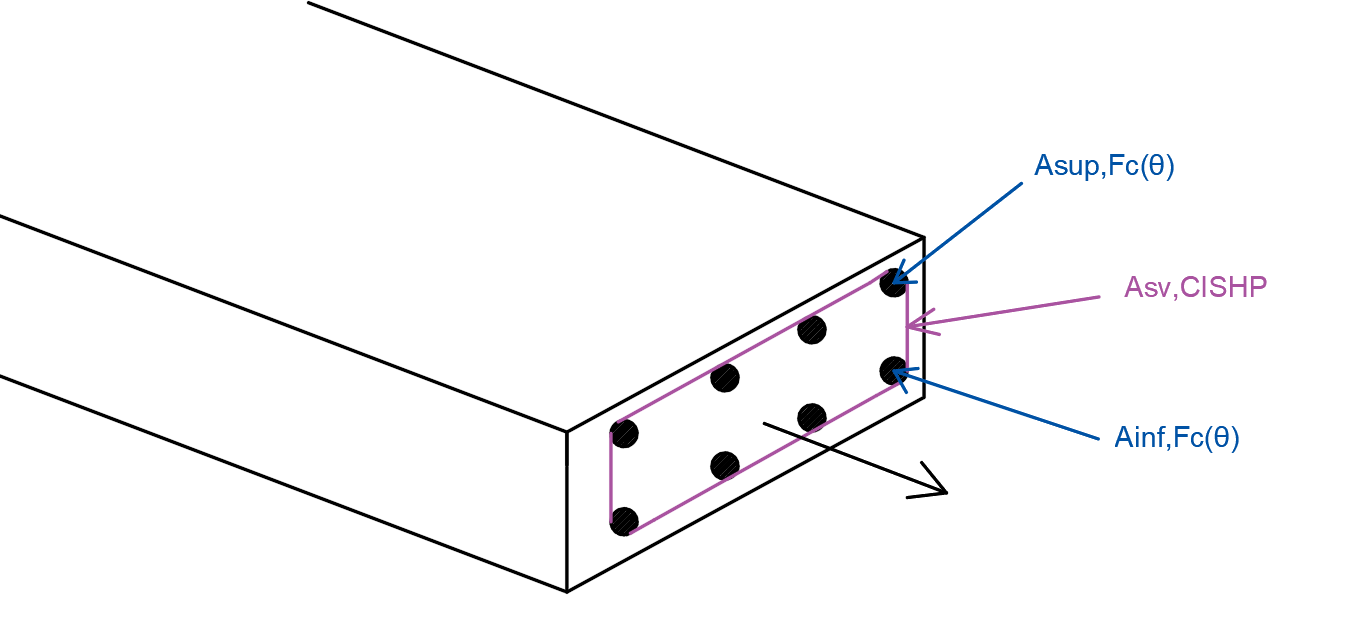
Fig. 447 Calcul du ferraillage transversal pour la reprise du cisaillement hors-plan (CISHP)#
De là, on se rapporte au ferraillage transversal réel de la dalle/voile (à savoir le couple de ferraillage \(\left({A}_{\text{sv}, x};{A}_{\text{sv}, y}\right)\) exprimé en cm2/m/m).
Fig. 448 Équilibre global et calcul du ferraillage au cisaillement hors-plan#
Ainsi, suivant un raisonnement similaire à celui adopté pour la détermination du ferraillage de membrane, il s’agira de vérifier pour chaque orientation de facette considérée l’inéquation ci-dessous:
La méthode Sandwich – initiée dans la littérature par Gupta et Marti et dont le principe a été introduit ( mais de façon incomplète et peu détaillée ) au niveau de l’Annexe LL de l’EN-1992-2 en 2004 – est une méthode qui permet de valoriser le caractère 2D d’un élément de plaque, en prenant en compte la rigidité bidirectionnelle de l’élément ainsi que la cinématique de plaque (ce dernier point étant appuyé par l’étape supplémentaire de la remontée d’échelle qu’on introduira ultérieurement dans la note).
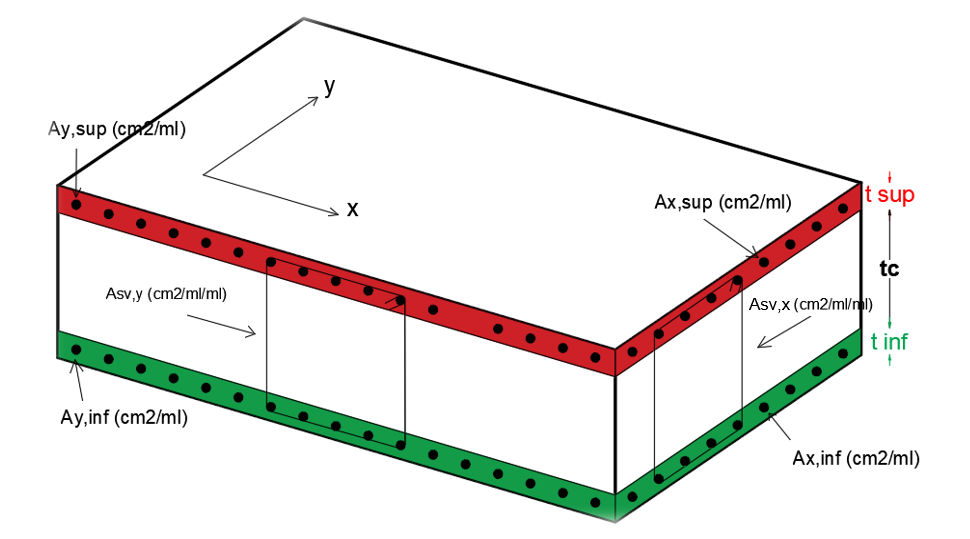
Cette méthode divise la plaque en trois couches (d’où son nom):
Les couches supérieure et inférieure (d’épaisseurs respectives \(t_{\text{sup}}\) et \(t_{\text{inf}}\) ) résistent aux sollicitations membranaires (efforts normaux, moment de flexion, cisaillement membranaire et torsion). Elles reprennent donc les efforts \({N}_{xx}\), \({N}_{yy}\) et \({N}_{xy}\) ainsi que les efforts \({M}_{xx}\), \({M}_{yy}\) et \({M}_{xy}\).
