r7.01.03 Loi de comportement BETON_DOUBLE_DP à double critère Drücker-Prager pour la fissuration et la compression du béton#
Résumé
Le modèle présenté dans ce document, comportement BETON_DOUBLE_DP, est une loi de comportement non linéaire pour le béton. Il s’appuie sur la théorie de la plasticité, il est valable pour les états de contrainte tridimensionnels. Les hypothèses de modélisation retenues sont les suivantes :
un domaine de réversibilité des contraintes délimité par deux critères de type Drücker Prager,
un écrouissage de chacun des critères,
en compression, un écrouissage positif jusqu’à un pic, puis un écrouissage négatif,
en traction, un écrouissage négatif exclusivement,
une dépendance de l’allure des courbes post-pic dans les deux cas (traction/compression) avec la taille de l’élément fini (l’allure de cette courbe est liée à l’écrouissage négatif et à l’énergie de fissuration),
des règles d’écoulement plastiques normales (plasticité associée) et une formulation d’écrouissage isotrope,
la prise en compte de la dépendance des seuils d’élasticité par rapport à la température,
la prise en compte de la dépendance du module d’Young par rapport à la température.
Table des matières
Introduction#
Caractéristiques principales du modèle#
Le modèle présenté dans ce document est une loi de comportement non linéaire pour le béton. Il s’appuie sur la théorie de la plasticité, il est valable pour les états de contrainte tridimensionnels. Les hypothèses de modélisation retenues reprennent en partie les modèles développés par G. Heinfling [bib2] et J. F. Georgin [bib1] et sont les suivantes :
il existe un domaine de réversibilité des contraintes délimité par deux critères de type Drücker Prager,
chacun des critères s’écrouit, le domaine de rupture correspond au maximum du domaine de réversibilité,
en compression, l’écrouissage est positif jusqu’à un pic, puis il devient négatif,
en traction, l’écrouissage est négatif exclusivement,
les courbes post-pic dans les deux cas (traction/compression) varient avec la taille de l’élément fini (l’allure de cette courbe est liée à l’écrouissage négatif et à l’énergie de fissuration),
l’écoulement plastique est régi par une règle de normalité (plasticité associée) la formulation des écrouissages est de type isotrope,
le module d’élasticité et les seuils de réversibilité varient avec la température.
Remarque :
La terminologie de critère de traction et critère de compression est discutable. Nous l’utiliserons par habitude, en étant bien conscient qu’un état de contraintes de traction peut conduire à l’activation du critère dit de compression.
Pourquoi deux critères de Drücker Prager#
Les auteurs des thèses citées en référence [bib1] et [bib2] utilisent un critère de Drücker Prager en compression et un critère de Rankine en traction. Ils justifient ces choix par des considérations physiques en montrant que le domaine de réversibilité ainsi obtenu est proche de la réalité expérimentale. Par contre ils limitent leurs modélisations à des états de contraintes bidimensionnelles. Nous avons préféré remplacer le critère de traction par une surface également du type Drücker Prager. Par ce choix, on s’affranchit de certaines difficultés particulièrement dans les formulations tridimensionnelles. La surface 3D définissant les états de contraintes admissibles vis à vis de la traction n’est plus une pyramide (Rankine 3D) mais une surface conique dont le sommet est situé sur l’axe hydrostatique. La trace du critère «dit de traction» sur le plan déviatorique n’est plus un triangle, mais un cercle. La formulation obtenue est plus simple. La différence entre les deux critères est minime pour des états de contrainte proches d’états de contrainte plane. Par contre, pour les états de contrainte fortement confinés, les deux approches (de Rankine et de Drücker Prager) sont différentes, ce qui est une limite du modèle proposé.
Domaine de réversibilité et fonctions seuils#
Allure du domaine et des seuils de réversibilité#
Le domaine de réversibilité est le domaine de l’espace des contraintes à l’intérieur duquel les trajets de contrainte sont réversibles. Dans l’espace des contraintes principales \(({\sigma}_{1,}{\sigma}_{2,}{\sigma}_{3})\) , il s’agit de deux cônes dont l’axe est la trisectrice d’équation \({\sigma}_{1}={\sigma}_{2}={\sigma}_{3}\) . La [Figure 3.1-a] en donne une représentation graphique.

Figure 3.1‑a

Figure 3.1‑b
Dans un plan \(({\sigma}_{\text{oct}},{\tau}_{\text{oct}})\) le domaine de réversibilité est déterminé par deux droites comme indiqué sur la [Figure 3.1-b].
Pour un état de contrainte plane, le domaine de réversibilité est la coupe du domaine tridimensionnel par un plan d’équation \({\sigma}_{3}=\text{cste}\) , comme indiqué sur la [Figure 3.1-c] , le résultat dans un plan \(({\sigma}_{1},{\sigma}_{2})\) étant représenté sur la figure [Figure 3.1-d].

Figure 3.1‑c

Figure 3.1‑d
Expression mathématique du domaine de réversibilité#
Il est défini par l’inéquation :
\(f(\sigma ,A)\le 0\) éq 3.2‑ 3.2-1
dans laquelle \(A\) représente les forces thermodynamiques associées aux variables internes (nous notons \(\alpha\) l’ensemble des variables internes).
Pour le modèle béton que nous présentons ici, l’équation [ éq 3.2- 3.2-1 ] prend la forme particulière
\({f}_{\text{comp}}(\sigma ,{A}_{c})=\frac{{\tau}_{\text{oct}}+a.{\sigma}_{\text{oct}}}{b}-\phi {f}_{c}^{'}+{A}_{c}\le 0\) éq 3.2‑ 3.2-2
\({f}_{\text{trac}}(\sigma ,{A}_{t})=\frac{{\tau}_{\text{oct}}+c.{\sigma}_{\text{oct}}}{d}-{f}_{t}^{'}+{A}_{t}\le 0\) éq 3.2‑ 3.2-3
\({f}_{{}_{\text{comp}}}^{H}(\sigma ,{A}_{c})=\frac{a.{\sigma}_{\text{oct}}}{b}-\phi {f}_{c}^{'}+{A}_{c}\le 0\) éq 3.2‑ 3.2-4
\({f}_{{}_{\text{trac}}}^{H}(\sigma ,{A}_{t})=\frac{c.{\sigma}_{\text{oct}}}{d}-{f}_{t}^{'}+{A}_{t}\le 0\) éq 3.2‑ 3.2-5
Les équations [ éq 3.2- 3.2-2 ] et [ éq 3.2- 3.2-3 ] correspondent respectivement aux seuils de «compression» et de «traction». Les équations [ éq 3.2- 3.2-4 ] et [ éq 3.2- 3.2-5 ] limitent le seuil de réversibilité dans le domaine de la traction isotrope, elles reviennent à exclure l’axe des abscisses sur la [Figure 3.1-b] au delà des points \({P}_{t}\) ou \({P}_{c}\) . Il est clair qu’une seule de ces deux dernières conditions suffit. Pour le matériau non écroui, le choix des coefficients est tel que et \({\mathrm{OP}}_{t}<{\mathrm{OP}}_{c}\) la condition [ éq 3.2- 3.2-5 ] entraîne [ éq 3.2- 3.2-4 ].
Nous verrons plus tard que l’écrouissage peut inverser l’ordre des points \({P}_{t}\) et \({P}_{c}\) , rendant la condition [ éq 3.2- 3.2-4 ] plus contraignante que [ éq 3.2- 3.2-5 ].
Critère de rupture. choix des coefficients a,b,c et d#
Quand l’état de contrainte atteint le bord du domaine de réversibilité, des déformations plastiques se développent et les seuils se déplacent: ils s’écrouissent. Le seuil de compression «s’agrandit» dans un premier temps, puis diminue, alors que le seuil de traction ne peut que diminuer. Le seuil de rupture correspond au domaine maximal pouvant être atteint, il est représenté sur la [Figure 3.3-a] dans un diagramme de contrainte plane:

Figure 3.3‑a
L’écrouissage des seuils se traduit mathématiquement par l’évolution des quantités \({A}_{c}\) et \({A}_{t}\) , les seuils de rupture correspondant aux maximum des fonctions \({f}_{c}=\phi {f}_{c}'-{A}_{c}\) et \({f}_{t}={f}_{t}'-{A}_{t}\) . Dans les modèles retenus, ces fonctions sont telles que: \(\mathrm{Max}{f}_{c}={f}_{c}'\) et \(\mathrm{Max}{f}_{t}={f}_{t}^{'}\) ;
Les coefficients a, b, c , et d sont donc définis à partir de :
ft” : la résistance en traction uni axiale du béton,
fc” : la résistance en compression uni axiale du béton,
fcc” : la résistance en compression bi axiale du béton,
On définit de plus les coefficients: \(\alpha =\frac{{f}_{t}^{'}}{{f}_{c}^{'}}\) et \(\mathrm{\beta }=\frac{{f}_{\text{cc}}^{'}}{{f}_{c}^{'}}\)
Pour déterminer les coefficients a, b, c et d il faut se donner 4 équations qui expriment en fait que les critères sont atteints pour des états de contraintes particuliers et judicieusement choisis.
Une première possibilité consiste à écrire que les deux critères se coupent sur les axes compression simple (points C de la [Figure 3.3-b]).

Figure 3.3‑b
En rappelant que:
En compression simple: \(\sigma <0;{\sigma}_{\text{oct}}=\frac{\sigma}{3};{\tau}_{\text{oct}}=-\frac{\sqrt{2}}{3}\sigma\)
En bi compression \(\sigma <0;{\sigma}_{\text{oct}}=2\frac{\sigma}{3};{\tau}_{\text{oct}}=-\frac{\sqrt{2}}{3}\sigma\)
En traction simple \(\sigma >0;{\sigma}_{\text{oct}}=\frac{\sigma}{3};{\tau}_{\text{oct}}=\frac{\sqrt{2}}{3}\sigma\)
On obtient alors les relations suivantes:
Numéro de condition |
Etat de contrainte |
Critère atteint |
relation obtenue |
1 |
Compression simple |
Compression |
\(a+\mathrm{3b}=\sqrt{2}\) |
2 |
Bi compression |
Compression |
\(\mathrm{2a}+\frac{3}{\mathrm{\beta }}b=\sqrt{2}\) |
3 |
Traction simple |
Traction |
\(-c+\mathrm{3d}=\sqrt{2}\) |
4 |
Compression simple |
Traction |
\(c+3\alpha d=\sqrt{2}\) |
Tableau 3.3‑a
Qui donne, en posant : \(\alpha =\frac{{f}_{t}^{'}}{{f}_{c}^{'}}\) et \(\mathrm{\beta }=\frac{{f}_{\text{cc}}^{'}}{{f}_{c}^{'}}\)
\(a=\sqrt{2}\frac{\mathrm{\beta }-1}{\mathrm{2\beta }-1}b=\frac{\sqrt{2}}{3}\frac{\mathrm{\beta }}{\mathrm{2\beta }-1}\) éq 3.3‑ 3.3-1
\(c=\sqrt{2}\frac{1-\alpha }{1+\alpha }d=\frac{2\sqrt{2}}{3}\frac{1}{1+\alpha }\) éq 3.3‑ 3.3-2
Mais ce choix est problématique.
En effet, après écrouissage du critère de traction, et pour une limite de traction devenue nulle le domaine d’admissibilité prend la forme indiquée sur la [Figure 3.3-c], rendant non admissibles des états de bicompressions.
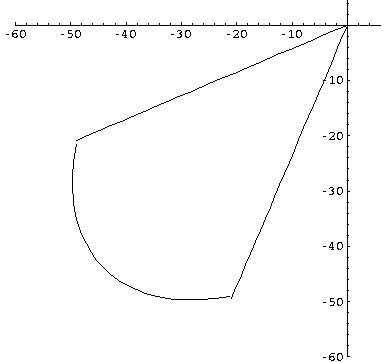
Figure 3.3‑c
De plus, avec ce choix des coefficients, certains trajets de traction compression simple présentaient des snap-back comme indiqué en annexe.
Nous avons alors préféré remplacer la condition numéro 4 du [Tableau 3.3-a] par une condition exprimant que, après que la limite de traction soit retombée à zéro, le domaine de réversibilité est celui représenté sur la [Figure 3.3-d].
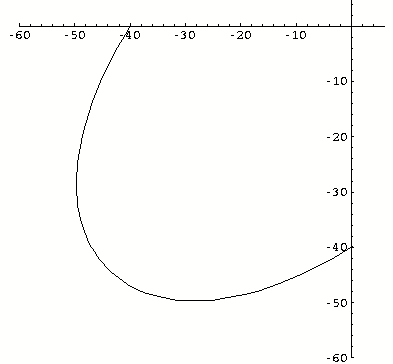
Figure 3.3‑d
Ceci conduit à remplacer la relation \(c+3\alpha d=\sqrt{2}\) par \(c=\sqrt{2}\)
Le choix des coefficients a,b,c et d est finalement:
\(a=\sqrt{2}\frac{\beta -1}{2\beta -1}b=\frac{\sqrt{2}}{3}\frac{\beta }{2\beta -1}\) éq 3.3‑ 3.3-3
\(c=\sqrt{2}d=\frac{2\sqrt{2}}{3}\) éq 3.3‑ 3.3-4

Figure 3.3‑e
La [Figure 3.3-e] montre la différence entre les deux modèles pour un état de contrainte plane.
Analyse du domaine de réversibilité retenu#
Dans ce chapitre, nous donnons des indications sur l’ordre de grandeur des contraintes admissibles au sens du critère retenu. Nous nous attachons à donner des indications sur les contraintes de traction, notamment pour des états de contrainte tridimensionnels.
La [Figure 3.4-a] montre les domaines initiaux (c’est-à-dire avant écrouissage) pour les valeurs suivantes des paramètres matériaux:
\({f}_{c}^{'}\) |
limite initiale de rupture en compression simple: |
\({f}_{c}^{'}\) = 40 Mpa |
\({f}_{\text{cc}}^{'}\) |
limite initiale de rupture en bi compression |
\({f}_{\text{cc}}^{'}\) =44 Mpa |
\(\beta =\frac{{f}_{\text{cc}}^{'}}{{f}_{c}^{'}}\) |
rapport entre limite de rupture en bi-compression et compression simple |
:math:`beta ` = 1.1 |
\(\phi {f}_{c}^{'}\) |
limite d’élasticité en compression; |
\(\varphi =0,33\) |
\({f}_{t}^{'}\) |
limite initiale de rupture en traction |
\({f}_{t}^{'}\) = 4 Mpa |

Figure 3.4‑a
Les figures [Figure 3.4-b], [Figure 3.4-c] et [Figure 3.4-d] montrent les coupes du domaine tridimensionnel par des planes \({\sigma}_{3}=0\) et \({\sigma}_{3}=-25\text{Mpa}\)

Figure 3.4‑b

Figure 3.4‑c

Figure 3.4‑d
La [Figure 3.4-e] montre les domaines de réversibilité dans un plan \(({\sigma}_{1},{\sigma}_{2})\) pour des états de contrainte \({\sigma}_{3}\) constants, domaines paramétrés par la valeur de \({\sigma}_{3}\) . Nous représentons les domaines pour \({\sigma}_{3}=-25\text{Mpa}\) , \({\sigma}_{3}=0\text{Mpa}\) , \({\sigma}_{3}=4\text{Mpa}\) , \({\sigma}_{3}=10\text{Mpa}\) , \({\sigma}_{3}=15\text{Mpa}\) . On y voit que pour un confinement de 25 Mpa de compression, les contraintes de traction peuvent atteindre \(15\mathit{Mpa}\) , et que, parallèlement, le domaine de réversibilité pour \({\sigma}_{3}=15\text{Mpa}\) n ‘est pas vide et correspond à des contraintes de compression \({\sigma}_{1}\) et \({\sigma}_{2}\) ordre de \(-25\mathit{Mpa}\) . On voit également, que, pour une valeur donnée de \({\sigma}_{3}\) , la valeur maximale de traction
Obtenue pour \({\sigma}_{1}\) et \({\sigma}_{2}\) est atteinte à l’intersection des critères de traction et de compression.

Figure 3.4‑e
Nous étudions donc le lieu d’intersection des critères de traction et de compression. Nous notons \(({\sigma}_{H}^{0},{\sigma}_{0}^{\text{eq}})\) le point d’intersection des deux critères dans le plan \(({\sigma}_{H},{\sigma}^{\text{eq}})\) (point C de la [Figure 3.4-f]).

Figure 3.4‑f
Le lieu d’intersection des deux critères dans l’espace des contraintes est donné par:
\(\lbrace \begin{array}{}{\sigma}_{1}=\frac{2}{3}{\sigma}_{0}^{\text{eq}}\sin(\theta +\frac{\pi}{6})+{\sigma}_{H}^{0}\\ {\sigma}_{2}=\frac{2}{3}{\sigma}_{0}^{\text{eq}}\sin(-\theta +\frac{\pi}{6})+{\sigma}_{H}^{0}\\ {\sigma}_{3}=3{\sigma}_{H}^{0}-{\sigma}_{1}-{\sigma}_{2}\end{array}\)
Où \(\theta\) est un paramètre.

