r3.06.14 Introduction aux méthodes Hybrid High-Order (HHO)#
Résumé:
Ce document présente les méthodes HHO pour les problèmes en mécanique non-linéaire (petites et grandes déformations) et thermique linéaire et non-linéaire. Les mots clés correspondant dans AFFE_MODELE pour les modélisations mécaniques dans code_aster sont D_PLAN_HHO et 3D_HHO. Une extension aux formulations non-locales est possible (D_PLAN_GRAD_HHO et 3D_GRAD_HHO). Pour la thermqiue, il y a AXIS_HHO, PLAN_HHO et 3D_HHO. Il faut ensuite choisir entre les formulations CONSTANTE, LINEAIRE, QUADRATIQUE, CUBIQUE ou QUARTIQUE.
Des détails théoriques plus complets sont données dans [1] et [9].
Table des matières
Description de la méthode#
Cas de l’élasticité linéaire#
Nous allons présenter dans cette section les méthodes Hybrid High-Order (HHO) par l’intermédiaire du problème de l’élasticité linéaire. Le but est de décrire les grands principes de construction des méthodes HHO. Par simplicité, nous supposons que le domaine \(\Omega_{0}\subset \mathbb{R}^{d}\), avec \(2\le d\le 3\), est un domaine polyédrique borné, connexe et avec un bord Lipschitzien \(\Gamma =\partial \Omega_{0}\). Le domaine \(\Omega_{0}\) se déforme sous l’action d’un chargement volumique \(f \in {L}^{2}(\Omega_0;\mathbb{R}^{d})\) et des conditions de type Dirichlet homogène sont imposées sur le bord \(\Gamma\) (pour simplifier). La formulation faible du problème est:
où \({H}_{0}^{1}(\Omega_0;\mathbb{R}^{d})=\lbrace v \in {H}^{1}(\Omega_0;\mathbb{R}^{d}) : v=0 \text{ sur } \Gamma \rbrace\) et \(\mu>0\) et \(\lambda\ge 0\) sont les paramètres de Lamé du matériau. De plus, \(\nabla^{s}\) désigne la partie symétrique de l’opérateur gradient et \(\nabla \cdot\) l’opérateur divergence.
Cadre discret#
Maillage#
Nous considérons une famille de maillages \({(\mathcal{T}_{h})}_{h>0}\), où pour chaque \(h>0\), le maillage \(\mathcal{T}_{h}\) est composé de polyèdres ouverts, disjoints non-vides, qui ont des faces planes, et tels que \({\overline\Omega}_{0}={\cup}_{T \in \mathcal{T}_{h}}\overline{T}\). La taille globale du maillage est décrite par le paramètre \(h=\max_{T \in \mathcal{T}_{h}}{h}_{T}\), où \({h}_{T}\) est le diamètre de la cellule \(T\). Un sous-ensemble fermé \(F\) de \({\overline\Omega}_{0}\) est appelé une face si c’est un sous-ensemble ayant un intérieur relatif non-vide contenu dans un hyperplan affine \({H}_{F}\) et si:
soit il existe deux cellules distinctes \({T}_{1},{T}_{2} \in \mathcal{T}_{h}\) telles que \(F=\partial {T}_{1}\cap \partial {T}_{2}\cap {H}_{F}\) (et \(F\) est alors appelée une interface)
soit il existe une cellule \(T \in \mathcal{T}_{h}\) telle que \(F=\partial T\cap \Gamma \cap {H}_{F}\) (et \(F\) est alors appelée une face de bord).
Les faces du maillage sont réunies dans l’ensemble \(\mathcal{F}_{h}\) qui est ainsi partitionné en deux sous-ensembles, \(\mathcal{F}_{h}^{i}\) l’ensemble des interfaces et \(\mathcal{F}_{h}^{b}\) l’ensemble des faces de bord. Pour tout \(T \in \mathcal{T}_{h}\), \({F}_{T}\) désigne l’ensemble des faces du maillage qui sont incluses dans \(\partial T\) et \({n}_{T}\) la normale sortante unitaire à la cellule \(T\). Nous supposons dans la suite que la famille de maillages \({(\mathcal{T}_{h})}_{h>0}\) est régulière au sens spécifié dans [3], c’est-à-dire pour tout \(h>0\), il existe un sous-maillage conforme de \(\mathcal{T}_{h}\) composé de simplexes qui appartient à une famille régulière de maillages simpliciaux dans le sens habituel de Ciarlet et tel que chaque cellule \(T \in \mathcal{T}_{h}\) du maillage (respectivement, chaque face \(F \in \mathcal{F}_{h}\)) peut être décomposée en un nombre uniformément borné de sous-cellules (respectivement, sous-faces) qui appartiennent à seulement une cellule du maillage (respectivement, à seulement une face ou à l’intérieur d’une cellule) avec un diamètre uniformément comparable.
