r5.06.03 Modélisation des chocs et du frottement en analyse transitoire par recombinaison modale#
Résumé :
Ce document décrit les lois physiques de contact avec frottement entre structures et la modélisation qui en est faite dans l’algorithme d’analyse transitoire par recombinaison modale DYNA_VIBRA (TYPE_CALCUL=”TRAN” et BASE_CALCUL=”GENE”) avec COMPORTEMENT=”DIS_CHOC”. Pour les différentes liaisons non‑linéaires de contact utilisables, on détaille le calcul des grandeurs définissant les conditions de contact.
Les schémas d’utilisation utilisés sont décrits dans [R5.06.04].
Table des matières
Relations de contact entre deux structures#
Deux relations régissent le contact entre deux structures:
La relation de contact unilatéral qui exprime la non-interpénétrabilité entre les corps solides,
la relation de frottement qui régit la variation des efforts tangentiels dans le contact. On retiendra pour les présents développements une relation simple : la loi de frottement de Coulomb.
Relation de contact unilatéral#
Soient deux structures \({\Omega}_{1}\) et \({\Omega}_{2}\) . On note \({d}_{N}^{1/2}\) la distance normale entre les structures et \({F}_{N}^{1/2}\) la force de réaction normale de \({\Omega}_{1}\) sur \({\Omega}_{2}\) (voir figure ).

Figure 2-1: Distance normale et réaction normale
La loi de l’action et de la réaction impose:
Les conditions de contact unilatéral, encore appelées conditions de Signorini (voir [1]), s’expriment de la façon suivante:

Figure 2-2: Graphe de la relation de contact unilatéral
La représentation graphique de la loi de contact unilatéral sur la figure traduit une relation force-déplacement qui n’est pas différentiable. Il n’est donc pas utilisable de façon simple dans un algorithme de calcul dynamique.
Si on restreint l’étude au cas d’une structure tubulaire en présence d’un support indéformable, on note \({d}_{n}\left({d}_{n}={d}_{N}^{1/2}\right)\) la distance normale au support, et \({F}_{n}\) la réaction de ce dernier ( \({F}_{n}={F}_{N}^{2/1}=-{F}_{N}^{1/2}\) voir figure ).

Figure 2-3: Distance normale et réaction normale entre une structure et un support
L’expression des conditions de contact normal, exprimant la limitation des déplacements due au support vaut:
Loi de frottement de Coulomb#
La loi de Coulomb exprime une limitation de l’effort tangentiel \({F}_{T}^{1/2}\) de réaction tangentielle de \({O}_{1}\) sur \({O}_{2}\) . Soit \({\dot{u}}_{T}^{1/2}\) la vitesse relative de \({\Omega}_{1}\) par rapport à \({O}_{2}\) en un point de contact et soit \(\mu\) le coefficient de frottement de Coulomb, on a (voir[1]):
et la loi de l’action et de la réaction:
La représentation graphique de la loi de Coulomb sur la figure traduit elle aussi le caractère non-différentiable de la loi et n’est donc pas simple à utiliser dans un algorithme dynamique.
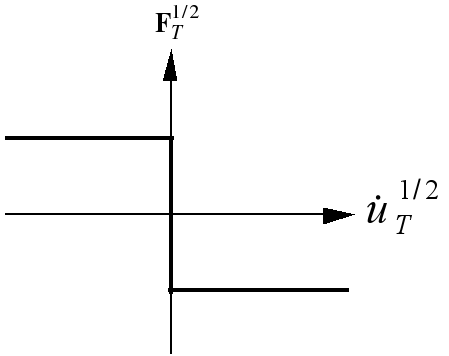
Figure 2-4: Graphe de la loi de frottement de Coulomb
Si on restreint l’étude au cas d’une structure tubulaire en présence d’un support indéformable, seul l’effort tangentiel \({F}_{T}^{2/1}={F}_{T}\) est utilisé, la loi de frottement s’exprime de la façon suivante:
Une extension courante de la loi de Coulomb, issue de l’expérience, consiste à avoir deux coefficients de frottement : l’un pour l’adhérence, noté \({\mu}_{s}\) , l’autre pour le glissement, noté \({\mu}_{d}\) , avec \({\mu}_{s}>{\mu}_{d}\) . On a alors en phase d’adhérence \(\Vert {F}_{T}\Vert \le {\mu}_{s}{F}_{n}\) et en phase de glissement \(\Vert {F}_{T}\Vert ={\mu}_{d}{F}_{n}\) .
Modélisation du contact/frottement par pénalisation#
Modèle de force normale de contact#
Le principe de la pénalisation appliqué au graphe de la figure consiste à introduire une relation univoque \({F}_{N}^{1/2}={f}_{{\varepsilon}}\left({d}_{N}^{1/2}\right)\) au moyen d’un paramètre \(\varepsilon\) . Le graphe de \({f}_{\varepsilon}\) doit tendre vers le graphe de Signorini lorsque \(\varepsilon\) tend vers zéro (voir[2]). Une des possibilités consiste à proposer une relation linéaire entre \({d}_{N}^{1/2}\) et \({F}_{N}^{1/2}\) :
Si l’on note \({K}_{N}=\frac{1}{{\varepsilon}}\) (appelée communément raideur de choc ) on retrouve la relation classique, modélisant un choc élastique:
Le graphe approché de la loi de contact avec pénalisation est sur la figure .