Figure 3.4‑g
La [Figure 3.4-g] montre les projections de ce lieu dans les plans \(({\sigma}_{1,}{\sigma}_{2})\) et \(({\sigma}_{2,}{\sigma}_{3})\) .
On peut calculer facilement la valeur maximum de la contrainte le long de cette courbe:
\({\sigma}_{\max}=\frac{{f}_{c}^{'}}{3}+\frac{2}{3\beta }{f}_{t}^{'}\) éq 3.4‑ 3.4-1
Cette équation montre que, quelle que soit la valeur choisie pour la limite de rupture en traction, la contrainte maximale atteinte en traction est supérieure au tiers de la limite de rupture en compression.
La [Figure 3.4-h] montre les trois contraintes principales en fonction du paramètre \(\theta\) .

Figure 3.4‑h
On voit que l’on peut atteindre un niveau de traction de \(15\mathit{Mpa}\) , mais pour un confinement de \({\sigma}_{2}=-25\text{Mpa}\) et \({\sigma}_{3}=-25\text{Mpa}\) .
Pour essayer d’éviter cet inconvénient, qui est important, on peut essayer de jouer sur les valeurs de la résistance en compression et le paramètre :math:`beta ` .
A titre d’exemple, nous avons choisi le jeu suivant de paramètres:
\({f}_{c}^{'}=20\mathit{Mpa}\)
\({f}_{\text{cc}}^{'}=40\mathit{Mpa}\)
\(\beta =2\)
\({f}_{t}^{'}=4\mathit{Mpa}\)
La [Figure 3.4-i] montre les critères avec ce choix de paramètres. La [Figure 3.4-j] montre la valeur des contraintes principales à l’intersection des deux critères pour ce nouveau choix de paramètres. La traction maximum obtenue est plus faible (\(8\mathit{Mpa}\) ), mais elle est atteinte pour un niveau de confinement également plus bas (\(-\mathrm{7Mpa}\) ).

Figure 3.4‑i

Figure 3.4‑j
Ecrouissage#
Comme nous l’avons déjà mentionné au paragraphe [§ 3.3 ] , quand l’état de contrainte atteint le bord du domaine de réversibilité, les déformations plastiques et les variables internes se développent, les seuils se déplacent: ils s’écrouissent. Pour notre modèle, les variables internes sont au nombre de deux, elles sont notées \({\kappa}_{c}^{p}\) pour la variable interne «dite de compression» et \({\kappa}_{t}^{p}\) pour celle «dite de traction». Ces variables déterminent l’évolution des seuils de compression et de traction respectivement, les forces thermodynamiques leurs sont reliées par les relations:
\({A}_{c}=\phi {f}_{c}^{'}-{f}_{c}({\kappa}_{c}^{p})\) éq 3.5‑ 3.5-1
et
\({A}_{t}={f}_{t}^{'}-{f}_{t}({\kappa}_{t}^{p})\) éq 3.5‑ 3.5-2
où \({f}_{c}({\kappa}_{c}^{p})\) et \({f}_{t}({\kappa}_{t}^{p})\) représentent les valeurs des résistances en compression et traction respectivement.
Fonctions d’écrouissage#
La fonction \({f}_{c}({\kappa}_{c}^{p})\) est d’abord croissante puis décroissante, la partie décroissante étant soit linéaire [Figure 3.5.1-a], soit quadratique [Figure 3.5.1-b],

Figure 3.5.1-a

Figure 3.5.1-b
\(\phi\) est une donnée du modèle. L’allure de la courbe entre \({\kappa}_{c}^{e}\) et \({\kappa}_{c}^{e}\) (écrouissage négatif) dépend de l’élément, et plus précisément de ses dimensions, suivant un critère analogue à celui choisi par G.Heinfling, [ Error: Reference source not found ] pour la prise en compte de la localisation des déformations.
En traction, l’allure de la courbe donnant la valeur de la limite d’élasticité \({f}_{t}({\kappa}_{t}^{p})\) en fonction de la déformation plastique cumulée \({\kappa}_{t}^{p}\) ne comporte pas de partie « pré-pic », la partie «post-pic» étant soit linéaire [Figure 3.5.1-c], soit exponentielle [Figure 3.5.1-d].

Figure 3.5.1-c

Figure 3.5.1-d
Courbes d’écrouissage et modules post pic#
Modèle de fissuration répartie#
L’introduction d’un comportement adoucissant post-pic dans les relations contraintes-déformations pose un problème majeur. Sous sollicitation statique, au delà d’un certain niveau de contrainte, correspondant à l’amorce du comportement adoucissant, les équations régissant l’équilibre de la structure perdent leur nature elliptique. Ces équations du problème mécanique forment alors un système d’équations aux dérivées partielles mal posées dont le nombre de solutions est multiple. Ce problème se traduit par une non-objectivité par rapport au maillage. Il en découle une sensibilité pathologique de la solution numérique à la finesse et à l’orientation du maillage.
Afin de résoudre ce problème, ou au moins, d’en limiter les conséquences sur la fiabilité de la solution prédite, il est nécessaire d’utiliser des techniques dites de régularisation. L’objet de ces techniques est d’enrichir la description mécanique du milieu, pour pouvoir décrire des états non homogènes de déformation, et pour préserver la nature mathématique du problème. On opère cette régularisation en introduisant, dans la loi de comportement, une longueur caractéristique ou longueur interne, reliée à la largeur de la zone de localisation. Plusieurs techniques sont possibles pour améliorer la description mécanique du milieu adoucissant. Elles constituent des limiteurs de localisation. La mise en œuvre de ces techniques nécessite en général, des développements numériques délicats. Une approche intermédiaire entre l’utilisation des modèles classiques et la mise en œuvre de ces limiteurs de localisation consiste à faire dépendre la pente post-pic de la relation contrainte-déformation, de la taille de l’élément, de manière à dissiper à la rupture une énergie constante. Cette approche constitue un pas vers une description non locale du milieu continu.
Considérons d’abord une fissure réelle de surface \(S\) dont la mesure est A [Figure 3.5.2.1-a]. \(S\) est une surface de discontinuité du champ de déplacement \(u\) . On suppose que pour créer cette discontinuité, il faut dépenser une énergie \(W\) dont l’expression est: \(\text{W=}{\int}_{S}{G}_{f}(x)\text{dS}\) , \({G}_{f}\) étant une propriété du matériau.
Considérons maintenant que l’on veuille représenter le même phénomène, en représentant non pas une discontinuité de déplacement mais une déformation plastique uniformément répartie dans un volume \(V\) .
L’énergie dissipée sera: \(\text{W=}{\int}_{v}\text{dV}{\int}_{0}^{{t}_{r}}{\sigma}^{ij}\frac{d{\varepsilon}_{ij}^{p}}{\mathrm{dt}}\mathrm{dt}\) , où on a noté

le «temps à rupture».

Figure 3.5.2.1-a
En faisant la série d’hypothèses suivantes:
la fissure est plane,
\({G}_{f}\) est constant le long de la fissure et donc \(\text{W=}A.{G}_{f}\) ,
\(V\) est un cylindre de base \(S\) et d’une hauteur \({L}_{\text{ver}}\) ,
\({g}_{f=}{\int}_{0}^{{t}_{t}}{\sigma}^{ij}\frac{{\mathrm{d\varepsilon }}_{ij}^{p}}{\text{dt}}\text{dt}\) est constant dans \(V\) .
On aboutit finalement à la relation:
\(W={\text{Vg}}_{f}=V{\int}_{0}^{{t}_{t}}{\sigma}^{ij}\frac{{\mathrm{d\varepsilon }}_{ij}^{p}}{\text{dt}}\text{dt}=A.{G}_{f}\) éq 3.5.2.1-1
Ou encore:
\({g}^{f}={\int}_{0}^{{t}_{r}}{\sigma}^{ij}\frac{d{\varepsilon}_{ij}^{p}}{\mathrm{dt}}\mathrm{dt}=\frac{{G}_{f}}{{L}_{\mathrm{ver}}}\) éq 3.5.2.1-2
On voit facilement que: \({g}^{f}={\int}_{0}^{{\kappa}_{u}}f(\kappa )\mathrm{d\kappa }\) , écriture dans laquelle les quantités \(({g}^{f},f,{\kappa}_{u},\kappa )\) représentent respectivement \(({g}_{t}^{f},{f}_{t},{\kappa}_{t}^{u},{\kappa}_{t}^{p})\) en traction et \(({g}_{c}^{f},{f}_{c},{\kappa}_{c}^{u},{\kappa}_{c}^{p})\) en compression. La donnée de \({g}^{f}\) détermine donc \({k}_{u}\) , ceci en traction comme en compression:
\({g}_{c}^{f}={\int}_{0}^{{k}_{c}^{u}}f({\kappa}_{c}^{p}){\mathrm{d\kappa }}_{c}^{p}=\frac{{G}_{c}^{f}}{{L}_{\mathrm{ver}}}\)
\({g}_{t}^{f}={\int}_{0}^{{k}_{t}^{u}}f({\kappa}_{t}^{p}){\mathrm{d\kappa }}_{t}^{p}=\frac{{G}_{t}^{f}}{{L}_{\mathrm{ver}}}\)
La quantité \({g}^{f}\) est donc liée à la pente de la courbe post pic dans un diagramme contrainte-variable d’écrouissage, laquelle est liée à la pente post pic dans un diagramme contrainte déformation.
Supposons par exemple que la relation contrainte déformation soit linéaire en régime post pic. Appelons \({E}_{T}<0\) la pente post pic dans le diagramme \((\sigma ,\varepsilon )\) et \(h<0\) la pente correspondante dans de diagramme \((f,\kappa )\) [Figure 3.5.2.1-b]. On a les relation \(h=\frac{{\text{EE}}_{T}}{E-{E}_{T}}\iff {E}_{T}=\frac{\text{hE}}{E+h}\) qui montrent que on doit avoir:
\(-h<E\) , faute de quoi le diagramme \((\sigma ,\varepsilon )\) présente un snap back.

Figure 3.5.2.1-b
La condition \(-h<E\) est dite condition d’applicabilité, elle se traduira par une inégalité sur \({g}^{f}\) et donc sur \({L}_{\text{ver}}\) .
Dans le cadre d’une résolution par la méthode des éléments finis, le volume élémentaire représentatif du milieu fissuré peut être assimilé à un élément du maillage. La longueur caractéristique (notée par la suite \({l}_{c}\) ) introduite dans la méthode de l’énergie de rupture équivalente correspond à la longueur \(\mathit{Lver}\) . Lors d’un calcul correspondant à une structure quelconque, la détermination de cette longueur caractéristique est délicate. Elle dépend de la position du plan de fissure, des dimensions et du type des éléments …
Une estimation simple pour les cas bidimensionnels peut s’exprimer sous la forme :
\({l}_{c}=r\sqrt{{A}_{e}}\) où \({A}_{e}\) est l’aire de l’élément considéré, et \(r\) , un facteur correcteur, valant 1 pour les éléments quadratiques, et \(\sqrt{2}\) pour les éléments linéaires.
On peut étendre cette formulation au cas 3D : \({l}_{c}=r\sqrt[3]{{V}_{e}}\) où \({V}_{e}\) désigne le volume de l’élément.
Concernant l’évolution de l’écrouissage avec la température, nous considérons comme dans [bib2] que les énergies de rupture et les résistances à rupture dépendent non pas de la température courante

du point matériel considéré au temps \(t\) , mais de la température maximale atteinte en ce point depuis le début du chargement jusqu’au temps \(t\) . Quand nous aurons besoin de montrer la dépendance des quantités par rapport à la température, nous noterons:
\(\theta\) le maximum de la température depuis le début de chargement,
\({f}_{c}^{'}(\theta )\) la résistance en compression,
\({f}_{t}^{'}(\theta )\) désigne la résistance en traction,
\({f}_{c}(\theta ,{\kappa}_{c}^{p})\) la courbe d’écrouissage en compression,
\({f}_{t}(\theta ,{\kappa}_{t}^{p})\) la courbe d’écrouissage en traction.
Comportement du béton en traction et courbe post-pic linéaire#
Dans cette modélisation, le béton est supposé élastique jusqu’à sa résistance en traction \({f}_{t}^{'}\) . La courbe \({f}_{t}({\kappa}_{t}^{p})\) en traction est représentée sur la [Figure 3.5.1-c] et est entièrement définie par la résistance en traction du matériau, l’énergie de fissuration \({G}_{t}^{f}\) , et la longueur caractéristique \({l}_{c}\) .
L’expression mathématique de cette courbe est:
\({f}_{t}(\theta ,{\kappa}_{t}^{p})={f}_{t}^{'}(\theta )(1-\frac{{\kappa}_{t}^{p}}{{\kappa}_{t}^{u}(\theta )})\) éq 3.5.2.2-1
L’équivalence de l’énergie dissipée permet d’écrire :
\({G}_{t}^{f}(\theta )={l}_{c}\underset{0}{\overset{{\kappa}_{t}^{u}}{\int}}{f}_{t}(\theta ,{\kappa}_{t}^{p})={l}_{c}{f}_{t}^{\prime }(\theta )\underset{0}{\overset{{\kappa}_{t}^{u}}{\int}}(1-\frac{{\kappa}_{t}^{p}}{{\kappa}_{t}^{u}(\theta )})d{\kappa}_{t}^{p}\)
d’où
\({G}_{t}^{f}(\theta )=\frac{{l}_{c}.{f}_{t}^{\prime }(\theta ).{\kappa}_{t}^{u}(\theta )}{2}\) éq 3.5.2.2-2
et
\({\kappa}_{t}^{u}(\theta )=\frac{2.{G}_{t}^{f}(\theta )}{{l}_{c}.{f}_{t}^{\prime }(\theta )}\) éq 3.5.2.2-3
La condition d’applicabilité s’écrit :
\({l}_{c}\le \frac{2.E(\theta ).{G}_{t}^{f}(\theta )}{{f}_{t}^{{\prime }^{2}}(\theta )}\) éq 3.5.2.2-4
Comportement du béton en traction et courbe post-pic exponentielle#
Dans cette modélisation, le béton est supposé élastique jusqu’à sa résistance en traction