Approximation#
Soit \(k\ge 1\) un degré polynomial fixé. Dans chaque cellule \(T \in \mathcal{T}_{h}\) du maillage, les inconnues HHO locales sont la paire \(({v}_{T},{v}_{\partial T})\), où l’inconnue de cellule \({v}_{T} \in \mathbb{P}_{d}^{k}(T;\mathbb{R}^{d})\) est un polynôme à valeurs vectorielles à \(d\)-variables de degré au plus \(k\) dans la cellule \(T\), et \({v}_{\partial T} \in \mathbb{P}_{d-1}^{k}({F}_{T};\mathbb{R}^{d}) := {\prod}_{F \in {F}_{T}}\mathbb{P}_{d-1}^{k}(F;\mathbb{R}^{d})\) est un polynôme à valeurs vectorielles défini par morceaux à \((d-1)\)-variables de degré au plus \(k\) sur chaque face \(F \in {F}_{T}\) de la cellule \(T\). Nous écrivons de manière plus concise dans la suite que:
Les degrés de liberté sont illustrés dans cette représentation, où un point représente un degré de liberté (mais pas forcément un point physique d’évaluation) et la forme géométrique de la cellule est uniquement illustrative. Les degrés de liberté n’ont pas de sens physique a priori et d’un point de vue algébrique, ils correspondent simplement aux coefficients dans une base polynomiale.
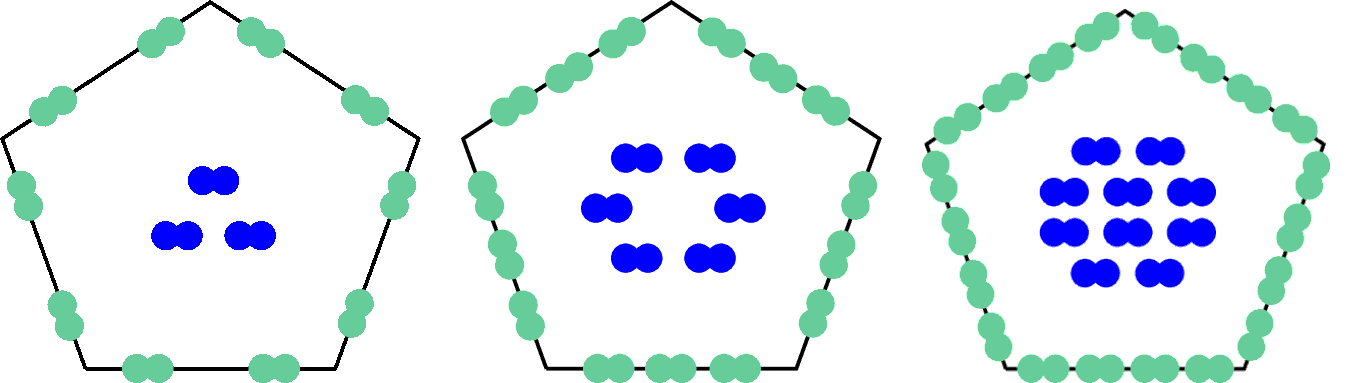
Fig. 139 Cellule pentagonale : degrés de liberté de la cellule (bleu) et des faces (vert) pour différentes valeurs de l’ordre d’approximation \(k=\lbrace 1,2,3\rbrace\) dans le cas bidimensionnel.#
L’espace \({U}_{T}^{k}\) est muni de la semi-norme discrète locale suivante:
avec la fonction constante par morceaux \({\gamma}_{\partial T\mid F}\) telle que:
où \({h}_{F}\) est le diamètre de \(F\). Nous introduisons également l’espace \(\mathrm{RM}(T)\) des mouvements de corps rigide sur \(T\) tel que:
où \({\mathrm{SO}}^{d}\) est l’ensemble des matrices de rotation dans l’espace euclidien réel. Notons que \(\nabla^{s}=0\) est équivalent à \(v \in \mathrm{RM}(T)\) et que \(\mathbb{P}_{d}^{0}(T;\mathbb{R}^{d})\subset \mathrm{RM}(T)\subset \mathbb{P}_{d}^{1}(T;\mathbb{R}^{d})\).
