r5.03.31 Loi de comportement FONDATION#
Résumé:
Ce document décrit le comportement élasto-plastique non linéaire d’une fondation superficielle rectangulaire soumise à une sollicitation tridimensionnelle statique ou sismique. Cette loi de comportement est affectée sur les éléments discrets 3D composé d’un unique nœud en translation/rotation (DIS_TR) affecté d’une matrice de raideur diagonale (K_TR_D_N) au moyen de la relation FONDATION appelée par les opérateurs de résolution de problèmes non linéaires STAT_NON_LINE [R5.03.01] ou DYNA_NON_LINE [R5.05.05]. Le mot clé pour définir les caractéristiques du matériau dans DEFI_MATERIAU est FONDA_SUPERFI.
La loi représente à la fois le mécanisme de glissement, le mécanisme de perte de capacité portante ainsi que le mécanisme de décollement de la fondation. Avant de mettre en jeu un des mécanismes précédemment cités, toutes les directions de chargement présentent un comportement élastique linéaire décrit par des caractéristiques classiques de rigidité.
On distingue dans la loi de comportement trois mécanismes qui peuvent se combiner:
le premier représentant le glissement entre la sous-face de la fondation et le sol (traité comme un mécanisme plastique avec écrouissage);
le second représentant le phénomène de perte de capacité portante sous l’effet d’une charge verticale trop importante (traité, là aussi, comme un mécanisme plastique avec écrouissage);
Le troisième représentant le phénomène de décollement-recollement de la fondation sous l’effet d’un moment important (traité comme un mécanisme élastique non linéaire).
Table des matières
Implantation dans Code_Aster#
La relation de comportement FONDA_SUPERFI est affectée à des éléments discrets de modélisation DIS_TR en 1 nœud. Cette relation est appelée par les opérateurs de résolution de problèmes non linéaires STAT_NON_LINE [R5.03.01] ou DYNA_NON_LINE [R5.05.05].
Les axes locaux de ces éléments x, y, z sont définis comme sur la .
L’intégration de cette relation de comportement des assemblages dans l’opérateur STAT_NON_LINE de Code_Aster nécessite la formulation de l’incrément de force \(\Delta F\) et les opérateurs tangents \({K}_{o}^{tan}\) et \({K}_{n}^{tan}\) .
\(\Delta F\) est l’incrément de chargement pendant le pas de temps (soit entre \(>\) et \(>\) ) provoqué par un incrément de déplacement \(\Delta U\) à ce même pas de temps.
\({K}_{n}^{tan}\) est la rigidité tangente à la fin du pas de temps, instant \(>\) .
\({K}_{o}^{tan}\) est la rigidité tangente au début du pas de temps, instant \(t\) égale à la rigidité tangente de la fin du pas précédent.
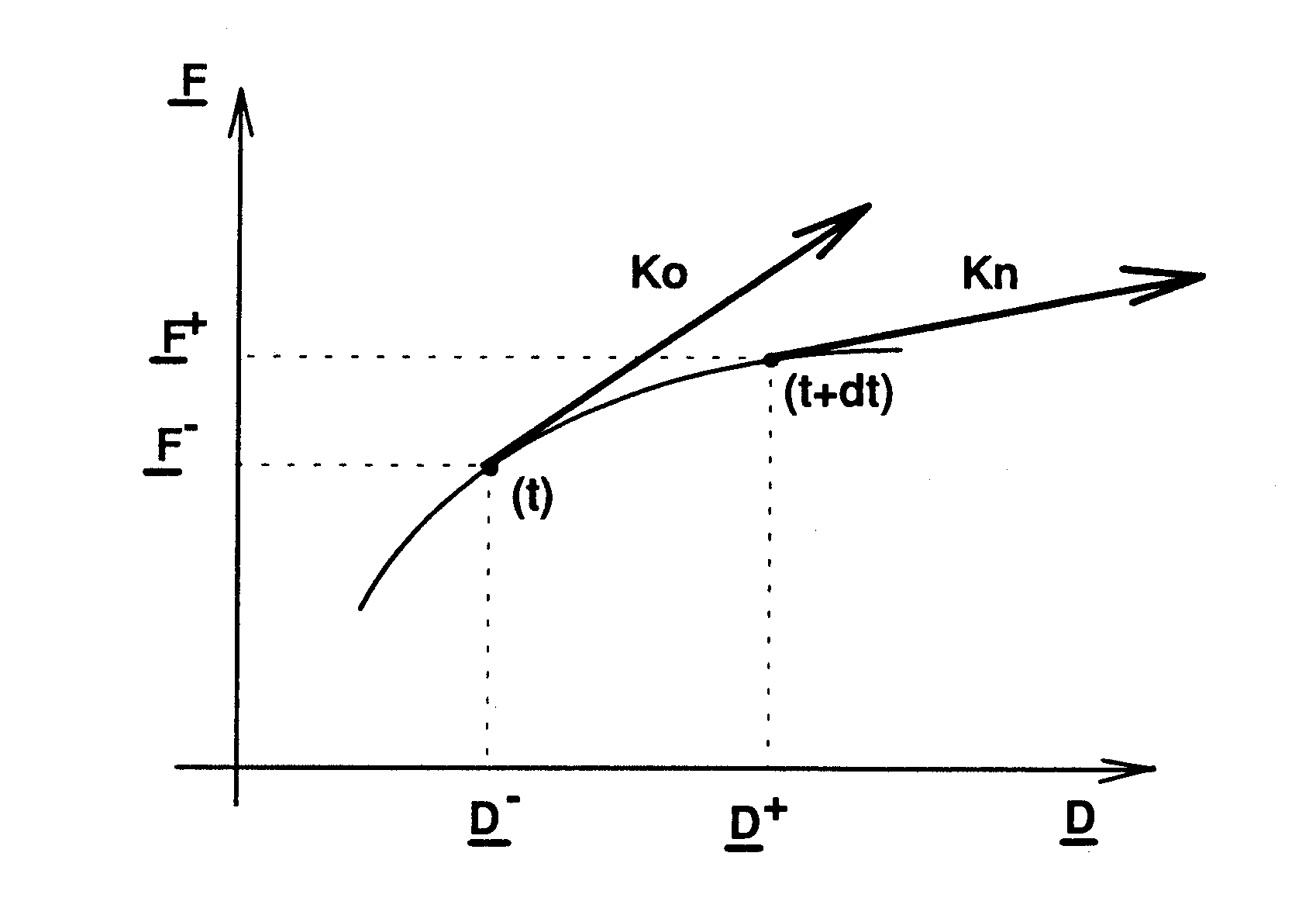
Figure 2-1: Définition des opérateurs \({K}_{o}^{tan}\) et \({K}_{n}^{tan}\)
Détermination de l’incrément de chargement#
Données d’entrées#
En plus des paramètres de la loi de comportement on dispose en entrée des variables au début du pas de temps (O):
de la force globale: \({F}^{O}={}^{T}\left({F}_{x}^{o},{F}_{y}^{o},{F}_{z}^{o},{M}_{x}^{o},{M}_{y}^{o},{M}_{z}^{o}\right)\text{ }\) ;
du déplacement: \({U}^{O}={}^{T}({u}_{x}^{o},{u}_{y}^{o},{u}_{z}^{o},{\theta}_{x}^{o},{\theta}_{y}^{o},{\theta}_{z}^{o})\text{ }\) ;
des variables internes d’écrouissage en glissement: \({Q}_{sl}^{o}={}^{T}({q}_{{h}_{x}}^{O},{q}_{{h}_{y}}^{O})\text{ }\) ;
du déplacement plastique en glissement: \({U}_{sl}^{O}={}^{T}({u}_{x,s}^{pl,O},{u}_{y,s}^{pl,O},{u}_{z,s}^{pl,O},{\theta}_{x,s}^{pl,O},{\theta}_{y,s}^{pl,O})\text{ }\) ;
des variables d’écrouissage en capacité portante: \({Q}_{sl}^{o}={}^{T}({R}_{h,x}^{O}\text{ },{R}_{h,y}^{O},{R}^{O},{R}_{m,x}^{O},{R}_{m,y}^{O})\text{ }\) ;
du déplacement plastique en CP: \({U}_{\mathit{CP}}^{O}={}^{T}({u}_{x,\mathit{CP}}^{pl,O},{u}_{y,\mathit{CP}}^{pl,O},{u}_{z,\mathit{CP}}^{pl,O},{\theta}_{x,\mathit{CP}}^{pl,O},{\theta}_{y,\mathit{CP}}^{pl,O})\text{ }\) ;
des variables internes intermédiaires en glissement et CP: \({v}_{x,s}^{pl,O}\) , \({v}_{y,s}^{pl,O}\) et \({v}_{z,CP}^{pl,O}\) ;
Ainsi que le déplacement final à la fin du pas de temps: \({U}^{F}={}^{T}({u}_{x}^{F},{u}_{y}^{F},{u}_{z}^{F},{\theta}_{x}^{F},{\theta}_{y}^{F},{\theta}_{z}^{F})\)
Il faut l’ensemble des variables à la fin du pas de temps (notation «F» à la place de «O»)
Constitution de la matrice élastique tangente#
Une matrice de rigidité initiale \({K}^{ini}\) doit être affectée à l’élément discret. Cette matrice doit être symétrique et diagonale dans son repère local (les termes non diagonaux sont ignorés).