. La courbe \({f}_{t}({\kappa}_{t}^{p})\) en traction est représentée sur la [Figure 3.5.1-d] et est entièrement définie par la résistance en traction du matériau, l’énergie de fissuration \({G}_{t}^{f}\) , et la longueur caractéristique \({l}_{c}\) .
L’expression mathématique de cette courbe est:
\({f}_{t}(\theta ,{\kappa}_{t}^{p})={f}_{t}^{'}(\theta ).\exp(-a\frac{{\kappa}_{t}^{p}}{{\kappa}_{t}^{u}(\theta )})\) éq 3.5.2.3-1
L’équivalence de l’énergie dissipée permet d’écrire :
\({G}_{t}^{f}(\theta )={l}_{c}\underset{0}{\overset{\infty}{\int}}{f}_{t}(\theta ,{\kappa}_{t}^{p})={l}_{c}{f}_{{t}^{\prime }}(\theta )\underset{0}{\overset{\infty}{\int}}\exp(-a\frac{{\kappa}_{t}^{p}}{{\kappa}_{t}^{u}(\theta )}){\mathrm{d\kappa }}_{t}^{p}\)
D’où:
\({G}_{t}^{f}(\theta )=\frac{{l}_{c}.{f}_{t}^{\prime }(\theta ).{\kappa}_{t}^{u}(\theta )}{a}\) éq 3.5.2.3-2
et
\(\frac{{\kappa}_{t}^{u}(\theta )}{a}=\frac{{G}_{t}^{f}(\theta )}{{l}_{c}.{f}_{t}^{\prime }(\theta )}\) éq 3.5.2.3-3
Soit encore: \({f}_{t}(\theta ,{\kappa}_{t}^{p})={f}_{t}^{'}(\theta ).\exp(-{l}_{c}.{f}_{t}^{'}(\theta )\frac{{\kappa}_{t}^{p}}{{G}_{t}^{f}(\theta )})\)
La pente maximale de la courbe est alors \({h}_{\max}(\theta )=\frac{-{l}_{c}.{f}_{t}^{{\prime }^{2}}(\theta )}{{G}_{t}^{f}(\theta )}\)
et la condition d’applicabilité s’écrit:
\(\begin{array}{cc}{l}_{c}\le \frac{E(\theta ).{G}_{t}^{f}(\theta )}{{f}_{t}^{{\prime }^{2}}(\theta )}& \forall \theta \end{array}\) éq 3.5.2.3-4
Comportement du béton en compression et courbe post-pic linéaire#
Dans cette modélisation, le comportement du béton est supposé élastique jusqu’à la limite d’élasticité, donnée par un coefficient de proportionnalité (noté \(\phi\) en pourcentage de la résistance au pic \({f}_{c}^{'}(\theta )\) . Pour les bétons standard \(\phi\) est de l’ordre de 30%. La courbe \({f}_{c}({\kappa}_{c}^{p})\) en compression est représentée sur la [Figure 3.5.1-a] et est entièrement définie par la résistance en traction du matériau, l’énergie de fissuration \({G}_{c}^{f}\) , et la longueur caractéristique \({l}_{c}\) .
L’expression mathématique de cette courbe est:
\(\lbrace \begin{array}{cccc}{f}_{c}(\theta ,{\kappa}_{c}^{p})=f{'}_{c}(\theta )(\phi +(2-2\varphi )\frac{{\kappa}_{c}^{u}}{{\kappa}_{e}(\theta )}+(\phi -1)\frac{{\kappa}_{c}^{{p}^{2}}}{{\kappa}_{{e}^{2}}(\theta )})& \text{si}& {\kappa}_{c}^{p}\le {\kappa}_{e}(\theta )& \text{éq}3.5.2.4-1\\ {f}_{c}(\theta ,{\kappa}_{c})=f{'}_{c}(\theta )(\frac{({\kappa}_{c}^{p}-{\kappa}_{c}^{u}(\theta ))}{({\kappa}_{e}(\theta )-{\kappa}_{c}^{u}(\theta ))})& \text{si}& {\kappa}_{e}(\theta )\le {\kappa}_{c}^{p}\le {\kappa}_{c}^{u}(\theta )& \text{éq}3.5.2.4-2\end{array}\)
La résistance en compression maximum est atteinte lorsque : \({\kappa}_{e}(\theta )=(2-2\phi )\frac{{f}_{c}^{\prime }(\theta )}{E(\theta )}\)
L’équivalence de l’énergie dissipée permet d’écrire :
\({G}_{c}^{f}(\theta )={l}_{c}\underset{0}{\overset{{\kappa}_{c}^{u}}{\int}}{f}_{c}(\theta ,{\kappa}_{c}^{p})d{\kappa}_{c}^{p}\)
d’où
\({G}_{c}^{f}(\theta )={l}_{c}.{f}_{c}^{\prime }(\theta )(\frac{2\phi +1}{6}{\kappa}_{e}(\theta )+\frac{1}{2}{\kappa}_{c}^{u}(\theta ))\) éq 3.5.2.4-3
et
\({\kappa}_{c}^{u}(\theta )=\frac{2.{G}_{c}^{f}(\theta )}{{l}_{c}.{f}_{c}^{\prime }(\theta )}-\frac{2\phi +1}{3}{\kappa}_{e}(\theta )\) éq 3.5.2.4-4
La pente de la courbe est alors \(h(\theta )=-\frac{{f}_{c}^{\prime }(\theta )}{{\kappa}_{c}^{u}(\theta )-{\kappa}_{e}(\theta )}\)
et la condition d’applicabilité s’écrit:
\(\begin{array}{cc}{l}_{c}\le \frac{E(\theta ).{G}_{c}^{f}(\theta )}{{f}_{c}^{{\prime }^{2}}(\theta )}\frac{6}{11-4\phi -4{\phi }^{2}}& \forall \theta \end{array}\) éq 3.5.2.4-5
Comportement du béton en compression et courbe post-pic non linéaire#
Dans cette modélisation, le comportement du béton est supposé élastique jusqu’à la limite d’élasticité, donnée par un coefficient de proportionnalité (noté \(\phi\) en pourcentage de la résistance au pic . \({f}_{c}^{'}(\theta )\) . Pour les bétons standard \(\phi\) est de l’ordre de 30%. La courbe \({f}_{c}({\kappa}_{c}^{p})\) en compression est représentée sur la [Figure 3.5.1-b] et est entièrement définie par la résistance en traction du matériau, l’énergie de fissuration \({G}_{c}^{f}\) , et la longueur caractéristique \({l}_{c}\) .
L’expression mathématique de cette courbe est:
\(\lbrace \begin{array}{cccc}{f}_{c}(\theta ,{\kappa}_{c}^{p})={f}_{c}^{'}(\theta )(\phi +(2-2\phi )\frac{{\kappa}_{c}^{p}}{{\kappa}_{e}(\theta )}+(\phi -1)\frac{{\kappa}_{c}^{{p}^{2}}}{{\kappa}_{{e}^{2}}(\theta )})& \text{si}& {\kappa}_{c}^{p}\le {\kappa}_{e}(\theta )& \text{éq}3.5.2.5-1\\ {f}_{c}(\theta ,{\kappa}_{c})={f}_{c}^{'}(\theta )(1-\frac{{({\kappa}_{c}^{p}-{\kappa}_{e}(\theta ))}^{2}}{{({\kappa}_{c}^{u}(\theta )-{\kappa}_{e}(\theta ))}^{2}})& \text{si}& {\kappa}_{e}(\theta )\le {\kappa}_{c}^{p}\le {\kappa}_{c}^{u}(\theta )& \text{éq}3.5.2.5-2\end{array}\)
La résistance en compression maximum est atteinte lorsque : \({\kappa}_{e}(\theta )=(2-2\phi )\frac{{f}_{c}^{\prime }(\theta )}{E(\theta )}\)
L’équivalence de l’énergie dissipée permet d’écrire :
\({G}_{c}^{f}(\theta )={l}_{c}\underset{0}{\overset{{\kappa}_{c}^{u}}{\int}}{f}_{c}(\theta ,{\kappa}_{c}^{p}){\mathrm{d\kappa }}_{c}^{p}\)
d’où:
\({G}_{c}^{f}(\theta )={l}_{c}.{f}_{c}^{\prime }(\theta )(\frac{2}{3}{\kappa}_{c}^{u}(\theta )+\frac{\phi }{3}{\kappa}_{e}(\theta ))\) éq 3.5.2.5-3
et:
\({\kappa}_{c}^{u}(\theta )=\frac{3}{2}\frac{{G}_{c}^{f}(\theta )}{{l}_{c}.{f}_{c}^{\prime }(\theta )}-\frac{\phi }{2}{\kappa}_{e}(\theta )\) éq 3.5.2.5-4
La pente maximale de la courbe post-pic est alors \({h}_{\max}(\theta )=-\frac{2.{f}_{c}^{\prime }(\theta )}{{\kappa}_{c}^{u}(\theta )-{\kappa}_{e}(\theta )}\)
et la condition d’applicabilité s’écrit:
\(\begin{array}{cc}{l}_{c}\le \frac{3}{2}\frac{E(\theta ).{G}_{c}^{f}(\theta )}{{f}_{c}^{{\prime }^{2}}(\theta )}\frac{1}{4-\phi -{\phi }^{2}}& \forall \theta \end{array}\) éq 3.5.2.5-5
Ecoulement plastique#
Dans ce paragraphe, nous donnons l’expression des vitesses de déformation plastique, en distinguant le cas dit général où l’état de contrainte est situé sur une zone «régulière» du bord du domaine de réversibilité et le cas où il est au sommet d’un des cônes.
Forme générale de la règle de normalité#
Dans l’espace \((\sigma ,A)\) , les inégalités [ éq 3.2- 3.2-2 ], [ éq 3.2- 3.2-3 ], [ éq 3.2- 3.2-4 ], [ éq 3.2- 3.2-5 ], définissent un domaine convexe que nous noterons \({C}_{(\sigma ,A)}\) . Nous noterons \({\Psi}_{c}\) la fonction indicatrice de ce convexe:
\({\psi}_{c}(\sigma ,A)=\lbrace \begin{array}{c}0\text{si}(\sigma ,A)\in {C}_{(\sigma ,A)}\\ \infty \text{sinon}\end{array}\) éq 4.1‑ 4.1-1
Quand la frontière du domaine de réversibilité est atteinte, des déformations plastiques irréversibles se développent, selon la théorie classique de la plasticité.
Pour un matériau standard, [bib4] la loi d’écoulement vérifie le principe du travail plastique maximum, ce qui se traduit par l’équation:
\(({\dot{\varepsilon}}^{p},\dot{\alpha})\in \partial {\Psi}_{c}\) éq 4.1‑ 4.1-2
où \(\partial {\Psi}_{c}\) note le sous différentiel de la fonction \({\Psi}_{c}\) . Nous rappelons [bib3] que le sous différentiel d’une fonction convexe en un point \(x\) est l’ensemble des vecteurs \(z\) tels que: \(f({x}^{\text{*}})\ge f(x)+\langle z,{x}^{\text{*}}-x\rangle \forall {x}^{\text{*}}\)
On voit alors facilement que [ éq 4.1- 4.1-2 ] entraîne:
\({\Psi}_{c}({\sigma}^{\text{*}},{A}^{\text{*}})\ge {\Psi}_{c}(\sigma ,A)+{\dot{\varepsilon}}^{p}({\sigma}^{\text{*}}-\sigma )+\dot{\alpha}({A}^{\text{*}}-A)\forall {\sigma}^{\text{*}}\mathrm{et}{A}^{\text{*}}\) éq 4.1‑ 4.1-3
Compte tenu de la définition de la fonction caractéristique, on voir facilement que [ :ref:` éq 4.1- 4.1-3 <Ref523040324>` ] est équivalent à:
\({\dot{\varepsilon}}^{p}\sigma +\dot{\alpha}A\ge {\dot{\varepsilon}}^{p}{\sigma}^{\text{*}}+\dot{\alpha}{A}^{\text{*}}\forall {\sigma}^{\text{*}}\mathrm{et}{A}^{\text{*}}\in {C}_{(\sigma ,A)}\) éq 4.1‑ 4.1-4
En d’autres termes l’écoulement plastique est tel que le couple \((\sigma ,A)\) réalise le maximum de la dissipation plastique parmi les forces thermodynamiques admissibles.
Expression de l’écoulement plastique en partie courante#
Quand la fonction \(f\) est différentiable au point considéré \((\sigma ,A)\) la règle de normalité s’écrit simplement
\({\dot{\varepsilon}}^{p}=\dot{\lambda}\frac{\partial f}{\partial \sigma }\) éq 4.2‑ 4.2-1
\(\dot{\alpha}=\dot{\lambda}\frac{\partial f}{\partial A}\) éq 4.2‑ 4.2-2
\(\dot{\lambda}\) et \(f\) vérifiant les conditions de Kuhn-Tucker :
\(\begin{array}{c}\dot{\lambda}\ge 0\\ f\le 0\\ \dot{\lambda}.f=0\end{array}\rbrace\) éq 4.2‑ 4.2-3
La variable d’écrouissage est liée au multiplicateur plastique par la loi d’écrouissage. En utilisant le travail plastique, on peut écrire: \(\dot{\kappa}f=\sigma {\dot{\varepsilon}}^{p}\) .
Si \(f\) est une fonction homogène d’ordre 1 par rapport à la variable tensorielle \(\sigma\) , on a \(\sigma \frac{\partial f}{\partial \sigma }=f\) , ce qui conduit à l’égalité: \(\dot{\lambda}=\dot{\kappa}\) et donc finalement aux équations:
\({\dot{\varepsilon}}_{c}^{p}=\dot{{\kappa}_{c}^{p}}\frac{\partial {f}_{\mathit{comp}}}{\partial \sigma }\) éq 4.2‑ 4.2-4
\({\dot{\varepsilon}}_{t}^{p}=\dot{{\kappa}_{t}^{p}}\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma }\) éq 4.2‑ 4.2-5
Expression de l’écoulement plastique au sommet d’un cône#
Nous donnons deux présentations du même résultat. La première présentation utilise la théorie des matériaux standards généralisés et les sous différentiels, la seconde part d’une égalité posée a priori sur le travail plastique.
Démonstration par la théorie générale des matériaux standards#
Le domaine \({C}_{(\sigma ,A)}\) est constitué de deux cônes. La fonction \({\Psi}_{c}\) n’est pas différentiable soit à l’intersection de ces deux cônes, soit au sommet de chacun de ces cônes. Quand le point \((\sigma ,\mathrm{A})\) appartient à l’intersection des deux cônes, les équations précédentes restent valables, avec la précision que les déformations plastique de compression et de traction se développent en même temps. Ce cas dit «multi critère» est du reste traité dans [bib4]. Nous nous contenterons ici de traiter le cas où \((\sigma ,A)\) est au sommet d’un cône, et nous choisirons le cas le plus fréquent du sommet du cône de traction, sachant que le cas du sommet du cône de compression se traite exactement de la même façon.
Les critères sont réécrits en utilisant les variables \({\sigma}^{\mathrm{eq}}\) et \({\sigma}_{H}\) , plus pratiques dans les développement analytiques.
\({f}_{\text{trac}}(\sigma ,{A}_{t})=\frac{\sqrt{2}}{\mathrm{3d}}{\sigma}^{\text{eq}}+\frac{c}{d}{\sigma}_{H}-{f}_{t}^{'}+{A}_{t}\le 0\) 4.3.1-1
\({f}_{{}_{\text{trac}}}^{H}(\sigma ,{A}_{t})=\frac{c}{d}{\sigma}_{H}-{f}_{t}^{'}+{A}_{t}\le 0\) 4.3.1-2
Nous considérons donc un cas où:
\(\begin{array}{}{\sigma}^{\text{eq}}=0\\ \frac{c}{d}{\sigma}_{H}-{f}_{t}^{'}+{A}_{t}=0\end{array}\rbrace\) 4.3.1-3
En partant de [ éq 4.1- 4.1-4 ], nous allons calculer la dissipation plastique comme étant le maximum de \({\dot{\varepsilon}}^{p}{\sigma}^{\text{*}}+\dot{\alpha}{A}^{\text{*}}\) pour tous les couples \({\sigma}^{\text{*}},{A}^{\text{*}}\in {C}_{(\sigma ,A)}\)
\({D}^{p}=\underset{{\sigma}^{\text{*}},{A}^{\text{*}}\in {C}_{(\sigma ,A)}}{\mathrm{Max}}({\dot{\varepsilon}}^{p}{\sigma}^{\text{*}}+\dot{\alpha}{A}^{\text{*}})\) 4.3.1-4
En écrivant alors que ce maximum est fini et atteint quand \({\sigma}^{\text{*}}=\sigma\) et \({A}^{\text{*}}=A\) , nous trouverons des conditions sur \({\dot{\varepsilon}}^{p}\) et \(\dot{\alpha}\) . En fait, le caractère fini suffira.
En utilisant la décomposition des tenseurs en partie isotrope et déviatoire, et la forme particulière des variables d’écrouissage, on trouve facilement:
\({\dot{\varepsilon}}^{p}{\sigma}^{\text{*}}+\dot{\alpha}{A}^{\text{*}}={\dot{\tilde{\varepsilon}}}^{p}{s}^{\text{*}}+3{\sigma}_{H}^{\text{*}}{\dot{\varepsilon}}_{H}^{p}+{\dot{{\kappa}_{t}}}^{p}{A}_{t}^{\text{*}}\) 4.3.1-5
Considérons alors l’ensemble \({\Sigma}_{1}\) des vecteurs contraintes de trace nulle et dont la contrainte équivalente de Von Mises vaut 1: \({\Sigma}_{1}=\lbrace \sigma ,{\sigma}^{\mathrm{eq}}=1,\text{trace}(\sigma )=0\rbrace\)
\((\sigma ,A)\in {C}_{(\sigma ,A)}\iff \lbrace \begin{array}{}\sigma ={\sigma}^{\text{eq}}{s}_{1}+{\sigma}_{H}I\\ {s}_{1}\in {\Sigma}_{1}\\ \frac{\sqrt{2}}{\mathrm{3d}}{\sigma}^{\text{eq}}+\frac{c}{d}{\sigma}_{H}-{f}_{t}^{'}+{A}_{t}\le 0\\ \frac{c}{d}{\sigma}_{H}-{f}_{t}^{'}+{A}_{t}\le 0\end{array}\) 4.3.1-6
En d’autres termes, la «direction» du déviateur des contraintes est quelconque pour un couple \((\sigma ,A)\in {C}_{(\sigma ,A)}\) .
On peut donc écrire:
\({D}^{p}=\underset{\underset{\underset{\lbrace \begin{array}{c}\frac{\sqrt{2}}{\mathrm{3d}}{\sigma}^{{\mathrm{eq}}^{\text{*}}}+\frac{c}{d}{\sigma}_{H}^{\text{*}}-{f}_{t}^{'}+{A}_{t}^{\text{*}}\le 0\\ \frac{c}{d}{\sigma}_{H}^{\text{*}}-{f}_{t}^{'}+{A}_{t}^{\text{*}}\le 0\end{array}}{}}{{\sigma}^{{\mathrm{eq}}^{\text{*}}},{\sigma}_{H}^{\text{*}},{A}_{t}^{\text{*}},{s}_{1}^{\text{*}}\in {\Sigma}_{1}}}{\mathrm{Max}}({\sigma}^{{\text{eq}}^{\text{*}}}\underset{{s}_{1}\in {\Sigma}_{1}}{\text{Max}}{\dot{\tilde{\varepsilon}}}^{p}{s}_{1}^{\text{*}}+3{\sigma}_{H}^{\text{*}}{\dot{\varepsilon}}_{H}^{p}+{\dot{\kappa}}_{t}^{p}{A}_{t}^{\text{*}})\) 4.3.1-7
Il est clair que le maximum de \({\dot{\tilde{\varepsilon}}}^{p}{s}_{1}^{\text{*}}\) est atteint quand \({s}_{1}^{\text{*}}\) est «parallèle» à \({\dot{\tilde{\varepsilon}}}^{p}\) et que l’on a alors: \(\underset{{s}_{1}\in {\Sigma}_{1}}{\text{Max}}{\dot{\tilde{\varepsilon}}}^{p}{s}_{1}^{\text{*}}=\frac{2}{3}{\dot{\tilde{\varepsilon}}}_{\mathrm{eq}}^{p}\) .
[éq 4.3.1-7] peut donc s’écrire:
4.3.1-8 \(\begin{array}{cccc}{D}^{p}=& \underset{\underset{\underset{\lbrace \begin{array}{c}\frac{\sqrt{2}}{\mathrm{3d}}{\sigma}^{{\mathrm{eq}}^{\text{*}}}+\frac{c}{d}{\sigma}_{H}^{\text{*}}-{f}_{t}^{'}+{A}_{t}^{\text{*}}\le 0\\ \frac{c}{d}{\sigma}_{H}^{\text{*}}-{f}_{t}^{'}+{A}_{t}^{\text{*}}\le 0\end{array}}{}}{{\sigma}^{{\mathrm{eq}}^{\text{*}}},{\sigma}_{H}^{\text{*}},{A}_{t}^{\text{*}}}}{\mathrm{Max}}(\frac{2}{3}{\dot{\tilde{{\varepsilon}_{\mathrm{eq}}}}}^{p}{\sigma}^{{\mathrm{eq}}^{\text{*}}})& +& \underset{\underset{\underset{\lbrace \begin{array}{c}\frac{\sqrt{2}}{\mathrm{3d}}{\sigma}^{{\mathrm{eq}}^{\text{*}}}+\frac{c}{d}{\sigma}_{H}^{\text{*}}-{f}_{t}^{'}+{A}_{t}^{\text{*}}\le 0\\ \frac{c}{d}{\sigma}_{H}^{\text{*}}-{f}_{t}^{'}+{A}_{t}^{\text{*}}\le 0\end{array}}{}}{{\sigma}^{{\mathrm{eq}}^{\text{*}}},{\sigma}_{H}^{\text{*}},{A}_{t}^{\text{*}}}}{\mathrm{Max}}(3{\sigma}_{H}^{\text{*}}\dot{{{\varepsilon}_{H}}^{p}})\\ & & & \\ & & +& \underset{\underset{\underset{\lbrace \begin{array}{c}\frac{\sqrt{2}}{\mathrm{3d}}{\sigma}^{{\mathrm{eq}}^{\text{*}}}+\frac{c}{d}{\sigma}_{H}^{\text{*}}-{f}_{t}^{'}+{A}_{t}^{\text{*}}\le 0\\ \frac{c}{d}{\sigma}_{H}^{\text{*}}-{f}_{t}^{'}+{A}_{t}^{\text{*}}\le 0\end{array}}{}}{{\sigma}^{{\mathrm{eq}}^{\text{*}}},{\sigma}_{H}^{\text{*}},{A}_{t}^{\text{*}}}}{\mathrm{Max}}({\dot{\kappa}}_{t}^{p}{A}_{t}^{\text{*}})\end{array}\rbrace\)
Comme \({\dot{\tilde{\varepsilon}}}_{\mathrm{eq}}^{p}\ge 0\) , on a pour le premier terme:
\(\underset{\underset{\underset{\lbrace \begin{array}{c}\frac{\sqrt{2}}{\mathrm{3d}}{\sigma}^{{\mathrm{eq}}^{\text{*}}}+\frac{c}{d}{\sigma}_{H}^{\text{*}}-{f}_{t}^{'}+{A}_{t}^{\text{*}}\le 0\\ \frac{c}{d}{\sigma}_{H}^{\text{*}}-{f}_{t}^{'}+{A}_{t}^{\text{*}}\le 0\end{array}}{}}{{\sigma}^{{\mathrm{eq}}^{\text{*}}},{\sigma}_{H}^{\text{*}},{A}_{t}^{\text{*}}}}{\mathrm{Max}}(\frac{2}{3}{\dot{\tilde{{\varepsilon}_{\mathrm{eq}}}}}^{p}{\sigma}^{{\mathrm{eq}}^{\text{*}}})=\frac{2}{3}{\dot{\tilde{{\varepsilon}_{\mathrm{eq}}}}}^{p}(\frac{-\mathrm{3d}}{\sqrt{2}}{A}_{t}^{\text{*}}+\frac{\mathrm{3d}}{\sqrt{2}}{f}_{t}^{'}\frac{\mathrm{3c}}{\sqrt{2}}{\sigma}_{H}^{\text{*}})\) 4.3.1-9
[éq 4.3.1-9] reporté dans [éq 4.3.1-8] donne:
\({D}^{p}=\sqrt{2}d{\dot{\tilde{{\varepsilon}_{\mathrm{eq}}}}}^{p}{f}_{t}^{'}+\underset{\underset{\frac{c}{d}{\sigma}_{H}^{\text{*}}-{f}_{t}^{'}+{A}_{t}^{\text{*}}\le 0}{{\sigma}_{H}^{\text{*}},{A}_{t}^{\text{*}}}}{\mathrm{Max}}({\sigma}_{H}^{\text{*}}(3{\dot{{\varepsilon}_{H}}}^{p}-\sqrt{2}c{\dot{\tilde{{\varepsilon}_{\mathrm{eq}}}}}^{p}))+\underset{\underset{\frac{c}{d}{\sigma}_{H}^{\text{*}}-{f}_{t}^{'}+{A}_{t}^{\text{*}}\le 0}{{\sigma}_{H}^{\text{*}},{A}_{t}^{\text{*}}}}{\mathrm{Max}}({A}_{t}^{\text{*}}({\dot{\kappa}}_{t}^{p}-\sqrt{2}d{\dot{\tilde{{\varepsilon}_{\mathrm{eq}}}}}^{p}))\) 4.3.1-10
Posons alors:
\(m=3{\dot{{\varepsilon}_{H}}}^{p}-\sqrt{2}c{\dot{\tilde{{\varepsilon}_{\mathrm{eq}}}}}^{p}\) , \(n={\dot{\kappa}}_{t}^{p}-\sqrt{2}d{\dot{\tilde{{\varepsilon}_{\mathrm{eq}}}}}^{p}\) et \(q=\sqrt{2}d{\dot{\tilde{{\varepsilon}_{\mathrm{eq}}}}}^{p}{f}^{'}\)
Avec ces notations, [éq 4.3.1-10] devient:
\({D}^{p}=q+\underset{\underset{\frac{c}{d}{\sigma}_{H}^{\text{*}}-{f}_{t}^{'}+{A}_{t}^{\text{*}}\le 0}{{\sigma}_{H}^{\text{*}},{A}_{t}^{\text{*}}}}{\mathrm{Max}}(m{\sigma}_{H}^{\text{*}}+n{A}_{t}^{\text{*}})\) 4.3.1-11
Il s’agit d’un problème de type «simplexe». Le domaine de \({\sigma}_{H}^{\text{*}},{A}_{t}^{\text{*}}\) est représenté sur la [Figure4.3.1‑a].

