r7.01.13 Loi CJS en géomécanique#
Résumé:
On présente ici la loi CJS qui s’applique à la mécanique des sols. On précise:
la description du modèle,
l’intégration de la loi dans code_aster ,
la description des routines introduites.
Fonctionnalit_s_et_v_rification Description_des_versions_du_document
Introduction#
Le modèle CJS est une loi de comportement élasto-plastique adaptée à la modélisation des matériaux granulaires. Elle a été développée à l’École Centrale de Lyon ([bib1], [bib2], [bib3]).
La version CJS implantée dans code_aster est un modèle hiérarchisé comprenant plusieurs niveaux de complexité. Dans son expression la plus complète, le modèle possède deux surfaces de charge: l’une est activée par les sollicitations isotropes, l’autre par les sollicitations déviatoires. La première subit un écrouissage isotrope et la seconde un écrouissage mixte (isotrope et cinématique). La loi élastique est de type hypoélastique non linéaire.
Description de la loi CJS#
Partition des déformations#
L’incrément de déformation globale se décompose en trois parties, relatives à chacun des mécanismes mis en jeu:
\({\dot{\varepsilon}}_{ij}={\dot{\varepsilon}}_{ij}^{e}+{\dot{\varepsilon}}_{ij}^{\text{ip}}+{\dot{\varepsilon}}_{ij}^{\text{dp}}\)
où \({\dot{\varepsilon}}_{ij}^{e}\) , \({\dot{\varepsilon}}_{ij}^{\text{ip}}\) et \({\dot{\varepsilon}}_{ij}^{\text{dp}}\) sont respectivement les incréments de déformation élastique, de déformation plastique isotrope et de déformation plastique déviatoire.
Mécanisme élastique#
La partie élastique de la loi est de type hypoélastique, dont l’expression générale est:
\({\dot{\varepsilon}}_{ij}^{e}=\frac{{\dot{s}}_{ij}}{2G}+\frac{{\dot{I}}_{1}}{9K}{\delta}_{ij}\)
où \({I}_{1}\) est le premier invariant des contraintes: \({I}_{1}=\text{tr}(\sigma )\) , \(s\) est la partie déviatoire du tenseur des contraintes, et où \(K\) et \(G\) sont respectivement le module de déformation volumique et le module de cisaillement élastiques. Ceux-ci dépendent de l’état de contraintes selon:
\(K={K}_{o}^{e}{(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{n}\) , \(G={G}_{o}^{e}{(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{n}\)
\({K}_{o}^{e}\) , \({G}_{o}\) , \({P}_{a}\) et \(n\) sont des paramètres du modèle. \({P}_{a}\) est une pression de référence égale à -100 kPa.
Mécanisme plastique isotrope#
La surface de charge correspondante \({f}^{i}\) est, dans l’espace des contraintes principales, un plan perpendiculaire à l’axe hydrostatique, soit:
\({f}^{i}(\sigma ,{Q}_{\text{iso}})=-\frac{({I}_{1}+{Q}_{\text{init}})}{3}+{Q}_{\text{iso}}\)
où \({Q}_{\text{iso}}\) est la force thermodynamique qui dépend de la variable interne \(q\) selon:
\({\dot{Q}}_{\text{iso}}={K}^{p}\dot{q}={K}_{o}^{p}{(\frac{{Q}_{\text{iso}}}{{P}_{a}})}^{n}\dot{q}\)
\({K}_{o}^{p}\) , \({P}_{a}\) et \(n\) sont les paramètres du mécanisme plastique déviatoire (\({P}_{a}\) et \(n\) sont identiques à ceux du mécanisme élastique). La règle de normalité permet d’exprimer l’évolution de la déformation plastique et de la variable d’écrouissage en fonction de l’évolution du multiplicateur plastique \({\lambda}^{i}\) :
\({\dot{\varepsilon}}_{ij}^{\text{ip}}={\dot{\lambda}}^{i}\frac{\partial {f}^{i}}{\partial {\sigma}_{ij}}=-\frac{1}{3}{\dot{\lambda}}^{i}{\delta}_{ij}\) et \(\dot{q}=-{\dot{\lambda}}^{i}\frac{\partial {f}^{i}}{\partial {Q}_{\text{iso}}}=-{\dot{\lambda}}^{i}\)
Compte tenu de la seconde équation, la loi d’écrouissage peut se mettre également sous la forme:
\({\dot{Q}}_{\text{iso}}=-{\dot{\lambda}}^{i}{K}_{o}^{p}{(\frac{{Q}_{\text{iso}}}{{P}_{a}})}^{n}\)
Mécanisme plastique déviatoire#
La surface de charge de ce second mécanisme plastique est une surface convexe à symétrie ternaire définie par l’équation:
\({f}^{d}(\sigma ,R,X)={q}_{\text{II}}h({\theta}_{q})+R({I}_{1}+{Q}_{\text{init}})\)
avec \({q}_{ij}={s}_{ij}-{I}_{1}{X}_{ij}\)
\({q}_{\text{II}}=\sqrt{{q}_{ij}{q}_{ij}}\)
\(h({\theta}_{q})={(1+\gamma \cos(3{\theta}_{q}))}^{1/6}={(1+\gamma \sqrt{54}\frac{\det(q)}{{q}_{\text{II}}^{3}})}^{1/6}\) .
Le scalaire \(R\) et le tenseur \(X\) représentent respectivement le rayon moyen et le centre de la surface de charge dans le plan déviatoire.
\(s\) , \(q\) et \(X\) sont des tenseurs déviatoires. \(\gamma\) est un paramètre qui traduit le comportement dissymétrique des sols en compression et en extension. \(\theta\) est l’angle de Lode.
Cette surface de charge évolue selon deux types d’écrouissage: écrouissage isotrope et écrouissage cinématique.
Remarque :
|

écrouissage isotrope#
La loi d’écrouissage isotrope s’écrit comme suit:
\(\dot{R}=\frac{A{R}_{m}^{2}\dot{r}}{{({R}_{m}+Ar)}^{2}}\)
La force thermodynamique \(R\) est fonction de \(r\) dont l’évolution est donnée par:
\(\dot{r}=-{\dot{\lambda}}^{d}\frac{\partial {f}^{d}}{\partial R}{(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1.5}=-{\dot{\lambda}}^{d}({I}_{1}+{Q}_{\text{init}}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1.5}\)
Par intégration directe de la loi d’écrouissage, il vient:
\(R=\frac{A{R}_{m}r}{{R}_{m}+Ar}\) , soit aussi \(r=\frac{R{R}_{m}}{A({R}_{m}-R)}\)
La loi d’écrouissage peut donc également s’exprimer par:
\(\dot{R}=-{\dot{\lambda}}^{d}A{(1-\frac{R}{{R}_{m}})}^{2}({I}_{1}+{Q}_{\text{init}}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1.5}={\dot{\lambda}}^{d}{G}^{R}(\sigma ,R)\)
avec \({G}^{R}(\sigma ,R)=-A{(1-\frac{R}{{R}_{m}})}^{2}({I}_{1}+{Q}_{\text{init}}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1.5}\)
et où \({R}_{m}\) (qui est le rayon moyen du domaine élastique en rupture) et \(A\) sont des paramètres du modèle.
écrouissage cinématique#
La loi d’écrouissage cinématique est donnée par:
\({\dot{X}}_{ij}=\frac{1}{b}{\dot{\alpha}}_{ij}\)
La force thermodynamique \(X\) est fonction de la variable \(\alpha\) dont l’évolution non linéaire est donnée par:
\({\dot{\alpha}}_{ij}=-{\dot{\lambda}}^{d}\left[\text{dev}(\frac{\partial {f}^{d}}{\partial {X}_{ij}})-({I}_{1}+{Q}_{\text{init}})\phi {X}_{ij}\right]{(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1.5}\)
Le terme \(-({I}_{1}+{Q}_{\text{init}})\phi {X}\) permet d’obtenir l’écrouissage cinématique non linéaire, traduisant la limitation de l’évolution de la surface de charge.
En tenant compte de \(\frac{\partial {f}^{d}}{\partial {X}_{ij}}=\frac{\partial {f}^{d}}{\partial {q}_{kl}}\frac{\partial {q}_{kl}}{\partial {X}_{ij}}=-(I+{Q}_{{\text{init}}_{1}})\frac{\partial {f}^{d}}{\partial {q}_{ij}}\) , et en posant: \({Q}_{ij}=\text{dev}(\frac{\partial {f}^{d}}{\partial {q}_{ij}})\) , il vient finalement pour la loi d’écrouissage:
\({\dot{X}}_{ij}={\dot{\lambda}}^{d}\frac{1}{b}({Q}_{ij}+\phi {X}_{ij})({I}_{1}+{Q}_{\text{init}}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1.5}={\dot{\lambda}}^{d}{G}_{ij}^{X}(\sigma ,X)\)
avec \({G}_{ij}^{X}(\sigma ,X)=\frac{1}{b}({Q}_{ij}+\phi {X}_{ij})({I}_{1}+{Q}_{\text{init}}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1.5}\) .
où \(\phi\) une fonction qui limite l’évolution de \(X\) et est un paramètre du modèle.
Le tenseur \(Q\) se calcule selon la formule:
\({Q}_{ij}=\frac{1}{h{(\theta )}^{5}}\left[(1+\frac{\gamma}{2}\cos(3\theta ))\frac{{q}_{ij}}{{q}_{\text{II}}}+\frac{\gamma \sqrt{54}}{{\mathrm{6q}}_{\text{II}}^{2}}\text{dev}(\frac{\partial \det(q)}{\partial {q}_{ij}})\right]\)
L’expression précédente s’obtient de la façon suivante. On a:
\(\frac{\partial {f}^{d}}{\partial {q}_{ij}}=h({\theta}_{q})\frac{\partial {q}_{\text{II}}}{\partial {q}_{ij}}+{q}_{\text{II}}\frac{\partial h({\theta}_{q})}{\partial {q}_{ij}}\)
où \(\frac{\partial {q}_{\text{II}}}{\partial {q}_{ij}}\) et \(\frac{\partial h({\theta}_{q})}{\partial {q}_{ij}}\) sont respectivement donnés par:
\(\frac{\partial {q}_{\text{II}}}{\partial {q}_{ij}}=\frac{{q}_{ij}}{{q}_{\text{II}}}\)
\(\frac{\partial h({\theta}_{q})}{\partial {q}_{ij}}=\frac{1}{6h{({\theta}_{q})}^{5}}\frac{\partial}{\partial {q}_{ij}}(1+\gamma \sqrt{54}\frac{\det(q)}{{q}_{\text{II}}^{3}})=\frac{-\gamma \cos(3{\theta}_{q})}{\mathrm{2h}({\theta}_{q}{)}^{5}}\frac{{q}_{ij}}{{q}_{\text{II}}^{2}}+\frac{\gamma \sqrt{54}}{\mathrm{6h}({\theta}_{q}{)}^{5}{q}_{\text{II}}^{3}}\frac{\partial \det(q)}{\partial {q}_{ij}}\)
d’où
\(\frac{\partial {f}^{d}}{\partial {q}_{ij}}=\frac{1}{h{({\theta}_{q})}^{5}}\left[(1+\frac{\gamma}{2}\cos(3{\theta}_{q}))\frac{{q}_{ij}}{{q}_{\text{II}}}+\frac{\gamma \sqrt{54}}{{\mathrm{6q}}_{\text{II}}^{2}}(\frac{\partial \det(q)}{\partial {q}_{ij}})\right]\)
La fonction \(\phi\) est, quant à elle donnée par:
\(\varphi ={\varphi}_{o}h({\theta}_{s}){Q}_{\text{II}}\)
où \({Q}_{\text{II}}=\sqrt{{Q}_{ij}{Q}_{ij}}\) et \(h({\theta}_{s})={(1+\gamma \cos(3{\theta}_{s}))}^{1/6}={(1+\gamma \sqrt{54}\frac{\det(s)}{{s}_{\text{II}}^{3}})}^{1/6}\) . Le terme \({\phi }_{o}\) s’exprime en fonction de caractéristique à la rupture du matériau.