La première étape consiste à partir de la force globale \({F}^{O}\) au début du pas de temps de calculer la raideur élastique tangente en rotation selon x \({K}_{\mathit{rx},\mathit{rx}}^{tan,o}\) et y \({K}_{\mathit{ry},\mathit{ry}}^{tan,o}\) avec la formulation vue au [§ 1.4 ] ainsi on obtient la matrice de raideur élastique tangente:
\({K}_{élas}^{o,tan}=\left(\begin{array}{cccccc}{K}_{xx}^{ini}& 0& 0& 0& 0& 0\\ 0& {K}_{yy}^{ini}& 0& 0& 0& 0\\ 0& 0& {K}_{zz}^{ini}& 0& 0& 0\\ 0& 0& 0& {K}_{\mathit{rx},\mathit{rx}}^{tan,o}& 0& 0\\ 0& 0& 0& 0& {K}_{\mathit{ry},\mathit{ry}}^{tan,o}& 0\\ 0& 0& 0& 0& 0& {K}_{\mathit{rz},\mathit{rz}}^{ini}\end{array}\right)\)
Tir élastique#
A partir de la matrice de rigidité élastique tangente, on calcule la force
\({F}^{élas}={}^{T}\left({F}_{x}^{élas},{F}_{y}^{élas},{F}_{z}^{élas},{M}_{x}^{élas},{M}_{y}^{élas},{M}_{z}^{élas}\right)\) que l’on obtiendrait si aucun mécanisme de plasticité n’est sollicité (aussi nommé «tir élastique»). Soit:
\({F}^{élas}={F}^{O}+{K}_{élas}^{O,tan}\cdot \left({U}^{F}-{U}^{O}\right)\)
Calcul de l’écoulement plastique#
Maintenant on calcule \({f}_{\mathit{CP}}\left({F}^{élas},{Q}_{\mathit{CP}}^{O}\right)\) et \({f}_{s}\left({F}^{élas},{Q}_{sl}^{O}\right)\) , voir § 1.3 et § 1.2 .
Si \({f}_{\mathit{CP}}\le 0`et :math:\)>`#
Alors aucun mécanisme de plasticité n’est atteint, la fondation est dans le domaine élastique, le tir élastique correspond à la force à la fin du pas de temps: \({F}^{F}={F}^{élas}\) et aucune variable de plasticité ne change:
\({Q}_{sl}^{F}={Q}_{sl}^{O}\text{ },{U}_{sl}^{F}={U}_{sl}^{O},{v}_{x,s}^{pl,F}={v}_{x,s}^{pl,O},{v}_{y,s}^{pl,F}={v}_{y,s}^{pl,O},\text{ }{Q}_{\mathit{CP}}^{F}={Q}_{\mathit{CP}}^{O}\text{ },{U}_{\mathit{CP}}^{F}={U}_{\mathit{CP}}^{O}\text{ }et\text{ }{v}_{z,\mathit{CP}}^{pl,F}={v}_{z,\mathit{CP}}^{pl,O}\)
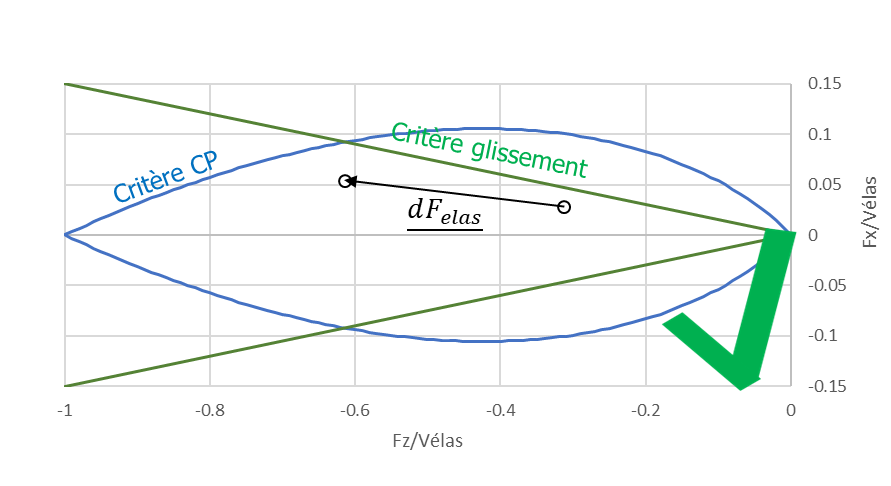
Figure 2.1-1: Illustration du tir élastique sans atteinte de mécanisme de rupture
Si \({f}_{\mathit{CP}}>0`et :math:\)>`#
Seul le mécanisme de perte de capacité portante est atteint, aucune variable de plasticité liée au glissement ne change:
\({Q}_{sl}^{F}={Q}_{sl}^{O}\text{ },{U}_{sl}^{F}={U}_{sl}^{O},{v}_{x,s}^{pl,F}={v}_{x,s}^{pl,O},{v}_{y,s}^{pl,F}={v}_{y,s}^{pl,O}\)
On cherche alors la correction en chargement \({dF}^{cor}\text{ }\) et l’évolution des variables d’écrouissage \({\mathrm{d}Q}_{\mathit{CP}}\) nécessaire pour revenir sur le critère, à savoir:
\({f}_{\mathit{CP}}({F}^{élas}-{\mathrm{d}F}^{cor},{Q}_{\mathit{CP}}^{O}+\mathrm{d}{Q}_{\mathit{CP}})=0\)
Cette équation est résolue par une boucle itérative jusqu’à convergence, en écrivant à l’itération k le développement limité de cette équation autour du point \(({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k})\) :
\({f}_{\mathit{CP}}\left({F}^{élas}-{\mathrm{d}F}^{cor},{Q}_{\mathit{CP}}^{O}+\mathrm{d}{Q}_{\mathit{CP}}\right)\approx \left\lbrace \begin{array}{c}{f}_{\mathit{CP}}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\\ +{}^{T}\left(\frac{\partial {f}_{\mathit{CP}}}{\partial F}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right)\left({F}^{élas}-{\mathrm{d}F}^{cor}-{F}^{ité,k}\right)\\ +{}^{T}\left(\frac{\partial {f}_{\mathit{CP}}}{\partial {Q}_{\mathit{CP}}}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right)\left({Q}_{\mathit{CP}}^{O}+{\mathrm{d}Q}_{\mathit{CP}}-{Q}_{\mathit{CP}}^{ité,k}\right)\end{array}\right\rbrace =0\)
Avec pour commencer la boucle itérative: \(({F}^{ité,0},{Q}_{\mathit{CP}}^{ité,0})=({F}^{élas},{Q}_{\mathit{CP}}^{O})\)
La correction en chargement et l’évolution de l’écrouissage peut être reliée à l’incrément de déplacement plastique \({\mathrm{d}U}_{\mathit{CP}}^{k}\) par les relations suivantes:
\({\mathrm{d}F}^{cor}={K}_{élas}^{O,tan}\cdot {\mathrm{d}U}_{\mathit{CP}}^{k}\) et \({\mathrm{d}Q}_{\mathit{CP}}={I}_{CP}^{O}\cdot {\mathrm{d}U}_{\mathit{CP}}^{k}\)
Où \({I}_{\mathit{CP}}^{O}\text{ }\) est calculée avec les paramètres du début du pas de temps (voir § 1.3 ).
On fait l’hypothèse que l’écoulement plastique est normal à la surface de plasticité, ainsi, on relie l’incrément plastique à la variable d’écoulement plastique \(\mathrm{d}{\lambda}_{\mathit{CP}}^{k}\) :
\({\mathrm{d}U}_{CP}^{k}=\frac{\partial {f}_{\mathit{CP}}}{\partial F}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\mathrm{d}{\lambda}_{\mathit{CP}}^{k}\)
Ainsi on peut écrire obtenir une approximation de l’écoulement plastique:
\(\mathrm{d}{\lambda}_{\mathit{CP}}^{k}=\frac{{f}_{\mathit{CP}}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)+{}^{T}\left(\frac{\partial {f}_{\mathit{CP}}}{\partial F}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right)\left({F}^{élas}-{F}^{ité,k}\right)+{}^{T}\left(\frac{\partial {f}_{\mathit{CP}}}{\partial {Q}_{\mathit{CP}}}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right)\left({Q}_{\mathit{CP}}^{O}-{Q}_{\mathit{CP}}^{ité,k}\right)}{\left({}^{T}\left(\frac{\partial {f}_{\mathit{CP}}}{\partial F}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right){K}_{élas}^{O,tan}-{}^{T}\left(\frac{\partial {f}_{\mathit{CP}}}{\partial {Q}_{\mathit{CP}}}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right){I}_{\mathit{CP}}^{O}\right)\times \left(\frac{\partial {f}_{\mathit{CP}}}{\partial F}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right)}\)
A partir de l’écoulement plastique \(\mathrm{d}{\lambda}_{\mathit{CP}}^{k}\) , on déduit \({\mathrm{d}U}_{\mathit{CP}}^{k}\) , \({\mathrm{d}F}^{cor}\) et \({\mathrm{d}Q}_{\mathit{CP}}\) , on réévalue le critère de rupture:
si \(\left|{f}_{\mathit{CP}}\left({F}^{élas}-{\mathrm{d}F}^{cor},{Q}_{\mathit{CP}}^{O}+{\mathrm{d}Q}_{\mathit{CP}}\right)\right|\le \mathrm{error}\) alors on a atteint la convergence de la correction;
sinon on refait tourner la boucle avec:
\(\left({F}^{ité,k+1},{Q}_{\mathit{CP}}^{ité,k+1}\right)=\left({F}^{élas}-{\mathrm{d}F}^{cor},{Q}_{\mathit{CP}}^{O}+{\mathrm{d}Q}_{\mathit{CP}}\right)\)
Après convergence de la boucle à l’itération «m», on met à jour les paramètres de plasticité liés à la capacité portante:
\({Q}_{\mathit{CP}}^{F}={Q}_{\mathit{CP}}^{ité,m+1},{U}_{\mathit{CP}}^{F}={U}_{\mathit{CP}}^{O}+{\mathrm{d}U}_{\mathit{CP}}^{m},{v}_{z,\mathit{CP}}^{pl,F}={v}_{z,\mathit{CP}}^{pl,O}+\left|\mathrm{d}{U}_{z,\mathit{CP}}^{pl,m+1}\right|\)