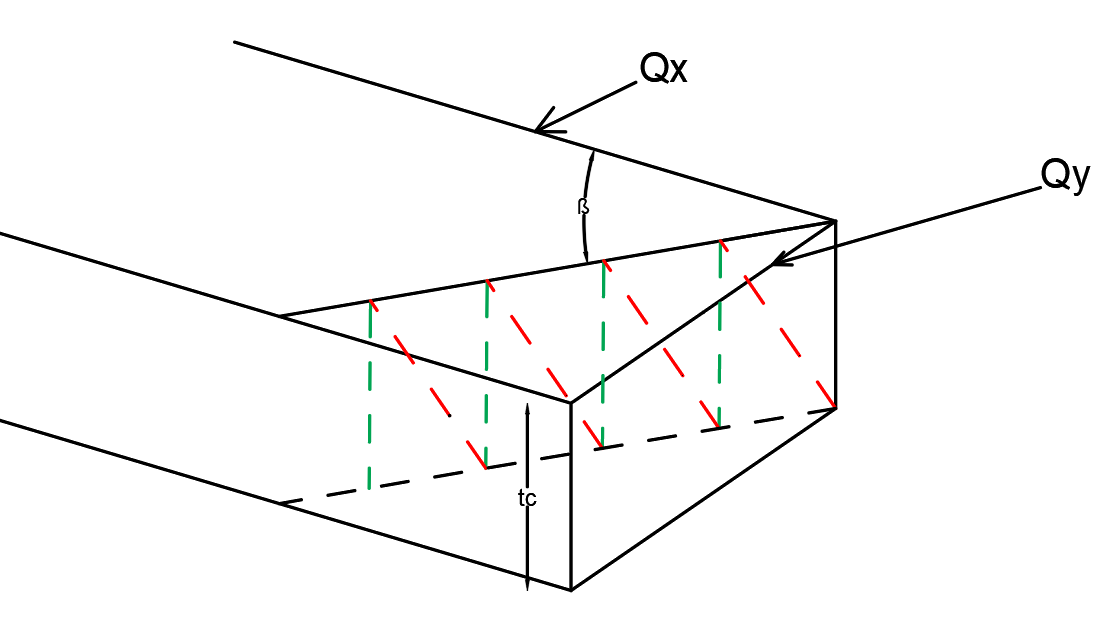
La couche intermédiaire où le noyau de béton (d’épaisseur \(t_{c}\) ) résiste au cisaillement hors plan. Elle reprend donc les efforts \({Q}_{x}\) et \({Q}_{y}\) .
Fig. 449 Présentation du modèle « Sandwich » (division de la plaque en trois couches)#
Ainsi, la première étape de la méthode est de déterminer, par le biais d’un calcul itératif, les épaisseurs optimales des deux couches périphériques et d’en déduire alors par le biais des équations de l’équilibre membranaire, le ferraillage de membrane (à savoir le quadruplet \(\left( {A}_{\text{x,\text{sup}}},{A}_{\text{y,\text{sup}}},{A}_{\text{x,\text{inf}}},{A}_{\text{y,\text{inf}}}\right)\) en \(cm^2.ml\)). Dans une seconde étape, l’épaisseur de la couche intermédiaire pourra être déduite (\(t_c = h–t_{\text{sup}}–t_{\text{inf}}\)) et le ferraillage transversal (à savoir le couple \(\left( {A}_{\text{sv},x},{A}_{\text{sv},y}\right)\) en \(cm^2.ml.ml\)) sera calculé suivant les règles classiques de dimensionnement à l’effort tranchant des poutres telles qu’élaborées dans le §6.2 de l’EN-1992-1.
On commence par calculer les efforts ‘ressentis’ aux centres de gravité des nappes d’armatures supérieure (\(\text{sup}\)) et inférieure (\(\text{inf}\)).
Ainsi, conformément aux notations qui suivent, on aura:
Fig. 450 Répartition des efforts membranaires entre les nappes supérieure et inférieure#
Tels qu’on ait:
L’excentricité de la nappe supérieure \({y}_{\text{sup}}=h/2-{c}_{\text{sup}}\)
L’excentricité de la nappe inférieure \({y}_{\text{inf}}=h/2-{c}_{\text{inf}}\)
Le bras de levier interne des efforts \(z={y}_{\text{sup}}+{y}_{\text{inf}}\)
Les efforts \({D}_{\text{nxx}}\), \({D}_{\text{nyy}}\) et \({D}_{\text{nxy}}\) sont les efforts de traction dus au treillis de Ritter-Morsch pour la reprise du cisaillement transverse dans la couche intermédiaire (au début de l’algorithme, ces efforts sont nuls, puis on itérera).
On évalue alors l’état de chaque nappe d’acier (on donne à titre indicatif le raisonnement pour la nappe supérieure):
Si \({N}_{xx, \text{sup}} \ge - \left\vert{N}_{xy, \text{sup}}\right\vert\) et \({N}_{yy, \text{sup}}\ge -\left\vert{N}_{xy, \text{sup}}\right\vert\), alors on note CAS_SUP=1
Sinon, si \({N}_{xx, \text{sup}} \lt -\left\vert{N}_{xy, \text{sup}}\right\vert\) et \({N}_{yy, \text{sup}} \gt {N}_{xy, \text{sup}}^{2}/{N}_{xx, \text{sup}}\), alors on note CAS_SUP=2
Sinon, si \({N}_{xx, \text{sup}} \lt -\left\vert{N}_{xy, \text{sup}}\right\vert\) et \({N}_{yy, \text{sup}} \le {N}_{xy, \text{sup}}^{2}/{N}_{xx, \text{sup}}\), alors on note CAS_SUP=3
Sinon, si \({N}_{yy, \text{sup}} \lt -\left\vert{N}_{xy, \text{sup}}\right\vert\) et \({N}_{xx, \text{sup}} \gt {N}_{xy, \text{sup}}^{2}/{N}_{yy, \text{sup}}\), alors on note CAS_SUP=3
Sinon, si \({N}_{yy, \text{sup}} \lt -\left\vert{N}_{xy, \text{sup}}\right\vert\) et \({N}_{xx, \text{sup}} \le {N}_{xy, \text{sup}}^{2}/{N}_{yy, \text{sup}}\), alors on note CAS_SUP=4
Sinon, alors on note CAS_SUP=4
En ce sens, on aura les cas de figure suivants:
Pour CAS_SUP=1, alors un ferraillage de traction est requis suivant les directions \(x\) et \(y\) de la nappe supérieure
Pour CAS_SUP=2, alors un ferraillage de traction est requis suivant la direction \(y\) seulement de la nappe supérieure
Pour CAS_SUP=3, alors un ferraillage de traction est requis suivant la direction \(x\) seulement de la nappe supérieure
Pour CAS_SUP=4, alors pas de ferraillage de traction requis pour la nappe supérieure
De là, en fonction des valeurs prises par CAS_SUP et par CAS_INF, l’algorithme de la méthode est structuré suivant les quatre volets principaux décrits ci-dessous:
Si CAS_SUP≠4 et CAS_INF≠4, alors CAS_SAND=1
Sinon, si CAS_SUP≠4 et CAS_INF=4, alors CAS_SAND=2
Sinon, si CAS_SUP=4 et CAS_INF≠4, alors CAS_SAND=3
Sinon CAS_SAND=4
Tels que:
Si CAS_SAND=1, alors un ferraillage de traction est requis en nappes supérieure et inférieure
Si CAS_SAND=2, alors un ferraillage de traction est requis en nappe supérieure seulement (la couche d’épaisseur \(t_{\text{inf}}\) étant régie par un état de compression bi-axiale)
Si CAS_SAND=3, alors un ferraillage de traction est requis en nappe inférieure seulement (la couche d’épaisseur \(t_{\text{sup}}\) étant régie par un état de compression bi-axiale)
Si CAS_SAND=4, alors pas de ferraillage de traction requis (plaque entièrement comprimée)
L’idée étant alors d’écrire l’équilibre membranaire suivant le cas en question et de déterminer les épaisseurs des deux couches supérieure et inférieure, ainsi que le ferraillage principal de membrane de la plaque.
