v6.03.167 SSNP167 - Inclusion de deux couronnes sous pression non uniforme#
Résumé :
Ce test sert à évaluer les performances d’Aster en ce qui concerne le traitement du contact entre deux structures avec compatibilité et incompatibilité géométrique entre les surfaces maître et esclave dans le cadre de l’hypothèse des petites perturbations.
On considère une structure composée de deux couronnes concentriques. L’interface entre les deux couronnes est la surface de contact. Leur rigidité, représentée par leur module de Young joue un rôle important dans l’évaluation de la valeur des déformations et des fluctuations de la pression de contact. On cherche aussi à savoir quels sont les effets de l’utilisation d’un maillage d’ordre supérieur, avec l’utilisation de maillages linéaires ou quadratiques.
Une solution analytique a été développée pour ce problème afin de valider les résultats numériques calculés. La validation de ce test porte sur les valeurs de la pression de contact et du déplacement.
Solution de référence#
Nous développons ici une solution analytique pour le problème présenté ci-dessus. Cette solution sera développée avec l’hypothèse de petites déformations en considérant que les matériaux des couronnes sont isotropes, régis par une loi élastique linéaire sans variation de température.
La solution en déplacement du problème a la forme générique suivante :
\(u={u}_{r}(r,\theta ,z).\underline{{e}_{r}}+{u}_{\theta}(r,\theta ,z).\underline{{e}_{\theta}}+{u}_{z}(r,\theta ,z).\underline{{e}_{z}}\)
On résoudra le problème dans le cadre de l’hypothèse des déformations planes. Notre chargement s’écrivant sous la forme \(p={\alpha}_{0}+{\alpha}_{1}.\cos(2\theta )\) , on découplera la résolution du problème en une partie où la pression est uniforme \(p={\alpha}_{0}\) , et une partie où la pression est variable \(p={\alpha}_{1}.\cos(2\theta )\) .
Pression uniforme#
En utilisant les symétries du problème et l’hypothèse d’invariance selon z des déformations planes, la solution du problème prend la forme suivante:
\(\begin{array}{c}{u}_{r}={u}_{r}(r)\\ {u}_{\theta}=0\\ {u}_{z}=0\end{array}\) éq 2.1
En utilisant l’équation de Lamé-Navier:
\(\begin{array}{c}(\lambda +\mu )\underline{\mathit{grad}}(\nabla .(\underline{u}))+\mu \Delta \underline{u}+\underline{\mathit{fd}}=\underline{0}\end{array}\) éq 2.2
où \(\underline{\mathit{fd}}=\underline{0}\) sont les efforts volumiques nuls ici, et la formule du Laplacien:
\(\begin{array}{c}\Delta \underline{u}=\underline{\mathit{grad}}(\nabla .(\underline{u}))+\underline{\mathit{rot}}\underline{\mathit{rot}}(\underline{u})\end{array}\) éq 2.3
On peut écrire éq 2.2 sous la forme:
\(\begin{array}{c}(\lambda +2\mu )\underline{\mathit{grad}}(\nabla .(\underline{u}))+\mu \underline{\mathit{rot}}\underline{\mathit{rot}}(\underline{u})+\underline{\mathit{fd}}=\underline{0}\end{array}\) éq 2.4
soit encore en utilisant \(\underline{\mathit{rot}}(\underline{u})=\vec{0}\text{et}\underline{\mathit{fd}}=\vec{0}\text{et}\underline{u}={u}_{r}(r).\underline{{e}_{r}}\) :
\(\begin{array}{c}\nabla .(\underline{u})=\frac{d}{\mathit{dr}}{u}_{r}(r)+\frac{1}{r}{u}_{r}(r)\\ \underline{\mathit{grad}}(\nabla .\underline{u})=\frac{d}{{d}_{r}}[\frac{1}{r}\frac{d}{{d}_{r}}(r{u}_{r}(r))].{\underline{e}}_{r}\\ \text{soit encore}(\lambda +2\mu )\frac{d}{{d}_{r}}[\frac{1}{r}\frac{d}{{d}_{r}}(r{u}_{r}(r))]=0\end{array}\) éq 2.5
En intégrant l’équation, on obtient pour les couronnes (extérieure et intérieure) la forme suivante du champ de déplacement:
\({u}_{r}={C}_{i}r+\frac{{D}_{i}}{r}\text{}{u}_{\theta}=0\text{}{u}_{z}=0\) éq 2.6
Pour déterminer \({C}_{i}\) et \({D}_{i}\) , il nous reste à imposer les conditions limites en pression et en déplacement. Pour cela, il faut d’abord calculer les déformations puis les contraintes associées au champ de déplacement.
Les déformations sont la partie symétrique du gradient des déplacements. On obtient:
\(\begin{array}{c}{ϵ}_{\mathit{rr}}={C}_{i}-\frac{{D}_{i}}{\mathit{r²}}\\ {ϵ}_{\theta \theta }={C}_{i}+\frac{{D}_{i}}{\mathit{r²}}\\ {ϵ}_{zz}={ϵ}_{r\theta }={ϵ}_{\mathit{rz}}={ϵ}_{\theta z}=0\end{array}\) éq 2.7
En appliquant la loi de Hooke:
\(\underline{\underline{\sigma}}=\lambda \mathit{tr}(\underline{\underline{ϵ}})\underline{\underline{1}}+2\mu \underline{\underline{ϵ}}\) éq 2.8
on obtient la forme générale suivante pour les contraintes:
\(\begin{array}{c}{\sigma}_{\mathit{rr}}=\frac{E}{1+\nu }(\frac{{C}_{i}}{1-2\nu }-\frac{{D}_{i}}{\mathit{r²}})\\ {\sigma}_{\theta \theta }=\frac{E}{1+\nu }(\frac{{C}_{i}}{1-2\nu }+\frac{{D}_{i}}{\mathit{r²}})\\ {\sigma}_{zz}=\frac{2\nu {\mathit{EC}}_{i}}{(1+\nu )(1-2\nu )}\\ {\sigma}_{r\theta }={\sigma}_{\mathit{rz}}={\sigma}_{\theta z}=\underline{0}\end{array}\) éq 2.9
En posant:
\(\begin{array}{c}{A}_{i}=\frac{{E}_{i}}{(1+{\nu}_{i})(1-2{\nu}_{i})}{C}_{i}\text{}{B}_{i}=\frac{{E}_{i}}{1+{\nu}_{i}}{D}_{i}\end{array}\) éq 2.10
les contraintes non nulles deviennent:
\(\begin{array}{c}{\sigma}_{\mathit{rr}}={A}_{i}-\frac{{B}_{i}}{\mathit{r²}}\\ {\sigma}_{\theta \theta }={A}_{i}+\frac{{B}_{i}}{\mathit{r²}}\\ {\sigma}_{zz}=2\nu {A}_{i}\end{array}\) éq 2.11
Il ne nous reste plus qu’à calculer les valeurs de \({A}_{i}\) et \({B}_{i}\) pour chacune des couronnes. On notera \({\lambda}_{n}\) la pression de contact entre les deux couronnes telle que:
\(\begin{array}{c}{\underline{\underline{\sigma}}}_{\mathrm{1rr}}({R}_{2}).(-{\underline{e}}_{r})={\lambda}_{n}{\underline{e}}_{r}\\ {\underline{\underline{\sigma}}}_{\mathrm{2rr}}({R}_{2}).{\underline{e}}_{r}=-{\lambda}_{n}{\underline{e}}_{r}\end{array}\) éq 2.12
avec les conditions aux limites:
\(\begin{array}{c}{\underline{\underline{\sigma}}}_{\mathrm{1rr}}({R}_{1}).{\underline{e}}_{r}=-\mathit{p.}{\underline{e}}_{r}\\ {\underline{\underline{\sigma}}}_{\mathrm{2rr}}({R}_{3}).(-{\underline{e}}_{r})=\underline{0}\end{array}\) éq 2.13
La condition de continuité sur le déplacement à l’interface entre les deux couronnes en contact donne de plus:
\(\begin{array}{c}{u}_{r;1}(\mathit{R2})={u}_{r;2}(\mathit{R2})\end{array}\) éq 2.14
Nous avons donc 5 équations pour les 5 inconnues \(\begin{array}{c}{A}_{1},{B}_{1},{A}_{2},{B}_{2,}{\lambda}_{n}\end{array}\) .
