r5.03.26 Loi d’endommagement régularisée quadratique ENDO_CARRE#
Résumé:
Ce document décrit le modèle de comportement élastique fragile ENDO_CARRE disponible seulement pour la modélisation non locale à gradient d’endommagement nodal GVNO. Cette loi présente une rigidité quadratique en endommagement et une dissipation linéaire. Le critère est donc linéaire et admet ainsi une solution unique en endommagement à déplacements fixés, ce qui permet d’obtenir des résultats rapides et facilement comparables avec l’analytique. L’autre intérêt de cette loi est la distinction des comportements en traction et en compression. Elle permet un endommagement en cisaillement dans les cas de compression et évite l’interpénétration.
Formulation variationnelle du problème d’endommagement#
Cas d’une loi générique (explicité ici en traction)#
Deux approches équivalentes peuvent être utilisées pour décrire le processus d’endommagement d’un matériau isotrope fragile. D’un côté il est possible de dériver la loi d’endommagement dans le cadre des matériaux standard généralisés. Dans ce cas, il est nécessaire de définir l’énergie libre du système ainsi qu’un potentiel de dissipation. La règle d’écoulement établit alors l’évolution des variables internes.
Comme pour la description d’endommagement on a seulement besoin d’une variable scalaire. La description précédente se simplifie et peut être ramenée à un problème variationnel sous contrainte d’accroissement d’endommagement [bib2].
Pour définir une loi de comportement à gradient d’endommagement, il suffit donc d’exprimer la densité d’énergie libre totale (élastique+dissipation) en fonction du tenseur des déformations \(\varepsilon\) et de la variable d’endommagement \(0\le a\le 1\) . La répartition spatiale de l’endommagement est donnée alors par un champ \(a(x)\) . La densité d’énergie libre se présente en général sous la forme suivante :
\(\Phi (\varepsilon ,a)=A(a)w(\varepsilon )+\omega (a)+c/2{(\nabla a)}^{2}\) éq 2.1-1
Ici \(c\) est le paramètre de non localité (C_GRAD_VARI) \(w(\varepsilon )\) l’énergie de déformation élastique, \(\omega (a)\) l’énergie de dissipation et \(A(a)\) la fonction de rigidité. \(a=0\) correspond au matériau sain et \(a=1\) correspond au matériau complètement endommagé : \(A(1)=0,A(0)=1\) . Le problème d’évolution est désormais un simple problème de minimisation d’énergie libre de Helmholtz \(F\equiv \int\Phi (\varepsilon ,a)d\Omega\) sous contrainte \(\dot{a}\ge 0\) [1] .
\({\min}_{(\varepsilon ,a)}F(\varepsilon ,a),\text{où}F(\varepsilon ,a)=\int\left[\Phi (\varepsilon ,a)\right]d\Omega\)
où on remplace \(w(\varepsilon )=\varepsilon :E:\varepsilon /2\) en utilisant la définition du tenseur de Hooke. Deux équations dérivent du problème variationnel de minimisation : \(\delta F(\varepsilon ,a)/\delta \varepsilon =0\) [2] et \(\delta F(\varepsilon ,a)/\delta a\ge 0\) . L’inégalité dans la deuxième équation est liée à la présence de contraintes imposées. Ces deux équations doivent être satisfaites partout dans le domaine d’intégration \(\Omega\) . Elles sont complétées par une équation de cohérence de Kuhn-Tucker \(\dot{a}\cdot \delta F(\varepsilon ,a)/\delta a=0\) . Sur les bords \(\partial \Omega\) nous obtenons une condition de normalité supplémentaire \(\nabla a\cdot n=0\) , où \(n\) est un vecteur-normal. Enfin la variable d’endommagement et son gradient doivent être continus à intérieur du domaine d’intégration pour réaliser le minimum de la fonctionnelle en question (voir [bib2,4] pour plus de détails).
Relations de comportement#
Le lien entre la formulation variationnelle et les lois d’évolution habituelles est direct. L’état du matériau est caractérisé par la déformation \(\varepsilon\) et l’endommagement \(a\) , compris entre 0 et 1. On définit la relation contrainte-déformation, qui reste élastique, et la rigidité est affectée par l’endommagement:
\(\sigma =\delta F(\varepsilon ,a)/\delta \varepsilon =A(a)E:\varepsilon\) éq 2.2-1
avec \(E\) le tenseur de Hooke. L’évolution de l’endommagement, toujours croissante, est gouvernée par la fonction seuil suivante:
\(f(\varepsilon ,a)=-\delta \Phi (\varepsilon ,a)/\delta a=-\frac{1}{2}A'(a)\varepsilon :E:\varepsilon -\omega '(a)+c\Delta a\) éq 2.2-2
La condition de cohérence prend alors sa forme habituelle:
\(f(\varepsilon ,a)\le 0\dot{a}\ge 0\dot{a}f(\varepsilon ,a)=0\) éq 2.2-3
On note deux particularités de cette formulation. Premièrement, la fonction seuil est non-locale à cause de la présence du laplacien d’endommagement. Ensuite, l’absence de condition d’écoulement se justifie par le double rôle de l’endommagement \(a\) , d’un côté elle se présente comme une variable d’évolution interne, de l’autre côté elle remplit la mission du paramètre de Lagrange \(\lambda \equiv a\) .