Dans le cas CAS_SAND=1, chaque couche périphérique (supérieure et inférieure) sera caractérisée par:
Son épaisseur \(t_{\text{sup}}\) ou \(t_{\text{inf}}\)
Deux efforts positifs (traction) résistants d’acier (suivant \(x\)\({n}_{\text{sx}}\) et suivant \(y\)\({n}_{\text{sy}}\))
Un effort négatif (compression) résistant repris par une bielle de compression (\({n}_{c}\)) dont la direction est à déterminer (angle \(\theta\) formé avec l’axe \(y\)); en effet, le ferraillage de traction étant requis, on aurait au moins une contrainte principale de traction au niveau de chaque couche (et donc au plus, une seule bielle de compression par couche).
Les équations d’équilibre global membranaire s’écrivent alors comme suit:
Fig. 451 Configuration de la dalle (efforts d’acier et orientation des bielles de béton)#
On aurait ainsi, dans ce premier cas de figure six équations pour huit inconnues (\(\theta_{\text{sup}}\), \(\theta_{\text{inf}}\), \(t_{\text{sup}}\), \(t_{\text{inf}}\), \({A}_{s_x, \text{sup}}\), \({A}_{s_y, \text{sup}}\), \({A}_{s_x, \text{inf}}\) et \({A}_{s_y, \text{inf}}\))
En particulier, la résistance des bielles de compression est déterminée conformément aux clauses du §6.109 - Éléments de membrane de l’EN-1992-2 (cas d’une plaque partiellement comprimée):
On considère pour le moment que les armatures ainsi que les bielles de compression travaillent simultanément à leurs états limites ultimes. En réalité, il faudra incorporer dans le problème la recherche du champ de déformations (de façon similaire à la règle des trois pivots pour les poutres en flexion composée) dont on déduira, en fonction des lois de comportement des matériaux, le matériau (béton comprimé ou acier tendu) qui travaille à son état limite ultime et dictant par conséquent la forme du diagramme des déformations et par conséquent les contraintes réellement ressenties.
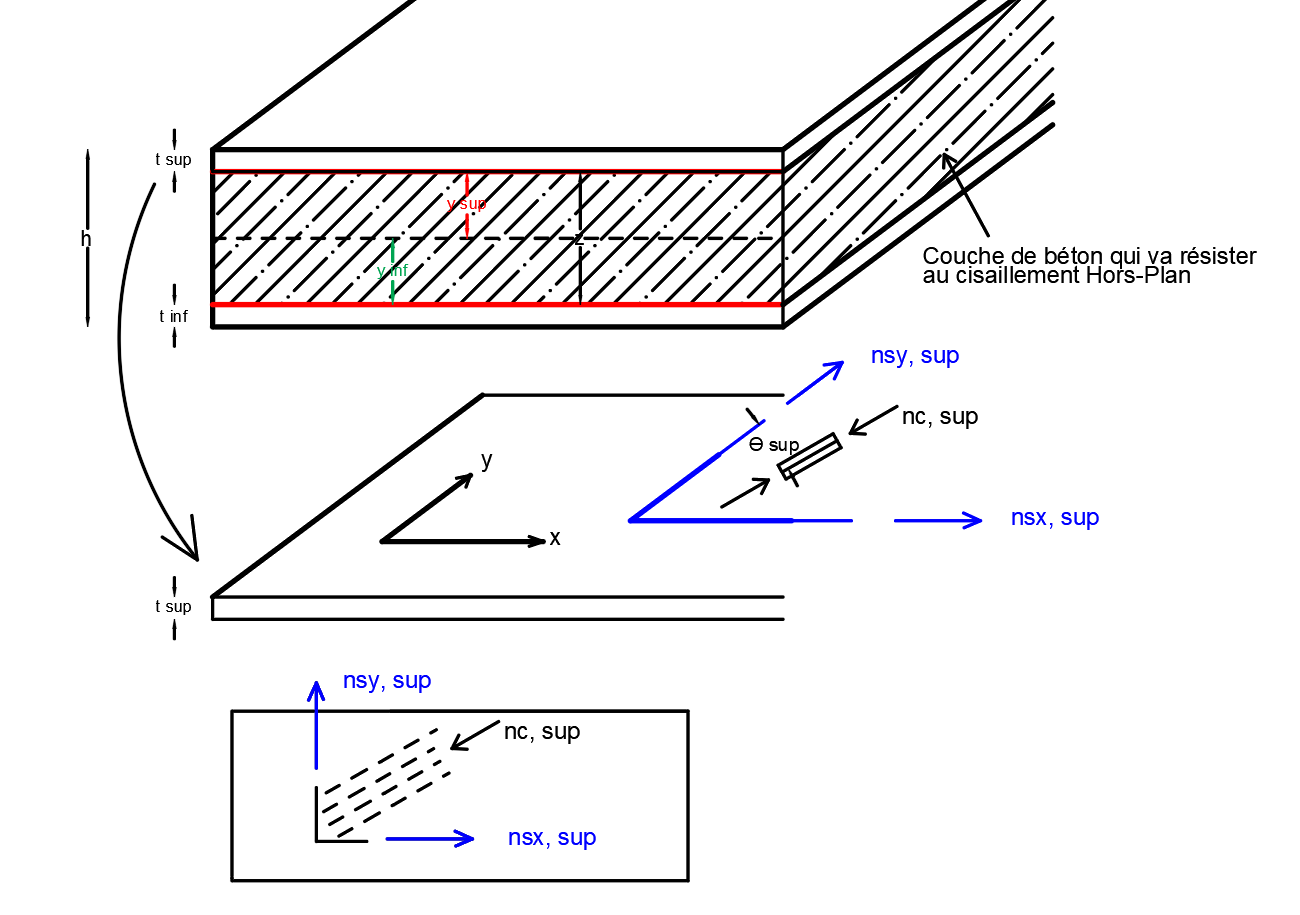
Dans le cas CAS_SAND=2, seule la couche supérieure requiert un ferraillage positif de traction; la couche inférieure étant régie par un champ de compression bi-axial, aucun ferraillage n’est requis (on suppose pour ce fait pour le moment que les contraintes de compression restent relativement faibles vis-à-vis de la capacité ultime du béton, et que par conséquent un ferraillage négatif de compression n’est pas envisagé). Ainsi:
La couche supérieure sera toujours caractérisée par son épaisseur \(t_{\text{sup}}\), l’inclinaison de sa bielle de compression \(\theta_{\text{sup}}\) et l’effort résistant qu’elle reprend (\(n_{c, \text{sup}}=-t_{\text{sup}} \, {f_{c, \text{sup}}}\)), ainsi que les efforts de ferraillage \({n}_{s_x, \text{sup}}\) et \({n}_{s_y, \text{sup}}\), positifs (traction).