Le système des 4 premières équations nous permet d’obtenir:
\(\begin{array}{c}{A}_{1}=\frac{-p{R}_{1}^{2}+{\lambda}_{n}{R}_{2}^{2}}{{R}_{1}^{2}-{R}_{2}^{2}};{B}_{1}=(-p+{\lambda}_{n})\frac{{R}_{1}^{2}{R}_{2}^{2}}{{R}_{1}^{2}-{R}_{2}^{2}}\\ {A}_{2}=-{\lambda}_{n}\frac{{R}_{2}^{2}}{{R}_{2}^{2}-{R}_{3}^{2}};{B}_{2}=-{\lambda}_{n}\frac{{R}_{2}^{2}{R}_{3}^{2}}{{R}_{2}^{2}-{R}_{3}^{2}}\end{array}\) éq 2.15
et l’équation de continuité sur le déplacement permet enfin d’avoir la pression de contact:
\({\lambda}_{n}=\frac{2p{R}_{1}^{2}(1-{\nu}_{1})}{{R}_{1}^{2}+{R}_{2}^{2}(1-2{\nu}_{1})+\frac{{E}_{1}}{{E}_{2}}\frac{1+{\nu}_{2}}{1+{\nu}_{1}}\frac{{R}_{1}^{2}-{R}_{2}^{2}}{{R}_{2}^{2}-{R}_{3}^{2}}({R}_{2}^{2}(1-2{\nu}_{2})+{R}_{3}^{2})}\) éq 2.16
Pression variable#
En utilisant l’hypothèse d’invariance selon z des déformations planes, la solution du problème prend la forme suivante:
\(\begin{array}{c}{u}_{r}={u}_{r}(r,\theta )\\ {u}_{\theta}={u}_{\theta}(r,\theta )\\ {u}_{z}=0\end{array}\) éq 2.17
Dans toute la suite, on notera les paramètres propres à chaque solide par un indice i, avec i=1,2.
En l’absence de forces de volume, on utilisera une forme de la fonction d’Airy proposée par Michell [1], en coordonnées polaires:
\(\begin{array}{c}\chi (r,\theta )={A}_{01}{r}^{2}+{A}_{02}{r}^{2}\log(r)+{A}_{03}\log(r)+{A}_{04}\theta \\ +({A}_{11}{r}^{3}+{A}_{12}\mathit{rlog}(r)+{A}_{13}{r}^{-1})\cos(\theta )+{A}_{14}r\theta \sin(\theta )\\ +({B}_{11}{r}^{3}+{B}_{12}r\log(r)+{B}_{13}{r}^{-1})\sin(\theta )+{B}_{14}r\theta \cos(\theta )\\ +\sum_{n=2}^{\infty}({A}_{\mathit{n1}}{r}^{n+2}+{A}_{\mathit{n2}}{r}^{-n+2}+{A}_{\mathit{n3}}{r}^{n}+{A}_{\mathit{n4}}{r}^{-n})\cos(n\theta )\\ +\sum_{n=2}^{\infty}({B}_{\mathit{n1}}{r}^{n+2}+{B}_{\mathit{n2}}{r}^{-n+2}+{B}_{\mathit{n3}}{r}^{n}+{B}_{\mathit{n4}}{r}^{-n})\sin(n\theta )\end{array}\) éq 2.18
Les termes du tenseur des contraintes de Cauchy non nuls s’expriment en fonction de la fonction d’Airy comme suit:
\(\begin{array}{c}{\sigma}_{\mathit{rr}}=\frac{1}{r}\frac{\partial \chi }{\partial r}+\frac{1}{{r}^{2}}\frac{{\partial}^{2}\chi }{\partial {\theta}^{2}}\\ {\sigma}_{\theta \theta }=\frac{{\partial}^{2}\chi }{\partial {r}^{2}}\\ {\sigma}_{r\theta }=\frac{-\partial }{\partial r}(\frac{1}{r}\frac{\partial \chi }{\partial \theta })\\ {\sigma}_{zz}=\nu ({\sigma}_{\mathit{rr}}+{\sigma}_{\theta \theta })\end{array}\) éq 2.19
Notre pression \(p={\alpha}_{1}.\cos(2\theta )\) variant en \(\cos(2\theta )\) , on ne prendra que la partie variant en \(\cos(2\theta )\) dans la fonction d’Airy. La fonction d’Airy s’écrira alors:
\({\chi }_{i}(r,\theta )=({A}_{i}{r}^{2}+{B}_{i}{r}^{4}+\frac{{C}_{i}}{{r}^{2}}+{D}_{i})\cos(2\theta )\) éq 2.20
A partir de là, on peut exprimer les contraintes non nulles dans le repère polaire:
\(\begin{array}{c}{\sigma}_{\mathit{rr}}^{i}=(-{\mathrm{2A}}_{i}-6\frac{{C}_{i}}{{r}^{4}}-4\frac{{D}_{i}}{{r}^{2}})\cos(2\theta )\\ {\sigma}_{\theta \theta }^{i}=({\mathrm{2A}}_{i}+{\mathrm{12B}}_{i}{r}^{2}+6\frac{{C}_{i}}{{r}^{4}})\cos(2\theta )\\ {\sigma}_{r\theta }^{i}=2({A}_{i}+{\mathrm{3B}}_{i}{r}^{2}-3\frac{{C}_{i}}{{r}^{4}}-\frac{{D}_{i}}{{r}^{2}})\sin(2\theta )\\ {\sigma}_{zz}^{i}=\nu ({\sigma}_{\mathit{rr}}+{\sigma}_{\theta \theta })\end{array}\) éq 2.21
et les termes du tenseur de déformations en utilisant la loi de Hooke:
\(\underline{\underline{\epsilon}}=\frac{1}{E}((1+\nu )\underline{\underline{\sigma}}-\nu \mathit{tr}(\underline{\underline{\sigma}})\underline{\underline{I}})\) éq 2.22
Les termes non nuls du tenseur des déformations s’expriment alors en fonction des constantes du problème:
\(\begin{array}{c}{\epsilon}_{\mathit{rr}}^{i}=\frac{1+{\nu}_{i}}{{E}_{i}}[(-{\mathrm{2A}}_{i}-6\frac{{C}_{i}}{{r}^{4}}-4\frac{{D}_{i}}{{r}^{2}})-{\nu}_{i}({\mathrm{12B}}_{i}{r}^{2}-4\frac{{D}_{i}}{{r}^{2}})]\cos(2\theta )\\ {\epsilon}_{\theta \theta }^{i}=\frac{1+{\nu}_{i}}{{E}_{i}}[({\mathrm{2A}}_{i}+{\mathrm{12B}}_{i}{r}^{2}+6\frac{{C}_{i}}{{r}^{4}})-{\nu}_{i}({\mathrm{12B}}_{i}{r}^{2}-4\frac{{D}_{i}}{{r}^{2}})]\cos(2\theta )\\ {\epsilon}_{r\theta }^{i}=\frac{1+{\nu}_{i}}{{E}_{i}}[2({A}_{i}+{\mathrm{3B}}_{i}{r}^{2}-3\frac{{C}_{i}}{{r}^{4}}-\frac{{D}_{i}}{{r}^{2}})]\sin(2\theta )\end{array}\) éq 2.23
On utilisera ces champs pour exprimer les déplacements dans le repère polaire.
