r7.01.40 Modèle de comportement LKR#
Résumé:
Le modèle de comportement LKR est une évolution thermomécanique du modèle élasto(visco)plastique LETK [1] et [2]. Son développement et son intégration numérique sont le fruit des travaux de thèse de S. Raude [3].
Ce document présenteles grandes lignes conceptuelles du modèle et les principales équations qui régissent son fonctionnement.Le premier paragraphe introduit les grands concepts du modèle, essentiels à la compréhension du second paragraphe dans lequel sont présentées ses principales équations issues de [3].Le dernier paragraphe revient brièvement sur les grandes lignes de l’intégration numérique du modèle.
Extension thermomécanique du modèle LETK (modèle LKR)#
L’objectif de ce paragraphe est de présenter les évolutions apportées au modèle de comportement LETK, que ce soit sur la partie mécanique du modèle ou sur l’intégration des effets de la température. L’intégralité des équations constitutives du modèle est présentée dans ce paragraphe. Quelques commentaires seront formulés concernant les évolutions apportées au modèle LETK et l’intégration des effets de la température et de l’anisotropie.
Le modèle LKRpeut être couplé aux équations classiques de la thermo-poro-élasticité au sens de [14] et [15]. Les équations de couplage ne sont pas détaillées dans ce document. Pour plus d’informations, voir[14].
Partition du tenseur des déformations#
Le tenseur des déformations est divisé en quatre parties. Le tenseur des déformations élastiques se décompose en une partie mécanique, \({\epsilon}^{m,e}\) , et en une partie thermique, \({\epsilon}^{T,e}\) . Les déformations irréversibles se décomposent en une partie plastique (instantanée), \({\epsilon}^{p}\) , et en une partie viscoplastique (différée), \({\epsilon}^{\mathit{vp}}\) . Sous l’hypothèse des petites perturbations, cette décomposition est également valable pour une écriture incrémentale:
La notation \(\dot{x}\) représente la dérivée par rapport au temps de la grandeur \(x\) . La notion de temps physique est uniquement valable pour le mécanisme viscoplastique. La notion de temps pour les mécanismes élastique et plastique fait référence à un pas de temps d’intégration numérique.
Mécanisme élastique#
L’incrément de déformation élastique mécanique est lié à l’incrément de contrainte par une relation élastique linéaire anisotrope (isotrope transverse, ELAS_ISTR, ou orthotrope, ELAS_ORTH):
Où \({D}^{g}\) est le tenseur de Hooke d’ordre 4 dans le repère global du chargement (X,Y,Z).
Pour un matériau anisotrope, les paramètres définis dans la commande DEFI_MATERIAU [31] font référence aux constantes élastiques dans le repère local (L,T,N) [32]. Le changement de repère (local vers global), transparent pour l’utilisateur, est réalisé dans les routines d’intégration du modèle de comportement. Pour le tenseur de Hooke, écrit sous la forme d’une matrice 6x6, il vient:
Où \({D}^{l}\) est le tenseur de Hooke dans le repère local et \({P}_{66}^{\mathit{lg}}\) est la matrice de passage du repère local vers le repère global. Les tenseurs de Hooke pour des matériaux orthotrope et élastique transverse sont définis dans [32]. La matrice \({P}_{66}^{\mathit{lg}}\) fait intervenir les trois angles de rotation autour des axes du repère global \((\alpha ,\beta ,\gamma )\) (resp. autour de Z, Y et X). Ces angles doivent être définis dans le mot clé ANGLE_REP du mot clé facteur MASSIF (commande AFFE_CARA_ELEM). Pour pouvoir utiliser le modèle LKR, un (et un seul) des deux mots clé ELAS_ISTR et ELAS_ORTH doit être présent dans la commande DEFI_MATERIAU. Si le modèle LKR est utilisé conjointement à un kit THM, il faut obligatoirement utiliser le mot clé ELAS_ORTH pour une modélisation 2D (D_PLAN ou AXIS) et le mot clé ELAS_ISTR en 3D.
Les modules élastiques des roches tendres et dures ont tendance à légèrement diminuer avec la température. Cependant, cette évolution est moins franche pour des matériaux argileux, fortement dépendants de paramètres extérieurs tels que l’humidité relative, et négligeable par rapport aux effets de la pression de confinement dans les gammes de températures couramment envisagées. Les effets de la température sur les modules élastiques ne sont donc pas pris en compte dans le modèle LKR.
L’incrément de déformation élastique thermique , \({\dot{\epsilon}}^{T,e}\) , est lié à l’incrément de température \(\dot{T}\) , par la relation:
Avec \({\alpha}^{g}\) tenseur d’ordre 2 des coefficients de dilatation thermique dans le repère global . Dans la commande DEFI_MATERIAU, l’utilisateur définit les coefficients de dilatation thermique dans le repère local du matériau (ALPHA_L, ALPHA_T, ALPHA_N). Le passage de \({\alpha}^{l}\) vers \({\alpha}^{g}\) s’opère dans les routines d’intégration du modèle (même démarche que dans la relation mais avec des matrices de rotation «classiques» 3x3).
Remarque: les paramètres élastiques sont, en première approximation, supposés indépendant de la température.
Mécanisme plastique#
Expression du critère de plasticité#
L’expression générale du critère de plasticité reste inchangée par rapport au critère proposé par [2] :
Les quantités \({a}^{p}\) , \({s}^{p}\) et \({m}^{p}\) sont les paramètres d’écrouissage du mécanisme plastique. Les expressions de ces paramètres sont détaillées dans le paragraphe § 2.3.2 Nous laissons le lecteur se référer à [2] ou à [16] pour plus de détails sur la signification physique de ces paramètres. \(s\) peut être associé à un terme de cohésion (un matériau est supposé intact si \(s=1\) et granulaire si \(s=0\) ), \(m\) peut être assimilé à un terme de friction ou de frottement définissant la pente du critère dans le plan des contraintes principales et \(a\) peut être assimilé à un terme de dilatance [1]. On note \({\sigma}_{\mathit{eq}}=\sqrt{3{J}_{2}}=\sqrt{\frac{3}{2}s:s}\) la contrainte équivalente de von Mises et \({\sigma}_{c}\) (SIGMA_C) est la résistance à la compression simple. La fonction \(H(\theta )\) traduit l’influence du troisième invariant du tenseur des contraintes sur la forme du critère de plasticité dans le plan déviatorique, ou plan \(\pi ` (plan de normale :math:`p'\) ). \(\theta ` est l'angle de Lode (voir ()). Cette fonction a été modifiée pour permettre de garantir la convexité du critère *L&K* dans le plan :math:\)pi ` pour tout jeu de paramètres matériau. Les recherches menées dans [3] ont permis d’aboutir à une nouvelle expression inspirée des travaux de [17]:
La constante \(\beta ` (BETA) est fixée à :math:`1,5\) et \(\gamma ` (GAMMA) est une constante matériau qui varie entre :math:`0\) et \(1\) . Pour \(\gamma =0\) , le critère de plasticité est indépendant de \(\theta ` (critère de type Drucker-Prager). Pour :math:\)gamma =1` , nous retrouvons le critère de Mohr-Coulomb. La Figure présente l’évolution du critère de plasticité dans le plan \(\pi ` pour plusieurs valeurs des constantes :math:\)beta ` et \(\gamma ` . La relation () a l'avantage d'introduire une seule constante matériau, :math:\)gamma ` , et de garantir la convexité du critère pour \(0\le \gamma <1\) . :math:`gamma ` peut, par exemple, être déterminé en identifiant la résistance maximale atteinte lors d’essais d’extension.
Remarque : d’autres valeurs pour \(\beta ` sont possibles et l'impact de ce choix est présenté sur la Figure . Dans tous les cas, le critère reste convexe pour :math:`0\le \gamma <1\) .
Figure 2.1: Évolution du critère de plasticité dans le plan \(\pi ` pour :math:\)beta in leftlbrace 0,5;1;1,5;2rightrbrace` et \(\gamma \in \left\lbrace 0;0,5;0,9;1\right\rbrace\)
Paramètres d’écrouissage#
Les paramètres d’écrouissage \({a}^{p}\) , \({s}^{p}\) et \({m}^{p}\) sont définis comme des fonctions de la variable d’écrouissage du mécanisme plastique, que nous noterons \({\xi}^{p}\) , et de la température \(T\) . L’expression de \({\xi}^{p}\) sera détaillée dans le paragraphe § 2.6 . Les valeurs prises par ces fonctions traduisent l’évolution du domaine d’élasticité entre les différents seuils présentés sur les Figures et . Cependant, par rapport au cas mécanique, ces seuils ne sont plus statiques; ils évoluent en fonction de la température.
Nous distinguerons trois phases. La première phase correspond à un écrouissage positif du domaine d’élasticité entre la limite d’élasticité initiale et le seuil de pic (Figure). Les deuxième et troisième phases correspondent à un écrouissage négatif entre (1) le seuil de pic et le seuil intermédiaire et (2) le seuil intermédiaire et le seuil résiduel (Figure).
Nous utiliserons le terme de surface plastique ou surface du mécanisme plastique pour désigner la frontière du domaine d’élasticité actuel du mécanisme plastique.
Entre la limite d’élasticité initiale et le seuil de pic#
Le domaine d’élasticité évolue dans un premier temps entre la limite d’élasticité initiale, ou seuil d’endommagement, et le seuil de pic (numéro \(2\) sur Figure ).
Figure 2.2: Évolution de la surface plastique entre la limite d’élasticité initiale (seuil d’endommagement), et le seuil de pic (de résistance maximale)
Entre ces deux seuils, les paramètres d’écrouissage évoluent comme suit :
Les indices \([0]\) et \([1]\) désignent respectivement les valeurs prises par les paramètres \({\xi}^{p}\) , \({s}^{p}\) et \({m}^{p}\) sur les seuils d’endommagement et de pic.
La résistance maximale des géomatériaux diminue non-linéairementavec la température. Cette évolution est prise en compte en faisant dépendre \({s}_{[1]}\) et \({m}_{[1]}\) de \(T\) :
Les coefficients \({m}_{[1]}^{0}\) (M_1), \({r}^{m}\) (-R_M) et \({r}^{s}\) (-R_S) sont des paramètres matériau, \({T}_{0}\) est une température de référence et \(T\) est la température à un instant \(t\) . Les paramètres \({r}^{m}\) et \({r}^{s}\) traduisent l’influence de la température sur la résistance maximale. Ces constantes doivent être strictement négatives (R_M et R_S doivent être strictement positifs) et respecter la condition \({r}^{s}\le {r}^{m}\) . La Figure présente l’évolution des paramètres \({s}_{[1]}\) et \({m}_{[1]}\) et du seuil de pic en fonction la température.