On voit aussi l’avantage de présentation des lois d’endommagement sous leur forme variationnelle. Il suffit de décrire la densité d’énergie libre totale (éq.2.1-1), qui inclut la dissipation, pour définir complètement la loi d’évolution.
Identification de la loi ENDO_CARRE#
Dans la loi ENDO_CARRE les fonctions de rigidité et de dissipation sont choisies comme suit :
\(A(a)={(1-a)}^{2},\omega (a)=\mathrm{ka}\)
Les paramètres mécaniques de la loi sont au nombre de trois. D’une part, le module de Young \(E\) et le coefficient de Poisson \(\nu\) qui déterminent le tenseur de Hooke par:
\({E}^{-1}\cdot \sigma =\frac{1+\nu }{E}\sigma -\frac{\nu}{E}(\text{tr}\sigma )\text{Id}\) éq 2.3-1
ainsi que \(k\) , qui définit le comportement adoucissant et la largeur caractéristique de la bande d’endommagement. En notant \({\sigma}_{y}\) la contrainte au pic et \(l\) la longueur interne caractéristique de la taille de la zone endommagée, on établit les relations suivantes :
\(k=\frac{{\sigma}_{y}^{2}}{E},c=E{l}^{2}\)
Les paramètres du modèle sont directement donnés sous les mots-clé facteurs ECRO_LINE (SY) et NON_LOCAL (C_GRAD_VARI) de l’opérateur DEFI_MATERIAU. Quant à \(E\) et \(\nu\) , ils sont donnés classiquement sous le mot-clé facteur ELAS ou ELAS_FO. A noter que le paramètre D_SIGM_EPSI n’est pas utilisé ici bien qu’il faut lui donner une valeur dans le fichier de commande, car il est en statut obligatoire. On a utilisé le mot clé ECRO_LINE pour éviter la duplication dans DEFI_MATERIAU d’objets faisant tous référence à la contrainte limite.
Exemple : |
\(\begin{array}{}E=30\text{GPa,}\nu =0.2\\ {\sigma}_{y}=3\text{MPa}\end{array}\) |
\(\begin{array}{}\text{ELAS}(\text{E}={3.10}^{10},\text{NU}=0.2)\\ \text{ECRO\_LINE}(\text{SY}={3.10}^{6},\text{D\_SIGM\_EPSI}=2.0)\\ \text{NON\_LOCAL}(\text{C\_GRAD\_VARI}={3.10}^{10}{l}^{2})\end{array}\) |
On présente ci-dessous la réponse \(\sigma (\varepsilon )\) obtenue en 1 point, à partir des paramètres choisis en exemple :
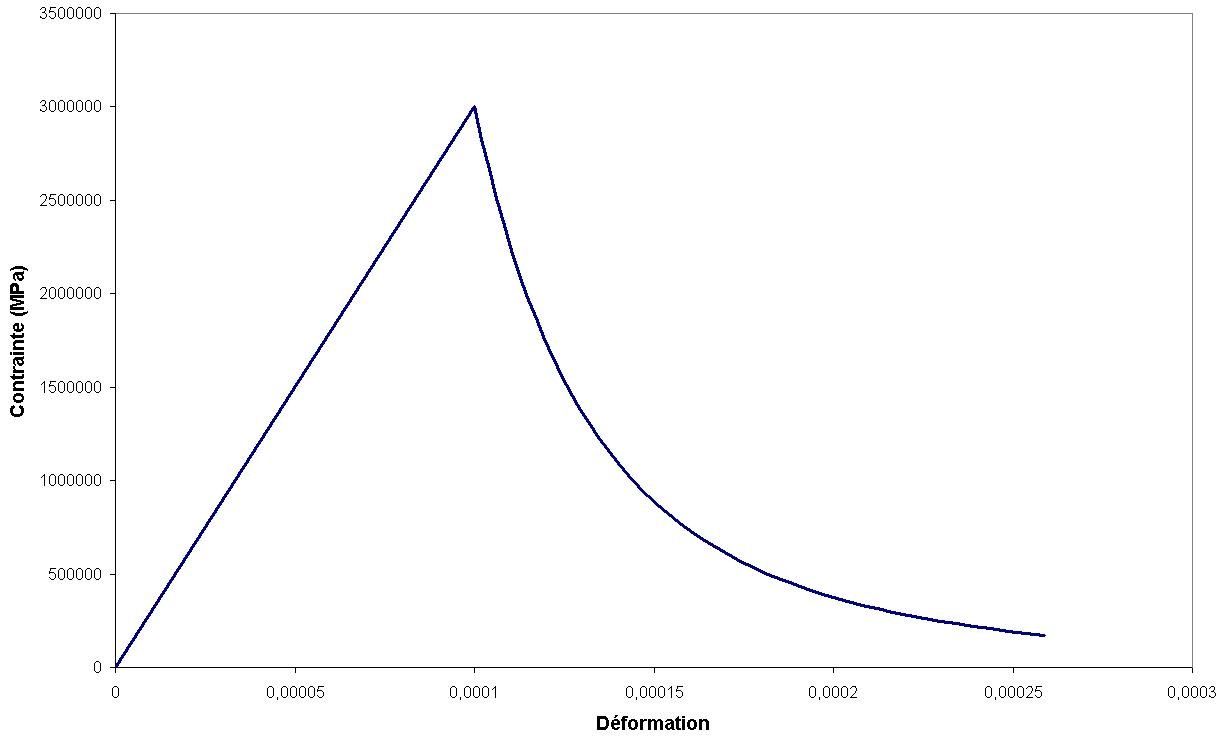
Figure 1 : Réponse contrainte-déformation
Tant que l’on atteint pas la contrainte critique \({\sigma}_{y}\) , la réponse est élastique linéaire et l’endommagement est nul. Une fois cette valeur atteinte, on observe une décroissance de la contrainte en fonction de la déformation en \({\varepsilon}^{-3}\) . Ce qui s’explique par la diminution quadratique de la rigidité en fonction de l’endommagement.