Loi d’évolution du mécanisme plastique déviatoire#
Dans les matériaux granulaires, une variation de volume peut se produire pour un chargement purement déviatoire. Cette variation de volume est liée à l’aspect discontinu du matériau et aux conditions cinématique qui résultent lors du chargement. Ce phénomène particulier ne permet pas de définir les déformations plastiques déviatoires à partir de la seule règle de normalité. C’est pourquoi le mécanisme plastique déviatoire est non associé. Il existe donc une fonction potentielle pilotant l’évolution des déformations:
\({\dot{\varepsilon}}_{ij}^{\text{dp}}={\dot{\lambda}}^{d}{G}_{ij}^{d}\)
La fonction potentielle est définie à partir de la condition cinématique suivante:
\({\dot{\varepsilon}}_{v}^{\text{dp}}=-\beta (\frac{{s}_{\text{II}}}{{s}_{\text{II}}^{c}}-1)\frac{\mid {s}_{ij}{\dot{e}}_{ij}^{\text{dp}}\mid }{{s}_{\text{II}}}\)
où \(\mathrm{\beta }\) est un paramètre du modèle et \({s}_{\text{II}}^{c}\) représente l’état de contrainte caractéristique. Une surface, de forme identique à la surface de charge dans l’espace des contraintes, sépare les états contractants des états dilatants. Cette surface, dite caractéristique, a pour équation:
\({f}^{c}={s}_{\text{II}}^{c}h({\theta}_{s})+{R}_{c}({I}_{1}+{Q}_{\text{init}})\)
où \({R}_{c}\) est un paramètre correspondant au rayon moyen de cette surface caractéristique. La condition cinématique peut aussi se mettre sous la forme:
\(\begin{array}{}{\dot{\varepsilon}}_{v}^{\text{dp}}+\beta (\frac{{s}_{\text{II}}}{{s}_{\text{II}}^{c}}-1)\frac{\mid {s}_{ij}{\dot{e}}_{ij}^{\text{dp}}\mid }{{s}_{\text{II}}}={\dot{\varepsilon}}_{v}^{\text{dp}}+\beta (\frac{{s}_{\text{II}}}{{s}_{\text{II}}^{c}}-1)\frac{\mid {s}_{ij}{\dot{e}}_{ij}^{\text{dp}}\mid }{{s}_{ij}{\dot{e}}_{ij}^{\text{dp}}}\frac{{s}_{ij}{\dot{e}}_{ij}^{\text{dp}}}{{s}_{\text{II}}}\\ ={\dot{\varepsilon}}_{v}^{\text{dp}}+\frac{{\beta }^{'}}{{s}_{\text{II}}}{s}_{ij}{\dot{e}}_{ij}^{\text{dp}}\\ ={{\dot{\varepsilon}}_{v}^{\text{dp}}+\frac{{\beta }^{'}}{{s}_{\text{II}}}{s}_{ij}\dot{\varepsilon}}_{ij}^{\text{dp}}=0\end{array}\)
où \({\beta }^{'}=\beta (\frac{{s}_{\text{II}}}{{s}_{\text{II}}^{c}}-1)\text{signe}({s}_{ij}{\dot{\varepsilon}}_{ij}^{\text{dp}})\) .
Il est alors possible de chercher à exprimer cette condition cinématique à partir d’un tenseur \(n\) sous la forme:
\({\dot{\varepsilon}}_{ij}^{\text{dp}}{n}_{ij}=0\)
c’est-à-dire, après décomposition de chaque terme en parties déviatoire et hydrostatique:
\({\dot{\varepsilon}}_{ij}^{\text{dp}}{n}_{ij}=({\dot{e}}_{ij}^{\text{dp}}+\frac{1}{3}{\dot{\varepsilon}}_{v}^{\text{dp}}{\delta}_{ij})({n}_{1}{s}_{ij}+{n}_{2}{\delta}_{ij})={n}_{1}{s}_{ij}{\dot{e}}_{ij}^{\text{dp}}+{n}_{2}{\mathrm{dt}\varepsilon }_{v}^{\text{dp}}=0\)
On en déduit la relation \(\frac{{n}_{1}}{{n}_{2}}=\frac{{\beta }^{'}}{{s}_{\text{II}}}\) , qui ajouté à la condition de normalisation \(n:n=1\) , conduit aux expressions:
\({n}_{1}=\frac{\frac{{\beta }^{'}}{{s}_{\text{II}}}}{\sqrt{{\beta }^{'2}+3}}\) et \({n}_{2}=\frac{1}{\sqrt{{\beta }^{'2}+3}}\) , soit \({n}_{ij}=\frac{{\beta }^{'}\frac{{s}_{ij}}{{s}_{\text{II}}}+{\delta}_{ij}}{\sqrt{{\beta }^{'2}+3}}\)
La loi d’évolution de \({\dot{\varepsilon}}_{ij}^{\text{dp}}\) doit être telle que la condition cinématique soit satisfaite. Il est donc proposé de prendre la projection de \({\dot{\varepsilon}}_{ij}^{\text{dp}}\) sur l’hypersurface de déformation de normale \(n\) , soit:
\({\dot{\varepsilon}}_{ij}^{\text{dp}}={\dot{\lambda}}^{d}(\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}-(\frac{\partial {f}^{d}}{\partial {\sigma}_{kl}}{n}_{kl}){n}_{ij})={\dot{\lambda}}^{d}{G}_{ij}^{d}\)
avec \({G}_{ij}^{d}=\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}-(\frac{\partial {f}^{d}}{\partial {\sigma}_{kl}}{n}_{kl}){n}_{ij}\) .
Par ailleurs, pour le calcul du potentiel, on peut noter que:
\(\begin{array}{}\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}=\frac{\partial {f}^{d}}{\partial {q}_{kl}}\frac{\partial {q}_{kl}}{\partial {\sigma}_{ij}}+R{\delta}_{ij}\\ =\left[\text{dev}(\frac{\partial {f}^{d}}{\partial {q}_{kl}})+\frac{1}{3}\frac{\partial {f}^{d}}{\partial {q}_{\text{mm}}}{\delta}_{kl}\right]\left[{\delta}_{\text{ik}}{\delta}_{\text{jl}}-{\delta}_{ij}(\frac{1}{3}{\delta}_{kl}+{X}_{kl})\right]+R{\delta}_{ij}\\ ={Q}_{kl}{\delta}_{\text{ik}}{\delta}_{\text{jl}}-{\delta}_{ij}(\frac{1}{3}{Q}_{kl}{\delta}_{kl}+{Q}_{kl}{X}_{kl})+\frac{1}{3}\frac{\partial {f}^{d}}{\partial {q}_{\text{mm}}}\left[{\delta}_{\text{ik}}{\delta}_{\text{jl}}{\delta}_{kl}-{\delta}_{ij}(\frac{1}{3}{\delta}_{kl}{\delta}_{kl}+{\delta}_{kl}{X}_{kl})\right]+R{\delta}_{ij}\\ ={Q}_{ij}-({Q}_{kl}{X}_{kl}-R){\delta}_{ij}\end{array}\)
Surface de rupture#
L’état de rupture résulte de la nature non linéaire des lois d’écrouissage et de l’existence de valeurs limites associées aux variables d’écrouissage \(R\) et \(X\) . La limite de \(R\) , notée \({R}_{m}\) , est atteinte lorsque \(r\) tend vers l’infini. La limite de \({X}_{ij}\) est atteinte lorsque \({\dot{X}}_{ij}\) devient nul.
Dans ces conditions:
\({Q}_{ij}=\phi {X}_{ij}\) et \({Q}_{\text{II}}=\phi {X}_{\text{II}\lim}\Rightarrow {X}_{\text{II}\lim}=\frac{1}{{\phi }_{o}h({\theta}_{s})}\)
à l’état de rupture on a donc (Fig. 206):
\({q}_{\text{II}}=\frac{{s}_{\text{II}}+{I}_{1}{X}_{\text{II}\lim}\cos\alpha }{\cos({\theta}_{s}-{\theta}_{q})}\)
En remplaçant cette expression et la valeur de \(R\) en rupture, dans l’équation de la surface de charge en rupture, on obtient l’équation d’une enveloppe limite pour les surfaces de charge:
\({f}^{r}={s}_{\text{II}}h({\theta}_{s})+{R}_{r}({I}_{1}+{Q}_{\text{init}})=0\)
avec \({R}_{r}=\frac{\cos\alpha }{{\phi }_{o}}+\frac{h({\theta}_{s})}{h({\theta}_{q})}{R}_{m}\cos({\theta}_{s}-{\theta}_{q})\) , rayon moyen de l’enveloppe, qui se détermine à partir des caractéristiques mécaniques à la rupture du matériau. La valeur de \({\phi }_{o}\) peut alors en être déduite:
\({\phi }_{o}=\frac{\cos\alpha }{{R}_{r}-\frac{h({\theta}_{s})}{h({\theta}_{q})}{R}_{m}\cos({\theta}_{s}-{\theta}_{q})}\)
avec \(\cos\alpha =\frac{{q}_{\text{II}}^{2}-{s}_{\text{II}}^{2}-{({I}_{1}{X}_{\text{II}})}^{2}}{2{s}_{\text{II}}{I}_{1}{X}_{\text{II}}}\)

Fig. 206 Représentation des surfaces de rupture, caractéristique et de charge dans le plan déviatoire#
Par ailleurs, \({R}_{r}\) est lié à l’angle de frottement maximal et dépend de la contrainte moyenne et de la densité relative. Pour prendre en compte la dépendance de l’angle de frottement maximal en fonction de la contrainte moyenne et de la densité relative, on considère la relation:
\({R}_{r}={R}_{c}+\mu \ln(\frac{3{p}_{c}}{{I}_{1}+{Q}_{\text{init}}})\)
où \({R}_{c}\) et \(\mu\) sont des paramètres du modèle. \({p}_{c}\) est la contrainte moyenne critique, c’est-à-dire la contrainte moyenne minimale (elle est négative avec notre convention de signe) connue par le matériau au cours de son histoire. Elle dépend de la densité relative initiale selon la notion classique de droite critique dans le plan \((e,\ln\mid p\mid )\) :
\({p}_{c}={p}_{\text{co}}\exp(-c{\varepsilon}_{v})\)
où \({p}_{\text{co}}\) est la pression critique initiale et \(1/c\) est la pente de la droite d’état critique dans le plan \((\mid {\varepsilon}_{v}\mid ,\ln\mid p\mid )\) .
