r7.01.09 Loi de comportement ENDO_ORTH_BETON#
Résumé:
Cette documentation présente l’écriture théorique et l’intégration numérique de la loi de comportement ENDO_ORTH_BETON développée par [bib1], qui décrit l’anisotropie induite par l’endommagement dans le béton, ainsi que les effets unilatéraux (comportement différent en traction et en compression). La validation du modèle par rapport à des résultats expérimentaux est aussi proposée dans ce document.
Table des matières
Expression de l’énergie libre#
Prise en compte de la refermeture des fissures#
Si l’on cherche à tenir compte de l’effet de refermeture, il faut porter une grande attention à la continuité des contraintes en fonction des déformations (ce qui est une condition indispensable pour une loi de comportement dans un logiciel de calcul par éléments finis), Cf [bib2]. En effet, si l’on modélise cet effet de façon trop simpliste, la loi de comportement a de grande chance de présenter une réponse discontinue. Une solution est de décrire finement ce que l’on appelle traction et compression, sachant qu’en traction (resp. compression) la fissure sera considérée «ouverte» (resp.«fermée»). Une solution naturelle est de se placer dans un repère propre de déformation. Dans un tel repère, l’énergie libre élastique s’écrit (\(\lambda\) et \(m\) désignant les coefficients de Lamé):
\(\varphi (\varepsilon )=\frac{\lambda}{2}{(\text{tr}\varepsilon )}^{2}+\mu \sum_{i}{\varepsilon}_{i}^{2}\) éq 2.1-1
On peut alors définir:
une traction ou compression volumique, suivant le signe de :math:`text{tr}varepsilon ` ,
une traction ou compression dans chaque direction propre, suivant le signe de \({\varepsilon}_{i}\) .
L’énergie libre élastique peut alors s’écrire:
\(\varphi (\varepsilon )=\frac{\lambda}{2}\left[{(\text{tr}\varepsilon )}_{+}^{2}+{(\text{tr}\varepsilon )}_{-}^{2}\right]+\mu \left[\text{tr}({\varepsilon}_{+}^{2})+\text{tr}({\varepsilon}_{-}^{2})\right]\) éq 2.1-2
avec les définitions suivantes pour les parties positive et négative:
\({(\text{tr}\varepsilon )}_{+}=H(\text{tr}\varepsilon )\text{tr}\varepsilon ` ; :math:`{(\text{tr}\varepsilon )}_{-}=H(-\text{tr}\varepsilon )\text{tr}\varepsilon\) ; \(\text{tr}({\varepsilon}_{+}^{2})=\sum_{i}H({\varepsilon}_{i}){\varepsilon}_{i}^{2}\) ; \(\text{tr}({\varepsilon}_{-}^{2})=\sum_{i}H(-{\varepsilon}_{i}){\varepsilon}_{i}^{2}\)
où \(H\) est la fonction de Heaviside.
Remarque:
Une étude plus détaillée des propriétés des parties positive et négative d’un tenseur est faite en annexe 1.
Introduction des variables d’endommagement#
Compte tenu de la complexité des mécanismes d’endommagement, et après avoir constaté qu’il était difficile de décrire le comportement du béton en n’utilisant qu’une seule variable d’endommagement, nous avons choisi d’introduire deux variables d’endommagement:
Un tenseur \(D\) d’ordre 2 relatif à l’endommagement créé en traction
Un scalaire \(d\) relatif à l’endommagement créé en compression
Remarque:
Le choix d’un tenseur d’ordre 2 pour modéliser l’endommagement de traction est relativement classique et intuitif. Il permet de décrire l’orientation privilégiée des fissures orthogonalement à la direction de plus grande traction. La question de l’endommagement créé en compression (orthotrope ou isotrope?) est beaucoup moins claire.
Supposons pour simplifier que les fissures ne peuvent être générées que dans les plans orthogonaux à \({\overrightarrow{e}}_{1}\) , \({\overrightarrow{e}}_{2}\) ou \({\overrightarrow{e}}_{3}\) *. Dans le cas d’une traction simple dans la direction* \({\overrightarrow{e}}_{1}\) , les fissures sont créées dans le plan orthogonal à \({\overrightarrow{e}}_{1}\) , ce qui entraîne une perte de rigidité dans la direction \({\overrightarrow{e}}_{1}\) *. Si l’on exerce ensuite une traction simple dans la direction* \({\overrightarrow{e}}_{2}\) , on ne «voit» pas la fissure car le chargement est parallèle au plan de la fissure et la rigidité n’est pas affectée. L’endommagement est donc clairement anisotrope en traction. Dans le cas d’une compression simple dans la direction \({\overrightarrow{e}}_{1}\) , on crée des fissures dans les plans orthogonaux à \({\overrightarrow{e}}_{2}\) et \({\overrightarrow{e}}_{3}\) *. Si l’on charge ensuite en compression dans la direction* \({\overrightarrow{e}}_{2}\) , on «voit» les fissures orthogonales à \({\overrightarrow{e}}_{3}\) *. La rigidité dans la direction* \({\overrightarrow{e}}_{2}\) est donc plus faible que la rigidité normale non dégradée, mais elle est plus forte que la rigidité dans la direction \({\overrightarrow{e}}_{1}\) car la compression dans la direction \({\overrightarrow{e}}_{1}\) est sensible à toutes les fissures, c’est-à-dire orthogonales à \({\overrightarrow{e}}_{2}\) et à \({\overrightarrow{e}}_{3}\) . Par conséquent, l’endommagement en compression semble moins anisotrope qu’en traction, sans être toutefois complètement isotrope. En l’absence d’argument physique clair sur le caractère isotrope ou anisotrope de l’endommagement en compression, nous avons choisi de le prendre isotrope pour des raisons de simplicité.
On pose \(B=I-D\) représentant l’intégrité du matériau en traction. On introduit l’endommagement de traction dans les termes «positifs» de l’énergie libre [éq 2.1-2] et l’endommagement de compression dans les termes négatifs. L’énergie libre est à présent définie comme suit:
\(\varphi (\varepsilon ,\mathrm{\Beta },d)=\frac{\lambda}{2}\left[{(\text{tr}\text{B \varepsilon })}_{+}^{2}+{(1-d)}^{2}{(\text{tr}\varepsilon )}_{-}^{2}\right]+\mu \left[\frac{1}{4}\text{tr}({(\mathrm{\Beta \; \varepsilon }+\mathrm{\varepsilon \; B})}_{+}^{2})+{(1-d)}^{2}\text{tr}({\varepsilon}_{-}^{2})\right]\) éq 2.2-1
Remarque:
La convexité de l’énergie libre vis-à-vis, de la déformation d’une part, et des variables d’endommagement simultanément d’autre part, est bien respectée. On se référera à [bib2] et [bib1] pour une démonstration.
Bornes de l’endommagement#
La ruine, ou création d’une fissure traversant complètement l’élément de matière considéré, impose une borne supérieure à l’endommagement. Cette borne est imposée sur chaque valeur propre de l’endommagement de traction (\({D}_{i}\in \left[0,1\right]\) où les \({D}_{i}\) désignent les valeurs propres de \(D\) ), ce qui permet d’atteindre la ruine dans 3 directions orthogonales. Une fonction indicatrice convexe par rapport à l’endommagement, \({I}_{]-\infty ,1]}\) pour D ou \({I}_{[0,\infty [:ref:\)}` pour \(B\) , est donc utilisée pour contrôler chacune des valeurs propres de l’endommagement (cf. [bib2 <}` pour \(B\) , est donc utilisée pour contrôler chacune des valeurs propres de l’endommagement (cf. [bib2>`]). De même, on utilise une indicatrice sur la valeur de l’endommagement scalaire de compression. On obtient l’expression de l’énergie libre suivante:
\(\begin{array}{cc}\varphi (\varepsilon ,B,d)& =\frac{\lambda}{2}\left[{(\text{tr}B\varepsilon )}_{+}^{2}+{(1-d)}^{2}{(\text{tr}\varepsilon )}_{-}^{2}\right]+\mu \left[\frac{1}{4}\text{tr}({(B\varepsilon +\varepsilon B)}_{+}^{2})+{(1-d)}^{2}\text{tr}({\varepsilon}_{-}^{2})\right]\\ & +{I}_{[0,\infty [}\left[\min({B}_{i})\right]+{I}_{]-\infty ,1]}\left[d\right]\end{array}\) éq 2.3-1
Remarque:
Il résulte de cette expression qu’une fois que l’endommagement vaut 1 dans une direction propre, cette direction propre est désormais bloquée et l’endommagement ne peut plus évoluer que dans le plan perpendiculaire à cette direction. La démonstration de ce point se trouve en annexe 2.
Introduction d’une énergie bloquée#
Nous proposons d’introduire une énergie bloquée afin de mieux contrôler l’évolution de l’endommagement en fonction du chargement, sous la forme utilisée par [bib4]. L’idée consiste à introduire un terme supplémentaire dans l’énergie ne dépendant que de l’endommagement, et pas de l’état de déformation. Il en résulte alors un terme supplémentaire dans la dérivation des forces thermodynamiques qui contrôlent l’évolution de l’endommagement (cf. section [§ 3 ]). Ce terme supplémentaire n’implique en revanche aucune modification de l’expression de la contrainte.
L’énergie s’écrit de la manière suivante:
\(\begin{array}{cc}\varphi (\varepsilon ,B,d)& =\frac{\lambda}{2}\left[{(\text{tr}B\varepsilon )}_{+}^{2}+{(1-d)}^{2}{(\text{tr}\varepsilon )}_{-}^{2}\right]+\mu \left[\frac{1}{4}\text{tr}({(B\varepsilon +\varepsilon B)}_{+}^{2})+{(1-d)}^{2}\text{tr}({\varepsilon}_{-}^{2})\right]\\ & +{I}_{[0,\infty [}\left[\min({B}_{i})\right]+{I}_{]-\infty ,1]}\left[d\right]+{\psi}^{\text{bloquée}}(B,d)\end{array}\) éq 2.4-1
où \({\psi}^{\text{bloquée}}(B,d)\) est une fonction convexe de l’endommagement. On choisit de prendre cette énergie supplémentaire nulle lorsque le matériau est sain. Elle doit de plus être exprimée au moyen d’invariants du tenseur d’endommagement. On désire enfin que le terme supplémentaire dans l’expression des forces thermodynamiques dépende de l’endommagement, ce qui permet d’éliminer le choix d’un terme linéaire en endommagement pour l’énergie \({\psi}^{\text{bloquée}}(B,d)\) .
Nous avons opté pour l’expression suivante:
\(\begin{array}{cc}{\psi}^{\text{bloquée}}(B,d)& =\frac{{\gamma}_{B}}{2}\text{tr}({(\text{I - B})}^{2})+{\gamma}_{d}{d}^{2}\\ & =\frac{{\gamma}_{B}}{2}\text{tr}({D}^{2})+{\gamma}_{d}{d}^{2}\end{array}\) éq 2.4-2
où \({\gamma}_{B}\) et \({\gamma}_{d}\) sont des paramètres du modèle.
Remarque:
|
Expression finale de l’énergie libre, des contraintes et des forces thermodynamiques associées aux variables d’endommagement#
L’expression finale de l’énergie libre s’écrit:
\(\begin{array}{cc}\varphi (\varepsilon ,B,d)& =\frac{\lambda}{2}\left[{(\text{tr}B\varepsilon )}_{+}^{2}+{(1-d)}^{2}{(\text{tr}\varepsilon )}_{-}^{2}\right]+\mu \left[\frac{1}{4}\text{tr}({(B\varepsilon +\varepsilon B)}_{+}^{2})+{(1-d)}^{2}\text{tr}({\varepsilon}_{-}^{2})\right]\\ & +{I}_{[0,\infty [}\left[\min({B}_{i})\right]+{I}_{]-\infty ,1]}\left[d\right]+{\psi}^{\text{bloquée}}(B,d)\end{array}\) éq 2.5-1
L’expression des contraintesse déduit de l’énergie par dérivation par rapport aux déformations:
\(\begin{array}{}\sigma (\varepsilon ,B,d)=\frac{\partial \varphi }{\partial \varepsilon }=\lambda \left[{(\text{tr}B\varepsilon )}_{+}B+{(1-d)}^{2}{(\text{tr}\varepsilon )}_{-}I\right]\\ +\mu \left[\frac{1}{2}({(B\varepsilon +\varepsilon B)}_{+}B+B{(B\varepsilon +\varepsilon B)}_{+})+2{(1-d)}^{2}{\varepsilon}_{-}\right]\end{array}\) éq 2.5-2
La continuité de la contrainte résulte de la continuité des valeurs propres d’une matrice vis-à-vis de cette matrice (cf. théorème d’Ostrowski dans [bib4]).
Remarque:
Un défaut apparaît cependant au passage «ouvert-fermé». Les domaines d’activation et de désactivation des termes d’ouverture et de fermeture des fissures ne coïncident pas. Ceci est dû au fait que l’ouverture et la fermeture ne sont pas associées à la séparation en parties positive et négative des mêmes grandeurs (ouverture: endommagement combiné à la déformation, fermeture: déformation seule). Ceci n’affecte cependant pas la propriété de continuité. Il apparaît de plus que ce défaut est limité à une zone proche de l’origine des déformations, où il n’engendre pas d’aberration physique, et qu’il n’a aucune incidence en dehors de cet intervalle (cf. [bib2]). Le formalisme proposé dans [bib3], permettant d’assurer la continuité de la contrainte tout en prenant en compte l’effet de refermeture des fissures, présente le même défaut.
On déduit par ailleurs de l’énergie libre l’expression des forces thermodynamiques associées aux endommagements:
\({F}^{B}(\varepsilon ,B)=-\frac{\partial \varphi }{\partial B}=-\lambda {(\text{tr}B\varepsilon )}_{+}\varepsilon -\frac{\mu}{2}\left[{(B\varepsilon +\varepsilon B)}_{+}\varepsilon +\varepsilon {(B\varepsilon +\varepsilon B)}_{+}\right]+{\gamma}_{B}(\text{I - B})\) éq 2.5-3
\({F}^{d}(\varepsilon ,d)=-\frac{\partial \varphi }{\partial d}=\lambda (1-d){(\text{tr}\varepsilon )}_{-}^{2}+2\mu (1-d)\text{tr}({\varepsilon}_{-}^{2})-2{\gamma}_{d}d\) éq 2.5-4
Chaque force thermodynamique est constituée des deux parties:
Une partie dépendant de la déformation et de l’endommagement, qui est dérivée de la partie élastique de l’énergie.
Une partie ne dépendant que de l’endommagement, qui est dérivée de l’énergie bloquée. Ce terme va jouer le rôle d’un écrouissage, et permet de contrôler la réponse contrainte‑déformation. On voit que les termes dérivant de l’énergie bloquée dans chacune des forces thermodynamiques sont indépendants l’un de l’autre, ce qui permet de contrôler plus facilement l’évolution de chacune des variables d’endommagement.
Loi d’évolution des variables d’endommagement#
Loi d’évolution#
Pour que le modèle ENDO_ORTH_BETON entre dans le cadre des matériaux standards généralisés, on doit se doter d’un potentiel de dissipation. Pour des raisons de simplicité, on définit plutôt le domaine de réversibilité, comme pour la loi ENDO_ISOT_BETON (cf. doc. [R7.01.04]).
Remarque:
D’un point de vue formel, les matériaux standards généralisés sont caractérisés par un potentiel de dissipation fonction positivement homogène de degré 1, transformée de Legendre-Fenchel de la fonction indicatrice du domaine de réversibilité. On peut donc choisir de définir, soit un potentiel de dissipation, soit un domaine de réversibilité.
La première idée est de définir deux critères d’évolution correspondant à chacune des variables internes. Cette solution est tout à fait envisageable dans la mesure où les forces thermodynamiques sont dissociées l’une de l’autre. Il s’avère cependant que cette solution possède deux inconvénients:
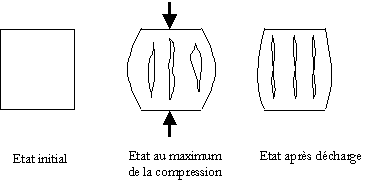
Le premier est d’ordre «physique». Considérons un échantillon soumis à une compression uniaxiale. On peut imaginer que le critère de compression seul est atteint et que le critère de traction n’est pas activé. Seul l’endommagement de compression évolue alors. Si l’on soumet cet échantillon, après décharge, à une traction dans une direction orthogonale à l’axe de compression précédent, le matériau se comporte d’après le modèle comme un matériau sain, malgré la création, en réalité, de microfissures parallèlement à l’axe de compression, donc perpendiculairement à l’axe de traction.
Le second inconvénient est d’ordre pratique. Il est en effet plus facile de traiter numériquement un seul critère, faisant intervenir un seul multiplicateur de Lagrange (cf. [Figure 3.1-a]), plutôt que deuxcritères séparés, faisant intervenir deux multiplicateurs de Lagrange et pouvant créer des zones où la direction d’écoulement n’est pas définie a priori (cf. [Figure 3.1-b]).
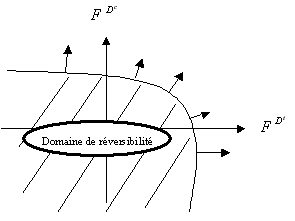
Figure 3.1-a
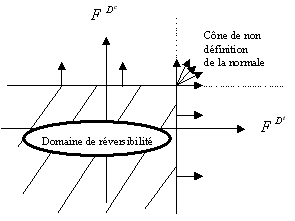
Figure 3.1-b
On décide donc d’introduire un unique critère couplant l’évolution des deux variables d’endommagement:
\(g({F}^{B},{F}^{d})=\sqrt{\alpha {\parallel {F}_{-}^{B}\parallel }^{2}+(1-\alpha ){({F}_{+}^{d})}^{2}}-K(\varepsilon )\le 0\) éq 3.1-1
où \(K(\varepsilon )\) est un seuil dépendant de l’état de déformation (ce point sera commenté dans la section [§ 3.2 ]).