Lemme 1
Pour tout \({\widehat{v}}_{T} \in {U}_{T}^{k}\), on a \(\vert{\widehat{v}}_{T}\vert{}_{1,T}=0\) si et seulement si \({v}_{T}\) est un mouvement de corps rigide et que \({v}_{\partial T}\) est la trace de \({v}_{T}\) sur \(\partial T\).
Preuve:
Remarquons que \(\vert {\widehat{v}}_{T} \vert {}_{1,T}=0\) équivaut à:
Nous en déduisons que \({v}_{T}\) est un mouvement de corps rigide car \(\nabla^{s}{v}_{T}=0\) et que \({v}_{\partial T}\) est la trace de \({v}_{T}\) sur \(\partial T\) car \({v}_{T}-{v}_{\partial T}=0.\) ■
Opérateurs locaux de reconstruction et de stabilisation#
Les méthodes HHO se basent sur la reconstruction de différentes quantités discrètes qui vont venir jouer le rôle de leur contre-partie continue dans la formulation du problème discret. Dans le cas de la discrétisation du problème de l’élasticité linéaire, le premier ingrédient clé est l’opérateur de reconstruction du gradient symétrique \({E}_{T} : {U}_{T}^{k}\to \mathbb{P}_{d}^{k}(T;\mathbb{R}_{\mathrm{sym}}^{d\times d})\) à partir de l’inconnue de cellule \(v_T \in \mathbb{P}_{d}^{k}(T;\mathbb{R}^{d})\) et des inconnues de face \({v}_{\partial T} \in \mathbb{P}_{d-1}^{k}({F}_{T};\mathbb{R}^{d})\) composant la paire \({\widehat{v}}_{T}=({v}_{T},{v}_{\partial T})\). Pour tout \({\widehat{v}}_{T} \in {U}_{T}^{k}\), le gradient symétrique reconstruit \({E}_{T}({\widehat{v}}_{T}) \in \mathbb{P}_{d}^{k}(T;\mathbb{R}_{\mathrm{sym}}^{d\times d})\) est obtenu en résolvant le problème local suivant: pour tout \(\tau \in \mathbb{P}_{d}^{k}(T;\mathbb{R}_{\mathrm{sym}}^{d\times d})\) :
Résoudre ce problème implique de choisir une base polynomiale de \(\mathbb{P}_{d}^{k}(T;\mathbb{R})\) seulement et d’inverser la matrice de masse associée pour chaque composante du tenseur \({E}_{T}({\widehat{v}}_{T})\).
Le second ingrédient clé pour construire les méthodes HHO est l’opérateur de stabilisation locale qui permet d’imposer faiblement l’égalité entre les inconnues de face \({v}_{\partial T}\) et la trace de l’inconnue de cellule \({v}_{T}\) par le biais d’une pénalisation au sens des moindres carrés de la différence \({v}_{\partial T}-{v}_{T} \in \mathbb{P}_{d-1}^{k}({F}_{T};\mathbb{R}^{d})\). L’opérateur de stabilisation \({S}_{\partial T} \in \mathbb{P}_{d-1}^{k}({F}_{T};\mathbb{R}^{d})\) est défini tel que, pour tout \({\widehat{v}}_{T}=({v}_{T},{v}_{\partial T})\) :
où \({\Pi}_{\partial T}^{k}\) et \({\Pi}_{T}^{k}\) sont les projecteurs \(L^2\)-orthogonaux sur \(\mathbb{P}_{d-1}^{k}({F}_{T};\mathbb{R}^{d})\) et \(\mathbb{P}_{d}^{k}(T;\mathbb{R}^{d})\) respectivement. De plus, l’opérateur local de reconstruction d’un champ de déplacement d’ordre supérieur \({R}_{T} : {U}_{T}^{k}\to \mathbb{P}_{d}^{k+1}(T;\mathbb{R}^{d})\) est défini tel que, pour tout \({\widehat{v}}_{T} \in {U}_{T}^{k}\), \({R}_{T}({\widehat{v}}_{T}) \in \mathbb{P}_{d}^{k+1}(T;\mathbb{R}^{d})\) est obtenu en résolvant le problème de Neumann suivant: pour tout \(w \in \mathbb{P}_{d}^{k+1}(T;\mathbb{R}^{d})\) :
Cette reconstruction est définie de manière unique en imposant la valeur moyenne:
Comme \({E}_{T}({\widehat{v}}_{T})\) n’est pas stable au sens où \({E}_{T}({\widehat{v}}_{T})=0\) n’implique pas nécessairement que \({v}_{\partial T}={v}_{T}=\mathrm{cst}\), il est nécessaire de coupler l’opérateur \({E}_{T}\) à l’opérateur de stabilisation \({S}_{\partial T}\). Ainsi, l’ajout de ce terme de stabilisation permet de retrouver une propriété de stabilité locale qui est nécessaire pour démontrer la coercivité du problème discret.