On récupère aussi la force à la fin du pas de temps:
\({F}^{F}={F}^{ité,m+1}\)
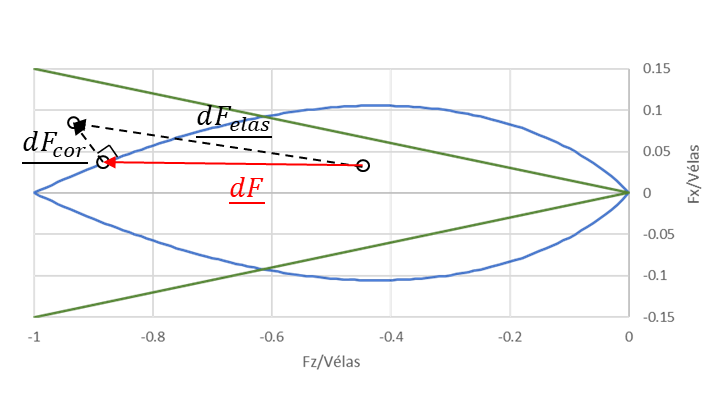
Figure 2.1-2: Illustration du retour sur le critère CP
Si \({f}_{\mathit{CP}}\le 0`et :math:`{f}_{s}>0\)#
Seul le mécanisme de perte de capacité portante est atteint, aucune variable de plasticité liée au glissement ne change:
\({Q}_{\mathit{CP}}^{F}={Q}_{CP}^{O}\text{ },{U}_{\mathit{CP}}^{F}={U}_{\mathit{CP}}^{O},{v}_{z,\mathit{CP}}^{pl,F}={v}_{z,\mathit{CP}}^{pl,O}\)
On résout la situation de la même façon qu’au § 2.1.4.2 , on cherche alors la correction en chargement \({\mathrm{d}F}^{cor}\text{ }\) et l’évolution des variables d’écrouissage \({\mathrm{d}Q}_{sl}\) nécessaire pour revenir sur le critère, à savoir:
\({f}_{sl}({F}^{élas}-{\mathrm{d}F}^{cor},{Q}_{sl}^{O}+\mathrm{d}{Q}_{sl})=0\)
Cette équation est résolue par une boucle itérative jusqu’à convergence, en écrivant à l’itération k le développement limité de cette équation autour du point \(\text{ }({F}^{ité,k},{Q}_{sl}^{ité,k})\) :
\({f}_{s}\left({F}^{élas}-{\mathrm{d}F}^{cor},{Q}_{sl}^{O}+\mathrm{d}{Q}_{sl}\right)\approx \left\lbrace \begin{array}{c}{f}_{s}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\\ +{}^{T}\left(\frac{\partial {f}_{s}}{\partial F}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right)\left({F}^{élas}-{\mathrm{d}F}^{cor}-{F}^{ité,k}\right)\\ +{}^{T}\left(\frac{\partial {f}_{s}}{\partial {Q}_{sl}}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right)\left({Q}_{sl}^{O}+{\mathrm{d}Q}_{sl}-{Q}_{sl}^{ité,k}\right)\end{array}\right\rbrace =0\)
Avec pour commencer la boucle itérative: \(({F}^{ité,0},{Q}_{sl}^{ité,0})=({F}^{élas},{Q}_{sl}^{O})\)
La correction en chargement et l’évolution de l’écrouissage peut être reliée à l’incrément de déplacement plastique \({\mathrm{d}U}_{sl}^{k}\) par les relations suivantes:
\({\mathrm{d}F}^{cor}={K}_{élas}^{O,tan}\cdot {\mathrm{d}U}_{sl}^{k}\) et \({\mathrm{d}Q}_{sl}={H}_{sl}^{O}\cdot {\mathrm{d}U}_{sl}^{k}\)
Où \({H}_{sl}^{O}\text{ }\) est calculée avec les paramètres du début du pas de temps (voir §1.2).
On fait l’hypothèse que l’écoulement plastique est normal à la surface de plasticité, ainsi, on relie l’incrément plastique à la variable d’écoulement plastique \(d{\lambda}_{sl}^{k}\) :
\({\mathrm{d}U}_{sl}^{k}=\frac{\partial {f}_{s}}{\partial F}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\mathrm{d}{\lambda}_{sl}^{k}\)
Ainsi on peut écrire obtenir une approximation de l’écoulement plastique:
\(\mathrm{d}{\lambda}_{sl}^{k}=\frac{{f}_{s}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)+{}^{T}\left(\frac{\partial {f}_{s}}{\partial F}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right)\left({F}^{élas}-{F}^{ité,k}\right)+{}^{T}\left(\frac{\partial {f}_{s}}{\partial {Q}_{sl}}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right)\left({Q}_{\mathit{CP}}^{O}-{Q}_{sl}^{ité,k}\right)}{\left({}^{T}\left(\frac{\partial {f}_{s}}{\partial F}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right){K}_{élas}^{O,tan}-{}^{T}\left(\frac{\partial {f}_{s}}{\partial {Q}_{sl}}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right){H}_{sl}^{O}\right)\times \left(\frac{\partial {f}_{s}}{\partial F}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right)}\)
A partir de l’écoulement plastique \(\mathrm{d}{\lambda}_{\mathit{CP}}^{k}\) , on déduit \({\mathrm{d}U}_{\mathit{CP}}^{k}\) , \({\mathrm{d}F}^{cor}\) et \({\mathrm{d}Q}_{\mathit{CP}}\) , on réévalue le critère de rupture:
si \(\left|{f}_{s}\left({F}^{élas}-{\mathrm{d}F}^{cor},{Q}_{sl}^{O}+{\mathrm{d}Q}_{sl}\right)\right|\le \mathrm{error}\) alors on a atteint la convergence de la correction;
sinon on refait tourner la boucle avec: \(\left({F}^{ité,k+1},{Q}_{sl}^{ité,k+1}\right)=\left({F}^{élas}-{\mathrm{d}F}^{cor},{Q}_{sl}^{O}+{\mathrm{d}Q}_{sl}\right)\)
Après convergence de la boucle à l’itération «m», on met à jour les paramètres de plasticité liés au glissement:
\({Q}_{sl}^{F}={Q}_{sl}^{ité,m+1},{U}_{sl}^{F}={U}_{sl}^{O}+{\mathrm{d}U}_{sl}^{m},{v}_{x,s}^{pl,F}={v}_{x,s}^{pl,O}+\left|\mathrm{d}{U}_{x,s}^{pl,m+1}\right|\text{ },{v}_{y,s}^{pl,F}={v}_{y,s}^{pl,O}+\left|\mathrm{d}{U}_{y,s}^{pl,m+1}\right|\)
On récupère aussi la force à la fin du pas de temps:
\({F}^{F}={F}^{ité,m+1}\)
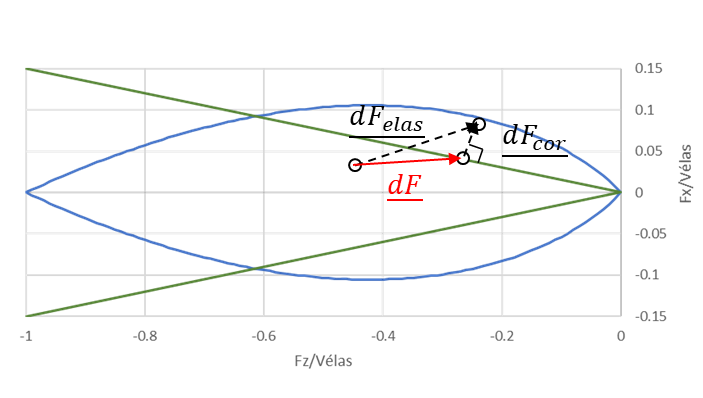
Figure 2.1-3: Illustration du retour sur le critère de glissement
Si \({f}_{\mathit{CP}}>0`et :math:\)>`#
Alors les deux mécanismes de plasticité sont atteints. On résout alors la situation de la même façon qu’aux § 2.1.4.2 et § 2.1.4.3 mais en écrivant les deux critères au lieu d’un, en écrivant à l’itération k le développement limité de cette équation autour du point \(\text{ }\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k},{Q}_{sl}^{ité,k}\right)\) :
\({f}_{\mathit{CP}}\left({F}^{élas}-{\mathrm{d}F}^{cor},{Q}_{\mathit{CP}}^{O}+\mathrm{d}{Q}_{\mathit{CP}}\right)\approx \left\lbrace \begin{array}{c}{f}_{\mathit{CP}}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\\ +{}^{T}\left(\frac{\partial {f}_{\mathit{CP}}}{\partial F}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right)\left(\underline{{F}^{élas}}-{\mathrm{d}F}^{cor}-{F}^{ité,k}\right)\\ +{}^{T}\left(\frac{\partial {f}_{\mathit{CP}}}{\partial {Q}_{\mathit{CP}}}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right)\left({Q}_{\mathit{CP}}^{O}+{\mathrm{d}Q}_{\mathit{CP}}-{Q}_{CP}^{ité,k}\right)\end{array}\right\rbrace =0\)
\({f}_{s}\left({F}^{élas}-{\mathrm{d}F}^{cor},{Q}_{sl}^{O}+\mathrm{d}{Q}_{sl}\right)\approx \left\lbrace \begin{array}{c}{f}_{s}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\\ +{}^{T}\left(\frac{\partial {f}_{s}}{\partial F}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right)\left({F}^{élas}-{\mathrm{d}F}^{cor}-{F}^{ité,k}\right)\\ +{}^{T}\left(\frac{\partial {f}_{s}}{\partial {Q}_{sl}}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right)\left({Q}_{sl}^{O}+{\mathrm{d}Q}_{sl}-{Q}_{sl}^{ité,k}\right)\end{array}\right\rbrace =0\)
Avec pour commencer la boucle itérative: \(({F}^{ité,0},{Q}_{\mathit{CP}}^{ité,k},{Q}_{sl}^{ité,0})=({F}^{élas},{Q}_{CP}^{O},{Q}_{sl}^{O})\)
La correction en chargement et l’évolution de l’écrouissage peut être reliée aux incréments de déplacement plastique \({\mathrm{d}U}_{\mathit{CP}}^{k}\) et \({\mathrm{d}U}_{sl}^{k}\) par les relations suivantes:
\({\mathrm{d}F}^{cor}={K}_{élas}^{O,tan}\left({\mathrm{d}U}_{\mathit{CP}}^{k}+{\mathrm{d}U}_{sl}^{k}\right)\text{ }\) et \({\mathrm{d}Q}_{\mathit{CP}}={\mathrm{I}}_{\mathrm{CP}}^{\mathrm{O}}\cdot {\mathrm{d}U}_{\mathit{CP}}^{k}\) et \({\mathrm{d}Q}_{sl}={H}_{sl}^{O}\cdot {\mathrm{d}U}_{sl}^{k}\)
On fait l’hypothèse que l’écoulement plastique est normal à la surface de plasticité, ainsi, on relie l’incrément plastique aux variables d’écoulement plastique \(\mathrm{d}{\lambda}_{\mathit{CP}}^{k}\) et \(d{\lambda}_{sl}^{k}\) :
\({\mathrm{d}U}_{\mathit{CP}}^{k}=\frac{\partial {f}_{\mathit{CP}}}{\partial F}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\mathrm{d}{\lambda}_{CP}^{k}\text{ }\mathrm{et}\text{ }{\mathrm{d}U}_{sl}^{k}=\frac{\partial {f}_{s}}{\partial F}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\mathrm{d}{\lambda}_{sl}^{k}\)
On obtient ainsi le système:
\(\left(\begin{array}{cc}{m}_{\mathit{CP},\mathit{CP}}& {m}_{s,\mathit{CP}}\\ {m}_{s,\mathit{CP}}& {m}_{s,s}\end{array}\right)\left(\begin{array}{c}\mathrm{d}{\lambda}_{\mathit{CP}}^{k}\\ \mathrm{d}{\lambda}_{sl}^{k}\end{array}\right)=\left(\begin{array}{c}\stackrel{~}{{f}_{\mathit{CP}}^{k}}\\ \stackrel{~}{{f}_{s}^{k}}\end{array}\right)\text{}\mathrm{ou}\text{ }M\times \mathrm{d}{\lambda}^{k}=\stackrel{~}{{f}^{k}}\)
Avec:
\({m}_{\mathit{CP},\mathit{CP}}=\left({}^{T}\left(\frac{\partial {f}_{\mathit{CP}}}{\partial F}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right){K}_{élas}^{O,tan}-{}^{T}\left(\frac{\partial {f}_{\mathit{CP}}}{\partial {Q}_{\mathit{CP}}}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right){I}_{\mathit{CP}}^{O}\right)\times \left(\frac{\partial {f}_{CP}}{\partial F}\left({F}^{ité,k},{Q}_{CP}^{ité,k}\right)\right)\)
\({m}_{s,s}=\left({}^{T}\left(\frac{\partial {f}_{s}}{\partial F}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right){K}_{élas}^{O,tan}-{}^{T}\left(\frac{\partial {f}_{s}}{\partial {Q}_{sl}}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right){H}_{sl}^{O}\right)\times \left(\frac{\partial {f}_{s}}{\partial F}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right)\)
\({m}_{s,CP}={}^{T}\left(\frac{\partial {f}_{\mathit{CP}}}{\partial F}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right){K}_{élas}^{O,tan}\left(\frac{\partial {f}_{s}}{\partial F}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right)\)
\(\stackrel{~}{{f}_{\mathit{CP}}^{k}}={f}_{\mathit{CP}}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)+{}^{T}\left(\frac{\partial {f}_{\mathit{CP}}}{\partial F}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right)\left({F}^{élas}-{F}^{ité,k}\right)+{}^{T}\left(\frac{\partial {f}_{CP}}{\partial {Q}_{\mathit{CP}}}\left({F}^{ité,k},{Q}_{\mathit{CP}}^{ité,k}\right)\right)\left({Q}_{\mathit{CP}}^{O}-{Q}_{\mathit{CP}}^{ité,k}\right)\)
\(\stackrel{~}{{f}_{s}^{k}}={f}_{s}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)+{}^{T}\left(\frac{\partial {f}_{s}}{\partial F}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right)\left({F}^{élas}-{F}^{ité,k}\right)+{}^{T}\left(\frac{\partial {f}_{s}}{\partial {Q}_{sl}}\left({F}^{ité,k},{Q}_{sl}^{ité,k}\right)\right)\left({Q}_{sl}^{O}-{Q}_{sl}^{ité,k}\right)\)
L’inversion de ce système permet d’obtenir les multiplicateurs plastiques \(\mathrm{d}{\lambda}_{\mathit{CP}}^{k}\) et \(\mathrm{d}{\lambda}_{sl}^{k}\) . On en déduit \({\mathrm{d}U}_{\mathit{CP}}^{k}\) , \({\mathrm{d}U}_{sl}^{k}\) , \({\mathrm{d}F}^{cor}\) , \(\mathrm{d}{Q}_{sl}\) et \({\mathrm{d}Q}_{CP}\) , on réévalue les critères de rupture:
Si \(\left|{f}_{\mathit{CP}}\left({F}^{élas}-{\mathrm{d}F}^{cor},{Q}_{\mathit{CP}}^{O}+{\mathrm{d}Q}_{\mathit{CP}}\right)\right|\le \mathrm{error}\) et \(\left|{f}_{s}\left({F}^{élas}-{\mathrm{d}F}^{cor},{Q}_{sl}^{O}+{\mathrm{d}Q}_{sl}\right)\right|\le \mathrm{error}\)
alors on a atteint la convergence de la correction, on vérifie alorsque \(\mathrm{d}{\lambda}_{\mathit{CP}}^{k}>0\) et \(\mathrm{d}{\lambda}_{sl}^{k}>0\) , sinon:
Si \(\mathrm{d}{\lambda}_{\mathit{CP}}^{k}<0\) , alors cela signifie qu’on n’atteint pas la rupture par capacité portante et on effectue le calcul comme un unique critère de glissement (cf. § 1.2 );
Si \(\mathrm{d}{\lambda}_{sl}^{k}<0\) , alors cela signifie qu’on n’atteint pas la rupture par glissement et on effectue le calcul comme un unique critère de capacité portante (cf. § 1.3 );
sinon on refait tourner la boucle avec:
\(\left({F}^{ité,k+1},{Q}_{\mathit{CP}}^{ité,k+1},{Q}_{sl}^{ité,k+1}\right)=\left({F}^{élas}-{\mathrm{d}F}^{cor},{Q}_{\mathit{CP}}^{O}+{\mathrm{d}Q}_{\mathit{CP}},{Q}_{sl}^{O}+{\mathrm{d}Q}_{sl}\right)\)
Après convergence de la boucle à l’itération «m», on met à jour les paramètres de plasticité liés à la capacité portante et au glissement:
\({Q}_{sl}^{F}={Q}_{sl}^{ité,m+1},{U}_{sl}^{F}={U}_{sl}^{O}+{\mathrm{d}U}_{sl}^{m},{v}_{x,s}^{pl,F}={v}_{x,s}^{pl,O}+\left|\mathrm{d}{U}_{x,s}^{pl,m+1}\right|\text{ },{v}_{y,s}^{pl,F}={v}_{y,s}^{pl,O}+\left|\mathrm{d}{U}_{y,s}^{pl,m+1}\right|\)
\({Q}_{\mathit{CP}}^{F}={Q}_{\mathit{CP}}^{ité,m+1},{U}_{\mathit{CP}}^{F}={U}_{\mathit{CP}}^{O}+{\mathrm{d}U}_{\mathit{CP}}^{m},{v}_{z,CP}^{pl,F}={v}_{z,CP}^{pl,O}+\left|\mathrm{d}{U}_{z,CP}^{pl,m+1}\right|\)
On récupère aussi la force à la fin du pas de temps:
\({F}^{F}={F}^{ité,m+1}\)
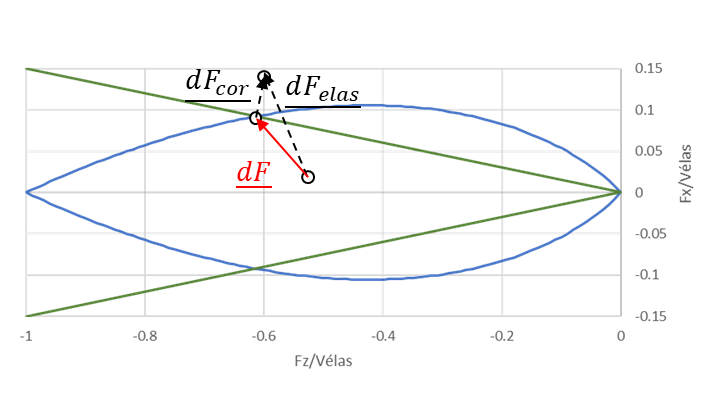
Figure 2.1-4: Illustration du retour sur les deux critères
Paramètres de convergence#
Les paramètres de convergence de la boucle itérative utilisée aux [§ 2.1.4.2 ], [§ 2.1.4.3 ] et [§ 2.1.4.4 ] peuvent être renseignés par l’utilisateur via les mots clés ITER_INTE_MAXI et RESI_INTE_RELA associés au mot-cl facteur COMPORTEMENT:
Le critère de convergence de la boucle est associé à la tolérance de convergence RESI_INTE_RELA et la limite d’élasticité de la loi de comportement \(>\) , tel que
\(\mathrm{error}={V}_{lim}\times \text{RESI\_INTE\_RELA}\)
Le nombre d’itérations de cette boucle ne peut dépasser ITER_INTE_MAXI (qui doit être supérieur à 0). Si le nombre d’itérations est dépassé, l’algorithme du comportement renvoie une erreur et une subdivision du pas de temps est appliquée si cette option est activée (via DEFI_LIST_INST). Il est d’ailleurs fortement recommandée d’activer la division automatique du pas de temps afin de s’assurer de la convergence du calcul.