Figure 2.3: Influence de la température sur les paramètres \({s}_{[1]}\) et \({m}_{[1]}\) et sur le seuil de pic dans le plan des invariants du tenseur des contraintes \(\left\lbrace p',q\right\rbrace\) .
Conformément au cadre fixé par [2], on a \({s}_{[1]}^{0}=1\) ; le terme de cohésion estmaximal sur le seuil de pic à température ambiante.
Peu de données expérimentales existent concernant l’influence de la température sur la position et la forme de la limite d’élasticité initiale. On fait l’hypothèse qu’elle évolue de la même manière que le seuil de résistance maximale:
Le coefficient \({m}_{[0]}^{0}\) (M_0) est un paramètre matériau. Le paramètre \({s}_{[0]}\) est déterminé de manière analytique en supposant que le rapport entre les limites d’élasticité initiales en compression et en traction est égal à \(10\) (voir équation ()). Cette valeur est couramment utilisée comme rapport entre les résistances maximales en compression et en traction des roches et des bétons. Par simplification, elle estici extrapolée au cas de la limite d’élasticité initiale:
Le paramètre \({s}_{[0]}\) varie également avec la température via \({m}_{[0]}\) . Le paramètre \({\xi}_{[1]}\) de l’équation ()contrôle l’abscisse du pic de résistance dans le plan \({s}_{[0]}={\left(\frac{{m}_{[0]}\zeta }{1-{\zeta}^{2}}\right)}^{2}\) où \({\epsilon}_{\mathit{ax}}\) représente la déformation axiale d’un échantillon lors d’un essai de compression triaxiale. La température peut influencer la position du pic de résistance. Inspirés des travaux de [18], on proposede faire évoluer \({\xi}_{[1]}\) avec la température comme suit :
Le coefficient \({\xi}_{[1]}^{0}\) (XI_1) est un paramètre matériau qui contrôle l’abscisse du pic de résistance à température ambiante et \({r}_{[1]}^{x}\) (R_X1) est un paramètre matériau strictement positif qui traduit l’évolution de cet abscisse en fonction de la température. Enfin, \({v}_{1}\) (V_1) est un paramètre matériau strictement supérieur à \(1\) qui influence la vitesse d’écrouissage de la surface du mécanisme plastique entre les seuils d’endommagement et de pic (voir Figure ).
Les paramètres matériau introduits par les relations d’écrouissage entre les seuils d’endommagement et de pic sont les suivants:
Paramètre matériau |
Intervalle de définition |
\({m}_{[0]}^{0}\) |
\({\mathrm{ℝ}}^{+}\) |
\({m}_{[1]}^{0}\) |
\(\left[{m}_{[0]}^{0},+\infty \right[\) |
\({r}^{m}\) |
\([{r}^{s},0]\) |
\({r}^{s}\) |
\(\left]-\infty ,{r}^{m}\right]\) |
\({\xi}_{[1]}^{0}\) |
\({\mathrm{ℝ}}^{+}\) |
\({r}_{[1]}^{x}\) |
\({\mathrm{ℝ}}^{+}\) |
\({v}_{1}\) |
\(\left]1,+\infty \right[\) |
Tous ces paramètres peuvent être déterminés relativement facilement à partir de résultats d’essais de compression triaxiale à températures ambiante et élevée :
Le paramètre \({m}_{[1]}^{0}\) s’obtient en ajustant le seuil de pic sur les résistances maximales obtenues pour plusieurs pressions de confinement à température ambiante.
Les paramètres \({r}^{s}\) et \({r}^{m}\) sont déterminés en ajustant le seuil de pic sur l’ensemble des résistances maximales obtenues pour plusieurs pressions de confinement et plusieurs températures.
\({\xi}_{[1]}^{0}\) s’obtient en déterminant les abscisses des pics de résistance dans le plan \({s}_{[0]}={\left(\frac{{m}_{[0]}\zeta }{1-{\zeta}^{2}}\right)}^{2}\) pour plusieurs pressions de confinement à température ambiante.
\({r}_{[1]}^{x}\) peut être déterminé en ajustant les abscisses des pics de résistance dans le plan \({s}_{[0]}={\left(\frac{{m}_{[0]}\zeta }{1-{\zeta}^{2}}\right)}^{2}\) pour plusieurs pressions de confinement et plusieurs températures.
\({v}_{1}\) peut être déterminé en ajustant la partie pré-pic des courbes contrainte-déformation axiale à température ambiante.
\({m}_{[0]}^{0}\) peut être déterminé en identifiant le niveau de contrainte pour lequel des déformations irréversibles apparaissent. Par manque de données expérimentales, [2] et [19] proposent de fixer la limite d’élasticité à confinement nul à 30% de la résistance à la compression simple. Ici, cette hypothèse implique directement que \({m}_{[0]}^{0}\approx 3\) . Cette valeur semble correcte pour des roches dures mais trop élevée pour des roches tendres et des sols.
Figure 2.4: Influence des paramètres \({\xi}_{[1]}^{0}\) , \({\xi}_{[2]}^{0}\) , \({v}_{1}\) et \({v}_{2}\) sur la position et la forme des courbes contrainte-déformation. Les lignes tiretées correspondent à un état de contrainte qui se trouve sur le seuil de pic. Les lignes en pointillés correspondent à un état de contrainte qui se trouve sur le seuil intermédiaire.
Entre le seuil de pic et le seuil intermédiaire#
Le domaine d’élasticité du mécanisme plastique s’écrouit ensuite négativement entre le seuil de pic et le seuil intermédiaire (numéro \(3\) sur la Figure ).
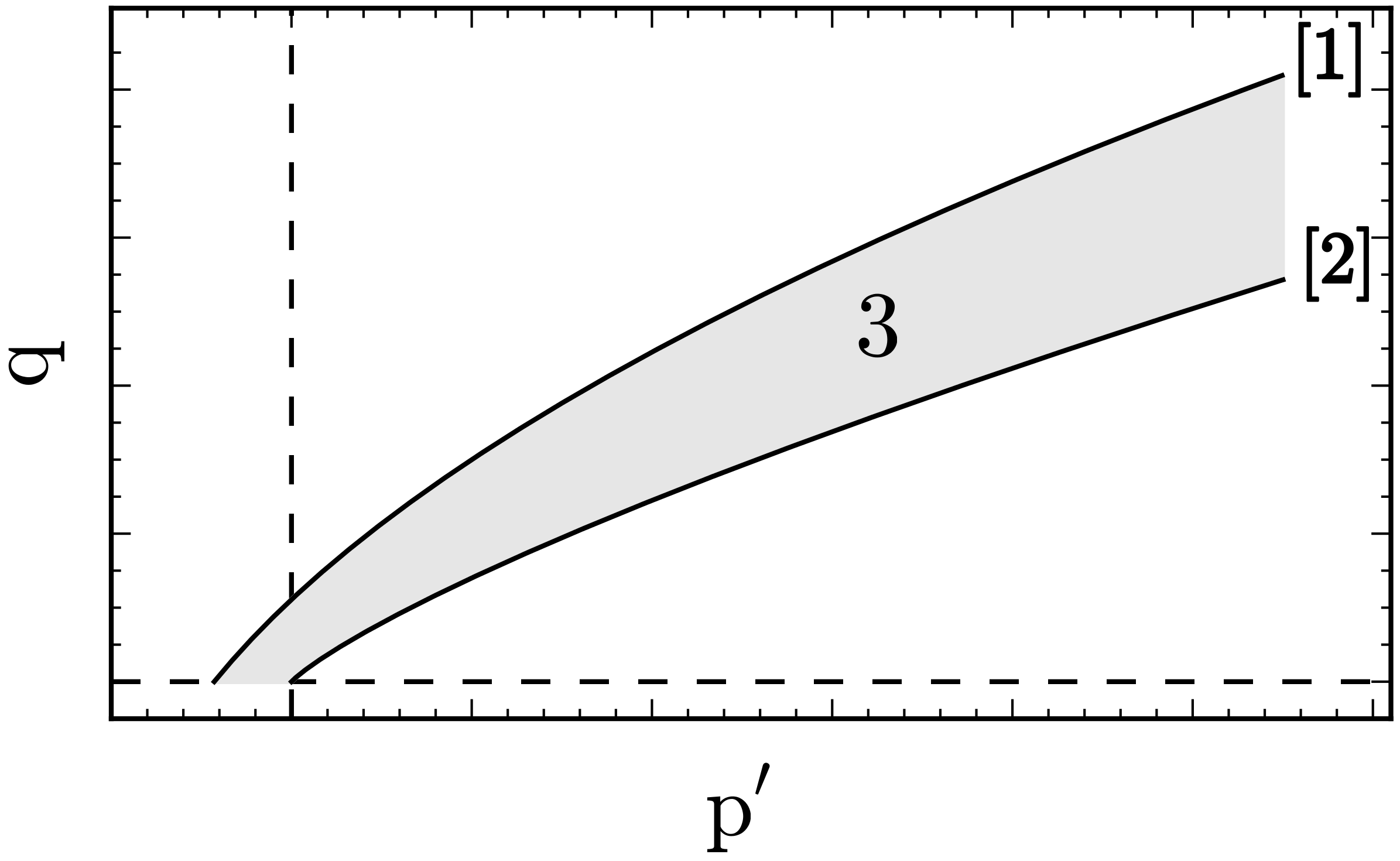
Figure 2.5: Évolution de la surface plastique entre le seuil de pic, indicé et le seuil intermédiaire , indicé.
Entre ces deux seuils, les paramètres d’écrouissage évoluent comme suit :
Les indices \([1]\) et \([2]\) désignent respectivement les valeurs prises par les paramètres \({a}^{p}\) , \({s}^{p}\) , \({m}^{p}\) et \({\xi}^{p}\) sur les seuils de pic et intermédiaire. Le paramètre \({m}^{p}\) est déduit des expressions de \({a}^{p}\) et \({s}^{p}\) en notant \(\left\lbrace {p}_{i},{q}_{i}\right\rbrace\) le point d’intersection entre les seuils de pic, intermédiaire et résiduel dans le plan \(\left\lbrace p',q\right\rbrace\) (Figure ) et en écrivant que ce point appartient à la fois au seuil de pic et à toute surface entre le seuil de pic et le seuil intermédiaire (pour \(\theta =0\) ).