On a:
\(\begin{array}{c}\frac{\partial {u}_{r}}{\partial r}={\epsilon}_{\mathit{rr}}\\ \frac{\partial {u}_{\theta}}{\partial \theta }=r{\epsilon}_{\theta \theta }-{u}_{r}\\ \frac{1}{2}(\frac{\partial {u}_{\theta}}{\partial r}+\frac{1}{r}\frac{\partial {u}_{r}}{\partial \theta }-\frac{{u}_{\theta}}{r})={\epsilon}_{r\theta }\end{array}\) éq 2.24
En intégrant ces relations, on peut exprimer les déplacements:
\(\begin{array}{c}{u}_{r}^{i}=\frac{1+{\nu}_{i}}{{E}_{i}}[(-{\mathrm{2A}}_{i}r+2\frac{{C}_{i}}{{r}^{3}}+4\frac{{D}_{i}}{r})-{\nu}_{i}({\mathrm{4B}}_{i}{r}^{3}+4\frac{{D}_{i}}{r})]\cos(2\theta )\\ {u}_{\theta}^{i}=\frac{1+{\nu}_{i}}{{E}_{i}}[({\mathrm{2A}}_{i}r+{\mathrm{6B}}_{i}{r}^{3}+2\frac{{C}_{i}}{{r}^{3}}-2\frac{{D}_{i}}{r})-{\nu}_{i}({\mathrm{4B}}_{i}{r}^{3}-4\frac{{D}_{i}}{r})]\sin(2\theta )\end{array}\) éq 2.25
Maintenant qu’on a exprimé tous nos champs en fonction des constantes \({A}_{i},{B}_{i},{C}_{i},{D}_{i}(i=1,2)\) , on doit calculer ces dernières en fonction des caractéristiques géométriques et du chargement.
On notera \(\lambda\) la pression de contact entre les deux couronnes.
Les conditions aux limites sont:
\(\begin{array}{c}{\sigma}_{\mathit{rr}}^{1}({R}_{1})=-\alpha \cos(2\theta ):\text{pression externe appliquée}\\ {\sigma}_{r\theta }^{1}({R}_{1})=0:\text{pression tangentielle nulle sur le bord extérieur de la couronne 1}\\ {\sigma}_{\mathit{rr}}^{2}({R}_{2})=\lambda :\text{pression de contact appliquée par la couronne 1 sur la couronne 2}\\ {\sigma}_{\mathit{rr}}^{1}({R}_{2})=\lambda :\text{pression de contact appliquée par la couronne 2 sur la couronne 1}\\ {\sigma}_{r\theta }^{1}({R}_{2})=0:\text{pas de frottement entre les deux couronnes}\\ {\sigma}_{r\theta }^{2}({R}_{2})=0:\text{pas de frottement entre les deux couronnes}\\ {\sigma}_{\mathit{rr}}^{2}({R}_{3})=0:\text{bord extérieur de la couronne 2 libre}\\ {\sigma}_{r\theta }^{2}({R}_{3})=0:\text{bord extérieur de la couronne 2 libre}\end{array}\)
Nous avons donc 8 équations pour les 8 inconnues: \({A}_{1,}{B}_{1,}{C}_{1,}{D}_{1,}{A}_{2,}{B}_{2,}{C}_{2,}{D}_{2}\) .
En posant:
\({f}_{1}={(\frac{{R}_{2}}{{R}_{1}})}^{2}\text{et}{f}_{2}={(\frac{{R}_{3}}{{R}_{2}})}^{2}\)
Le système de 8 équations nous permet d’avoir:
\(\begin{array}{c}{A}_{1}=\frac{{\alpha}_{1}(2{f}_{1}^{2}+{f}_{1}+1)-\lambda ({f}_{1}^{3}+{f}_{1}^{2}+2{f}_{1})}{2{(1-{f}_{1})}^{3}};{B}_{1}=\frac{-1}{{R}_{2}^{2}}\frac{{\alpha}_{1}(3{f}_{1}^{2}+{f}_{1})-\lambda ({f}_{1}^{3}+3{f}_{1}^{2})}{6{(1-{f}_{1})}^{3}};\\ {C}_{1}={R}_{2}^{4}\frac{{\alpha}_{1}({f}_{1}+3)-\lambda ({\mathrm{3f}}_{1}+1)}{6{(1-{f}_{1})}^{3}};{D}_{1}=-{R}_{2}^{2}\frac{{\alpha}_{1}({f}_{1}^{2}+{f}_{1}+2)-\lambda (2{f}_{1}^{2}+{f}_{1}+1)}{2{(1-{f}_{1})}^{3}}\\ {A}_{2}=\frac{\lambda (2{f}_{2}^{2}+{f}_{2}+1)}{2{(1-{f}_{2})}^{3}};{B}_{2}=\frac{-1}{{R}_{3}^{2}}\frac{\lambda (3{f}_{2}^{2}+{f}_{2})}{6{(1-{f}_{2})}^{3}};\\ {C}_{2}={R}_{3}^{4}\frac{\lambda ({f}_{2}+3)}{6{(1-{f}_{2})}^{3}};{D}_{2}=-{R}_{3}^{2}\frac{\lambda ({f}_{2}^{2}+{f}_{2}+2)}{2{(1-{f}_{2})}^{3}}\end{array}\) éq 2.26
On peut exprimer analytiquement la pression de contact
En utilisant la continuité du déplacement radial au niveau de l’interface de contact:
\({u}_{r}^{1}({R}_{2})={u}_{r}^{2}({R}_{2})\) éq 2.27
on peut exprimer analytiquement la pression de contact:
\(\lambda =\frac{{\mathit{coef}}_{1}}{{\mathit{coef}}_{2}+{\mathit{coef}}_{3}}{\alpha}_{1}\) éq 2.28
telle que:
\(\begin{array}{c}{\mathit{coef}}_{1}=\frac{1+{\nu}_{1}}{6{E}_{1}{(1-{f}_{1})}^{3}}[(-12{f}_{1}^{2}-8{f}_{1}-12)-{\nu}_{1}(-12{f}_{1}^{2}-8{f}_{1}-12)]\\ {\mathit{coef}}_{2}=\frac{1+{\nu}_{1}}{6{E}_{1}{(1-{f}_{1})}^{3}}[(-3{f}_{1}^{3}-15{f}_{1}^{2}-9{f}_{1}-5)-{\nu}_{1}(-2{f}_{1}^{3}-18{f}_{1}^{2}-6{f}_{1}-6)]\\ {\mathit{coef}}_{3}=\frac{1+{\nu}_{2}}{6{E}_{2}{(1-{f}_{2})}^{3}}[(-5{f}_{2}^{3}-9{f}_{2}^{2}-15{f}_{2}-3)-{\nu}_{2}(-6{f}_{2}^{3}-6{f}_{2}^{2}-18{f}_{2}-2)]\end{array}\) éq 2.29
Valeurs testées#
On teste la pression de contact à l’interface entre les deux couronnes, au niveau de la surface esclave, ainsi que les déplacements selon X et Y: \({u}_{x},{u}_{y}\) (et selon Z aussi pour les modèles 3D) , en déformations planes.