Figure 4.3.1-a
Comme le domaine \({\sigma}_{H}^{\text{*}},{A}_{t}^{\text{*}}\) s’étend vers \(-\infty\) à la fois pour \({\sigma}_{H}^{\text{*}}\) et \({A}_{t}^{\text{*}}\) , pour que \({D}^{p}\) soit fini, il faut que \(m\) et \(n\) soient positifs. Le maximum de \(m{\sigma}_{H}^{\text{*}}+n{A}_{t}^{\text{*}}\) est atteint pour un couple \({\sigma}_{H}^{\text{*}},{A}_{t}^{\text{*}}\) situé sur le bord du domaine de \({\sigma}_{H}^{\text{*}},{A}_{t}^{\text{*}}\) .
On a alors: \({D}^{p}=q+n{f}_{t}^{'}+\underset{{\sigma}_{H}^{\text{*}}}{\mathrm{Max}}({\sigma}_{H}^{\text{*}}(m-n\frac{c}{d}))\)
Pour que \({D}^{p}\) soit fini, il faut que:
\(m=n\frac{c}{d}\)
Reprenant les définitions de \(m\) et \(n\) , cette relation donne:
\(3\dot{{\varepsilon}_{H}^{p}}=\frac{c}{d}{\dot{\kappa}}_{t}^{p}\) éq 4.3.1-12
Par ailleurs, les contraintes \(m\ge 0\) et \(n\ge 0\) donnent:
\(3\dot{{\varepsilon}_{H}^{p}}\ge \sqrt{2}c{\dot{\tilde{\varepsilon}}}_{{}^{\text{eq}}}^{p}\) éq 4.3.1-13
et
\({\dot{\kappa}}_{t}^{p}\ge \sqrt{2}d{\dot{\tilde{\varepsilon}}}_{{}^{\text{eq}}}^{p}\) éq 4.3.1-14
ces deux dernières inégalités étant équivalentes du fait de [éq 4.3.1-11].
Les équations [éq 4.3.1-11] et [éq 4.3.1-12] définissent l’écoulement plastique au sommet d’un des cônes du domaine de réversibilité.
Démonstration par le travail plastique#
Le point de départ est de considérer que par rapport aux développements faits en des points réguliers, ce sont essentiellement les relations [éq 4.2-1] et [éq 4.2-2], dites règles de normalité, qui ne peuvent plus être écrites. Or la relation [éq 4.2-1] implique l’égalité \({\dot{\kappa}}_{t}^{p}{f}_{t}({\kappa}_{t}^{p})=\sigma \dot{{\varepsilon}^{p}}\) , qui peut, elle, être maintenue.
Nous partirons donc de l’équation:
\({\dot{\kappa}}_{t}^{p}{f}_{t}({\kappa}_{t}^{p})=\sigma \dot{{\varepsilon}^{p}}\) éq 4.3.2-1
Nous utilisons la décomposition en partie isotrope et déviatoire des tenseurs et trouvons:
\({\dot{\kappa}}_{t}^{p}{f}_{t}({\kappa}_{t}^{p})=\dot{{\tilde{\varepsilon}}^{p}}s+3{\sigma}_{H}\dot{{\varepsilon}_{H}}\) éq 4.3.2-2
Au sommet du cône de traction, on a les relations [éq 4.3.1-3], qui, portées dans [éq 4.3.2-2] donnent, en utilisant également [ éq 3.5- 3.5-2 ]:
\({\dot{\kappa}}_{t}^{p}{f}_{t}({\kappa}_{t}^{p})=3\frac{d}{c}{f}_{t}({\kappa}_{t}^{p})\dot{{\varepsilon}_{H}}\) éq 4.3.2-3
Et on retrouve donc la relation [éq 4.3.1-12]: . \(3\dot{{\varepsilon}_{H}}=\frac{c}{d}{\dot{\kappa}}_{t}^{p}\)
Ensemble des équations de comportement (résumé)#
On note \(H\) la matrice d’élasticité:
\(H=\left[\begin{array}{cccccc}\lambda +\mathrm{2\mu }& \lambda & \lambda & 0& 0& 0\\ \lambda & \lambda +\mathrm{2\mu }& \lambda & 0& 0& 0\\ \lambda & \lambda & \lambda +\mathrm{2\mu }& 0& 0& 0\\ 0& 0& 0& \mathrm{2\mu }& 0& 0\\ 0& 0& 0& 0& \mathrm{2\mu }& 0\\ 0& 0& 0& 0& 0& \mathrm{2\mu }\end{array}\right]\)
Avec:
\(\lambda =\mathrm{\nu }\frac{E}{(1+\mathrm{\nu })(1-\mathrm{2\nu })}\) et \(\mu =\frac{E}{2(1+\mathrm{\nu })}\) , et \(K=\frac{\mathrm{3\lambda }+\mathrm{2\mu }}{3}\)
Les relations contraintes déformations s’écrivent finalement:
\(\sigma =H(\varepsilon -{\varepsilon}_{c}^{p}-{\varepsilon}_{t}^{p})\) éq 4.4‑ 4.4-1
Pour un point régulier du cône de compression:
\({f}_{\mathrm{comp}}(\sigma ,{A}_{c})=\frac{\sqrt{2}}{\mathrm{3b}}{\sigma}^{\mathrm{eq}}+\frac{a}{b}{\sigma}_{H}-\phi {f}_{c}^{'}+{A}_{c}\le 0\) éq 4.4‑ 4.4-2
\({\dot{\kappa}}_{c}^{p}{f}_{\mathrm{comp}}=0;{\dot{\varepsilon}}_{c}^{p}={\dot{\kappa}}_{c}^{p}\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma }\) éq 4.4‑ 4.4-3
Pour un point régulier du cône de traction:
\({f}_{\mathrm{trac}}(\sigma ,{A}_{t})=\frac{\sqrt{2}}{\mathrm{3d}}{\sigma}^{\mathrm{eq}}+\frac{c}{d}{\sigma}_{H}-\phi {f}_{t}^{'}+{A}_{t}\le 0\) éq 4.4‑ 4.4-4
\({\dot{\kappa}}_{t}^{p}{f}_{\mathrm{trac}}=0;{\dot{\varepsilon}}_{t}^{p}={\dot{\kappa}}_{t}^{p}\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma }\) éq 4.4‑5
Pour un point au sommet du cône de compression:
\(s=0\) éq 4.4‑ 6
\({f}_{{}_{\text{comp}}}^{H}(\sigma ,{A}_{c})=\frac{a}{b}{\sigma}_{H}-\phi {f}_{c}^{'}+{A}_{c}=0\) éq 4.4‑7
\(3{\dot{\varepsilon}}_{cH}^{p}=\frac{a}{b}{\dot{\kappa}}_{c}^{p}\) éq 4.4‑8
\(3{\dot{\varepsilon}}_{cH}^{p}\ge \sqrt{2}a{\dot{\tilde{\varepsilon}}}_{c\mathrm{eq}}^{p}\) éq 4.4‑ 9
Pour un point au sommet du cône de traction:
\(s=0\) éq 4.4‑ 10
\({f}_{{}_{\text{trac}}}^{H}(\sigma ,{A}_{t})=\frac{c}{d}{\sigma}_{H}-{f}_{t}^{'}+{A}_{t}=0\) éq 4.4‑11
\(3{\dot{\varepsilon}}_{tH}^{p}=\frac{c}{d}{\dot{\kappa}}_{t}^{p}\) éq 4.4‑ 12
\(3{\dot{\varepsilon}}_{tH}^{p}\ge \sqrt{2}c{\dot{\tilde{\varepsilon}}}_{t\mathrm{eq}}^{p}\) éq 4.4‑ 13
Intégration numérique de la loi de comportement#
Le problème global et le problème local : rappels#
Pour une structure donnée (géométrie et matériau), et pour un chargement donné, les champs de déplacement, contrainte et variables internes se trouvent en résolvant un ensemble d’équations aux dérivées partielles non linéaire formées à partir des équations d’équilibre et des lois de comportement. Le document [bib5] présente l’algorithme dont nous donnons ici un résumé:
\({\text{u}}_{0}\) et \({\sigma}_{0}\) connu
Boucle instants \({t}_{i}\) : chargement \({\text{L}}_{i}=\text{L}({t}_{i})\)
\({\text{u}}_{i-1}\) connu; calcul de la prédiction \(\Delta {\text{u}}_{i}^{0}\)
Itérations d’équilibre de Newton n
\({\text{u}}_{i}^{n}\) connu; \(\Delta {\text{u}}_{i}^{n}={\text{u}}_{i}^{n}-{\text{u}}_{i-1}\)
Boucle éléments el
Boucle points de gauss g
calcul \(\Delta {\varepsilon}_{{g}_{i}}^{{\mathrm{el}}^{n}}={\varepsilon}_{g}^{\mathrm{el}}(\Delta {\text{u}}_{i}^{n})\)
loi de comportement :
calcul de: \({\sigma}_{{g}_{i}}^{{\mathrm{el}}^{n}}\) et \({\alpha}_{{g}_{i}}^{{\mathrm{el}}^{n}}\) à partir de \({\sigma}_{{g}_{i-1}}^{\mathrm{el}}\) , \({\alpha}_{{g}_{i-1}}^{\mathrm{el}}\) et \(\Delta {\varepsilon}_{{g}_{i}}^{{\mathrm{el}}^{n}}\)
calcul de \(\frac{\partial {\sigma}_{{g}_{i}}^{{\mathrm{el}}^{n}}}{\partial \Delta {\varepsilon}_{{g}_{i}}^{{\mathrm{el}}^{n}}}\) (selon option)
Accumulation dans vecteurs et matrices assemblés :
Accumulation de \({Q}_{g}^{{T}^{\mathrm{el}}}.{\sigma}_{{g}_{i}}^{{\mathrm{el}}^{n}}\) dans \({Q}^{T}.{\sigma}_{i}^{n}\)
Accumulation de calcul de \({Q}_{g}^{{T}^{\mathrm{el}}}\frac{\partial {\sigma}_{{g}_{i}}^{{\mathrm{el}}^{n}}}{\partial \Delta {\varepsilon}_{{g}_{i}}^{{\mathrm{el}}^{n}}}{Q}_{g}^{\mathrm{el}}\) dans \({K}_{i}^{n}\) (selon option)
Calcul de \(\delta {\text{u}}_{i}^{n}\) par:
\({K}_{i}^{n}.\delta {\text{u}}_{i}^{n}=-{Q}^{T}.{\sigma}_{i}^{n}+{L}_{i}\)
itération de recherche linéaire pour déterminer \(\rho\)
Actualisation :
\(\Delta {\text{u}}_{i}^{n+1}=\Delta {\text{u}}_{i}^{n}+\rho \delta {\text{u}}_{i}^{n}\)
SI test convergence OK
fin Newton: pas de temps suivant i = i+1
Sinon
n = n+1
Le calcul des contraintes et variables internes \({\alpha}_{{g}_{i}}^{{\mathrm{el}}^{n}}\) , \({\sigma}_{{g}_{i}}^{{\mathrm{el}}^{n}}\) à l’itération de Newton \(n\) et au temps \({t}_{i}\) à partir des contraintes et variables internes \({\sigma}_{{g}_{i-1}}^{\mathrm{el}}\) , \({\alpha}_{{g}_{i-1}}^{\mathrm{el}}\) au temps \({t}_{i-1}\) et de la valeur et \(\Delta {\varepsilon}_{{g}_{i}}^{{\mathrm{el}}^{n}}\) de l’accroissement de déformation dans l’intervalle de temps estimé à l’itération de Newton \(n\) consiste à intégrer les équations [éq 4.4-1], [éq 4.4-2] à [éq 4.4-5] ou [éq 4.4-6] à [éq 4.4-9] ou [éq 4.4-10] à [éq4.4-13] selon les cas avec les conditions initiales:
\(\alpha ({t}_{i-1})={\alpha}_{{g}_{i-1}}^{\mathrm{el}}\) éq 5.1‑ 5.1-1
\(\sigma ({t}_{i-1})={\sigma}_{{g}_{i-1}}^{\mathrm{el}}\) éq 5.1‑ 5.1-2
\({\varepsilon}^{p}({t}_{i-1})={\varepsilon}_{{g}_{i-1}}^{{p}^{\mathrm{el}}}\) éq 5.1‑ 5.1-3
Avec la condition de chargement en déformation imposée:
\(\varepsilon ({t}_{i})={\varepsilon}_{{g}_{i}}^{{\mathrm{el}}^{n}}\) éq 5.1‑ 5.1-4
Le résultat de cette intégration fournira:
\(\begin{array}{c}{\sigma}_{{g}_{i}}^{{\mathrm{el}}^{n}}=\sigma ({t}_{i})\\ {\varepsilon}_{{g}_{i}}^{{p}^{{\mathrm{el}}^{n}}}={\varepsilon}^{p}({t}_{i})\\ {\alpha}_{{g}_{i}}^{{\mathrm{el}}^{n}}=\alpha ({t}_{i})\end{array}\)
L’objet de ce chapitre est de présenter l’intégration numérique de ces équations. Il s’agit d’un système d’équations différentielles non linéaires que nous résolvons par une méthode d’Euler implicite. A partir de maintenant, les quantité au début du pas de temps (connues) seront notés avec un indice , alors que les inconnues en fin de pas de temps (toutes inconnues sauf \(\varepsilon ={\varepsilon}_{{g}_{i}}^{{\mathrm{el}}^{n}}\) ) seront notées sans indice. Pour une quantité quelconque \(a\) on note \(\Deltaa =a-{a}^{-}\) .
On commence toujours par calculer une solution élastique \({\sigma}^{e}\) , en supposant qu’il n’y a pas d’évolution des déformations plastiques et des variables internes. Si au moins un des critères est violé par cette solution élastique, il y a lieu de calculer des écoulements plastiques. Il faut alors distinguer les cas réguliers pour lesquels la solution \(\sigma\) est sur la partie régulière d’un des cônes ou à leur intersection des cas dits singuliers où la solutio \(\sigma\) nest au sommet d’un des deux cônes. La logique permettant d’examiner et de choisir ces différents cas, et l’algorithme qui en découle sont relativement complexes. Nous présentons donc en premier le traitement de chacun des cas et expliquons leur enchaînement postérieurement, dans le chapitre [§ 5.7 ].
Traitement numérique du cas régulier.#
On ne présente en détail que le cas où se développent à la fois des déformations plastiques en traction et en compression et où donc la solution \(\sigma\) appartient à l’intersection des deux cônes. Notons toutefois que, même si \({\sigma}^{e}\) viole à la fois les deux critères, pour autant la solution finale \(\sigma\) peut très bien n’appartenir finalement qu’à un des cônes écroui. On est donc amené à rechercher des soldions dont on postule qu’elles appartiennent à un des deux cônes ou aux deux. Le cas ou elle appartient à un seul des deux cônes se déduit facilement du cas plus général présenté ici. Les équations que nous avons à résoudre sont finalement:
\({s}^{e}=\frac{\mu}{{\mu}^{-}}{s}^{-}+2\mu \Delta \tilde{\varepsilon}\) éq 5.2‑ 5.2-1
\({\sigma}_{{H}^{e}}=\frac{K}{{K}^{-}}{\sigma}_{{H}^{-}}+{\mathrm{3K\Delta \varepsilon }}_{H}\) éq 5.2‑ 5.2-2
\(s={s}^{e}-2\mu (\Delta {\tilde{\varepsilon}}_{c}^{p}+\Delta {\tilde{\varepsilon}}_{t}^{p})\) éq 5.2‑ 5.2-3
\({\sigma}_{H}={\sigma}_{H}^{e}-\mathrm{3K}({\mathrm{\Delta \varepsilon }}_{{H}_{c}}^{p}+{\mathrm{\Delta \varepsilon }}_{{H}_{t}}^{p})\) éq 5.2‑ 5.2-4
\({f}_{\mathrm{comp}}(\sigma ,{\kappa}_{c}^{p})=\frac{\sqrt{2}}{\mathrm{3b}}{\sigma}^{\mathrm{eq}}+\frac{a}{b}{\sigma}_{H}-{f}_{c}({\kappa}_{c}^{p})=0\) éq 5.2‑ 5.2-5
\(\Delta {\varepsilon}_{c}^{p}=\Delta {\kappa}_{c}^{p}\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma }\) éq 5.2‑ 5.2-6
\({f}_{\mathrm{trac}}(\sigma ,{\kappa}_{t}^{p})=\frac{\sqrt{2}}{\mathrm{3d}}{\sigma}^{\mathrm{eq}}+\frac{c}{d}{\sigma}_{H}-{f}_{t}({\kappa}_{t}^{p})=0\) éq 5.2‑ 5.2-7
\(\Delta {\varepsilon}_{t}^{p}=\Delta {\kappa}_{t}^{p}\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma }\) éq 5.2‑ 5.2-8
En prenant les parties isotropes et déviatoriques des déformations plastiques, les équations [éq 5.2-6] et [ éq 5.2- 5.2-8 ] donnent:
\(\Delta {\tilde{\varepsilon}}_{c}^{p}=\frac{\Delta {\kappa}_{c}^{p}}{\sqrt{2}b}\frac{s}{{\sigma}^{\mathrm{eq}}}\) éq 5.2‑ 5.2-9
\(\Delta {\varepsilon}_{{H}_{c}}^{p}=\Delta {\kappa}_{c}^{p}\frac{a}{\mathrm{3b}}\) éq 5.2‑ 5.2-10
\(\Delta {\tilde{\varepsilon}}_{t}^{p}=\frac{\Delta {\kappa}_{t}^{p}}{\sqrt{2}d}\frac{s}{{\sigma}^{\mathrm{eq}}}\) éq 5.2‑ 5.2-11
\(\Delta {\varepsilon}_{{H}_{t}}^{p}=\Delta {\kappa}_{t}^{p}\frac{c}{\mathrm{3d}}\) éq 5.2‑ 5.2-12
En reportant [éq 5.2-9] et[éq 5.2-11] dans [ éq 5.2- 5.2-3 ], on trouve:
\(s={s}^{e}-2\mu (\frac{\Delta {\kappa}_{c}^{p}}{\sqrt{2}b}+\frac{\Delta {\kappa}_{t}^{p}}{\sqrt{2}d})\frac{s}{{\sigma}^{\mathrm{eq}}}\) éq 5.2‑ 5.2-13
qui montre que \(\text{s}\) est parallèle à \({\text{s}}^{e}\) d’où l’on déduit:
\(\frac{s}{{\sigma}^{\text{eq}}}=\frac{{\text{s}}^{e}}{{\sigma}^{{e}^{\mathrm{eq}}}}\) éq 5.2‑ 5.2-14
En reportant [éq 5.2-14] dans [éq 5.2-9] et [éq 5.2-11] on trouve:
\(\Delta {\tilde{\varepsilon}}_{c}^{p}=\frac{\Delta {\kappa}_{c}^{p}}{\sqrt{2}b}\frac{{s}^{e}}{{\sigma}^{{e}^{\mathrm{eq}}}}\) éq 5.2‑5.2-15
\(\Delta {\tilde{\varepsilon}}_{t}^{p}=\frac{\Delta {\kappa}_{t}^{p}}{\sqrt{2}d}\frac{{s}^{e}}{{\sigma}^{{e}^{\mathrm{eq}}}}\) éq 5.2‑5.2-16
On reporte alors [ éq 5.2- 5.2-15 ] et [ éq 5.2- 5.2-16 ] dans [ éq 5.2- 5.2-3 ] et [ éq 5.2- 5.2-4 ], et on exprime les critères [éq5.2-5] et [ éq 5.2- 5.2-7 ] avec ces nouveaux résultats. Cela conduit à deux équations ayant comme inconnues \(\Delta {\kappa}_{c}^{p}\) et \(\Delta {\kappa}_{t}^{p}\) :
\(\frac{\sqrt{2}}{\mathrm{3b}}{\sigma}^{{e}^{\text{eq}}}+\frac{a}{b}{\sigma}_{H}^{e}-{\mathrm{\Delta \kappa }}_{c}^{p}(\frac{\mathrm{2\mu }}{{\mathrm{3b}}^{2}}+\frac{{\text{Ka}}^{2}}{{b}^{2}})-{\mathrm{\Delta \kappa }}_{t}^{p}(\frac{\mathrm{2\mu }}{3\text{bd}}+\frac{\text{Kac}}{\text{bd}})-{f}_{c}({\kappa}_{c}^{{p}^{-}}+{\mathrm{\Delta \kappa }}_{c}^{p})=0\) éq 5.2‑5.2-17
\(\frac{\sqrt{2}}{\mathrm{3d}}{\sigma}^{{e}^{\text{eq}}}+\frac{c}{d}{\sigma}_{H}^{e}-{\mathrm{\Delta \kappa }}_{c}^{p}(\frac{\mathrm{2\mu }}{3\text{bd}}+\frac{\text{Kac}}{\text{bd}})-{\mathrm{\Delta \kappa }}_{t}^{p}(\frac{\mathrm{2\mu }}{{\mathrm{3d}}^{2}}+\frac{{\text{Kc}}^{2}}{{d}^{2}})-{f}_{t}({\kappa}_{t}^{{p}^{-}}+{\mathrm{\Delta \kappa }}_{t}^{p})=0\) éq 5.2‑5.2-18
C’est ce système de deux équations à deux inconnues qu’il faut finalement résoudre. Dans le cas où les fonctions \({f}_{c}\) et \({f}_{t}\) sont linéaires, c’est à dire dans le cas où on est en régime post-pic linéaire en compression comme en traction, il s’agit d’un système linéaire qui sera donc résolu en une itération. Dans le cas, soit du régime pré-pic en compression (qui est toujours non linéaire), soit de modélisations à régimes post pic non linéaires, le système [ éq 5.2- 5.2-17 ] et [ éq 5.2- 5.2-18 ] est résolu par une méthode de Newton:
On note \({f}_{\mathrm{comp}}^{\text{*}}(\Delta {\kappa}_{c}^{p},\Delta {\kappa}_{t}^{p})\) le critère de compression considéré comme fonction des seules variables \(\Delta {\kappa}_{c}^{p}\) et \(\Delta {\kappa}_{t}^{p}\) , de même pour la traction:
\({f}_{\text{comp}}^{\text{*}}(\Delta {\kappa}_{c}^{p},\Delta {\kappa}_{t}^{p})=\frac{\sqrt{2}}{\mathrm{3b}}{\sigma}^{{e}^{\text{eq}}}+\frac{a}{b}{\sigma}_{H}^{e}-\Delta {\kappa}_{c}^{p}(\frac{2\mu }{{\mathrm{3b}}^{2}}+\frac{{\text{Ka}}^{2}}{{b}^{2}})-\Delta {\kappa}_{t}^{p}(\frac{2\mu }{3\text{bd}}+\frac{\text{Kac}}{\text{bd}})-{f}_{c}({\kappa}_{c}^{{p}^{-}}+\Delta {\kappa}_{c}^{p})\)
\({f}_{\text{trac}}^{\text{*}}(\Delta {\kappa}_{c}^{p},\Delta {\kappa}_{t}^{p})=\frac{\sqrt{2}}{3d}{\sigma}^{{e}^{\text{eq}}}+\frac{c}{d}{\sigma}_{H}^{e}-\Delta {\kappa}_{c}^{p}(\frac{2\mu }{3bd}+\frac{\text{K}ac}{bd})-\Delta {\kappa}_{t}^{p}(\frac{2\mu }{3{d}^{2}}+\frac{K{c}^{2}}{{\text{d}}^{2}})-{f}_{t}({\kappa}_{t}^{{p}^{-}}+\Delta {\kappa}_{t}^{p})\)
La ième itération de Newton pour système [ éq 5.2- 5.2-17 ] - [ éq 5.2- 5.2-18 ] est:
\({\left\lbrace \begin{array}{c}\Delta {\kappa}_{c}^{p}\\ \Delta {\kappa}_{t}^{p}\end{array}\right\rbrace }^{i+1}={\left\lbrace \begin{array}{c}\Delta {\kappa}_{c}^{p}\\ \Delta {\kappa}_{t}^{p}\end{array}\right\rbrace }^{i}-{J}_{i}^{-1}{\left\lbrace \begin{array}{c}{f}_{\mathrm{comp}}^{\text{*}}(\Delta {\kappa}_{c}^{p},\Delta {\kappa}_{t}^{p})\\ {f}_{\mathrm{tracp}}^{\text{*}}(\Delta {\kappa}_{c}^{p},\Delta {\kappa}_{t}^{p})\end{array}\right\rbrace }^{i}\)
Le jacobien \({J}_{i}\) vaut:
\({J}_{i}=\left[\begin{array}{cc}\frac{\partial {f}_{\mathrm{comp}}^{\text{*}}}{\Delta {\kappa}_{c}^{p}}& \frac{\partial {f}_{\mathrm{comp}}^{\text{*}}}{\Delta {\kappa}_{t}^{p}}\\ \frac{\partial {f}_{\mathrm{trac}}^{\text{*}}}{\Delta {\kappa}_{c}^{p}}& \frac{\partial {f}_{\mathrm{trac}}^{\text{*}}}{\Delta {\kappa}_{t}^{p}}\end{array}\right]\)
Avec:
\(\frac{\partial {f}_{\mathrm{comp}}^{\text{*}}}{\Delta {\kappa}_{c}^{p}}=-(\frac{2\mu }{{\mathrm{3b}}^{2}}+\frac{K{a}^{2}}{{b}^{2}})-\frac{\partial {f}_{c}({\kappa}_{c}^{{p}^{-}}+\Delta {\kappa}_{c}^{p})}{\partial \Delta {\kappa}_{c}^{p}}\)
\(\frac{\partial {f}_{\mathrm{comp}}^{\text{*}}}{\partial \Delta {\kappa}_{t}^{p}}=-(\frac{2\mu }{\mathrm{3bd}}+\frac{K\mathrm{ac}}{\mathrm{bd}})\)
\(\frac{\partial {f}_{\mathrm{trac}}^{\text{*}}}{\partial \Delta {\kappa}_{c}^{p}}=-(\frac{2\mu }{\mathrm{3bd}}+\frac{K\mathrm{ac}}{\mathrm{bd}})\)
\(\frac{\partial {f}_{\text{trac}}^{\text{*}}}{\partial \Delta {\kappa}_{t}^{p}}=-(\frac{2\mu }{{\mathrm{3d}}^{2}}+\frac{{\text{Kc}}^{2}}{{d}^{2}})-\frac{\partial {f}_{t}({\kappa}_{t}^{{p}^{-}}+\Delta {\kappa}_{t}^{p})}{\partial \Delta {\kappa}_{t}^{p}}\)
Le Jacobien initial du système se déduit des valeurs des dérivées en \(\Delta {\kappa}_{c}^{p}=0\) et \({\mathrm{\Delta \kappa }}_{t}^{p}=0\) , ce qui revient à résoudre le système non linéaire en partant de la solution nulle. Les non linéarités sont introduites par les courbes d’adoucissement. Dans la partie post-pic, lorsqu’elles sont linéaires, la convergence se fait en une itération. Lorsqu’elles sont non linéaires, la convergence ne nécessite que quelques itérations. Partir de la solution nulle ne pose donc pas de problème de convergence. Cela revient à partir de la linéarisation des critères au voisinage de la prédiction élastique.
Existence d’une solution et condition d’applicabilité#
Nous rappelons que la solution du problème [ éq 5.2- 5.2-17 ] et [ éq 5.2- 5.2-18 ] doit vérifier les conditions [éq4.2-3] et donc entre autres la positivité des accroissements des multiplicateurs plastiques.
\(\Delta {\kappa}_{c}^{p}\ge 0\) éq 5.3‑ 5.3-1
\(\Delta {\kappa}_{t}^{p}\ge 0\) éq 5.3‑ 5.3-2
Supposons que nous soyons dans un cas de comportement post pic linéaire en traction comme en compression et appelons respectivement