La couche inférieure sera caractérisée par son épaisseur \(t_{\text{inf}}\) et par le champ de contraintes sollicitant le béton compris dans le repère \((x,y)\), à savoir:
Ces efforts sont négatifs vu qu’il s’agit d’un état de compression, le repère \((x,y)\) n’étant pas nécessairement le repère principal du champ de contraintes dans la couche inférieure (il le sera si et seulement si \({n}_{c_{xy}, \text{inf}}=0\) ). Les contraintes principales pouvant être déduites en diagonalisant la matrice.
L’équilibre membranaire du système s’écrit désormais comme suit:
De plus, conformément aux explications qui précèdent, on obtient, en diagonalisant la matrice des efforts dans la couche inférieure, l’effort principal de compression majeur ci-dessous:
Et on aurait désormais sept équations pour huit inconnues (\(\theta_{\text{sup}}\), \(t_{\text{sup}}\), \(t_{\text{inf}}\), \({A}_{s_x, \text{sup}}\), \({A}_{s_y, \text{sup}}\) , \(n_{c_{x},\text{inf}}\) , \(n_{c_{y},\text{inf}\) et \(n_{c_{xy},\text{inf}}\) )
En particulier, la résistance des bielles de compression est déterminée conformément aux clauses du §6.109 - Éléments de membrane de l’EN-1992-2, pour le cas d’une plaque partiellement comprimée:
Le cas CAS_SAND=3 est symétrique au cas précédent. Dans ce cas, seule la couche inférieure requiert un ferraillage positif de traction; la couche supérieure étant régie par un champ de compression bi-axial, aucun ferraillage n’est requis.
Dans le cas CAS_SAND=4, aucune couche ne requiert un ferraillage positif de traction; les deux couches supérieure et inférieure étant régies par des champs de compression bi-axiaux. Les équations de l’équilibre membranaire s’écrivent alors comme suit:
Par ailleurs, on obtient en diagonalisant les matrices des efforts en couches supérieure et inférieure, les efforts principaux majeurs de compression respectifs ci-dessous:
et on aurait désormais huit équations pour huit inconnues (\(t_{\text{sup}}\), \(t_{\text{inf}}\), \(n_{c_x, \text{sup}}\), \(n_{c_y, \text{sup}}\), \(n_{c_{xy}, \text{sup}}\), \(n_{c_x, \text{inf}}\), \(n_{c_y, \text{inf}}\) et \(n_{c_{xy}, \text{inf}}\)).
En particulier, la résistance des bielles de compression est déterminée conformément aux clauses du §6.109 - Éléments de membrane de l’EN-1992-2, pour le cas d’une plaque entièrement comprimée:
Considération du ferraillage négatif de compression#
D’un point de vue numérique, un tel cas se rencontre lorsque, avec les macros introduites précédemment (CAS_SAND), on obtient l’un des cas de figure ci-dessous:
Si dans la boucle CAS_SAND=1 (ferraillage de traction requis en supérieure et inférieure), on a l’un des termes calculés \({n}_{xy, \text{sup}}\), \({n}_{s_y, \text{sup}}\), \({n}_{xy, \text{inf}}\) ou \({n}_{s_y, \text{inf}}\) qui est négatif, alors on ne change rien dans ce cas vu que les équations d’équilibre sont toujours les mêmes. Les efforts aux valeurs négatives indiquent qu’il s’agit d’un ferraillage de compression suivant la nappe et la direction considérées.
De même, si dans la boucle CAS_SAND=2 (ferraillage de traction requis en supérieure), l’algorithme aboutit à une solution du problème avec au plus l’un des efforts d’acier négatif en supérieure. Il n’y a rien à changer, les efforts aux valeurs négatives indiquent qu’il s’agit d’un ferraillage de compression suivant la nappe et la direction considérées. Cependant, si l’équilibre ne peut pas aboutir ( c’est-à-dire qu’il y a incapacité à déterminer les inconnues du problème, dont notamment les épaisseurs des deux couches supérieure et inférieure), alors on introduit un nouveau cas de figure qu’on désignera CAS_SAND=2bis.
Même constat pour la boucle CAS_SAND=3 (et introduction éventuelle du cas de figure CAS_SAND=3bis).
Si dans la boucle CAS_SAND=4 l’équilibre ne peut pas aboutir (c’est-à-dire qu’il y a incapacité à déterminer les inconnues du problème, dont notamment les épaisseurs des deux couches supérieure et inférieure), alors on introduit un nouveau cas de figure qu’on désignera CAS_SAND=4bis.
On présente donc dans ce qui suit, l’approche analytique des trois cas supplémentaires développés pour couvrir convenablement, et de façon appropriée au cas dont il dérive, le ferraillage de compression.
Dans ce nouveau cas, on aurait désormais simultanément, dans la couche inférieure:
Deux lits d’acier suivant \(x\) et \(y\), reprenant les efforts \({n}_{s_x, \text{inf}}\) et \({n}_{s_y, \text{inf}}\) respectivement (le calcul devra donner des valeurs négatives à ces efforts, s’agissant d’armatures de compression ).
Deux bielles de compression principales, à savoir \({n}_{c, \text{inf}, \text{max}}\) et \({n}_{c,\text{inf}, \text{min}}\) (ces efforts sont négatifs également). Afin de simplifier le processus et alléger les notations, on considérera comme inconnues du problème, la contrainte maximale en posant \({n}_{c, \text{inf}}={n}_{c, \text{inf}, \text{max}}\) et son orientation dans le repère (x,y) donnée par l’angle \({\theta}_{\text{inf}}\) que fait sa direction avec l’axe \(y\) (l’orientation de \({n}_{c, \text{inf}, \text{min}}\) est donnée par \(\frac{\pi}{2}+{\theta}_{\text{inf}}\) ), ainsi que le rapport des deux contraintes principales à savoir \({\alpha}_{\text{inf}}=\frac{{n}_{c, \text{inf}, \text{min}}}{{n}_{c, \text{inf}, \text{max}}}\) .
L’écriture des équations de l’équilibre membranaire aboutit alors dans ce nouveau cas à:
De plus, compte tenu des clauses du §6.109 de l’EN-1992-2, on aurait en plus les relations ci-dessous. Dans le cas d’une plaque partiellement comprimée
Et on aurait au final sept équations pour neuf inconnues (\(t_{\text{sup}}\), \(t_{\text{inf}}\), \(\theta_{\text{sup}}\), \(\theta_{\text{inf}}\), \(\alpha{\text{inf}}\), \({A}_{s_x, \text{sup}}\), \({A}_{s_y, \text{sup}}\), \({A}_{s_x, \text{inf}}\) et \({A}_{s_y, \text{inf}}\)).
Dans ce nouveau cas, on aurait alors simultanément, dans la couche supérieure:
Deux lits d’acier suivant \(x\) et \(y\), reprenant les efforts \({n}_{xy, \text{sup}}\) et \({n}_{s_y, \text{sup}}\) respectivement (le calcul devra donner des valeurs négatives à ces efforts, s’agissant d’armatures de compression ).