\({p}_{i}\) correspond à ce que nous appelons pression de transition entre des comportements fragile et ductile . \({q}_{i}\) est l’ordonnée correspondante. Dans de nombreux modèles basés sur un formalisme de type Cam Clay, la pression de transition, assimilée à la moitié de la pression de préconsolidation initiale, est un paramètre matériau. Ce paramètre est couramment déterminé à partir de résultats d’essais oedométriques. Ici, nous pouvons définir de manière équivalente \({p}_{i}\) ou \({q}_{i}\) comme paramètre du modèle car il existe une relation analytique entre ces deux quantités (pour \(\theta =0\) ):
On a choisi de fixer \({q}_{i}\) .
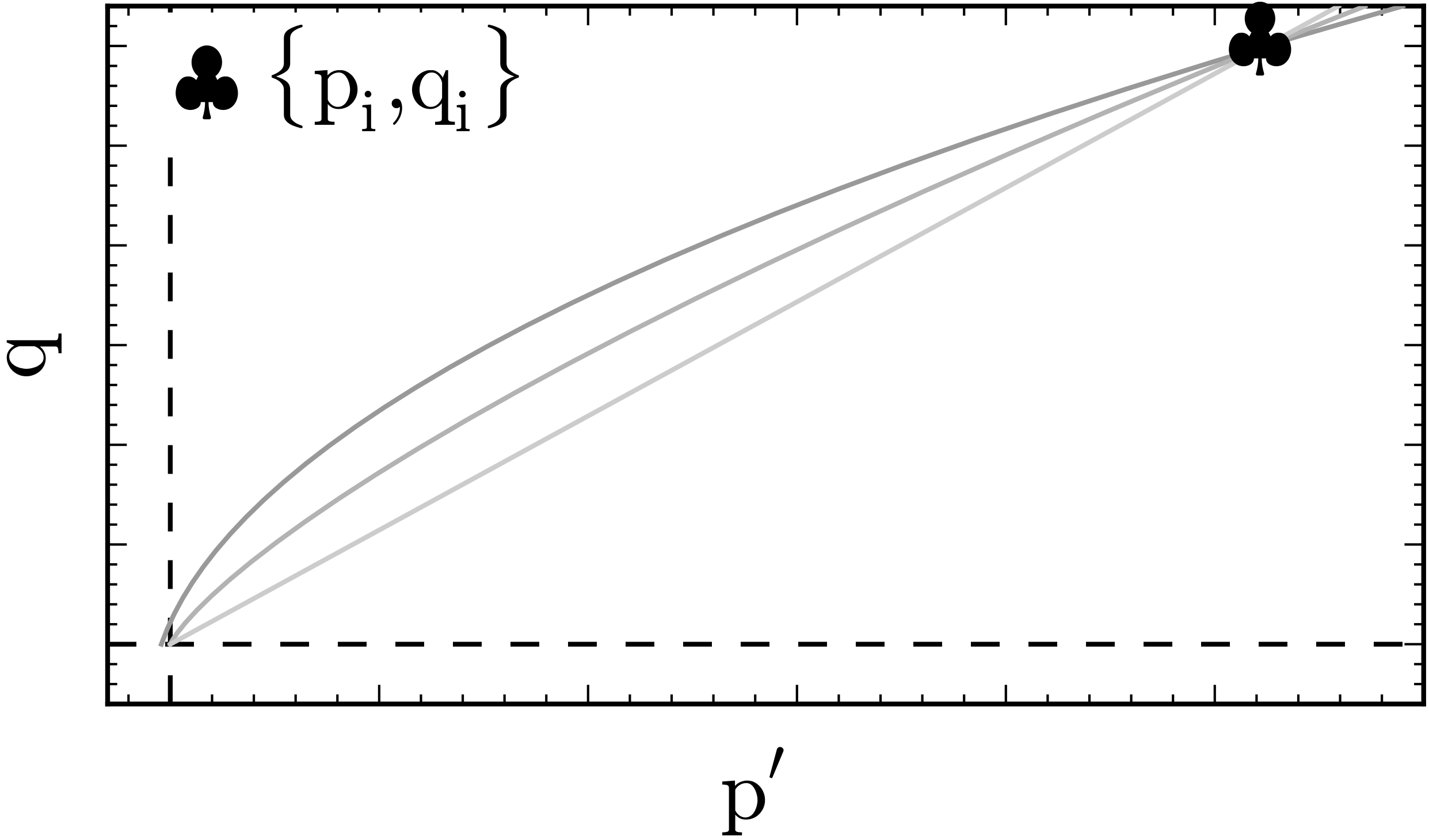
Figure 2.6: Localisation du point d’intersection entre les seuils de pic, intermédiaire et résiduel.
La pression de préconsolidation, et donc la pression de transition entre des comportements fragile et ductile, diminue significativement avec la température. Pour reproduire ce phénomène, \({q}_{i}\) , qui intervient dans l’expression de la fonction \({m}^{p}\) (équation ), doit dépendre de la température. En s’inspirant des travaux réalisés par [20] et [21], on propose l’expression suivante:
Les coefficients \({q}_{i}^{0}\) (Q_I) et \({r}^{q}\) (R_Q) sont des paramètres matériau strictement positifs. La Figure présente l’évolution de \({p}_{i}\) et \({q}_{i}\) en fonction de la température.
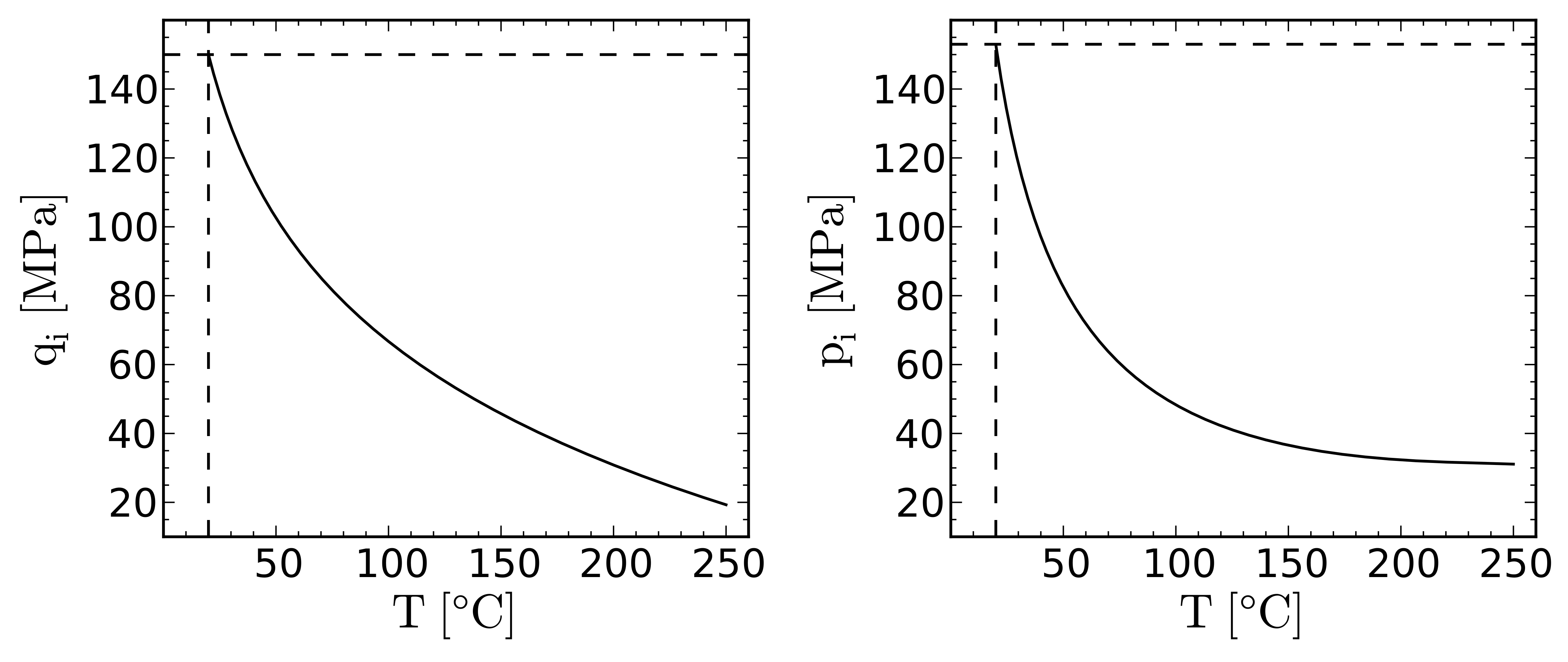
Figure 2.7: Évolution des grandeurs \({p}_{i}\) et \({q}_{i}\) en fonction de la température.
La surface du mécanisme plastique coïncide avec le seuil intermédiaire lorsque \({\xi}^{p}={\xi}_{[2]}\) (équation ). Le paramètre \({\xi}_{[2]}\) contrôle en quelque sorte la quantité d’écrouissage produit entre le seuil de pic et le seuil intermédiaire. Une augmentation de \({\xi}_{[2]}\) à \({\xi}_{[1]}\) constant stabilise la chute de résistance en régime post-pic (Figure ).
Par analogie avec les effets qu’induisent une augmentation de la pression de confinement, une augmentation de température stabilise le comportement post-pic. Nous pensons que ce phénomène peut partiellement être reproduit par l’évolution du paramètre \({q}_{i}\) (équation ). Cependant, si le paramètre \({\xi}_{[1]}\) est autorisé à croître avec la température (équation ), \({\xi}_{[2]}\) doit obligatoirement suivre la même évolution à la même vitesse ou plus rapidement. Dans le cas contraire, la chute de résistance devient de plus en plus brutale au fur et à mesure que \({\xi}_{[1]}\) augmente avec la température. La même loi d’évolution que pour le paramètre \({\xi}_{[1]}\) est donc proposée pour \({\xi}_{[2]}\) :
Les coefficients \({\xi}_{[2]}^{0}\) (XI_2) et \({r}_{[2]}^{x}\) (R_X2) sont des paramètres matériau strictement positifs. Le paramètre \({a}_{[2]}\) (A_2) de l’équation (), strictement compris entre \(0,5\) et \(1\) , contrôle la courbure du seuil intermédiaire. Si \({a}_{[2]}=1\) , le seuil intermédiaire est confondu avec le seuil résiduel. Ce paramètre intervient également dans l’expression du seuil viscoplastique maximal (§ 2.4.2 ). Enfin, le paramètre \({v}_{2}\) (V_2) de l’équation (), strictement supérieur à \(1\) , contrôle la cinétique d’écrouissage entre le seuil de pic et le seuil résiduel (Figure.).