et \({h}_{t}\) les pentes des parties post pic. Les accroissements des multiplicateurs plastiques sont obtenus en résolvant le système linéaire:
\(\left[\begin{array}{cc}\frac{2\mu }{{\mathrm{3b}}^{2}}+\frac{{\text{Ka}}^{2}}{{b}^{2}}+{h}_{c}& \frac{2\mu }{3\text{bd}}+\frac{\text{Kac}}{\text{bd}}\\ \frac{2\mu }{3\text{bd}}+\frac{\text{Kac}}{\text{bd}}& \frac{2\mu }{{\mathrm{3d}}^{2}}+\frac{{\text{Kc}}^{2}}{{d}^{2}}+{h}_{t}\end{array}\right](\begin{array}{c}\begin{array}{}\Delta {\kappa}_{c}^{p}\\ \end{array}\\ \Delta {\kappa}_{t}^{p}\end{array})=(\begin{array}{c}\frac{\sqrt{2}}{\mathrm{3b}}{\sigma}^{{e}^{\text{eq}}}+\frac{a}{b}{\sigma}_{H}^{e}-{f}_{c}({\kappa}_{c}^{{p}^{-}})\\ \frac{\sqrt{2}}{\mathrm{3d}}{\sigma}^{{e}^{\text{eq}}}+\frac{c}{d}{\sigma}_{H}^{e}-{f}_{t}({\kappa}_{t}^{{p}^{-}})\end{array})\) éq 5.3‑ 5.3-3
Puisque les critères de traction et de compression ont été activés en traction comme en compression, le second membre de ce système est positif. Mais rien n’assure pour autant que la solution de [éq5.3‑3] sera positive.
Si l’on pose:
\(\mathrm{HTC}=\left[\begin{array}{c}\underline{\begin{array}{cc}\frac{\mathrm{2\mu }}{{\mathrm{3b}}^{2}}+\frac{{\text{Ka}}^{2}}{{b}^{2}}+{h}_{c}& \mid \frac{\mathrm{2\mu }}{3\text{bd}}+\frac{\text{Kac}}{\text{bd}}\end{array}}\\ \begin{array}{cc}\frac{\mathrm{2\mu }}{3\text{bd}}+\frac{\text{Kac}}{\text{bd}}& \mid \frac{\mathrm{2\mu }}{{\mathrm{3d}}^{2}}+\frac{{\text{Kc}}^{2}}{{d}^{2}}+{h}_{t}\end{array}\end{array}\right]\) é q 5.3‑ 5.3-4
On a:
\(\left\lbrace \begin{array}{c}\Delta {\kappa}_{c}^{p}\\ \Delta {\kappa}_{t}^{p}\end{array}\right\rbrace ={\mathrm{HTC}}^{\text{-1}}(\begin{array}{c}\frac{\sqrt{2}}{\mathrm{3b}}{\sigma}^{{e}^{\text{eq}}}+\frac{a}{b}{\sigma}_{H}^{e}-{f}_{c}({\kappa}_{c}^{{p}^{-}})\\ \frac{\sqrt{2}}{\mathrm{3d}}{\sigma}^{{e}^{\text{eq}}}+\frac{c}{d}{\sigma}_{H}^{e}-{f}_{t}({\kappa}_{t}^{{p}^{-}})\end{array})\) éq 5.3‑ 5.3-5
Avec:
\(∣\mathrm{HTC}∣=3\frac{{h}_{t}}{{\beta }^{2}}(\mathrm{3K}+\mu )-6\frac{{h}_{t}}{\beta }+{h}_{c}{h}_{t}+\frac{9}{4}{h}_{c}K+9{h}_{t}K+\frac{3\mu }{4}({h}_{c}+16{h}_{t}+\mathrm{9K})\) éq 5.3‑ 5.3-6
\({\text{HTC}}^{-1}=\frac{1}{\mid \text{HTC}\mid }\left[\begin{array}{cc}{h}_{t}+\frac{3}{4}(\mathrm{3K}+\mu )& \frac{\mathrm{9K}}{2\beta }-\frac{\mathrm{9K}}{2}+\frac{3\mu }{2\beta }-3\mu \\ \frac{\mathrm{9K}}{2\beta }-\frac{\mathrm{9K}}{2}+\frac{3\mu }{2\beta }-3\mu & {h}_{c}+\mathrm{9K}-18\frac{K}{\beta }+12\mu \frac{(\beta -1)}{\beta }\end{array}\right]\) éq 5.3‑ 5.3-7
On voit que les conditions de positivité [ éq 5.3- 5.3-1 ] et [ éq 5.3- 5.3-2 ] conduisent à des relations relativement compliquées. Si la solution du problème [ éq 5.2- 5.2-17 ] et [ éq 5.2- 5.2-18 ] ne vérifie pas les conditions de positivité [ éq 5.3- 5.3-1 ] et [ éq 5.3- 5.3-2 ], cela peut correspondre soit au fait que les coefficients \({h}_{c}\) et \({h}_{t}\) sont tels qu’il n’y a pas de solution positive (cela correspondrait à un snap-back dans un diagramme \((\sigma ,K)\) ), soit au fait que la solution n’active finalement qu’un des deux critères.
Examinons le cas plus simple d’un seul critère activé. Supposons pour fixer les notations que le seul critère activé soit le critère de traction.
On doit avoir:
\(\Delta {\kappa}_{t}^{p}(\frac{2\mu }{{\mathrm{3d}}^{2}}+\frac{{\mathrm{Kc}}^{2}}{{d}^{2}}+{h}_{t})=\frac{\sqrt{2}}{\mathrm{3d}}{\sigma}^{{e}^{\mathrm{eq}}}+\frac{c}{d}{\sigma}_{H}^{e}-{f}_{t}({\kappa}_{t}^{{p}^{\text{\_}}})\) éq 5.3‑ 5.3-8
On voit réapparaître la condition dite d’applicabilité:
\((\frac{2\mu }{{\mathrm{3d}}^{2}}+\frac{{\mathrm{Kc}}^{2}}{{d}^{2}}+{h}_{t})>0\) éq 5.3‑ 5.3-9
Cette condition est la généralisation de la condition \(-h<E\) présentée au paragraphe [§ 3.5.2.1 ] dans un cas particulier de sollicitation uni axiale.
On retiendra donc la stratégie suivante:
Si \(\frac{\sqrt{2}}{\mathrm{3b}}{\sigma}^{{e}^{\mathrm{eq}}}+\frac{a}{b}{\sigma}_{H}^{e}-{f}_{c}({\kappa}_{c}^{{p}^{\text{\_}}})>0\) et \(\frac{\sqrt{2}}{\mathrm{3b}}{\sigma}^{{e}^{\mathrm{eq}}}+\frac{a}{b}{\sigma}_{H}^{e}-{f}_{c}({\kappa}_{c}^{{p}^{\text{\_}}})>0\)
Activation a priori des deux critères: résolution problème [ éq 5.2- 5.2-17 ] et [ éq 5.2- 5.2-18 ]
Si non convergence ou si non vérification conditions de positivité [ éq 5.3- 5.3-1 ] et [ éq 5.3- 5.3-2 ]
Recherche solution avec un seul critère activé
Si non convergence ou non vérification condition positivité
Arrêt sur diagnostique de non vérification de condition d’applicabilité du type [ éq 5.3- 5.3-9 ]
Traitement des cas non réguliers#
Dans ce paragraphe, nous décrivons le traitement discret des équations correspondant à la projection au sommet du cône de traction, [éq 4.4-10] à [éq 4.4-13], sachant que la projection au sommet du cône de compression se fait de la même façon. Les équations [éq 4.4-10] et [éq 4.4-12] définissent l’écoulement plastique dans ce cas, alors que l’équation [éq 4.4-13] est une condition d’acceptabilité de la projection au sommet du cône.
Calcul des contraintes et déformations plastiques#
Les formes discrètes de [éq 4.4-10] à [éq 4.4-13], sont:
\(s=0\) éq 5.4.1-1
\({\sigma}_{H}=\frac{d}{c}{f}_{t}({\kappa}_{t}^{{p}^{\text{\_}}}+\Delta {\kappa}_{t}^{p})\) éq 5.4.1-2
\(3\Delta {\varepsilon}_{{t}_{H}}^{p}=\frac{c}{d}\Delta {\kappa}_{t}^{p}\) éq 5.4.1-3
La relation [ éq 5.2- 5.2-4 ] établie dans le cas régulier est toujours valable, on l’utilise conjointement à [éq5.4.1-3] dans [éq 5.4.1-1] et on obtient:
\({\sigma}_{H}^{e}-\frac{c}{d}K\Delta {\kappa}_{t}^{p}=\frac{d}{c}{f}_{t}({\kappa}_{t}^{{p}^{\text{\_}}}+\Delta {\kappa}_{t}^{p})\) éq 5.4.1-4
La relation [éq 5.4.1-4] est une équation non linéaire par rapport à la variable \(\Delta {\kappa}_{t}^{p}\) que l’on résout par un algorithme de Newton, ce qui permet de calculer \(\Delta {\varepsilon}_{{t}_{H}}^{p}\) par [éq 5.4.1-3] et \({\sigma}_{H}\) par [éq 5.4.1-2]. Compte tenu de [5.4.1-1], les contraintes sont donc complètement connues. [éq 5.4.1-1] donne encore:
\(s={s}^{e}-2\mu \Delta {\tilde{\varepsilon}}_{t}^{p}=0\) éq 5.4.1-5
Cette dernière équation permet de calculer \(\Delta {\tilde{\varepsilon}}_{t}^{p}\) et les déformations plastiques sont complètement connues.
Acceptabilité#
La forme discrète de la relation [éq 4.4-13] est:
\(3\Delta {\varepsilon}_{t{}_{H}}^{p}\ge \sqrt{2}c\Delta {\tilde{\varepsilon}}_{{t}_{}\mathrm{eq}}^{p}\) éq 5.4.2-1
[éq 5.4.1-5] donne:
\(\Delta {\tilde{\varepsilon}}_{{t}_{}\mathrm{eq}}^{p}=\frac{{\sigma}^{{e}^{\mathrm{eq}}}}{2\mu }\) éq 5.4.2-2
En utilisant [ éq 5.2- 5.2-4 ] et [éq 5.4.2-2], [éq 5.4.2-1] s’écrit:
\({\sigma}^{{e}^{\mathrm{eq}}}\frac{\mathrm{cK}}{\sqrt{2}\mu }\le {\sigma}_{H}^{e}-{\sigma}_{H}\) éq 5.4.2-3
Acceptabilité a priori et a posteriori#
Pour le critère de traction et pour la partie post pic du critère de compression, \({\sigma}_{H}=\frac{d}{c}{f}_{t}({\kappa}_{t}^{{p}^{\text{\_}}}+\Delta {\kappa}_{t}^{p})\) est une fonction décroissante de la variable d’écrouissage \(\Delta {\kappa}_{t}^{p}\) . On en déduit que \({\sigma}_{H}^{e}-{\sigma}_{H}^{-}\le {\sigma}_{H}^{e}-{\sigma}_{H}\) et donc que:
\({\sigma}^{{e}^{\mathrm{eq}}}\frac{\mathrm{cK}}{\sqrt{2}\mu }\le {\sigma}_{H}^{e}-{\sigma}_{H}^{-}\Rightarrow {\sigma}^{{e}^{\mathrm{eq}}}\frac{\mathrm{cK}}{\sqrt{2}\mu }\le {\sigma}_{H}^{e}-{\sigma}_{H}\)
La condition \({\sigma}^{{e}^{\mathrm{eq}}}\frac{\mathrm{cK}}{\sqrt{2}\mu }\le {\sigma}_{H}^{e}-{\sigma}_{H}^{-}\) est dite condition d’acceptabilité a priori car elle peut être calculée dès la prédiction élastique. La condition \({\sigma}^{{e}^{\mathrm{eq}}}\frac{\mathrm{cK}}{\sqrt{2}\mu }\le {\sigma}_{H}^{e}-{\sigma}_{H}\) est dite condition d’acceptabilité a posteriori.