Hiérarchisation du modèle#
Description sommaire des trois niveaux CJS#
À partir de la description complète du modèle donnée ci-dessus, on déduit trois niveaux de complexité croissante dont les caractéristiques sont résumées dans le tableau suivant:
Mécanisme élastique |
Mécanisme plastique isotrope |
Mécanisme plastique déviatoire |
|
CJS1 |
linéaire |
non activé |
activé, plasticité parfaite |
CJS2 |
non linéaire |
activé |
activé, écrouissage isotrope |
CJS3 |
non linéaire |
activé |
activé, écrouissage cinématique |
Bilan des paramètres CJS#
Par ailleurs, on peut également résumer la correspondance entre les différents niveaux du modèle et les paramètres associés à chacun d’eux:
\(n\) |
\({K}_{o}^{e}\) |
\({G}_{o}^{e}\) |
\({K}^{p}\) |
\(\gamma\) |
\(\beta\) |
\({R}_{c}\) |
\(A\) |
\(b\) |
\({R}_{m}\) |
\(\mu\) |
\({p}_{\text{co}}\) |
\(c\) |
\({p}_{a}\) |
|
CJS1 |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
||||||||
CJS2 |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
||||
CJS3 |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
\(\times\) |
Dans code_aster , les paramètres élastiques du modèle CJS (\({K}_{o}^{e}\) et \({G}_{o}\) ) sont directement pris en compte dans les caractéristiques élastiques du matériau, c’est-à-dire à travers le module de Young \(E\) et le coefficient de Poisson \(\mathit{NU}\) .
Dans code_aster , l’utilisateur n’indique pas de façon explicite le niveau CJS qu’il choisi. C’est en effet le choix des différents paramètres qui détermine le niveau correspondant. Nous avons pour résumer les tests logiques suivants qui sont intégrés dans le code:
si \(n=0\) alors niveau CJS1,
si (\(n\ne 0\) et \(A\ne 0\) ) alors niveau CJS2,
si (\(n\ne 0\) et \(A=0\) ) alors niveau CJS3.
Remarque:
L’utilisateur doit fixer la valeur de \({P}_{a}\) égale à \(-100\mathit{kPa}\) en fonction des unités choisies. En outre, pour CJS3, la valeur de \({p}_{\mathit{co}}\) doit être négative.
Correspondance avec la cohésion et l’angle de frottement#
Les mécaniciens des sols ont l’habitude d’utiliser les notions de cohésion Cohésion \(c\) , d’angle de frottement \(\varphi\) et d’angle de dilatance: \(\psi\) . Ces paramètres sont utilisés dans la loi de Mohr Coulomb.
Le niveau 1 de la loi CJS permet de retrouver un comportement très voisin en faisant le choix suivant de paramètres:
\({(\frac{1-\gamma }{1+\gamma })}^{1/6}=\frac{3-\sin(\varphi )}{3+\sin(\varphi )}\)
\({R}_{m}=\frac{2\sqrt{\frac{2}{3}}\sin(\varphi ){(1-\gamma )}^{1/6}}{3-\sin(\varphi )}\)
\({Q}_{\mathit{init}}=-3c\text{cotan}(\varphi )\)
\(\beta =\frac{-2\sqrt{6}\sin\psi }{3–\sin\psi }\)
Intégration de la loi CJS#
Nous détaillons ci-dessous l’intégration de la loi CJS en fonction du ou des mécanismes activés:
élastique non linéaire,
élastique non linéaire et plastique isotrope
élastique non linéaire et plastique déviatoire
élastique non linéaire, plastique isotrope et plastique déviatoire.
Dans chaque cas, le but est de calculer, à partir des champs connus à l’état moins \({\varepsilon}^{-}\) , \({\sigma}^{-}\) et de l’incrément de déformation \(\Delta \varepsilon\) , le nouvel état de contrainte \({\sigma}^{+}\) .
Dans l’enchaînement des calculs, on commence par faire l’hypothèse que seul le mécanisme élastique non linéaire intervient. On réalise donc une prédiction élastique. Cette prédiction est ensuite utilisée pour calculer les fonctions de charge \({f}^{i}\) et \({f}^{d}\) , on cherche à savoir si l’on va alors au-delà des seuils:
si \({f}^{i}\le 0\) et \({f}^{d}\le 0\) , la prédiction élastique est retenue comme nouvel état de contrainte,
si \({f}^{i}>0\) et \({f}^{d}\le 0\) , on fait l’intégration des mécanismes élastique non linéaire et plastique isotrope,
si \({f}^{i}\le 0\) et \({f}^{d}>0\) , on fait l’intégration des mécanismes élastique non linéaire et plastique déviatoire,
si \({f}^{i}>0\) et \({f}^{d}>0\) , on fait l’intégration des mécanismes élastique non linéaire, plastique isotrope et plastique déviatoire.
En sortie du calcul élasto-plastique, lorsqu’un seul seuil plastique a été initialement dépassé, on recalcule chacune des fonctions de charge. En effet, il est possible qu’en cherchant à se ramener sur l’un des seuils, on dépasse alors l’autre seuil non activé initialement par la prédiction élastique. Dans ce cas, on résout alors en intégrant tous les mécanismes.
Choix des variables internes#
Les variables \(q\) , \(r\) et \(\alpha\) sont équivalentes aux forces thermodynamiques associées \({Q}_{\text{iso}}\) , \(R\) et \(X\) . Pour cette raison et puisque leur signification géométrique est plus évidente, nous retiendrons comme variables internes pour l’intégration de la loi CJS, les grandeurs \({Q}_{\text{iso}}\) , \(R\) et \(X\) .
Par ailleurs, nous ajoutons au nombre des variables internes:
le signe du produit \({s}_{ij}{\varepsilon}_{ij}^{\text{dp}}\)
l’état élastique ou élasto-plastique du matériau, en notant:
0: état élastique
1: état élasto-plastique, mécanisme plastique isotrope
2: état élasto-plastique, mécanisme plastique déviatoire
3: état élasto-plastique, mécanismes plastiques isotrope et déviatoire
Finalement, les variables internes sont stockées dans un vecteur VI dans l’ordre suivant:
Indice de variable interne |
CJS1 |
CJS2 |
CJS3 |
|
3D |
2D |
CJS1 |
CJS2 |
CJS3 |
1 |
1 |
\({Q}_{\text{iso}}=\infty\) |
\({Q}_{\text{iso}}\) |
\({Q}_{\text{iso}}\) |
2 |
2 |
\(R={R}_{m}\) |
\(R\) |
\(R={R}_{m}\) |
3 |
3 |
0 |
0 |
\({X}_{11}\) |
4 |
4 |
0 |
0 |
\({X}_{22}\) |
5 |
5 |
0 |
0 |
\({X}_{33}\) |
6 |
6 |
0 |
0 |
\(\sqrt{2}{X}_{12}\) |
7 |
– |
0 |
0 |
\(\sqrt{2}{X}_{13}\) |
8 |
– |
0 |
0 |
\(\sqrt{2}{X}_{23}\) |
9 |
7 |
\(\frac{{q}_{\text{II}}h({\theta}_{q})}{\mid {R}_{m}({I}_{1}+{Q}_{\text{init}})\mid }\) |
\(\frac{{q}_{\text{II}}h({\theta}_{q})}{\mid R({I}_{1}+{Q}_{\text{init}})\mid }\) |
\(\frac{{q}_{\text{II}}h({\theta}_{q})}{\mid {R}_{m}({I}_{1}+{Q}_{\text{init}})\mid }\) |
10 |
8 |
\(\frac{R}{{R}_{m}}\) |
\(\frac{{X}_{\text{II}}}{{X}_{\text{II}}^{\lim}}\) |
|
11 |
9 |
\(\mid \frac{\mathrm{3Q}}{{I}_{1}+{Q}_{\text{init}}}\mid\) |
\(\mid \frac{\mathrm{3Q}}{{I}_{1}+{Q}_{\text{init}}}\mid\) |
|
12 |
10 |
Nombre d’itérations internes |
Nombre d’itérations internes |
Nombre d’itérations internes |
13 |
11 |
test local atteint |
test local atteint |
test local atteint |
14 |
12 |
nbre de redécoupage |
nbre de redécoupage |
nbre de redécoupage |
15 |
13 |
\(\text{signe}({s}_{ij}{\varepsilon}_{ij}^{\text{dp}})\) |
\(\text{signe}({s}_{ij}{\varepsilon}_{ij}^{\text{dp}})\) |
\(\text{signe}({s}_{ij}{\varepsilon}_{ij}^{\text{dp}})\) |
16 |
14 |
0,1,2,3 état du matériau |
0,1,2,3 état du matériau |
0,1,2,3 état du matériau |
Intégration du mécanisme élastique non linéaire#
Dans le cas élastique, le nouvel état de contrainte \({\sigma}^{+}\) , vérifie simplement:
\({\sigma}_{ij}^{+}={\sigma}_{ij}^{-}+{D}_{ijkl}({\sigma}^{+})\Delta {\varepsilon}_{kl}\)
La dépendance du tenseur d’élasticité non linéaire en fonction de l’état de contraintes se résume en fait à:
\({D}_{ijkl}({\sigma}^{+})={D}_{ijkl}^{\text{lineaire}}{(\frac{{I}_{1}^{+}+{Q}_{\text{init}}}{3{P}_{a}})}^{n}\)
où \({D}_{ijkl}^{\text{lineaire}}\) est le tenseur d’élasticité linéaire isotrope classique, obtenu à partir de \({K}_{o}^{e}\) et \({G}_{o}\) ou par équivalence à partir de E et Nu.
De cette relation, on déduit en particulier que le premier invariant des contraintes satisfait à:
\({I}_{1}^{+}-{I}_{1}^{-}-3{K}_{o}^{e}{(\frac{{I}_{1}^{+}+{Q}_{\text{init}}}{3{P}_{a}})}^{n}\text{tr}(\Delta \varepsilon )=0\)
Cette équation non linéaire est résolue par une méthode de la sécante pour CJS2 et CJS3, en différenciant les cas suivant le signe de \(\text{tr}(\Delta \varepsilon )\) . En ce qui concerne le modèle CJS1, pour lequel le paramètre \(n\) est nul, la résolution explicite est immédiate, puisque l’on a alors
\({I}_{1}^{+}={I}_{1}^{-}+3{K}_{o}^{e}\text{tr}(\Delta \varepsilon )\)
Dans le cas général, la connaissance de \({I}_{1}^{+}\) et donc du terme \({(\frac{{I}_{1}^{+}+{Q}_{\text{init}}}{3{P}_{a}})}^{n}\) permet de définir l’opérateur d’élasticité non linéaire \({D}_{ijkl}({\sigma}^{+})\) . L’obtention du nouvel état de contrainte est alors directe.