La fonction \({s}^{p}\) s’annule pour \({\xi}^{p}={\xi}_{[:ref:`2 <2>\)]}` . Cette évolution est en accord avec le cadre physique proposé par [2]rappelé dans le paragraphe § 1 . La valeur \({s}^{p}=0\) correspond physiquement à une cohésion nulle et donc à la formation d’une ou plusieurs structure(s) de cisaillement au sein d’un échantillon.
Les paramètres matériau introduits par les relations d’écrouissage entre les seuils de pic et intermédiaire sont les suivants:
Paramètre matériau |
Intervalle de définition |
\({q}_{i}^{0}\) |
\({\mathrm{ℝ}}^{+}\) |
\({r}^{q}\) |
\({\mathrm{ℝ}}^{+}\) |
\({\xi}_{[2]}^{0}\) |
\(\left[{\xi}_{[1]}^{0},+\infty \right[\) |
\({r}_{[2]}^{x}\) |
\({\mathrm{ℝ}}^{+}\) |
\({a}_{[2]}\) |
\(\left[\frac{1}{2},1\right]\) |
\({v}_{2}\) |
\(\left]1,+\infty \right[\) |
Tous ces paramètres peuvent être déterminés à partir d’essais de compression triaxiale à différentes températures et pressions de confinement :
Le coefficient \({q}_{i}^{0}\) est obtenu en estimant la pente du seuil résiduel à température ambiante. En effet, en écrivant que le point de coordonnées \(\left\lbrace {p}_{i}^{0},{q}_{i}^{0}\right\rbrace\) appartient à la fois au seuil de pic et au seuil résiduel, nous obtenons la relation suivante:
La pente du seuil résiduel à température ambiante dans le plan des contraintes principales, \({m}_{[3]}^{0}\) s’exprime en fonction de l’angle de frottement résiduel [2]:
Le paramètre \({\mathrm{\phi }}_{[3]}^{0}\) , ou de manière équivalente \({m}_{[3]}^{0}\) , peut être déterminé par identification des résistances résiduelles obtenues pour plusieurs pressions de confinement à température ambiante. En admettant que \({m}_{[1]}^{0}\) et \({\sigma}_{c}\) soient préalablement déterminés en ajustant le seuil de pic à température ambiante, il est possible de remonter jusqu’à \({q}_{i}^{0}\) (équation ). Pour les roches dures, la détermination de l’angle de frottement résiduel peut se révéler difficile car la rupture est souvent brutale, y compris pour des pressions de confinement élevées. Cependant, pour ce type de matériaux, de nombreuses références existent dans la littérature (voir [2]). Pour un granite par exemple, \({\mathrm{\phi }}_{[3]}^{0}\) est souvent pris égal à \(30°-33°\) . En se référant aux tableaux proposés par [22] permettant d’estimer \({\sigma}_{c}=250\mathit{MPa}\) et \({m}_{[1]}^{0}=33\) pour un granite, nous obtenons \({q}_{i}^{0}\approx 4\mathit{GPa}\) .
Le paramètre \({r}^{q}\) s’obtient en estimant l’évolution de la pente du seuil résiduel en fonction de la température.
\({\xi}_{[2]}\) et \({v}_{2}\) sont déterminés à partir des courbes contrainte-déformation axiale obtenues à différentes pressions de confinement à température ambiante.
\({r}_{[2]}^{x}\) est déterminé à partir des courbes contrainte-déformation axiale obtenues à différentes températures et pressions de confinement.
Puisque le paramètre \({a}_{[2]}\) intervient également dans la définition du seuil viscoplastique maximal, ou de manière équivalente du seuil caractéristique, il peut être déterminé soit à partir d’essais de compression triaxiale à température ambiante, soit à partir d’essais de fluage à température ambiante. Ce point particulier sera traité dans le paragraphe § 2.4.2 .
Entre le seuil intermédiaire et le seuil résiduel#
La surface du mécanisme plastique évolue ensuite entre le seuil intermédiaire et le seuil résiduel (numéro \(4\) sur la Figure ). Entre ces deux seuils, les paramètres \({a}^{p}\) , \({s}^{p}\) et \({m}^{p}\) évoluent de la manière suivante:
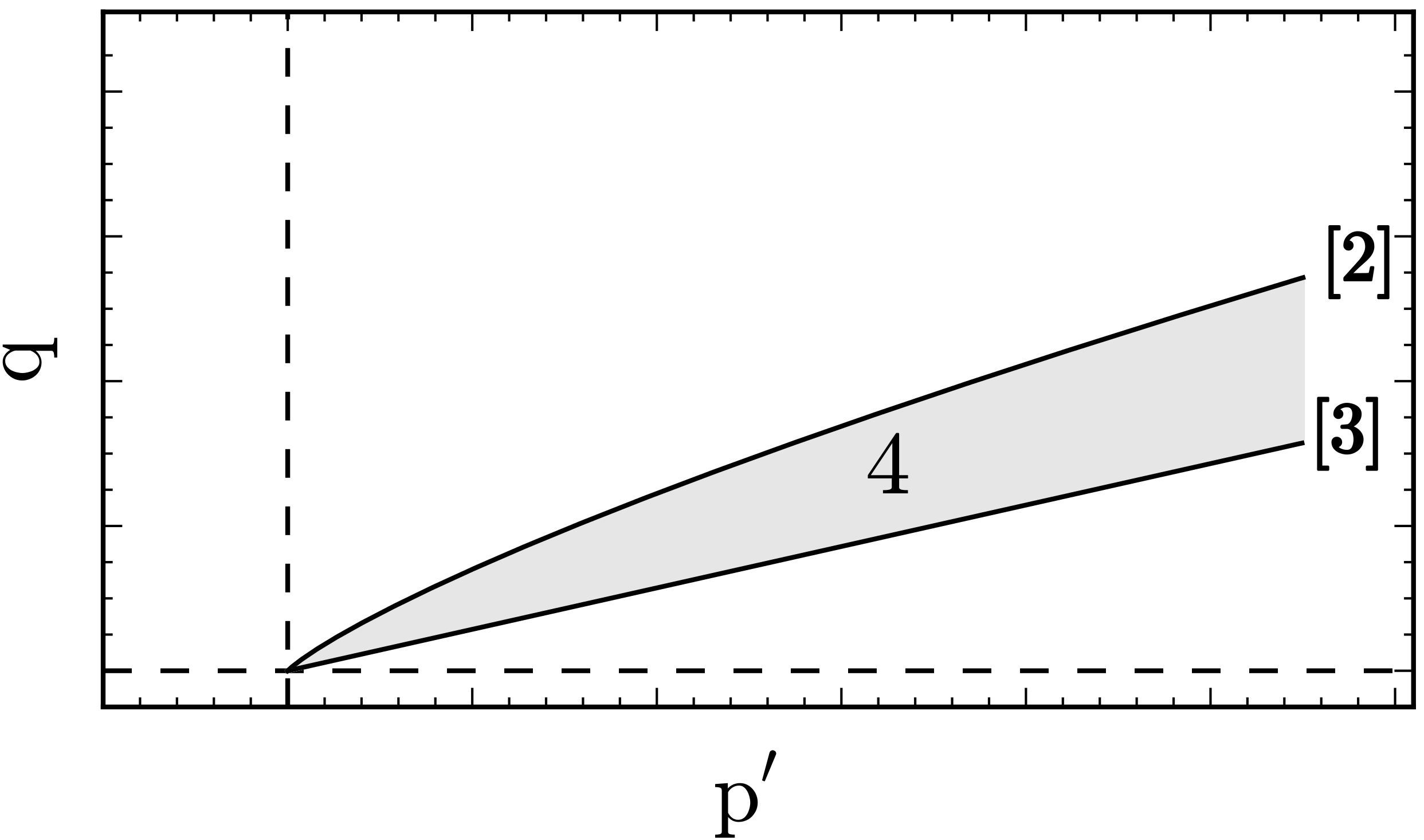
Figure 2.8: Évolution de la surface plastique entre le seuil intermédiaire et le seuil résiduel.
Ces relations n’introduisent aucun paramètre matériau supplémentaire. Le seuil résiduel est atteint de manière asymptotique lorsque \({\xi}^{p}\to \infty ` . :math:`{a}^{p}=1\) sur le seuil résiduel (droite d’état critique, comportement purement frottant) et \({s}^{p}=0\) entre les seuils intermédiaire et résiduel (la cohésion d’un matériau est supposée nulle entre ces deux seuils).
L’expression du paramètre \({m}^{p}\) est obtenue en écrivant que le point de coordonnées \(\left\lbrace {p}_{i},{q}_{i}\right\rbrace\) se trouve à la fois sur le seuil intermédiaire et sur toute surface entre les seuils intermédiaire et résiduel (pour \(\theta =0\) ). La pente du seuil résiduel est obtenue par passage à la limite lorsque :math:`{xi}^{p}to infty ` :
Le paramètre \({m}_{[3]}\) est la pente du seuil résiduel dans le plan des contraintes principales \(\left\lbrace {\sigma}_{min},{\sigma}_{max}\right\rbrace\) (\({\sigma}_{min}\) est la contrainte principale mineure et \({\sigma}_{max}\) est la contrainte principale majeure) et non dans le plan des invariants du tenseur des contraintes \(\left\lbrace p',q\right\rbrace\) . Nous verrons dans le paragraphe § 2.8 qu’il y a une correspondance directe entre ces deux plans. L’expression du seuil résiduel dans le plan \(\left\lbrace p',q\right\rbrace\) s’obtient en écrivant \({F}^{p}=0\) avec \({a}^{p}=1\) , \({s}^{p}=0\) et \({m}^{p}={m}_{[3]}\) :
La pente du seuil résiduel dans le plan \(\left\lbrace p',q\right\rbrace\) au cours d’un essai de compression triaxiale (\(\theta =0\) ) est donc égale à \(\left(\frac{3{m}_{[:ref:`3 <3>\)]}}{3+{m}_{[3]}}right)` . La relation () indique que \({m}_{[:ref:`3 <3>\)]}` dépend naturellement de la température via \({m}_{[1]}\) , \({s}_{[1]}\) et \({q}_{i}\) . Or, la résistance résiduelle des roches tendres et dures diminue avec la température [3]. La Figure présente l’évolution de la pente du seuil résiduel dans le plan \(\left\lbrace p',q\right\rbrace\) en fonction de la température. Cette évolution est cohérente avec ce qui est observé expérimentalement.
Figure 2.9: Évolution de la pente du seuil résiduel dans le plan \(\left\lbrace p',q\right\rbrace\) en fonction de la température.