Deux bielles de compression principales, à savoir \({n}_{c, \text{sup}, \text{max}}\) et \({n}_{c, \text{sup}, \text{min}}\) (ces efforts sont négatifs également). Afin de simplifier le processus et alléger les notations, on considérera comme inconnues du problème, la contrainte maximale en posant \({n}_{c, \text{sup}}={n}_{c, \text{sup}, \text{max}}\) et son orientation dans le repère \((x,y)\) donnée par l’angle \({\theta}_{\text{sup}}\) que fait sa direction avec l’axe \(y\) (l’orientation de \({n}_{c, \text{sup}, \text{min}}\) est donnée par \(\frac{\pi}{2}+ {\theta}_{\text{sup}}\) ), ainsi que le rapport des deux contraintes principales à savoir \({\alpha}_{\text{sup}}=\frac{{n}_{c, \text{sup}, \text{min}}}{{n}_{c, \text{sup}, \text{max}}}\) .
Les équations d’équilibre se déduisent de celles de CAS_SAND=2bis, par symétrie.
Une fois que le calcul de l’équilibre membranaire a abouti, l’épaisseur de la couche intermédiaire de béton peut être déduite par \({t}_{c}=h-{t}-{t}_{\text{inf}}\) .
La couche intermédiaire fera l’objet de l’équilibre du cisaillement hors-plan ou transverse, à savoir le couple d’efforts \({Q}_{x}\) et \({Q}_{y}\) . En isolant ainsi cette troisième couche des deux couches supérieure et inférieure, on confère au modèle Sandwich une dynamique de fonctionnement orthotrope, ce qui en soi est un avantage important par rapport à la méthode de Capra Maury.
Pour le calcul du ferraillage transversal au niveau de la couche intermédiaire, on applique un raisonnement similaire au ferraillage des poutres à l’effort tranchant. Pour cela, il convient d’évaluer l’effort tranchant principal équivalent \({V}_{\text{Ed}}\) et sa direction \(\beta\) comme suit:
Dans la direction de l’effort tranchant principal, l’élément de plaque se comporte donc comme une poutre et il convient alors de se référer à une modélisation en treillis de Ritter-Mörsch, dans le cas où \({V}_{\text{Ed}}\) est supérieur à l’effort tranchant résistant du béton seul \({V}_{\text{Rd}, c}\) . Les spécifications et démarches du §6.2 de l’EN-1992-1 s’appliquent alors. En particulier, pour le calcul du taux de ferraillage longitudinal \({\rho}_{L}\) , on considère:
où \({\rho}_{x}=\frac{{A}_{xy, \text{sup}}+{A}_{xy, \text{inf}}}{{t}_{c}}\) et \({\rho}_{y}=\frac{{A}_{s_y, \text{sup}}+{A}_{s_y, \text{inf}}}{{t}_{c}}\). Quitte à comptabiliser uniquement les armatures tendues.
Fig. 452 Ferraillage de la couche intermédiaire à l’effort tranchant principal équivalent#
Par ailleurs, pour la prise en compte de l’état de précontrainte (impact sur les coefficients \({\alpha}_{\text{cw}}\) et \({\stressCmp}_{\text{cp}}\) ), on considère comme effort normal de calcul:
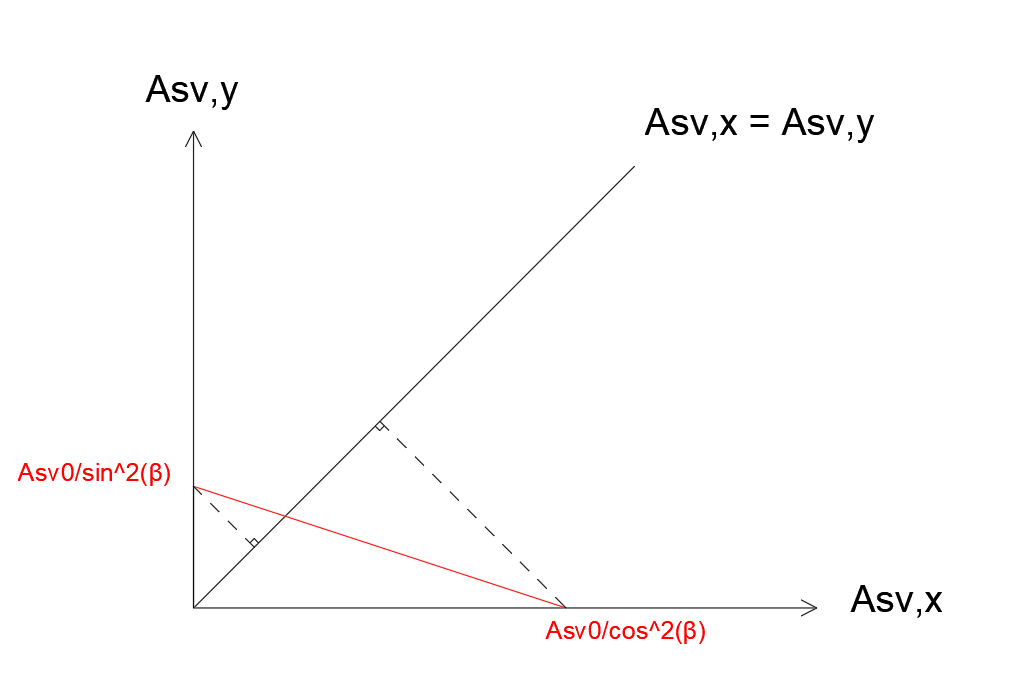
Dans le cas où le calcul montre qu’un ferraillage transversal est requis (\({V}_{\text{Ed}} \gt {V}_{\text{Rd},c}\) ) alors on calcule, conformément à l’Eurocode, un ferraillage de design \({A}_{\text{sv0}}\) (en \(cm^{2}\,{ml}^{-1},{ml}^{-1}\)) suivant la direction \(\beta\) et de là, on transite au ferraillage transversal réel de sorte à vérifier l’inéquation ci-dessous:
C’est un raisonnement analogue à celui introduit dans Capra-Maury.
Fig. 453 Recherche du ferraillage transversal optimal#
Ainsi la recherche de l’optimum de ferraillage consiste à déterminer le point de la droite rouge, dont le projeté sur la première bissectrice du plan \(\left( {A}_{\text{sv}, x}; {A}_{\text{sv}, y}\right)\) est le plus proche de l’origine du repère. Par conséquent, on retiendra comme solution finale:
Si \(\beta =0\), alors \({A}_{\text{sv}, x} = {A}_{\text{sv0}} \text{ et } {A}_{\text{sv}, y}=0\)
Si \(\beta =\pm \frac{\pi}{2}\), alors \({A}_{\text{sv}, x}=0 \text{ et } {A}_{\text{sv}, y}={{A}_{\text{sv0}}}\)
Sinon:
si \(\left\vert \beta \right\vert \lt \frac{\pi}{4}\), on prend \({A}_{\text{sv}, x}=\frac{{A}_{\text{sv0}}}{{\cos}^{2} \beta } \text{ et } {A}_{\text{sv}, y}=0\)
si \(\left\vert \beta \right\vert \gt \frac{\pi}{4}\), on prend \({A}_{\text{sv}, x}=0\text{ et }{A}_{\text{sv}, y}=\frac{{A}_{\text{sv}, 0}}{{\sin}^{2}\beta }\)
si \(\left\vert \beta \right\vert=\frac{\pi}{4}\), on prend \({A}_{\text{sv}, x}=\frac{{A}_{\text{sv},0}}{2{\cos}^{2}\beta } \text{ et }{A}_{\text{sv},y}=\frac{{A}_{\text{sv}, 0}}{{2\sin}^{2}\beta }\)
Par ailleurs, dans le cas où le ferraillage transversal est requis, il faut ajouter les efforts supplémentaires de traction introduits:
\(\theta\) étant l’angle d’inclinaison de la bielle de compression dans le treillis de Ritter-Mörsch pour le ferraillage à l’effort tranchant de la poutre de direction \(\beta\) .
