v5.01.108 SDND108 - Loi de comportement DIS_CONTACT en dynamique#
Résumé:
Ce test valide l’utilisation de la loi de comportement DIS_CONTACT pour le contact-frottement sur des discrets en dynamique.
Solution de référence#
Modélisation A#
Ce cas modélise une masse qui rebondit sur une surface élastique (modélisation A)
Résultats de référence#
La masse est lâchée avec une vitesse initiale \({V}_{0}\) (configuration a), tant qu’elle n’a pas touchée le sol, elle ne subit que la pesanteur. Lorsqu’elle touche le sol élastique, elle est soumise en plus de la pesanteur à un effort du type \(k.\delta x\) (configuration b). Une fois le rebond terminé, elle n’est plus soumise qu’à la pesanteur (configuration a) avec une vitesse initiale \({V}_{1}\) .
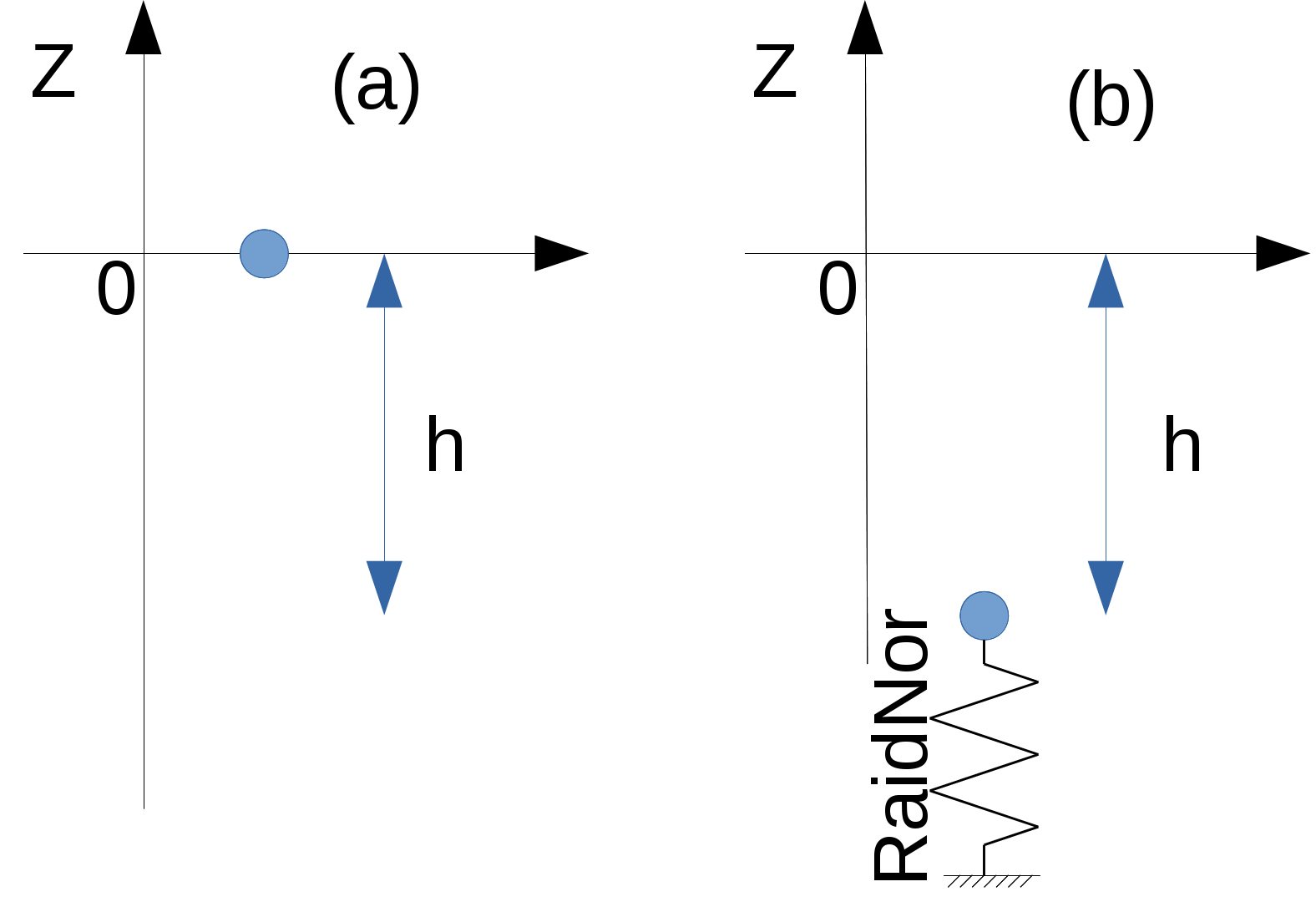
Tableau 2.1.1-1 : Modèle de comportement
Équation pendant la chute libre (configuration a):
Équation pendant le rebond (configuration b):
Modélisation B#
Ce cas modélise une masse qui rebondit sur une surface absorbante.
Résultats de référence#
La masse est lâchée avec une vitesse initiale \({V}_{0}\) (configuration a), tant qu’elle n’a pas touchée la surface, elle ne subit que la pesanteur. Lorsqu’elle touche lasurface absorbante, elle est soumise en plus de la pesanteur à un effort du type \(k.\delta x+c.\dot{x}\) (configuration c). Une fois le rebond terminé, elle n’est plus soumise qu’à la pesanteur (configuration a) avec une vitesse initiale \({V}_{1}\) .