Lemme 2 (Stabilité et caractère borné)
Soit l’opérateur de reconstruction du gradient symétrique défini par (5006) et l’opérateur de stabilisation défini par (5007). Soit \({\gamma}_{\partial T}\) défini par (5003). Alors, il existe \(0<{\alpha}_{s}<{\alpha}_{b}<+\mathrm{ \infty }\), indépendants de \(h\), tels que, pour tout \(T \in \mathcal{T}_{h}\) et tout \({\widehat{v}}_{T} \in {U}_{T}^{k}\) :
Preuve:
Voir Lemme 4 dans [3]. ■
Une autre propriété importante du gradient symétrique reconstruit est une propriété de commutativité qui est essentielle pour prouver la robustesse de la méthode dans la limite incompressible.
Lemme 3 (Commutativité)
Pour tout \(T \in \mathcal{T}_{h}\) et tout \(v \in {H}^{1}(T;\mathbb{R}^{d})\), l’égalité suivante est vraie:
où \({\widehat{I}}_{T}^{k} : {H}^{1}(T;\mathbb{R}^{d})\to {U}_{T}^{k}\) est l’opérateur local de réduction tel que:
Preuve:
Voir Proposition 3 dans [3]. ■
Pour la suite, nous définissons également l’opérateur de divergence discret \({D}_{T} : {U}_{T}^{k}\to \mathbb{P}_{d}^{k}(T;\mathbb{R} )\) tel que:
Remarque (Variantes des méthodes HHO):
Il existe plusieurs variantes de la méthode HHO présentée ici. Une fois le degré polynomial \(k\) fixé pour les inconnues de face, l’inconnue de cellule peut être de degré polynomial \(l \in \lbrace k-1,k,k+1\rbrace ,\:l\ge 1\) , sans changement des propriétés d’approximation et de stabilité (cf. [7] ).
Problème global discret HHO#
Définissons maintenant le problème global discret. Posons:
L’espace global des inconnues HHO est défini tel que:
Pour un élément générique \({\widehat{v}}_{h} \in {U}_{h}^{k}\), nous utilisons la notation \({\widehat{v}}_{h} := ({v}_{\mathcal{T}_{h}},{v}_{\mathcal{F}_{h}})\). Pour toute cellule \(T \in \mathcal{T}_{h}\) du maillage, nous notons \({\widehat{v}}_{T} \in {U}_{T}^{k}\) les composantes locales de \({\widehat{v}}_{h}\) liées à la cellule \(T\) et aux faces composant son bord \(\partial T\), et pour toute face \(F \in \mathcal{F}_{h}\), nous notons \({v}_{F}\) la composante de \({\widehat{v}}_{h}\) liée à la face \(F\). Des conditions aux limites de Dirichlet homogènes sont appliquées de manière forte sur les inconnues liées aux faces de bord \(F \in \mathcal{F}_{h}^{b}\). Nous introduisons pour cela le sous-espace:
Nous définissons la fonction \({\Vert \cdot\Vert }_{{U}_{h,0}^{k}}\) telle que:
Proposition 1
La fonction \({\Vert \cdot\Vert }_{{U}_{h,0}^{k}}\) définit une norme sur \({U}_{h,0}^{k}\).