Intégration des mécanismes élastique non linéaire et plastique isotrope#
Dans ce cas, le nouvel état de contrainte \({\sigma}^{+}\) , vérifie:
\({\sigma}_{ij}^{+}={\sigma}_{ij}^{-}+{D}_{ijkl}({\sigma}^{+})(\Delta {\varepsilon}_{kl}-\Delta {\varepsilon}_{kl}^{\text{ip}})\)
Étant donné la forme simple, des déformations plastiques du mécanisme plastique isotrope:
\(\Delta {\varepsilon}_{ij}^{\text{ip}}=-\frac{1}{3}\Delta {\lambda}^{i}{\delta}_{ij}\)
le système non linéaire à résoudre est composé de:
\({\text{LE}}_{ij}\) : la loi état élastique: \({\sigma}_{ij}^{+}-{\sigma}_{ij}^{-}-{D}_{ijkl}({\sigma}^{+})(\Delta {\varepsilon}_{kl}+\frac{1}{3}\Delta {\lambda}^{i}{\delta}_{kl})=0\)
\(\text{LQ}\) : la loi d’écrouissage de la variable interne \({Q}_{\text{iso}}\) : \({Q}_{\text{iso}}^{+}-{Q}_{\text{iso}}^{-}-\Delta {\lambda}^{i}{G}^{{Q}_{\text{iso}}}({Q}_{\text{iso}}^{+})=0\)
\(\text{FI}\) : l’équation de la surface de charge isotrope: \(-\frac{{I}_{1}^{+}+{Q}_{\text{init}}}{3}+{Q}_{\text{iso}}^{+}=0\)
Schématiquement, on cherche donc à résoudre le système \(R(Y)=0\) , où l’inconnue \(Y\) est donnée par \(Y=({\sigma}_{ij}^{+},{Q}_{\text{iso}}^{+},\Delta {\lambda}^{i})\) et où \(R=({\text{LE}}_{ij},\text{LQ},\text{FI})\) . La résolution de \(R(Y)=0\) se fait par la méthode de Newton:
initialisation et calcul d’une solution d’essai
itérations de Newton: résolution de \(\frac{\text{DR}}{\text{DY}}({Y}^{p}){\text{DY}}^{\text{p+1}}=-R({Y}^{p})\)
test de convergence: si convergence \(Y={Y}^{p}\) ; sinon \({Y}^{\text{p+1}}={Y}^{p}+{\text{DY}}^{\text{p+1}}\) et \(p=p+1\)
Nous détaillons ci-dessous ces trois étapes.
Initialisation et solution d’essai#
Nous prenons simplement pour \({Y}^{0}=({\sigma}_{ij}^{0},{Q}_{\text{iso}}^{0},\Delta {\lambda}^{{i}^{0}})\) , les valeurs suivantes:
\({\sigma}_{ij}^{0}={\sigma}_{ij}^{\text{elas}}\) : contraintes données par la prédiction élastique,
\({Q}_{\text{iso}}^{0}={Q}_{\text{iso}}^{-}\) : variable interne à t
\(\Delta {\lambda}^{{i}^{0}}=0\) : multiplicateur plastique nul
Contrairement aux autres mécanismes élasto-plastiques, on ne calcule pas ici de solution d’essai.
Itérations de Newton#
La résolution de \(\frac{\text{DR}}{\text{DY}}({Y}^{p}){\text{DY}}^{\text{p+1}}=-R({Y}^{p})\) nécessite naturellement le calcul des dérivées de \({\text{LE}}_{ij}\) , \(\text{LQ}\) et \(\text{FI}\) par rapport à chaque composant de \(Y\) . On a:
\(\frac{\text{DR}}{\text{DY}}=\left[\begin{array}{ccc}\frac{\partial {\text{LE}}_{ij}}{\partial {\sigma}_{kl}}& \frac{\partial {\text{LE}}_{ij}}{\partial {Q}_{\text{iso}}}& \frac{\partial {\text{LE}}_{ij}}{\partial \Delta {\lambda}^{i}}\\ \frac{\partial \text{LQ}}{\partial {\sigma}_{kl}}& \frac{\partial \text{LQ}}{\partial {Q}_{\text{iso}}}& \frac{\partial \text{LQ}}{\partial \Delta {\lambda}^{i}}\\ \frac{\partial \text{FI}}{\partial {\sigma}_{kl}}& \frac{\partial \text{FI}}{\partial {Q}_{\text{iso}}}& \frac{\partial \text{FI}}{\partial \Delta {\lambda}^{i}}\end{array}\right]\)
avec:
\(\frac{\partial {\text{LE}}_{ij}}{\partial {\sigma}_{kl}\delta }={\delta}_{\text{ik}}{\delta}_{\text{jl}}-\frac{\partial {D}_{\text{ijmn}}}{\partial {\sigma}_{kl}}(\Delta {\epsilon}_{\text{mn}}+\frac{1}{3}\Delta {\lambda}^{i}{\delta}_{\text{mn}})={\delta}_{\text{ik}}{\delta}_{\text{jl}}-{D}_{\text{ijmn}}^{\text{lineaire}}(\Delta {\epsilon}_{\text{mn}}+\frac{1}{3}\Delta {\lambda}^{i}{\delta}_{\text{mn}})\frac{n}{3{P}_{a}}{(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{n-\delta }{\delta}_{kl}\)
\(\frac{\partial {\text{LE}}_{ij}}{\partial {Q}_{\text{iso}}}=0\)
\(\frac{\partial {\text{LE}}_{ij}}{\partial \Delta {\lambda}^{i}}=-\frac{1}{3}{D}_{\text{ijmn}}{\delta}_{\text{mn}}\)
\(\frac{\partial \text{LQ}}{\partial {\sigma}_{kl}}=0\)
\(\frac{\partial \text{LQ}}{\partial {Q}_{\text{iso}}}=1-\Delta {\lambda}^{i}\frac{\partial {G}^{{Q}_{\text{iso}}}}{\partial {Q}_{\text{iso}}}=1+\Delta {\lambda}^{i}\frac{n{K}_{o}^{p}}{{P}_{a}}{(\frac{{Q}_{\text{iso}}}{{P}_{a}})}^{n-1}\)
\(\frac{\partial \text{LQ}}{\partial \Delta {\lambda}^{i}}=-{G}^{{Q}_{\text{iso}}}\)
\(\frac{\partial \text{FI}}{\partial {\sigma}_{kl}}=-\frac{1}{3}{\delta}_{kl}\)
\(\frac{\partial \text{FI}}{\partial {Q}_{\text{iso}}}=1\)
\(\frac{\partial \text{FI}}{\partial \Delta {\lambda}^{i}}=0\)
Test de convergence#
Les itérations de Newton sont poursuivies tant que l’erreur relative \(\frac{\parallel {\text{DY}}^{\text{p+1}}\parallel }{\parallel {Y}^{\text{p+1}}-{Y}^{0}\parallel }\) reste supérieure à la tolérance admise par l’utilisateur et définie par le mot clé RESI_INTE_RELA. La norme utilisée ici est la norme vectorielle: \(\parallel x\parallel =\sqrt{\sum_{i}{x}_{i}^{2}}\) .
Intégration des mécanismes élastique non linéaire et plastique déviatoire#
Dans ce cas, le nouvel état de contrainte \({\sigma}^{+}\) , vérifie:
\({\sigma}_{ij}^{+}={\sigma}_{ij}^{-}+{D}_{ijkl}({\sigma}^{+})(\Delta {\varepsilon}_{kl}-\Delta {\varepsilon}_{kl}^{\text{dp}})\)
Les déformations plastiques du mécanisme plastique déviatoire sont données par le potentiel \({G}^{d}\) :
\(\Delta {\varepsilon}_{ij}^{\text{dp}}=\Delta {\lambda}^{d}{G}_{ij}^{d}\)
On en déduit que le système non linéaire à résoudre est composé de:
\({\text{LE}}_{ij}\) : la loi état élastique: \({\sigma}_{ij}^{+}-{\sigma}_{ij}^{-}-{D}_{ijkl}({\sigma}^{+})(\Delta {\varepsilon}_{kl}-\Delta {\lambda}^{d}{G}_{kl}^{d}({\sigma}^{+},{R}^{+},{X}^{+}))=0\)
\(\text{LR}\) : la loi d’écrouissage de la variable \(R\) : \({R}^{+}-{R}^{-}-{\Delta}^{d}{G}^{R}({\sigma}^{+},{R}^{+})=0\)
\({\text{LX}}_{ij}\) : la loi d’écrouissage de la variable \({X}_{ij}\) : \({X}_{ij}^{+}-{X}_{ij}^{-}-\Delta {\lambda}^{d}{G}^{X}({\sigma}^{+},{X}^{+})=0\)
\(\text{FD}\) : l’équation de la surface de charge déviatoire: \({q}_{\text{II}}^{+}h({\theta}_{q}^{+})+{R}^{+}({I}_{1}^{+}+{Q}_{\text{init}})=0\)
Comme au paragraphe précédant on résout par la méthode de Newton le système \(R(Y)=0\) , où l’inconnue \(Y\) est donnée par \(Y=({\sigma}_{ij}^{+},{R}^{+},{X}_{ij}^{+},\Delta {\lambda}^{d})\) et où \(R=({\text{LE}}_{ij},\text{LR},{\text{LX}}_{ij},\text{FD})\) .
Initialisation et solution d’essai#
À partir de l’état à l’instant t \(({\sigma}_{ij}^{-},{R}^{-},{X}_{ij}^{-})\) , nous cherchons une solution d’essai qui nous rapproche de la solution finale. Pour cela nous résolvons l’équation suivante:
\({f}^{d}({\sigma}_{ij}^{-}+{D}_{ijkl}^{-}(\Delta {\varepsilon}_{kl}-\Delta {\lambda}^{d}{G}_{kl}^{d-}),{R}^{-}+\Delta {\lambda}^{d}{G}^{R-},{X}_{ij}^{-}+\Delta {\lambda}^{d}{G}_{ij}^{X-})=0\)
avec \({D}_{ijkl}^{-}={D}_{ijkl}({\sigma}^{-})\) , \({G}_{kl}^{d-}={G}_{kl}^{d}({\sigma}^{-},{R}^{-},{X}^{-})\) , \({G}^{R-}={G}^{R}({\sigma}^{-},{R}^{-})\) , \({G}_{ij}^{X-}={G}_{ij}^{X}({\sigma}^{-},{X}^{-})\) et où l’inconnue est le multiplicateur plastique \(\Delta {\lambda}^{d}\) ,par une seule itération de Newton, c’est-à-dire finalement de nous avons:
\({\frac{\partial {f}^{d}}{\partial \Delta {\lambda}^{d}}}_{\mid \Delta {\lambda}^{d}=0}\Delta {\lambda}^{d}=-{{f}^{d}}_{\mid \Delta {\lambda}^{d}=0}\) soit encore \(\Delta {\lambda}^{d}=-\frac{{f}_{\mid \Delta {\lambda}^{d}=0}^{d}}{{\frac{\partial {f}^{d}}{\partial \Delta {\lambda}^{d}}}_{\mid \Delta {\lambda}^{d}=0}}\)
avec:
\(\frac{\partial {f}^{d}}{\partial \Delta {\lambda}^{d}}=h({\theta}_{q})\frac{\partial {q}_{\text{II}}}{\partial \Delta {\lambda}^{d}}+{q}_{\text{II}}\frac{\partial h({\theta}_{q})}{\partial \Delta {\lambda}^{d}}+({I}_{1}+{Q}_{\text{init}})\frac{\partial R}{\partial \Delta {\lambda}^{d}}+R\frac{\partial {I}_{1}}{\partial \Delta {\lambda}^{d}}\)
En outre,
on a: \({I}_{1}={I}_{1}^{-}+3{K}^{-}(\text{tr}(\Delta \varepsilon )-\Delta {\lambda}^{d}\text{tr}({G}^{d-}))\) alors: \(\frac{\partial {I}_{1}}{\partial \Delta {\lambda}^{d}}=-3{K}^{-}\text{tr}({G}^{d-})\)
on a: \(R={R}^{-}+\Delta {\lambda}^{d}{G}^{R-}\) alors: \(\frac{\partial R}{\partial \Delta {\lambda}^{d}}={G}^{R-}\)
on a :
\({q}_{ij}={\sigma}_{ij}^{-}+{D}_{ijkl}^{-}({\mathrm{\Delta \varepsilon }}_{kl}-{\mathrm{\Delta \lambda }}^{d}{G}_{kl}^{d-})-\left[{I}_{1}^{-}+3{K}^{-}(\text{tr}(\mathrm{\Delta \varepsilon })-{\mathrm{\Delta \lambda }}^{d}\text{tr}({G}^{d-}))\right]\left[\frac{1}{3}{\delta}_{ij}+{X}_{ij}^{-}+{\mathrm{\Delta \lambda }}^{d}{G}_{ij}^{X-}\right]\)
alors: \({\frac{\partial {q}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{d}}}_{\mid {\mathrm{\Delta \lambda }}^{d}=0}=-{D}_{ijkl}^{-}{G}_{kl}^{d-}+3{K}^{-}\text{tr}({G}^{d-})(\frac{1}{3}{\delta}_{ij}+{X}_{ij}^{-})-{G}_{ij}^{X-}({I}_{1}^{-}+3{K}^{-}\text{tr}(\Delta \varepsilon ))\)
on a: \(\frac{\partial {q}_{\text{II}}}{\partial {\mathrm{\Delta \lambda }}^{d}}=\frac{\partial {q}_{\text{II}}}{\partial {q}_{ij}}\frac{\partial {q}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{d}}=\frac{{q}_{ij}}{{q}_{\text{II}}}\frac{\partial {q}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{d}}\) et \(\frac{\partial h({\theta}_{q})}{\partial {\mathrm{\Delta \lambda }}^{d}}=\frac{\partial h({\theta}_{q})}{\partial {q}_{ij}}\frac{\partial {q}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{d}}\)
En définitive, nous prenons pour le solution d’essai: \({Y}^{0}=({\sigma}_{ij}^{0},{R}^{0},{X}_{ij}^{0},{\mathrm{\Delta \lambda }}^{\mathrm{d0}})\) , avec les valeurs suivantes:
\({\mathrm{\Delta \lambda }}^{\mathrm{d0}}\) : la valeur trouvée d’après la formulation précédente.
