v2.03.114 SDLS114 - Calcul des facteurs d’intensité de contrainte d’une plaque fissurée par recombinaison modale#
Résumé
Ce test vise à valider le calcul des facteurs d’intensité d’une plaque fissurée par recombinaison modale. Les facteurs d’intensité modaux, donc associés à chaque mode propre de vibration de la structure, sont calculés avec les opérateur CALC_G, option K (en FEM) et CALC_G_XFEM, option CALC_K_G(en X-FEM). Les modélisations illustrent la possibilité de combiner les facteurs d’intensité modaux directement dans le fichier de commande par des instructions python via l’opérateur POST_K_TRANS.
Ce test contient deux modélisations 2D (modélisation A et C) et deux modélisations 3D (B et D). La solution de référence est issue d’une résolution temporelle directe du problème transitoire. Les deux modélisations A et B sont pour les fissures maillées. Les deux modélisations C et D sont pour les fissures non-maillées (X-FEM).
Solution de référence#
Méthode de calcul utilisée#
La solution de référence est celle obtenue par une résolution temporelle directe du problème transitoire. L’opérateur DYNA_VIBRA est utilisé pour identifier le champs de déplacement, avec un schéma d’intégration en temps de Newmark.
L’évolution des facteurs d’intensité de contraintes en fonction du temps est ensuite calculée par interpolation des sauts de déplacements (opérateur POST_K1_K2_K3).
Résultats de référence – Modélisation A#
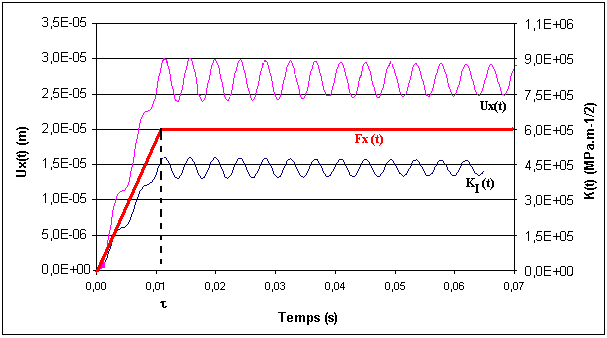
Pour la modélisation A, la plaque est sollicitée par une force dans le plan \((O,x,y)\) et les déplacements dans la direction \(z\) sont bloqués. Le résultat de référence, calculé par résolution temporelle directe sur un maillage 2D, est tracé sur la figure suivante. Le déplacement horizontal du haut de la plaque et le facteur d’intensité des contraintes oscillent avec une fréquence correspondant au premier mode propre de la structure.
Résultats de référence– Modélisation B#

L’évolution des trois facteurs d’intensité des contraintes est tracée sur la figure suivante pour le nœud situé au milieu du fond de fissure. Les oscillations des facteurs d’intensité des contraintes montrent la contribution prépondérante du premier mode de flexion de la plaque dans la direction \(x\) et du premier mode de flexion dans la direction \(z\) .
Résultats de référence – Modélisation C#
La modélisation C représente une fissure 2D non-maillée (X-FEM). Les autres caractéristiques sont identiques à la modélisation A. Pour la modélisation C, la solution de référence est la solution calculée par code_aster à partir d’une résolution temporelle directe du problème transitoire. Les commandes utilisées pour générer cette solution sont fournies dans le fichier commande en tant que commentaires.
Résultats de référence – Modélisation D#
La modélisation D représente une fissure 3D non-maillée (X-FEM). Les autres caractéristiques sont identiques à la modélisation B. Pour la modélisation D, la solution de référence est la solution calculée par code_aster à partir d’une résolution temporelle directe du problème transitoire. Les commandes utilisées pour générer cette solution sont fournies dans le fichier commande en tant que commentaires.
Incertitude sur la solution#
La résolution directe explicite du problème transitoire peut être considérée comme exacte. L’incertitude sur l’identification des facteurs d’intensité des contraintes par interpolation des sauts de déplacements est de l’ordre de 5 %.
Références bibliographiques#
GALENNE, S. DI DOMIZIO: Méthode thêta en mécanique de la rupture: développement de la forme bilinéaire g en 3D et application au cas de la dynamique basse fréquence, NoteEDF HT-65/05/024/A, 2005
Modélisation A#
Caractéristiques de la modélisation#
Il s’agit d’une modélisation 2D – contraintes planes. Le calcul de l’évolution des facteurs d’intensité des contraintes en fonction du temps est réalisé en plusieurs étapes:
calcul des15 premiers modes propres de la structure;
calcul des facteurs d’intensité des contraintes modaux associés à ces modespar deux méthodes ;
résolution du problème dynamique transitoire par projection sur base modale;
recombinaison des \(K\) modaux.