Figure 3-1: Graphe de la relation de contact unilatéral approchée par pénalisation
Pour tenir compte d’une éventuelle perte d’énergie dans le choc, on introduit un amortissement de choc \({C}_{N}\) . L’expression de la force normale de contact s’exprime alors par:
Où \({\dot{u}}_{N}^{1/2}\) est la vitesse normale relative de \({O}_{1}\) par rapport à \({O}_{2}\) . Pour respecter la relation de Signorini (pas d’adhérence en contact), on doit par contre vérifier a posteriori que \({F}_{N}^{1/2}\) est positive ou nulle. On ne prendra donc que la partie positive \({⟨\cdot ⟩}^{+}\) de l’expression ():
La relation complète donnant la force normale de contact qui est retenue pour l’algorithme est la suivante:
Modèle de force tangentielle de contact#
Le graphe décrivant la force tangentielle avec loi de Coulomb est non-différentiable pour la phase d’adhérence \({\dot{u}}_{T}^{1/2}=0\) . On introduit donc une relation univoque liant le déplacement tangentiel relatif \({d}_{T}^{1/2}\) et la force tangentielle \({F}_{T}^{1/2}={f}_{\xi}\left({d}_{T}^{1/2}\right)\) au moyen d’un paramètre \(\xi\) . Le graphe de \({f}_{\xi}\) doit tendre vers le graphe de Coulomb lorsque \(\xi\) tend vers zéro (voir [2]). Une des possibilités consiste à écrire une relation linéaire entre \({d}_{T}^{1/2}\) et \({F}_{T}^{1/2}\) pour une écriture incrémentale:
Avec \({\left(\cdot \right)}_{T,0}\) les quantités au pas de temps précédent. Si l’on introduit une raideur tangentielle \({K}_{T}=\frac{1}{\xi}\) , on obtient la relation:
Le graphe approché de la loi de frottement de Coulomb modélisée par pénalisation est sur la figure . Pour des raisons numériques, liées à la dissipation de vibrations parasites (voir [3]) en phase d’adhérence, on est amené à ajouter un amortissement tangentiel \({C}_{T}\) dans l’expression de la force tangentielle. Son expression finale est:
Il faut de plus que cette force vérifie le critère de Coulomb, soit:
Si ce n’est pas le cas, on corrige la force de frottement par la formule suivante:
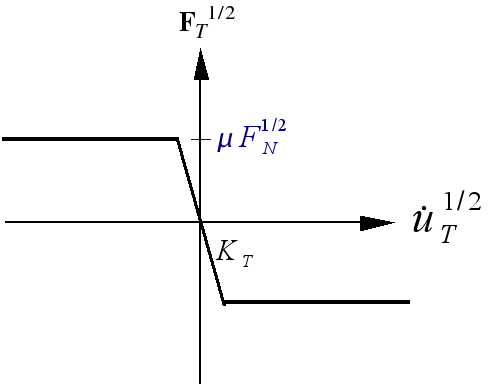
Figure 3-2: Graphe de la loi de frottement approchée par pénalisation
Dans le cas de l’extension de la loi de Coulomb avec la distinction entre le coefficient d’adhérence \({\mu}_{s}\) et le coefficient de glissement \({\mu}_{d}\) , le graphe approché de la loi est modifié (voir figure ).
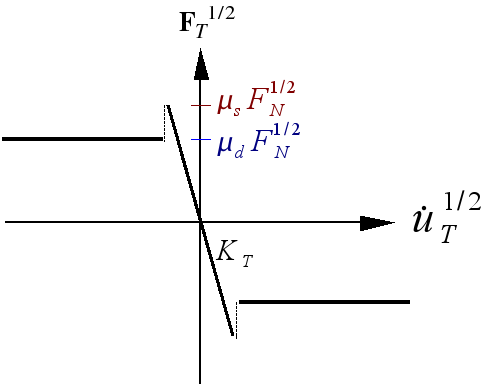
Figure 3-3: Graphe de la variante de la loi de frottement approchée par pénalisation
Types de liaisons de contact modélisées#
Les développements présentés ici concernent la mise en œuvre de liaisons non-linéaires avec contact unilatéral et frottement entre un nœud et un obstacle ou entre deux nœuds donnés.
Les nœuds en contact sont supposés appartenir à deux structures élancées de type poutre ou à une poutre et un obstacle indéformable. Les nœuds sur lesquels va porter la condition de contact sont supposés portés par la ligne moyenne des poutres.
Liaisons entre un nœud et un obstacle indéformable#
Liaisons de contact nœud sur obstacle plan#
On considère une structure élancée représentée par des éléments de type poutre. Son déplacement est limité en un point par la présence d’un obstacle constitué de deux demi-plans infinis dans la direction \(Y\) (voir figure ).