\({\sigma}_{ij}^{0}={\sigma}_{ij}^{-}+{D}_{ijkl}^{-}({\mathrm{\Delta \varepsilon }}_{kl}-{\mathrm{\Delta \lambda }}^{\mathrm{d0}}{G}_{kl}^{d-})\)
\({R}^{0}={R}^{-}+{\mathrm{\Delta \lambda }}^{\mathrm{d0}}{G}^{R-}\)
\({X}_{ij}^{0}={X}_{ij}^{-}+{\mathrm{\Delta \lambda }}^{\mathrm{d0}}{G}_{ij}^{X-}\)
Itérations de Newton#
\(\frac{\text{DR}}{\text{DY}}\) est ici donné par:
\(\frac{\text{DR}}{\text{DY}}=\left[\begin{array}{cccc}\frac{\partial {\text{LE}}_{ij}}{\partial {\sigma}_{kl}}& \frac{\partial {\text{LE}}_{ij}}{\partial R}& \frac{\partial {\text{LE}}_{ij}}{\partial {X}_{ij}}& \frac{\partial {\text{LE}}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{d}}\\ \frac{\partial \text{LR}}{\partial {\sigma}_{kl}}& \frac{\partial \text{LR}}{\partial R}& \frac{\partial \text{LR}}{\partial {X}_{ij}}& \frac{\partial \text{LR}}{\partial {\mathrm{\Delta \lambda }}^{d}}\\ \frac{\partial {\text{LX}}_{ij}}{\partial {\sigma}_{kl}}& \frac{\partial {\text{LX}}_{ij}}{\partial R}& \frac{\partial {\text{LX}}_{ij}}{\partial {X}_{ij}}& \frac{\partial {\text{LX}}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{d}}\\ \frac{\partial \text{FD}}{\partial {\sigma}_{kl}}& \frac{\partial \text{FD}}{\partial R}& \frac{\partial \text{FD}}{\partial {X}_{ij}}& \frac{\partial \text{FD}}{\partial {\mathrm{\Delta \lambda }}^{d}}\end{array}\right]\)
avec:
\(\frac{\partial {\text{LE}}_{ij}}{\partial {\sigma}_{kl}}={\delta}_{\text{ik}}{\delta}_{\text{jl}}-{D}_{\text{ijmn}}^{\text{lineaire}}({\mathrm{\Delta \varepsilon }}_{\text{mn}}-{\mathrm{\Delta \lambda }}^{d}{G}_{\text{mn}}^{d})\frac{n}{3{P}_{a}}{(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{n-1}{\delta}_{kl}+{D}_{\text{ijmn}}{\mathrm{\Delta \lambda }}^{d}\frac{\partial {G}_{\text{mn}}^{d}}{\partial {\sigma}_{kl}}\)
\(\frac{\partial {\text{LE}}_{ij}}{\partial R}={D}_{\text{ijmn}}{\mathrm{\Delta \lambda }}^{d}\frac{\partial {G}_{\text{mn}}^{d}}{\partial R}\)
\(\frac{\partial {\text{LE}}_{ij}}{\partial {X}_{kl}}={D}_{\text{ijmn}}{\mathrm{\Delta \lambda }}^{d}\frac{\partial {G}_{\text{mn}}^{d}}{\partial {X}_{kl}}\)
\(\frac{\partial {\text{LE}}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{d}}={D}_{\text{ijmn}}{G}_{\text{mn}}^{d}\)
\(\frac{\partial \text{LR}}{\partial {\sigma}_{kl}}=-{\mathrm{\Delta \lambda }}^{d}\frac{\partial {G}^{R}}{\partial {\sigma}_{kl}}=-{\mathrm{\Delta \lambda }}^{d}\frac{A}{2}{(1-\frac{R}{{R}_{m}})}^{2}{(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1,5}{\delta}_{kl}\)
\(\frac{\partial \text{LR}}{\partial R}=1-{\mathrm{\Delta \lambda }}^{d}\frac{\partial {G}^{R}}{\partial R}=1-{\mathrm{\Delta \lambda }}^{d}\frac{2A}{{R}_{m}}(1-\frac{R}{{R}_{m}})({I}_{1}+{Q}_{\text{init}}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1,5}\)
\(\frac{\partial \text{LR}}{\partial {X}_{kl}}=0\)
\(\frac{\partial \text{LR}}{\partial {\mathrm{\Delta \lambda }}^{d}}=-{G}^{R}\)
\(\frac{\partial {\text{LX}}_{ij}}{\partial {\sigma}_{kl}}=-{\mathrm{\Delta \lambda }}^{d}\frac{\partial {G}_{ij}^{X}}{\partial {\sigma}_{kl}}\)
\(\frac{\partial {\text{LX}}_{ij}}{\partial R}=0\)
\(\frac{\partial {\text{LX}}_{ij}}{\partial {X}_{kl}}={\delta}_{\text{ik}}{\delta}_{\text{jl}}-{\mathrm{\Delta \lambda }}^{d}\frac{\partial {G}_{ij}^{X}}{\partial {X}_{kl}}\)
\(\frac{\partial {\text{LX}}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{d}}=-{G}_{ij}^{X}\)
\(\frac{\partial \text{FD}}{\partial {\sigma}_{kl}}=\frac{\partial {f}^{d}}{\partial {\sigma}_{kl}}={Q}_{kl}-({Q}_{\text{mn}}{X}_{\text{mn}}-R){\delta}_{kl}\)
\(\frac{\partial \text{FD}}{\partial R}={I}_{1}\)
\(\frac{\partial \text{FD}}{\partial {X}_{kl}}=\frac{\partial {f}^{d}}{\partial {X}_{kl}}\)
\(\frac{\partial \text{FD}}{\partial {\mathrm{\Delta \lambda }}^{d}}=0\)
Par ailleurs, le calcul des termes \(\frac{\partial {G}_{\text{mn}}^{d}}{\partial {\sigma}_{kl}}\) , \(\frac{\partial {G}_{\text{mn}}^{d}}{\partial R}\) , \(\frac{\partial {G}_{\text{mn}}^{d}}{\partial {X}_{kl}}\) , \(\frac{\partial {G}_{ij}^{X}}{\partial {\sigma}_{kl}}\) , \(\frac{\partial {G}_{ij}^{X}}{\partial {X}_{kl}}\) et \(\frac{\partial {f}^{d}}{\partial {X}_{kl}}\) est détaillé ci‑après, ainsi que le calcul de termes intermédiaires utiles:
calcul de \(\frac{\partial {f}^{d}}{\partial {X}_{kl}}\) :
\(\frac{\partial {f}^{d}}{\partial {X}_{kl}}={q}_{\text{II}}\frac{\partial h({\theta}_{q})}{\partial {X}_{kl}}+h({\theta}_{q})\frac{\partial {q}_{\text{II}}}{\partial {X}_{kl}}\)
\(={q}_{\text{II}}\frac{\partial h({\theta}_{q})}{\partial {q}_{\text{mn}}}\frac{\partial {q}_{\text{mn}}}{\partial {X}_{kl}}+h({\theta}_{q})\frac{\partial {q}_{\text{II}}}{\partial {q}_{\text{mn}}}\frac{\partial {q}_{\text{mn}}}{\partial {X}_{kl}}\)
\(={q}_{\text{II}}\frac{\partial h({\theta}_{q})}{\partial {q}_{\text{mn}}}\frac{\partial {q}_{\text{mn}}}{\partial {X}_{kl}}+h({\theta}_{q})\frac{{q}_{\text{mn}}}{{q}_{\text{II}}}\frac{\partial {q}_{\text{mn}}}{\partial {X}_{kl}}\)
\(=({q}_{\text{II}}\frac{\partial h({\theta}_{q})}{\partial {q}_{\text{mn}}}+h({\theta}_{q})\frac{{q}_{\text{mn}}}{{q}_{\text{II}}})\frac{\partial {q}_{\text{mn}}}{\partial {X}_{kl}}\)
\(=-{I}_{1}({q}_{\text{II}}\frac{\partial h({\theta}_{q})}{\partial {q}_{\text{mn}}}+h({\theta}_{q})\frac{{q}_{\text{mn}}}{{q}_{\text{II}}}){\delta}_{\text{mk}}{\delta}_{\text{nl}}\)
\(=-{I}_{1}(\frac{\partial {f}^{d}}{\partial {q}_{kl}})\)
On remarquera pour la suite que:
\(\text{dev}(\frac{\partial {f}^{d}}{\partial {X}_{kl}})=-{I}_{1}{Q}_{kl}\)
calcul de \(\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}})}{\partial {\sigma}_{kl}}\) :
\(\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}})}{\partial {\sigma}_{kl}}=\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}})}{\partial {q}_{\text{mn}}}\frac{\partial {q}_{\text{mn}}}{\partial {\sigma}_{kl}}\)
\(=(\frac{\partial ({Q}_{ij}-({Q}_{\text{rs}}{X}_{\text{rs}}-R){\delta}_{ij})}{\partial {q}_{\text{mn}}})\frac{\partial {q}_{\text{mn}}}{\partial {\sigma}_{kl}}\)
\(=(\frac{\partial {Q}_{ij}}{\partial {q}_{\text{mn}}}-(\frac{\partial {Q}_{\text{rs}}}{\partial {q}_{\text{mn}}}{X}_{\text{rs}}){\delta}_{ij})\frac{\partial {q}_{\text{mn}}}{\partial {\sigma}_{kl}}\)
\(=(\frac{\partial {Q}_{ij}}{\partial {q}_{\text{mn}}}-(\frac{\partial {Q}_{\text{rs}}}{\partial {q}_{\text{mn}}}{X}_{\text{rs}}){\delta}_{ij})({\delta}_{\text{mk}}{\delta}_{\text{nl}}-{\delta}_{kl}(\frac{{\delta}_{\text{mn}}}{3}+{X}_{\text{mn}}))\)
calcul de \(\frac{\partial {Q}_{ij}}{\partial {q}_{\text{mn}}}\) :
Au préalable, on défini le tenseur \(t\) et sa partie déviatoire \({t}^{d}\) en posant:
\({t}_{ij}=\frac{\partial \det(q)}{\partial {q}_{ij}}\) et \({t}_{ij}^{d}=\text{dev}(\frac{\partial \det(q)}{\partial {q}_{ij}})\)
On a ainsi:
\(t=\left[\begin{array}{c}{t}_{11}\\ {t}_{22}\\ {t}_{33}\\ {t}_{12}\\ {t}_{13}\\ {t}_{23}\end{array}\right]=\left[\begin{array}{c}{q}_{22}{q}_{33}-{q}_{23}{q}_{23}\\ {q}_{11}{q}_{33}-{q}_{13}{q}_{13}\\ {q}_{11}{q}_{22}-{q}_{12}{q}_{12}\\ {q}_{13}{q}_{23}-{q}_{12}{q}_{33}\\ {q}_{12}{q}_{23}-{q}_{13}{q}_{22}\\ {q}_{12}{q}_{13}-{q}_{23}{q}_{11}\end{array}\right]\)
\(\begin{array}{}\frac{\partial {Q}_{ij}}{\partial {q}_{\text{mn}}}=\frac{-5}{h{({\theta}_{q})}^{6}}\left[(1+\frac{\gamma}{2}\cos(3{\theta}_{q}))\frac{{q}_{ij}}{{q}_{\text{II}}}+\frac{\gamma \sqrt{54}}{6{q}_{\text{II}}^{2}}\text{dev}({t}_{ij})\right]\frac{\partial (h({\theta}_{q}))}{\partial {q}_{\text{mn}}}\\ +\frac{1}{h{({\theta}_{q})}^{5}}(1+\frac{\gamma}{2}\cos(3{\theta}_{q}))\frac{\partial (\frac{{q}_{ij}}{{q}_{\text{II}}})}{\partial {q}_{\text{mn}}}+\frac{1}{h{({\theta}_{q})}^{5}}\frac{\gamma}{2}\frac{{q}_{ij}}{{q}_{\text{II}}}\frac{\partial \cos(3{\theta}_{q})}{\partial {q}_{\text{mn}}}+\frac{1}{h{({\theta}_{q})}^{5}}\frac{\sqrt{54}\gamma }{6}\frac{\partial (\frac{{t}_{ij}^{d}}{{q}_{\text{II}}^{2}})}{\partial {q}_{\text{mn}}}\\ =\frac{-5}{h{({\theta}_{q})}^{6}}\left[(1+\frac{\gamma}{2}\cos(3{\theta}_{q}))\frac{{q}_{ij}}{{q}_{\text{II}}}+\frac{\gamma \sqrt{54}}{6{q}_{\text{II}}^{2}}\text{dev}({t}_{ij})\right]\frac{\partial (h({\theta}_{q}))}{\partial {q}_{\text{mn}}}+\frac{1}{h{({\theta}_{q})}^{5}}(1+\frac{\gamma}{2}\cos(3{\theta}_{q}))(\frac{{\delta}_{\text{im}}{\delta}_{\text{jn}}}{{q}_{\text{II}}}-\frac{{q}_{ij}{q}_{\text{mn}}}{{q}_{\text{II}}^{3}})\\ +\frac{1}{h{({\theta}_{q})}^{5}}\frac{\gamma}{2}\frac{{q}_{ij}\sqrt{54}}{{q}_{\text{II}}^{4}}({t}_{\text{mn}}-3\frac{\det(q)}{{q}_{\text{II}}^{2}}{q}_{\text{mn}})+\frac{1}{h{({\theta}_{q})}^{5}}\frac{\gamma}{6}\frac{\sqrt{54}}{{q}_{\text{II}}^{2}}(\frac{\partial {t}_{ij}^{d}}{\partial {q}_{\text{mn}}}-{\mathrm{2t}}_{ij}^{d}\frac{{q}_{\text{mn}}}{{q}_{\text{II}}^{2}})\end{array}\)
L’expression de \(\frac{\partial {t}_{ij}^{d}}{\partial {q}_{\text{mn}}}\) s’explicite comme suit:
\(\frac{\partial {t}^{d}}{\partial {q}_{11}}=\left[\begin{array}{c}-\frac{1}{3}({q}_{22}+{q}_{33})\\ \frac{1}{3}(-{q}_{22}+2{q}_{33})\\ \frac{1}{3}(2{q}_{22}-{q}_{33})\\ 0\\ 0\\ -{q}_{23}\end{array}\right]\) , \(\frac{\partial {t}^{d}}{\partial {q}_{22}}=\left[\begin{array}{c}\frac{1}{3}(-{q}_{11}+2{q}_{33})\\ -\frac{1}{3}({q}_{11}+{q}_{33})\\ \frac{1}{3}(2{q}_{11}-{q}_{33})\\ 0\\ -{q}_{13}\\ 0\end{array}\right]\) , \(\frac{\partial {t}^{d}}{\partial {q}_{33}}=\left[\begin{array}{c}\frac{1}{3}(-{q}_{11}+2{q}_{22})\\ \frac{1}{3}(2{q}_{11}-{q}_{22})\\ -\frac{1}{3}({q}_{11}+{q}_{22})\\ -{q}_{12}\\ 0\\ 0\end{array}\right]\) ,
\(\frac{\partial {t}^{d}}{\partial {q}_{12}}=\left[\begin{array}{c}\frac{2}{3}{q}_{12}\\ \frac{2}{3}{q}_{12}\\ -\frac{4}{3}{q}_{12}\\ -{q}_{33}\\ {q}_{23}\\ {q}_{13}\end{array}\right]\) , \(\frac{\partial {t}^{d}}{\partial {q}_{13}}=\left[\begin{array}{c}\frac{2}{3}{q}_{13}\\ -\frac{4}{3}{q}_{13}\\ \frac{2}{3}{q}_{13}\\ {q}_{23}\\ -{q}_{22}\\ {q}_{12}\end{array}\right]\) , \(\frac{\partial {t}^{d}}{\partial {q}_{23}}=\left[\begin{array}{c}-\frac{4}{3}{q}_{23}\\ \frac{2}{3}{q}_{23}\\ \frac{2}{3}{q}_{23}\\ {q}_{13}\\ {q}_{12}\\ -{q}_{11}\end{array}\right]\)
calcul de \(\frac{\partial {G}_{\text{mn}}^{d}}{\partial {\sigma}_{kl}}\) :
On a:
\(\frac{\partial {G}_{\text{mn}}^{d}}{\partial {\sigma}_{kl}}=\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{mn}}})}{\partial {\sigma}_{kl}}-(\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}{n}_{\text{rs}})\frac{\partial {n}_{\text{mn}}}{\partial {\sigma}_{kl}}-(\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}})}{\partial {\sigma}_{kl}}{n}_{\text{rs}}+\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}\frac{\partial {n}_{\text{rs}}}{\partial {\sigma}_{kl}}){n}_{\text{mn}}\)
On défini le tenseur \(\tilde{n}\) par \({\tilde{n}}_{ij}={\mathrm{\beta }}^{'}\frac{{s}_{ij}}{{s}_{\text{II}}}+{\delta}_{ij}\)
c’est à dire que \(n\) est alors donné par \({n}_{ij}=\frac{{\tilde{n}}_{ij}}{{\tilde{n}}_{\text{II}}}\) avec \({\tilde{n}}_{\text{II}}=\sqrt{{\mathrm{\beta }}^{'2}+3}\)
Dans la pratique, pour le calcul de \({\mathrm{\beta }}^{'}\) , on utilise \({\mathrm{\Delta \varepsilon }}_{ij}\) à la place de \({\mathrm{\Delta \varepsilon }}_{ij}^{\text{dp}}\) , c’est-à-dire que l’on a:
\({\mathrm{\beta }}^{'}=\mathrm{\beta }(\frac{{s}_{\text{II}}}{{s}_{\text{II}}^{c}}-1)\text{signe}({s}_{ij}{\mathrm{\Delta \varepsilon }}_{ij})\)
On a alors pour \(\frac{\partial {G}_{\text{mn}}^{d}}{\partial {\sigma}_{kl}}\) :
\(\frac{\partial {G}_{\text{mn}}^{d}}{\partial {\sigma}_{kl}}=\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{mn}}})}{\partial {\sigma}_{kl}}-(\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}})}{\partial {\sigma}_{kl}}{n}_{\text{rs}}){n}_{\text{mn}}-(\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}\frac{\partial {\tilde{n}}_{\text{rs}}}{\partial {\sigma}_{kl}})\frac{{\tilde{n}}_{\text{mn}}}{{\tilde{n}}_{\text{II}}^{2}}-(\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}{\tilde{n}}_{\text{rs}})\frac{\partial {\tilde{n}}_{\text{mn}}}{\partial {\sigma}_{kl}}\frac{1}{{\tilde{n}}_{\text{II}}^{2}}-(\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}{\tilde{n}}_{\text{rs}}){\tilde{n}}_{\text{mn}}\frac{\partial (\frac{1}{{\tilde{n}}_{\text{II}}^{2}})}{\partial {\sigma}_{kl}}\)
avec:
\(\frac{\partial (\frac{1}{{\tilde{{n}^{2}}}_{\text{II}}})}{\partial {\sigma}_{kl}}=\frac{\partial (\frac{1}{({\mathrm{\beta }}^{'2}+3)})}{\partial {\sigma}_{kl}}=-\frac{1}{{({\mathrm{\beta }}^{'2}+3)}^{2}}\frac{\partial ({\mathrm{\beta }}^{'2})}{\partial {\sigma}_{kl}}=-\frac{2{\mathrm{\beta }}^{2}(\frac{{s}_{\text{II}}}{{s}_{\text{II}}^{c}}-1)}{{({\mathrm{\beta }}^{'2}+3)}^{2}}\frac{\partial (\frac{{s}_{\text{II}}}{{s}_{\text{II}}^{c}})}{\partial {\sigma}_{kl}}\)
calcul de \(\frac{\partial (\frac{{s}_{\text{II}}}{{s}_{\text{II}}^{c}})}{\partial {\sigma}_{kl}}\) :
\(\frac{\partial (\frac{{s}_{\text{II}}}{{s}_{\text{II}}^{c}})}{\partial {\sigma}_{kl}}=\frac{1}{{s}_{\text{II}}^{c}}\frac{\partial ({s}_{\text{II}})}{\partial {\sigma}_{kl}}-\frac{{s}_{\text{II}}}{{s}_{\text{II}}^{{c}^{2}}}\frac{\partial ({s}_{\text{II}}^{c})}{\partial {\sigma}_{kl}}\)
\(=\frac{1}{{s}_{\text{II}}^{c}}\frac{\partial ({s}_{\text{II}})}{\partial {s}_{\text{mn}}}\frac{\partial {s}_{\text{mn}}}{\partial {\sigma}_{kl}}-\frac{{s}_{\text{II}}}{{s}_{\text{II}}^{{c}^{2}}}\frac{\partial (-\frac{{R}_{c}({I}_{1}+{Q}_{\text{init}})}{h({\theta}_{s})})}{\partial {\sigma}_{kl}}\)
\(=\frac{1}{{s}_{\text{II}}^{c}}\frac{{s}_{\text{mn}}}{{s}_{\text{II}}}({\delta}_{\text{mk}}{\delta}_{\text{nl}}-\frac{1}{3}{\delta}_{\text{mn}}{\delta}_{kl})-\frac{{s}_{\text{II}}}{{s}_{\text{II}}^{{c}^{2}}}(-\frac{{R}_{c}}{h({\theta}_{s})}\frac{\partial {I}_{1}}{\partial {\sigma}_{kl}}+\frac{{R}_{c}({I}_{1}+{Q}_{\text{init}})}{h{({\theta}_{s})}^{2}}\frac{\partial h({\theta}_{s})}{\partial {\sigma}_{kl}})\)