L’évolution des variables d’endommagement est alors déterminée par les conditions de Kuhn-Tucker:
\(\lbrace \begin{array}{cc}\begin{array}{}\dot{d}=0\\ \dot{B}=0\iff \dot{D}=0\end{array}& \text{pour}g<0\\ & \\ \begin{array}{}\dot{d}\ge 0\\ {\dot{B}}_{i}\le 0\iff {\dot{D}}_{i}\ge 0\end{array}& \text{pour}g=0\end{array}\) éq 3.1-2
Remarque:
Le critère fait intervenir seulement la partie positive \({F}_{+}^{d}\) de \({F}^{d}\) et négative \({F}_{-}^{B}\) de \({F}^{B}\) afin d’imposer la croissance de l’endommagement. Cette condition est assurée dans le potentiel de dissipation par l’introduction des fonctions indicatrices \({I}_{{ℝ}^{+}}(\dot{d})\) et \({I}_{{ℝ}^{-}}({\dot{B}}_{i})\) (équivalente à \({I}_{{ℝ}^{+}}({\dot{D}}_{i})\) ).
Remarque:
Le critère elliptique est convexe dans l’espace des forces thermodynamiques, ce qui assure la convexité du potentiel de dissipation.
Dans le cadre des matériaux standards généralisés, l’évolution des variables internes suit la loi d’écoulement associée au critère via le principe de normalité:
\(\dot{B}=\dot{\eta}\frac{\partial g}{\partial {F}^{B}}=\dot{\eta}\frac{\alpha {F}_{-}^{B}}{\sqrt{\alpha {\parallel {F}_{-}^{B}\parallel }^{2}+(1-\alpha ){({F}_{+}^{d})}^{2}}}\) éq 3.1-3
\(\dot{d}=\dot{\eta}\frac{\partial g}{\partial {F}^{d}}=\dot{\eta}\frac{(1-\alpha ){F}_{+}^{d}}{\sqrt{\alpha {\parallel {F}_{-}^{B}\parallel }^{2}+(1-\alpha ){({F}_{+}^{d})}^{2}}}\) éq 3.1-4
On peut intégrer le dénominateur commun dans le multiplicateur de Lagrange pour avoir une relation plus simple:
\(\dot{B}=\dot{\eta}\frac{\partial g}{\partial {F}^{B}}=\dot{\gamma}\alpha {F}_{-}^{B}\) éq 3.1-5
\(\dot{d}=\dot{\eta}\frac{\partial g}{\partial {F}^{d}}=\dot{\gamma}(1-\alpha ){F}_{+}^{d}\) éq 3.1-6
Ce système fait intervenir un unique multiplicateur plastique \(\dot{\gamma}\) .
Les équations d’évolution assurent la positivité du potentiel de dissipation:
\({F}^{B}:\dot{B}+{F}^{d}\dot{d}=\dot{\gamma}\left[\alpha {\parallel {F}_{-}^{B}\parallel }^{2}+(1-\alpha ){({F}_{+}^{d})}^{2}\right]\ge 0\) éq 3.1-7
Remarque:
D’un point de vue théorique, l’endommagement de compression et les valeurs propres du tenseur d’endommagement de traction peuvent atteindre une valeur de 1. Cela correspond à un élément complètement endommagé dont la rigidité est nulle, ainsi que la contrainte. D’un point de vue numérique, cette situation entraîne des instabilités car la matrice de rigidité devient singulière. Un choix de programmation est fait pour éviter ce problème : borner l’endommagement à une valeur \(1–\mathrm{tol}\) où \(\mathrm{tol}\) est fixée à 0,01. La nécessité de borner ainsi l’endommagement a pour conséquence l’apparition d’une rigidité résiduelle. Autrement dit, même si le matériau est complètement endommagé dans une direction, il continue à résister, certes faiblement, selon cette direction.
Fonction seuil dépendant de la déformation#
Afin de mieux contrôler la dissymétrie du comportement entre la traction et la compression (rapport 10 des limites de rupture), nous avons introduit une fonction seuil dépendant de l’état de déformation dans le critère [éq 3.1-1]. Le rôle de cette fonction seuil est de repousser la limite d’élasticité en compression. On souhaite de plus que la contrainte de rupture en traction simple ne puisse être dépassée lors d’un essai biaxial (cf. [bib1] pour une étude détaillée de la fonction seuil).
La fonction que nous proposons est la suivante:
\(K(\varepsilon )={k}_{0}-{k}_{1}{(\text{tr}\varepsilon )}_{-}\arctan(-\frac{{(\text{tr}\varepsilon )}_{-}}{{k}_{2}})\) éq 3.2-1
Cette fonction seuil introduit 3 paramètres pour le modèle.
Remarque:
Cette fonction n’a pas été optimisée pour le cas des chargements de compression triaxiale. On rappelle à ce titre que la loi ENDO_ORTH_BETON a été conçue pour décrire de manière plus fine l’endommagement de traction, la description de l’endommagement de compression restant isotrope. Une autre loi de comportement doit donc être utilisée pour des applications faisant intervenir des chargements de forte compression triaxiale.
Lorsque la trace des déformations est positive, le seuil reste constant: \(K(\varepsilon )={k}_{0}\) . Le seuil augmente lorsqu’on passe en compression, ce qui permet de repousser la limite d’élasticité, et par conséquent la limite de rupture. On note que la fonction « arctan » a été introduite pour mieux représenté l’enveloppe de rupture dans le cas des essais biaxiaux (une étude détaillée se trouve dans [bib1]).
La [Figure 3.2-a] nous montre la comparaison entre la limite d’élasticité fournit par un seuil constant et celle obtenue avec un seuil dépendant de la trace des déformations dans le cas d’essais biaxiaux en contrainte plane.
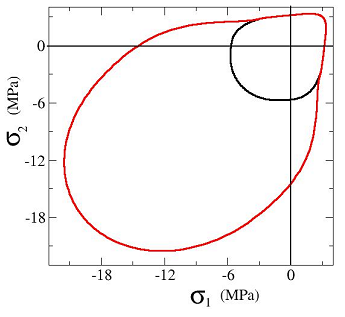
Figure 3.2-a: Enveloppe du domaine d’élasticité pour des chargements biaxiaux en contrainte plane.
Etude des paramètres#
En plus de paramètres élastiques classiques \(E\) (module d’Young) et \(\nu\) (coefficient de Poisson), le modèle fait intervenir 6 paramètres supplémentaires:
Code_Aster |
Fonction |
Dimension* |
Identification** |
|
\(\alpha\) |
ALPHA |
Paramètre de couplage |
Sans |
1 |
\({k}_{0}\) |
K0 |
Partie constante du seuil |
\(\mathrm{MPa}\) |
2 |
\({k}_{1}\) |
K1 |
Paramètre du seuil |
\(\mathrm{MPa}\) |
3 |
\({k}_{2}\) |
K2 |
Paramètre du seuil |
Sans |
3 |
\({\gamma}_{B}\) |
ECROB |
Energie bloquée relative à la traction |
\(\mathrm{MJ}/{m}^{3}=\mathrm{MPa}\) |
2 |
\({\gamma}_{d}\) |
ECROD |
Energie bloquée relative à la compression |
\(\mathrm{MJ}/{m}^{3}=\mathrm{MPa}\) |
3 |
On multiplie les paramètres en MégaPascals (\(\mathrm{MPa}\) ) par 106 si on travaille en Pascals (\(\mathrm{Pa}\) ).
** Les paramètres doivent être calibrés dans l’ordre suivant:
on fixe le paramètre \(\alpha\)
identification de \({k}_{0}\) et \({\gamma}_{B}\) sur un essai de traction simple
identification de \({k}_{1}\) , \({k}_{2}\) et \({\gamma}_{d}\) sur un essai de compression simple et un essai biaxial (\({\sigma}_{1}={\text{\beta \sigma }}_{2}\) avec \(\beta =-0,2\) pour vérifier que la contrainte de rupture en traction n’est pas dépassée)
Étudions à présent un peu plus en détail l’influence des différents paramètres sur la réponse du modèle.
Influence du paramètre \(\alpha\)#
Le rôle du paramètre \(\alpha\) est de contrôler le rapport d’influence des deux forces thermodynamiques associées dans le critère d’évolution. Un paramètre \(\alpha\) proche de \(1\) privilégie l’évolution de l’endommagement de traction et un paramètre \(\alpha\) proche de \(0\) privilégie l’évolution de l’endommagement de compression. Nous avons décidé de prendre un paramètre constant pour des raisons de simplicité.
Si on endommage en compression simple dans la direction 1, on crée des fissures dans les plans orthogonaux à \({\overrightarrow{e}}_{2}\) et \({\overrightarrow{e}}_{3}\) . Si l’on fait ensuite une traction dans la direction 2 ou 3, on «voit» ces fissures. Pour obtenir cet effet dans le modèle, il faut qu’une compression génère non seulement un endommagement de compression, mais aussi de traction. Si on commence en revanche par une traction dans la direction 1, les fissures dans le plan perpendiculaire à \({\overrightarrow{e}}_{1}\) seront peu ouvertes (déformation faible à la rupture), donc on peut penser qu’on ne les «verra» pas si l’on fait ensuite une compression dans la direction 2 ou 3. On en conclut qu’il faut prendre \(\alpha \ne 0\) et \(\alpha \ne 1\) pour avoir un couplage, et proche de 1 pour favoriser l’évolution de l’endommagement de traction lors des compressions. Il y aura aussi une petite évolution de l’endommagement de compression lors des tractions, dépourvue de sens physique, mais cela ne sera pas gênant si cet endommagement reste faible.
Essais uniaxiaux#
On se propose ici d’observer l’influence du paramètre \(\alpha\) dans le cas de la traction simple et de la compression simple. Les autres paramètres du modèle sont pris constants pour notre série de tests:
\(E=28800\text{MPa},\nu =0.2,{k}_{0}={3.10}^{-4}\text{MPa},{k}_{1}=10\text{MPa},{k}_{2}={2.10}^{-4},{\gamma}_{B}=0{\text{MJ/m}}^{3,}{\gamma}_{d}=0.06{\text{MJ/m}}^{3}\)
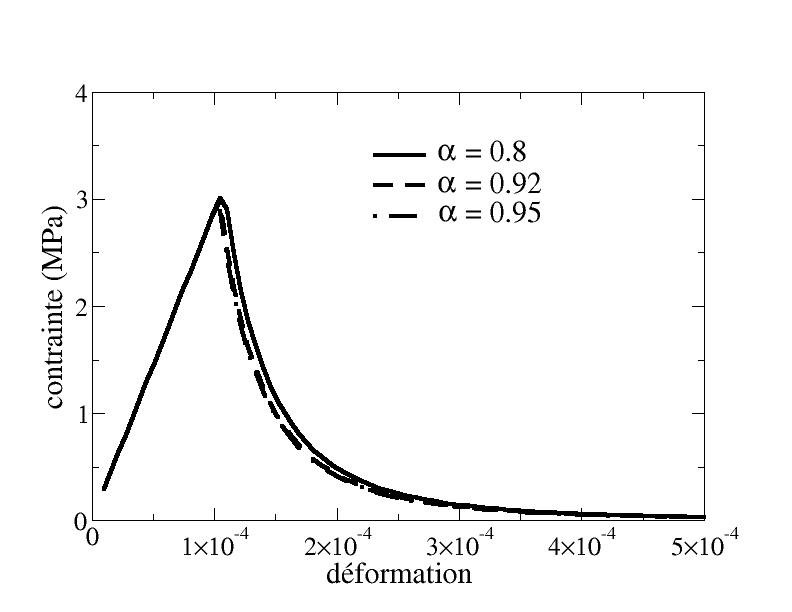
Figure 4 .1.1-a: Influence du paramètre a en traction simple |
Le paramètre \(\alpha\) a une influence relativement faible sur le pic de contrainte en traction pour la gamme de valeurs considérées comme on peut l’observer sur la [Figure 4.1.1-a]. On reste en effet dans le cas où la force thermodynamique associée à l’endommagement de traction est prépondérante dans le critère (ce ne serait pas le cas si l’on prenait \(\alpha\) proche de \(0\) ) |
Pour la compression, on observe une différence importante de pic de contrainte (cf. [Figure 4.1.1-b]). Plus \(\alpha\) est proche de \(1\) , plus la contrainte seuil est élevée. Ce phénomène est accentué quand on prend un seuil dépendant des déformations comme c’est le cas sur la [Figure 4.1.1-b].
Remarque:
Le fait que la contrainte seuil soit plus sensible en compression qu’en traction provient du fait que l’on prend une valeur de \(\alpha\) proche de \(1\) , privilégiant l’endommagement de traction. L’effet serait inversé si l’on prenait \(\alpha\) proche de \(0\) .
Le paramètre \(\alpha\) influe aussi sur la vitesse relative d’évolution de endommagements via la loi de normalité de l’écoulement. Plus \(\alpha\) est proche de \(1\) , plus l’endommagement latéral de traction \({D}_{yy}\) augmente rapidement par rapport à l’endommagement de compression \(d\) comme on le voit sur la [Figure 4.1.1-c].
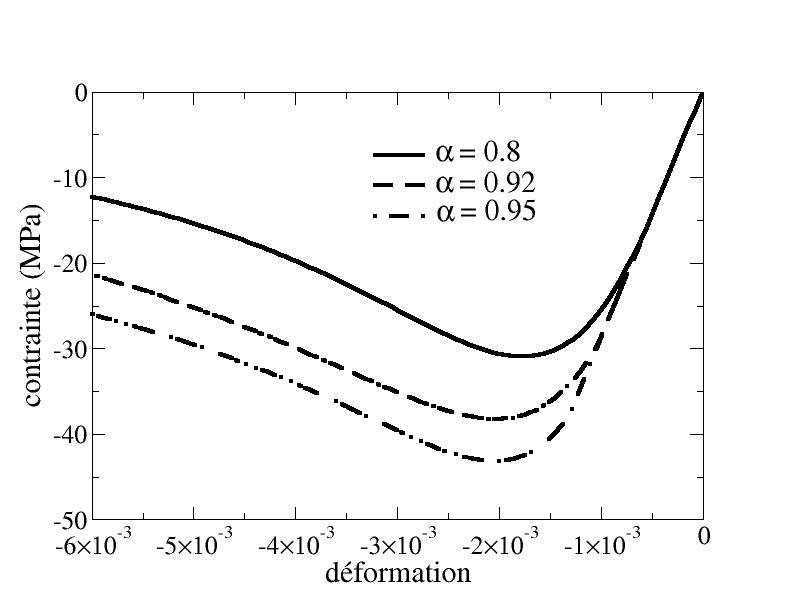
Figure 4.1.1-b: Influence du paramètre \(\alpha\) sur une compression simple
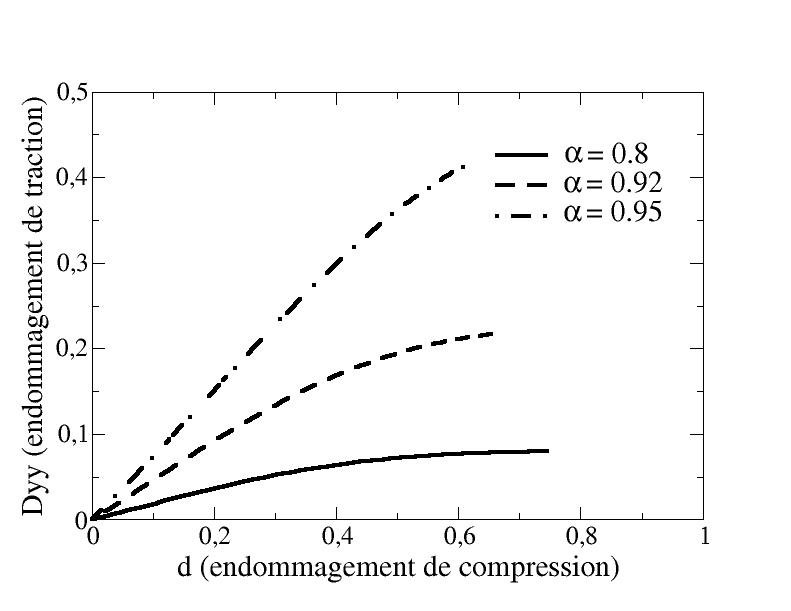
Figure 4.1.1-c: Evolution de l’endommagement de traction par rapport à l’endommagement de compression pour une compression simple
Mise en garde#
Dans un essai de compression simple, des fissures se créent orthogonalement aux directions de déformation positive, et influence le comportement ultérieur en traction. Nous avons introduit le couplage afin de représenter ce phénomène. On voit cependant sur l’essai de compression simple que l’endommagement latéral de traction n’atteint pas la ruine (\({D}_{yy}^{\lim}<1\) ) lorsque l’endommagement de compression \(d\) tend vers \(1\) . Ceci représente une limitation du modèle.
Il est cependant possible d’atteindre la ruine pour une valeur de \(\alpha\) plus proche de \(1\) . L’endommagement de traction va alors évoluer plus vite que l’endommagement de compression (cf.[Figure 4.1.2-a]). Malheureusement la réponse contrainte-déformation fait alors apparaître un snap‑back (cf.[Figure 4.1.2-b]) dépourvu de sens physique, si bien qu’il faut exclure ces valeurs de \(\alpha\) .