On vérifie par ailleurs dans le calcul que la valeur de l’écrouissage isotrope est exacte à savoir à l’itération k que:
\(\begin{array}{c}{R}^{k}=\left({V}_{ult}-{V}_{lim}\right)\left(\frac{{v}_{z,CP}^{pl,k}}{{v}_{z,\mathit{CP}}^{pl,k}+{v}_{r,\mathit{CP}}^{pl}}\right)\end{array}\)
Sinon on effectue une itération supplémentaire en remplaçant dans \({I}_{\mathit{CP}}^{O}\) , le terme \(\frac{\partial R}{\partial {U}_{z,\mathit{CP}}^{pl}}\) par:
\(\frac{\Delta R}{\Delta {U}_{z,\mathit{CP}}^{pl}}=\frac{\left({V}_{ult}-{V}_{lim}\right)\left(\frac{{v}_{z,\mathit{CP}}^{pl,k}}{{v}_{z,\mathit{CP}}^{pl,k}+{v}_{r,\mathit{CP}}^{pl}}\right)-{R}^{O}}{{U}_{z,\mathit{CP}}^{pl,k}-{U}_{z,\mathit{CP}}^{pl,O}}\)
Gestion des points d’inflexion#
Le critère de capacité portante, présente deux points d’inflexion et le critère de glissement présente un point d’inflexion. Au niveau de ces points d’inflexion, les méthodes de résolution des paragraphes précédents ne sont pas suffisantes, il faut alors séparer le critère en plusieurs sous-critères afin de pouvoir converger sur les points d’inflexion comme le montre la figure ci-dessous:
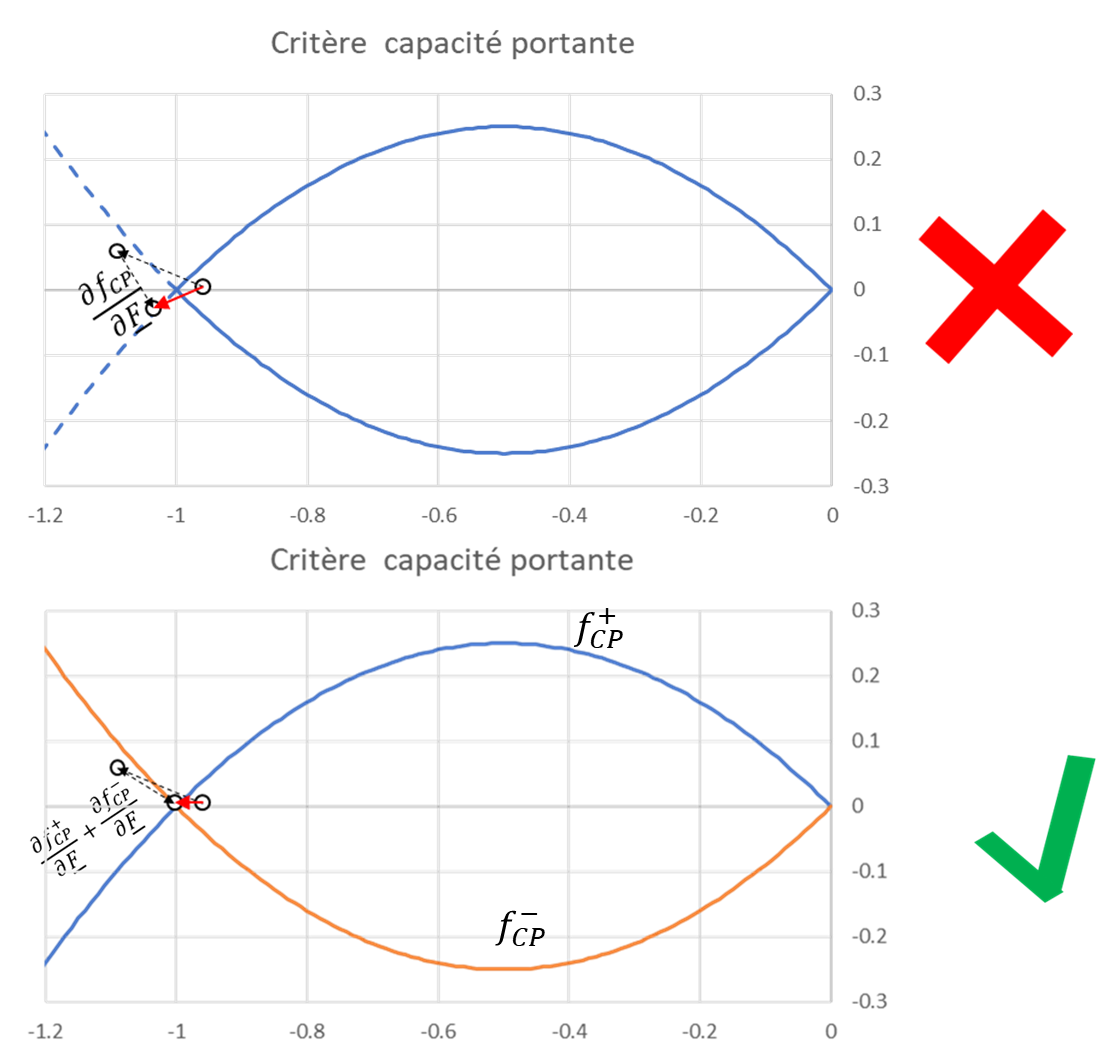
Figure 2.1-5: Illustration de la décomposition en deux sous-critères au niveau des points d’inflexion
Ainsi, pour gérer le critère de capacité portante, il convient de considérer 4 sous-critères:
Le critère normal:
\({f}_{\mathit{CP}}^{+++\rbrace =-{F}_{z}-\overline{V}{\left(1+\frac{\sqrt{{\overline{{F}_{x}}}^{2}+{\overline{{F}_{y}}}^{2}}}{{F}_{z}}\right)}^{3}\left(1+\delta \left(\overline{{M}_{x}^{O}}\right)\frac{2\overline{{M}_{x}}}{{L}_{y}{F}_{z}}\right)\left(1+\delta \left(\overline{{M}_{y}^{O}}\right)\frac{2\overline{{M}_{y}}}{{L}_{x}{F}_{z}}\right)\)
Avec: \(\text{ }\overline{{F}_{x}}={F}_{x}-{R}_{h,x},\text{ }\overline{{F}_{y}}={F}_{y}-{R}_{h,y},\text{ }\overline{{M}_{x}}={M}_{x}-{R}_{m,x},\text{ }\overline{{M}_{y}}={M}_{y}-{R}_{m,y},\text{ }\)
\(\delta \left(\overline{{M}_{x}^{O}}\right)=\lbrace \begin{array}{c}+1\text{ }\mathrm{si}\text{ }\overline{{M}_{x}^{O}}={M}_{x}^{O}-{R}_{r,x}^{O}>0\text{ }\text{au début du pas de temps}\\ -1\text{ }\mathrm{si}\text{ }\overline{{M}_{x}^{O}}={M}_{x}^{O}-{R}_{r,x}^{O}<0\text{ }\text{au début du pas de temps}\end{array}\)
\(\delta \left(\overline{{M}_{y}^{O}}\right)=\lbrace \begin{array}{c}+1\text{ }\mathrm{si}\text{ }\overline{{M}_{y}^{O}}={M}_{y}^{O}-{R}_{r,y}^{O}>0\text{ }\text{au début du pas de temps}\\ -1\text{ }\mathrm{si}\text{ }\overline{{M}_{y}^{O}}={M}_{y}^{O}-{R}_{r,y}^{O}<0\text{ }\text{au début du pas de temps}\end{array}\)
Le critère avec inversion de la force horizontale:
\({f}_{\mathit{CP}}^{H-\rbrace =-{F}_{z}-\overline{V}{\left(1-\frac{\sqrt{{\overline{{F}_{x}}}^{2}+{\overline{{F}_{y}}}^{2}}}{{F}_{z}}\right)}^{3}\left(1+\delta \left(\overline{{M}_{x}^{O}}\right)\frac{2\overline{{M}_{x}}}{{L}_{y}{F}_{z}}\right)\left(1+\delta \left(\overline{{M}_{y}^{O}}\right)\frac{2\overline{{M}_{y}}}{{L}_{x}{F}_{z}}\right)\)
Le critère avec inversion du moment selon x:
\({f}_{\mathit{CP}}^{Mx-\rbrace =-{F}_{z}-\overline{V}{\left(1+\frac{\sqrt{{\overline{{F}_{x}}}^{2}+{\overline{{F}_{y}}}^{2}}}{{F}_{z}}\right)}^{3}\left(1-\delta \left(\overline{{M}_{x}^{O}}\right)\frac{2\overline{{M}_{x}}}{{L}_{y}{F}_{z}}\right)\left(1+\delta \left(\overline{{M}_{y}^{O}}\right)\frac{2\overline{{M}_{y}}}{{L}_{x}{F}_{z}}\right)\)
Le critère avec inversion du moment selon y:
\({f}_{\mathit{CP}}^{My-\rbrace =-{F}_{z}-\overline{V}{\left(1+\frac{\sqrt{{\overline{{F}_{x}}}^{2}+{\overline{{F}_{y}}}^{2}}}{{F}_{z}}\right)}^{3}\left(1+\delta \left(\overline{{M}_{x}^{O}}\right)\frac{2\overline{{M}_{x}}}{{L}_{y}{F}_{z}}\right)\left(1-\delta \left(\overline{{M}_{y}^{O}}\right)\frac{2\overline{{M}_{y}}}{{L}_{x}{F}_{z}}\right)\)
Pour gérer le critère de glissement, il convient de considérer 2 sous-critères:
Le critère normal:
\({f}_{s}^{+\rbrace =\sqrt{{\left({F}_{x}-{q}_{hx}\right)}^{2}+{\left({F}_{y}-{q}_{hy}\right)}^{2}}+{F}_{z}\tan({\varphi}_{inter})-{c}_{inter}{A}^{'}\)
Le critère avec inversion de la force horizontale:
\({f}_{s}^{-\rbrace =-\sqrt{{\left({F}_{x}-{q}_{hx}\right)}^{2}+{\left({F}_{y}-{q}_{hy}\right)}^{2}}+{F}_{z}\tan({\varphi}_{inter})-{c}_{inter}{A}^{'}\)
Le système est alors résolu comme un multicritère de la même façon qu’au § 2.1.4.4 .