\(=\frac{1}{{s}_{\text{II}}^{c}}\frac{{s}_{\text{mn}}}{{s}_{\text{II}}}({\delta}_{\text{mk}}{\delta}_{\text{nl}}-\frac{1}{3}{\delta}_{\text{mn}}{\delta}_{kl})-\frac{{s}_{\text{II}}}{{s}_{\text{II}}^{{c}^{2}}}(-\frac{{R}_{c}}{h({\theta}_{s})}{\delta}_{kl}+\frac{{R}_{c}({I}_{1}+{Q}_{\text{init}})}{h{({\theta}_{s})}^{2}}\frac{\partial h({\theta}_{s})}{\partial {s}_{\text{rs}}}\frac{\partial {s}_{\text{rs}}}{\partial {\sigma}_{kl}})\)
calcul de \(\frac{\partial {\tilde{n}}_{\text{mn}}}{\partial {\sigma}_{kl}}\) :
\(\frac{\partial {\tilde{n}}_{\text{mn}}}{\partial {\sigma}_{kl}}=\beta (\frac{1}{{s}_{\text{II}}^{c}}-\frac{1}{{s}_{\text{II}}})\text{signe}({s}_{ij}\Delta {\varepsilon}_{ij})\frac{\partial {s}_{\text{mn}}}{\partial {\sigma}_{kl}}+\beta \text{signe}({s}_{ij}\Delta {\varepsilon}_{ij}){s}_{\text{mn}}(\frac{\partial (\frac{1}{{s}_{\text{II}}^{c}})}{\partial {\sigma}_{kl}}-\frac{\partial (\frac{1}{{s}_{\text{II}}})}{\partial {\sigma}_{kl}})\)
\(=\beta (\frac{1}{{s}_{\text{II}}^{c}}-\frac{1}{{s}_{\text{II}}})\text{signe}({s}_{ij}\Delta {\varepsilon}_{ij})({\delta}_{\text{mk}}{\delta}_{\text{nl}}-\frac{1}{3}{\delta}_{\text{mn}}{\delta}_{kl})+\beta \text{signe}({s}_{ij}\Delta {\varepsilon}_{ij}){s}_{\text{mn}}(\frac{1}{{s}_{\text{II}}^{2}}\frac{\partial ({s}_{\text{II}})}{\partial {\sigma}_{kl}}-\frac{1}{{s}_{\text{II}}^{{c}^{2}}}\frac{\partial {s}_{\text{II}}^{c}}{\partial {\sigma}_{kl}})\)
calcul de \(\frac{\partial {G}_{\text{mn}}^{d}}{\partial R}\) :
\(\frac{\partial {G}_{\text{mn}}^{d}}{\partial R}=\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{mn}}})}{\partial R}-(\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}{n}_{\text{rs}})\frac{\partial {n}_{\text{mn}}}{\partial R}-(\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}})}{\partial R}{n}_{\text{rs}}+\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}\frac{\partial {n}_{\text{rs}}}{\partial R}){n}_{\text{mn}}\)
\(=\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{mn}}})}{\partial R}-(\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}})}{\partial R}{n}_{\text{rs}}){n}_{\text{mn}}\)
\(={\delta}_{\text{mn}}-({\delta}_{\text{rs}}{n}_{\text{rs}}){n}_{\text{mn}}\)
\(=\frac{{\mathrm{\beta }}^{'2}{\delta}_{\text{mn}}-3{\mathrm{\beta }}^{'}\frac{{s}_{\text{mn}}}{{s}_{\text{II}}}}{{\mathrm{\beta }}^{'2}+3}\)
calcul de \(\frac{\partial {G}_{\text{mn}}^{d}}{\partial {X}_{kl}}\) :
\(\frac{\partial {G}_{\text{mn}}^{d}}{\partial {X}_{kl}}=\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{mn}}})}{\partial {X}_{kl}}-(\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}{n}_{\text{rs}})\frac{\partial {n}_{\text{mn}}}{\partial {X}_{kl}}-(\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}})}{\partial {X}_{kl}}{n}_{\text{rs}}+\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}\frac{\partial {n}_{\text{rs}}}{\partial {X}_{kl}}){n}_{\text{mn}}\)
\(=\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{mn}}})}{\partial {X}_{kl}}-(\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}})}{\partial {X}_{kl}}{n}_{\text{rs}}){n}_{\text{mn}}\)
calcul de \(\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{mn}}})}{\partial {X}_{kl}}\) :
\(\frac{\partial (\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{mn}}})}{\partial {X}_{kl}}=\frac{\partial {Q}_{\text{mn}}}{\partial {X}_{kl}}-(\frac{\partial {Q}_{\text{rs}}}{\partial {X}_{kl}}{X}_{\text{rs}}+{Q}_{\text{rs}}\frac{\partial {X}_{\text{rs}}}{\partial {X}_{kl}}){\delta}_{\text{mn}}\)
\(=\frac{\partial {Q}_{\text{mn}}}{\partial {q}_{ij}}\frac{\partial {q}_{ij}}{\partial {X}_{kl}}-((\frac{\partial {Q}_{\text{rs}}}{\partial {q}_{ij}}\frac{\partial {q}_{ij}}{\partial {X}_{kl}}){X}_{\text{rs}}+{Q}_{\text{rs}}{\delta}_{\text{kr}}{\delta}_{\text{ls}}){\delta}_{\text{mn}}\)
\(=-{I}_{1}\frac{\partial {Q}_{\text{mn}}}{\partial {q}_{ij}}{\delta}_{\text{ik}}{\delta}_{\text{jl}}-((-{I}_{1}\frac{\partial {Q}_{\text{rs}}}{\partial {q}_{ij}}{\delta}_{\text{ik}}{\delta}_{\text{jl}}){X}_{\text{rs}}+{Q}_{\text{rs}}{\delta}_{\text{kr}}{\delta}_{\text{ls}}){\delta}_{\text{mn}}\)
calcul de \(\frac{\partial {G}_{ij}^{X}}{\partial {\sigma}_{kl}}\) :
\(\frac{\partial {G}_{ij}^{X}}{\partial {\sigma}_{kl}}=-\frac{1}{2b}({Q}_{ij}+\varphi {X}_{ij}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1,5}\frac{\partial {I}_{1}}{\partial {\sigma}_{kl}}+\frac{1}{b}(\frac{\partial {Q}_{ij}}{\partial {\sigma}_{kl}}+\frac{\partial \varphi }{\partial {\sigma}_{kl}}{X}_{ij})({I}_{1}+{Q}_{\text{init}}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1,5}\)
\(\begin{array}{}=-\frac{1}{2b}({Q}_{ij}+\varphi {X}_{ij}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1,5}{\delta}_{kl}+\frac{1}{b}\frac{\partial {Q}_{ij}}{\partial {q}_{\text{mn}}}\frac{\partial {q}_{\text{mn}}}{\partial {\sigma}_{kl}}({I}_{1}+{Q}_{\text{init}}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1,5}\\ +\frac{1}{b}(h({\theta}_{s}){Q}_{\text{II}}\frac{\partial {\varphi}_{o}}{\partial {\sigma}_{kl}}+{\varphi}_{o}{Q}_{\text{II}}\frac{\partial h({\theta}_{s})}{\partial {\sigma}_{kl}}+{\varphi}_{o}h({\theta}_{s})\frac{\partial {Q}_{\text{II}}}{\partial {\sigma}_{kl}}){X}_{ij}({I}_{1}+{Q}_{\text{init}}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1,5}\end{array}\)
calcul de \(\frac{\partial h({\theta}_{s})}{\partial {\sigma}_{kl}}\) :
\(\frac{\partial h({\theta}_{s})}{\partial {\sigma}_{kl}}=\frac{\partial h({\theta}_{s})}{\partial {s}_{\text{mn}}}\frac{\partial {s}_{\text{mn}}}{\partial {\sigma}_{kl}}\)
\(=(\frac{\gamma \sqrt{54}}{6h{({\theta}_{s})}^{5}{q}_{\text{II}}^{3}}{t}_{\text{mn}}-\frac{\gamma \cos({\mathrm{3\theta }}_{q})}{\mathrm{2h}{({\theta}_{s})}^{5}{q}_{\text{II}}^{2}}{s}_{\text{mn}})({\delta}_{\text{mk}}{\delta}_{\text{nl}}-\frac{1}{3}{\delta}_{\text{mn}}{\delta}_{kl})\)
calcul de \(\frac{\partial {Q}_{\text{II}}}{\partial {\sigma}_{kl}}\) :
\(\frac{\partial {Q}_{\text{II}}}{\partial {\sigma}_{kl}}=(\frac{\partial {Q}_{\text{II}}}{\partial {Q}_{\text{rs}}}\frac{\partial {Q}_{\text{rs}}}{\partial {q}_{\text{mn}}})\frac{\partial {q}_{\text{mn}}}{\partial {\sigma}_{kl}}\)
\(=(\frac{{Q}_{\text{rs}}}{{Q}_{\text{II}}}\frac{\partial {Q}_{\text{rs}}}{\partial {q}_{\text{mn}}})({\delta}_{\text{mk}}{\delta}_{\text{nl}}-{\delta}_{\text{mn}}(\frac{1}{3}{\delta}_{kl}+{X}_{kl}))\)
calcul de \(\frac{\partial {\varphi}_{o}}{\partial {\sigma}_{kl}}\) :
\(\begin{array}{}\frac{\partial {\varphi}_{o}}{\partial {\sigma}_{kl}}=\frac{1}{{R}_{r}-\frac{h({\theta}_{s})}{h({\theta}_{q})}{R}_{m}\cos({\theta}_{s}-{\theta}_{q})}\frac{\partial \cos\alpha }{\partial {\sigma}_{kl}}\\ -\cos\alpha \frac{\left[\frac{\partial {R}_{r}}{\partial {\sigma}_{kl}}-\frac{1}{h({\theta}_{q})}{R}_{m}\cos({\theta}_{s}-{\theta}_{q})\frac{\partial h({\theta}_{s})}{\partial {\sigma}_{kl}}+\frac{h({\theta}_{s})}{h{({\theta}_{q})}^{2}}{R}_{m}\cos({\theta}_{s}-{\theta}_{q})\frac{\partial h({\theta}_{s})}{\partial {\sigma}_{kl}}-\frac{h({\theta}_{s})}{h({\theta}_{q})}{R}_{m}\frac{\partial \cos({\theta}_{s}-{\theta}_{q})}{\partial {\sigma}_{kl}}\right]}{{\left[{R}_{r}-\frac{h({\theta}_{s})}{h({\theta}_{q})}{R}_{m}\cos({\theta}_{s}-{\theta}_{q})\right]}^{2}}\end{array}\)