Mécanisme viscoplastique#
Expression du critère de viscoplasticité#
Nous rappelons que le mécanisme viscoplastique du modèle LETK est basé sur un formalisme de type Perzyna [23]. L’expression du critère de viscoplasticité, que nous noterons \({F}^{\mathit{vp}}\) , est identique, dans sa forme, à celle du critère du mécanisme plastique :
Les quantités \({a}^{\mathit{vp}}\) , \({s}^{\mathit{vp}}\) et \({m}^{\mathit{vp}}\) sont les paramètres d’écrouissage du mécanisme viscoplastique. Pour des raisons similaires à celles évoquées en introduction du paragraphe § 2.3.2 , ces paramètres sont des fonctions de la variable d’écrouissage du mécanisme viscoplastique, que nous noterons \({\xi}^{\mathit{vp}}\) , et de la température, \(T\) . L’expression de \({\xi}^{\mathit{vp}}\) est détaillée dans le paragraphe § 2.6 . Les autres grandeurs intervenant dans l’équation () ont les mêmes expressions et significations que dans le paragraphe § 2.3 . Nous utiliserons également le terme de surface viscoplastique , ou surface du mécanisme viscoplastique , pour désigner la frontière du domaine d’élasticité du mécanisme viscoplastique.
Paramètres d’écrouissage#
Le domaine d’élasticité du mécanisme viscoplastique s’écrouit entre la limite d’élasticité initiale, ou seuil d’endommagement, et le seuil viscoplastique maximal, ou seuil de résistance à long terme (Figure). La vision conceptuelle présentée sur la Figuredoit être légèrement ajustée pour permettre une intégration numérique robuste et relativement simple. En d’autres termes, le seuil viscoplastique maximal, qui coïncide avec le seuil caractéristique, ne peut pas être défini comme l’union de la limite d’élasticité et du seuil intermédiaire pour des raisons de convexité et de continuité.
L’idée est donc de définir le seuil viscoplastique maximal comme une surface qui soit à la fois proche du seuil intermédiaire pour des confinements modérés à élevés et proche de la limite d’élasticité initiale pour des confinements faibles. Pour ce faire, on décide d’imposer deux conditions. La première est que le seuil viscoplastique maximal passe par le point de coordonnées \(\left\lbrace {p}_{i},{q}_{i}\right\rbrace\) (pour \(\theta =0\) ). La seconde est que l’intersection entre le seuil viscoplastique maximal et l’axe \(p'\) (\(p{'}_{[5]}\) sur la Figure ) ne soit par trop éloignée de celle de la limite d’élasticité initiale (

sur la Figure ). Les valeurs prises par les paramètres \({a}^{\mathit{vp}}\) , \({s}^{\mathit{vp}}\) et \({m}^{\mathit{vp}}\) sur le seuil viscoplastique maximal sont indicées par un \([5]\) .
Figure 2.10: Évolution de la surface viscoplastique entre la limite d’élasticité initiale et le seuil viscoplastique maximal.
Il y a donc deux conditions et trois inconnues qui sont les paramètres \({a}_{[5]}\) , \({s}_{[5]}\) et \({m}_{[5]}\) . On décide de fixer \({a}_{[5]}={a}_{[2]}\) . La seconde condition permet d’obtenir une relation linéaire entre \({m}_{[5]}\) et \({s}_{[5]}\) en écrivant que la distance entre \(p{'}_{[0]}\) et \(p{'}_{[5]}\) correspond à un pourcentage de la distance entre \(p{'}_{[0]}\) et \(p{'}_{[1]}\) (\(p{'}_{[1]}\) est l’intersection entre le seuil de pic et l’axe \(p'\) ):
La quantité \({f}_{p}\) (F_P) est un paramètre qui permet de contrôler la distance entre \(p{'}_{[0]}\) et \(p{'}_{[5]}\) (Figure ). Si \({f}_{p}=0\) , \(p{'}_{[0]}\) et \(p{'}_{[5]}\) sont confondus. Si \({f}_{p}=1\) , \(p{'}_{[1]}\) et \(p{'}_{[5]}\) sont confondus. \({f}_{p}\) doit être le plus faible possible puisque le seuil viscoplastique maximal doit être le plus proche possible de la limite d’élasticité initiale à confinements faibles. La plupart du temps, \({f}_{p}\) ne peut cependant pas être nul car dans ce cas là, la limite d’élasticité initiale et le seuil viscoplastique maximal s’interceptent.

n’est pas un paramètre matériau. Il peut être déterminé en procédant de proche en proche en traçant la limite d’élasticité initiale et le seuil viscoplastique maximal et en cherchant la plus petite valeur pour laquelle ces deux seuils ne s’interceptent pas. Une valeur par défaut est fixée à \(0,1\) .
Figure 2.11: Évolution de \(p{'}_{[5]}\) en fonction de \({f}_{p}\) .
La première condition permet d’obtenir l’expression de \({s}_{[5]}\) en utilisant la relation ():
Cette démarche permet de limiter le nombre de paramètres matériau introduits moyennant certaines hypothèses. Entre la limite d’élasticité initiale et le seuil viscoplastique maximal, les paramètres \({a}^{\mathit{vp}}\) , \({s}^{\mathit{vp}}\) et \({m}^{\mathit{vp}}\) prennent la forme suivante :
Le seul paramètre introduit par ces équations est \({\xi}_{[5]}\) . Ce paramètre contrôle l’amplitude des déformations différées lors d’un essai de fluage (Figure ).
Figure 2.12: Influence des paramètres \({A}_{v}^{0}\) (en \(\left[{s}^{-1}\right]\) ), \({n}_{v}\) et \({\xi}_{[5]}^{0}\) sur les courbes obtenues lors d’essais de fluage dans le plan \(\left\lbrace t,{\epsilon}_{\mathit{ax}}^{\mathit{vp}}\right\rbrace\) . \(t\) est le temps et \({\epsilon}_{\mathit{ax}}^{\mathit{vp}}\) est la déformation axiale différée d’un échantillon soumis à des déviateurs de 19 MPa (fluage stable, déviateur appliqué en dessous du seuil viscoplastique maximal) et 26 MPa (fluage instable, déviateur appliqué au-dessus du seuil viscoplastique maximal). Ces courbes sont obtenues à température ambiante.
Une augmentation de température a pour effet d’augmenter l’amplitude des déformations différées observées lors d’essais de fluage. Ce phénomène est reproduit en faisant dépendre \({\xi}_{[5]}\) de la température:
Les quantités \({\xi}_{[5]}^{0}\) (XI_5) et \({r}_{[5]}^{x}\) (R_X5) sont des paramètres matériau strictement positifs. \({\xi}_{[5]}^{0}\) peut être déterminé en ajustant les courbes déformation axiale-temps obtenues lors d’essais de fluage à différents déviateurs et à température ambiante. \({r}_{[5]}^{x}\) est déterminé en ajustant les mêmes courbes obtenues à différentes températures.
Comme évoqué dans le paragraphe § 2.3.2.2 , le paramètre \({a}_{[2]}\) (A_2), qui contrôle la courbure du seuil intermédiaire et celle du seuil viscoplastique maximal, peut être déterminé de deux manières différentes en fonction des données expérimentales disponibles. Nous rappelons également que le seuil viscoplastique maximal est confondu avec le seuil caractéristique qui marque une limite entre des comportements volumiques contractant et dilatant. Si l’évolution des déformations volumiques lors d’un essai de compression triaxiale est une donnée disponible, les courbes déviateur-déformations volumiques, obtenues à différentes pressions de confinement et à température ambiante, peuvent être utilisées pour déterminer \({a}_{[2]}\) . Les niveaux de déviateur correspondant aux transitions contractance/dilatance peuvent être déterminés à partir de ces courbes et reportés dans le plan \(\left\lbrace p',q\right\rbrace\) en supposant que le chemin suivi lors d’un essai de compression triaxiale (drainé ou sec) est tel que \(q=3p\) “. Le seuil caractéristique, ou de manière équivalente le seuil viscoplastique maximal, constitue également une limite entre des comportements à long terme stable et instable. \({a}_{[2]}\) peut donc être déterminé à partir d’essais de fluage à température ambiante en identifiant les niveaux de déviateur correspondant à la transition entre fluages stable et instable pour plusieurs pressions de confinement.
Les paramètres \({s}_{[5]}\) et \({m}_{[5]}\) dépendent naturellement de la température via \({m}_{[1]}\) , \({s}_{[1]}\) , \({q}_{i}\) , \({m}_{[0]}\) et \({s}_{[0]}\) . Le seuil caractéristique dépend donc naturellement de la température. Or, le niveau de déviateur de transition entre des comportements contractant et dilatant a tendance à diminuer avec la température; le niveau de déviateur correspondant à la transition entre des comportements à long terme stable et instable suit également la même évolution. Ces deux phénomènes semblent naturellement reproduits par le cadre proposé par [3] (Figure ).
Figure 2.13: Évolution du seuil caractéristique, ou de manière équivalente du seuil viscoplastique maximal, en fonction de la température.
Anisotropiesplastique et viscoplastique#
L’anisotropie (visco)plastique initiale est prise en compte par la méthode dite du tenseur de fabrique. Cette méthode consiste à rendre les mécanismes plastique et / ou viscoplastique dépendants de l’orientation du chargement via l’introduction d’un tenseur de micro-structure (tenseur de fabrique) dans les expressions de \({F}^{p}\) et / ou \({F}^{\mathit{vp}}\) . Dans le modèle LKR, cette dépendance est introduite via le paramètre \({\sigma}_{c}\) qui représente la résistance à la compression simple du matériau. \({\sigma}_{c}\) prend la forme suivante:
Où \({A}_{ij}\) est un tenseur d’ordre 2 fonction du tenseur de fabrique du matériau, \({l}_{i}\) est un vecteur décrivant l’orientation du chargement dans le repère local du matériau, \({\widehat{\sigma}}_{c}\) et \({b}_{i}\) sont des paramètres matériaux. L’expression est généralement simplifiée à l’ordre 2 (suffisant pour reproduire le comportement observé en laboratoire) et pour des matériaux isotropes transverses (\({A}_{ij}\) devient un scalaire \({A}_{22}={A}_{33}=-0.5{A}_{11}\) , qui est un paramètre matériau). Les trois paramètres matériau introduits par l’expression sont donc \({\widehat{\sigma}}_{c}\) (SIGMA_C), \({b}_{1}\) (B_SIGC) et \({A}_{11}\) (A_SIGC). Une routine est spécifiquement dédiée au calcul de \({\sigma}_{c}\) . Les composantes \({l}_{i}\) ont pour expression:
Où \({\sigma}^{l}\) est le tenseur des contraintes dans le repère local:
Avec \({P}_{33}^{\mathit{gl}}\) matrice de passage du repère global vers le repère local et \({\sigma}^{g}\) tenseur des contraintes exprimé dans le repère global.
