v3.02.304 SSLP304 - Plaque carrée orthotrope en traction uniaxiale hors des axes d’orthotropie#
Résumé:
Ce test représente le calcul statique d’une plaque carrée, en matériau élastique orthotrope, dont les axes d’orthotropie sont inclinés de 30 degrés par rapport à l’arête de base, soumise à une traction uniaxiale. Il permet de valider la bonne prise en compte des matériaux élastiques orthotropes et du changement de repère associé. 4 modélisations sont utilisées: C_PLAN avec des mailles QUAD8 et TRIA6, dans un premier repère, C_PLAN dans un second repère, COQUE_3D avec des mailles QUAD9 et TRIA7, en petits déplacements et COQUE_3D en grands déplacements. Les déplacements et les contraintes obtenues sont comparés à une solution de référence analytique.
Les deux premières modélisations de ce test sont issues de la validation indépendante de la version 3 de Code_Aster (lot statique linéaire).
Solution de référence#
Méthode de calcul utilisée pour la solution de référence#
Solution analytique, obtenue avec l’hypothèse d’uniaxialité des contraintes:

soit dans le repère \((A,L,T)\) :

Par la loi de comportement élastique orthotrope, en utilisant les conventions de Code_Aster en ce qui concerne \({\mathrm{NU}}_{LT}\) , (cf. document d’utilisation de la commande DEFI_MATERIAU [§3.5.2]), on obtient directement (voir par exemple [bib1]):

,


avec:



Comme les déformations sont uniformes dans la plaque on obtient, par intégration, les déplacements dans le repères \((A,x,y)\) :


Résultats de référence#
Déplacements dans le repère \((A,x,y)\) (en \(m\) ):
Point |
\(B\) |
\(C\) |
\(D\) |

