r4.05.08 Méthode de prise en compte de l’interaction Plancher-Matériel#
Résumé:
Dans les études sismiques, on est souvent amené à réaliser des spectres de plancher pour des bâtiments où les équipements sont modélisés par des masses ajoutées au plancher. Ces masses supplémentaires impactent les spectres de plancher. La méthode proposée ici permet de modifier les spectres de plancher en prenant en compte l’interaction des masses et du plancher.
Développement de la méthode#
Principes de la méthode#
La méthode proposée repose sur l’hypothèse simple que la réponse du plancher sans Interaction Plancher‑Matériel (IPM) peut être assimilée à la réponse d’un oscillateur 1D de fréquence \({f}_{1}\) , de masse \({m}_{1}+{m}_{2}\) et d’amortissement \({\xi}_{1}\) (voir Figure 2), où nous avons défini \({m}_{1}\) comme étant la masse du plancher et \({m}_{2}\) la masse de l’équipement.
C’est le mode de flexion des panneaux de plancher qui est pris en compte par la modélisation unidimensionnelle du plancher. Nous considérons en outre que la masse modale mobilisée par le mode de flexion est la masse totale du plancher, ce qui est une hypothèse conservative. La réponse du plancher sans IPM revient à considérer que l’équipement de masse \({m}_{2}\) est rigidement lié au plancher.
L’équipement est quant à lui caractérisé par un ensemble d’oscillateurs 1D de fréquences et de masses variables. Nous supposons en effet que les équipements lourds disposés sur le plancher possèdent plusieurs fréquences propres dans la direction verticale. Les caractéristiques modales de l’équipement (fréquences et masses participatives) sont à déterminer en amont du calcul par l’utilisateur. Ces données peuvent être trouvées dans les notes de qualification ou les notes de dimensionnement. Un calcul par éléments finis peut également fournir ce type d’information. Chacune des caractéristiques mécaniques des oscillateurs représentant l’équipement porteront l’indice \(i\) dans la suite de ce document.
A partir de la masse \({m}_{2}\) de l’équipement et de la masse \({m}_{1}\) du plancher, on définit le ratio de masse \(\lambda ={m}_{2}/{m}_{1}\) .
La méthode utilisée pour obtenir les spectres de plancher corrigés repose sur le principe suivant:
L’accélérogramme issu des calculs de réponse du bâtiment et des planchers caractérise le mouvement de la masse \({m}_{1}+{m}_{2}\) dans le modèle A (voir Figure 2);
L’accélérogramme corrigé prenant en compte l’IPM est calculé en considérant que l’équipement est caractérisé par une série d’oscillateurs simples;
A partir de l’accélérogramme corrigé, des spectres de plancher corrigés sont calculés pour différentes valeurs du pourcentage d’amortissement critique.
Pour le calcul de l’accélérogramme corrigé, nous employons une méthode fréquentielle fondée sur l’utilisation de fonctions de transfert. Cette méthode suppose donc le calcul de la transformée de Fourier de l’accélérogramme de départ (ou accélérogramme brut).
Un calcul de transformée de Fourier inverse permet de trouver l’accélérogramme corrigé après avoir multiplié la FFT (Fast Fourier Transform) de l’accélérogramme de départ par la fonction de transfert entre le mouvement de la masse \({m}_{1}\) dans le modèle A et le modèle B.
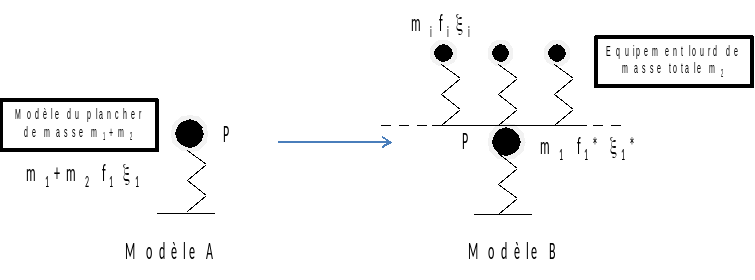
Figure 2 : Descriptions des modèles
Nous définissons les notations suivantes:
\({\omega}_{1}=\sqrt{\frac{{k}_{1}}{{m}_{1}+{m}_{2}}}\)
\({f}_{1}=\frac{1}{2\pi }\sqrt{\frac{{k}_{1}}{{m}_{1}+{m}_{2}}}\)
\({C}_{1}\) désigne le coefficient d’amortissement
\({\xi}_{1}=\frac{{C}_{1}}{2({m}_{1}+{m}_{2}){\omega}_{1}}\)
\({f}_{1}^{\ast }={f}_{1}\sqrt{1+\lambda }\)
\({\xi}_{1}^{\mathrm{\ast }}={\xi}_{1}\sqrt{1+\lambda }\)
\(\lambda =\frac{{m}_{2}}{{m}_{1}}\)
\({f}_{i}\in 0,40\mathit{Hz}\)
\({m}_{i}={\alpha}_{i}{m}_{2}\)
\({\Sigma}_{i}{\alpha}_{i}=1\)
\({\lambda}_{i}={\alpha}_{i}\lambda\)
Dans ces notations, nous avons désigné par \({\alpha}_{i}\) les masses effectives unitaires associées à chaque mode de l’équipement lourd et par \({\lambda}_{i}\) le rapport de masse associé à chacun de ces modes. Nous noterons \(N\) le nombre total d’oscillateurs constituant les équipements disposés sur le plancher.