Pour le pourcentage d’acier longitudinal minimal dans la direction principale, et conformément aux spécifications du §9.3 de l’EC2, les spécifications de la présente documentation s’appliquent.
Aucun seuil minimal n’est requis pour le ferraillage transversal.
Lorsque le calcul de ferraillage est effectué à l’ELS-QP, il est possible de tenir compte du ferraillage minimal pour le maîtrise de la fissuration à l’Eurocode 2 et aux RCC-CW.
Conformément à l’équation 7.1 du §7.3.2 de l’EC2 ou à l’équation DCONC 4110-2 du §DCONC 4110 du RCC-CW, cette armature minimale est telle que:
\[{A}_{s,\text{min}} \stressCmp_{s}
=
k_{c} k f_{\text{ct}, \text{eff}} \, A_{\text{ct}}\]
où
\({A}_{s, text{min}}\) est la quantité minimale de ferraillage à mettre dans les zones tendues;
\({f}_{\text{ct}, \text{eff}}\) est la résistance éffective à la traction du béton;
\({A}_{\text{ct}}\) est l’aire de béton en traction;
\({\stressCmp}_{s}\) est la contrainte admissible dans l’acier;
\({k}_{c}\) et \({k}\) sont calculés selon l’Eurocode 2. En particulier, le paramètre \({k}_{c}\) dépend de l’effort normal appliqué sur la section de béton armé.
Le ferraillage minimal peut donc dépendre des efforts appliqués à la structure.
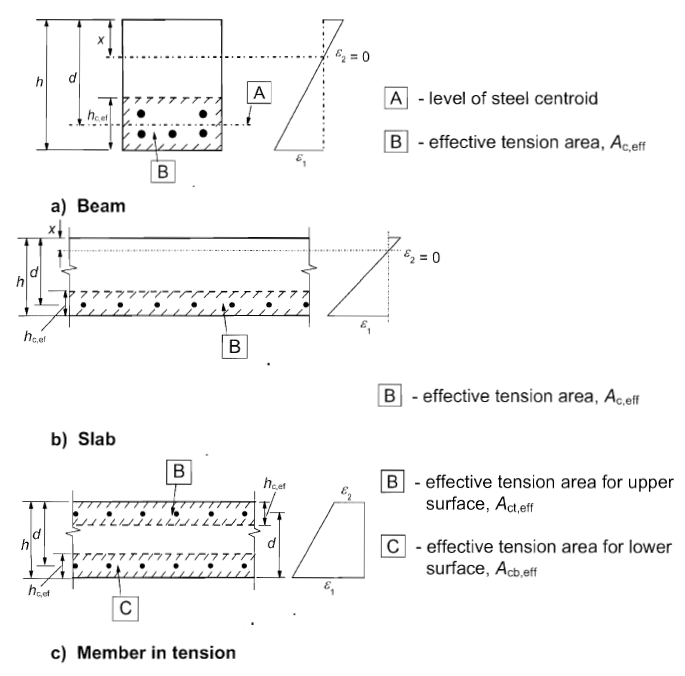
Par simplicité, \(sigma_{s}\) est considéré égal à la limite d’élasticité de l’acier \(f_{\text{yk}}\). Le calcul de l’aire de béton en traction \(A_{\text{ct}}\) peut se faire en considérant la hauteur
efficace de béton en traction \(h_{c, \text{ef}}\), qui vaut, conformément à l’Eurocode 2, §7.3.2:
où \(h\), \(d\) et \(x\) représentent respectivement la hauteur effective, la hauteur utile et la profondeur de l’axe neutre de la section.
Fig. 454 Extrait de l’Eurocode 2 montrant la hauteur effective de béton en traction.#
Par simplicité et conservatisme, on considère \({h}_{c, \text{ef}} = \frac{h}{2}\).
Par ailleurs, pour le calcul de ferraillage minimal pour la maîtrise de la fissuration des voiles et des planchers, il est possible de tenir compte de l’effet d’échelle selon l’équation DN 2200-1 du § DN2200 du RCC-CW.
Propriétés relatives au champ de ferraillage de sortie#
La version actuelle de l’opérateur [CALC_FERRAILLAGE] propose également le calcul des grandeurs ci-dessous, à l’issue de la détermination du champ de ferraillage requis par l’élément:
A l’issue des calculs à ELU, ELS et ELSQP, les sections d’acier de flexion \({A}_{\text{XS}}\) , \({A}_{\text{XI}}\) , \({A}_{\text{YS}}\) , \({A}_{\text{YI}}\) et les sections d’acier d’effort tranchant \({A}_{\text{sv}, x} ` et :math:`{A}_{\text{sv}, y} ` sont exploitées pour calculer la densité volumique d'armature :math:`{\delta}_{\text{BA}}\) en \(kg.{m}^{-3}\) si elles sont exprimées en \({m}^{2}.m^{-1}\) pour les aciers de flexion en \({m}^{2}.m^{-2}\) pour les aciers d’effort tranchant suivant la formule suivante où \({\rho}_{\text{acier}}\) est la masse volumique des aciers en \({kg}.{m}^{-3}\) .
Calcul de l’indicateur de complexité de constructibilité#
Un indicateur de complexité \({I}_{c,i}\) visant à traduire la difficulté de mise en œuvre du ferraillage sur le terrain est calculé selon la formule suivante:
\({\alpha}_{\text{reinf}}\) est un coefficient de pondération du ratio de densité d’acier par mètre cube de béton;
\({\rho}_{i}\) est la densité volumique totale d’acier pour l’élément \(i\) calculée précédemment \({\delta}_{\text{BA}}\) ;
\({\rho}_{\text{critic}}\) est la densité volumique d’acier critique pour l’élément \(i\);
\({\alpha}_{\text{shear}}\) est un coefficient de pondération du ration de densité d’acier d’effort tranchant;
\({A}_{\text{sw},i}\) est la densité d’acier d’effort tranchant pour l’élément \(i\);
\({A}_{\text{sw}, \text{critic}}\) est la densité de ferraillage d’effort tranchant critique;
\({\alpha}_{\text{stirrups}}\) est un coefficient de pondération du ration de longueur des épingles d’acier d’effort tranchant;
\({h}_{\text{eff},i}=h-c-c^{\prime}\) est la hauteur efficace considérée pour l’élément \(i\);
\({l}_{\text{crit}}\) est la longueur critique des épingles d’aciers d’effort tranchant.