Comportement en compression#
Dans le cas de la traction («ouverture de fissure»), on corrige l’énergie élastique d’un facteur quadratique correspondant à la perte de rigidité (voir éq 2.2.1 ). Dans le cas de la compression («fermeture»), on ne corrige que la partie associée au tenseur déviatorique des déformations. Le champ de contrainte peut alors s’écrire sous la forme :
\(\sigma ={(1-a)}^{2}({k}_{2}\mathrm{tr}(\varepsilon )H\mathrm{tr}(\varepsilon )+2\mu {\varepsilon}_{D})+{k}_{2}\mathrm{tr}(\varepsilon )H\mathrm{tr}(-\varepsilon )\)
Où \({\varepsilon}_{D}\) est le tenseur déviatorique des déformations, \(H\) la fonction d’Heaviside et \({k}_{2}=\lambda +\frac{2\mu }{3}\) , avec \(\lambda\) et \(\mu\) les coefficients de Lamé.
Les contraintes devant être finies, la trace du tenseur des déformations est contrôlée. Cela permet d’éviter les déformations importantes dans la direction des efforts, contrairement à ce qui est fait pour la traction. Compte tenu de la perte de rigidité affectée à la partie déviatorique, il est toutefois possible d’obtenir des sauts de glissement dans la direction du cisaillement. Ce comportement interdit l’interpénétration mais permet donc l’endommagement par cisaillement.
Le critère s’en retrouve également modifié comme suit :
\(f(\varepsilon ,a)=-\frac{1}{2}A'(a)\left[2\mu {\varepsilon}_{D}:{\varepsilon}_{D}+H(\mathrm{tr}(\varepsilon )){k}_{2}{(\mathrm{tr}(\varepsilon ))}^{2}\right]-\omega '(a)+c\Delta a\)
Ce modèle est très bien représentatif du comportement d’une structure en béton lorsque l’endommagement se présente sous la forme de bande. Ce qui est toujours le cas en 2D. Toutefois, pour avoir un bon comportement en compression en 3D, dans le cas où l’endommagement ne se présenterait plus sous forme de bande, il faudrait que l’on fasse porter l’endommagement non plus sur le déviateur, mais sur le rotationnel.
Description des variables internes#
Les variables internes sont au nombre de deux:
\(\mathrm{VI}(1)\) endommagement \(a\)
\(\mathrm{VI}(2)\) indicateur \(\chi\)
Bibliographie#
LEMAITRE J., CHABOCHE J.L.: Mécanique des matériaux solides. Dunod: Paris, 1988.
LORENTZ E., ANDRIEUX S.: A variational formulation for nonlocal damage models. International Journal of Plasticity 1999; 15: 119-138.
LORENTZ E., GODARD V. : Gradient damage models: toward full-scale computations. Comput. Methods Appl. Mech. Eng. 2010 in press.
MARIGO J.J.: Formulation d’une loi d’endommagement d’un matériau élastique. Compte‑rendu de l’Académie des Sciences, Paris 1981; série II, 292(19): 1309-1312.
PHAM.K, AMOR.H, MARIGO.J.J, MAURINI.C : Gradient damage models and their use to approximate brittle fracture, preprint submitted to International Journal of Damage Mechanics, 13-15, 2009
SIMO J.C., TAYLOR R.L.: Consistent tangent operators for rate-independent elastoplasticity. Computer Methods in Applied Mechanics and Engineering 1985 ; 48 : 101-118.
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
J.BEAURAIN, K.KAZYMYRENKO EDF-R&D/AMA |
Texte initial |