La valeur de la pression appliquée sur le bord extérieur de couronne en \(r={R}_{1}\) s’exprime sous la forme: \(p(\theta )={10}^{7}+{10}^{5}\cos(2\theta )(\mathit{Pa})\) , avec \(\theta =\arctan(\frac{Y}{X})\) .
On testera les valeurs des points situés sur le rayon \(r={R}_{2}\) , du côté de la couronne 2, à différents angles polaires: \(\theta \in \lbrace 0,\frac{\pi}{4},\frac{\pi}{2},\frac{3\pi }{4},\pi ,\frac{5\pi }{4},\frac{3\pi }{2},\frac{7\pi }{4}\rbrace\) pour les modèles A,B,C,D.
En ce qui concerne les modèles E,G et H, on fera un test min-max sur trois groupes de nœuds. Chaque groupe de nœuds contient trois nœuds à coordonnées X et Y égales, ce qui permet de tester l’invariance du résultat obtenu suivant Z. La valeur de référence utilisée dans le test est la valeur minimale analytique (respectivement maximale) de la composante testée pour chaque groupe de nœud. En ce qui concerne le modèle F, seulement trois nœuds à coordonnées X et Y égales ont été testés, au centre de la structure, de façon à éviter les effets de bord dus au fait que les maillages des surfaces de contact maître et esclave ne sont pas compatibles.
Bibliographie#
[1] J.R. Barber, «Elasticity», Kluwer Academic Publishers, 1982
Modélisation A#
Il s’agit d’une modélisation en déformations planes (D_PLAN). Les surfaces maîtresse et esclave sont conformes.
Les modules de Young \({E}_{1}={E}_{2}\) et les coefficients de Poisson \({\nu}_{1}={\nu}_{2}\) sont respectivement \(1.0E9\mathit{Pa}\) et \(0.2\) . La pression appliquée sur le bord de la couronne extérieure vaut \(1.0E7+\mathrm{10E5.cos}(2\theta )(\mathit{Pa})\) , \(\theta\) étant l’angle polaire.
La couronne extérieure définit la surface maîtresse.
Le maillage (Figure 3.2-1) comporte:
480 mailles de type SEG2;
2640 mailles de type QUAD4.
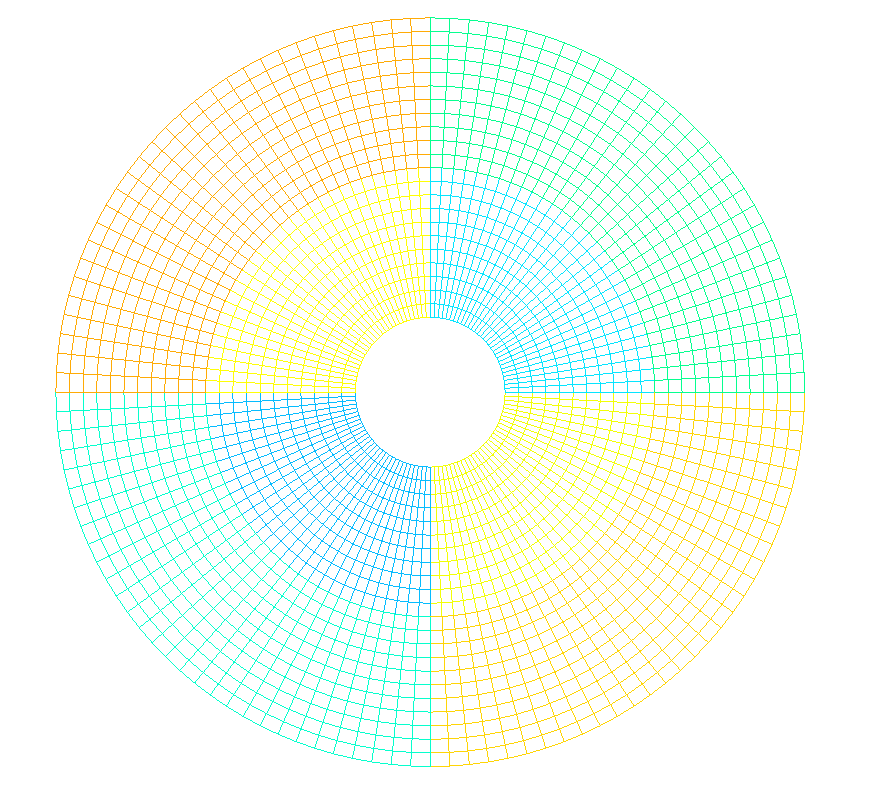
Figure 3.2-a : Le maillage de la modélisation A
On notera \(\lambda\) la pression de contact calculée analytiquement, \(({U}_{x},{U}_{y})\) les déplacements calculés analytiquement.
Dans le cas où les déplacements sont nuls, on définit une tolérance absolue égale à 2% de la valeur du déplacement radial maximal Urmax=5.5E-03.
On calcule la pression de contact (LAGS_C) et les composantes du déplacement dans le plan (X,Y) (DX,DY) pour les nœuds de coordonnées suivantes:
N9 ( 0.6 , 0.0)
N10 ( 0.0 , 0.6)
N11 (-0.6 , 0.0)
N12 ( 0.0 ,-0.6)
N303( 4.24264068712436E-01 , 4.24264068711421E-01)
N371(-4.24264068711421E-01 , 4.24264068712436E-01)
N439(-4.24264068712436E-01 ,-4.24264068711421E-01)
N507( 4.24264068711421E-01 ,-4.24264068712436E-01)
Identification |
Référence |
Aster |
tolérance |
LAGS_C au nœud 9 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 9 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 9 |
\({U}_{y}(x,y)\) |
Analytique |
0,02.Vmax |
LAGS_C au nœud 10 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 10 |
\({U}_{x}(x,y)\) |
Analytique |
0,02.Vmax |
DY au nœud 10 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 11 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 11 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 11 |
\({U}_{y}(x,y)\) |
Analytique |
0,02.Vmax |
LAGS_C au nœud 12 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 12 |
\({U}_{x}(x,y)\) |
Analytique |
0,02.Vmax |
DY au nœud 12 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 303 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 303 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 303 |
\({U}_{y}(x,y)\) |
Analytique |
0,02.Vmax |
LAGS_C au nœud 371 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 371 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 371 |
\({U}_{y}(x,y)\) |
Analytique |
0,02.Vmax |
LAGS_C au nœud 439 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 439 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 439 |
\({U}_{y}(x,y)\) |
Analytique |
0,02.Vmax |
LAGS_C au nœud 507 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 507 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 507 |
\({U}_{y}(x,y)\) |
Analytique |
0,02.Vmax |
Tableau 3.3-1
Modélisation B#
Il s’agit d’une modélisation en déformations planes (D_PLAN). Les surfaces maîtresse et esclave ne sont pas conformes.
Les modules de Young \({E}_{1}={E}_{2}\) et les coefficients de Poisson \({\nu}_{1}={\nu}_{2}\) sont respectivement \(1.0E9\mathit{Pa}\) et \(0.2\) . La pression appliquée sur le bord de la couronne extérieure vaut \(1.0E7+\mathrm{10E5.cos}(2\theta )(\mathit{Pa})\) , \(\theta\) étant l’angle polaire.
La couronne extérieure définit la surface maîtresse.
Le maillage (Figure 4.2-1) comporte:
480 mailles de type SEG2;
2640 mailles de type QUAD4.