\({\alpha}_{\text{reinf}}\), \({\alpha}_{\text{shear}}\) et \({\alpha}_{\text{stirrups}}\) ont pour valeur par défaut \(1\). La densité volumique d’acier critique \({\rho}_{\text{critic}}\) à pour valeur par défaut \(150 \,kg.m^{-3}\), la densité de ferraillage d’effort tranchant critique \({A}_{\text{sw},\text{critic}}\) a pour valeur par défaut \(60\,{cm}^{2}.m^{-2}\) et la longueur critique des épingles d’aciers d’effort tranchant a pour valeur par défaut \(1~m\) .
Avec de telles valeurs, on considère que la transition entre constructible et inconstructible est donné pour des valeurs de \({l}_{c}\) entre \(1,0\) et \(1,2\). Au-delà de \({l}_{c}=2,0\) on considère que la mise en œuvre du ferraillage est très compliqué et au-delà de \({l}_{c}=3,0\) on considère que la mise en œuvre du ferraillage est impossible.
Cette section présente la méthode utilisée pour la vérification d’un ferraillage existant employée dans l’opérateur [VERI_FERRAILLAGE] et la macro-commande [POST_VERI_FERRAILLAGE].
L’objectif est de vérifier si la structure avec un ferraillage existant (issu d’un plan de ferraillage ou d’un calcul de ferraillage) supporte une charge donnée en fournissant une marge mécanique et/ou un taux d’utilisation de la capacité maximale de la structure sous cette charge.
La méthode utilisée est inspirée de celle employée dans l’outil RunAéro [bib3].
Comme pour le calcul de ferraillage des plaques, la vérification est aussi basée sur l’algorithme de Capra-Maury. Les différentes étapes de la méthode employée sont les suivantes :
On considère \(n\) facettes pivotant autour de l’axe normal à chaque élément fini (comme présenté dans la partie Calcul du ferraillage longitudinal).
Chacune des facettes est définie par son vecteur normal \(\vector{n}(\theta)\) faisant un angle \(\theta\) avec l’axe local \(x\) de la plaque.
Cela permet d’assimiler l’étude d’une plaque à un problème équivalent des poutres (1D).
Le ferraillage supérieur et inférieur suivant \(x\) et \(y\) de la plaque sera projeté sur la facette comme suit,
permettant d’obtenir le ferraillage de la poutre fictive (\({A}_{s, \text{sup}}(\theta)\) et \({A}_{s, \text{inf}}(\theta)\)) :
Dans cette étape, le diagramme d’interaction de chaque facette sera construit. Le diagramme d’interaction d’une section en béton armé représente l’ensemble des points \((N, M)\) correspondant à un état limite de la section.
Ces points sont ensuite tracés sur un graphe 2D dont l’axe des abscisses représente l’effort normal et l’axe des ordonnées le moment fléchissant.
Tout point de la courbe représente une combinaison unique de moment fléchissant et d’effort normal à laquelle la section peut résister.
La construction de ce diagramme est réalisée en considérant les diagrammes de déformation ou de contrainte relative sur la hauteur de la section, passant par l’un des trois pivots A, B ou C (voir r7.04.05-calcul-ferraillage-1D pour plus d’informations sur la règle et la définition des trois pivots).
ELU:
La démarche de construction de ce diagramme à l’ELU consiste à envisager successivement les diagrammes de déformations pivotant autour des trois pivots A, B ou C (voir r7.04.05-equilibre-calcul-sections-acier pour plus d’informations sur la règle et la définition des trois pivots).
Pour le calcul des points du diagramme, la loi Parabole-Rectangle (voir r7.04.05-loibetonelu) est utilisée pour le béton, et le choix est libre entre un palier incliné ou horizontal pour l’acier.
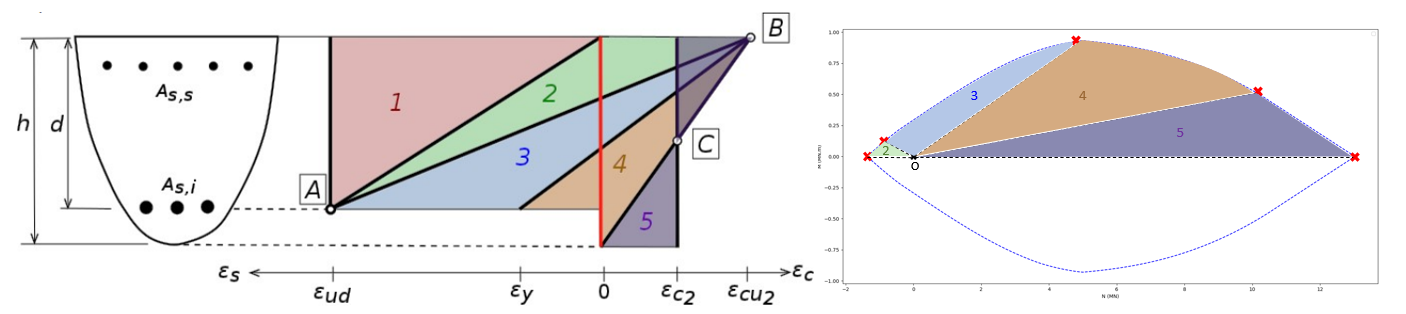
Pour illustration, la figure Extrait de l’Eurocode 2 montrant la hauteur effective de béton en traction. montre un exemple de diagramme d’interaction pour un cas particulier où l’acier supérieur et inférieur est symétrique (même quantité et même enrobage) et un diagramme à palier horizontal est choisi pour l’acier.
La construction du diagramme est effectuée en le decoupant en cinq domaines comme suit :
Domaine 1 : On commence par un diagramme vertical passant par le pivot A.
Ensuite, en maintenant le pivot A pour l’acier inférieur, on fait pivoter la déformation jusqu’à une déformation nulle sur la partie supérieure de la section.
L’axe neutre se trouve à l’extérieur de la section (au-dessus de la fibre supérieure) et toute la section est en traction. Le béton ne travaille pas dans ce domaine.
Dans l’exemple illustré, la déformation dans l’acier supérieur reste toujours supérieure à la déformation correspondante à la limite élastique.
Avec un palier horizontal, cela conduit à la contrainte maximale \(f_{\text{yd}}\) égale à celle de l’acier inférieur.
En raison de la symétrie de l’acier, cela conduit à un moment nul et à la même force sur tout le domaine 1.
C’est pourquoi le domaine 1 en rouge n’apparaît pas sur le diagramme d’interaction.
Domaine 2 : Ensuite, on continue à pivoter autour du pivot A jusqu’à atteindre le pivot B sur la fibre supérieure de la section.
Dans ce domaine, l’axe neutre est désormais à l’intérieur de la section et la section est partiellement comprimée.
La partie du béton en compression travaille donc.