Figure 4-1: Structures élancées avec contact nœud sur plan
Pour analyser les conditions de contact, on se place dans le repère perpendiculaire à l’axe \(\mathrm{Xloc}\) , direction de la fibre neutre ou d’une génératrice de la poutre. Soit \(\mathrm{NO1}\) , le nœud de la liaison considérée sur la poutre, la géométrie de la liaison contact nœud sur plan (appelée PLAN_Y) est décrite sur la figure ().

Figure 4-2: Géométrie de la liaison nœud sur plan obstacle
Soient \(\left\lbrace \begin{array}{c}{Y}_{\mathit{loc}}\\ {Z}_{\mathit{loc}}\end{array}\right\rbrace\) les coordonnées du noeud \(\mathrm{NO1}\) dans le repère \(\left({Y}_{\mathit{loc}},{Z}_{\mathit{loc}}\right)\) , l’origine de ce repère est le point ORIG_OBST. La distance normale \({d}_{N}\) dans ce cas, en négligeant les rotations des sections s’exprime alors par:
:math:`{d}_{N}=- |
{Y}_{mathit{loc}} |
+mathit{jeu}` |
Le contact dans cette liaison est sensé avoir lieu quel que soit le décalage en \({Z}_{\mathit{loc}}\) entre les deux structures.
Le vecteur normal \(n\) dans le repère \(\left({Y}_{\mathit{loc}},{Z}_{\mathit{loc}}\right)\) a pour composantes:
Les autres quantités \({\dot{u}}_{N}\) , \({F}_{N}\) , \({\dot{u}}_{T}\) et \({F}_{T}\) sont calculées de façon générale comme précisé au [§ 3 ].
Liaisons de contact nœud sur obstacle circulaire concave#
On considère une structure élancée, représentée par des éléments de type poutre. Son déplacement est limité en un point par la présence d’un obstacle constitué d’un plan infini percé d’un trou circulaire (voir figure ).

Figure 4-3: Structures élancées avec contact nœud sur obstacle circulaire
Pour analyser les conditions de contact, on se place dans le repère perpendiculaire à l’axe \({X}_{\mathit{loc}}\) , direction de la fibre neutre ou d’une génératrice de la poutre. Soient \(\mathrm{NO1}\) , le nœud de la liaison considérée, la géométrie de la liaison de contact nœud sur cercle (appelée CERCLE) est décrite sur la figure ().