|
5.917 10–7 |
5.917 10–7 |
|

|
–2.292 10–7 |
–5.028 10–7 |
–7.319 10–7 |
Contraintes dans le repère lié à l’orthotropie:
\({\sigma}_{LL}(x,y)=7500\mathrm{Pa}\) , \({\sigma}_{\mathrm{TT}}(x,y)=2500\mathrm{Pa}\) , \({\sigma}_{LT}(x,y)=4330.127\mathrm{Pa}\)
Incertitude sur la solution#
Solution analytique.
Références bibliographiques#
GAY D: «Matériaux composites»; 3ème édition, Hermès
Modélisation A#
Caractéristiques de la modélisation#
Modélisation C_PLAN. La plaque est tournée de -30 degrés autour de \(Z\) , c’est-à-dire que l’axe \(X\) global est colinéaire à l’axe d’orthotropie \(L\) . Les conditions aux limites et chargements, à appliquer dans le repère \((A,x,y)\) lié à la plaque, sont donc projetées sur le repère global \((A,X,Y)\) (utilisation de LIAISON_DDL en \(B\) ).
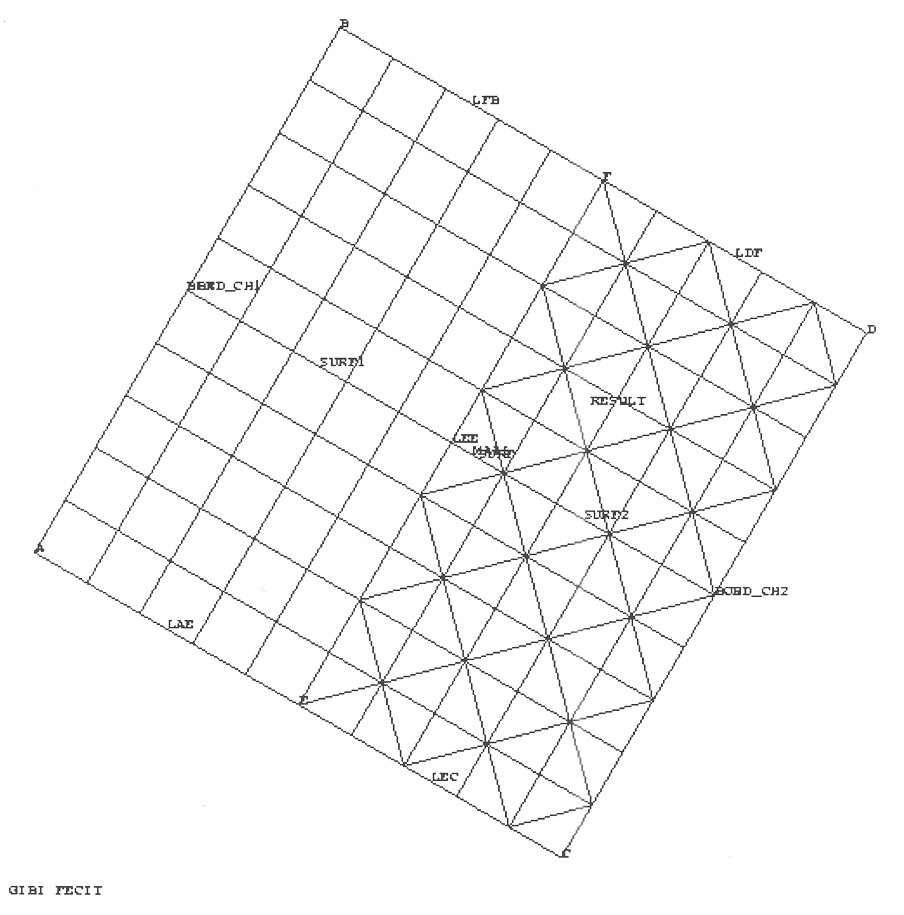
Caractéristiques du maillage#
Nombre de nœuds: 391
Nombre de mailles et types: 50 QUAD8, 100 TRIA6
Valeurs testées#
Valeur |
Identification |
Référence |
\(\mathit{Ux}(c)=\mathit{Ux}(D)\) |
\(\mathit{DX}(C)\) |
5.917 10–7 |
\(\mathit{Uy}(B)\) |
\(\mathit{DY}(B)\) |
–2.292 10–7 |
\(\mathit{Uy}(C)\) |
\(\mathit{DY}(C)\) |
–5.028 10–7 |
\(\mathit{Uy}(D)\) |
\(\mathit{DY}(D)\) |
–7.319 10–7 |
\(Sigma\text{LL}\) |
\(\mathit{SIXX}\) (tout point) |
7500 |
\(Sigma\text{TT}\) |
\(\mathit{SIYY}\) (tout point) |
2500 |
\(Sigma\text{LL}\) |
\(\mathit{SIXY}\) (tout point) |
4300.127 |
Modélisation B#
Caractéristiques de la modélisation#
Modélisation C_PLAN. La plaque est parallèle aux axes globaux, c’est-à-dire que l’axe \(X\) global est colinéaire à l’axe \(x\) . C’est donc l’axe d’orthotropie \(L\) qui est à orienter (à l’aide du mot-clé MASSIF de AFFE_CARA_ELEM).
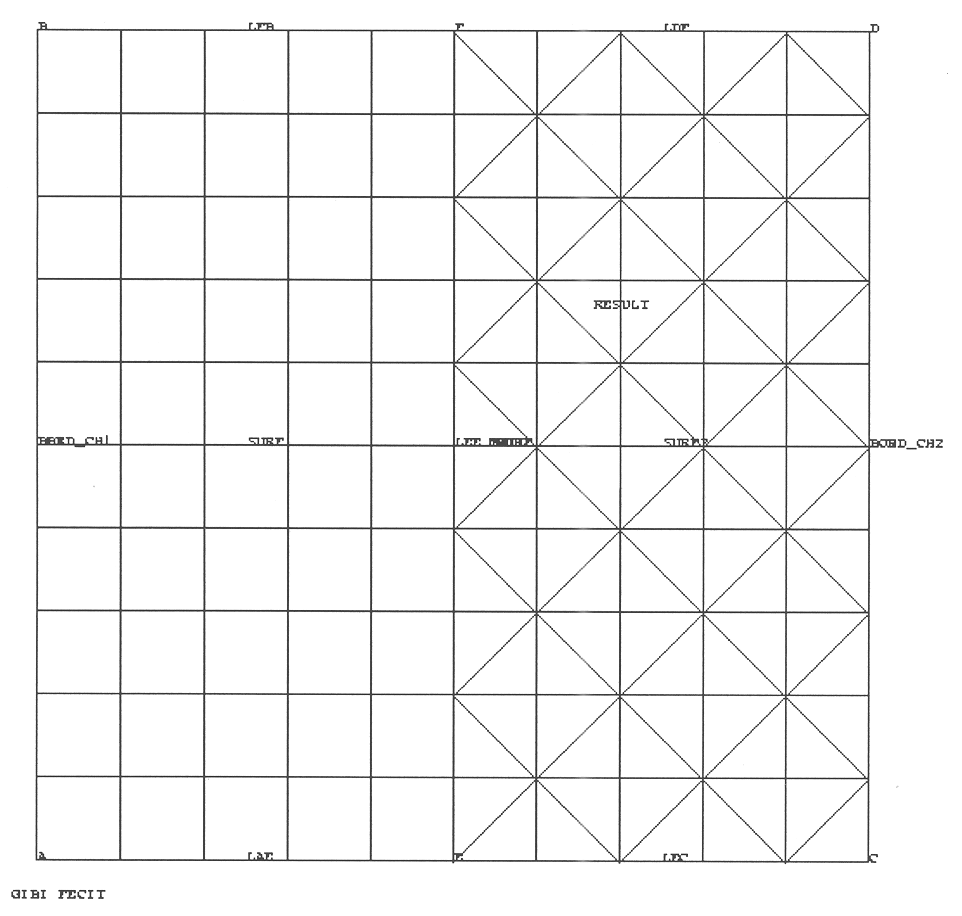
Caractéristiques du maillage#
Nombre de nœuds: 391
Nombre de mailles et types: 50 QUAD8, 100 TRIA6
Valeurs testées#
Valeur |
Identification |
Référence |
\(\mathit{Ux}(c)=\mathit{Ux}(D)\) |
\(\mathit{DX}(C)\) |
5.917 10–7 |
\(\mathit{Uy}(B)\) |
\(\mathit{DY}(B)\) |
–2.292 10–7 |
\(\mathit{Uy}(C)\) |
\(\mathit{DY}(C)\) |
–5.028 10–7 |
\(\mathit{Uy}(D)\) |
\(\mathit{DY}(D)\) |
–7.319 10–7 |
\(Sigma\text{LL}\) |
\(\mathit{SIXX}\) (tout point) |
7500 |
\(Sigma\text{TT}\) |
\(\mathit{SIYY}\) (tout point) |