Couplage entre les deux mécanismes#
Les mécanismes plastique et viscoplastique sont couplés à travers leurs variables internes d’écrouissage. Ce couplage permet, entre autre, de reproduire la dépendance de la résistance maximale des géomatériaux à la vitesse de sollicitation, et donc au temps. Le couplage entre les deux mécanismes s’enclenche dès que l’état de contrainte se trouve au-dessus du seuil caractéristique [2]. L’écrouissage de la surface viscoplastique influence celui de la surface plastique. Tant que l’état de contrainte est en dessous du seuil caractéristique, l’incrément de la variable d’écrouissage du mécanisme plastique, \({\dot{\xi}}^{p}\) , coïncide avec l’incrément de déformation plastique équivalente, ou distorsion plastique, \({\dot{\gamma}}^{p}\) :
Lorsque l’état de contrainte se trouve au-dessus du seuil caractéristique, \({\dot{\xi}}^{p}\) est la somme de l’incrément de distorsion plastique \({\dot{\gamma}}^{p}\) et de l’incrément de distorsion viscoplastique, \({\dot{\gamma}}^{\mathit{vp}}\) :
L’incrément de la variable d’écrouissage du mécanisme viscoplastique est égal à l’incrément de distorsion viscoplastique, peu importe l’état de contrainte:
Lois d’écoulement#
Il est communément admis que la direction des écoulements (visco)plastiques dérive d’une fonction \({g}^{(v)p}\) appelée potentiel (visco)plastique. Si ce potentiel coïncide avec la fonction \({F}^{(v)p}\) , la loi d’écoulement est dite normale ou associée , dans un sens où elle est associée au critère de (visco)plasticité \({F}^{(v)p}\) . Une loi d’écoulement dérivant d’un potentiel distinct de \({F}^{(v)p}\) (plus précisément tel que \(\frac{\partial {g}^{(v)p}}{\partial \sigma }\) n’est pas proportionnel à \(\frac{\partial {F}^{(v)p}}{\partial \sigma }\) est dite non associée . Les matériaux obéissant à la loi de normalité sont généralement qualifiés de standards généralisés .
La notion de matériau standard est «pratique » puisque elle permet de décrire le comportement plastique d’un matériau à partir d’une seule fonction [24]. Néanmoins, les hypothèses qui sont à la base de la théorie de la plasticité associée ne sont pas représentatives du comportement réel des roches, des sols et des bétons [25].
La notion de (visco)plasticité non associée nécessite la définition d’une grandeur appelée angle de dilatance , que nous noterons \(\psi ` , qui permet de contrôler les variations de volume (visco)plastique [:ref:`24 <24>\)].
Le cadre défini par [2], et repris par [3], est inspiré des travaux réalisés par [26] et [27]. Ce cadre permet de définir de manière explicite l’évolution de l’angle de dilatance, donc l’évolution des variations de volume (visco)plastique, sans passer par la détermination d’un potentiel (visco)plastique. L’hypothèse soutenue par [27] stipule que (on note :math:`Sigma ` l’espace des contraintes):
Le tenseur \(n\) d’ordre deux est déterminé par une condition cinématique liant les déformations volumiques (visco)plastiques et les déformations (visco)plastiques de cisaillement. Cette condition cinématique permet de décrire la transition entre des comportements volumiques contractant et dilatant. Inspirés des travaux réalisés par [28], nous proposons la relation linéaire suivante:
Le coefficient \(\beta ` est un scalaire qui dépend de l'angle de dilatance (équation ). Les tenseurs :math:`n\) et \({\dot{\epsilon}}^{(v)p}\) peuvent se décomposer en une partie sphérique, \({n}_{1}\delta ` et :math:\)left(frac{{dot{epsilon}}_{V}^{(v)p}}{3}right)delta ` (on rappelle que \(\delta ` est le tenseur identité d'ordre deux), et en une partie déviatorique, :math:`{n}_{2}s\) et \({\dot{e}}^{(v)p}\) . En combinant les équations () et (), on obtient:
En supposant de plus que \(n\) est de norme unitaire, nous obtenons finalement:
Nous rappelons que l’expression de \({\dot{\epsilon}}^{(v)p}\) doit respecter la condition (). Pour ce faire, [28] propose de prendre la projection de \({\dot{\epsilon}}^{(v)p}\) sur l’hypersurface de déformation de normale \(n\) , soit:
Le multiplicateur (visco-)plastique, \({\dot{\lambda}}^{(v)p}\) , ou plus simplement \(\dot{\lambda}\) , est obtenu en appliquant les conditions complémentaires de Kuhn-Tucker et la condition de cohérence:
Avec:
Et:
On a noté \({g}_{\mathit{II}}^{p}\) la norme du déviateur de \({G}^{p}\) . Nous remarquons que les variations de température \(\dot{T}\) influencent directement l’amplitude des déformations plastiques. La relation () est écrite dans le cas où il y a couplage entre les deux mécanismes (état de contrainte au-dessus du seuil caractéristique). S’il n’y a pas couplage, le terme \({\dot{\gamma}}^{\mathit{vp}}\frac{\partial {F}^{p}}{\partial {\xi}^{p}}\) au numérateur de l’équation () est nul.
Remarque: dans les dérivées de l’expression , \({\sigma}_{c}\) est supposée constante, égale à \({\widehat{\sigma}}_{c}\) .
L’incrément de déformation viscoplastique est défini par la notion de surcontrainte introduite par [23]:
Où \(⟨\mathrm{\phi }⟩\) est une fonction positive de \({F}^{\mathit{vp}}\) :
Le paramètre \({A}_{v}\) est un coefficient inversement proportionnel à la viscosité du matériau. Il est communément admis que ce paramètre évolue en fonction de la température selon une loi de type Arrhenius [18] ; la température a un effet catalyseur sur la cinétique du comportement à long terme (notion de phénomène thermoactivé). \({A}_{v}^{0}\) (paramètre A dans DEFI_MATERIAU) est la valeur prise par \({A}_{v}\) à température ambiante, \(Z\) (paramètre Z dans DEFI_MATERIAU) est l’énergie d’activation, \(R=8,31441\mathit{kJ}/\mathit{mol}/K\) est la constante universelle des gaz parfaits et \({n}_{v}\) (paramètre N dans DEFI_MATERIAU) est un paramètre strictement positif qui contrôle également la cinétique du comportement à long terme (Figure ). On pourra se référer à cette Figure pour constater les effets qu’ont les paramètres \({A}_{v}^{0}\) et \({n}_{v}\) sur les courbes typiquement obtenues lors d’essais de fluage.
Lois de dilatance#
Inspirés des travaux réalisés par [29], [2] proposa la relation suivante pour le paramètre :math:`beta ` :
Dans le cadre considéré par [2] , l’angle de dilatance évolue en fonction de l’état de contrainte et des variables internes d’écrouissage. Deux approches sont proposées. La première approche permet de décrire l’évolution de l’angle de dilatance pour la partie pré-pic du mécanisme plastique et pour le mécanisme viscoplastique. Cette approche est basée sur la notion d’état caractéristique. Tant que l’état de contrainte est en dessous du seuil caractéristique, l’angle de dilatance est négatif et le comportement volumique (visco)plastique est contractant. Lorsque l’état de contrainte se trouve au-dessus du seuil caractéristique, l’angle de dilatance est positif et le comportement volumique (visco)plastique est dilatant. La seconde approche permet de décrire l’évolution de l’angle de dilatance pour le régime post-pic du mécanisme plastique.
Dans la première approche, nous devons être en mesure de pouvoir déterminer la position de l’état de contrainte par rapport au seuil caractéristique. À cause de la non linéarité des fonctions \({F}^{p}\) (équation ) et \({F}^{\mathit{vp}}\) (équation ), le niveau de déviateur \(q\) sur le seuil caractéristique ne peut pas être directement évalué à partir de la contrainte moyenne effective \(p'\) . Il est nécessaire d’effectuer un changement de repère. Ce changement de repère permet d’exprimer les quantités \(q\) et \(p'\) en fonction des contraintes principales majeure \(\sigma {'}_{max}\) et mineure \(\sigma {'}_{min}\) . Pour obtenir les relations de changement de repère, il suffit d’écrire le critère de (visco)plasticité dans ces deux plans:
Par analogie entre les relations de l’équation (), nous obtenons:
Pour la première approche, [2] propose la relation suivante pour :math:`sinpsi ` :
Les paramètres \({\rho}_{1}\) (RHO_1) et \({\rho}_{2}\) (RHO_2) sont des constantes matériau strictement positives et \(\sigma {'}_{\mathit{char}}\) est la valeur de \(\sigma {'}_{max}\) sur le seuil caractéristique:
À partir de la relation (), nous voyons que l’angle de dilatance est négatif lorsque \(\sigma {'}_{max}\le \sigma {'}_{\mathit{char}}\) et positif dans le cas contraire. La Figureprésente l’évolution de l’angle de dilatance et des déformations volumiques au cours d’essais de compression triaxiale pour différentes valeurs du paramètre \({\rho}_{2}\) .
Figure 2.14: Influence des paramètres matériau \({\rho}_{2}\) et \({\rho}_{4}\) sur l’évolution de l’angle de dilatance et sur les courbes déformation volumique-déformation axiale typiquement obtenues lors d’essais de compression triaxiale. Les deux lignes en pointillés représentent les valeurs prises par \({\xi}^{p}\) et \({\epsilon}_{\mathit{ax}}\) sur les seuils de pic et intermédiaire. Ces courbes sont obtenues en négligeant le couplage entre les deux mécanismes.