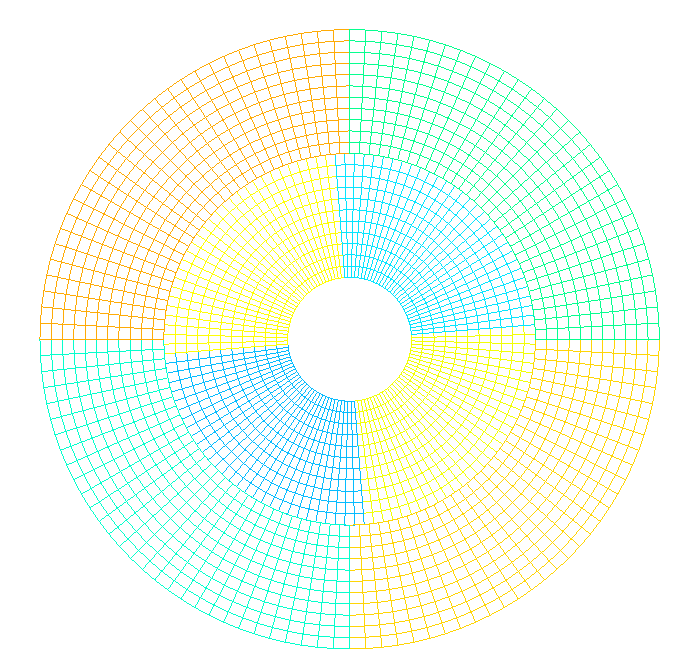
Figure 4.2-a : Le maillage de la modélisation B
On notera \(\lambda\) la pression de contact calculée analytiquement, \(({U}_{x},{U}_{y})\) les déplacements calculés analytiquement.
Dans le cas où les déplacements sont nuls, on définit une tolérance absolue égale à 2% de la valeur du déplacement radial maximal Urmax=5.5E-03.
On calcule la pression de contact (LAGS_C) et les composantes du déplacement dans le plan (X,Y) (DX,DY) pour les nœuds de coordonnées suivantes:
N9 ( 5.98150400239877E-01, 4.70754574367070E-02)
N10 (-4.70754574367070E-02, 5.98150400239877E-01)
N11 (-5.98150400239877E-01,-4.70754574367070E-02)
N12 ( 4.70754574367070E-02,-5.98150400239877E-01)
N303( 3.89668829003112E-01, 4.56243579355747E-01)
N371(-4.56243579355747E-01, 3.89668829003112E-01)
N439(-3.89668829003112E-01,-4.56243579355747E-01)
N507( 4.56243579355747E-01,-3.89668829003112E-01)
Identification |
Référence |
Aster |
tolérance |
LAGS_C au nœud 9 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 9 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 9 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 10 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 10 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 10 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 11 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 11 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 11 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 12 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 12 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 12 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 303 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 303 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 303 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 371 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 371 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 371 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 439 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 439 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 439 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 507 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 507 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 507 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
Tableau 4.3-1
Modélisation C#
Il s’agit d’une modélisation en déformations planes (D_PLAN). Les surfaces maîtresse et esclave sont conformes.
Les modules de Young \({E}_{1}={E}_{2}\) et les coefficients de Poisson \({\nu}_{1}={\nu}_{2}\) sont respectivement \(1.0E9\mathit{Pa}\) et \(0.2\) . La pression appliquée sur le bord de la couronne extérieure vaut \(1.0E7+\mathrm{10E5.cos}(2\theta )(\mathit{Pa})\) , \(\theta\) étant l’angle polaire.
La couronne extérieure définit la surface maîtresse.
Le maillage (Figure 4.2-1) comporte:
480 mailles de type SEG3;
2640 mailles de type QUAD8.
Figure 5.2-a : Le maillage de la modélisation C
On notera \(\lambda\) la pression de contact calculée analytiquement, \(({U}_{x},{U}_{y})\) les déplacements calculés analytiquement.
Dans le cas où les déplacements sont nuls, on définit une tolérance absolue égale à 2% de la valeur du déplacement radial maximal Urmax=5.5E-03.
On calcule la pression de contact (LAGS_C) et les composantes du déplacement dans le plan (X,Y) (DX,DY) pour les nœuds de coordonnées suivantes:
N9 ( 0.6 , 0.0)
N10 ( 0.0 , 0.6)
N11 (-0.6 , 0.0)
N12 ( 0.0 ,-0.6)
N587 ( 4.24264068712436E-01 , 4.24264068711421E-01)
N726 (-4.24264068711421E-01 , 4.24264068712436E-01)
N865 (-4.24264068712436E-01 ,-4.24264068711421E-01)
N1004( 4.24264068711421E-01 ,-4.24264068712436E-01)
Identification |
Référence |
Aster |
tolérance |
LAGS_C au nœud 9 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 9 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 9 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 10 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 10 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 10 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 11 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 11 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 11 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 12 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 12 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 12 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 587 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 587 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 587 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 726 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 726 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 726 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 865 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 865 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 865 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 1004 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 1004 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 1004 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
Tableau 5.3-1
Modélisation D#
Il s’agit d’une modélisation en déformations planes (D_PLAN). Les surfaces maîtresse et esclave ne sont pas conformes.
Les modules de Young \({E}_{1}={E}_{2}\) et les coefficients de Poisson \({\nu}_{1}={\nu}_{2}\) sont respectivement \(1.0E9\mathit{Pa}\) et \(0.2\) . La pression appliquée sur le bord de la couronne extérieure vaut \(1.0E7+\mathrm{10E5.cos}(2\theta )(\mathit{Pa})\) , \(\theta\) étant l’angle polaire.
La couronne extérieure définit la surface maîtresse.
Le maillage (Figure 4.2-1) comporte:
480 mailles de type SEG3;
2640 mailles de type QUAD8.
Figure 6.2-a : Le maillage de la modélisation D
On notera \(\lambda\) la pression de contact calculée analytiquement, \(({U}_{x},{U}_{y})\) les déplacements calculés analytiquement.
Dans le cas où les déplacements sont nuls, on définit une tolérance absolue égale à 2% de la valeur du déplacement radial maximal Urmax=5.5E-03.
On calcule la pression de contact (LAGS_C) et les composantes du déplacement dans le plan (X,Y) (DX,DY) pour les nœuds de coordonnées suivantes:
N9 ( 5.98150400239877E-01, 4.70754574367070E-02)
N10 (-4.70754574367070E-02, 5.98150400239877E-01)
N11 (-5.98150400239877E-01,-4.70754574367070E-02)
N12 ( 4.70754574367070E-02,-5.98150400239877E-01)
N587 ( 3.89668829003112E-01, 4.56243579355747E-01)
N726 (-4.56243579355747E-01, 3.89668829003112E-01)
N865 (-3.89668829003112E-01,-4.56243579355747E-01)
N1004( 4.56243579355747E-01,-3.89668829003112E-01)
Identification |
Référence |
Aster |
tolérance |
LAGS_C au nœud 9 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 9 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 9 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 10 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 10 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 10 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 11 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 11 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 11 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 12 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 12 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 12 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 587 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 587 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 587 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 726 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 726 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 726 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 865 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 865 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 865 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
LAGS_C au nœud 1004 |
\(\lambda (x,y)\) |
Analytique |
2.10-2 |
DX au nœud 1004 |
\({U}_{x}(x,y)\) |
Analytique |
2.10-2 |
DY au nœud 1004 |
\({U}_{y}(x,y)\) |
Analytique |
2.10-2 |
Tableau 6.3-1
Modélisation E#
Il s’agit d’une modélisation 3D. Les surfaces maîtresse et esclave sont en vis-à-vis avec des maillages compatibles. Pour éviter d’avoir des calculs trop lents, on ne prendra que le quart de la géométrie.