Preuve:
Il suffit de montrer que pour tout \({\widehat{v}}_{h} \in {U}_{h,0}^{k}\), \({\Vert {\widehat{v}}_{h}\Vert }_{{U}_{h,0}^{k}}^{2}=0\) implique \({v}_{T}=0\) pour tout \(T \in \mathcal{T}_{h}\) et \({v}_{F}=0\) pour tout \(F \in \mathcal{F}_{h}\). Remarquons que \({\Vert {\widehat{v}}_{h}\Vert }_{{U}_{h,0}^{k}}^{2}=0\) implique que pour tout \(T \in \mathcal{T}_{h}\) :
Prenons une cellule \(T \in \mathcal{T}_{h}\) ayant au moins une face de bord \(F \in {F}_{T}\cap \mathcal{F}_{h}^{b}\), si bien que \({v}_{F}=0\). Alors \({v}_{T}{\mid}_{F}=0\) car \({v}_{T}{\mid}_{F}-{v}_{F}=0\). En combinant cela à \(\nabla^{s}{v}_{T}=0\) et avec une inégalité de Korn, nous obtenons \({v}_{T}=0\). De plus, comme \({v}_{T}{\mid}_{F'}-{v}_{F'}=0, \:\: \forall F' \in {F}_{T}\setminus F\), nous en déduisons \({v}_{F'}=0\) pour tout \(F' \in {F}_{T}\). Il suffit de prolonger ce raisonnement couche par couche de cellules jusqu’à avoir parcouru toutes les cellules \(T \in \mathcal{T}_{h}\) et toutes les faces \(F \in \mathcal{F}_{h}\). ■
Le problème discret est le suivant:
avec
Le membre de droite dans (4848) est obtenu en remplaçant les opérateurs continus par leurs versions discrètes et en ajoutant le terme de stabilisation. Nous pouvons montrer qu’il existe une unique solution \({\widehat{u}}_{h} \in {U}_{h,0}^{k}\) au problème (cela découle de la propriété de stabilité locale du Lemme 2).
De plus, comme les contributions dans (4847) sont calculées de manière locale aux cellules, il est très facile de paralléliser ces calculs.
Les méthodes HHO ont des taux de convergence optimaux sur des maillages généraux aussi bien en norme de l’énergie qu’en norme \(L^2\) (avec hypothèse de régularité elliptique).
Théorème 1 (Erreur en norme de l’énergie)
Soit \(k \geq 1\) et soit \(u \in {H}_{0}^{1}(\Omega_0;\mathbb{R}^{d})\), l’unique solution du problème (5000) et \({\widehat{u}}_{h} \in {U}_{h,0}^{k}\) l’unique solution du problème (4847). En supposant également la régularité additionnelle \(u \in {H}^{k+2}(\Omega_0;\mathbb{R}^{d})\), il existe une constante \(C>0\), indépendante de \(h\), \(\mu\), et \(\lambda\), telle que:
Preuve:
Voir Théorème 8 dans [3]. ■
Théorème 2 (Erreur en norme \(L^2\))
Sous les hypothèses du Théorème 1 et en supposant également la régularité elliptique, il existe une constante \(C>0\), indépendante de \(h\), \(\mu\), et \(\lambda\), telle que:
Preuve:
Voir Théorème 11 dans [3]. ■
Les estimations du Théorème 1 et du Théorème 2 sont robustes à limite incompressible puisqu’elles ne font intervenir que la régularité de \(\nabla \cdot u\) en fonction de \(\lambda\). Ces taux de convergence sont confirmés numériquement ainsi que la robustesse. Enfin, il est important de rappeler que ces taux de convergence sont supérieurs d’un ordre à ceux obtenus pour des éléments finis \({H}^{1}\)-conformes en utilisant des polynômes de degré \(k\) dans les cellules.
Implémentation#
L’implémentation dans code_aster de nouvelles méthodes numériques qui diffèrent des éléments de Lagrange peut être difficile. Nous listons les principales raisons:
Nombre limité de supports géométriques possible dans le maillage: triangle et quadrangle en 2D, et tétraèdre, hexaèdre, prisme et pyramide en 3D (pas de support des maillages polyédriques);
Connexion forte entre le support géométrique et l’élément choisi. Le degré d’approximation de la méthode est déterminé par le support géométrique. Par exemple, une approximation linéaire pour des triangles à 3 noeuds (TRIA3) et quadratique pour des triangles à 6 noeuds (TRIA6);
Les inconnues élément fini sont supportées uniquement par des noeuds physiques du maillage (et non par des faces ou des cellules du maillage comme c’est le cas pour les méthodes volumes finis, Galerkin discontinues, et HHO).