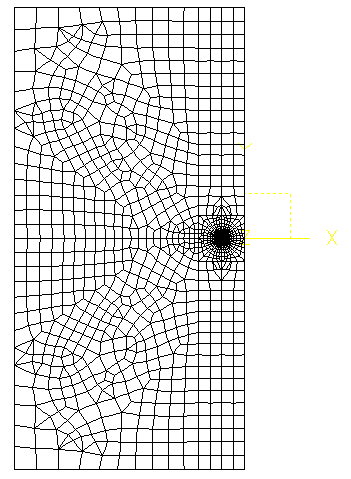
Caractéristiques du maillage#
Le maillage est composé d’éléments quadratiques. Il comporte 2000 nœuds et 700 mailles et est raffiné autour du fond de fissure.
Grandeurs testées et résultats#
Valeurs modales: cas test de non-régression
Numéro du mode |
\({K}_{I}\) ( POST_K1_K2_K3 ) |
\({K}_{I}\) ( option K ) |
% différence |
1 |
-1,921.E+10 |
-1,898.E+10 |
1,2 |
2 |
-1,166.E+11 |
-1,152.E+11 |
1,3 |
3 |
8,039.E+10 |
7,948.E+10 |
1,1 |
4 |
-1,188.E+11 |
-1,174.E+11 |
1,2 |
5 |
1,723.E+11 |
1,705.E+11 |
1,1 |
Valeurs temporelles \({K}_{1}(t)\) : comparaison à la résolution explicite
Instant |
Référence |
Aster |
% différence |
0,0005 |
24055,6 |
24337,0 |
1,2 |
0,001 |
44676,8 |
45159,3 |
1,1 |
0,002 |
90592,3 |
91679,4 |
1,2 |
0,003 |
134065,3 |
135633,9 |
1,2 |
0,004 |
181113,3 |
183286,7 |
1,2 |
Remarque#
La différence entre les valeurs modales calculées par interpolation des sauts de déplacement ou par la méthode thêta est faible et cohérente avec celle observée sur les problèmes statiques.
La valeur de \({K}_{1}(t)\) est calculée à partir des \({K}_{I}\) modaux (méthode K) et des coefficients de la résolution sur base modale directement dans le cas test par des lignes de commande en python:
\({K}_{I}(t)=\underset{i=1}{\overset{M}{\Sigma}}{\alpha}_{i}(t).{K}_{I}^{i}\)
où les coefficients \({\alpha}_{i}(t)\) sont les coefficients de participation modale, extraits du résultat de l’opérateur DYNA_VIBRA, et les \({K}_{I}^{i}\) sont les facteurs d’intensité des contraintes modaux.
La précision obtenue est satisfaisante compte tenu du nombre d’éléments retenus dans la base modale. La précision augmente rapidement avec le nombre de modes [bib1].
Modélisation B#
Caractéristiques de la modélisation#
Il s’agit d’une modélisation 3D. Le calcul de l’évolution des facteurs d’intensité des contraintes en fonction du temps est réalisé en plusieurs étapes:
calcul des50 premiers modes propres de la structure;
calcul des facteurs d’intensité des contraintes modaux associés à ces modespar deux méthodes ;
résolution du problème dynamique transitoire par projection sur base modale;
recombinaison des \(K\) modaux.
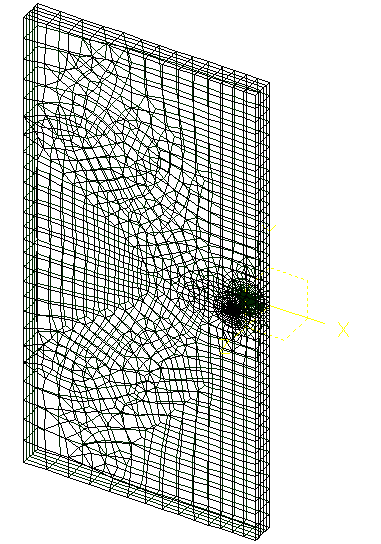
Caractéristiques du maillage#
Le maillage est composé d’éléments linéaires. Il comporte 8200 nœuds et 8900 mailles et est raffiné autour du fond de fissure.
Grandeurs testées et résultats#
Les valeurs indiquées sont celles trouvées au nœud qui est au milieu du fond de fissure.