Figure 5‑5.4.2.1-a
Ces conditions ont une interprétation graphique simple. On peut voir facilement que, dans le cas d’une solution régulière, on a:
\(\frac{{\sigma}^{{e}^{\mathrm{eq}}}-{\sigma}^{\mathrm{eq}}}{{\sigma}_{H}^{e}-{\sigma}_{H}}=\frac{\sqrt{2}\mu }{\mathrm{cK}}\)
Cela montre que la solution en contrainte s’obtient en projetant le point \(({\sigma}_{H}^{e},{\sigma}^{{e}^{\mathrm{eq}}})\) parallèlement à une direction \((\mathrm{cK},\sqrt{2}\mu )\) dans un diagramme \(({\sigma}_{H},{\sigma}^{\mathrm{eq}})\) , comme indiqué sur la [Figure 5.4.2-a]. Les zones d’acceptabilité de la projection au sommet sont des cônes dont le sommet et celui du cône de réversibilité et délimités d’une part par l’axe \({\sigma}_{H}>{\mathrm{OP}}_{t}\) et par une demi-droite issue du même point et de direction \((\mathrm{cK},\sqrt{2}\mu )\) .
Existence d’une solution régulière et d’une solution singulière.#
Dans le cas où la projection au sommet du cône est acceptable a posteriori, il se peut qu’existe aussi une solution régulière comme on peut le voir sur la [Figure 5.4.2-b].

Figure 5.4.2-b
Le sommet du cône de traction avant écrouissage est noté \({P}_{t}^{-}\) , celui du cône écroui avec un accroissement de variable d’écrouissage \(\Delta {\kappa}_{t}^{{p}^{1}}\) est noté \({P}_{t}^{1}\) , celui du cône écroui avec un accroissement de variable d’écrouissage \(\Delta {\kappa}_{t}^{{p}^{2}}>\Delta {\kappa}_{t}^{{p}^{1}}\) est noté \({P}_{t}^{2}\) . On voit qu’il existe une solution régulière avec \(\Delta {\kappa}_{t}^{{p}^{1}}\) et une solution avec projection au sommet du cône pour \(\Delta {\kappa}_{t}^{{p}^{2}}\) . Etant donné que la solution régulière correspond à un moindre écrouissage, dans le processus d’évolution, elle sera rencontrée avant la solution avec projection au sommet: c’est donc la solution régulière qu’il faut retenir.
Voilà pourquoi l’enchaînement des recherches de solution régulières et avec projection au sommet est le suivant:
i projection au sommet acceptable a priori : \({\sigma}^{{e}^{\mathrm{eq}}}\frac{\mathrm{cK}}{\sqrt{2}\mu }\le {\sigma}_{H}^{e}-{\sigma}_{H}^{\text{\_}}\)
Calcul de la solution avec projection au sommet: \(\Delta {\kappa}_{t}^{p}\) par [éq 5.4-4]
Si non
Recherche solution régulière
Si non convergence ou non vérification condition positivité
Calcul de la solution avec projection au sommet: \(\Delta {\kappa}_{t}^{p}\) par [éq 5.4-4]
Vérification d’acceptabilité a posteriori: \({\sigma}^{{e}^{\mathrm{eq}}}\frac{\mathrm{cK}}{\sqrt{2}\mu }\le {\sigma}_{H}^{e}-{\sigma}_{H}\)
Si pas acceptable : \({\sigma}^{{e}^{\mathrm{eq}}}\frac{\mathrm{cK}}{\sqrt{2}\mu }>{\sigma}_{H}^{e}-{\sigma}_{H}\)
Arrêt sur diagnostique de non vérification de condition d’applicabilité
Interversion des sommets des cônes de traction et compression#
A priori, le sommet du cône de compression correspond à une pression hydrostatique de traction beaucoup plus grande que celle du sommet du cône de traction. Mais, comme on peut le voir sur la [Figure 5.4.4-a], on peut trouver une histoire de chargement qui n’active jamais le critère de traction, qui active et écrouit fortement le critère de compression jusqu’à le rendre strictement inclus dans le domaine de réversibilité du critère de traction.

Figure 5.4.4-a
Quand les deux critères ont été ainsi inversés, ne devrait plus intervenir a priori que le critère de compression. Il se peut alors que la solution soit une projection au sommet du cône de compression, qui se traite exactement comme la projection au sommet du cône de traction.
Projection au sommet des deux cônes#
Dans le cas où les deux cônes ont été intervertis et dans le cas où la prédiction élastique viole les deux critères, il se peut que soient finalement acceptables à la fois la solution de projection au sommet du cône de compression et au sommet du cône de traction. Dans ces situations, aucun critère ne permet de sélectionner une solution plutôt que l’autre et on recherchera donc une projection simultanée au sommet des deux cônes, qui devront donc partager le même sommet, comme indiqué sur la [Figure5.4.5-a].