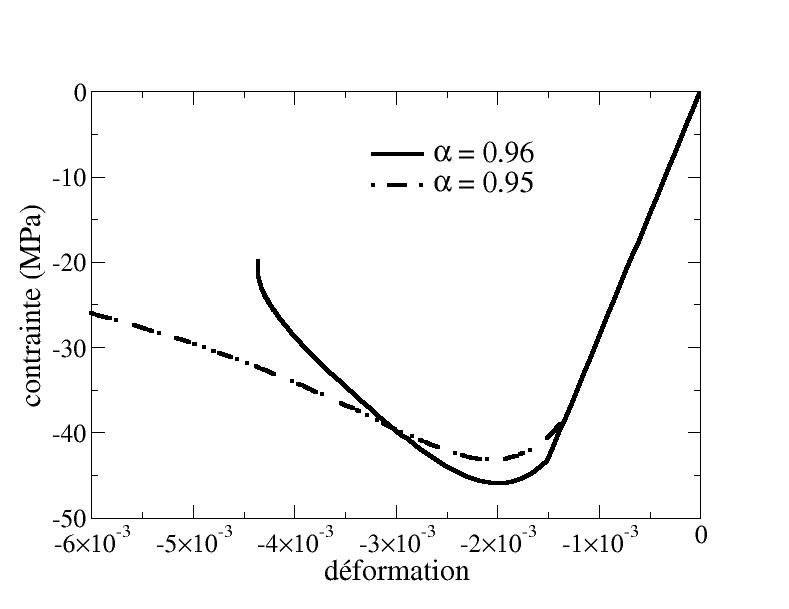
Figure 4.1.2-a: Effet d’un paramètre \(\alpha\) très proche de 1 sur la réponse contrainte-déformation en compression simple
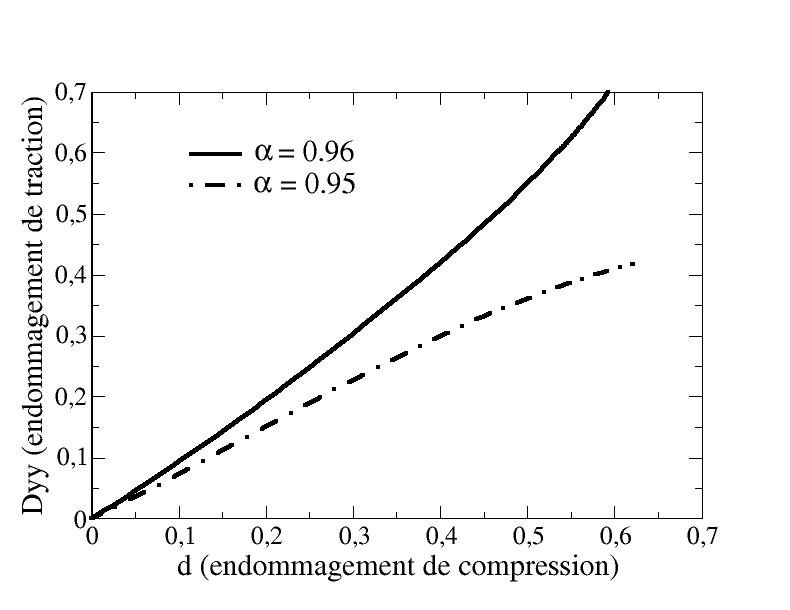
Figure 4.1.2-b: Effet d’un paramètre \(\alpha\) très proche de 1 sur l’évolution relative des endommagements de traction et de compression en compression simple
Identification du paramètre \(\alpha\)#
Il existe une valeur critique de paramètre \(\alpha\) au delà de laquelle on tombe sur les inconvénients énoncés dans la section [§ 4.1.2 ]. Cette valeur critique dépend des autres paramètres mais nous n’avons pas de formule empirique permettant de la trouver. On préférera donc utiliser une valeur de \(\alpha\) autour de \(0,9\) qui fait évoluer l’endommagement de compression plus rapidement que l’endommagement de traction dans l’essai de compression simple, si bien qu’on ne peut alors pas observer la ruine en traction dans les directions perpendiculaires à celle de la compression.
Influence des paramètres \({\gamma}_{B}`et :math:`{\gamma}_{d}\)#
L’introduction d’une énergie bloquée dépendant des variables d’endommagement permet de contrôler la vitesse d’évolution de l’endommagement, et de ce fait permet de contrôler la forme de la courbe contrainte-déformation.
Essai de traction simple#
Dans l’essai de traction simple, seule la partie de l’énergie bloquée relative à l’endommagement de traction a une véritable influence. La courbe contrainte-déformation est représentée sur la [Figure4.2.1-a] pour différentes valeurs de \({\gamma}_{B}\) . On voit que plus \({\gamma}_{B}\) est grand, plus la contrainte de rupture est grande, et plus le pic est large. Ceci est dû au fait que l’énergie bloquée ralentit l’évolution de l’endommagement, comme le montre la [Figure4.2.1-b].
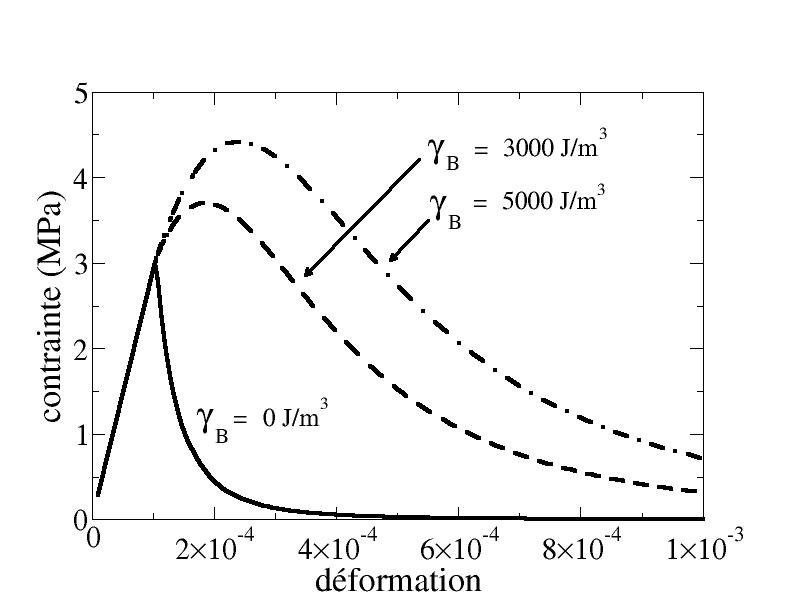
Figure 4.2.1-a: Influence de l’énergie bloquée sur un essai de traction simple
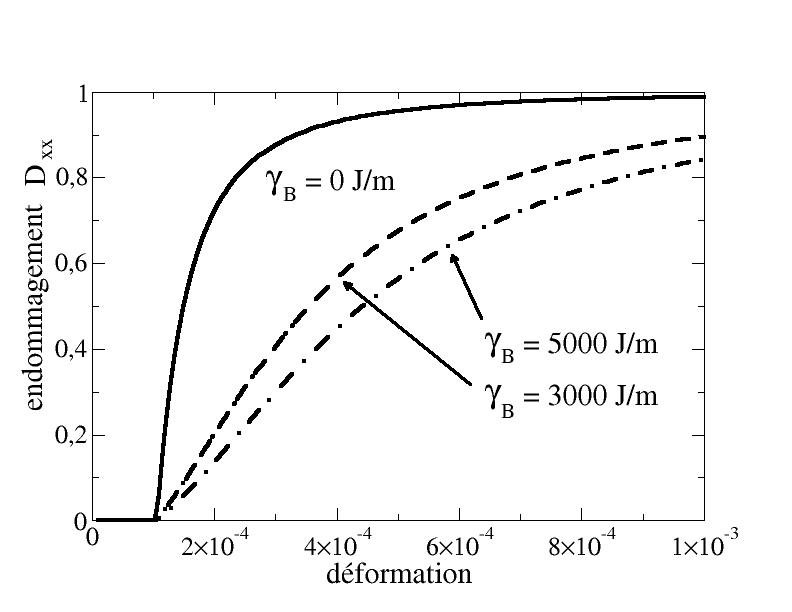
Figure 4.2.1-b: Influence de l’énergie bloquée sur la vitesse d’évolution de l’endommagement
Essai de compression simple#
Dans l’essai de compression simple, seule la partie de l’énergie bloquée relative à l’endommagement de compression a une véritable influence. Le paramètre \({\gamma}_{d}\) est cependant moins facile à calibrer du fait que le seuil du critère dépend de l’état de déformation. Nous allons immédiatement expliquer ce point dans la mise en garde suivante.
Remarque:
Théoriquement, la mise en garde que nous allons exposer est aussi valable en traction. Dans la pratique, nous n’y sommes pas confrontés car on privilégie toujours l’endommagement de traction en prenant un paramètre de couplage \(\alpha\) proche de 1, et on ne prend pas une valeur de \({\gamma}_{d}\) trop grande (le comportement du béton en traction est quasi-fragile).
Mise en garde#
L’introduction de l’énergie bloquée doit permettre de ralentir l’évolution de l’endommagement de compression, et de ce fait doit permettre d’arrondir la forme du pic dans un essai de compression simple. Une mise en garde doit cependant être formulée concernant l’utilisation de cette énergie bloquée. La force thermodynamique qui pilote l’évolution de l’endommagement de compression est la somme de deux termes: l’un correspondant à la dérivation de l’énergie élastique, dépendant de la déformation et de l’endommagement, positif, et l’autre correspondant à la dérivation de l’énergie bloquée, ne dépendant que de l’endommagement, négatif. Or, lorsque l’endommagement augmente, il se peut que le terme correspondant à l’énergie bloquée soit trop grand en valeur absolue par rapport à celui correspondant à l’énergie élastique, ce qui peut empêcher l’évolution de l’endommagement.
\(\begin{array}{ccc}{F}^{d}={F}_{\mathrm{élastique}}^{d}(\varepsilon ,d)+{F}_{\mathrm{bloquée}}^{d}(d)& \text{avec}& \lbrace \begin{array}{}{F}_{\mathrm{élastique}}^{d}(\varepsilon ,d)\ge 0\\ {F}_{\mathrm{bloquée}}^{d}(d)\le 0\end{array}\\ {F}_{\mathrm{élastique}}^{d}(\varepsilon ,d)+{F}_{\mathrm{bloquée}}^{d}(d)\le 0& \Rightarrow & d\text{n'évolue plus}\end{array}\)
Ce problème apparaît lorsqu’on considère un seuil constant dans le critère. La [Figure 4.2.2.1-a] nous montre dans ce cas l’influence de l’introduction de l’énergie bloquée sur la courbe contrainte-déformation dans un essai de compression simple. On observe que l’introduction de cette énergie, en ralentissant l’évolution de l’endommagement de compression, permet bien dans un premier temps d’augmenter la hauteur du pic de contrainte ainsi que la largeur du pic. On remarque cependant qu’apparaît un snap-back sur les deux courbes où l’on a ajouté une énergie bloquée. Ceci est dû au fait que l’on ralentit l’évolution de l’endommagement de compression mais qu’on n’agit pas sur l’endommagement de traction. Ceci est illustré sur la [Figure 4.2.2.1-b], qui montre un stabilisation de l’endommagement de compression conjugué à une augmentation rapide de l’endommagement de traction.
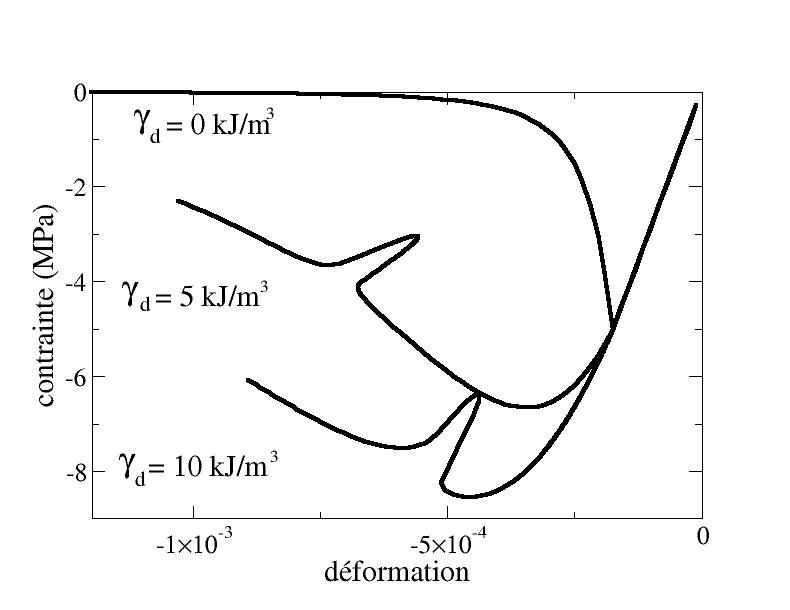
Figure 4.2.2.1-a: Influence de l’énergie bloquée dans un essai de compression simple
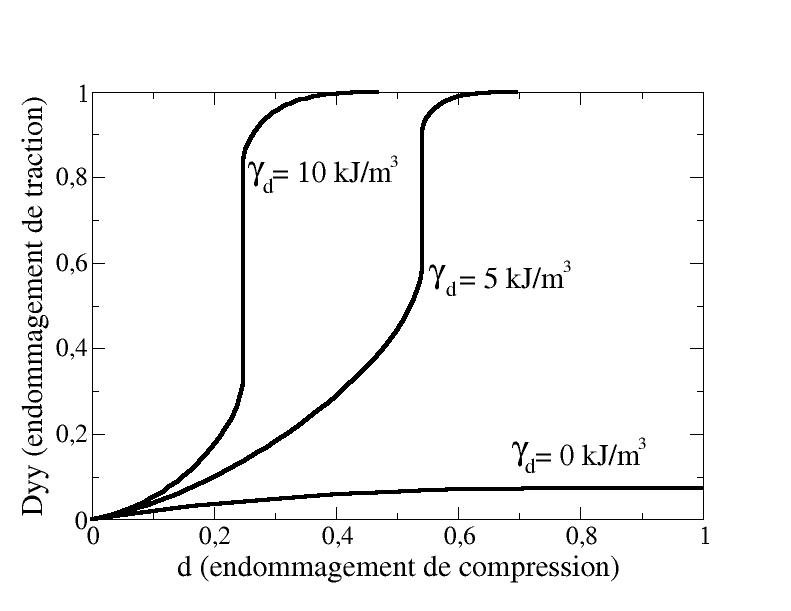
Figure 4.2.2.1-b: Evolution de l’endommagement latéral de traction en fonction de l’endommagement de compression
Combinaison de l’énergie bloquée et du seuil dépendant des déformations#
Lorsqu’on utilise un seuil dépendant de l’état de déformation, la force associée à l’énergie élastique reste plus importante que celle associée à l’énergie bloquée car, pour un même état d’endommagement, le critère est atteint pour des niveaux de déformation plus importants. On voit dans ce cas l’influence de l’introduction d’une énergie bloquée sur la réponse du modèle en compression. Cela permet bien de contrôler la forme du pic (cf. [Figure 4.2.2.2-a]), c’est-à-dire la contrainte de rupture ainsi que la déformation à la rupture. On voit par ailleurs sur la [Figure 4.2.2.2-b] que plus le paramètre associé à l’énergie bloquée est grand, plus l’endommagement latéral de traction évolue par rapport à l’endommagement de compression. Il est cependant évident que si l’on prend un paramètre \({\gamma}_{d}\) trop grand, on retrouve les problèmes énoncés auparavant.
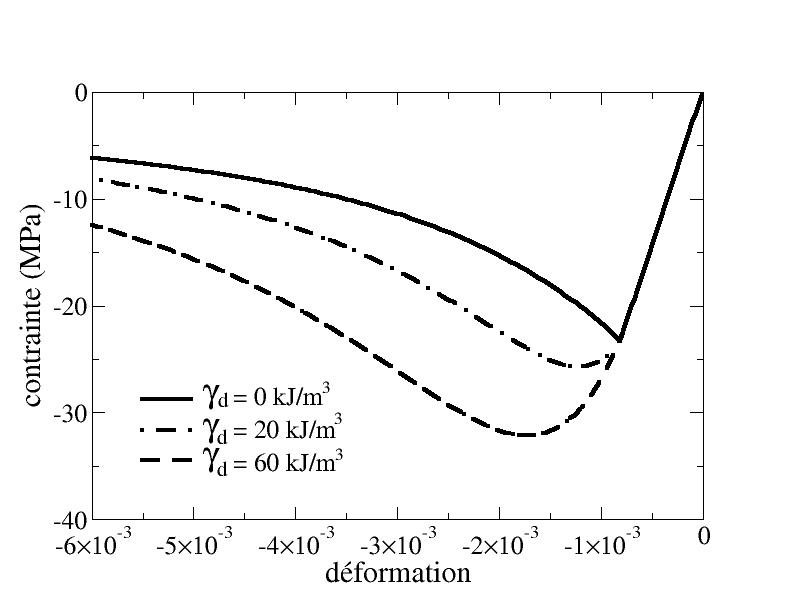
Figure 4 .2.2.2-a: Influence de l’énergie bloquée dans un essai de compression simple
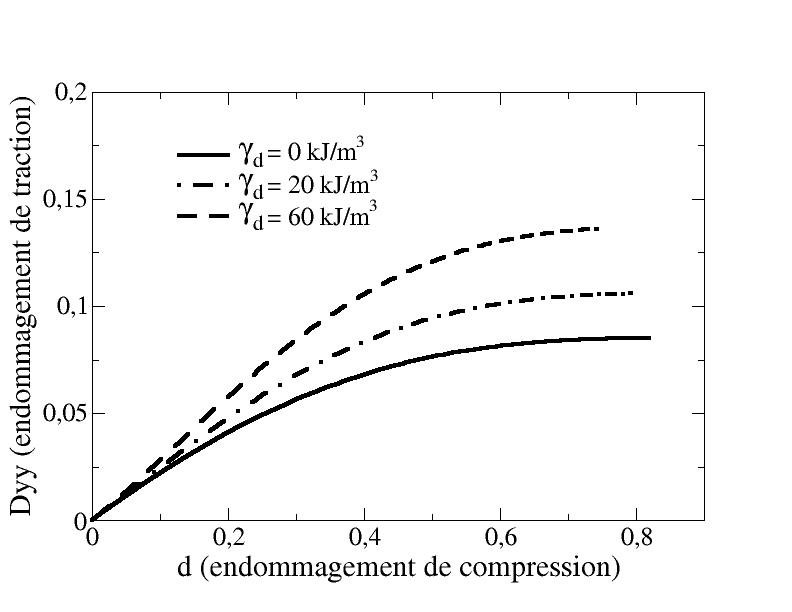
Figure 4 *.2.2.2-b: Evolution de l’endommagement latéral de traction* en fonction de l’endommagement de compression
Identification des paramètres#
Le paramètre \({\gamma}_{B}\) est identifié sur l’essai de traction simple. Il permet de régler la hauteur et la largeur du pic pour cet essai. Il doit être réglé en même temps que le paramètre \({k}_{0}\) du seuil.
Le paramètre \({\gamma}_{d}\) est identifié sur l’essai de compression simple. Il permet de régler la hauteur et la largeur du pic pour cet essai. Il doit être réglé en même temps que les paramètres \({k}_{1}\) et \({k}_{2}\) du seuil.