Figure 4-4: Géométrie de la liaison nœud obstacle circulaire
Soient \(\left\lbrace \begin{array}{c}{Y}_{\mathit{loc}}\\ {Z}_{\mathit{loc}}\end{array}\right\rbrace\) les coordonnées du noeud \(\mathrm{NO1}\) dans le repère \(\left({Y}_{\mathit{loc}},{Z}_{\mathit{loc}}\right)\) , l’origine de ce repère est le point ORIG_OBST. La distance normale \({d}_{N}\) dans ce cas, en négligeant les rotations des sections s’exprime alors par:
On pose comme vecteur normal \(n\) le vecteur:
Avec \(\text{jeu}\) une distance strictement positive. Les autres quantités \({\dot{u}}_{N}\) , \({F}_{N}\) , \({\dot{u}}_{T}\) et \({F}_{T}\) sont calculées de façon générale comme précisé au [§ 3 ].
Liaisons de contact nœud sur obstacle concave discrétisé par segments#
On considère une structure élancée, représentée par des éléments de type poutre. Son déplacement est limité en un point par la présence d’un obstacle constitué d’un plan infini percé d’un trou de forme concave quelconque pouvant être discrétisée en coordonnées polaires par segments (voir figure ).

Figure 4-5: Géométrie de la liaison nœud sur obstacle concave discrétisé
Soient \(\left\lbrace \begin{array}{c}{Y}_{\mathit{loc}}\\ {Z}_{\mathit{loc}}\end{array}\right\rbrace\) les coordonnées du noeud \(\mathit{NO}1\) dans le repère \(\left({Y}_{\mathit{loc}},{Z}_{\mathit{loc}}\right)\) , l’origine de ce repère est le point ORIG_OBST. On recherche la facette de contact la plus proche du nœud \(\mathrm{NO1}\) , le vecteur normal \(n\) est défini comme le vecteur orthogonal direct à la facette sur la figure .

Figure 4-6: Définition du repère pour le cas du nœud sur obstacle concave discrétisé
Soit \(\mathit{PNO}1\) la projection du nœud \(\mathit{NO}1\) sur la facette, la distance normale \({d}_{N}\) dans ce cas vaut:
Les autres quantités \({\dot{u}}_{N}\) , \({F}_{N}\) , \({\dot{u}}_{T}\) et \({F}_{T}\) sont calculées de façon générale comme précisé au [§ 3 ].
Liaisons entre deux nœuds de deux structures déformables#
Liaisons de contact plan sur plan#
Les contacts entre assemblages combustible, au niveau des grilles de mélange, constituent un exemple de contact plan sur plan (voir figure ). On considère donc deux structures élancées, pouvant être modélisées par des poutres de section rectangulaire au niveau des zones de contact.

Figure 4-7: Structures élancées avec contact plan sur plan
Pour analyser les conditions de contact, on se place dans le repère perpendiculaire à l’axe \({X}_{\mathit{loc}}\) , direction de la fibre neutre des poutres. Soient \(\mathrm{NO1}\) et \(\mathrm{NO2}\) , les deux nœuds de la liaison considérée, la géométrie de la liaison contact plan sur plan (appelée BI_PLAN_Y) est décrite sur la figure .

Figure 4-8: Géométrie de la liaison plan sur plan
Soient \(\left\lbrace \begin{array}{c}{Y}_{\mathit{loc}}^{i}\\ {Z}_{\mathit{loc}}^{i}\end{array}\right\rbrace\) les coordonnées du noeud \({\mathit{NO}}^{i}\) dans le repère \(\left({Y}_{\mathit{loc}},{Z}_{\mathit{loc}}\right)\) , l’origine de ce repère est le point ORIG_OBST. (ORIG_OBST peut être fourni par l’utilisateur, par défaut ORIG_OBST est choisi comme le milieu des nœuds \(\mathrm{NO1}\) et \(\mathrm{NO2}\) ). La distance normale \({d}_{N}\) dans ce cas, en négligeant les rotations des sections s’exprime alors par:
:math:`{d}_{N}=- |
{Y}_{mathit{loc}}^{1}-{Y}_{mathit{loc}}^{2} |
-{D}_{1}-{D}_{2}` |
\({D}_{1}\) et \({D}_{2}\) sont des distances strictement positives. Le contact dans cette liaison est sensé avoir lieu quel que soit le décalage en \({Z}_{\mathit{loc}}\) entre les deux structures. Le vecteur normal \(n\) dans le repère \(\left({Y}_{\mathit{loc}},{Z}_{\mathit{loc}}\right)\) a pour composantes:
Les autres quantités \({\dot{u}}_{N}\) , \({F}_{N}\) , \({\dot{u}}_{T}\) et \({F}_{T}\) sont calculées de façon générale comme précisé au [§ 3 ].
Liaisons de contact cercle sur cercle#
Si l’on considère maintenant deux cylindres de section circulaire, modélisés par des éléments de poutre. La liaison de contact entre deux nœuds des lignes moyennes est supposée avoir lieu entre deux cercles comme le montre la figure .