Les modules de Young \({E}_{1}={E}_{2}\) et les coefficients de Poisson \({\nu}_{1}={\nu}_{2}\) sont respectivement \(1.0E9\mathit{Pa}\) et \(0.2\) . La pression appliquée sur le bord de la couronne extérieure vaut \(1.0E7+\mathrm{10E5.cos}(2\theta )(\mathit{Pa})\) , \(\theta\) étant l’angle polaire.
La pression ne varie pas dans le sens longitudinal. Pour avoir un modèle conforme aux déformations planes, on imposera un déplacement longitudinal nul sur les deux surfaces supérieures (en rouge sur la figure 7.2-1). On appliquera comme conditions aux limites sur les autres surfaces (en bleu sur la figure 7.2-1) les déplacements solutions.
La couronne extérieure définit la surface maîtresse.
Le maillage (Figure 7.2-1) comporte:
448 mailles de type QUAD4;
384 mailles de type HEXA8.
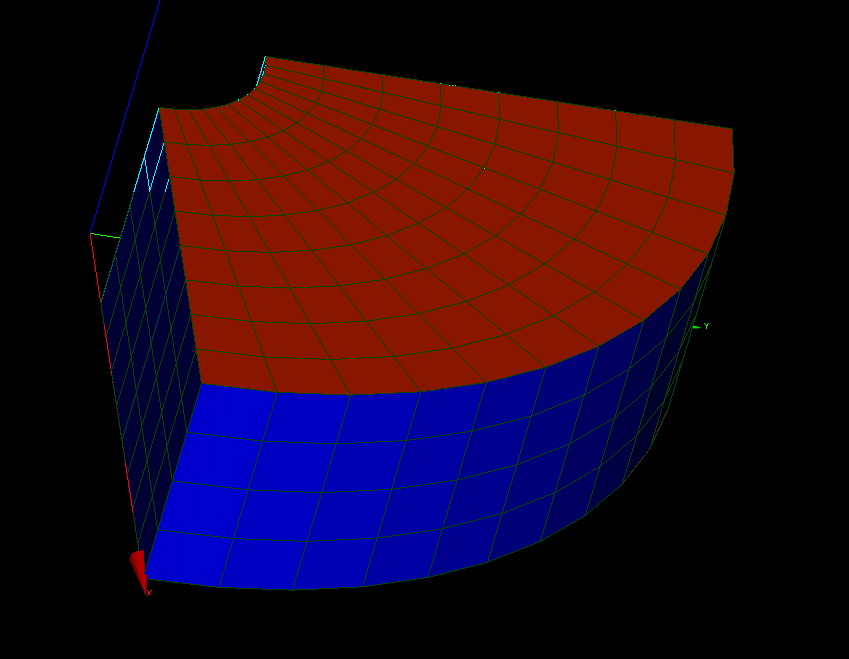
Figure 7.2-a : Le maillage de la modélisation E
On notera \(\lambda\) la pression de contact calculée analytiquement, \(({U}_{x},{U}_{y},{U}_{z})\) les déplacements calculés analytiquement.
Dans le cas où les déplacements sont nuls, on définit une borne absolue égale à 2% la valeur du déplacement maximal Vmax=5.5E-03.
On calcule la valeur minimale et la valeur maximale de la pression de contact (LAGS_C) et des composantes du déplacement (DX,DY,DZ) pour les groupes de nœuds suivants:
GROUPE 1: N47 (5.54327719507606E-01, 2.29610059417040E-01, 0.00000000000000E+00),
N103(5.54327719507606E-01, 2.29610059417040E-01, 4.00000000000000E-01),
N412(5.54327719507606E-0, 2.29610059417040E-01, 1.99999999999678E-01)
GROUPE 2: N50 (4.24264068712436E-01, 4.24264068711421E-01, 0.00000000000000E+00),
N106(4.24264068712436E-01, 4.24264068711421E-01, 4.00000000000000E-01),
N403(4.24264068712436E-01, 4.24264068711421E-01, 1.99999999999678E-01)
GROUPE 3: N53 (2.29610059417922E-01, 5.54327719507241E-01, 0.00000000000000E+00),
N109(2.29610059417922E-01, 5.54327719507241E-01, 4.00000000000000E-01),
N394(2.29610059417922E-01, 5.54327719507241E-01, 1.99999999999678E-01)
Identification |
Référence |
Aster |
tolérance |
LAGS_C min du groupe 1 |
\(\lambda (x,y,z)\) |
-9355226.31353 |
2.10-2 |
DX min du groupe 1 |
\({U}_{x}(x,y,z)\) |
-0.0050526512252 |
2.10-2 |
DY min du groupe 1 |
\({U}_{y}(x,y,z)\) |
-0.0020785420526 |
2.10-2 |
DZ min du groupe 1 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C max du groupe 1 |
\(\lambda (x,y,z)\) |
-9355226.31353 |
2.10-2 |
DX max du groupe 1 |
\({U}_{x}(x,y,z)\) |
-0.0050526512252 |
2.10-2 |
DY max du groupe 1 |
\({U}_{y}(x,y,z)\) |
-0.0020785420526 |
2.10-2 |
DZ max du groupe 1 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C min du groupe 2 |
\(\lambda (x,y,z)\) |
-9259259.25926 |
2.10-2 |
DX min du groupe 2 |
\({U}_{x}(x,y,z)\) |
-0.0037844796198 |
2.10-2 |
DY min du groupe 2 |
\({U}_{y}(x,y,z)\) |
-0.0037579927128 |
2.10-2 |
DZ min du groupe 2 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C max du groupe 2 |
\(\lambda (x,y,z)\) |
-9259259.25926 |
2.10-2 |
DX max du groupe 2 |
\({U}_{x}(x,y,z)\) |
-0.0037844796198 |
2.10-2 |
DY max du groupe 2 |
\({U}_{y}(x,y,z)\) |
-0.0037579927128 |
2.10-2 |
DZ max du groupe 2 |
\({U}_{z}(x,y,,z)\) |
0,0 |
1.E-8 |
LAGS_C min du groupe 3 |
\(\lambda (x,y,z)\) |
-9163292.20499 |
2.10-2 |
DX min du groupe 3 |
\({U}_{x}(x,y,z)\) |
-0.0020034145592 |
2.10-2 |
DY min du groupe 3 |
\({U}_{y}(x,y,z)\) |
-0.0048020637882 |
2.10-2 |
DZ min du groupe 3 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C max du groupe 3 |
\(\lambda (x,y,z)\) |
-9163292.20499 |
2.10-2 |
DX max du groupe 3 |
\({U}_{x}(x,y,z)\) |
-0.0020034145592 |
2.10-2 |
DY max du groupe 3 |
\({U}_{y}(x,y,z)\) |
-0.0048020637882 |
2.10-2 |
DZ max du groupe 3 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
Tableau 7.3-1
Modélisation F#
Il s’agit d’une modélisation 3D. Les surfaces maîtresse et esclave en vis-à-vis sont telles que leur maillage n’est pas compatible. Pour éviter d’avoir des calculs trop lents, on ne prendra que le quart de la géométrie.
Les modules de Young \({E}_{1}={E}_{2}\) et les coefficients de Poisson \({\nu}_{1}={\nu}_{2}\) sont respectivement \(1.0E9\mathit{Pa}\) et \(0.2\) . La pression appliquée sur le bord de la couronne extérieure vaut \(1.0E7+\mathrm{10E5.cos}(2\theta )(\mathit{Pa})\) , \(\theta\) étant l’angle polaire.
La pression ne varie pas dans le sens longitudinal. Pour avoir un modèle conforme aux déformations planes, on imposera un déplacement longitudinal nul sur les deux surfaces supérieures (en rouge sur la figure 8.2-1). On appliquera comme conditions aux limites sur les autres surfaces (en bleu sur la figure 8.2-1) les déplacements solutions.