Valeurs modales: cas test de non-régression
Numéro du mode |
\({K}_{I}\) ( POST_K1_K2_K3 ) |
\({K}_{I}\) ( option K ) |
% différence |
1 |
5,631E+09 |
4,790E+09 |
14,9 |
2 |
8,599E+09 |
7,291E+09 |
15,2 |
3 |
6,940E+10 |
5,897E+10 |
15,0 |
4 |
-2,702E+11 |
-2,897E+11 |
-7,2 |
5 |
-9,637E+10 |
-8,165E+10 |
15,3 |
Valeurs temporelles \({K}_{I}(t)\) : comparaison à la résolution explicite
Instant ( \(s\) ) |
Référence ( \(\mathrm{Pa.}\sqrt{m}\) ) |
Aster ( \(\mathrm{Pa.}\sqrt{m}\) ) |
% différence |
0.0005 |
696752,4 |
721825,9 |
3,6 |
0.001 |
1153703,3 |
1239061,8 |
7,4 |
0.002 |
997675,6 |
1110569,6 |
11,3 |
0.003 |
1305429,9 |
1364524,8 |
4,5 |
0.004 |
870347,2 |
1004735,2 |
15,4 |
Remarque#
La différence entre les valeurs modales calculées par interpolation des sauts de déplacement ou par la méthode thêta est élevée: cela s’explique par le maillage linéaire très peu raffiné dans l’épaisseur de la plaque.
La valeur de \({K}_{I}(t)\) est calculée à partir des \({K}_{I}\) modaux (optionK) et des coefficients de la résolution sur base modale directement dans le cas test par lignes de commande en python:
\({K}_{I}(s,t)=\underset{i=1}{\overset{M}{\Sigma}}{\alpha}_{i}.{K}_{I}^{i}(s)\)
où les coefficients \({\alpha}_{i}(t)\) sont les coefficients de participation modale, extraits du résultat de l’opérateur DYNA_VIBRA, et les \({K}_{I}^{i}(s)\) sont les facteurs d’intensité des contraintes modaux.
La précision obtenue est satisfaisante compte tenu du nombre d’éléments retenus dans la base modale (50) et la taille du maillage. La précision augmente rapidement avec le nombre de modes [bib1].
Modélisation C#
Caractéristiques de la modélisation#
La fissure est modélisée par la méthode X-FEM. On utilise une modélisation C_PLAN et l’opérateur CALC_G_XFEM.
Caractéristiques du maillage#
Le maillage contient 96000 éléments de type QUAD4.
Grandeurs testées et résultats#
On teste les facteurs d’intensité de contrainte dynamiques \({K}_{I}(t)\) et \({K}_{\mathit{II}}(t)\) à \(t=2.E-3\mathit{sec}\) .
Identification |
Type de référence |
Valeur de référence |
Tolérance |
\({K}_{I}(t)\) |
“AUTRE_ASTER” |
2.41542E+06 |
0.2% |
\({K}_{\mathit{II}}(t)\) |
“AUTRE_ASTER” |
3.57437E+05 |
0.6% |
Modélisation D#
Caractéristiques de la modélisation#
La fissure est modélisée par la méthode X-FEM. On utilise une modélisation 3D et l’opérateur CALC_G_XFEM.
Caractéristiques du maillage#
Le maillage contient 1875 éléments de type HEXA8.
Grandeurs testées et résultats#
On teste les facteurs d’intensité de contrainte dynamiques \({K}_{I}(t)\) , \({K}_{\mathit{II}}(t)\) et \({K}_{\mathit{III}}(t)\) à \(t=4.E-3\mathit{sec}\) pour le fond de fissure au milieu d’épaisseur.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
\({K}_{I}(t)\) |
“AUTRE_ASTER” |
3.5521523 E+06 |
2.0 % |
\({K}_{\mathit{II}}(t)\) |
“AUTRE_ASTER” |
4.2648023 E+05 |
10.0% |
\({K}_{\mathit{III}}(t)\) |
“AUTRE_ASTER” |
-8.5924717E+05 |
4% |
Synthèse des résultats#
Ce test permet de valider le calcul des facteurs d’intensité modaux par les opérateur CALC_G (option K) et CALC_G_XFEM (option CALC_K_G) et illustre leur utilisation pour la résolution d’un problème de mécanique de la rupture en dynamique basse fréquence par recombinaison modale.
Le rapport entre les temps de calcul de la résolution explicite et de la résolution sur base modale sont compris entre 10 et 50 selon le type de maillage, et la précision de la méthode de recombinaison modale est pleinement satisfaisante.
Les résultats des modélisations C et D permettent d’étendre l’application de la méthode X-FEM pour calculer les facteurs d’intensité des contraintes modaux. La prochaine étape sera pour la résolution d’un problème de mécanique de la rupture en dynamique basse fréquence par recombinaison modale