Domaine 3 : En fixant le pivot B à la fibre supérieure, on déplace la déformation de l’acier inférieur vers la droite jusqu’à la déformation correspondante à la limite élastique de l’acier.
L’axe neutre est toujours à l’intérieur de la section et la section reste partiellement comprimée.
Domaine 4 : Toujours en fixant le pivot B à la fibre supérieure, on continue à déplacer la déformation de l’acier inférieur qui devient élastique puis passe en compression.
On s’arrête lorsque la déformation de la fibre inférieure est nulle. L’axe neutre reste à l’intérieur de la section et la section passe de partiellement comprimée à une compression pure.
Domaine 5 : Dans ce domaine, on pivote maintenant autour du pivot C jusqu’à atteindre une compression uniforme sur toute la section avec une déformation égale au pivot C \(({\strainCmp}_{\text{c2}})\).
Cette méthode permet d’obtenir la partie supérieure du diagramme, au-dessus de l’axe des abscisses, correspondant à une section inférieure tendue. En raison de la symétrie du problème, la partie inférieure du diagramme est obtenue par symétrie par rapport à l’axe des abscisses.
Fig. 455 Construction du diagramme d’intéraction N-M à l’ELU#
ELS:
À l’ELS, une section homogénéisée acier-béton est considérée, de sorte que le diagramme des contraintes soit systématiquement linéaire (voir r7.04.05-dimensionnement-ELS).
Pour cela, la construction du diagramme d’interaction à l’ELS est réalisée de manière similaire à la règle des pivots du diagramme de déformation aux ELU, mais appliquée au diagramme des contraintes.
Deux pivots sont considérés à l’ELS : le pivot A, où l’acier atteint sa limite, et le pivot B, où le béton atteint sa limite.
De manière similaire, tous les états limites sont parcourus, de la traction uniforme (pivot A) jusqu’à la compression uniforme (pivot B).
On commence par pivoter autour du pivot A pour l’acier inférieur jusqu’à atteindre le pivot B sur la fibre supérieure, puis on pivote autour de B jusqu’à la compression uniforme.
Comme à l’ELU, cette méthode permet d’obtenir la partie supérieure du diagramme, au-dessus de l’axe des abscisses, correspondant à une section inférieure tendue.
En raison de la symétrie du problème, la partie inférieure du diagramme est obtenue par symétrie par rapport à l’axe des abscisses.
Note
Le nombre de points du diagramme, souvent autour de 600 points, varie en fonction des caractéristiques géométriques (notamment le rapport \(\frac{h}{d}\)) et des valeurs des pivots.
L’objectif de cette méthode est d’évaluer la réponse structurelle en suivant un chemin de chargement donné.
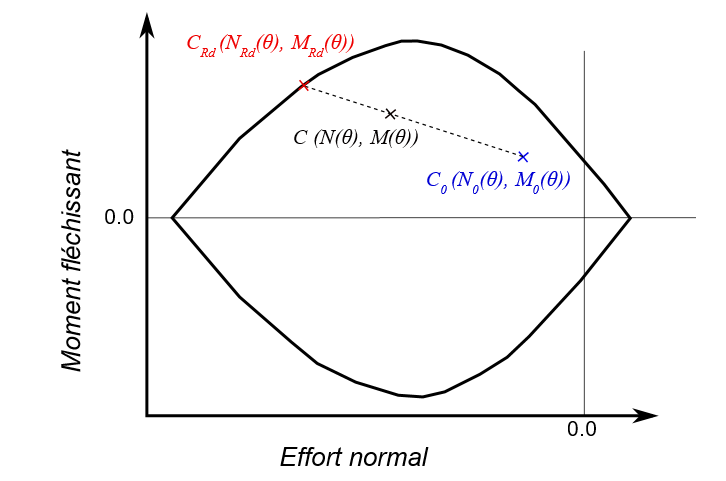
Ce chemin de chargement peut être défini par deux types de chargements : un chargement de référence \(C_0\), souvent constitué des charges permanentes,
et une charge d’étude \(C\) (le nouveau chargement à évaluer). Ces chargements (sollicitations 2D \((N_{xx}, N_{yy}, N_{xy}, M_{xx}, M_{yy}, M_{xy})\)) seront projetés sur la facette à l’aide des équations (4607) et (4608) ,
ce qui permet d’obtenir le torseur d’efforts réduits 1D\((N_0(\theta), M_0(\theta))\) pour le chargement de référence et le torseur \((N(\theta), M(\theta))\) pour la charge d’étude.
En plaçant ces deux points sur le diagramme d’interaction correspondant à la facette,
on peut déterminer un troisième point \(C_{\text{Rd}}\) comme étant le point d’intersection de la demi-droite \(\left[ C_{0C} \right)\) avec le diagramme, comme illustré sur la figure r7.04.05-diagramme-calcul-marge.
Fig. 456 Diagramme d’interaction M-N pour une facette et points de chargement.#
Une marge positive indique que le point de chargement est à l’intérieur du diagramme, ce qui signifie que le ferraillage est vérifié.
Plus la marge est grande, moins il y a de risque. Une marge négative indique que \(C_0 \, C\) est supérieur à \(C_0 \, C_{\text{Rd}}\) et que l’élément n’est pas vérifié pour la charge étudiée.
La macro-commande [POST_VERI_FERRAILLAGE] permet en outre de calculer les paramètres liées à l’état d’équilibre de la facette critique identifiée par l’opérateur [VERI_FERRAILLAGE]. Les paramètres d””équilibre de la section critique qui sont calculés sont les suivants: la hauteur comprimée, la déformation de la fibre supérieure du béton, la déformation des aciers
supérieurs et inférieurs, la contrainte de compression de la fibre supérieure du béton et les contraintes dans les aciers supérieurs et inférieurs.
Pour les équations d’équilibre, on suppose un diagramme de déformation linéaire conformément aux hypothèses de Euler-Bernoulli. Ainsi, la déformation en toute fibre de la section, située à une distance \(z\) par rapport à la fibre supérieure du béton dépend de la profondeur de l’axe neutre par rapport à la fibre supérieure du béton \(x\) et de la courbure \(\chi\), par la relation:
\[\strainCmp
=
-
\chi(z-x)\]
Les lois de comportement du béton et de l’acier permettent d’obtenir pour chaque fibre, la contrainte correspondante.
Pour trouver l’équilibre, il suffit alors de trouver le couple \((x,\chi)\)
permettant d’équilibrer le torseur \((N,M)\) considéré. On obtient alors une système de deux équations à deux inconnues:
où \(y\) représente la distance de la fibre considérée par rapport au centre d’inertie de la section.
À l’ELS, la solution est obtenue avec une approche directe. Cependant, à l’ELU, le système d’équation devient non linéaire. Il est résolu avec la méthode itérative de Newton-Raphson et le point de départ des itérations est la solution à l’ELS.
[bib1] Calcul automatique du ferraillage optimal des plaques et coques en béton armé. Alain CAPRA et Jean-Francis MAURY Annales de l’Institut Technique du Bâtiment et des travaux publics, n°367, 12/1978.