Influence des paramètres de la fonction seuil#
La fonction seuil que l’on utilise fait intervenir trois paramètres:
\(K(\varepsilon )={k}_{0}-{k}_{1}{(\text{tr}\varepsilon )}_{-}\arctan(-\frac{{(\text{tr}\varepsilon )}_{-}}{{k}_{2}})\) éq 4.3-1
Dans le cas d’une traction simple, seul le paramètre \({k}_{0}\) intervient. Dès lors que la trace des déformations devient négative, comme c’est le cas en compression simple, les trois paramètres interviennent. Le paramètre \({k}_{0}\) doit donc être calibré préalablement sur un essai de traction simple. Les paramètres \({k}_{1}\) et \({k}_{2}\) seront ensuite calibrés sur un essai de compression simple et un essai biaxial, avec \({k}_{0}\) fixé.
Traction simple : influence du paramètre \({k}_{0}\)#
Si l’on prend une énergie bloquée ne dépendant pas de l’endommagement de traction (\({\gamma}_{B}=0\) ), la valeur de la contrainte de rupture est totalement déterminée par la valeur de \({k}_{0}\) , \(\alpha\) , et les paramètres élastiques:
\({\sigma}_{\mathrm{rupture}}^{2}=\frac{{k}_{0}E}{\sqrt{\alpha +2(1-\alpha )\frac{{\nu }^{4}}{{1+\nu }^{2}}}}\) éq 4.3.1-1
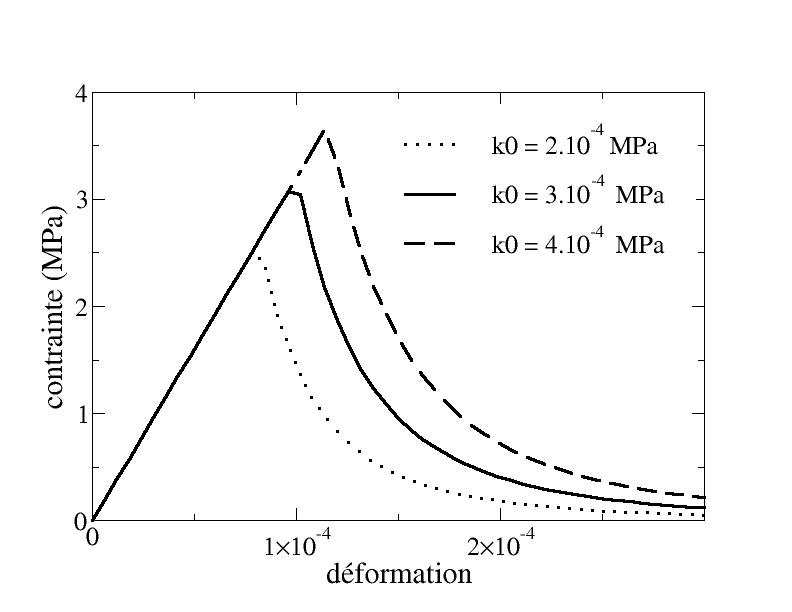
Figure 4.3.1-a: Dépendance de la contrainte de rupture en traction vis-à-vis du paramètre \({k}_{0}\) ( \(E=32000\mathrm{Mpa}\) , \(\nu =0.2\) , \(\alpha =0.87\) )
De manière évidente, plus \({k}_{0}\) est grand, plus la contrainte de rupture en traction est grande comme le montre la [Figure 4.3.1-a].
Il n’existe pas malheureusement d’expression analytique de la contrainte de rupture lorsqu’on \({\gamma}_{B}\ne 0\) . La dépendance de la réponse vis-à-vis du paramètre \({\gamma}_{B}\) est étudiée au paragraphe [§ 4.2.1 ]. Les paramètres \({k}_{0}\) et \({\gamma}_{B}\) doivent être calibrés simultanément.
Compression : influence des paramètres \({k}_{1}`et :math:`{k}_{2}\)#
Le rôle de la fonction seuil, qui dépendant de la trace négative de la déformation, est d’augmenter la limite de rupture en compression, afin de mieux contrôler la dissymétrie du comportement du béton entre la traction et la compression.
De plus, nous avons fait le choix de prendre une fonction seuil permettant de décrire l’enveloppe de rupture du béton dans le cas de chargements biaxiaux. Ce choix a été fait pour deux raisons:
Nous disposons pour ces essais de résultats expérimentaux (cf. [bib5]). Ces essais concernent certes bien sûr seulement les bétons utilisés par [bib5], mais présentent des particularités communes qu’on peut semble-t-il généraliser.
Cela permet d’élargir la gamme d’utilisation du modèle. Les tests uniaxiaux sont en effet insuffisants pour assurer la pertinence du modèle dans le cas de calculs en 3D.
Remarque:
Le modèle ne doit pas être utilisé dans le cas des fortes compressions triaxiales, l’énergie libre et la fonction seuil n’ayant pas été établies pour traiter ce cas. On rappelle que l’objectif principal du modèle est de décrire l’endommagement de traction dans le béton.
Rôle du paramètre \({k}_{1}\)#
Le paramètre \({k}_{1}\) est le paramètre qui permet d’augmenter la limite de rupture en compression. La [Figure 4.3.2.1-a].
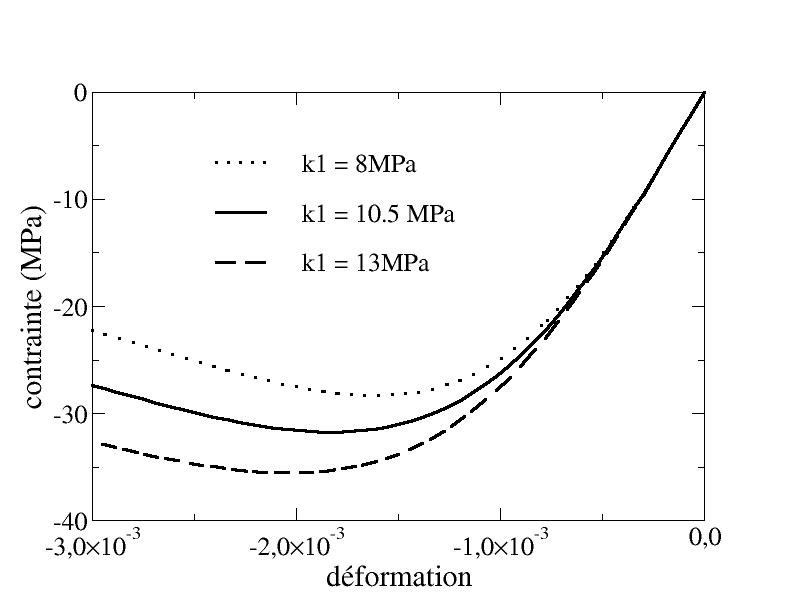
Figure 4.3.2.1-a: Dépendance de la réponse en compression simple vis-à-vis de \({k}_{1}\) ( \(E=32000\mathrm{MPa},\nu =0.2,{k}_{0}={3.10}^{-4}\mathrm{MPa},{k}_{2}={6.10}^{-4},{\gamma}_{d}={6.10}^{-2}\mathrm{MJ}/{m}^{3}\)
Rôle du paramètre \({k}_{2}\)#
Pour comprendre le rôle du paramètre \({k}_{2}\) , revenons sur le cheminement qui nous a amenés à choisir la fonction seuil [éq 3.2-1].
La première fonction seuil ayant été testée est la fonction linéaire:
\(K(\varepsilon )={k}_{0}-{k}_{1}{(\text{tr}\varepsilon )}_{-}\) éq 4.3.2.2-1
Cette fonction permet bien d’augmenter la contrainte de rupture en compression simple, mais elle pose problème lorsqu’on s’intéresse à des essais biaxiaux. La [Figure 4.3.2.2-a] nous montre l’enveloppe du domaine élastique pour des essais biaxiaux.
Remarque:
L’enveloppe du domaine d’élasticité est différente de l’enveloppe de rupture (pour la quelle nous disposons de résultats expérimentaux). Nous étudions l’enveloppe du domaine d’élasticité car elle peut être calculée analytiquement, au contraire de l’enveloppe de rupture, et car c’est à partir de celle-ci que nous avons choisi notre fonction seuil. L’utilisateur devra cependant bien calibrer ses paramètres sur l’enveloppe de rupture.
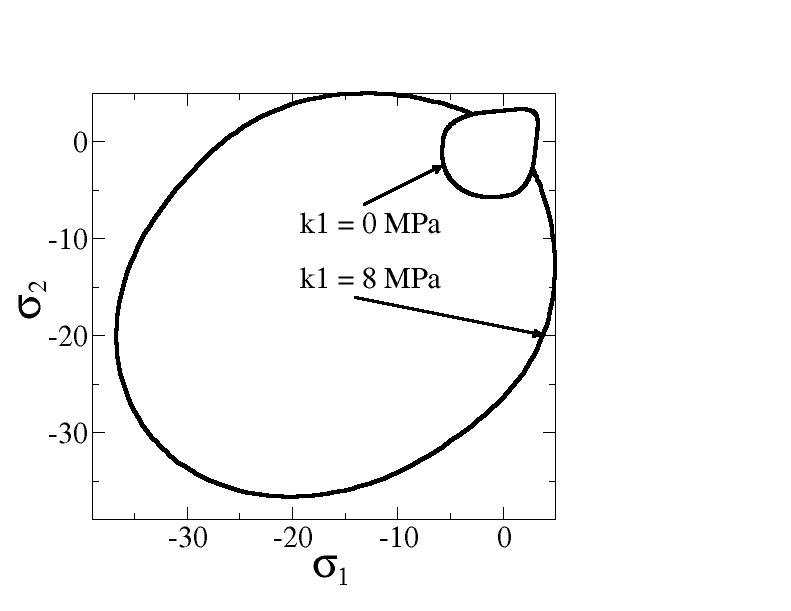
Figure 4.3.2.2-a: Enveloppe du domaine d’élasticité pour des essais biaxiaux avec une fonction seuil linéaire
La variation linéaire du seuil avec la déformation ne semble pas adaptée puisqu’on voit apparaître un gonflement dans la zone \(({\sigma}_{1}>0,{\sigma}_{2}<0)\) qui donne des contraintes limites en traction trop importantes.
Nous avons donc modifié la fonction seuil:
\(K(\varepsilon )={k}_{0}-{k}_{1}{(\text{tr}\varepsilon )}_{-}\arctan(-\frac{{(\text{tr}\varepsilon )}_{-}}{{k}_{2}})\) éq 4.3.2.2-2
Le fait que la fonction arctan présente un palier permet de retrouver un seuil linéaire lorsque la trace des déformations augmente en valeur absolue. Le fait qu’elle soit nulle à l’origine permet de ralentir l’augmentation du seuil près de cette origine.
On peut voir sur la [Figure 4.3.2.2-b] l’effet de l’introduction de la nouvelle fonction seuil par rapport à la fonction linéaire sur le domaine d’élasticité pour une même valeur du paramètre \({k}_{1}\) . Cette nouvelle fonction seuil permet d’éviter le phénomène de gonflement observé avec la fonction linéaire lorsqu’on augmente la valeur du paramètre \({k}_{2}\) (le cas \({k}_{2}=0\) correspond à la fonction linéaire). L’autre effet du paramètre \({k}_{2}\) est de diminuer la contrainte d’initiation de l’endommagement, ce qui implique une diminution de la contrainte de rupture (effet inverse de \({k}_{1}\) ) comme le montre la [Figure 4.3.2.2-c].
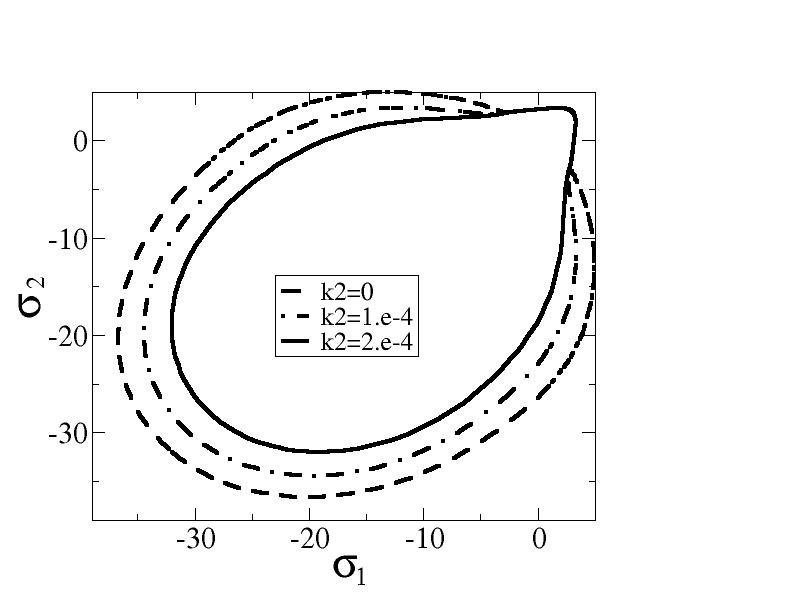
Figure 4.3.2.2-b: Domaine d’élasticité avec la fonction seuil à deux paramètres
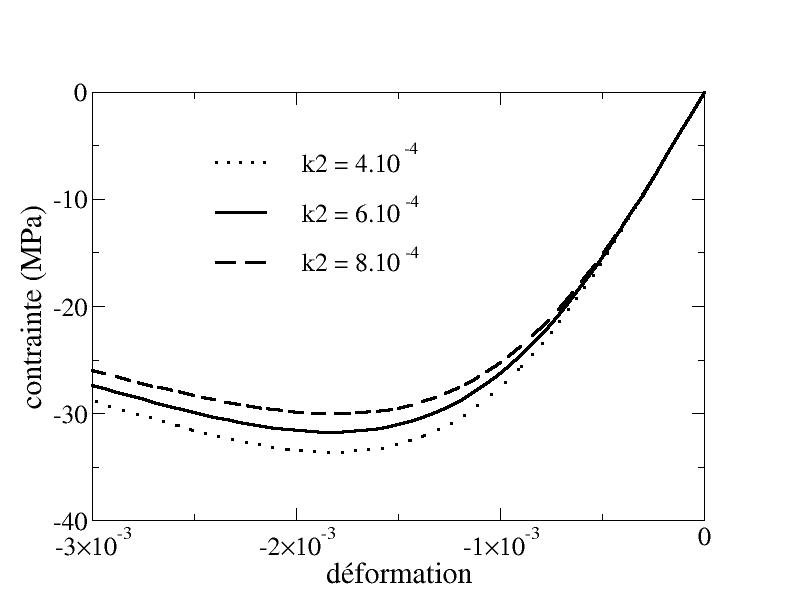
Figure 4.3.2.2-c: Dépendance de la réponse en compression simple vis-à-vis de \({k}_{2}\) ( \(E=32000\text{MPa},\nu =0.2,{k}_{0}={3.10}^{-4}\text{MPa},{k}_{1}=10.5\text{MPa},{\gamma}_{d}={6.10}^{-2}{\text{MJ/m}}^{3}\) )
Identification des paramètres#
Les paramètres \({\gamma}_{d}\) , \({k}_{1}\) et \({k}_{2}\) sont identifiés simultanément. Les paramètres \({k}_{1}\) et \({\gamma}_{d}\) permettent de régler la contrainte de rupture en compression simple et le paramètre permet d’éviter le «gonflement» de l’enveloppe du domaine élastique (et donc de l’enveloppe de rupture) pour les essais biaxiaux. Plus on prend \({k}_{1}\) grand, plus il faut prendre \({k}_{2}\) grand.
Bilan sur l’étude des paramètres#
Malgré la relative simplicité du modèle, et le nombre faible de paramètres à identifier (6), le nombre de données expérimentales dont dispose l’ingénieur est souvent, voire toujours, inférieur au nombre de paramètres à identifier. Ceci implique que le caractère arbitraire du choix de certains paramètres. Voici, en résumé l’ordre dans lequel les paramètres doivent être choisis:
Pour le paramètre \(\alpha\) , une valeur entre \(0,85\) et \(0,9\) est préconisée.
Les paramètres \({k}_{0}\) et \({\gamma}_{B}\) doivent être identifiés simultanément sur un essai de traction simple (pas de formule analytique dans le cas \({\gamma}_{B}\ne 0\) ).
Les paramètres \({\gamma}_{d}\) , \({k}_{1}\) et \({k}_{2}\) doivent être identifiés simultanément. Le plus simple est de fixer le paramètre \({k}_{2}\) à \({6.10}^{-4}\) (valeur pour laquelle il est probable qu’on n’observe pas de gonflement de l’enveloppe de rupture (cf. [§ 4.3.2.2 ]) pour des essais biaxiaux), et de calibrer \({\gamma}_{d}\) et \({k}_{1}\) sur un essai de compression simple. On vérifie ensuite si l’enveloppe de rupture est correcte, on modifie \({k}_{2}\) si besoin et on recommence pour \({\gamma}_{d}\) et \({k}_{1}\) .
Des exemples de jeux de paramètres se trouvent dans la section 6 (validation sur des essais expérimentaux). On trouvera de plus dans le document [V6.04.176], les cas-test permettant d’identifier les paramètres.
Implantation numérique#
Pour l’intégration de la loi de comportement dans Code_Aster , nous nous sommes placés dans le cadre de l’intégration implicite des lois de comportement.
Évaluation de l’endommagement#
On note \({\varepsilon}^{-}\) la déformation et \({B}^{-}\) et \({d}^{-}\) les variables d’endommagement à la fin du pas de temps précédent (après convergence). On souhaite déterminer l’évolution de l’endommagement lorsqu’on applique un incrément de déformation \(\Delta \varepsilon ` . La déformation finale :math:\)varepsilon ={varepsilon}^{-}+Delta varepsilon` est donc fixée.
On évalue le critère d’endommagement:
\(f(\varepsilon ,{B}^{-},{d}^{-})=\sqrt{\alpha {\parallel {F}_{-}^{B}\parallel }^{2}+(1-\alpha ){({F}_{+}^{d})}^{2}}-K(\varepsilon )\) éq 5.1-1
Si \(f\le 0\) , les variables d’endommagement n’évoluent pas et on peut passer à l’itération suivante pour l’équilibre mécanique.