Gestion de la convergence à l’origine#
L’écriture du critère de capacité portante et la résolution de l’écoulement plastique associé indiqué au § 1.3 n’est possible que si:
\(>\)
\(>\)
\(>\)
Dans le cas contraire, le tir élastique a dépassé la limite de définition du critère de rupture et on a divergence de l’algorithme de résolution comme illustré sur la figure ci-dessous:
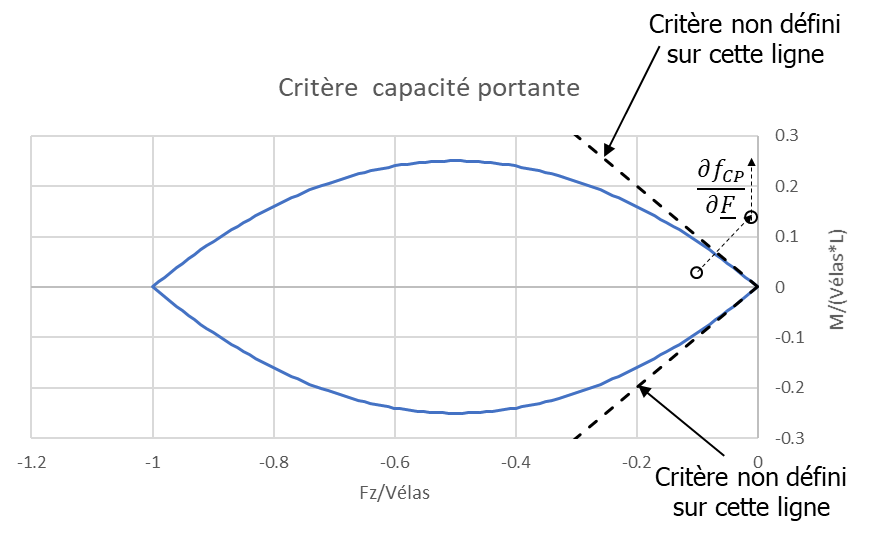
Figure 2.1-6: Illustration de la décomposition en deux sous-critères au niveau des points d’inflexion
Pour éviter cette divergence, il suffirait de diminuer le pas de temps pour éviter que le tir élastique ne soit trop éloigné du critère et pour assurer la convergence de l’algorithme, ce qui est fait dans le code. Cependant au niveau de l’origine \(>\) , la frontière entre le critère et la zone limite de convergence est très/trop faible et il faudrait un pas de temps tendant vers 0 pour assurer la convergence. Pour résoudre le problème, le critère est linéariséà partir de \(>\) :
Dans le cas d’un chargement principalement en rotation \(>\) ;
Dans le cas d’un chargement principalement horizontal \(>\) ;
Le critère de capacité portante est alors transformé en 3 critères linéarisés:
Selon la force horizontale:
\({f}_{\mathit{CP},lin}^{H}={\left(1-\frac{{l}_{in}}{\left(1-\frac{2\left({M}_{x}-{R}_{m,x}\right)}{{l}_{in}{L}_{y}\left({V}_{lim}+R\right)}\right)\left(1-\frac{2\left({M}_{y}-{R}_{m,y}\right)}{{l}_{in}{L}_{x}\left({V}_{lim}+R\right)}\right)}\right)}^{\frac{1}{3}}{F}_{z}+\sqrt{{\left({F}_{x}-{R}_{h,x}\right)}^{2}+{\left({F}_{y}-{R}_{h,y}\right)}^{2}}\)
Selon le moment en x:
\({f}_{\mathit{CP},lin}^{Mx}=\left(1-\frac{{l}_{in}}{{\left(1-\frac{2\sqrt{{\left({F}_{x}-{R}_{h,x}\right)}^{2}+{\left({F}_{y}-{R}_{h,y}\right)}^{2}}}{{l}_{in}{L}_{y}\left({V}_{lim}+R\right)}\right)}^{3}\left(1-\frac{2\left({M}_{y}-{R}_{m,y}\right)}{{l}_{in}{L}_{x}\left({V}_{lim}+R\right)}\right)}\right){L}_{y}{F}_{z}+2\left|{M}_{x}-{R}_{m,x}\right|\)
Selon le moment en y:
\({f}_{\mathit{CP},lin}^{My}=\left(1-\frac{{l}_{in}}{{\left(1-\frac{2\sqrt{{\left({F}_{x}-{R}_{h,x}\right)}^{2}+{\left({F}_{y}-{R}_{h,y}\right)}^{2}}}{{l}_{in}{L}_{y}\left({V}_{lim}+R\right)}\right)}^{3}\left(1-\frac{2\left({M}_{x}-{R}_{m,x}\right)}{{l}_{in}{L}_{x}\left({V}_{lim}+R\right)}\right)}\right){L}_{x}{F}_{z}+2\left|{M}_{y}-{R}_{m,y}\right|\)
Afin de gérer le point d’inflexion en \(>\) , ces sous-critères sont eux-mêmes subdivisés en deux:
Pour le critère linéarisé selon la force horizontale:
\({f}_{\mathit{CP},lin}^{H+\rbrace ={\left(1-\frac{{l}_{in}}{\left(1-\frac{2\left({M}_{x}-{R}_{m,x}\right)}{{l}_{in}{L}_{y}\left({V}_{lim}+R\right)}\right)\left(1-\frac{2\left({M}_{y}-{R}_{m,y}\right)}{{l}_{in}{L}_{x}\left({V}_{lim}+R\right)}\right)}\right)}^{\frac{1}{3}}{F}_{z}+\sqrt{{\left({F}_{x}-{R}_{h,x}\right)}^{2}+{\left({F}_{y}-{R}_{h,y}\right)}^{2}}\)
\(\mathrm{et}\text{ }{f}_{\mathit{CP},lin}^{H-\rbrace ={\left(1-\frac{{l}_{in}}{\left(1-\frac{2\left({M}_{x}-{R}_{m,x}\right)}{{l}_{in}{L}_{y}\left({V}_{lim}+R\right)}\right)\left(1-\frac{2\left({M}_{y}-{R}_{m,y}\right)}{{l}_{in}{L}_{x}\left({V}_{lim}+R\right)}\right)}\right)}^{\frac{1}{3}}{F}_{z}-\sqrt{{\left({F}_{x}-{R}_{h,x}\right)}^{2}+{\left({F}_{y}-{R}_{h,y}\right)}^{2}}\)
Pour le critère linéarisé selon le moment en x:
\({f}_{\mathit{CP},lin}^{Mx+\rbrace =\left(1-\frac{{l}_{in}}{{\left(1-\frac{2\sqrt{{\left({F}_{x}-{R}_{h,x}\right)}^{2}+{\left({F}_{y}-{R}_{h,y}\right)}^{2}}}{{l}_{in}{L}_{y}\left({V}_{lim}+R\right)}\right)}^{3}\left(1-\frac{2\left({M}_{y}-{R}_{m,y}\right)}{{l}_{in}{L}_{x}\left({V}_{lim}+R\right)}\right)}\right){L}_{y}{F}_{z}+2\delta \left(\overline{{M}_{x}^{O}}\right)\left({M}_{x}-{R}_{m,x}\right)\)
\(\mathrm{et}\text{ }{f}_{\mathit{CP},lin}^{Mx-\rbrace =\left(1-\frac{{l}_{in}}{{\left(1-\frac{2\sqrt{{\left({F}_{x}-{R}_{h,x}\right)}^{2}+{\left({F}_{y}-{R}_{h,y}\right)}^{2}}}{{l}_{in}{L}_{y}\left({V}_{lim}+R\right)}\right)}^{3}\left(1-\frac{2\left({M}_{y}-{R}_{m,y}\right)}{{l}_{in}{L}_{x}\left({V}_{lim}+R\right)}\right)}\right){L}_{y}{F}_{z}-2\delta \left(\overline{{M}_{x}^{O}}\right)\left({M}_{x}-{R}_{m,x}\right)\)
\(\delta \left(\overline{{M}_{x}^{O}}\right)=\lbrace \begin{array}{c}+1\text{ }\mathrm{si}\text{ }\overline{{M}_{x}^{O}}={M}_{x}^{O}-{R}_{r,x}^{O}>0\text{ }\text{au début du pas de temps}\\ -1\text{ }\mathrm{si}\text{ }\overline{{M}_{x}^{O}}={M}_{x}^{O}-{R}_{r,x}^{O}<0\text{ }\text{au début du pas de temps}\end{array}\)
Pour le critère linéarisé selon le moment en y:
\({f}_{\mathit{CP},lin}^{My+\rbrace =\left(1-\frac{{l}_{in}}{{\left(1-\frac{2\sqrt{{\left({F}_{x}-{R}_{h,x}\right)}^{2}+{\left({F}_{y}-{R}_{h,y}\right)}^{2}}}{{l}_{in}{L}_{y}\left({V}_{lim}+R\right)}\right)}^{3}\left(1-\frac{2\left({M}_{x}-{R}_{m,x}\right)}{{l}_{in}{L}_{y}\left({V}_{lim}+R\right)}\right)}\right){L}_{x}{F}_{z}+2\delta \left(\overline{{M}_{y}^{O}}\right)\left({M}_{y}-{R}_{m,y}\right)\)
\(\mathrm{et}\text{ }{f}_{\mathit{CP},lin}^{My-\rbrace =\left(1-\frac{{l}_{in}}{{\left(1-\frac{2\sqrt{{\left({F}_{x}-{R}_{h,x}\right)}^{2}+{\left({F}_{y}-{R}_{h,y}\right)}^{2}}}{{l}_{in}{L}_{y}\left({V}_{lim}+R\right)}\right)}^{3}\left(1-\frac{2\left({M}_{x}-{R}_{m,x}\right)}{{l}_{in}{L}_{y}\left({V}_{lim}+R\right)}\right)}\right){L}_{x}{F}_{z}-2\delta \left(\overline{{M}_{y}^{O}}\right)\left({M}_{y}-{R}_{m,y}\right)\)
\(\delta \left(\overline{{M}_{y}^{O}}\right)=\lbrace \begin{array}{c}+1\text{ }\mathrm{si}\text{ }\overline{{M}_{y}^{O}}={M}_{y}^{O}-{R}_{r,y}^{O}>0\text{ }\text{au début du pas de temps}\\ -1\text{ }\mathrm{si}\text{ }\overline{{M}_{y}^{O}}={M}_{y}^{O}-{R}_{r,y}^{O}<0\text{ }\text{au début du pas de temps}\end{array}\)
Le système est alors résolu comme un multicritère de la même façon qu’au § 2.1.4.4 .