La couronne extérieure définit la surface maîtresse.
Le maillage (Figure 8.2-1) comporte:
464 mailles de type QUAD4;
400 mailles de type HEXA8.
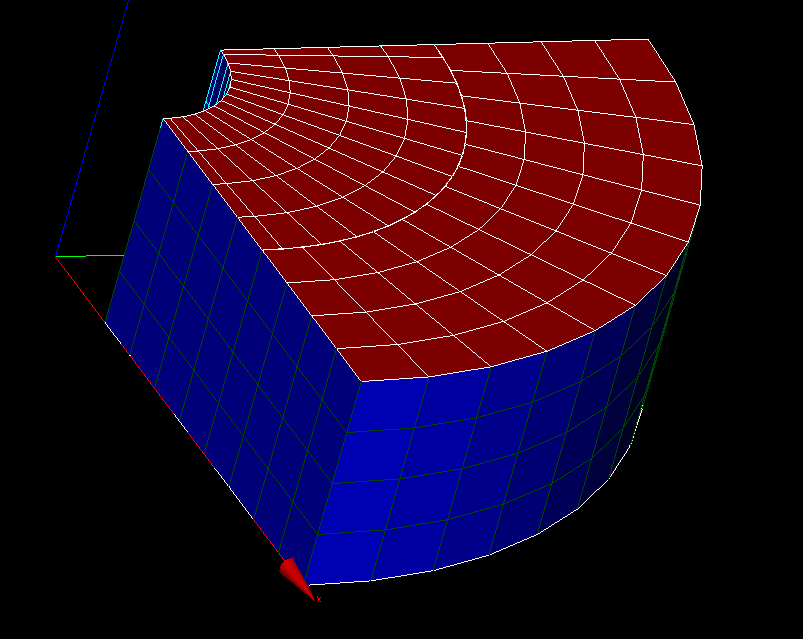
Figure 8.2-a : Le maillage de la modélisation F
On notera \(\lambda\) la pression de contact calculée analytiquement, \(({U}_{x},{U}_{y},{U}_{z})\) les déplacements calculés analytiquement.
Dans le cas où les déplacements sont nuls, on définit une borne absolue égale a 2% la valeur du déplacement maximal Vmax=5.5E-03.
On calcule la pression de contact (LAGS_C) et les composantes du déplacement (DX,DY,DZ) pour les nœuds suivants:
N125(0.421224E-01, 4.427282E-01, 0.00000000000000E+00)
N285(0.421224E-01, 4.427282E-01, 4.00000000000000E-01)
N790(0.421224E-01, 4.427282E-01, 2.00000000000000E-01)
Identification |
Référence |
Aster |
tolérance |
LAGS_C au nœud 125 |
\(\lambda (x,y,z)\) |
Analytique |
2.10-2 |
DX au nœud 125 |
\({U}_{x}(x,y,z)\) |
Analytique |
2.10-2 |
DY au nœud 125 |
\({U}_{y}(x,y,z)\) |
Analytique |
2.10-2 |
DZ au nœud 125 |
\({U}_{z}(x,y,,z)\) |
Analytique |
1.E-8 |
LAGS_C au nœud 285 |
\(\lambda (x,y,z)\) |
Analytique |
2.10-2 |
DX au nœud 285 |
\({U}_{x}(x,y,z)\) |
Analytique |
2.10-2 |
DY au nœud 285 |
\({U}_{y}(x,y,z)\) |
Analytique |
2.10-2 |
DZ au nœud 285 |
\({U}_{z}(x,y,,z)\) |
Analytique |
1.E-8 |
LAGS_C au nœud 790 |
\(\lambda (x,y,z)\) |
Analytique |
2.10-2 |
DX au nœud 790 |
\({U}_{x}(x,y,z)\) |
Analytique |
2.10-2 |
DY au nœud 790 |
\({U}_{y}(x,y,z)\) |
Analytique |
2.10-2 |
DZ au nœud 790 |
\({U}_{z}(x,y,,z)\) |
Analytique |
1.E-8 |
Tableau 8.3-1
Les résultats relatifs à ce modèle sont à considérer soigneusement: la nécessité de créer un maillage non compatible pour les surfaces de contact maître et esclave, représentant seulement le quart de la géométrie, et qui ne génère pas de pression positive aux bords, impose de confondre géométriquement les nœuds aux bords des maillages des surfaces de contact maîtresse et esclave. Ceci génère un profil de pression relativement incorrect et oscillant aux bords de la surface de contact. Cet effet diminue en raffinant le maillage.
Modélisation G#
Il s’agit d’une modélisation 3D. Les surfaces maîtresse et esclave en vis-à-vis ont des maillages compatibles. Pour éviter d’avoir des calculs trop lents, on ne prendra que le quart de la géométrie.
Les modules de Young \({E}_{1}={E}_{2}\) et les coefficients de Poisson \({\nu}_{1}={\nu}_{2}\) sont respectivement \(1.0E9\mathit{Pa}\) et \(0.2\) . La pression appliquée sur le bord de la couronne extérieure vaut \(1.0E7+\mathrm{10E5.cos}(2\theta )(\mathit{Pa})\) , \(\theta\) étant l’angle polaire.
La pression ne varie pas dans le sens longitudinal. Pour avoir un modèle conforme aux déformations planes, on imposera un déplacement longitudinal nul sur les deux surfaces supérieures (en rouge sur la figure 9.2-1). On appliquera comme conditions aux limites sur les autres surfaces (en bleu sur la figure 9.2-1) les déplacements solutions.
La couronne extérieure définit la surface maîtresse.
Le maillage (Figure 9.2-1) comporte:
448 mailles de type QUAD8;
384 mailles de type HEXA20.
Figure 9.2-a : Le maillage de la modélisation G
On notera \(\lambda\) la pression de contact calculée analytiquement, \(({U}_{x},{U}_{y},{U}_{z})\) les déplacements calculés analytiquement.
Dans le cas où les déplacements sont nuls, on définit une borne absolue égale a 2% la valeur du déplacement maximal Vmax=5.5E-03.