Si \(f>0\) , les variables d’endommagement évoluent, en respectant à la fois le critère et l’écoulement normal. On cherche donc \((\Delta B,\mathrm{\Delta \; d},\mathrm{\Delta \; \gamma })\) solution du système:
\(R(\Delta B,\Delta d,\Delta \gamma )=(\begin{array}{c}-\Delta B+\Delta \gamma \alpha {F}_{-}^{B}({B}^{-}+\Delta B)\\ -\Delta d+\Delta \gamma (1-\alpha ){F}_{+}^{d}({d}^{-}+\Delta d)\\ f(\varepsilon ,{B}^{-}+\Delta B,{d}^{-}+\Delta d)\end{array})=(\begin{array}{c}0\\ 0\\ 0\end{array})\) éq 5.1-2
Ce système est non linéaire et nécessite l’utilisation d’une méthode itérative. Nous avons choisi d’utiliser une méthode de Newton-Raphson. L’indice \(n\) représente les itérations de Newton. Soit \({R}^{n}(\Delta {B}^{n},{\mathrm{\Delta \; d}}^{n},{\mathrm{\Delta \; \gamma }}^{n})\) le résidu du système à l’itération \(n\) , la linéarisation du système s’écrit:
\({R}^{n+1}(\Delta {B}^{n+1},\Delta {d}^{n+1},\Delta {\gamma}^{n+1})={R}^{n}(\Delta {B}^{n},\Delta {d}^{n},\Delta {\gamma}^{n})+{({R}^{n}(\Delta {B}^{n},\Delta {d}^{n},\Delta {\gamma}^{n}))}^{\prime }:(\begin{array}{c}\Delta {B}^{n+1}-\Delta {B}^{n}\\ \Delta {d}^{n+1}-\Delta {d}^{n}\\ \Delta {\gamma}^{n+1}-\Delta {\gamma}^{n}\end{array})\) éq 5.1-3
où \({R}^{n}=(\begin{array}{c}-\Delta {B}^{n}+{\mathrm{\Delta \; \gamma }}^{n}\alpha {F}_{-}^{Bn}\\ -{\mathrm{\Delta \; d}}^{n}+{\mathrm{\Delta \; \gamma }}^{n}(1-\alpha ){F}^{dn}\\ f(\varepsilon ,{B}^{-}+\Delta {B}^{n},{d}^{-}+{\mathrm{\Delta \; d}}^{n})\end{array})\)
et \({R}^{{n}^{\prime }}=\left[\begin{array}{ccc}-I+\alpha \Delta {\gamma}^{n}\frac{\partial {F}_{-}^{B}}{\partial {F}^{B}}:\frac{\partial {F}^{B}}{\partial B}& 0& \alpha {F}_{-}^{B}\\ 0& -1+(1-\alpha )\Delta {\gamma}^{n}\frac{\partial {F}_{+}^{d}}{\partial {F}^{d}}\frac{\partial {F}^{d}}{\partial d}& (1-\alpha ){F}_{+}^{d}\\ \frac{\alpha {F}_{-}^{B}}{\sqrt{\alpha {\parallel {F}_{-}^{B}\parallel }^{2}+(1-\alpha ){\mid {F}_{+}^{d}\mid }^{2}}}:\frac{\partial {F}^{B}}{\partial B}& \frac{(1-\alpha ){F}_{+}^{d}}{\sqrt{\alpha {\parallel {F}_{-}^{B}\parallel }^{2}+(1-\alpha ){\mid {F}_{+}^{d}\mid }^{2}}}\frac{\partial {F}^{d}}{\partial d}& 0\end{array}\right]\) .
On résout ensuite le système linéarisé \({R}^{n+1}(\Delta {B}^{n+1},\Delta {d}^{n+1},\Delta {\gamma}^{n+1})=0\) . On obtient \((\Delta {B}^{n+1},\Delta {d}^{n+1},\Delta {\gamma}^{n+1})\) . Cette procédure est réitérée jusqu’à ce que le résidu soit inférieur à un paramètre de convergence.
Calcul de la matrice tangente#
La matrice tangente est le tenseur \(M\) d’ordre 4 défini par:
\(\delta {\sigma}_{ij}={M}_{ijkl}\delta {\varepsilon}_{kl}\iff {M}_{ijkl}=\frac{\partial {\sigma}_{ij}}{\partial \Delta {\varepsilon}_{kl}}\) éq 5.2-1
Cette matrice n’est pas calculée sur le problème continu mais sur le problème incrémental. On cherche donc les effets d’une variation de l’incrément de déformation entre deux pas de temps successifs sur la variation de contrainte finale, compte tenu du fait que les variables internes peuvent aussi évoluer. On a au premier ordre:
\({\text{\delta \sigma }}_{ij}(\varepsilon ,B,d)=\frac{\partial {\sigma}_{ij}}{\partial {\mathrm{\Delta \; \varepsilon }}_{kl}}{\mid}_{B,d}{\mathrm{\delta \; \Delta \; \varepsilon }}_{kl}+\frac{\partial {\sigma}_{ij}}{\partial {\mathrm{\Delta \; B}}_{kl}}{\mid}_{\varepsilon ,d}{\mathrm{\delta \; \Delta \; B}}_{kl}+\frac{\partial {\sigma}_{ij}}{\partial \mathrm{\Delta \; d}}{\mid}_{\varepsilon ,B}\mathrm{\delta \; \Delta \; d}\) éq 5.2-2
soit:
\({\text{\delta \sigma }}_{ij}(\varepsilon ,B,d)=\left[\frac{\partial {\sigma}_{ij}}{\partial {\mathrm{\Delta \; \varepsilon }}_{kl}}{\mid}_{B,d}+\frac{\partial {\sigma}_{ij}}{\partial {\mathrm{\Delta \; B}}_{\text{mn}}}{\mid}_{\varepsilon ,d}\frac{\partial {\mathrm{\Delta \; B}}_{\text{mn}}}{\partial {\mathrm{\Delta \; \varepsilon }}_{kl}}+\frac{\partial {\sigma}_{ij}}{\partial \mathrm{\Delta \; d}}{\mid}_{\varepsilon ,B}\frac{\partial \mathrm{\Delta \; d}}{\partial {\mathrm{\Delta \; \varepsilon }}_{kl}}\right]{\mathrm{\delta \; \Delta \; \varepsilon }}_{kl}\) éq 5.2-3
La notation \(\frac{\partial A}{\partial B}{\mid}_{C,D}\) employée ici signifie qu’on dérive \(A\) par rapport à \(B\) pour \(C\) et \(D\) constants.
On décompose ainsi la matrice tangente en deux parties, l’une à endommagement constant, et l’autre traduisant l’évolution des variables internes:
\(M={M}^{\text{cst}}+{M}^{\text{evol}}\) éq 5.2-4
avec \({M}_{ijkl}^{\text{cst}}=\frac{\partial {\sigma}_{ij}}{\partial {\mathrm{\Delta \; \varepsilon }}_{kl}}{\mid}_{B,d}\) et \({M}_{ijkl}^{\text{evol}}=\frac{\partial {\sigma}_{ij}}{\partial {\mathrm{\Delta \; B}}_{\text{mn}}}{\mid}_{\varepsilon ,d}\frac{\partial {\mathrm{\Delta \; B}}_{\text{mn}}}{\partial {\mathrm{\Delta \; \varepsilon }}_{kl}}+\frac{\partial {\sigma}_{ij}}{\partial \mathrm{\Delta \; d}}{\mid}_{\varepsilon ,B}\frac{\partial \mathrm{\Delta \; d}}{\partial {\mathrm{\Delta \; \varepsilon }}_{kl}}\)
Terme à endommagement constant#
La matrice \({M}^{\text{cst}}\) est la dérivée de la contrainte par rapport à la déformation à endommagement constant:
\(\begin{array}{}{M}_{ijkl}^{\text{cst}}=\mathrm{\lambda \; H}(\text{tr}\text{B \varepsilon }){B}_{ij}{B}_{kl}+\mathrm{\lambda \; f}(d)H(-\text{tr}\varepsilon ){\delta}_{ij}{\delta}_{kl}\\ +\frac{\mu}{4}\frac{\partial {A}_{+\text{ip}}}{\partial {A}_{\text{mn}}}({B}_{\text{mk}}{\delta}_{\text{nl}}+{\delta}_{\text{mk}}{B}_{\text{nl}}+{B}_{\text{ml}}{\delta}_{\text{nk}}+{\delta}_{\text{ml}}{B}_{\text{nk}}){B}_{\text{pj}}\\ +\frac{\mu}{4}{B}_{\text{ip}}\frac{\partial {A}_{+\text{pj}}}{\partial {A}_{\text{mn}}}({B}_{\text{mk}}{\delta}_{\text{nl}}+{\delta}_{\text{mk}}{B}_{\text{nl}}+{B}_{\text{ml}}{\delta}_{\text{nk}}+{\delta}_{\text{ml}}{B}_{\text{nk}})\\ +\mathrm{2\; \mu \; f}(d)\frac{\partial {\varepsilon}_{-ij}}{\partial {\varepsilon}_{kl}}\end{array}\) éq 5.2.1-1
où \(A=\mathrm{B\; \varepsilon }+\mathrm{\varepsilon \; B}\) , \(H\) est la fonction de Heaviside et les dérivées \(\frac{\partial {\varepsilon}_{-}}{\partial \varepsilon }\) et \(\frac{\partial {A}_{+}}{\partial A}\) sont définies en annexe 1.
Terme lié à l’évolution de l’endommagement#
La matrice \({M}^{\text{evol}}\) se calcule en différentiant le critère et la loi de normalité. Cette dérivation se fait sur le problème incrémental et non sur le problème continu.
On différentie tout d’abord le critère:
\(f({F}^{B},{F}^{d})=\sqrt{\alpha {\parallel {F}_{-}^{B}\parallel }^{2}+(1-\alpha ){({F}_{+}^{d})}^{2}}-K(\varepsilon )\le 0\underset{\text{diff}}{\Rightarrow }\frac{\alpha {F}_{-}^{B}:\delta {F}^{B}+(1-\alpha ){F}_{+}^{d}{\mathrm{\delta \; F}}^{d}}{\sqrt{\alpha {\parallel {F}_{-}^{B}\parallel }^{2}+(1-\alpha ){({F}_{+}^{d})}^{2}}}-\mathrm{\delta \; K}=0\) éq 5.2.2-1
On différentie ensuite la loi d’écoulement du problème incrémental, discrétisée de manière implicite :
\(\begin{array}{}\begin{array}{}\Delta B=\Delta \gamma \alpha {F}_{-}^{B}\\ \Delta d=\Delta \gamma (1-\alpha ){F}_{+}^{d}\end{array}\rbrace \Rightarrow (1-\alpha ){F}_{+}^{d}\Delta B=\alpha {F}_{-}^{B}\Delta d\\ \\ \underset{\text{diff}}{\Rightarrow }(1-\alpha )\delta {F}_{+}^{d}\Delta B+(1-\alpha ){F}_{+}^{d}\delta \Delta B=\alpha \delta {F}_{-}^{B}\Delta d+\alpha {F}_{-}^{B}\delta \Delta d\end{array}\) éq 5.2.2-2
On cherche la relation entre \(\delta \Deltab\) , \(\delta \Deltad\) et \(\delta \Delta \varepsilon\) . On peut exprimer les variations des forces thermodynamiques en fonction des variations des déformations et des variables d’endommagement:
\(\begin{array}{}\delta {F}_{-}^{B}=\frac{\partial {F}_{-}^{B}}{\partial {F}^{B}}:\left[\frac{\partial {F}^{B}}{\partial \Delta \varepsilon }:\delta \Delta \varepsilon +\frac{\partial {F}^{B}}{\partial \Delta B}:\delta \Delta B\right]\\ \delta {F}^{d}=\frac{\partial {F}_{+}^{d}}{\partial {F}^{d}}\left[\frac{\partial {F}^{d}}{\partial \Delta \varepsilon }:\delta \Delta \varepsilon +\frac{\partial {F}^{d}}{\partial \Delta d}\delta \Delta d\right]\end{array}\) éq 5.2.2-3
Le système d’équations défini par [éq 5.2.2-1], [éq 5.2.2-2] et [éq 5.2.2-3] aboutit aux expressions suivantes:
\(\begin{array}{ccc}\delta \Delta \text{B}& =& {\chi }^{-1}:\xi :\delta \Delta \varepsilon \\ \delta \Delta d& =& -\left[\frac{\tau}{\rho}+\frac{\theta}{\rho}:{\chi }^{-1}:\xi \right]:\delta \Delta \varepsilon \end{array}\) éq 5.2.2-4
avec
\({\mathrm{\khi }}_{ijkl}={\left[\frac{\partial {F}_{+}^{d}}{\partial {F}^{d}}\frac{\mathrm{\Delta \; B}}{{F}_{+}^{d}}-\frac{{\mathrm{\alpha \; F}}_{-}^{B}}{(1-\alpha ){F}^{d}\frac{\partial {F}^{d}}{\partial d}}\right]}_{ij}{\left[{\mathrm{\alpha \; F}}_{-}^{B}:\frac{\partial {F}_{-}^{B}}{\partial {F}^{B}}:\frac{\partial {F}^{B}}{\partial B}\right]}_{kl}+\mathrm{\alpha \; \Delta \; d}{\left[\frac{\partial {F}_{-}^{B}}{\partial {F}^{B}}:\frac{\partial {F}^{B}}{\partial B}\right]}_{ijkl}-\frac{1}{2}(1-\alpha ){F}_{+}^{d}({\delta}_{\text{ik}}{\delta}_{\text{jl}}+{\delta}_{\text{il}}{\delta}_{\text{jk}})\)
\(\begin{array}{}{\xi}_{ijkl}={\left[\frac{{\mathrm{\alpha \; F}}_{-}^{B}}{(1-\alpha ){F}^{d}\frac{\partial {F}^{d}}{\partial d}}-\frac{\partial {F}_{+}^{d}}{\partial {F}^{d}}\frac{\mathrm{\Delta \; B}}{{F}_{+}^{d}}\right]}_{ij}{\left[{\mathrm{\alpha \; F}}_{-}^{B}:\frac{\partial {F}_{-}^{B}}{\partial {F}^{B}}:\frac{\partial {F}^{B}}{\partial \varepsilon }+(1-\alpha ){F}_{+}^{d}\frac{\partial {F}^{d}}{\partial \varepsilon }-\sqrt{\alpha {\parallel {F}_{-}^{B}\parallel }^{2}+(1-\alpha ){({F}_{+}^{d})}^{2}}\frac{\partial K}{\partial \varepsilon }\right]}_{kl}\\ +(1-\alpha )\frac{\partial {F}_{+}^{d}}{\partial {F}^{d}}{\mathrm{\Delta \; B}}_{ij}\frac{\partial {F}^{d}}{\partial {\varepsilon}_{kl}}-\mathrm{\alpha \; \Delta \; d}{\left[\frac{\partial {F}_{-}^{B}}{\partial {F}^{B}}:\frac{\partial {F}^{B}}{\partial \varepsilon }\right]}_{ijkl}\end{array}\)
\({\tau}_{ij}={\left[{\mathrm{\alpha \; F}}_{-}^{B}:\frac{\partial {F}_{-}^{B}}{\partial {F}^{B}}:\frac{\partial {F}^{B}}{\partial \varepsilon }+(1-\alpha ){F}_{+}^{d}\frac{\partial {F}^{d}}{\partial \varepsilon }-\sqrt{\alpha {\parallel {F}_{-}^{B}\parallel }^{2}+(1-\alpha ){({F}_{+}^{d})}^{2}}\frac{\partial K}{\partial \varepsilon }\right]}_{ij}\)
\({\theta}_{ij}={\left[{\mathrm{\alpha \; F}}_{-}^{B}:\frac{\partial {F}_{-}^{B}}{\partial {F}^{B}}:\frac{\partial {F}^{B}}{\partial B}\right]}_{ij}\)
\(\rho =(1-\alpha ){F}_{+}^{d}\frac{\partial {F}^{d}}{\partial d}\)
\({\chi }^{-1}\) tel que \({\chi }_{ijkl}^{-1}{\chi }_{\text{klmn}}=\frac{1}{2}({\delta}_{\text{im}}{\delta}_{\text{jn}}+{\delta}_{in}{\delta}_{\text{jm}})\)
On obtient donc les expressions de \(\frac{\partial \Delta B}{\partial \Delta \varepsilon }\) et de \(\frac{\partial \Delta d}{\partial \Delta \varepsilon }\) .
De plus, d’après la définition de la contrainte et des forces thermodynamiques, qui dérivent d’une même énergie, on a:
\(\frac{\partial \sigma }{\partial \mathrm{\Delta \; B}}{\mid}_{\varepsilon ,d}=\frac{\partial {F}^{B}}{\partial \varepsilon }{\mid}_{B}\) et \(\frac{\partial \sigma }{\partial \mathrm{\Delta \; d}}{\mid}_{\varepsilon ,B}=\frac{\partial {F}^{d}}{\partial \varepsilon }{\mid}_{d}\) éq 5.2.2-5
ce qui nous permet de calculer la partie de la matrice tangente relative à l’évolution de l’endommagement:
\({M}_{ijkl}^{\text{evol}}=\frac{\partial {\sigma}_{ij}}{\partial {\mathrm{\Delta \; B}}_{\text{mn}}}{\mid}_{\varepsilon ,d}\frac{\partial {\mathrm{\Delta \; B}}_{\text{mn}}}{\partial {\mathrm{\Delta \; \varepsilon }}_{kl}}+\frac{\partial {\sigma}_{ij}}{\partial \mathrm{\Delta \; d}}{\mid}_{\varepsilon ,B}\frac{\partial \mathrm{\Delta \; d}}{\partial {\mathrm{\Delta \; \varepsilon }}_{kl}}\) éq 5.2.2-6
Remarque:
Il est à noter que la matrice tangente n’est pas symétrique. Ceci est dû au fait que le seuil d’endommagement dépend de la déformation. Dans le cas d’un seuil constant, la matrice est bien symétrique, puisque le modèle est alors bien standard généralisé et on utilise un schéma d’intégration implicite.
Validation#
La première étape de la validation du modèle est la comparaison de la prédiction avec différents résultats expérimentaux pour des tests simples. Compte tenu des hypothèses simplificatrices qui ont été faites pour notre modélisation, nous ne pourrons bien entendu pas reproduire toutes les expériences, notamment les expériences de compression triaxiale. On se concentre ici sur les essais de traction simple, de compression simple, ainsi que sur des essais biaxiaux.