Le principal objectif pour l’implémentation des méthodes HHO dans code_aster est de réutiliser autant que possible l’architecture du code et de ne pas modifier les points critiques du code que sont:
Les structures de données
Les catalogues éléments finis
La localité des calculs élémentaires
L’opération d’assemblage
Nous nous limitons nous même à l’implémentation des méthodes HHO dans code_aster aux supports géométriques déjà existants. De plus, uniquement les approximations constante \(k=0\) (en thermique uniquement), linéaire \(k=1\), quadratique \(k=2\), cubique \(k=3\) et quartique \(k=4\) sont implémentées. L’approximation constante, \(k=0\), n’est pas disponible en mécanique car le noyau du tenseur des déformations comprend en plus des translations constantes, les rotations rigides. Les différentes modifications sont limitées à deux opérateurs:
CREA_MAILLAGE: option MODI_HHO
DEFI_MATERIAU: option HHO
Inconnues HHO et numérotation#
Nous rappelons que les inconnues HHO, \({\widehat{v}}_{T}=({v}_{T},{v}_{\partial T})\in {U}_{T}^{k}\), que nous calculons sont les coefficients des polynômes des cellules et des faces (ces coefficients n’ont a priori aucun sens physique). Puisque, l’assemblage doit être réalisé face par face (et cellule par cellule) et que les inconnues HHO ne peuvent être supportées que par des noeuds physiques du maillage dans code_aster, nous avons besoin que chaque face du maillage possède au moins un noeud qui n’est partagé avec aucune autre face du maillage (typiquement un noeud localisé au barycentre de la face) et qu’il y ait un noeud au barycentre de la cellule. C’est le cas en 2D pour le triangle à 7 noeuds (TRIA7) et le quadrangle à 9 noeuds (QUAD9), et en 3D pour l’hexaèdre à 27 noeuds (HEXA27). Ces supports géométriques correspondent aux éléments quadratiques pour les éléments isoparamétriques. Malheureusement, il n’y a pas dans code_aster de tétraèdres, prismes et pyramides avec cette propriété. C’est pourquoi, nous avons ajouté un convertisseur de maillage dans CREA_MAILLAGE nommé MODI_HHO qui permet de transformer un tétraèdre à 4 noeuds en un tétraèdre à 15 noeuds (de même pour les prismes (PENTA21) et pyramides (PYRAM19)). Les nouveaux noeuds sont localisés au barycentre des faces et de la cellule.
Les inconnues de face \({v}_{F}\) pour les faces \(F\in {F}_{h}\) sont supportées par le noeud qui est localisé au barycentre de la face \(F\). Ces noeuds physiques du maillage qui supportent les inconnues de face sont nommés unknown_nodes. De plus, comme les faces sont supposées planes, nous utilisons les noeuds sommets pour décrire la géométrie des cellules et des faces; et pour calculer les différentes intégrales. Ces noeuds physiques du maillage qui décrivent la géométrie sont nommés geometric_nodes. Finalement, les noeuds localisés aux milieux des segments ne sont pas utilisés et sont nommés empty_nodes. Ces différents catégories de noeuds sont illustrés ici. Ces astuces sur la localisation des inconnues HHO permettent de réutiliser les structures de données et l’assemblage sans modifications.