Détermination de la matrice tangente#
Données d’entrées#
En plus des paramètres de la loi de comportement, on dispose en entrée des variables obtenues à la fin ou au début du pas de temps (on n’utilisera donc pas la notation F ou O) dont le calcul est présenté au § 2.1 :
la force globale: \(F={}^{T}\left({F}_{x},{F}_{y},{F}_{z},{M}_{x},{M}_{y},{M}_{z}\right)\)
des variables d’écrouissage en glissement: \({Q}_{sl}={}^{T}\left({q}_{hx},{q}_{hy}\right)\)
du déplacement plastique en glissement: \({U}_{sl}={}^{T}\left({U}_{x,s}^{pl},{U}_{y,s}^{pl},{U}_{z,s}^{pl},{\theta}_{x,s}^{pl},{\theta}_{y,s}^{pl}\right)\)
des variables d’écrouissage en capacité portante: \({Q}_{CP}={}^{T}\left({R}_{h,x},{R}_{h,y},R\text{ },{R}_{m,x},\text{ }{R}_{m,y}\right)\)
du déplacement plastique en capacité portante: \({U}_{\mathit{CP}}={}^{T}\left({U}_{x,\mathit{CP}}^{pl},{U}_{y,\mathit{CP}}^{pl},{U}_{z,\mathit{CP}}^{pl},{\theta}_{x,\mathit{CP}}^{pl},{\theta}_{y,\mathit{CP}}^{pl}\right)\)
des variables internes en glissement et en capacité portante: \({v}_{x,s}^{pl}\) , \({v}_{y,s}^{pl}\) et \({v}_{z,\mathit{CP}}^{pl}\)
Ainsi que toutes leurs différenciellesdifférentielles associées \(\mathrm{d}F,\text{}\mathrm{d}{Q}_{sl},\text{ }\mathrm{d}{Q}_{\mathit{CP}},\mathrm{d}{U}_{sl},\text{ }\mathrm{d}{U}_{\mathit{CP}}\)
la variable interne \({d}^{état}\) qui indique quels critères ont été atteints pendant le calcul de l’incrément de chargement, qui permet d’avoir tous les critères atteints prenant en compte la gestion de la convergence à l’origine (§ 2.1.4.7 ) et les sous critères pour la gestion des points d’inflexions (§ 2.1.4.6 ).
Constitution de la matrice tangente#
Si \(>\)#
Alors aucun mécanisme de plasticité n’est atteint ce qui correspond au § 2.1.4.1 , la fondation est dans le domaine élastique. A partir de la force globale \(F\) , les raideurs élastique tangente en rotation selon x \({K}_{\mathit{rx},\mathit{rx}}^{tan}\) et y \({K}_{\mathit{ry},\mathit{ry}}^{tan}\) sont calculées avec la formulation vue au [§ 1.4 ] ainsi on obtient la matrice de raideur élastique tangente qui est dans le cas de \(>\) la matrice tangente:
\(K={K}_{élas}^{tan}=\left(\begin{array}{cccccc}{K}_{xx}^{ini}& 0& 0& 0& 0& 0\\ 0& {K}_{yy}^{ini}& 0& 0& 0& 0\\ 0& 0& {K}_{zz}^{ini}& 0& 0& 0\\ 0& 0& 0& {K}_{\mathit{rx},\mathit{rx}}^{tan}& 0& 0\\ 0& 0& 0& 0& {K}_{\mathit{ry},\mathit{ry}}^{tan}& 0\\ 0& 0& 0& 0& 0& {K}_{\mathit{rz},\mathit{rz}}^{ini}\end{array}\right)\)
Si \(>\)#
La lecture de \({d}^{état}\text{ }\) permet de savoir quels critères de rupture ont été atteints lors de la phase de chargement précédente. On note ici, qu’il y a eu \({n}_{s}\) sous-critères de rupture par glissement atteints (en prenant en compte l’éventuel point d’inflexion présenté au § 2.1.4.6 ) noté \({f}_{s}^{i\in ⟦1,ns⟧}\) (avec \({\lambda}_{s}^{i}\) le multiplicateur plastique associé) et \({n}_{\mathit{CP}}\) sous-critères de rupture par capacité portante atteints (en prenant en compte les points d’inflexion présenté au § 2.1.4.6 ainsi que la gestion de la convergence à l’origine présenté au § 2.1.4.7 ) noté \({f}_{\mathit{CP}}^{j\in ⟦1,{n}_{\mathit{CP}}⟧}\) (avec \({\lambda}_{\mathit{CP}}^{j}\) le multiplicateur plastique associé).
Pour chaque sous-critère, on a:
\({f}_{s}^{i}=0,\text{ }\mathrm{d}{f}_{s}^{i}={}^{T}\left(\frac{\partial {f}_{s}^{i}}{\partial F}\right)\mathrm{d}F+{}^{T}\left(\frac{\partial {f}_{s}^{i}}{\partial {Q}_{sl}}\right)\mathrm{d}{Q}_{sl}=0\text{ }\mathrm{et}\text{ }{f}_{\mathit{CP}}^{j}=0,\text{}\mathrm{d}{f}_{\mathit{CP}}^{j}={}^{T}\left(\frac{\partial {f}_{\mathit{CP}}^{j}}{\partial F}\right)\mathrm{d}F+{}^{T}\left(\frac{\partial {f}_{\mathit{CP}}^{j}}{\partial {Q}_{\mathit{CP}}}\right)\mathrm{d}{Q}_{\mathit{CP}}=0\)
En posant les relations suivantes:
\(\mathrm{d}F={K}_{élas}^{tan}\cdot \mathrm{d}{U}_{élas}={K}_{élas}^{tan}\left(\mathrm{d}U-\mathrm{d}{U}_{s}-\mathrm{d}{U}_{\mathit{CP}}\right),\text{ }\mathrm{d}{Q}_{sl}={H}_{sl}\cdot \mathrm{d}{U}_{sl},\text{ }\mathrm{d}{Q}_{\mathit{CP}}={I}_{\mathit{CP}}\cdot \mathrm{d}{U}_{\mathit{CP}}\)
On note les écoulements plastiques:
\(\mathrm{d}{U}_{sl}=\sum_{i=1}^{i={n}_{s}}\frac{\partial {f}_{s}^{i}}{\partial F}\mathrm{d}{\lambda}_{sl}^{i}\text{ }\mathrm{et}\text{ }\mathrm{d}{U}_{CP}=\sum_{j=1}^{j={n}_{CP}}\frac{\partial {f}_{\mathit{CP}}^{j}}{\partial F}\mathrm{d}{\lambda}_{\mathit{CP}}^{j}\)
On arrive au système suivant:
\(\left(\begin{array}{cc}{M}_{sl,sl}^{K}& {M}_{sl,\mathit{CP}}^{K}\\ {}^{T}\left({M}_{sl,\mathit{CP}}^{K}\right)& {M}_{\mathit{CP},\mathit{CP}}^{K}\end{array}\right)\left(\begin{array}{c}{\mathrm{d}\lambda }_{\mathrm{s}l}^{i\in \left(1,\mathrm{n}\mathrm{s}\right)}\text{ }\\ {\mathrm{d}\lambda }_{CP}^{j\in \left(1,{n}_{CP}\right)}\text{ }\end{array}\right)=\left(\begin{array}{c}{}^{T}\left(\frac{\partial {f}_{s}^{i\in \left(1,ns\right)}}{\partial F}\right)\\ {}^{T}\left(\frac{\partial {f}_{\mathit{CP}}^{j\in \left(1,{n}_{\mathit{CP}}\right)}}{\partial F}\right)\end{array}\right){K}_{élas}^{tan}\mathrm{d}U\text{ }\mathrm{ou}\text{ }{M}^{K}\mathrm{d}\lambda ={}^{T}\left(\frac{\partial f}{\partial F}\right){K}_{élas}^{tan}\mathrm{d}U\)
Avec:
\({\left({M}_{sl,sl}^{K}\right)}_{(i,j)\in {⟦1,ns⟧}^{2}}={}^{T}\left(\frac{\partial {f}_{s}^{i}}{\partial F}\right){K}_{élas}^{tan}\left(\frac{\partial {f}_{s}^{j}}{\partial F}\right)-{}^{T}\left(\frac{\partial {f}_{s}^{i}}{\partial {Q}_{sl}}\right){H}_{sl}\left(\frac{\partial {f}_{s}^{j}}{\partial F}\right)\)
\({\left({M}_{sl,\mathit{CP}}^{K}\right)}_{(i,j)\in \left(1,{n}_{s}\right)\times \left(1,{n}_{\mathit{CP}}\right)}={}^{T}\left(\frac{\partial {f}_{s}^{i}}{\partial F}\right){K}_{élas}^{tan}\left(\frac{\partial {f}_{\mathit{CP}}^{j}}{\partial F}\right)\)
\({\left({M}_{\mathit{CP},\mathit{CP}}^{K}\right)}_{(i,j)\in {\left(1,{n}_{\mathit{CP}}\right)}^{2}}={}^{T}\left(\frac{\partial {f}_{\mathit{CP}}^{i}}{\partial F}\right){K}_{élas}^{tan}\left(\frac{\partial {f}_{\mathit{CP}}^{j}}{\partial F}\right)-{}^{T}\left(\frac{\partial {f}_{\mathit{CP}}^{i}}{\partial {Q}_{\mathit{CP}}}\right){I}_{\mathit{CP}}\left(\frac{\partial {f}_{CP}^{j}}{\partial F}\right)\)