2500 |
\(Sigma\text{LL}\) |
\(\mathit{SIXY}\) (tout point) |
4300.127 |
Remarques#
Allure de la déformée: non symétrique à cause de l’orthotropie.
Modélisation C#
Caractéristiques de la modélisation#
Modélisation COQUE_3D. La plaque est parallèle aux axes globaux, c’est-à-dire que l’axe \(X\) global est colinéaire à l’axe \(x\) . C’est donc l’axe d’orthotropie \(L\) qui est à orienter (à l’aide du mot-clé MASSIF de AFFE_CARA_ELEM). Le maillage est identique à celui de la modélisation B.
Caractéristiques du maillage#
Nombre de nœuds: 541
Nombre de mailles et types: 50 QUAD9, 100 TRIA7
Valeurs testées#
Valeur |
Identification |
Référence |
\(\mathit{Ux}(c)=\mathit{Ux}(D)\) |
\(\mathit{DX}(C)\) |
5.917 10–7 |
\(\mathit{Uy}(B)\) |
\(\mathit{DY}(B)\) |
–2.292 10–7 |
\(\mathit{Uy}(C)\) |
\(\mathit{DY}(C)\) |
–5.028 10–7 |
\(\mathit{Uy}(D)\) |
\(\mathit{DY}(D)\) |
–7.319 10–7 |
\(Sigma\text{LL}\) |
\(\mathit{SIXX}\) (tout point) |
7500 |
\(Sigma\text{TT}\) |
\(\mathit{SIYY}\) (tout point) |
2500 |
\(Sigma\text{LL}\) |
\(\mathit{SIXY}\) (tout point) |
4300.127 |
Modélisation D#
Caractéristiques de la modélisation#
Modélisation COQUE_3D en grands déplacements. La plaque est parallèle aux axes globaux, c’est‑à‑dire que l’axe \(X\) global est colinéaire à l’axe \(x\) . C’est donc l’axe d’orthotropie \(L\) qui est à orienter (à l’aide du mot-clé MASSIF de AFFE_CARA_ELEM). Le maillage est identique à celui de la modélisation B.
Caractéristiques du maillage#
Nombre de nœuds: 541
Nombre de mailles et types: 50 QUAD9, 100 TRIA7
Valeurs testées#
Valeur |
Identification |
Référence |
\(\mathit{Ux}(c)=\mathit{Ux}(D)\) |
\(\mathit{DX}(C)\) |
5.917 10–7 |
\(\mathit{Uy}(B)\) |
\(\mathit{DY}(B)\) |
–2.292 10–7 |
\(\mathit{Uy}(C)\) |
\(\mathit{DY}(C)\) |
–5.028 10–7 |
\(\mathit{Uy}(D)\) |
\(\mathit{DY}(D)\) |
–7.319 10–7 |
\(Sigma\text{LL}\) |
\(\mathit{SIXX}\) (tout point) |
7500 |
\(Sigma\text{TT}\) |
\(\mathit{SIYY}\) (tout point) |
2500 |
\(Sigma\text{LL}\) |
\(\mathit{SIXY}\) (tout point) |
4300.127 |
Synthèse des résultats#
Les résultats des quatre modélisations sont très proches de la solution analytique: au maximum 0.015% d’écart.
Ce test valide donc la prise en compte de l’élasticité orthotrope.