Le paramètre \({\rho}_{2}\) contrôle la pente des courbes déformation volumique-déformation axiale au niveau du seuil de pic. Une valeur élevée du paramètre \({\rho}_{2}\) retarde la transition vers un comportement dilatant absolu . Les paramètres \({\rho}_{1}\) et \({\rho}_{2}\) interviennent également dans l’expression du sinus de l’angle de dilatance pour le régime post-pic du mécanisme plastique. La loi d’évolution proposée pour le régime post-pic est inspirée des travaux de [30]:
La partie de gauche de la relation () permet d’assurer la continuité d’évolution de l’angle de dilatance entre les régimes pré-pic et post-pic du mécanisme plastique (continuité de la direction des incréments de déformation plastique). La partie de droite permet de décrire l’évolution de l’angle de dilatance en régime post-pic. Le coefficient \({\rho}_{4}\) (RHO_4) est un paramètre matériau strictement positif qui contrôle la valeur maximale de l’angle de dilatance atteinte lors d’un essai de compression triaxiale (Figure ). Cette valeur maximale est directement reliée à la pente des courbes déformation volumique-déformation axiale (Figure ). Le paramètre \({\rho}_{1}\) influence l’évolution de la valeur maximale de \(\psi ` en fonction du confinement (Figure ). Les quantités :math:\)stackrel{~}{sigma}` , \({\stackrel{~}{\sigma}}_{[1]}\) , \(\alpha ` et :math:`{\alpha}_{\mathit{res}}\) s’expriment en fonction de l’état de contrainte et des paramètres d’écrouissage du mécanisme plastique. Le coefficient \({\alpha}_{\mathit{res}}\) s’exprime en fonction de la pente du seuil résiduel:
La relation () est une extension aux matériaux cohérents de l’expression proposée par [30] pour les sols pulvérulents. [30] exprime la quantité \(\alpha ` en fonction des contraintes principales mineure et majeure. Pour tenir compte de l'effet inhibiteur de la cohésion sur le développement de la dilatance, [:ref:`2 <2>\)] proposa l’expression suivante:
Où le coefficient \(\stackrel{~}{\sigma}\) est un terme de cohésion défini par:
Le paramètre \({\stackrel{~}{\sigma}}_{[1]}\) est la valeur prise par \(\stackrel{~}{\sigma}\) sur le seuil de pic. Puisque le paramètre \({s}^{p}\) décroît progressivement entre le seuil de pic et le seuil intermédiaire et s’annule sur le seuil intermédiaire (), \(\stackrel{~}{\sigma}\) suit la même évolution. Au-delà du seuil intermédiaire, la quantité \(\stackrel{~}{\sigma}\) est donc nulle. Nous retrouvons l’expression proposée par [30] pour un matériau granulaire dépourvu de cohésion. Lorsque \({\xi}^{p}\to \infty ` , :math:\)alpha ` se rapproche progressivement de \({\alpha}_{\mathit{res}}\) et \(\sin\psi ` se rapproche de :math:`0\) . La déformation d’un échantillon de roche ou de sol se fait, dans ce cas là, de manière isochore (Figure ).
Les paramètres matériau introduits par les lois d’écoulement et de dilatance sont les suivants:
Paramètre matériau |
Intervalle de définition |
DEFI_MATERIAU |
\({A}_{v}^{0}\) |
\({\mathrm{ℝ}}^{+}\) |
A |
\(Z\) |
\({\mathrm{ℝ}}^{+}\) |
Z |
\({n}_{v}\) |
\({\mathrm{ℝ}}^{+}\) |
N |
\({\rho}_{1}\) |
\({\mathrm{ℝ}}^{+}\) tel que \(-1\le \sin\psi \le 1\) |
RHO_1 |
\({\rho}_{2}\) |
\({\mathrm{ℝ}}^{+}\) tel que \(-1\le \sin\psi \le 1\) |
RHO_2 |
\({\rho}_{4}\) |
\({\mathrm{ℝ}}^{+}\) tel que \(-1\le \sin\psi \le 1\) |
RHO_4 |
Tous ces paramètres peuvent être déterminés à partir d’essais de compression triaxiale ou d’essais de fluage :
Les paramètres \({A}_{v}^{0}\) et \({n}_{v}\) peuvent être déterminés à partir d’essais de fluage à température ambiante;
Le paramètre \(Z\) peut être déterminé à partir d’essais de fluage à différentes températures;
Les paramètres \({\rho}_{1}\) , \({\rho}_{2}\) et \({\rho}_{4}\) peuvent être déterminés en ajustant les courbes déformation volumique-déformation axiale issues d’essais de compression triaxiale à température ambiante. Sur les Figures et , nous remarquons que le maximum atteint par \(\psi ` se trouve proche du seuil intermédiaire, ce qui est en accord avec le cadre fixé par [:ref:`2 <2>\)]. Ce maximum est en réalité atteint lorsque l’état de contrainte se trouve entre le seuil caractéristique et le seuil intermédiaire. La partie de gauche de l’équation () s’annule sur le seuil caractéristique tandis que la partie de droite de cette même équation est maximale sur le seuil intermédiaire. Plus le seuil caractéristique et le seuil intermédiaire sont proches, c’est-à-dire plus le paramètre \({f}_{p}\) (équation ) est faible, plus ce maximum se rapproche du seuil intermédiaire. La proximité entre ces deux seuils peut d’ailleurs être utilisée pour évaluer les paramètres \({\rho}_{1}\) , \({\rho}_{2}\) et \({\rho}_{4}\) si les données expérimentales sont peu abondantes ou inexistantes. En supposant que les seuils caractéristique et intermédiaire sont confondus, il est possible d’approcher la valeur de \(\psi ` sur le seuil intermédiaire à température ambiante :math:`{\psi}_{[:ref:`2 <2>\)]}^{0}` , pour une pression de confinement donnée (non nulle) \(\mathit{CP}\) :
Le paramètre \({m}_{[3]}^{0}\) est donné par l’équation ()écrite à température ambiante. Moyennant une hypothèse sur la valeur de \({\psi}_{[2]}^{0}\) et sur \({\rho}_{1}\) ou \({\rho}_{4}\) , il est possible d’évaluer le paramètre manquant. En faisant les mêmes hypothèses, l’angle de dilatance sur le seuil de pic à température ambiante, \({\psi}_{[1]}^{0}\) , pour une pression de confinement donnée, s’exprime également de manière analytique:
Les paramètres \({m}_{[5]}^{0}\) et \({s}_{[5]}^{0}\) sont déterminés à partir des relations () et () écrites à température ambiante. Cette méthode analytique a notamment permis de tracer certaines courbes sur les Figures et . Pour les courbes de droite sur la Figure et pour les courbe à \(5\mathit{MPa}\) de confinement sur la Figure . Dans [3], on afixé \({\psi}_{[1]}^{0}=2°C\) et \({\psi}_{[2]}^{0}=25°C\) .
Figure 2.15: Influence du paramètre \({\rho}_{1}\) sur l’évolution de l’angle de dilatance au cours d’essais de compression triaxial réalisés à différentes pressions de confinement, \({\sigma}_{3}\) .
Intégration numérique#
Dans ce paragraphe, nous revenons brièvement sur l’intégration numérique du modèle thermomécanique proposé. Le modèle a été intégré selon deux schémas : un schéma explicite et un schéma implicite. Nous donnons uniquement les grandes lignes de ces deux schémas sans nécessairement détailler toutes les quantités mises en jeu. Dans ce qui suit, nous utiliserons exceptionnellement la notation :math:`sigma ` pour désigner le tenseur des contraintes effectives. Ceci permet de ne pas alourdir les notations. Nous ne détaillerons pas l’expression des dérivées qui interviennent dans l’ensemble des équations.
Schéma d’intégration explicite#
Le schéma d’intégration explicite (ALGO_INTE=”SPECIFIQUE”) consiste en une phase classique de prédiction élastique suivie d’une phase de correction (visco)plastique si l’un des deux, ou les deux, mécanisme(s) est/sont activé(s) pendant ce tir élastique. Les variables d’entrée de l’algorithme de résolution sont :
\(t\) : temps à l’instant «+»;
\({t}^{-}\) : temps à l’instant «-»;
\(T\) : température à l’instant «+»;
\({T}^{-}\) : température à l’instant «-»;
\({T}_{0}\) : température de référence;
\({\sigma}^{-}\) : tenseur des contraintes effectives à l’instant «-»;
\({\xi}^{\mathit{vp}-}\) : variable d’écrouissage du mécanisme viscoplastique à l’instant «-»;
\({\xi}^{p-}\) : variable d’écrouissage du mécanisme plastique à l’instant «-»;
:math:`Delta epsilon ` : incrément de déformation totale.
Les variables de sortie sont :
:math:`sigma ` : tenseur des contraintes effectives à l’instant «+»;
\({\xi}^{\mathit{vp}}\) : variable d’écrouissage du mécanisme viscoplastique à l’instant «+»;
\({\xi}^{p}\) : variable d’écrouissage du mécanisme plastique à l’instant «+»;
\(\frac{\partial {\sigma}_{ij}}{\partial \Delta {\epsilon}_{kl}}\) : opérateur tangent.
À partir des données d’entrée, nous procédons de la manière suivante :
Prédiction élastique : \({\sigma}^{e}={\sigma}^{-}+D:\left(\Delta \epsilon -\alpha \Delta T\right)\)
Mécanisme viscoplastique actif?
Calcul de \({F}^{\mathit{vp}}\left({\sigma}^{e},{\xi}^{\mathit{vp}-},T\right)\)
Si \({F}^{\mathit{vp}}\left({\sigma}^{e},{\xi}^{\mathit{vp}-},T\right)<0\) , on est élastique:
\(\Delta {\epsilon}^{\mathit{vp}}=0\)
\(\Delta {\xi}^{\mathit{vp}}=\Delta {\gamma}^{\mathit{vp}}=0\)
\({\xi}^{\mathit{vp}}={\xi}^{\mathit{vp}-}\)
\({\gamma}^{\mathit{vp}}={\gamma}^{\mathit{vp}-}\)
Si \({F}^{\mathit{vp}}\left({\sigma}^{e},{\xi}^{\mathit{vp}-},T\right)\ge 0\) , on est viscoplastique:
\(\Delta {\epsilon}^{\mathit{vp}}={A}_{v}^{T}{\left(\frac{⟨{F}^{\mathit{vp}}\left({\sigma}^{e},{\xi}^{\mathit{vp}},T\right)⟩}{{P}_{a}}\right)}^{{n}_{v}}{G}^{\mathit{vp}-}\Delta t\)
\(\Delta {\gamma}^{\mathit{vp}}=\sqrt{\frac{2}{3}\Delta {e}^{\mathit{vp}}:\Delta {e}^{\mathit{vp}}}\) avec :math:`Delta {e}^{mathit{vp}}=Delta {epsilon}^{mathit{vp}}-mathit{Tr}frac{left(Delta {epsilon}^{mathit{vp}}right)}{3}delta `
\(\Delta {\xi}^{\mathit{vp}}=min(\Delta {\gamma}^{\mathit{vp}},{\xi}_{[5]}-{\xi}^{\mathit{vp}-})\)
\({\xi}^{\mathit{vp}}={\xi}^{\mathit{vp}-}+\Delta {\xi}^{\mathit{vp}}\)
\({\gamma}^{\mathit{vp}}={\gamma}^{\mathit{vp}-}+\Delta {\gamma}^{\mathit{vp}}\)
\({\epsilon}^{\mathit{vp}}={\epsilon}^{\mathit{vp}-}+\Delta {\epsilon}^{\mathit{vp}}\)
Mécanisme plastique actif?