Identification des paramètres#
L’identification des paramètres doit se faire en trois phases successives:
On doit choisir une valeur pour la constante de couplage \(\alpha\) . Elle doit être prise de telle sorte que l’endommagement scalaire de compression reste négligeable dans un essai de traction. On décide de la prendre égale à \(0,87\) pour tous les tests de la présente section afin d’éviter le phénomène de snap-back en compression (cf. [§ 4.1.2 ]).
La seconde phase est l’identification des paramètres \({k}_{0}\) et \({\gamma}_{B}\) . Ces paramètres peuvent être identifiés directement sur l’essai de traction simple car les autres paramètres du modèle n’interviennent pas dans cet essai.
La troisième phase est l’identification des paramètres \({\gamma}_{d}\) , \({k}_{1}\) et \({k}_{2}\) sur les essais de compression simple et les tests biaxiaux.
En toute rigueur, l’identification des paramètres de notre modèle pour un matériau nécessite de disposer des courbes expérimentales en traction simple, en compression simple et sous chargement biaxial. Malheureusement, tous ces résultats ne sont généralement pas disponibles simultanément pour un matériau. Nous devrons donc faire un certain nombre d’hypothèses pour calibrer nos paramètres. Par exemple, nous choisirons le paramètre \({k}_{2}\) pour tous les essais de telle manière que les contraintes de traction dans les essais biaxiaux ne dépassent pas la contrainte de rupture en traction. De plus, nous ne disposons pas pour les essais de compression de la contrainte de rupture en traction pour les matériaux étudiés. Nous prendrons donc de manière arbitraire des paramètres \({k}_{0}\) et \({\gamma}_{B}\) égaux à ceux que nous avons calculés pour l’essai de traction simple.
Traction simple#
Les expériences visant à observer le comportement du béton sous chargement de traction sont extrêmement difficiles à réaliser, ce qui explique le relativement faible nombre de résultats de tests en traction simple. La difficulté réside dans le fait que l’endommagement se concentre dans des bandes de localisation correspondant à des fissures, ce qui a pour effet de rendre inhomogène le spécimen étudié. Dès lors que de fortes hétérogénéités apparaissent, il devient impossible de déduire une courbe contrainte-déformation à partir de la courbe force-déplacement, et donc d’établir une loi de comportement pour le matériau. L’appareil de mesure PIED ([bib6], [bib7]) permet de mesurer un champ de contrainte et de déformation relativement homogène en limitant la localisation. C’est pourquoi nous utilisons les résultats obtenus par [bib6] pour tester notre modèle.
Dans le cas de la traction simple, seuls 3 des 6 paramètres du modèle vont jouer un rôle:
Le paramètre de couplage \(\alpha\) .
La constante de seuil \({k}_{0}\) .
La constante d’énergie bloquée associée à l’endommagement de traction \({\gamma}_{B}\) .
Les paramètres \({k}_{1}\) et \({k}_{2}\) n’ont aucune influence sur cet essai et l’influence du paramètre \({\gamma}_{d}\) est négligeable.
Le paramètre \({k}_{0}\) régit la hauteur du pic de contrainte et le paramètre \({\gamma}_{B}\) contrôle sa largeur ainsi que la pente post-pic. Plus \({\gamma}_{B}\) est grand, moins l’endommagement évolue rapidement, ce qui fait apparaître la non-linéarité avant le pic et augmente la déformation au pic et sa largeur. La [Figure 6.2-a] montre la réponse du modèle, comparées aux données expérimentales de [bib6]. Le calcul est effectué sur un seul élément pour ne pas rencontrer de phénomène de localisation. Les paramètres sont les suivants:
\(\alpha\) |
\({k}_{0}\) (\(\mathit{Mpa}\) ) |
\({\gamma}_{B}\) ( \(\mathit{kJ}/{m}^{3}\) ) |
0.87 |
3.10-4 |
7 |
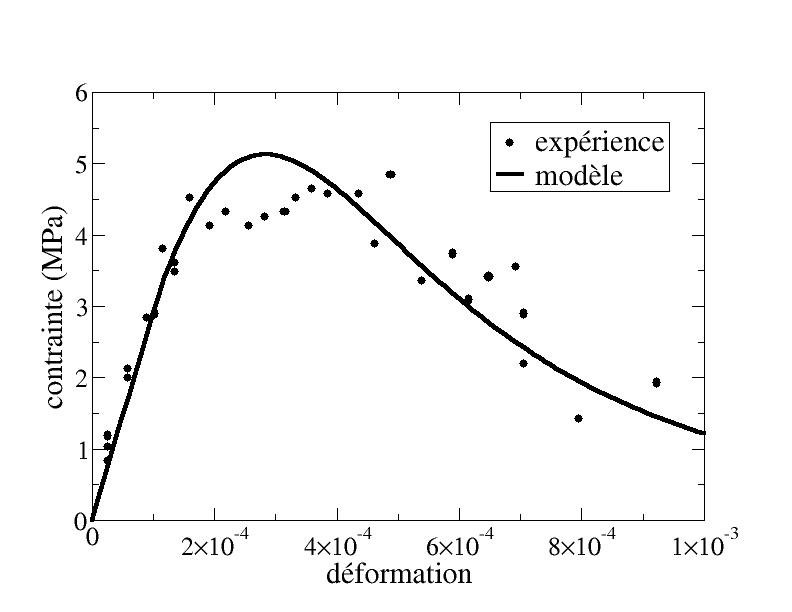
Figure 6.2-a: Essai de traction simple, comparaison avec les données expérimentales de Bazant et Pijaudier-Cabot [1989]
Compression simple#
Le fait que les données expérimentales soient plus nombreuses que pour les essais de traction tient au fait qu’elles sont plus faciles à réaliser. Le phénomène de localisation y est beaucoup moins important que pour un chargement de traction, du moins lorsque l’endommagement reste relativement faible. On utilise les résultats de Hognestad et al. [bib8] et l’essai de Ramtani [bib9] pour valider notre modèle sur des essais de compression simple. Malgré le fait que les résultats de [bib8] sont relativement anciens, nous les utilisons car l’expérience a été menée pour plusieurs bétons différents. Nous utilisons aussi les résultats de [bib9] pour montrer que le modèle reste valable pour des expériences plus récentes.
Comme nous l’avons dit au paragraphe [§ 6.1 ], nous ne disposons pas de la contrainte de rupture en traction pour ces différents essais, c’est pourquoi nous utilisons les mêmes paramètres que ceux obtenus dans le paragraphe [§ 6.2 ]: \(\alpha =0,87,{k}_{0}={3.10}^{-4}\mathrm{MPa},{\gamma}_{B}=7\mathrm{kJ}/{m}^{\rbrace\) .
Hognestad et al. [1955]#
La [Figure 6.3.1-a] nous montre la comparaison entre les résultats expérimentaux de [bib8] et la prédiction de notre modèle dans le cas de trois matériaux dont la contrainte maximale en valeur absolue est notée \({f}_{c}\) :
Nous avons utilisé les paramètres suivants:
Contrainte ultime \({f}_{c}\) |
\(20.7\mathrm{MPa}\) |
\(32.1\mathrm{MPa}\) |
\(42.8\mathrm{MPa}\) |
\(E\) |
17000 |
27000 |
36000 |
\(\nu\) |
0.2 |
0.2 |
0.2 |
\({\gamma}_{d}\) (\(\mathrm{kJ}/{m}^{3}\) ) |
60 |
60 |
60 |
\({k}_{1}\) (\(\mathrm{MPa}\) ) |
4.8 |
18 |
|
\({k}_{2}\) |
7.10-4 |
7.10-4 |
7.10-4 |
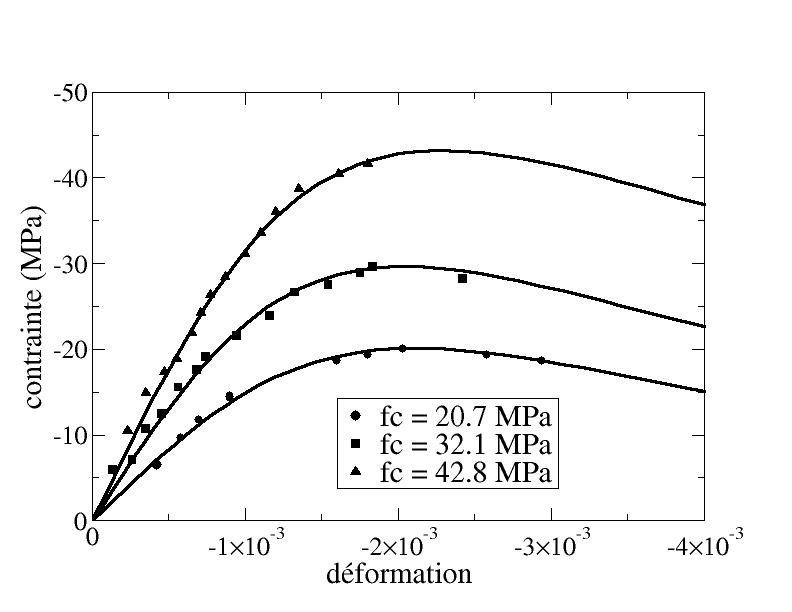
Figure 6 .3.1-a: Essais de compression simple de Hognestad et al. [1955]
Ramtani [1990]#
L’essai de [bib9] est un essai de compression cyclique. Il met en évidence la création de déformations irréversibles et le phénomène d’hystérésis. Nous ne décrivons pas ces phénomènes. Nous nous contentons donc pour notre part de calculer la réponse sous chargement monotone. Les paramètres utilisés sont les suivants:
\(E\) |
\(\nu\) |
\({\gamma}_{d}\) (\(\mathit{kJ}/{m}^{3}\) ) |
\({k}_{1}\) (\(\mathrm{MPa}\) ) |
\({k}_{2}\) |
33700 |
0.2 |
60 |
20.5 |
7.10-4 |
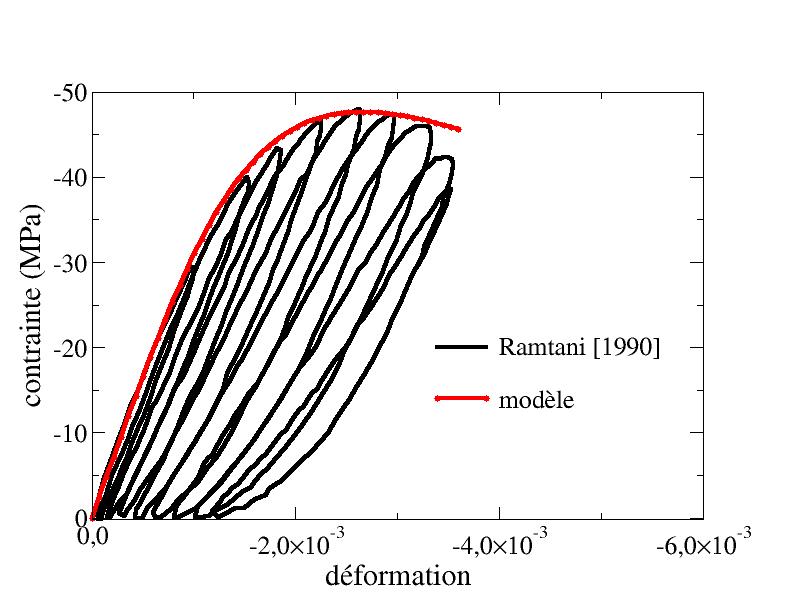
Figure 6 .3.2-a: Essais de compression simple de Ramtani [1990]
Traction simple suivie d’une compression simple#
On propose ici de comparer notre modèle aux résultats expérimentaux de [bib9] sur un essai de traction simple suivi d’une compression simple, afin de mettre en évidence la restauration de la rigidité engendrée par la refermeture des fissures.
Les paramètres utilisés sont les suivants:
\(E\) |
\(\nu\) |
\(\alpha\) |
\({k}_{0}\) (\(\mathrm{MPa}\) ) |
\({\gamma}_{B}\) (\(\mathit{kJ}/{m}^{3}\) ) |
\({\gamma}_{d}\) (\(\mathit{kJ}/{m}^{3}\) ) |
\({k}_{1}\) (\(\mathrm{MPa}\) ) |
\({k}_{2}\) |
16400 |
0.2 |
0.87 |
|
0.3 |
40 |
5.5 |
6.10-4 |
Les résultats expérimentaux montrent l’apparition de déformations irréversibles dans la phase de traction simple (cf. [Figure 6.4-a]). Ces déformations irréversibles ne sont pas décrites par notre modèle, c’est pourquoi la perte de rigidité engendrée par l’endommagement semble surestimée. Ce problème ne semble pas avoir d’incidence lorsque les fissures se ferment. On observe en effet sur la [Figure 6.4-b] une bonne correspondance du modèle avec les résultats expérimentaux dans la phase de compression. Il semble ainsi que la restauration de la rigidité obtenue grâce au modèle soit très proche de celle obtenue expérimentalement.
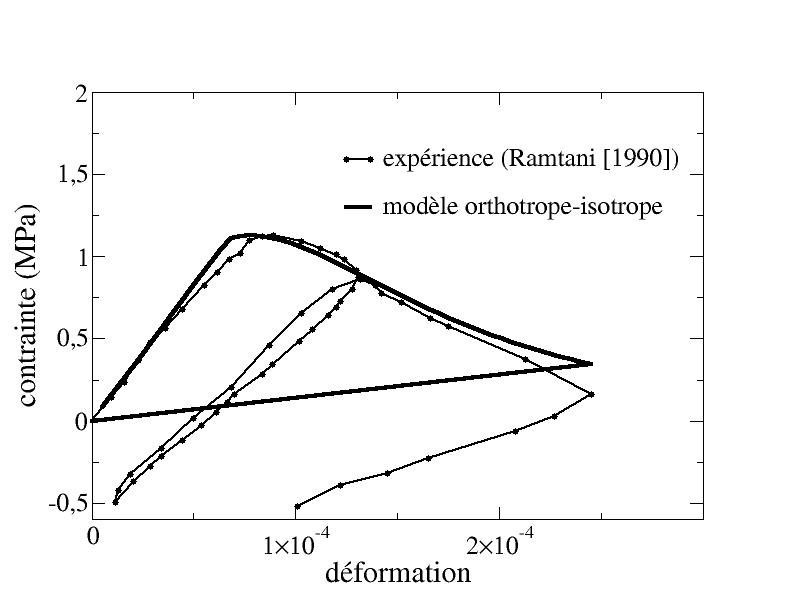
Figure 6 .4-a: Phase de traction simple dans l’essai de Ramtani [1990]
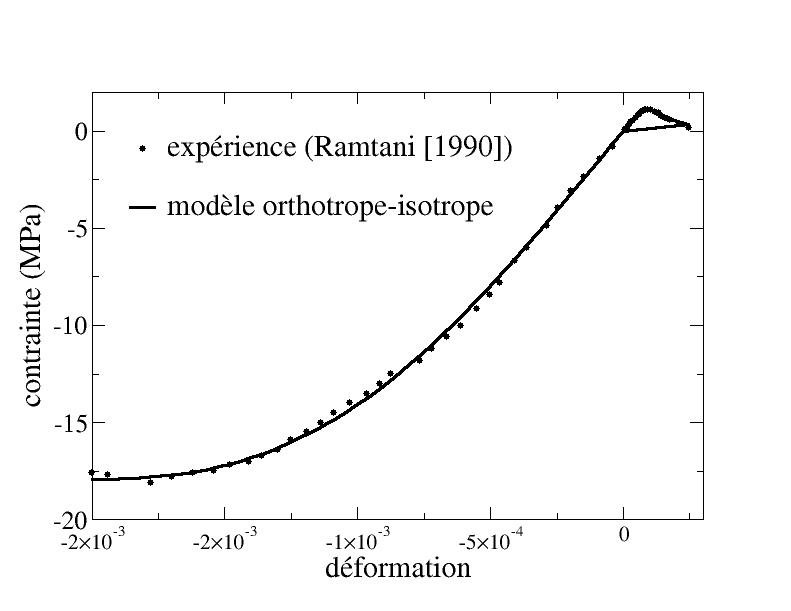
Figure 6 .4-b: Essais de traction suivi d’une compression simple (Ramtani [1990])
Essais biaxiaux#
Ce paragraphe est consacré à l’étude des essais biaxiaux de [bib5]. On cherche d’une part à observer la réponse contrainte-déformation dans le cas d’un chargement uniaxial et de deux chargements biaxiaux en contrainte plane, et d’autre part à décrire l’enveloppe du domaine de rupture dans l’espace des contraintes dans le cas de chargements biaxiaux en contraintes planes.
Remarque:
Les expériences de [bib5] sont relativement anciennes. Ces essais biaxiaux nécessitent d’effectuer un grand nombre d’essais, c’est pourquoi on trouve peu de résultats plus récents sur ce genre d’essais. Nous les utilisons car ils représentent toujours une référence pour les modélisateurs.
La contrainte maximale en valeur absolue de la compression uniaxiale, notée \({\beta}_{p}\) dans [bib5] vaut 4650 \(psi\) (32.1 \(\mathrm{MPa}\) ). Nous normalisons notre réponse par cette contrainte de rupture. Les paramètres que nous utilisons sont les suivants:
\(E\) |
\(\nu\) |
\(\alpha\) |
\({k}_{0}\) (\(\mathrm{MPa}\) ) |
\({\gamma}_{B}\) (\(\mathrm{kJ}/{m}^{3}\) ) |
\({\gamma}_{d}\) (\(\mathrm{kJ}/{m}^{3}\) ) |
\({k}_{1}\) (Mpa) |
\({k}_{2}\) |
32000 |
0.2 |
0.87 |
3.10-4 |
1 |
60 |
10.5 |
6 |
Réponse contrainte-déformation#
On trace dans un premier temps la réponse contrainte-déformation dans le cas d’un chargement uniaxial et de deux chargements biaxiaux en contrainte plane:
\({\sigma}_{2}={\text{\eta \sigma }}_{1}\) avec \(\eta =(0,0.52,1)\) et \({\sigma}_{3}=0\) .