Par simplification \(\left(\begin{array}{c}{\mathrm{d}\lambda }_{sl}^{i\in \left(1,ns\right)}\text{ }\\ {\mathrm{d}\lambda }_{\mathit{CP}}^{j\in \left(1,{n}_{\mathit{CP}}\right)}\text{ }\end{array}\right)=\mathrm{d}\lambda\) et \(\left(\begin{array}{c}{}^{T}\left(\frac{\partial {f}_{s}^{i\in \left(1,ns\right)}}{\partial F}\right)\\ {}^{T}\left(\frac{\partial {f}_{\mathit{CP}}^{j\in \left(1,{n}_{\mathit{CP}}\right)}}{\partial F}\right)\end{array}\right)={}^{T}\left(\frac{\partial f}{\partial F}\right)\)
Ce système est par la suite inversé:
\({\left({M}^{K}\right)}^{-1}={\left(\begin{array}{cc}{M}_{sl,sl}^{K}& {M}_{sl,\mathit{CP}}^{K}\\ {}^{T}\left({M}_{sl,\mathit{CP}}^{K}\right)& {M}_{\mathit{CP},\mathit{CP}}^{K}\end{array}\right)}^{-1}=\left(\begin{array}{cc}{S}_{sl,sl}^{K}& {S}_{sl,\mathit{CP}}^{K}\\ {}^{T}\left({S}_{sl,\mathit{CP}}^{K}\right)& {S}_{\mathit{CP},\mathit{CP}}^{K}\end{array}\right)={S}^{K}\)
On obtient ainsi l’expression de l’écoulement plastique:
\(\mathrm{d}\lambda ={S}^{K}{}^{T}\left(\frac{\partial f}{\partial F}\right){K}_{élas}^{tan}\mathrm{d}U\)
En repartant de la relation entre force et déplacement élastique:
\(\mathrm{d}F={K}_{élas}^{tan}\mathrm{d}{U}_{élas}={K}_{élas}^{tan}\left(\mathrm{d}U-\sum_{i=1}^{i=ns}\frac{\partial {f}_{s}^{i}}{\partial F}\mathrm{d}{\lambda}_{sl}^{i}-\sum_{j=1}^{j={n}_{\mathit{CP}}}\frac{\partial {f}_{\mathit{CP}}^{j}}{\partial F}\mathrm{d}{\lambda}_{\mathit{CP}}^{j}\right)={K}_{élas}^{tan}\left(\mathrm{d}U-\left(\frac{\partial f}{\partial F}\right)\mathrm{d}\lambda \right)\)
Ainsi on peut écrire:
\(\mathrm{d}F=\left({K}_{élas}^{tan}-{K}_{élas}^{tan}\left(\frac{\partial f}{\partial F}\right){S}^{K}{}^{T}\left(\frac{\partial f}{\partial F}\right){K}_{élas}^{tan}\right)\mathrm{d}U\)
Après inversion de \({M}^{K}\) , le programme retourne donc la matrice plastique tangente:
\({K}^{tan}={K}_{élas}^{tan}-{K}_{élas}^{tan}\left(\frac{\partial f}{\partial F}\right){S}^{K}{}^{T}\left(\frac{\partial f}{\partial F}\right){K}_{élas}^{tan}\)
Récapitulatif des paramètres de la loi de comportement#
Les paramètres de la loi de comportement sont entrés comme données sous le mot clé FONDA_SUPERFI de la commande DEFI_MATERIAU [U4.43.01]:
LONG_X: Correspond à la longueur \(>\) selon l’axe local x de la fondation (obligatoire);
LONG_Y: Correspond à la longueur \(>\) selon l’axe local y de la fondation(obligatoire) ;
PHI: Correspond à l’angle de frottement \(>\) en degré à l’interface sol/fondation (obligatoire);
COHESION: Correspond à la cohésion \(>\) à l’interface sol/fondation (homogène à une raideur en translation, facultatif) ;
RAID_GLIS: Correspond à la raideur de l’écrouissage du glissement \(>\) (facultatif) ;
GAMMA_REFE: Paramètre \(>\) de l’écrouissage cinématique (homogène à l’inverse d’une distance, facultatif);
CP_SERVICE: Correspond à la force limite d’élasticité \(>\) de la fondation (obligatoire);
CP_ULTIME: Correspond à la force limite ultime \(>\) de la fondation (facultatif);
DEPL_REFE: Tassement de référence \({v}_{r,\mathit{CP}}^{pl}\) pour l’écrouissage isotrope du critère de capacité portante (facultatif);
RAID_CP_X: Correspond à la raideur de l’écrouissage cinématique en translation selon x du critère de capacité portante \(>\) (homogène à une raideur en translation, facultatif) ;
GAMMA_CP_X: Paramètre \(>\) de l’écrouissage cinématique en translation selon x du critère de capacité portante (homogène à l’inverse d’une distance, facultatif) ;
RAID_CP_Y, GAMMA_CP_Y: Raideur \(>\) et paramètre \(>\) de l’écrouissage cinématique en translation selon y (facultatifs);
RAID_CP_RX, GAMMA_CP_RX: Raideur \(>\) et paramètre \(>\) de l’écrouissage cinématique en rotation selon x (facultatifs);
RAID_CP_RY, GAMMA_CP_RY: Raideur \(>\) et paramètre \(>\) de l’écrouissage cinématique en rotation selon y(facultatifs) ;
DECOLLEMENT: Paramètre d’activation du mécanisme de décollement si égal à ‘OUI’. (Facultatif et par défaut ‘NON’)
Excepté DECOLLEMENT, tous les paramètres facultatifs sont par défaut égaux à 0.
Nota: A ces paramètres vient s’ajouter la matrice de rigidité initiale associée à l’élément discret qui doit être définit symétrique diagonale dans le repère local de l’élément discret (K_TR_D_N).
Récapitulatif des variables internes de la loi de comportement#
La loi de comportement comporte 21 variables internes par point de calcul:
V1 à V5: Le déplacement plastique associé au critère de glissement aussi nommé:
DASLXpour la translation selon x \({U}_{x,s}^{pl}\) ;
DASLYpour la translation selon y \({U}_{y,s}^{pl}\) ;
DASLZpour la translation selon z \({U}_{z,s}^{pl}\) ;
DASLRXpour la rotation selon x \({\theta}_{x,s}^{pl}\) ;
DASLRYpour la rotation selon y \({\theta}_{y,s}^{pl}\) ;
V6 à V10:Le déplacement plastique associé au critère de capacité portante aussi nommé:
DACPXpour la translation selon x \({U}_{x,CP}^{pl}\) ;
DACPYpour la translation selon y \({U}_{y,CP}^{pl}\) ;
DACPZpour la translation selon z \({U}_{z,CP}^{pl}\) ;
DACPRXpour la rotation selon x \({\theta}_{x,CP}^{pl}\) ;
DACPRYpour la rotation selon y \({\theta}_{y,CP}^{pl}\) ;
V11 et V12:L’écrouissage associé au critère de glissement aussi nommé:
DAQSLXpour la translation selon x \({q}_{hx}\) ;
DAQSLYpour la translation selon y \({q}_{hy}\) ;
V13 à V17: L’écrouissage associé au critère de capacité portante aussi nommé:
DAQCPXpour l’écrouissage cinématique de la translation selon x \({R}_{h,x}\) ;
DAQCPYpour l’écrouissage cinématique de la translation selon y \({R}_{h,y}\) ;
DARCPpour l’écrouissage isotrope \(R\text{ }\) ;
DAQCPRXpour l’écrouissage cinématique de la rotation selon x \({R}_{r,x}\) ;
DAQCPRYpour l’écrouissage cinématique de la rotation selon y \({R}_{r,y}\) ;
V18: DAUTRE correspondant à l’état de plasticité de l’élément \(>\) (cf. §2.2.1):
V19 à V21: Les variables intermédiaires des écrouissages des critères de rupture aussi nommés:
DABSSLXpour l’écrouissage cinématique de la translation selon x \({v}_{x,s}^{pl}\) ;
DABSSLYpour l’écrouissage cinématique de la translation selon y \({v}_{y,s}^{pl}\) ;
DABSCPZpour les écrouissages du critère de capacité portante \({v}_{z,\mathit{CP}}^{pl}\text{ }\) ;
Références bibliographiques#
ABBOUD: «Développement d’un macroélément pour l’étude des fondations superficielles sous charge sismique» Thèse de Doctorat, Paris: Université Paris-Est, 2017
Description des versions du document#
Version code_a ster |
Auteur(s) Organisme(s) |
Description des modifications |
15.2 |
|
Texte initial |
15.2 |
|
Reprise de forme des équations |