Position de l’état de contrainte par rapport au seuil caractéristique :
Si \({F}^{\mathit{vp}}\left({\sigma}^{e},{\xi}_{[5]},T\right)\ge 0\) ,il y a couplage entre les deux mécanismes
Sinon, il n’y pas de couplage entre les deux mécanismes
Calcul de \({F}^{p}\left({\sigma}^{e},{\xi}^{p-},T\right)\)
Si \({F}^{p}\left({\sigma}^{e},{\xi}^{p-},T\right)<0\) , on est élastique:
\(\Delta {\epsilon}^{p}=0\)
\(\Delta {\gamma}^{p}=0\)
\({\gamma}^{p}={\gamma}^{p-}\)
\({\xi}^{p}={\xi}^{p-}+\Delta {\xi}^{p}\) avec:
\(\Delta {\xi}^{p}=0\) s’il n’y a pas couplage entre les deux mécanismes
\(\Delta {\xi}^{p}=\Delta {\gamma}^{\mathit{vp}}\) s’il y a couplage entre les deux mécanismes
Mise à jour des contraintes :
\(\sigma ={\sigma}^{-}+D\left(\Delta \epsilon -\Delta {\epsilon}^{\mathit{vp}}-\alpha \Delta T\right)\)
Si \({F}^{p}\left({\sigma}^{e},{\xi}^{p-},T\right)\ge 0\) , on est plastique:
Calcul de :math:`Delta lambda ` (équation )
\(\Delta \epsilon =\Delta \lambda {G}^{p-}\)
\(\Delta {\gamma}^{p}=\sqrt{\frac{2}{3}\Delta {e}^{p}:\Delta {e}^{p}}\) avec :math:`Delta {e}^{p}=Delta {epsilon}^{p}-mathit{Tr}frac{left(Delta {epsilon}^{p}right)}{3}delta `
\(\Delta {\xi}^{p}=\Delta {\gamma}^{p}\) s’il n’y a pas couplage entre les deux mécanismes
\(\Delta {\xi}^{p}=\Delta {\gamma}^{p}+\Delta {\gamma}^{\mathit{vp}}\) s’il y a couplage entre les deux mécanismes
\({\xi}^{p}={\xi}^{p-}+\Delta {\xi}^{p}\)
Mise à jour des contraintes :
\(\sigma ={\sigma}^{-}+D\left(\Delta \epsilon -\Delta {\epsilon}^{\mathit{vp}}-\Delta {\epsilon}^{p}-\alpha \Delta T\right)\)
Calcul de l’opérateur tangent \(\frac{\partial {\sigma}_{ij}}{\partial \Delta {\epsilon}_{kl}}\) (voir § 3.1.2 )
Détermination de l’incrément du multiplicateur plastique#
L’incrément du multiplicateur plastique :math:`Delta lambda ` est déterminé en appliquant la condition de Kuhn-Tucker, c’est-à-dire appliquer la condition suivante:
Soit sous forme incrémentale:
Nous choisissons de faire une résolution explicite par développement d’Euler:
Nous notons:
Deux cas sont à distinguer.
S’il y a couplage entre les mécanismes plastique et viscoplastique (état de contrainte au-dessus du seuil caractéristique). On a \(\Delta {\xi}^{p}=\Delta {\gamma}^{p}+\Delta {\gamma}^{\mathit{vp}}\) , et donc:
Et:
D’où l’expression du multiplicateur plastique:
Avec:
La quantité \({A}_{v}^{T}\) représente la quantité \({A}_{v}\) calculée à la température \(T\) (instant «+»).
S’il n’y a pas de couplage entre les deux mécanismes (état de contrainte en dessous du seuil caractéristique), on a donc \(\Delta {\xi}^{p}=\Delta {\gamma}^{p}\) , on a l’expression suivante du multiplicateur plastique:
Opérateur tangent#
L’expression du tenseur des contraintes à l’instant «+» est:
L’opérateur tangent est défini par:
Les deux mêmes cas sont à distinguer. Quand il n’y a pas de couplage entre les deux mécanismes, on a donc \(\Delta {\xi}^{p}=\Delta {\gamma}^{p}\) . Le premier terme vaut, à partir de ():
Et le second terme:
La matrice tangente résultante vaut donc:
Quand il y a couplage entre les deux mécanismes, on a donc \(\Delta {\xi}^{p}=\Delta {\gamma}^{p}+\Delta {\gamma}^{\mathit{vp}}\) . Le premier terme vaut, à partir de ():
Avec les deux termes suivants:
Et:
Ce schéma explicite a été supprimé de la version actuelle du modèle car peu utilisé et peu robuste face à l’intégration implicite qui suit.
Schéma d’intégration implicite#
Le schéma est sélectionné lorsque ALGO_INTE = “NEWTON”.
Phase de prédiction élastique#
Cette étape est identique à celle du paragraphe § 3.1 .
Phase de correction : équations non linéaires à résoudre#
Cette étape consiste à résoudre le système d’équations non linéaires établi sur la base des mécanismes viscoplastique et/ou plastique. Les inconnues du système d’équations non linéaires sont les contraintes effectives à l’instant «+», \(\sigma ` , le multiplicateur plastique :math:\)Delta lambda ` , la variable d’écrouissage du mécanisme plastique à l’instant «+», \({\xi}^{p}\) , et la variable d’écrouissage du mécanisme viscoplastique à l’instant «+», \({\xi}^{\mathit{vp}}\) . Le vecteur des inconnues est donc, au maximum, de taille neuf (3D). Les équations non linéaires à résoudre sont:
L’équation d’état incrémentale:
La condition de Kuhn-Tucker:
L’évolution incrémentale de la variable d’écrouissage du mécanisme plastique:
L’évolution incrémentale de la variable d’écrouissage du mécanisme viscoplastique:
Ces inconnues forment un système carré, \(R(\Delta Y)\) où \(\Delta Y=(\Delta \sigma ,\Delta \lambda ,\Delta {\xi}^{p},\Delta {\xi}^{\mathit{vp}})\) . À l’itération \(k\) de la boucle de correction locale de Newton, l’équation matricielle suivante, d’inconnue \(\delta (\Delta {Y}^{k+1})\) est résolue:
La matrice jacobienne \(\frac{\mathit{dR}(\Delta {Y}^{k})}{d(\Delta {Y}^{k})}\) , non symétrique, se construit de la manière suivante:
Les termes dérivés associés à \({R}_{1}\) , correspondant à la première ligne de \(\frac{\mathit{dR}(\Delta {Y}^{k})}{d(\Delta {Y}^{k})}\) sont:
Les termes dérivés associés à \({R}_{2}\) , correspondant à la deuxième ligne de \(\frac{\mathit{dR}(\Delta {Y}^{k})}{d(\Delta {Y}^{k})}\) sont, en élasticité ( :math:`{R}_{2}equiv Delta lambda ` ):
Et en plasticité ( \({R}_{2}\equiv {F}^{p}\) ):
Les termes dérivés associés à \({R}_{3}\) , correspondant à la troisième ligne de \(\frac{\mathit{dR}(\Delta {Y}^{k})}{d(\Delta {Y}^{k})}\) sont:
Les termes dérivés associés à \({R}_{4}\) , correspondant à la quatrièmeligne de \(\frac{\mathit{dR}(\Delta {Y}^{k})}{d(\Delta {Y}^{k})}\) sont:
On ne détaillera pas la totalité des termes dans ce document.
Description des paramètres du modèle#
Paramètre matériau |
DEFI_MATERIAU |
Valeur par défaut |
\({P}_{a}\) |
PA |
|
\({\sigma}_{c}\) |
SIGMA_C |
|
:math:`beta ` |
BETA |
1,5 |
:math:`gamma ` |
GAMMA |
0 |
\({v}_{1}\) |
V_1 |
|
\({v}_{2}\) |
V_2 |
|
\({a}_{[2]}\) |
A_2 |
|
\({m}_{[0]}^{0}\) |
M_0 |
|
\({m}_{[1]}^{0}\) |
M_1 |
|
\({q}_{i}^{0}\) |
Q_I |
|
\({\xi}_{[1]}^{0}\) |
XI_1 |
|
\({\xi}_{[2]}^{0}\) |
XI_2 |
|
\({\xi}_{[5]}^{0}\) |
XI_5 |
|
\({f}_{p}\) |
F_P |
0,1 |
\({A}_{v}^{0}\) |
A |
|
\({n}_{v}\) |
N |
|
\({\rho}_{1}\) |
RHO_1 |
|
\({\rho}_{2}\) |
RHO_2 |
|
\({\rho}_{4}\) |
RHO_4 |
|
\({r}^{q}\) |
R_Q |
0 |
\({r}^{m}\) |
R_M |
0 |
\({r}^{s}\) |
R_S |
0 |
\({r}_{[1]}^{x}\) |
R_X1 |
0 |
\({r}_{[2]}^{x}\) |
R_X2 |
0 |
\({r}_{[5]}^{x}\) |
R_X5 |
0 |
\(Z\) |
Z |
0 |
COUPLAGE_P_VP |
1 |
|
\({b}_{1}\) |
B_SIGC |
0 |
\({A}_{11}\) |
A_SIGC |
0 |
Remarques:
Les paramètres du modèle à renseigner sous le mot-clé facteur LKR de la commande DEFI_MATERIAU.
Le paramètre COUPLAGE_P_VP permet d’activer (1) ou non (0) le couplage entre les mécanismes plastique et viscoplastique.
Les paramètres ayant une valeur par défaut sont facultatifs.
Les paramètres élastiques sont à renseigner sous le mot clé ELAS_ORTH ou ELAS_ISTR. L’anisotropie (visco)plastique est de type isotrope transverse.
Variables internes#
Les variables internes du modèle,définies dans c ode_aster sont:
Index |
Nom |
Description |
|
V1 |
XIP |
variable d’écrouissage du mécanisme plastique |
\({\xi}^{p}\) |
V2 |
GAMMAP |
déformation plastique équivalente |
\({\gamma}^{p}\) |
V3 |
XIVP |
variable d’écrouissage du mécanisme viscoplastique |
\({\xi}^{\mathit{vp}}\) |
V4 |
GAMMAVP |
déformation viscoplastiqueéquivalente |
\({\gamma}^{\mathit{vp}}\) |
V5 |
INDICDIL |
indicateur de dilatance 0 si contractant 1 si dilatant |
|
V6 |
INDIVISC |
indicateur de viscoplasticité 1si viscoplasticité 0 sinon |
|
V7 |
INDIPLAS |
indicateur de plasticité 1 si plasticité 0 sinon |