Dans le modèle A, l’oscillateur a une masse \({m}_{2}+{m}_{1}\) car nous considérons que l’accélérogramme brut, calculé lors d’une analyse transitoire préalable, prend en compte les masses ajoutées. Cela suppose donc que le modèle éléments finis du plancher intègre les masses ajoutées des équipements lourds.
Les calculs nécessaires à la modification des spectres de plancher se déroulent de la manière suivante:
Identification des paramètres (fréquence \({f}_{1}\) et amortissement \({\xi}_{1}\) du support; amortissements \({\xi}_{i}\) de l’équipement lourd, rapport de masse \(\lambda\) , masses effectives unitaires \({\alpha}_{i}\) et fréquences \({\lambda}_{i}\) );
Lecture de l’accélérogramme au point du plancher étudié \(\ddot{x}(t)\) ;
Transformée de Fourier de l’accélérogramme, \(\stackrel{ˆ}{\ddot{x}}(\omega )\) ;
Calcul de la fonction de transfert entre le mouvement de la masse \({m}_{1}\) dans le modèle A et dans le modèle B (voir Figure 2), \(H(\omega )\) ;
Produit \(\stackrel{ˆ}{\ddot{x}}(\omega )H(\omega )\) ;
Transformée de Fourier inverse, \(\ddot{y}(t)\) ;
Calcul du spectre associé à \(\ddot{y}(t)\) à l’amortissement souhaité \(\xi\) .
Nous obtenons après calculs, une série de spectres aux valeurs d’amortissement souhaitées. Ces spectres constituent les spectres de plancher corrigés à inclure dans les recueils de spectres. Le calcul peut-être réalisé pour plusieurs points du plancher.
Calcul des fonctions de transfert#
Dans cette section, nous proposons de développer les équations conduisant à la correction des spectres de plancher par l’IPM.
La fonction de transfert entre les points P des modèles A et B, voir Figure 2 et Figure 3, est égale à la fonction de transfert entre la base et le point P dans le modèle B divisée par la fonction de transfert entre la base et le point P dans le modèle A.
Fonction de transfert pour le modèle B#
Ci-dessous les équations du mouvement pour une excitation \({\ddot{x}}_{b}\) à la base du modèle B:
Et:
Pour une sollicitation harmonique de pulsation \(p\) d’amplitude \({\widehat{x}}_{b}\) , les équations s’écrivent:
Et:
Qu’on peut ré-écrire:
Et:
A partir de l’équation , nous obtenons:
On définit les notations suivantes:
En utilisant ces notations dansl’équation , on obtient:
En définissant le déplacement absolu par \({X}_{i}={\widehat{x}}_{1}+{\widehat{x}}_{b}\) , la fonction de transfert au point 2 vaut:
Fonction de transfert dans le modèle A#
Avec les mêmes notations ne concernant que l’oscillateur simple représentant le support dans le modèle A:
Et:
Pour une sollicitation harmonique de pulsation \(p\) d’amplitude \({\widehat{x}}_{b}\) , les équations s’écrivent:
En définissant le déplacement absolu par \({X}_{1}={\widehat{x}}_{1}+{\widehat{x}}_{b}\) , la fonction de transfert au point 2 vaut:
Fonction de transfert totale#
La fonction de transfert totale \(H(\omega )\) est ensuite calculée en effectuant le simple rapport entre \({T}_{A}\) et \({T}_{B}\) :
On vérifie bien que lorsque \(\lambda =0\) ou \({f}_{i}\to \infty ` , pour :math:`i\in [2;N]\) , alors \(H(\omega )=1\) ; il n’y a donc, dans ces deux cas, aucune incidence sur le spectre brut d’entrée.
Conditions initiales#
La transformation de l’accélération du nœud P entre le modèle A et B suppose que les conditions initiales sont identiques entre ces deux modèles.
On vérifie que ces conditions sont nulles en comparant la valeur initiale par rapport à la valeur maximale du signal:
:math:`frac{left |
{ddot{x}}_{A}(0)right |
}{max(left |
{ddot{x}}_{A}(t)right |
)}<mathit{tol}` |
Si cette condition n’est pas satisfaite et que l’option de correction est choisie, on modifie la valeur initiale du signal du modèle A à 0.
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
12.7 |
N.GREFFET EDF/R&D/AMA |
Version initiale du document. |