Figure 4-9: Structures élancées avec contact cercle sur cercle
On se place dans le repère perpendiculaire à l’axe \({X}_{\text{loc}}\) parallèle à une génératrice des cylindres. Soient \(\mathrm{NŒUD1}\) et \(\mathrm{NŒUD2}\) , les deux nœuds de la liaison considérée, la géométrie de la liaison contact cercle sur cercle (appelée BI_CERCLE) est décrite sur la géométrie de la figure .

Figure 4-10: Géométrie de la liaison cercle sur cercle
La distance normale \({d}_{N}\) a pour expression:
On pose comme vecteur normal de \({\Omega}_{1}\) vers \({O}_{2}\) le vecteur:
Utilisation des forces non-linéaires localisées de choc et frottement en recombinaison modale#
Les forces non-linéaires exprimées ci-dessus sont des fonctions explicites de la position et de la vitesse des nœuds sur lesquels portent les conditions de contact. On choisit d’utiliser la technique des pseudo-forces pour résoudre le problème dynamique projeté. Si le système dynamique direct s’écrit:
La technique des pseudo-forces consiste à projeter sur la base du système linéaire et à maintenir les forces non-linéaires au second membre. Le système dynamique projeté prend la forme:
Le problème projeté est intégré numériquement par un schéma explicite. Des préconisations sont données dans [U2.06.04] pour le choix de cette base.
Précision sur l’utilisation des non‑linéarités de choc avec frottement#
Les non-linéarités de choc entre une structure et un obstacle ou entre deux structures ont été introduites dans les algorithmes de recombinaison modale de Code_Aster : un algorithme d’Euler d’ordre un et de Devogelaere d’ordre quatre (voir [R5.06.04]).
Ces algorithmes sont utilisés par l’opérateur DYNA_VIBRA. Le type de liaison de choc entre les deux nœuds est précisé par une commande spécifique : DEFI_OBSTACLE.
Définition du type de liaison de choc#
Le type de liaison de choc est une notion générique, qui ne comporte aucune information physique comme une distance ou dimension quelconque. Le type de liaison précise simplement la forme géométrique de la liaison considérée.
Les types de liaison avec choc à deux nœuds acceptés par la commande DEFI_OBSTACLE sont décrits par les mots-clés suivants: PLAN_Y, PLAN_Z, CERCLE, BI_PLAN_Y, BI_PLAN_Z ou BI_CERCLE (voir figure ).

Figure 6-1: Géométries des liaisons de choc
Le préfixe BI_ précise qu’il s’agit d’une liaison à deux nœuds.
Définition du repère local pour les conditions de contact#
Les structures traitées, étant considérées comme cylindriques élancées (section circulaire ou rectangulaire), sont modélisées par des éléments de poutre. Le contact est traité dans un plan perpendiculaire à la direction \({X}_{\text{loc}}\) de la génératrice des cylindres.
Pour définir complètement ce changement de repère, on introduit un repère local \(({X}_{\text{loc}},{Y}_{\text{loc}},{Z}_{\text{loc}})\) . Le vecteur \({X}_{\text{loc}}\) est le vecteur à trois composantes fournies derrière le mot-clé NORM_OBST.
A l’aide des deux premiers angles nautiques, on passe de façon unique du repère global \((X,Y,Z)\) à un repère ayant \({X}_{\text{loc}}\) comme premier vecteur de base (voir figure ). Une troisième rotation dont l’angle est fourni derrière le mot clé ANGL_VRIL donne une correspondance unique entre le repère principal et le repère local.
Attention :
l’orientation de ce repère local est importante car c’est dans ce repère que sont analysées les conditions de contact, et sont fournies les positions locales des nœuds de choc.