Le modèle nous permet d’obtenir les réponses représentées [Figure 6.5.1-b] que l’on compare aux résultats de [bib5] représentés [Figure 6.5.1-a]. Comme on l’a vu au paragraphe précédent, il est possible de décrire correctement le comportement en compression uniaxial dans la direction de compression. On voit cependant pour cet essai que la déformation latérale prédite par le modèle diminue lorsque l’endommagement se produit alors qu’elle augmente en réalité. Ceci est dû au fait que l’on n’a pas pris en compte l’existence de déformations irréversibles dépendantes de l’endommagement, qui semblent être à l’origine de la dilatation volumique en compression. Ce phénomène est encore plus important dans le cas des essais de bicompression. On observe en effet avec le modèle que le seuil de rupture en bicompression est supérieur à celui en compression simple (moins que les résultats expérimentaux), mais que les déformations à la rupture sont moins importantes dans le cas de bicompression que pour la compression, ce qui ne correspond pas aux résultats expérimentaux.
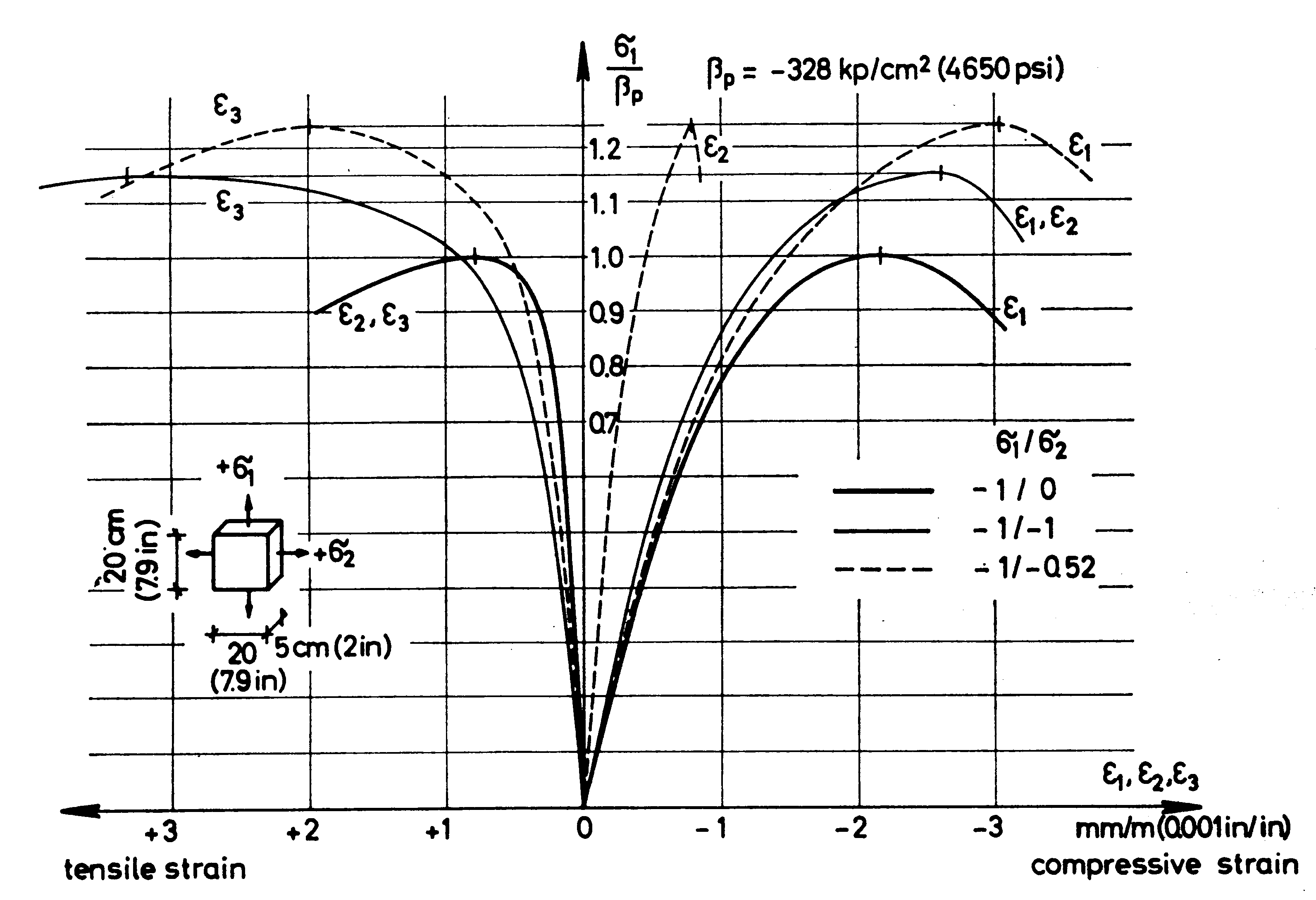
Figure 6.5.1-a: Essai biaxiaux de Kupfer et al. [1969]
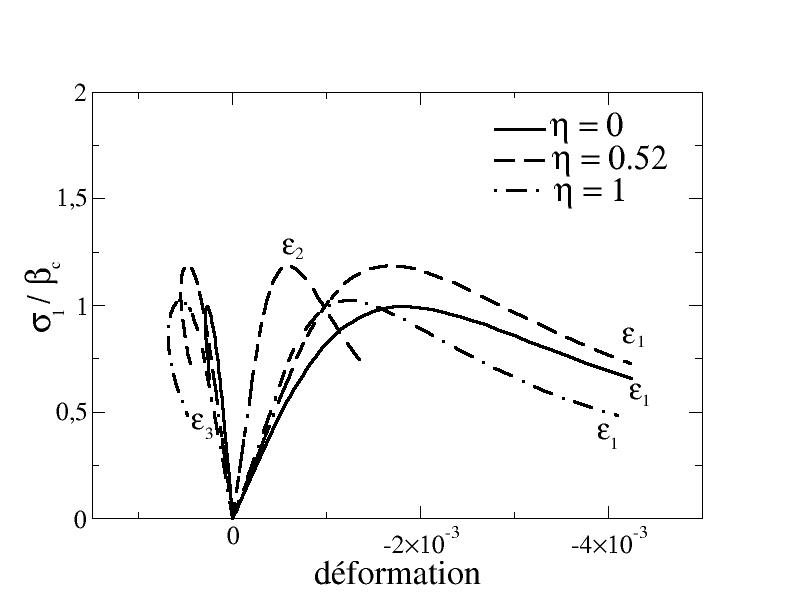
Figure 6.5.1-b: Réponse du modèle pour les essais biaxiaux
Enveloppe du domaine de rupture#
On s’intéresse à présent à l’enveloppe du domaine de rupture pour des essais biaxiaux en contrainte plane. Les résultats expérimentaux obtenus par [bib5] pour différents bétons sont représentés sur la [Figure 6.5.2-a]. On observe une relative similitude de la forme de l’enveloppe de rupture normalisée pour les différents matériaux.
Nous avons repris les paramètres utilisés au paragraphe [§ 6.5.1 ] et nous avons comparé la prédiction de notre modèle pour l’enveloppe de rupture des essais biaxiaux avec les résultats expérimentaux (cf.[Figure 6.5.2-b]).
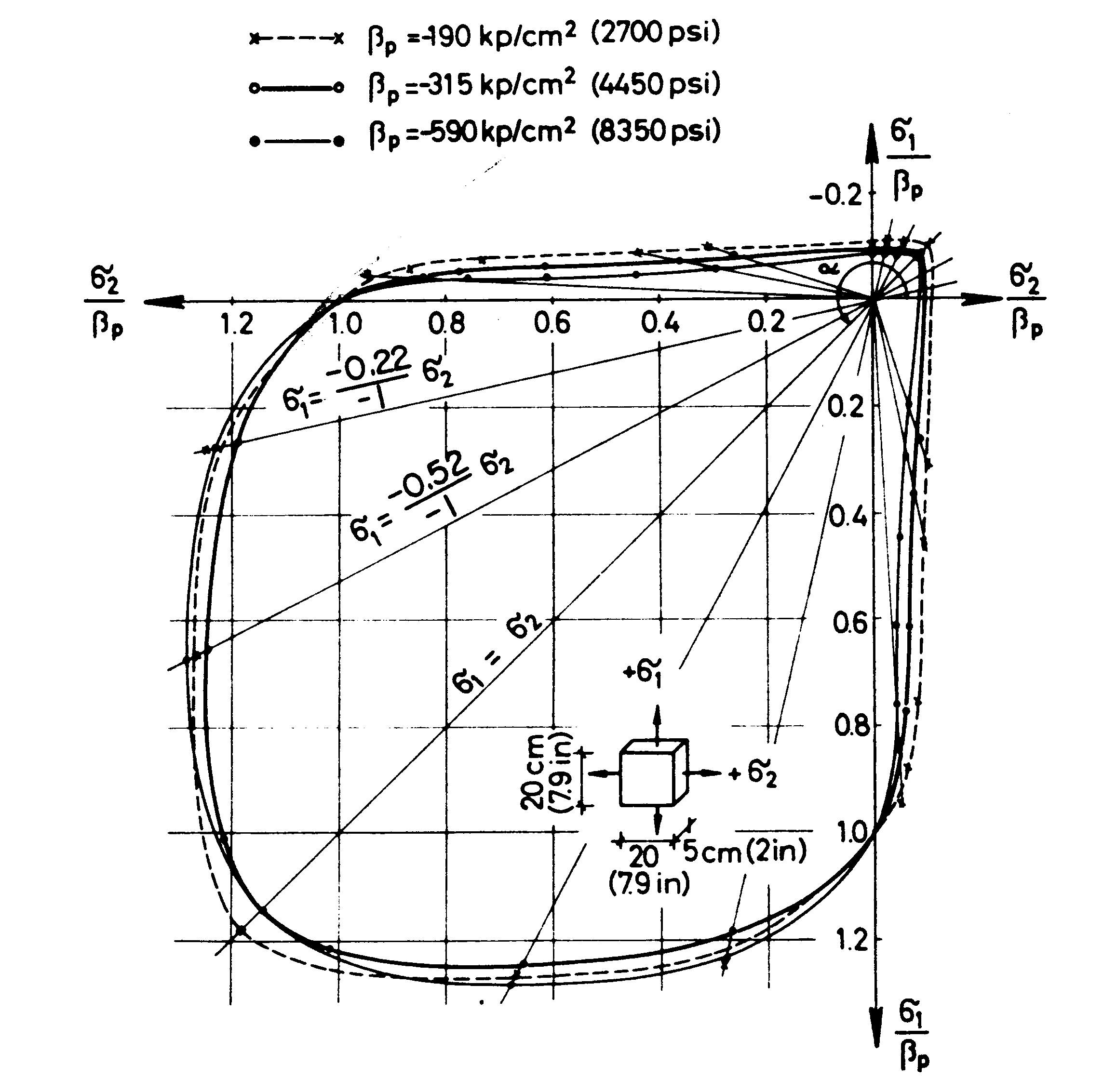
Figure 6.5.2-a: Enveloppe de rupture pour des essais biaxiaux en contraintes planes Kupfer et al. [1969]
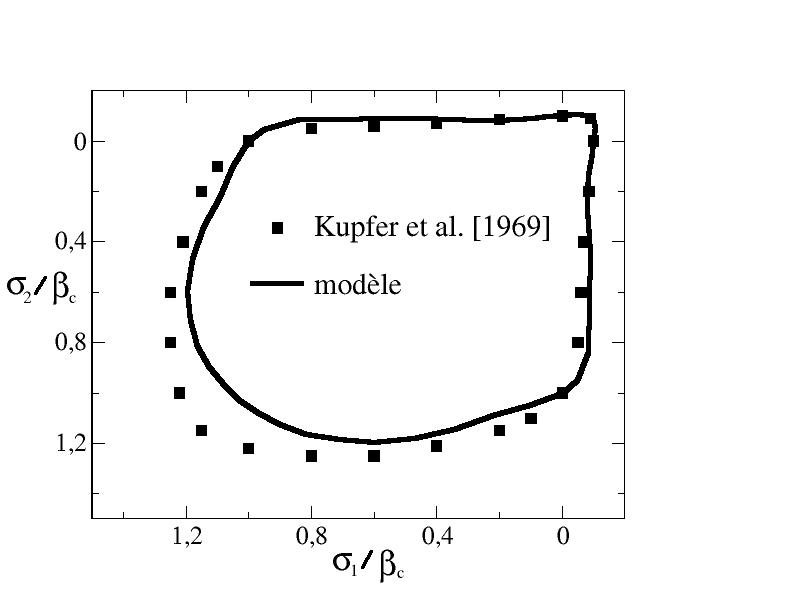
Figure 6.5.2-b: Prédiction du modèle pour l’enveloppe de rupture d’essais biaxiaux en contraintes planes
On observe une correspondance relativement satisfaisante de la prédiction par rapport aux résultats expérimentaux. L’écart le plus important se situe dans la zone de bicompression. Ce problème n’est pas étonnant dans la mesure où nous avons pris le parti de n’utiliser que deux paramètres pour le seuil, qui contrôlent l’allure de l’enveloppe de rupture ainsi que la réponse du modèle en compression. Une étude plus approfondie de la fonction seuil permettrait probablement de mieux approcher les résultats expérimentaux, au prix de l’introduction de nouveaux paramètres.
A1.1 Définition de la décomposition spectrale et des parties positives et négatives d’un tenseur
Soit \(X\) un tenseur d’ordre 2 symétrique. Pour ne pas alourdir les notations, on notera également \(X\) , abusivement, la matrice de ce tenseur dans la base fixe de l’observateur. Soit de plus \(\tilde{X}\) la matrice (diagonale) de ce tenseur dans sa base propre:
\(\tilde{X}=(\begin{array}{ccc}{\tilde{X}}_{1}& 0& 0\\ 0& {\tilde{X}}_{2}& 0\\ 0& 0& {\tilde{X}}_{3}\end{array})\) éq A1.1-1
En notant \({U}_{i}\) le vecteur propre associé à la ième valeur propre, et \(Q=({U}_{1},{U}_{2},{U}_{3})\) la matrice de passage entre la base fixe et la base propre de \(X\) , on a la relation:
\(X=Q.\tilde{X}.{Q}^{T}\) éq A1.1-2
Les parties positive et négative du tenseur \(X\) sont définies par:
\({X}_{+}={P}_{+}:X=Q.{\tilde{X}}_{+}.{Q}^{T}\) avec \({\tilde{X}}_{+}=(\begin{array}{ccc}H({\tilde{X}}_{1}){\tilde{X}}_{1}& 0& 0\\ 0& H({\tilde{X}}_{2}){\tilde{X}}_{2}& 0\\ 0& 0& H({\tilde{X}}_{2}){\tilde{X}}_{3}\end{array})\) éq A1.1-3
\({X}_{-}={P}_{-}:X=Q.{\tilde{X}}_{-}.{Q}^{T}\) avec \({\tilde{X}}_{-}=(\begin{array}{ccc}H(-{\tilde{X}}_{1}){\tilde{X}}_{1}& 0& 0\\ 0& H(-{\tilde{X}}_{2}){\tilde{X}}_{2}& 0\\ 0& 0& H(-{\tilde{X}}_{2}){\tilde{X}}_{3}\end{array})\) éq A1.1-4
où \(H\) est la fonction de Heaviside.
A1.2 Calcul des dérivées
Pour le calcul de la matrice tangente, ainsi que pour le calcul de l’évolution de l’endommagement, nous avons besoin d’évaluer la dérivée des parties positive et négative d’un tenseur par rapport à ce dernier. Il suffit pour cela d’imaginer que le tenseur \(X\) dépend du temps et de calculer les tenseurs \({M}_{+}\) et \({M}_{-}\) définis par:
\({\dot{X}}_{+}={M}_{+}:\dot{X}\) et \({\dot{X}}_{-}={M}_{-}:\dot{X}\) éq A1.2-1
La différentiation de l’équation [éq A1.1-2] nous donne:
\({\dot{X}}_{+}=Q.{\tilde{\dot{X}}}_{+}.{Q}^{T}+\dot{Q}.{\tilde{X}}_{+}.{Q}^{T}+Q.{\tilde{X}}_{+}.{\dot{Q}}^{T}\) éq A1.2-2
Hypothèse:
Il faut établir l’expression de \(\dot{Q}\) . La démonstration qui va suivre n’est valable que si les valeurs propres de \(X\) sont distinctes. Dans la mesure où le calcul de \({M}_{+}\) et \({M}_{-}\) ne sera utilisé que dans des algorithmes de résolution numérique, nous nous permettrons de perturber numériquement d’éventuelles valeurs propres identiques afin de les rendre distinctes et de pouvoir utiliser les résultats ci-dessous.
Pour calculer \(\dot{Q}\) , on a besoin d’exprimer la dérivée des vecteurs propres \({\dot{U}}_{i}\) . Pour cela, selon la démarche de [bib11], on différentie l’expression de \(X\) :
\(X=\sum_{i}{\tilde{X}}_{i}{U}_{i}\otimes {U}_{i}\Rightarrow \dot{X}=\sum_{i}{\tilde{\dot{X}}}_{i}{U}_{i}\otimes {U}_{i}+{\tilde{X}}_{i}{\dot{U}}_{i}\otimes {U}_{i}+{\tilde{X}}_{i}{U}_{i}\otimes {\dot{U}}_{i}\) éq A1.2-3
De plus, on a les relations suivantes entre les vecteurs propres et leur dérivées:
\({U}_{i}.{U}_{j}={\delta}_{ij}\) , \({\dot{U}}_{i}.{U}_{j}+{U}_{i}.{\dot{U}}_{j}=0\) éq A1.2-4
En contractant l’équation [éq A1.2-3] à gauche et à droite par les vecteurs propres, et en utilisant les relations [éq A1.2-4], on obtient les relations suivantes:
\({U}_{i}.\dot{X}.{U}_{i}\Rightarrow {(\dot{\tilde{X}})}_{ii}={\tilde{\dot{X}}}_{i}\) éq A1.2-5
\({U}_{j}.\dot{X}.{U}_{k}\Rightarrow {(\dot{\tilde{X}})}_{\text{jk}}={\tilde{X}}_{k}{U}_{j}.{\dot{U}}_{k}+{\tilde{X}}_{j}{\dot{U}}_{j}.{U}_{k}=({\tilde{X}}_{j}-{\tilde{X}}_{k}){\dot{U}}_{j}.{U}_{k}\text{pour}j\ne k\) éq A1.2-6
Dans ces expressions, il n’y a pas de sommation sur les indices, les \({(\dot{\tilde{X}})}_{\text{jk}}\) désignent les composantes de \(\dot{X}\) dans la base fixe coïncidant avec la base propre de \(X\) à l’instant considéré \(({(\dot{\tilde{X}})}_{\text{jk}}={U}_{j}.\dot{X}.{U}_{k})\) , et les \({\tilde{\dot{X}}}_{i}\) désignent les dérivées des valeurs propres de \(X\) (pas les valeurs propres de la dérivée \(\dot{X}\) .