Figure 5.4.5-a
La solution avec projection aux deux sommets est obtenue en résolvant le système:
\({\sigma}_{H}^{e}-\frac{a}{b}K\Delta {\kappa}_{c}^{p}-\frac{c}{d}K\Delta {\kappa}_{t}^{p}=\frac{b}{a}{f}_{c}({\kappa}_{c}^{{p}^{\text{\_}}}+\Delta {\kappa}_{c}^{p})\) éq 5.4.5-1
\({\sigma}_{H}^{e}-\frac{a}{b}K\Delta {\kappa}_{c}^{p}-\frac{c}{d}K\Delta {\kappa}_{t}^{p}=\frac{d}{c}{f}_{t}({\kappa}_{t}^{{p}^{\text{\_}}}+\Delta {\kappa}_{t}^{p})\) éq 5.4.5-2
L’état de contrainte est donné par:
\(s=0\)
\({\sigma}_{H}=\frac{d}{c}{f}_{t}({\kappa}_{t}^{{p}^{\text{\_}}}+\Delta {\kappa}_{t}^{p})=\frac{b}{a}{f}_{c}({\kappa}_{c}^{{p}^{\text{\_}}}+\Delta {\kappa}_{c}^{p})\) éq 5.4.5-3
Détermination de l’opérateur tangent#
Au cours des itérations de l’algorithme de Newton-Raphson, il est nécessaire de calculer la matrice de raideur tangente. La construction de celle-ci joue un rôle important dans la stabilité, la rapidité et la précision de la méthode de résolution. Pour conserver ces propriétés, la matrice de raideur tangente doit être construite à partir d’un opérateur liant l’incrément de contrainte à l’incrément de déformation de façon précise à la fin du processus de retour sur les surfaces de charge. La matrice de Hooke, ainsi que les déformations thermiques interviennent comme des constantes lors de la détermination de l’opérateur tangent cohérent, construit à la fin de l’itération dans l’incrément concerné.
Le calcul de l’opérateur de comportement tangent cohérent prend en compte les déformations plastiques. Pour des raisons de simplicité, nous avons choisi de calculer l’opérateur de comportement tangent en vitesse.
Opérateur tangent en vitesse avec un seul critère actif#
Dans le cas d’un seul critère actif, par exemple, le critère en compression, le calcul de l’opérateur de comportement tangent en vitesse est le suivant :
On utilise donc les équations en vitesse, en charge élastoplastique :
\(\dot{\sigma}-H(\dot{\varepsilon}-{\dot{\kappa}}_{c}^{p}\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma })=0\) éq 5.5.1-1
\(\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }\dot{\sigma}+\frac{\partial {f}_{\mathrm{comp}}}{\partial {\kappa}_{c}^{p}}{\dot{\kappa}}_{c}^{p}=0\) éq 5.5.1-2
L’opérateur tangent en vitesse est défini par:
\(\dot{\sigma}=D\dot{\varepsilon}\) éq 5.5.1-3
En identifiant [éq 5.5.1-3] avec [éq 5.5.1-1] et [éq 5.5.1-2], on trouve classiquement:
\(D=H-\frac{1}{\delta}H\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma }H\) éq 5.5.1-4
avec:
\(\delta =\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma }-\frac{\partial {f}_{\mathrm{comp}}}{\partial {\kappa}_{c}^{p}}\) éq 5.5.1-5
Opérateur tangent en vitesse avec deux critères actifs#
Dans le cas où les deux critères sont activés, le critère en compression et le critère en traction, le calcul de l’opérateur de comportement tangent en vitesse est le suivant :
On part de:
\(\dot{\sigma}-H(\dot{\varepsilon}-{\dot{\kappa}}_{c}^{p}\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma }-{\dot{\kappa}}_{t}^{p}\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma })=0\) éq 5.5.2-1
\(\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }\dot{\sigma}+\frac{\partial {f}_{\mathrm{comp}}}{\partial {\kappa}_{c}^{p}}{\dot{\kappa}}_{c}^{p}=0\) éq 5.5.2-2
\(\frac{\partial {f}_{\mathrm{trac}}{}^{T}}{\partial \sigma }\dot{\sigma}+\frac{\partial {f}_{\mathrm{trac}}}{\partial {\kappa}_{t}^{p}}{\dot{\kappa}}_{t}^{p}=0\) éq 5.5.2-3
On aboutit à:
\(D=H-H\left[\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma }({\delta}_{\mathrm{cc}}\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }+{\delta}_{\mathrm{ct}}\frac{\partial {f}_{\mathrm{trac}}{}^{T}}{\partial \sigma })+\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma }({\delta}_{\mathrm{tc}}\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }+{\delta}_{\mathrm{tt}}\frac{\partial {f}_{\mathrm{trac}}{}^{T}}{\partial \sigma })\right]\) éq 5.5.2-4
avec :
\({\delta}_{\mathrm{cc}}=\frac{(\frac{\partial {f}_{\mathrm{trac}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma }-\frac{\partial {f}_{\mathrm{trac}}}{\partial {\kappa}_{t}^{p}})}{(\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma }-\frac{\partial {f}_{\mathrm{comp}}}{\partial {\kappa}_{c}^{p}})(\frac{\partial {f}_{\mathrm{trac}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma }-\frac{\partial {f}_{\mathrm{trac}}}{\partial {\kappa}_{t}^{p}})-(\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma })(\frac{\partial {f}_{\mathrm{trac}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma })}\) éq 5.5.2-5
\({\delta}_{\mathrm{ct}}=\frac{-(\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma })}{(\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma }-\frac{\partial {f}_{\mathrm{comp}}}{\partial {\kappa}_{c}^{p}})(\frac{\partial {f}_{\mathrm{trac}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma }-\frac{\partial {f}_{\mathrm{trac}}}{\partial {\kappa}_{t}^{p}})-(\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma })(\frac{\partial {f}_{\mathrm{trac}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma })}\) éq 5.5.2-6
\({\delta}_{\mathrm{ct}}=\frac{-(\frac{\partial {f}_{\mathrm{trac}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma })}{(\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma }-\frac{\partial {f}_{\mathrm{comp}}}{\partial {\kappa}_{c}^{p}})(\frac{\partial {f}_{\mathrm{trac}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma }-\frac{\partial {f}_{\mathrm{trac}}}{\partial {\kappa}_{t}^{p}})-(\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma })(\frac{\partial {f}_{\mathrm{trac}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma })}\) é q 5.5.2-7
\({\delta}_{\mathrm{cc}}=\frac{(\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma }-\frac{\partial {f}_{\mathrm{comp}}}{\partial {\kappa}_{c}^{p}})}{(\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma }-\frac{\partial {f}_{\mathrm{comp}}}{\partial {\kappa}_{c}^{p}})(\frac{\partial {f}_{\mathrm{trac}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma }-\frac{\partial {f}_{\mathrm{trac}}}{\partial {\kappa}_{t}^{p}})-(\frac{\partial {f}_{\mathrm{comp}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma })(\frac{\partial {f}_{\mathrm{trac}}{}^{T}}{\partial \sigma }H\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma })}\) éq 5.5.2-8
L’expression semble coûteuse à exprimer en terme de produits de matrice et de calcul. Mais, lorsque les opérations sont faites dans l’ordre qui convient, il suffit de calculer peu de termes. De plus, ce sont les mêmes termes qui interviennent à plusieurs reprises. Il faut calculer les dérivées des critères par rapport à la contrainte, et par rapport aux multiplicateurs plastiques, puis les sommes et les produits avec les valeurs réelles, pour terminer par la constitution des matrices et leurs sommes.
Enfin, la matrice résultante à l’avantage d’être symétrique, ce qui convient à la résolution standard avec le Code_Aster .
Dérivées successives des critères en traction et en compression#
Dérives successives des critères par rapport à la contrainte#
Les dérivées des composantes isotropes et déviatoriques de la contraintes par rapport au tenseur de contraintes s’expriment de la façon suivante :
En définissant le vecteur \({\pi}_{0}=\left[\begin{array}{c}1\\ 1\\ 1\\ 0\\ 0\\ 0\end{array}\right]\)
les dérivées des critères par rapport au tenseur de contraintes s’expriment de la façon suivante :
\(\frac{\partial {f}_{\mathrm{comp}}}{\partial \sigma }=\frac{s}{\sqrt{2}b{\sigma}^{\mathrm{eq}}}+\frac{a}{\mathrm{3b}}{\pi}_{0}\)
\(\frac{\partial {f}_{\mathrm{trac}}}{\partial \sigma }=\frac{s}{\sqrt{2}d{\sigma}^{\mathrm{eq}}}+\frac{c}{\mathrm{3d}}{\pi}_{0}\)
Dérives successives des critères par rapport aux multiplicateurs plastiques#
Dérivée du critère de compression dans le cas d’une courbe post-pic linéaire :
\(\begin{array}{c}\frac{\partial {f}_{\mathrm{comp}}}{\partial {\kappa}_{c}^{p}}=\frac{-4}{3}.{f}_{c}^{'}.(\frac{1}{{\kappa}_{e}}-\frac{{\kappa}_{c}^{p}}{{{\kappa}_{e}}^{2}})\mathrm{si}{\kappa}_{c}^{p}\le {\kappa}_{e}\\ \frac{\partial {f}_{\mathrm{comp}}}{\partial {\kappa}_{c}^{p}}={f}_{c}^{'}.(\frac{1}{({\kappa}_{t}^{u}-{\kappa}_{e})})\mathrm{si}{\kappa}_{e}\le {\kappa}_{c}^{p}\le {\kappa}_{t}^{u}\end{array}\)
Dérivée du critère de compression dans le cas d’une courbe post-pic non linéaire :
\(\begin{array}{c}\frac{\partial {f}_{\mathrm{comp}}}{\partial {\kappa}_{c}^{p}}=\frac{-4}{3}.{f}_{c}^{'}.(\frac{1}{{\kappa}_{e}}-\frac{{\kappa}_{c}^{p}}{{{\kappa}_{e}}^{2}})\mathrm{si}{\kappa}_{c}^{p}\le {\kappa}_{e}\\ \frac{\partial {f}_{\mathrm{comp}}}{\partial {\kappa}_{c}^{p}}=2.{f}_{c}^{'}.(\frac{({\kappa}_{c}^{p}-{\kappa}_{e})}{{({\kappa}_{c}^{u}-{\kappa}_{e})}^{2}})\mathrm{si}{\kappa}_{e}\le {\kappa}_{c}^{p}\le {\kappa}_{c}^{u}\end{array}\)
Dérivée du critère de traction dans le cas d’une courbe post-pic linéaire :
\(\frac{\partial {f}_{\mathrm{trac}}}{\partial {\kappa}_{t}^{p}}=\frac{{f}_{t}^{'}}{{\kappa}_{t}^{u}}\mathrm{si}{\kappa}_{t}^{p}\le {\kappa}_{t}^{u}\)
Dérivée du critère de traction dans le cas d’une courbe post-pic exponentielle : \(\frac{\partial {f}_{\mathrm{trac}}}{\partial {\kappa}_{t}^{p}}={f}_{t}^{'}(\frac{a}{{\kappa}_{t}^{u}}){e}^{-\frac{a.{\kappa}_{t}^{p}}{{\kappa}_{t}^{u}}}\)
Variables internes du modèle#
Nous montons ici les variables internes stockées en chaque point de Gauss dans l’implémentation du modèle
Numéro de variable interne |
Sens physique |
1 |
\({\kappa}_{c}^{p}\) : déformation plastique cumulée en compression |
2 |
\({\kappa}_{t}^{p}\) : déformation plastique cumulée en traction |
3 |
\(\theta\) : température maximum atteinte au point de gauss |
4 |
Indicateur de plasticité |
Organigramme général de résolution#
L’organigramme comprend les différentes étapes de la résolution, avec le traitement des projections aux sommets des cônes de compression et de traction de la façon suivante:
en début d’algorithme,
on effectue une projection au sommet du cône de traction:
lorsque la prédiction élastique vérifie la condition de projection a priori en traction ,
lorsque la prédiction élastique vérifie la condition de projection a priori en compression et que les sommets des cônes de traction et de compression se sont intervertis sur l’axe hydrostatique,
on effectue une projection simultanée aux sommets des cônes de traction et de compression:
lorsque la prédiction élastique vérifie la condition de projection a priori en compression et que les sommets des cônes de traction et de compression se sont intervertis sur l’axe hydrostatique, et que la projection au sommet du cône de traction n’a pas donné de solution valide,
on effectue une projection au sommet du cône de compression:
lorsque la prédiction élastique vérifie la condition de projection a priori en compression et que les sommets des cônes de traction et de compression se sont intervertis sur l’axe hydrostatique, et que la projection au sommet du cône de traction n’a pas donné de solution valide, et que la projection simultanée aux sommets des deux cônes n’a pas donné de solution valide,
en milieu d’algorithme,
on effectue une, deux ou trois résolutions standards avec projection sur le critère de compression ou sur le critère de traction ou sur les deux critères à la fois,
et en fin d’algorithme ,
lorsque que les résolutions standards avec l’activation d’un critère (traction ou compression) ou des deux critères à la fois n’ont pas donné de solution,
on effectue une projection au sommet du cône de traction:
lorsque la prédiction élastique vérifie la condition de projection a posteriori en traction ,
lorsque la prédiction élastique vérifie la condition de projection a posteriori en compression (et que les sommets des cônes de traction et de compression se sont intervertis sur l’axe hydrostatique,
on effectue une projection simultanée aux sommets des cônes de traction et de compression:
lorsque la prédiction élastique vérifie la condition de projection a posteriori en compression et que les sommets des cônes de traction et de compression se sont intervertis sur l’axe hydrostatique, et que la projection au sommet du cône de traction n’a pas donné de solution valide,
on effectue une projection au sommet du cône de compression:
lorsque la prédiction élastique vérifie la condition de projection a posteriori en compression et que les sommets des cônes de traction et de compression se sont intervertis sur l’axe hydrostatique, et que la projection au sommet du cône de traction n’a pas donné de solution valide, et que la projection simultanée aux sommets des deux cônes n’a pas donné de solution valide.
A l’issue de chaque résolution ayant convergé, on effectue les vérifications de conformité de la solution suivante:
validité de la solution par rapport au second critère, lorsque la résolution a été faite avec un seul critère. Dans tous les cas, il suffit de vérifier que les deux critères calculés avec la contrainte finale, sont négatifs ou nuls,
conformité de la solution: on calcule en cours de résolution la contrainte équivalente finale. Il arrive parfois que la solution se situe au delà du sommet du cône qui s’écrouit, ce qui conduit à une contrainte équivalente «négative». Numériquement, cela se traduit par un critère final strictement positif. Pour vérifier la conformité de la solution, il suffit de vérifier que les deux critères calculés avec la contrainte finale, sont négatifs ou nuls,
validité des projections aux sommets des cônes. Il faut vérifier qu’après résolution, lorsqu’on connaît l’écrouissage du critère, la pente de la droite reliant la prédiction élastique à la projection est inférieure à la pente de la direction de projection. (condition de projection a posteriori au sommet des cônes). Dans le cas contraire, cela signifie qu’il existe une solution avec résolution standard.
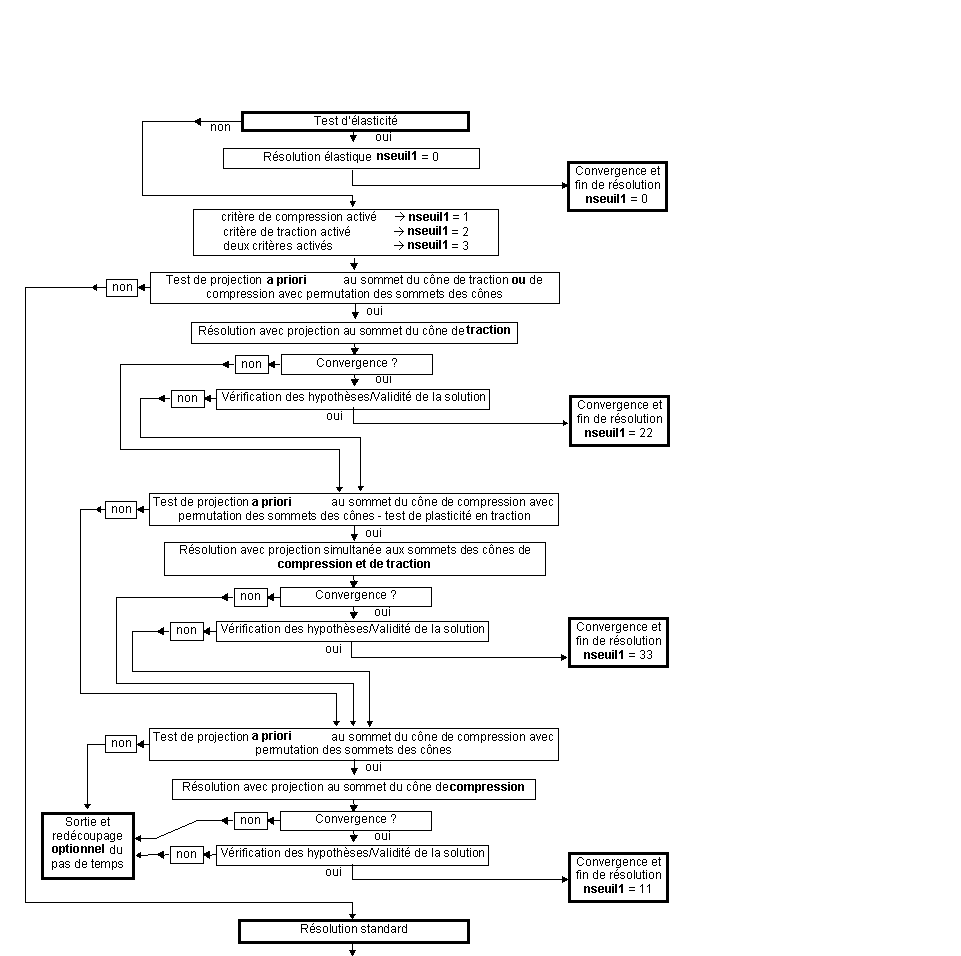
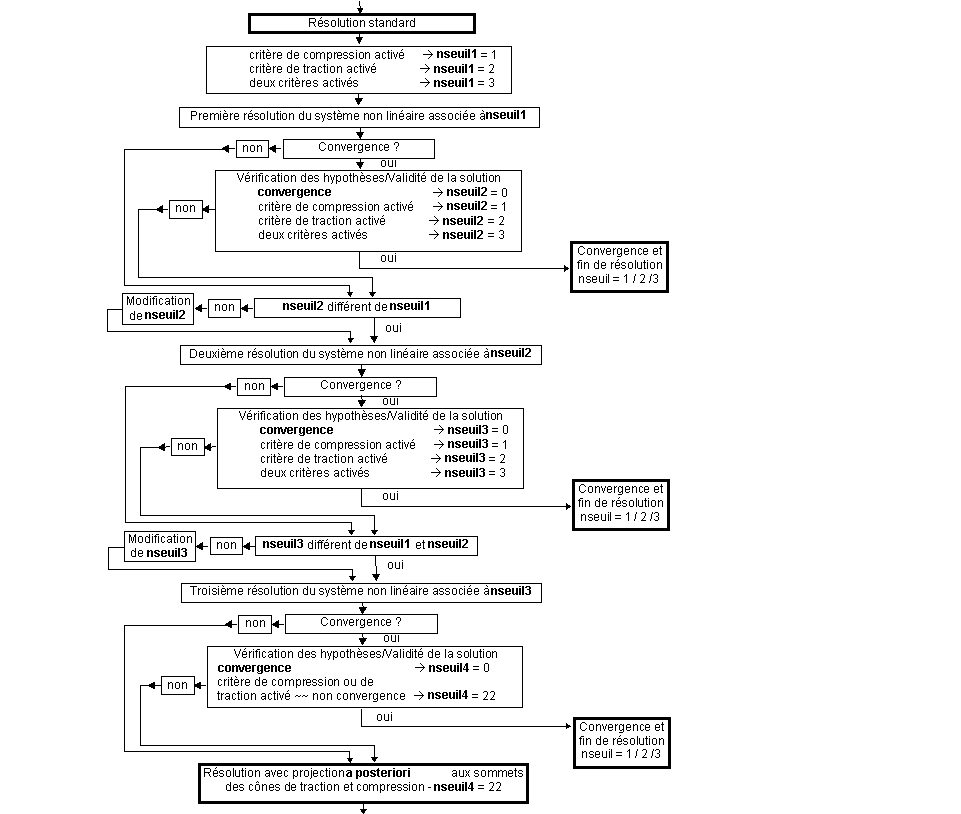
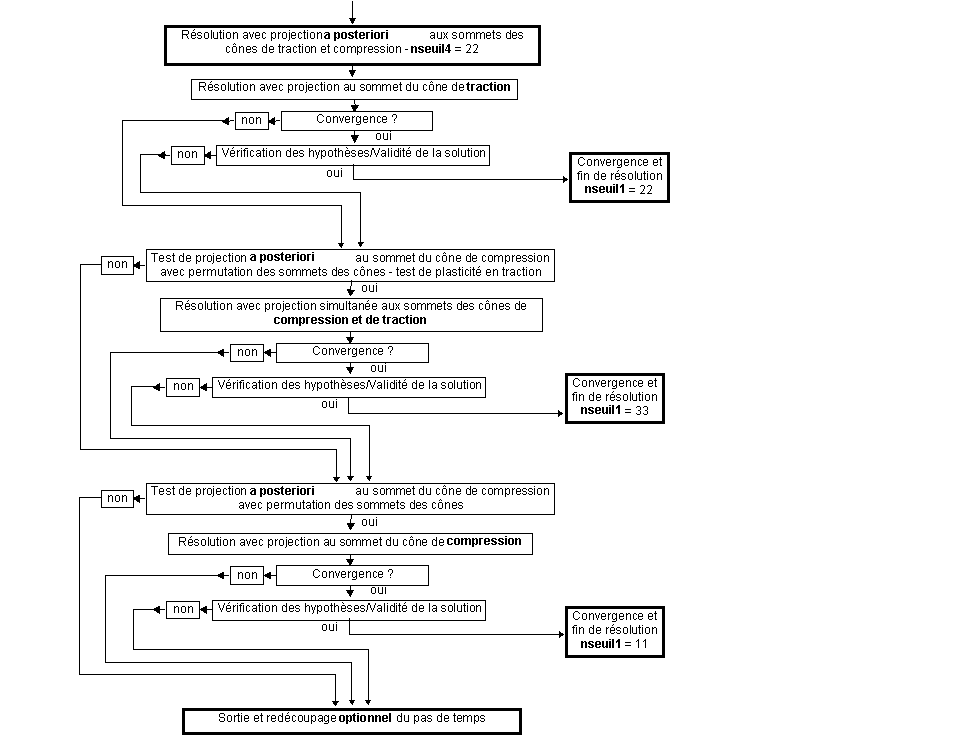
Remarque:
Dans le cas des projections aux sommets des cônes, on commence systématiquement par la projection au sommet du cône de traction. Si cette solution est valide, on conserve celle-ci. Dans le cas contraire, si le critère de traction est activé, on effectue une résolution avec projection aux sommets des deux cônes. Si la nouvelle solution est valide, on conserve celle-là. Sinon, on effectue une résolution avec projection au sommet du cône de compression seule.
Remarque:
Dans le cas où les conditions de projection au sommets des cônes sont activées, l’une des trois solutions doit être valide, mais pour des sauts élastiques particulièrement importants, il se peut que la résolution n’aboutisse pas. La solution est alors d’effectuer un redécoupage du pas de temps.
Remarque:
La projection aux sommets des deux cônes simultanément suppose que le critère de traction soit activé. Il se peut très bien qu’en cas de permutation des sommets, seul le critère de compression se retrouve activé. Il faut faire alors une projection au sommet du cône de compression seul.
snap-back avec les valeurs initiales des coefficients c et d
Nous montrons dans cet annexe le problème de snap-back rencontré dans la simulation d’un essai de traction suivi compression simples, dans le cas où le choix des coefficients \(c\) et \(d\) du critère de traction correspond à une situation où le critère de traction coupe les axes dans un diagramme de contrainte planes, c’est à dire le choix des coefficients [éq 3.3-1] et [éq 3.3-2] conduisant à un domaine de réversibilité représenté sur la [Figure3.3-b]:
Les hypothèses sont les suivantes:
on ne prend en compte que le critère de traction,
la courge d’écrouissage est du type: \({f}_{t}({\kappa}_{t}^{p})={f}_{t}^{'}+h{\kappa}_{t}^{p}\) ,
on note simplement: \(\lambda ={\kappa}_{t}^{p}\) si bien que la courbe d’écrouissage s’écrit: \({f}_{t}={f}_{t}^{'}+\mathrm{h\lambda }\) ,
le coefficient de poisson nul,
l’écrouissage est négatif ,
la condition d’applicabilité est remplie: \(-E<h<0\) .
On considère un essai uni axial piloté en déformation selon x, comme indiqué sur la Figure 5-