On calcule la valeur minimale et la valeur maximale de la pression de contact (LAGS_C) et des composantes du déplacement (DX,DY,DZ) pour les groupes de nœuds suivants:
GROUPE 1: N78 (5.79555495773817E-01, 1.55291427060109E-01, 0.00000000000000E+00),
N198 (5.79555495773817E-01, 1.55291427060109E-01, 4.00000000000000E-01),
N1151(5.79555495773817E-01, 1.55291427060109E-01, 1.99999999999678E-01)
GROUPE 2: N82 (4.24264068712436E-01, 4.24264068711421E-01, 0.00000000000000E+00),
N202 (4.24264068712436E-01, 4.24264068711421E-01, 4.00000000000000E-01),
N1139(4.24264068712436E-01, 4.24264068711421E-01, 1.99999999999678E-01)
GROUPE 3: N85 (2.29610059417922E-01, 5.54327719507241E-01, 0.00000000000000E+00),
N205 (2.29610059417922E-01, 5.54327719507241E-01, 4.00000000000000E-01),
N1130(2.29610059417922E-01, 5.54327719507241E-01, 1.99999999999678E-01)
Identification |
Référence |
Aster |
tolérance |
LAGS_C min du groupe 1 |
\(\lambda (x,y,z)\) |
-9376794.4168 |
2.10-2 |
DX min du groupe 1 |
\({U}_{x}(x,y,z)\) |
-0.0053079751381 |
2.10-2 |
DY min du groupe 1 |
\({U}_{y}(x,y,z)\) |
-0.0014125727708 |
2.10-2 |
DZ min du groupe 1 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C max du groupe 1 |
\(\lambda (x,y,z)\) |
-9376794.4168 |
2.10-2 |
DX max du groupe 1 |
\({U}_{x}(x,y,z)\) |
-0.0053079751381 |
2.10-2 |
DY max du groupe 1 |
\({U}_{y}(x,y,z)\) |
-0.0014125727708 |
2.10-2 |
DZ max du groupe 1 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C min du groupe 2 |
\(\lambda (x,y,z)\) |
-9259259.25926 |
2.10-2 |
DX min du groupe 2 |
\({U}_{x}(x,y,z)\) |
-0.0037844796198 |
2.10-2 |
DY min du groupe 2 |
\({U}_{y}(x,y,z)\) |
-0.0037579927128 |
2.10-2 |
DZ min du groupe 2 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C max du groupe 2 |
\(\lambda (x,y,z)\) |
-9259259.25926 |
2.10-2 |
DX max du groupe 2 |
\({U}_{x}(x,y,z)\) |
-0.0037844796198 |
2.10-2 |
DY max du groupe 2 |
\({U}_{y}(x,y,z)\) |
-0.0037579927128 |
2.10-2 |
DZ max du groupe 2 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C min du groupe 3 |
\(\lambda (x,y,z)\) |
-9163292.20499 |
2.10-2 |
DX min du groupe 3 |
\({U}_{x}(x,y,z)\) |
-0.0020034145592 |
2.10-2 |
DY min du groupe 3 |
\({U}_{y}(x,y,z)\) |
-0.0048020637882 |
2.10-2 |
DZ min du groupe 3 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C max du groupe 3 |
\(\lambda (x,y,z)\) |
-9163292.20499 |
2.10-2 |
DX max du groupe 3 |
\({U}_{x}(x,y,z)\) |
-0.0020034145592 |
2.10-2 |
DY max du groupe 3 |
\({U}_{y}(x,y,z)\) |
-0.0048020637882 |
2.10-2 |
DZ max du groupe 3 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
Tableau 9.3-1
Modélisation H#
Il s’agit d’une modélisation 3D. Les surfaces maîtresse et esclave en vis-à-vis sont telles que leurs maillages ne sont pas compatibles. Pour éviter d’avoir des calculs trop lents, on ne prendra que le quart de la géométrie.
Les modules de Young \({E}_{1}={E}_{2}\) et les coefficients de Poisson \({\nu}_{1}={\nu}_{2}\) sont respectivement \(1.0E9\mathit{Pa}\) et \(0.2\) . La pression appliquée sur le bord de la couronne extérieure vaut \(1.0E7+\mathrm{10E5.cos}(2\theta )(\mathit{Pa})\) , \(\theta\) étant l’angle polaire.
La pression ne varie pas dans le sens longitudinal. Pour avoir un modèle conforme aux déformations planes, on imposera un déplacement longitudinal nul sur les deux surfaces supérieures (en rouge sur la figure 10.2-1). On appliquera comme conditions aux limites sur les autres surfaces (en bleu sur la figure 10.2-1) les déplacements solutions.
La couronne extérieure définit la surface maîtresse.
Le maillage (Figure 8.2-1) comporte:
464 mailles de type QUAD8;
400 mailles de type HEXA20.
On notera \(\lambda\) la pression de contact calculée analytiquement, \(({U}_{x},{U}_{y},{U}_{z})\) les déplacements calculés analytiquement.
Dans le cas où les déplacements sont nuls, on définit une borne absolue égale a 2% la valeur du déplacement maximal Vmax=5.5E-03.
On calcule la valeur minimale et la valeur maximale de la pression de contact (LAGS_C) et des composantes du déplacement (DX,DY,DZ) pour les groupes de nœuds suivants:
GROUPE 1: N97 (5.54327719506785E-01, 2.29610059419021E-01, 0.00000000000000E+00),
N213 (5.54327719506785E-01, 2.29610059419021E-01, 4.00000000000000E-01),
N1256(5.54327719506760E-01, 2.29610059419083E-01, 1.99999999999678E-01)
GROUPE 2: N100 (4.24264068711920E-01, 4.24264068711937E-01, 0.00000000000000E+00),
N216 (4.24264068711920E-01, 4.24264068711937E-01, 4.00000000000000E-01),
N1253(5.68158077697052E-01, 1.92863679181931E-01, 3.49999999999963E-01)
GROUPE 3: N103 (2.29610059419306E-01, 5.54327719506668E-01, 0.00000000000000E+00),
N219 (2.29610059419306E-01, 5.54327719506668E-01, 4.00000000000000E-01),
N1214(2.29610059419285E-01, 5.54327719506676E-01, 1.99999999999678E-01)
Identification |
Référence |
Aster |
tolérance |
LAGS_C min du groupe 1 |
\(\lambda (x,y,z)\) |
-9355226.31353 |
2.10-2 |
DX min du groupe 1 |
\({U}_{x}(x,y,z)\) |
-0.0050526512252 |
2.10-2 |
DY min du groupe 1 |
\({U}_{y}(x,y,z)\) |
-0.0020785420526 |
2.10-2 |
DZ min du groupe 1 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C max du groupe 1 |
\(\lambda (x,y,z)\) |
-9355226.31353 |
2.10-2 |
DX max du groupe 1 |
\({U}_{x}(x,y,z)\) |
-0.0050526512252 |
2.10-2 |
DY max du groupe 1 |
\({U}_{y}(x,y,z)\) |
-0.0020785420526 |
2.10-2 |
DZ max du groupe 1 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C min du groupe 2 |
\(\lambda (x,y,z)\) |
-9366931.51625 |
2.10-2 |
DX min du groupe 2 |
\({U}_{x}(x,y,z)\) |
-0.0051922141170 |
2.10-2 |
DY min du groupe 2 |
\({U}_{y}(x,y,z)\) |
-0.0037579927128 |
2.10-2 |
DZ min du groupe 2 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C max du groupe 2 |
\(\lambda (x,y,z)\) |
-9366931.51625 |
2.10-2 |
DX max du groupe 2 |
\({U}_{x}(x,y,z)\) |
-0.0051922141170 |
2.10-2 |
DY max du groupe 2 |
\({U}_{y}(x,y,z)\) |
-0.0037579927128 |
2.10-2 |
DZ max du groupe 2 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C min du groupe 3 |
\(\lambda (x,y,z)\) |
-9163292.20499 |
2.10-2 |
DX min du groupe 3 |
\({U}_{x}(x,y,z)\) |
-0.0020034145592 |
2.10-2 |
DY min du groupe 3 |
\({U}_{y}(x,y,z)\) |
-0.0048020637882 |
2.10-2 |
DZ min du groupe 3 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
LAGS_C max du groupe 3 |
\(\lambda (x,y,z)\) |
-9163292.20499 |
2.10-2 |
DX max du groupe 3 |
\({U}_{x}(x,y,z)\) |
-0.0020034145592 |
2.10-2 |
DY max du groupe 3 |
\({U}_{y}(x,y,z)\) |
-0.0048020637882 |
2.10-2 |
DZ max du groupe 3 |
\({U}_{z}(x,y,,z)\) |
0.0 |
1.E-8 |
Tableau 10.3-1
Synthèse des résultats#
Ce cas test permet de valider la formulation contact continue en présence de surfaces de contact courbes avec des maillages linéaires et quadratiques, en 2D et 3D. Il a notamment pu permettre d’établir les ordres de convergence pour la méthode de contact continue et de vérifier une convergence en énergie de 1 et en déplacement de 2 pour les maillages linéaires, de 2 en énergie et de 3 en déplacement pour les maillages quadratiques, pour des schémas d’intégration suffisamment riches.