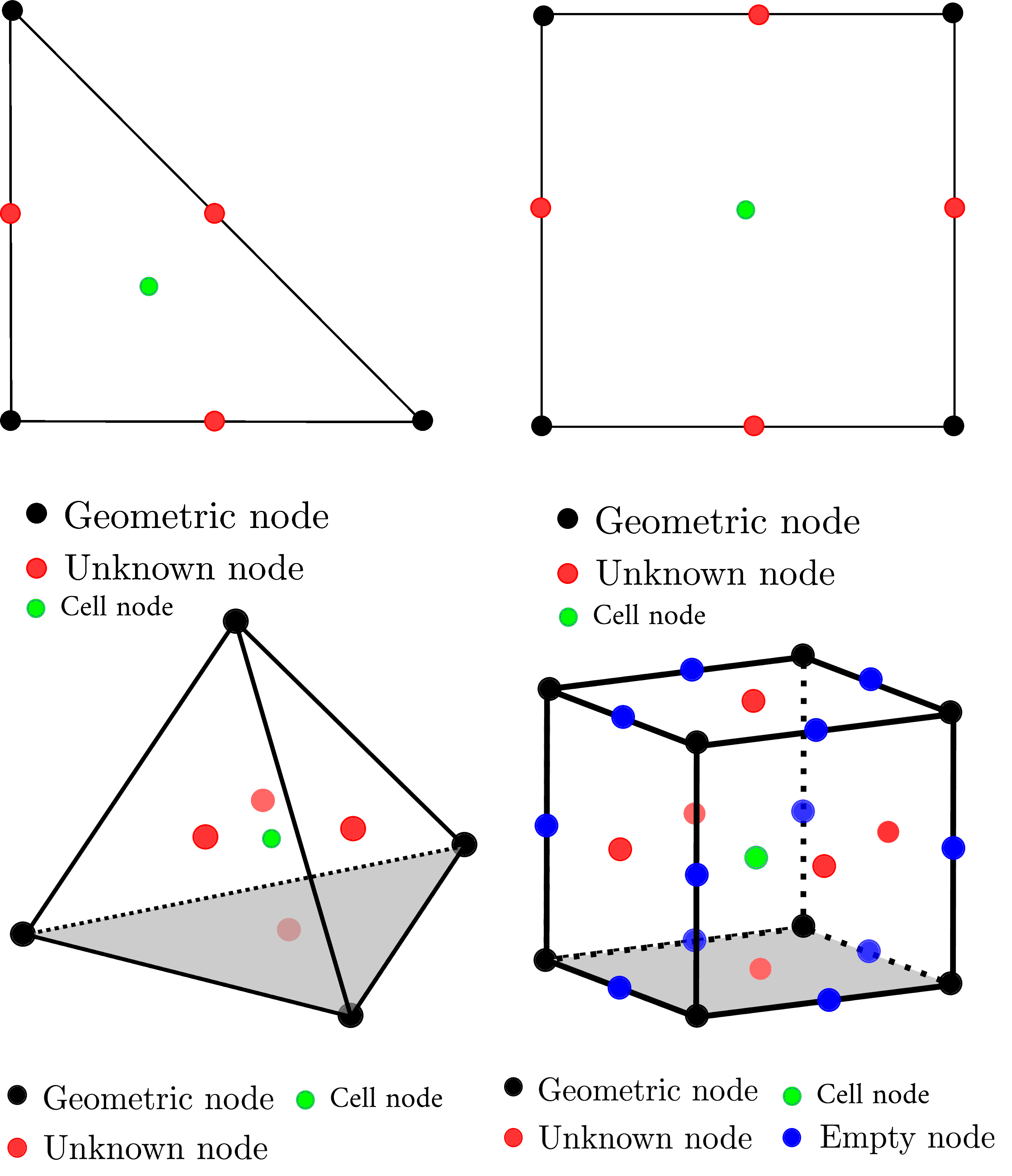
Fig. 140 Différents catégories de noeuds utilisés pour les supports géométriques TRIA7, QUAD9, TETRA15 et HEXA27.#
Remarque (Condensation statique):
La condensation statique (ou complément de Schur) permet d’éliminer localement les inconnues de cellule dans les contributions élémentaires (à la fin, un problème plus petit composé uniquement des inconnues de face est résolu). Une des difficultés principales est que les contributions élémentaires sont calculées localement à l’élément (cellule ou face) puis assemblées directement dans le problème global en utilisant la numérotation. Alors que pour les méthodes HHO, la condensation statique doit être réalisée avant l’assemblage pour éliminer les inconnues de cellules. Pour des raisons de simplicité la condensation statique n’est pas implémentée afin de ne pas changer l’architecture du code. Cependant, il est possible de l’utiliser en dehors des opérateurs avec le module HHO en python. Un exemple est donné dans zzzz513f.