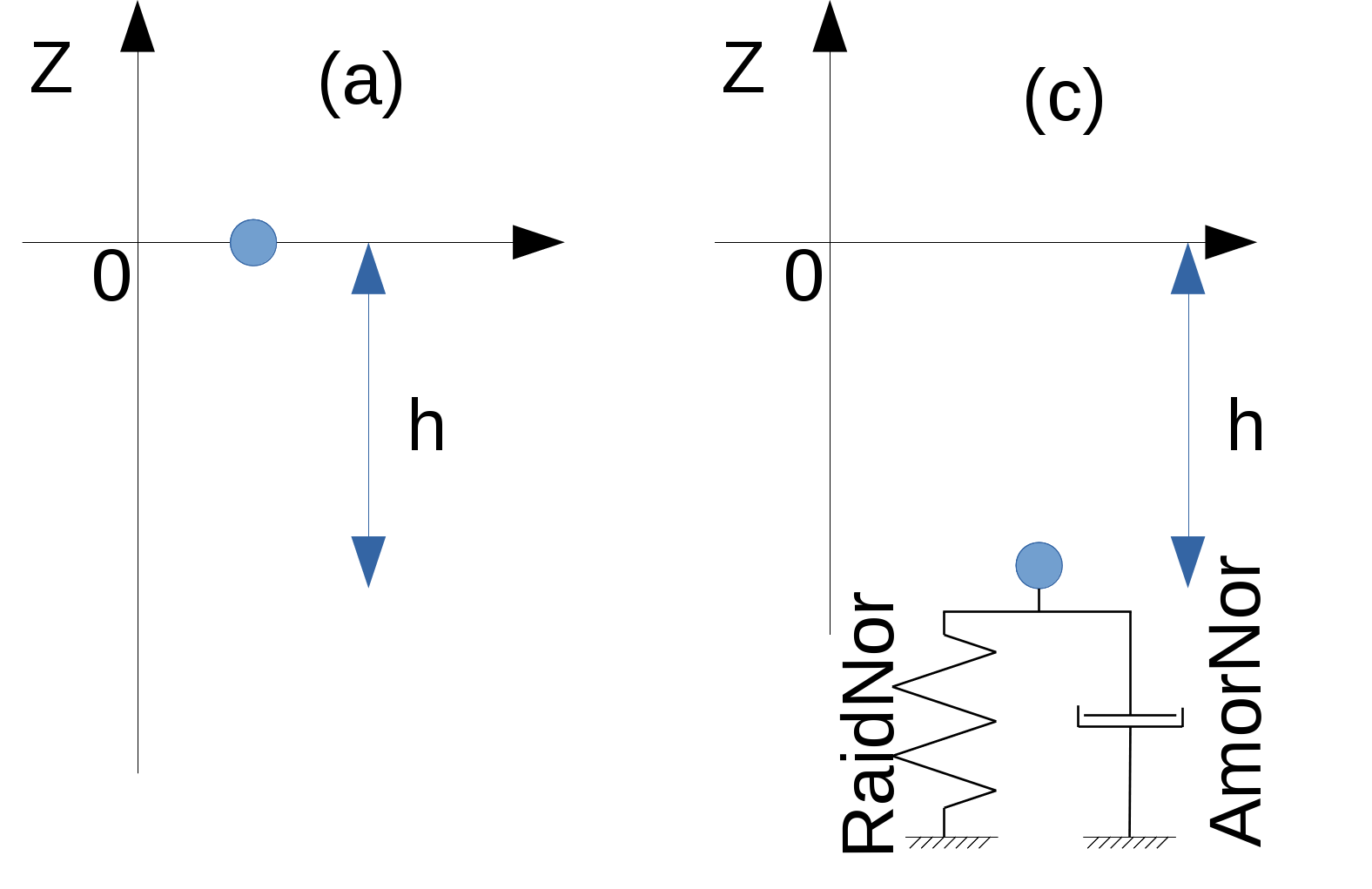
Tableau 2.2.1-1 : Modèle de comportement
Équation pendant la chute libre(configuration a)
Équation pendant le rebond (configuration c):
Incertitude sur les solutions#
Aucune incertitude (solution analytique).
Modélisations A et C#
Grandeurs testées et résultats#
Avec les données précédentes:
Temps [sec] |
Depl [m] |
Tolérance |
Temps Chute = 0.54031242374329 |
-2.0 |
1.0e-06 |
Temps Décollement = 0.88545615307643 |
-2.0 |
1.0e-02 |
1.0000 |
-1.332162981855 |
1.0e-02 |
1.1000 |
-0.856394405035 |
2.0e-02 |

Fig. 566 Comparaison des résultats obtenus avec la modélisation A avec la solution analytique.#
Modélisation B et D#
Grandeurs testées et résultats#
Avec les données précédentes:
Temps [sec] |
Depl [m] |
Tolérance |
Temps Chute = 0.54031242374329 |
-2.0 |
1.0E-06 |
Temps Décollement = 0.92403882542 |
-2.0 |
1.0E-02 |
1.0000 |
-1.88214079833 |
1.0E-02 |
1.1000 |
-1.81496422497 |
1.0E-02 |

Fig. 567 Comparaison des résultats obtenus avec la modélisation B avec la solution analytique.#
Synthèse des résultats#
Très bonne concordance avec les résultats analytiques.