On déduit de la relation [éq A1.2-6] l’expression de \({\dot{U}}_{j}\) :
\({\dot{U}}_{j}=\sum_{k\ne j}({\dot{U}}_{j}.{U}_{k}).{U}_{k}=\sum_{k\ne j}\frac{{(\dot{\tilde{X}})}_{\text{jk}}}{({\tilde{X}}_{j}-{\tilde{X}}_{k})}{U}_{k}\) éq A1.2-7
Ceci nous permet d’exprimer \(\dot{Q}\) :
\(\dot{Q}=({\dot{U}}_{1},{\dot{U}}_{2},{\dot{U}}_{3})\Rightarrow {\dot{Q}}_{ij}=\sum_{k\ne j}\frac{{(\dot{\tilde{X}})}_{\text{jk}}}{({\tilde{X}}_{j}-{\tilde{X}}_{k})}{Q}_{\text{ik}}\) éq A1.2-8
Les \({(\dot{\tilde{X}})}_{\text{jk}}\) , composantes de \(\dot{X}\) dans la base fixe coïncidant avec la base propre de \(X\) à l’instant considéré, peuvent s’exprimer en fonction des composantes de \(\dot{X}\) dans la base fixe. Ainsi, \(\dot{\tilde{X}}\) désignant la matrice des \({(\dot{\tilde{X}})}_{\text{jk}}\) , on a:
\(\dot{\tilde{X}}={Q}^{T}.\dot{X}.Q\) éq A1.2-9
On déduit de l’expression [éq A1.2-8] l’expression de \(\dot{Q}\) :
\({\dot{Q}}_{ij}=\sum_{k\ne j}\sum_{m,n}\frac{{Q}_{\text{mj}}{Q}_{\text{nk}}{\dot{X}}_{\text{mn}}}{({\tilde{X}}_{j}-{\tilde{X}}_{k})}{Q}_{\text{ik}}\) éq A1.2-10
On a enfin les relations évidentes entre les valeurs propres de \({X}_{+}\) et \(X\) :
\({\tilde{X}}_{+{}_{i}}=H({\tilde{X}}_{i}){\tilde{X}}_{i}\Rightarrow {\tilde{\dot{X}}}_{+{}_{i}}=H({\tilde{X}}_{i}){\tilde{\dot{X}}}_{i}\) éq A1.2-11
On déduit des relations [éq A1.2-5], [éq A1.2-9] et [éq A1.2-11], la relation suivante:
\({\tilde{\dot{X}}}_{+{}_{i}}=H({\tilde{X}}_{i}){\tilde{\dot{X}}}_{i}=H({\tilde{X}}_{i}){(\dot{\tilde{X}})}_{ii}=H({\tilde{X}}_{i}){Q}_{ji}{Q}_{\text{ki}}{\dot{X}}_{\text{jk}}\) éq A1.2-12
Les relations [éq A1.2-10], [éq A1.2-11] et [éq A1.2-12] nous permettent d’exprimer la relation [éq A1.2-2]:
\({\dot{X}}_{+{}_{ij}}=\sum_{k,l}\left[\sum_{m}{Q}_{\text{im}}{Q}_{\text{jm}}{Q}_{\text{km}}{Q}_{\text{lm}}H({\tilde{X}}_{m})\right]{\dot{X}}_{kl}+\sum_{k,l}\left[\sum_{\begin{array}{}m\ne n\\ m,n\end{array}}\frac{{Q}_{\text{km}}{Q}_{\ln}}{\tilde{{X}_{m}}-\tilde{{X}_{n}}}H(\tilde{{X}_{m}})\tilde{{X}_{m}}({Q}_{in}{Q}_{\text{jm}}+{Q}_{\text{im}}{Q}_{\text{jn}})\right]{\dot{X}}_{kl}\)
éq A1.2-13
Comme \(X\) est un tenseur symétrique, on a:
\(X=\frac{1}{2}(X+{X}^{T})\Rightarrow \dot{X}=\frac{1}{2}(\dot{X}+{\dot{X}}^{T})\) éq A1.2-14
Ceci nous permet de récrire l’équation [éq A1.2-13]:
\(\begin{array}{}{\dot{X}}_{+{}_{ij}}=\sum_{k,l}\left[\sum_{m}{Q}_{\text{im}}{Q}_{\text{jm}}{Q}_{\text{km}}{Q}_{\text{lm}}H({\tilde{X}}_{m})\right]{\dot{X}}_{kl}\\ +\frac{1}{2}\sum_{k,l}\left[\sum_{\begin{array}{}m\ne n\\ m,n\end{array}}({Q}_{\text{km}}{Q}_{\ln}+{Q}_{\text{kn}}{Q}_{\text{lm}})\frac{H(\tilde{{X}_{m}})\tilde{{X}_{m}}}{\tilde{{X}_{m}}-\tilde{{X}_{n}}}({Q}_{in}{Q}_{\text{jm}}+{Q}_{\text{im}}{Q}_{\text{jn}})\right]{\dot{X}}_{kl}\end{array}\) éq A1.2-15
On en déduit l’expression des composantes de \({M}_{+}\) :
\({M}_{\text{+ijkl}}=\sum_{m}{Q}_{\text{im}}{Q}_{\text{jm}}{Q}_{\text{km}}{Q}_{\text{lm}}H({\tilde{X}}_{m})+\frac{1}{2}\sum_{\begin{array}{}m\ne n\\ m,n\end{array}}({Q}_{\text{km}}{Q}_{\ln}+{Q}_{\text{kn}}{Q}_{\text{lm}})\frac{H(\tilde{{X}_{m}})\tilde{{X}_{m}}}{\tilde{{X}_{m}}-\tilde{{X}_{n}}}({Q}_{in}{Q}_{\text{jm}}+{Q}_{\text{im}}{Q}_{\text{jn}})\) éq A1.2-16
Par analogie, on en déduit aisément l’expression des composantes de \({M}_{-}\) :
\({M}_{\text{-ijkl}}=\sum_{m}{Q}_{\text{im}}{Q}_{\text{jm}}{Q}_{\text{km}}{Q}_{\text{lm}}H({\tilde{-X}}_{m})+\frac{1}{2}\sum_{\begin{array}{}m\ne n\\ m,n\end{array}}({Q}_{\text{km}}{Q}_{\ln}+{Q}_{\text{kn}}{Q}_{\text{lm}})\frac{H(\tilde{-{X}_{m}})\tilde{{X}_{m}}}{\tilde{{X}_{m}}-\tilde{{X}_{n}}}({Q}_{in}{Q}_{\text{jm}}+{Q}_{\text{im}}{Q}_{\text{jn}})\) éq A1.2-17
On souhaite montrer que lorsqu’une valeur propre de l’endommagement atteint 1 dans une direction, alors cette direction est bloquée et l’endommagement ne peut plus évoluer que dans le plan orthogonal à cette direction.
On se place dans la base propre de l’endommagement:
\(D=\sum_{i}{\tilde{D}}_{i}{e}_{i}\otimes {e}_{i}\) éq A2-1
où \({e}_{i}\) désigne le vecteur propre associé à la valeur propre \({\tilde{D}}_{i}\) .
L’énergie adoptée est la somme d’une énergie élastique et d’une fonction indicatrice des valeurs propresde l’endommagement:
\(\varphi (\varepsilon ,D)={\varphi}^{\text{el}}(\varepsilon ,D)+{I}_{]-\infty ,1]}\left[\max({\tilde{D}}_{i})\right]\) éq A2-2
Le critère d’évolution de l’endommagement s’écrit:
\(f({F}^{D})=\sqrt{\text{tr}({({F}^{D})}_{+}^{2})}-k\le 0\) éq A2-3
L’évolution de la variable interne suit la loi d’écoulement suivante obéissant au principe de normalité:
\(\dot{D}=\dot{\eta}\frac{\partial f}{\partial {F}^{D}}=\dot{\eta}\frac{{F}_{+}^{D}}{\sqrt{{F}_{+}^{D}:{F}_{+}^{D}}},\eta \ge 0.\) éq A2-4
La dérivée \(\dot{D}\) est ainsi colinéaire à \({F}_{+}^{D}\) .
La force thermodynamique dérive de l’énergie libre[éq A2-2]:
\({F}^{D}=-\frac{\partial \varphi }{\partial D}=-\frac{\partial {\varphi}^{\text{el}}}{\partial D}-\frac{\partial {I}_{]-\infty 1]}(\max({\tilde{D}}_{i}))}{\partial D}\) éq A2-5
Hypothèse:
On suppose que l’endommagement vaut 1 dans la direction 1: \({\tilde{D}}_{1}=1\) et qu’il est différent de 1 dans les autres directions. La démonstration serait semblable dans le cas où l’endommagement vaut 1 dans deux directions orthogonales.
La dérivée de la fonction indicatrice par rapport à l’endommagement s’écrit:
\(\frac{\partial I(\max({\tilde{D}}_{i}))}{\partial D}=\frac{\partial I({\tilde{D}}_{1})}{\partial D}=\frac{\partial I({\tilde{D}}_{1})}{\partial {\tilde{D}}_{1}}\frac{\partial {\tilde{D}}_{1}}{\partial {D}_{11}}\frac{\partial {D}_{11}}{\partial D}\) éq A2-6
Or on a: \(\frac{\partial I({\tilde{D}}_{1})}{\partial {\tilde{D}}_{1}}=+\infty\) car \({\tilde{D}}_{1}=1\) ; \({(\frac{\partial {D}_{11}}{\partial D})}_{ij}={\delta}_{\mathrm{1i}}{\delta}_{\mathrm{1j}}\) ; \(\frac{\partial {\tilde{D}}_{1}}{\partial {D}_{11}}=1\) car \({(\dot{D})}_{11}={\tilde{\dot{D}}}_{1}\) (voir Annexe 1).
Ceci nous permet d’écrirela dérivée de l’indicatrice par rapport à l’endommagement:
\(-\frac{\partial I({\tilde{D}}_{i})}{\partial D}=(\begin{array}{ccc}T& 0& 0\\ 0& 0& 0\\ 0& 0& 0\end{array})\) avec \(T=-\infty\) éq A2-7
La dérivée de la partie élastique de l’énergie est à valeurs finies. On l’écrit sous la forme d’une matrice 3x3 symétrique:
\(-\frac{\partial {\varphi}^{\text{el}}}{\partial D}=(\begin{array}{ccc}{a}_{11}& {a}_{12}& {a}_{13}\\ {a}_{12}& {a}_{22}& {a}_{23}\\ {a}_{13}& {a}_{23}& {a}_{33}\end{array})\) éq A2-8
Ceci nous permet d’écrire l’expression de la force thermodynamique:
\({F}^{D}=(\begin{array}{ccc}T+{a}_{11}& {a}_{12}& {a}_{13}\\ {a}_{12}& {a}_{22}& {a}_{23}\\ {a}_{13}& {a}_{23}& {a}_{33}\end{array})\) éq A2-9
On cherche à présent à calculer la partie positive de la force thermodynamique. Pour cela, on doit calculer les valeurs propres de \({F}^{D}\) et les vecteurs propres associés. Pour effectuer commodément ce calcul, nous considérons le terme \(T\) comme très grand négatif (tendant vers \(-\infty\) ) mais non strictement infini.
On a alors \(\mid T\mid \text{>>}\mid {a}_{ij}\mid\) pour tous les indices \(i,j\) . On peut donc écrire la matrice \({F}^{D}\) sous la forme:
\({F}^{D}\approx T(\begin{array}{ccc}1& O(1/T)& O(1/T)\\ O(1/T)& O(1/T)& O(1/T)\\ O(1/T)& O(1/T)& O(1/T)\end{array})\) éq A2-10
Soit \(\lambda ` une valeur propre de :math:`{F}^{D}\) et \(U\) le vecteur propre associé, alors les composantes de \(U\) sont solutions du système suivant:
\({F}^{D}.U=\lambdau \Rightarrow \lbrace \begin{array}{cc}{U}_{1}+O(1/T){U}_{2}+O(1/T){U}_{3}=\frac{\lambda}{T}{U}_{1}& (i)\\ O(1/T){U}_{1}+O(1/T){U}_{2}+O(1/T){U}_{3}=\frac{\lambda}{T}{U}_{2}& (ii)\\ O(1/T){U}_{1}+O(1/T){U}_{2}+O(1/T){U}_{3}=\frac{\lambda}{T}{U}_{3}& (\mathrm{iii})\end{array}\) éq A2-11
Parmi les vecteurs propres, il en existe au moins un pour lequel la composante \({U}_{1}\) est non nulle, car les vecteurs propres forment une base de \({R}^{3}\) . Considérons ce vecteur propre. Alors les équations du système [éqA2-11] imposent:
\(\begin{array}{ccc}(i)& \Rightarrow & \lambda =T\\ (i)\text{et}(ii)& \Rightarrow & {U}_{2}=0\\ (i)\text{et}(\text{iii})& & {U}_{3}=0\end{array}\) éq A2-12
On en déduit que \(T\) est une valeur propre de \({F}^{D}\) et que le vecteur e1 en est le vecteur propre associé.
De plus, la base propre d’une matrice symétrique étant orthogonale, les deux autres vecteurs propres de \({F}^{D}\) sont dans le plan défini par \({e}_{2}\mathrm{et}{e}_{3}\) .
Ainsi la composante \({U}_{1}\) de ces vecteurs propres est nulle. Dans ces conditions, l’équation (i) ne fournit, dans la limite \(T\to -\infty\) , que l’identité \(0=0\) , et les équations (ii) se réduisent, après la multiplication par \(T\) , à:
\(\lbrace \begin{array}{c}{a}_{22}{U}_{2}+{a}_{23}{U}_{3}={\mathrm{\lambda \; U}}_{2}\\ {a}_{23}{U}_{2}+{a}_{33}{U}_{3}={\mathrm{\lambda \; U}}_{3}\end{array}\) éq A2-13
Donc les vecteurs propres de \({F}^{D}\) distincts de \({e}_{1}\) et les valeurs propres associées sont les vecteurs propres et les valeurs propres de la projection \({a}_{\mathrm{2D}}=(\begin{array}{cc}{a}_{22}& {a}_{23}\\ {a}_{23}& {a}_{33}\end{array})\) de la matrice \(a=(\begin{array}{ccc}{a}_{11}& {a}_{12}& {a}_{13}\\ {a}_{12}& {a}_{22}& {a}_{23}\\ {a}_{13}& {a}_{23}& {a}_{33}\end{array})\) dans le plan \(({e}_{2,}{e}_{3})\) .
Il résulte de ce qui précède que la partie positive de \({F}^{D}\) vaut:
\({F}_{+}^{D}=(\begin{array}{ccc}0& 0& 0\\ 0& & \\ 0& & {({a}_{\mathrm{2D}})}_{+}\end{array})\) éq A2-14
Comme \(\dot{D}\) est colinéaire à \({\mathrm{F}}_{+}^{\mathrm{D}}\) , ceci implique que seules les composantes \({D}_{22},{D}_{23},{D}_{33}\) peuvent encore évoluer, les composantes \({D}_{11},{D}_{12},{D}_{13}\) étant désormais fixées.
Fonctionnalités et vérification#
La loi de comportement peut être définie par le mot-clé ENDO_ORTH_BETON (commande STAT_NON_LINE, mot clé facteur COMPORTEMENT). Elle est associée au matériau ENDO_ORTH_BETON (commande DEFI_MATERIAU).
La loi ENDO_ORTH_BETON est vérifiée par les cas tests suivants :
Bibliographie#
V.GODARD: Modélisation de l’endommagement anisotrope du béton avec prise en compte de l’effet unilatéral: Application à la simulation numérique des enceintes de confinement . Thèse de l’Université Paris VI, 2005.
P.B.BADEL: Contributions à la simulation numérique de structures en béton armé . Thèse de l’Université Paris VI, 2001.
R.DESMORAT: Dissymétrie du comportement élastique anisotrope couplée ou non à l’endommagement . C. R. Acad. Sci., t.328, Série Iib, 445-450, 2000.
J.J. MARIGO: Endommagement: Localisation et Stabilité . Ecole d’été d’analyse numérique, EDF/CEA/INRIA, Juillet 2002.
H.KUPFER, H.K.HILSDORF, H.RUSCH : Behaviour of concrete under biaxial stresses , ACI Journal, Title n°66-52, 656-666, August 1969.
Z.P.BAZANT, G.PIJAUDIER-CABOT : Measurement of characteristic length of non local continuum , ASCE J. of Engng. Mech., 115, 755-767, 1989.
J.MAZARS, Y.BERTHAUD: Une technique expérimentale appliquée au béton pour créer un endommagement diffus et mettre en évidence son caractère unilatéral , C. R. Acad. Sci., t.308, Série II , 579-584, 1989.
E.HOGNESTAD, N.W.HANSON, D.McHENRY : Concrete stress distribution in ultimate strength design , J. Am. Concr. Inst. 66, 656-666, 1955.
S.RAMTANI: Contribution à la modélisation du comportement multiaxial du béton endommagé avec description du caractère unilatéral . Thèse de doctorat de l’Université Pierre et Marie Curie (Paris VI), 1990.
J.B.LEBLOND : A constitutive inequality for hyperelastic materials in finite strain , Eur. J.Mech. A/Solids, Vol. 11(4), 447-466, 1992.
B.HALPHEN, Q.S.NGUYEN : Sur les matériaux standards généralisés , Journal de Mécanique, Vol.14 (1), 39-63, 1975.
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
7.4 |
V.Godard EDF-R&D/AMA |
Texte initial |
10.1 |
L.Idoux EDF-R&D/AMA |
Fiche 14931 - correction des équations 2-4-2 (p.8) et 2-5-4 (p.9) - ajout d’un commentaire à la fin de la partie 3.1 (p.12) sur le fait que l’endommagement est borné à 1-tol, et précision sur la conséquence sur le comportement. Corrections de mise en page. |