Conditions aux limites de Dirichlet#
Les conditions aux limites de Dirichlet sont imposées fortement en modifiant la matrice et le chargement. L’utilisateur doit spécifier les déplacements imposés sur le bord de Dirichlet. Cependant, il n’est pas évident pour l’utilisateur de donner les valeurs des inconnues de faces et cellules car ces coefficients n’ont a priori pas de sens physique. Nous avons ajouté un traducteur automatique qui calcule la projection \(L^2\), \({\Pi}_{F}^{k}({u}_{D})\), et impose la valeur \({v}_{F}={\Pi}_{F}^{k}({u}_{D})\) à partir du déplacement donné \({u}_{D}\) aux noeuds de la face (au sens continu). En pratique, dans AFFE_CHAR_CINE, il suffit de donner les conditions sur DX, DY et/ou DZ et l’opérateur le traduit automatiquement en conditions sur les polynômes HHO.
Post-traitement#
Les inconnues HHO sont les coefficients de polynômes. Ces coefficients n’ont a priori pas de sens physique. Ainsi, un post-traitement doit être appliqué afin de pouvoir visualiser ces résultats. Nous créons un nouveau champ NOEU qui viendra interpoler au sens des éléments de Lagrange les inconnues HHO dans le champ HHO_DEPL à la fin du calcul. La valeur du déplacement en un noeud du maillage est la moyenne des valeurs des inconnues de cellule qui contient ce noeud. Notons que ce champ est continu contrairement aux champs HHO. Il faut bien noter que ce champ n’est pas en équilibre avec celui des contraintes. Il est là à des fins purement visuels. Le même post-traitement est appliqué aux champs de vitesse et d’accélération dans le cas dynamique.
Périmètre d’usage#
La méthode HHO est utilisable uniquement en mécanique non-linéaire statique et transitoire (STAT_NON_LINE/DYNA_NON_LINE) et en thermique linéaire et non-linéaire (THER_LINEAIRE/THER_NON_LINE)
Les fonctionnalités suivantes sont exclues:
contact/frottement
réduction de modèle
macro-éléments
calcul de modes vibratoires ou de critères de flambement
La méthode est utilisable pour les lois de comportement en petites et grandes déformations (modèle GDEF_LOG, PETIT, GREEN_LAGRANGE).
Par ailleurs, la méthode HHO ne peut être utilisée simultanément avec une méthode élément fini standard. Les conditions limites ne peuvent être affectées que par élimination (AFFE_CHAR_CINE (_F)).
L’essentiel des chargements volumiques et surfaciques sont disponibles.
La méthode fonctionne sur des tout les éléments 2D et 3D du code. Il faut éventuellement utiliser CREA_MAILLAGE/MODI_HHO pour rendre le maillage compatible.
Certains paramètres comme le coefficient de stabilisation peuvent être défini par zone dans DEFI_MATERIAU/HHO. Si aucune valeur n’est donnée une valeur automatique est calculée à partir des paramètres élastiques.
Bibliographie#
Pignet, Thèse de doctorat, Hybrid High-Order methods for nonlinear solids mechanics, 2019.
Di Pietro., A. Ern, S. Lemaire (2014) An arbitrary-order and compact-stencil discretization of diffusion on general meshes based on local reconstruction operators. Comput Methods Appl Math 14(4), 461-472.
Di Pietro, A. Ern (2015) A Hybrid High-Order locking-free method for linear elasticity on general meshes. Comput Methods Appl Mech Engrg 283, 1-21.
Abbas, A. Ern, N. Pignet (2018) Hybrid High-Order methods for finite deformations of hyperelastic materials. Comput Mech 62(4), 909-928.
Abbas, A. Ern, N. Pignet (2019) A Hybrid High-Order method for incremental associative plasticity with small deformations. Comput Methods Appl Mech Engrg 346, 891-912.
Abbas, A. Ern, N. Pignet (2019) A Hybrid High-Order methods for finite elastoplastic deformations within a logarithmic strain framework. Int. J. Num. Meth. Engng 120, 303–327.
Cockburn, D. Di Pietro, A. Ern (2016) Bridging the Hybrid High-Order and Hybrydisable Discontinuous Galerkin methods. ESAIM Math Model Numer Anal 50(3), 635-650.
Droniou, R. Eymard, T. Gallouët, and R. Herbin (2010) A unified approach to mimeticfinite difference, hybrid finite volume and mixed finite volume methods. Math. Models. Methods Appl. Sci. 20(2) , 265–295.
Cicuttin, A. Ern, and N. Pignet (2021) Hybrid high-order methods. A primer with application to solid mechanics, SpingerBriefs in Mathematics