Figure 5‑a
Dans les autres directions \(y\) et \(z\) , les conditions imposées sont des conditions de contraintes nulles: \({\sigma}_{yy}={\sigma}_{zz}=0\) .
On commence par imposer une déformation de traction \({\varepsilon}_{xx}^{1}\) telle qu’il y ait une plastification en traction, mais sans que la limite de traction retombe à 0. C’est le point \({P}_{1}\) dans le diagramme contrainte-déformation. On note \({\varepsilon}_{xx}^{0}\) la déformation pour laquelle la limite de rupture en traction apparaît pour la première fois. Au delà du point \({P}_{1}\) , on impose une décroissance de la déformation, qui entraîne un déchargement élastique du matériau, jusqu’à la valeur \({\varepsilon}_{xx}^{2}<0\) de la déformation pour laquelle on a à nouveau une plastification, mais cette fois sous contrainte de compression. L’objet de cette annexe est essentiellement d’étudier le comportement du modèle non retenu (celui correspondant aux formules [éq 3.3-1] et [éq 3.3-2]) au delà du point \({P}_{2}\) .
A1.1 Calcul des contraintes et des déformations au cours du chargement
Compte tenu des hypothèses rappelées plus haut, les invariants de contrainte valent:
\({I}_{1}={\sigma}_{xx}\) éq A1.1-1
\(\sqrt{{J}_{2}}=\frac{\mid {\sigma}_{xx}\mid }{\sqrt{3}}\) éq A1.1-2
\({\sigma}^{\mathrm{eq}}=\mid {\sigma}_{xx}\mid\) éq A1.1-3
L’écoulement plastique se calcule par:
\({\dot{\varepsilon}}_{xx}^{p}=\frac{c+\sqrt{2}}{3d}\dot{\lambda}\) éq A1.1-4
A1.1.1 Chemins 0P0 et P0P1
Compte tenu des relations [éq A1.1-1] à [éq A1.1-4], et compte tenu du fait que le long de ce trajet les contraintes \({\sigma}_{xx}\) sont positives, on trouve facilement
\({\sigma}_{{xx}_{1}}=E(\frac{h{\varepsilon}_{{xx}_{1}}+\frac{c+\sqrt{2}}{\mathrm{3d}}{f}_{t}^{'}}{h+\frac{{(c+\sqrt{2})}^{2}E}{{\mathrm{9d}}^{2}}})\) éq A1.1.1-1
A1.1.2 Chemin P1P2
Par définition, \(\mathit{P1P2}\) est un chemin de décharge élastique, le point \(\mathit{P2}\) étant tel que le critère y est à nouveau atteint
\({\sigma}_{{xx}_{2}}=\frac{\mathrm{3d}}{c-\sqrt{2}}{\sigma}_{{xx}_{1}}\) éq A1.1.2-1
\({\varepsilon}_{{xx}_{2}}=(\frac{\mathrm{3d}}{c-\sqrt{2}})\frac{{\sigma}_{{xx}_{1}}}{E}+{\varepsilon}_{{xx}_{1}}\) éq A1.1.2-2
A1.1.3 Au delà du point P2
On s’intéresse maintenant à la pente de la courbe au point \(\mathit{P2}\) dans le repère \(({\sigma}_{xx},{\varepsilon}_{xx})\) . Plus précisément on s’intéresse à la pente de cette courbe pour une solution dissipative.
En écrivant que le matériau reste plastique au delà du point \(\mathit{P2}\) , c’est à dire que l’état de contrainte reste sur le critère-lequel s’écrouit-, on trouve:
\(\dot{{\sigma}_{xx}}=\frac{\mathrm{3d}}{c-\sqrt{2}}h\dot{\lambda}\) éq A1.1.3-1
Par ailleurs, en calculant l’accroissement d’écoulement plastique, et en le reportant dans le calcul de l’accroissement de contrainte, on trouve:
\(\dot{{\varepsilon}_{xx}}=\frac{\dot{{\sigma}_{xx}}}{E}+\frac{\dot{\lambda}}{\mathrm{3d}}(c-\sqrt{2})\) éq A1.1.3-2
On peut alors éliminer \(\dot{\lambda}\) entre [éq A1.1.3-1] et [éq A1.1.3-2] et on obtient:
\(\frac{\dot{{\sigma}_{xx}}}{\dot{{\varepsilon}_{xx}}}=\frac{hE}{h+E\frac{{(c-\sqrt{2})}^{2}}{{\mathrm{9d}}^{2}}}={E}_{{T}_{2}}\) éq A1.1.3-3
Cette formule donne la pente de la réponse dans le plan \(({\sigma}_{xx},{\varepsilon}_{xx})\)
Le numérateur est toujours négatif puisque \(h\) est négatif .
Le signe de \({\frac{\dot{{\sigma}_{xx}}}{\dot{{\varepsilon}_{xx}}}\mid }_{2}={E}_{{T}_{2}}\) dépend du signe du dénominateur, ainsi deux cas se posent :
Si \(h<-E\frac{{(c-\sqrt{2})}^{2}}{{\mathrm{9d}}^{2}}\) alors \({\frac{\dot{{\sigma}_{xx}}}{\dot{{\varepsilon}_{xx}}}\mid }_{2}={E}_{{T}_{2}}\) est positif on a une configuration de snap-back.
Si \(h>-E\frac{{(c-\sqrt{2})}^{2}}{{\mathrm{9d}}^{2}}\) alors \({\frac{\dot{{\sigma}_{xx}}}{\dot{{\varepsilon}_{xx}}}\mid }_{2}={E}_{{T}_{2}}\) est négatif et il n’y a pas de snap-back.
Une nouvelle condition apparaît pour éviter les snap back, condition que nous comparons à celle déjà évoquée, mais qui concernait en fait les éventuels snap back au point \(\mathit{P1}\) .
Pente au point \(\mathit{P1}\) dans le repère \(({\varepsilon}_{xx},{\sigma}_{xx})\) : \({E}_{{T}_{1}}=\frac{hE}{h+E}\) ,
Pente au point \(\mathit{P2}\) dans le repère \(({\varepsilon}_{xx},{\sigma}_{xx})\) : \({E}_{{T}_{2}}=\frac{hE}{h+E\frac{{(c-\sqrt{2})}^{2}}{{\mathrm{9d}}^{2}}}\) .
Or \(\frac{{(c-\sqrt{2})}^{2}}{{\mathrm{9d}}^{2}}=3{\alpha}^{2}=3{(\frac{{f}_{t}^{'}}{{f}_{c}^{'}})}^{2}\) .
On peut par exemple exprimer \({E}_{{T}_{2}}\) en fonction de \({E}_{{T}_{1}}\) en éliminant \(h\) :
\({E}_{{T}_{2}}=\frac{{E}_{{T}_{1}}E}{3{\alpha}^{2}E+{E}_{{T}_{1}}(1-3{\alpha}^{2})}\) .
Par exemple,
\({E}_{{T}_{2}}=\infty\) pour \({E}_{{T}_{1}}=-\frac{{\mathrm{3\alpha }}^{2}E}{(1-{\mathrm{3\alpha }}^{2})}\) .
A titre d’exemple, pour \(E=32000\mathit{Mpa}\) , \({f}_{t}^{'}=3\text{Mpa}\) et \({f}_{c}^{'}=38,3\text{Mpa}\) on trouve \({E}_{{T}_{1}}\approx -601\) . Ainsi \({E}_{{T}_{1}}\) est très faible par rapport à \(E\) . comme illustré sur la [Figure A1.1.3-a].

Figure A1.1.3-a
Ainsi donc, une condition impliquant qu’il n’y ait pas de snap-back au point \(\mathit{P2}\) serait trop restrictive et aboutirait à choisir un matériau pratiquement pas fragile en traction.
C’est pour cette raison que nous avons préféré modifier l’expression des coefficients \(c\) et \(d\) comme indiqué au paragraphe [§ 3.3 ].
Ceci dit, et même si la solution adoptée, consistant à modifier les coefficients \(c\) et \(d\) semble raisonnable, l’exemple traité dans cet annexe montre qu’un problème très simple peut finalement être un problème de structure: il y a dans cet exemple des conditions d’équilibre, ce sont les conditions: \({\sigma}_{yy}={\sigma}_{zz}=0\) .
Bibliographie#
GEORGIN «Contribution à la modélisation du béton sous sollicitation de dynamique rapide. La prise en compte de l’effet de vitesse par la viscoplasticité» - Thèse (15/01/98).
HEINFLING «Contribution à la modélisation numérique du comportement du béton et des structures en béton armé sous sollicitations thermo-mécaniques à haute température» - Thèse (14/01/98)
ROCKAFELLAR «Convex analysis» Princeton University Press 1972
HALPHEN et NGUYEN QUOC SON, «Sur les matériaux standards généralisés» Journal de Mécanique Vol 14 n° 1, 1975
TARDIEU, I. VAUTIER, E. LORENTZ «Algorithme non linéaire quasi statique» document de référence Aster [R5.03.01].
Fonctionnalités et vérification#
Ce document concerne la loi de comportement BETON_DOUBLE_DP (mot clé COMPORTEMENT de STAT_NON_LINE) et son matériau associé BETON_DOUBLE_DP (commande DEFI_MATERIAU).
Cette loi de comportement est vérifiée par les cas tests suivants:
SSNP116 |
Couplage fluage/fissuration - Traction uniaxiale |
|
SSNV143 |
Traction biaxiale avec la loi de comportement BETON_DOUBLE_DP |
|
SSNV150 |
Traction triaxiale avec la loi de comportement BETON_DOUBLE_DP |
|
SSNV151 |
Traction / Compression avec la loi de comportement BETON_DOUBLE_DP |
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
5 |
C. CHAVANT , EDF-R&D/AMAB.CIREE CS-SI |
Texte initial |