Figure 6-2: Rotations définissant le repère local
Figure 6.2-a : Rotations définissant le repère local
L’opérande ORIG_OBST permet de définir l’origine du repère local \((\text{Orig},{X}_{\text{loc}},{Y}_{\text{loc}},{Z}_{\text{loc}})\) . Cet opérande est facultatif et en principe ne sera pas utilisé dans le cas des chocs entre deux nœuds. Le code considère alors que l’origine est située au milieu du segment reliant les deux nœuds.
Définition des nœuds des liaisons#
On précise, derrière les mot-clés NOEU_1 et NOEU_2, les noms des deux nœuds des structures sur lesquels porteront les conditions de choc. S’il s’agit d’une liaison entre un nœud et un obstacle, seul NOEU_1 est renseigné.
Définition des dimensions caractéristiques des sections#
L’opérande JEU est utilisé pour les conditions de contact entre un nœud et un obstacle.
Les opérandes DIST_1 et DIST_2 permettent de préciser les dimensions caractéristiques des sections des structures entourant les nœuds de choc. Dans le cas des liaisons plan sur plan, ce sont les épaisseurs de matière entourant le nœud de choc dans la direction considérée.
Dans le cas de liaisons cercle sur cercle, il s’agit des rayons des sections entourant les nœuds de choc.
Définition des paramètres de contact#
Les paramètres raideurs et amortissement de choc ont été introduits au § 3.1 et § 3.2 , on précise ici les mots-clés permettant de les définir pour une liaison donnée:
L’opérande RIGI_NOR est obligatoire, il permet de donner la valeur de raideur normale de choc \({K}_{N}\) .
L’opérande AMOR_NORest facultatif, il permet de donner la valeur d’amortissement normal de choc \({C}_{N}\)
L’opérande RIGI_TAN est facultatif, il permet de donner la valeur de raideur tangentielle \({K}_{T}\) ;
L’opérande AMOR_TANest facultatif, il permet de donner la valeur d’amortissement tangentielle de choc \({C}_{T}\) ;
L’opérande COULOMB permet de donner la valeur du coefficient de Coulomb.
Nota :
Si une raideur \({K}_{T}\) est définie et que le mot-clé AMOR_TANest absent, le code calcule un amortissement optimisé de façon à minimiser les oscillations résiduelles en adhérence (voir [3] ):
\({C}_{T}=2\cdot \sqrt{({k}_{i}+{K}_{T}).{m}_{i}}-2\cdot {x}_{i}\cdot \sqrt{{k}_{i}.{m}_{i}}\) ,
où \(i\) est l’indice du mode prépondérant à la direction tangentielle dans la réponse de la structure ( la plus grande masse modale normalisée par le déplacement tangentiel ).
Utilisation d’un choc unidirectionnel#
Pour les obstacles de type PLAN_Y, PLAN_Z,BI_PLAN_Y ouBI_PLAN_Z il est possible d’activer le frottement dans une seule direction du plan de l’obstacle. L’opérande UNIDIRECTIONNEL permet d’activer ce frottement unidirectionnel pour annuler le frottement dans la direction donnée par l’opérande NORM_OBST. Cette option est utilisable aussi bien avec le frottement de type COULOMB qu’avec le frottement de type COULOMB_STAT_DYNA.
Avec un frottement COULOMB , le coefficient de frottement vaut zérosuivant l’axe renseigné dans NORM_OBST et mudans la direction perpendiculaire.
Avec un frottement COULOMB_STAT_DYNA, le coefficient d’adhérence vaut zérosuivant l’axe renseigné dans NORM_OBST et musdans la direction perpendiculaire. Le coefficient de glissement vaut zérosuivant l’axe renseigné dans NORM_OBST et muddans la direction perpendiculaire.