avec:
\(\begin{array}{}\frac{\partial \cos\alpha }{\partial {\sigma}_{kl}}=\frac{1}{2{s}_{\text{II}}{I}_{1}{X}_{\text{II}}}(2{q}_{\text{II}}\frac{\partial {q}_{\text{II}}}{\partial {\sigma}_{kl}}-2{I}_{1}{X}_{\text{II}}^{2}\frac{\partial {I}_{1}}{\partial {\sigma}_{kl}}-2{s}_{\text{II}}\frac{\partial {s}_{\text{II}}}{\partial {\sigma}_{kl}})\\ -\frac{{q}_{\text{II}}^{2}-{({I}_{1}{X}_{\text{II}})}^{2}-{s}_{\text{II}}^{2}}{{s}_{\text{II}}{I}_{1}{X}_{\text{II}}}({s}_{\text{II}}{X}_{\text{II}}\frac{\partial {I}_{1}}{\partial {\sigma}_{kl}}+{I}_{1}{X}_{\text{II}}\frac{\partial {s}_{\text{II}}}{\partial {\sigma}_{kl}})\end{array}\)
\(=\frac{1}{{s}_{\text{II}}{I}_{1}{X}_{\text{II}}}\left[({q}_{kl}-{I}_{1}{X}_{\text{II}}^{2}{\delta}_{kl}-{s}_{kl})-({q}_{\text{II}}^{2}-{({I}_{1}{X}_{\text{II}})}^{2}-{s}_{\text{II}}^{2})({s}_{\text{II}}{X}_{\text{II}}{\delta}_{kl}+{I}_{1}{X}_{\text{II}}\frac{{s}_{kl}}{{s}_{\text{II}}})\right]\)
\(\frac{\partial {R}_{r}}{\partial {\sigma}_{kl}}=-\frac{\mu}{{I}_{1}+{Q}_{\text{init}}}{\delta}_{kl}\)
\(\frac{\partial \cos({\theta}_{s}-{\theta}_{q})}{\partial {\sigma}_{kl}}=-\sin({\theta}_{s}-{\theta}_{q})(\frac{\partial {\theta}_{s}}{\partial {\sigma}_{kl}}-\frac{\partial {\theta}_{q}}{\partial {\sigma}_{kl}})\)
calcul de \(\frac{\partial {G}_{ij}^{X}}{\partial {X}_{kl}}\) :
\(\frac{\partial {G}_{ij}^{X}}{\partial {X}_{kl}}=\frac{1}{b}(\frac{\partial {Q}_{ij}}{\partial {X}_{kl}}+\varphi \frac{\partial {X}_{ij}}{\partial {X}_{kl}})({I}_{1}+{Q}_{\text{init}}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1,5}\)
\(=\frac{1}{b}(\frac{\partial {Q}_{ij}}{\partial {q}_{\text{mn}}}\frac{\partial {q}_{\text{mn}}}{\partial {X}_{kl}}+\varphi {\delta}_{\text{ik}}{\delta}_{\text{jl}})({I}_{1}+{Q}_{\text{init}}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1,5}\)
\(=\frac{1}{b}(-{I}_{1}\frac{\partial {Q}_{ij}}{\partial {q}_{\text{mn}}}{\delta}_{\text{mk}}{\delta}_{\text{nl}}+\varphi {\delta}_{\text{ik}}{\delta}_{\text{jl}})({I}_{1}+{Q}_{\text{init}}){(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1,5}\)
Test de convergence#
Le critère de convergence reste \(\frac{\parallel {\text{DY}}^{\text{p+1}}\parallel }{\parallel {Y}^{\text{p+1}}-{Y}^{0}\parallel }\) RESI_INTE_RELA.
Intégration des mécanismes élastique non linéaire, plastique isotrope et plastique déviatoire#
Dans ce cas, le nouvel état de contrainte \({\sigma}^{+}\) , vérifie:
\({\sigma}_{ij}^{+}={\sigma}_{ij}^{-}+{D}_{ijkl}({\sigma}^{+})({\mathrm{\Delta \varepsilon }}_{kl}-{\mathrm{\Delta \varepsilon }}_{kl}^{\text{ip}}-{\mathrm{\Delta \varepsilon }}_{kl}^{\text{dp}})\)
Compte tenu de ce qui précède, on en déduit que le système non linéaire à résoudre est composé de:
\({\text{LE}}_{ij}\) : la loi état élastique: \({\sigma}_{ij}^{+}-{\sigma}_{ij}^{-}-{D}_{ijkl}({\sigma}^{+})({\mathrm{\Delta \varepsilon }}_{kl}+\frac{1}{3}{\mathrm{\Delta \lambda }}^{i}{\delta}_{kl}-{\mathrm{\Delta \lambda }}^{d}{G}_{kl}^{d}({\sigma}^{+},{R}^{+},{X}^{+}))=0\)
\(\text{LQ}\) : la loi d’écrouissage de la variable interne \({Q}_{\text{iso}}\) : \({Q}_{\text{iso}}^{+}-{Q}_{\text{iso}}^{-}-{\mathrm{D\lambda }}^{i}{G}^{{Q}_{\text{iso}}}({Q}_{\text{iso}}^{+})=0\)
\(\text{LR}\) : la loi d’écrouissage de la variable \(R\) : \({R}^{+}-{R}^{-}-{\mathrm{\Delta \lambda }}^{d}{G}^{R}({\sigma}^{+},{R}^{+})=0\)
\({\text{LX}}_{ij}\) : la loi d’écrouissage de la variable \({X}_{ij}\) : \({X}_{ij}^{+}-{X}_{ij}^{-}-{\mathrm{\Delta \lambda }}^{d}{G}_{ij}^{X}({\sigma}^{+},{X}^{+})=0\)
\(\text{FI}\) : l’équation de la surface de charge isotrope: \(-\frac{{I}_{1}^{+}+{Q}_{\text{init}}}{3}+{Q}_{\text{iso}}^{+}=0\)
\(\text{FD}\) : l’équation de la surface de charge déviatoire: \({q}_{\text{II}}^{+}h({\theta}_{q}^{+})+{R}^{+}({I}_{1}^{+}+{Q}_{\text{init}})=0\)
Comme aux paragraphes précédents on résout par la méthode de Newton le système \(R(Y)=0\) , où l’inconnue \(Y\) est donnée par \(Y=({\sigma}_{ij}^{+},{Q}_{\text{iso}}^{+},{R}^{+},{X}_{ij}^{+},{\mathrm{\Delta \lambda }}^{i},{\mathrm{\Delta \lambda }}^{d})\) et où \(R=({\text{LE}}_{ij},\text{LQ},\text{LR},{\text{LX}}_{ij},\text{FI},\text{FD})\) .
Initialisation et solution d’essai#
À partir de l’état à l’instant \(t\) \(({\sigma}_{ij}^{-},{Q}_{\text{iso}}^{-},{R}^{-},{X}_{ij}^{-})\) , nous cherchons une solution d’essai qui nous rapproche de la solution finale. Pour cela nous résolvons le système d’équations suivant:
\(\lbrace \begin{array}{c}{f}^{i}({s}_{ij}^{-}+{D}_{ijkl}^{+}({\mathrm{De}}_{kl}+\frac{1}{3}D{\lambda}^{i}{d}_{kl}-D{\lambda}^{d}{G}_{kl}^{d}),{Q}_{\text{iso}}^{-}+D{\lambda}^{i}{G}^{{Q}_{\text{iso}}-})=0\\ {f}^{d}({s}_{ij}^{-}+{D}_{ijkl}^{+}({\mathrm{De}}_{kl}+\frac{1}{3}D{\lambda}^{i}{d}_{kl}-D{\lambda}^{d}{G}_{kl}^{d}),{R}^{-}+D{\lambda}^{d}{G}^{R-},{X}_{ij}^{-}+D{\lambda}^{d}{G}_{ij}^{X-})=0\end{array}\)
avec:
\({D}_{ijkl}^{-}={D}_{ijkl}({\sigma}^{-})\) , \({G}_{kl}^{d-}={G}_{kl}^{d}({\sigma}^{-},{R}^{-},{X}^{-})\) , \({G}^{{Q}_{\text{iso}}-}={G}^{{Q}_{\text{iso}}}({Q}_{\text{iso}}^{-})\) \({G}^{R-}={G}^{R}({\sigma}^{-},{R}^{-})\) , \({G}_{ij}^{X-}={G}_{ij}^{X}({\sigma}^{-},{X}^{-})\) et où les inconnues sont les multiplicateurs plastiques \(\Delta {\lambda}^{i}\) et \(\Delta {\lambda}^{d}\) , par une seule itération de Newton, c’est-à-dire finalement que nous avons:
\(\begin{array}{c}{\frac{\partial {f}^{i}}{\partial \Delta {\lambda}^{i}}}_{\mid \Delta {\lambda}^{i}=0,\Delta {\lambda}^{d}=0}\Delta {\lambda}^{i}+{\frac{\partial {f}^{i}}{\partial \Delta {\lambda}^{d}}}_{\mid \Delta {\lambda}^{i}=0,\Delta {\lambda}^{d}=0}\Delta {\lambda}^{d}=-{f}^{{i}_{\mid \Delta {\lambda}^{i}=0,\Delta {\lambda}^{d}=0}}\\ {\frac{\partial {f}^{d}}{\partial \Delta {\lambda}^{i}}}_{\mid \Delta {\lambda}^{i}=0,\Delta {\lambda}^{d}=0}\Delta {\lambda}^{i}+{\frac{\partial {f}^{d}}{\partial \Delta {\lambda}^{d}}}_{\mid \Delta {\lambda}^{i}=0,\Delta {\lambda}^{d}=0}\Delta {\lambda}^{d}=-{f}^{{d}_{\mid \Delta {\lambda}^{i}=0,\Delta {\lambda}^{d}=0}}\end{array}\)
soit encore:
\({\mathrm{\Delta \lambda }}^{i}=\frac{\frac{\partial {f}^{i}}{\partial {\mathrm{\Delta \lambda }}^{d}}{f}^{d}-\frac{\partial {f}^{d}}{\partial {\mathrm{\Delta \lambda }}^{d}}{f}^{i}}{\frac{\partial {f}^{i}}{\partial {\mathrm{\Delta \lambda }}^{i}}\frac{\partial {f}^{d}}{\partial {\mathrm{\Delta \lambda }}^{d}}-\frac{\partial {f}^{i}}{\partial {\mathrm{\Delta \lambda }}^{d}}\frac{\partial {f}^{d}}{\partial {\mathrm{\Delta \lambda }}^{i}}}\) et \({\mathrm{\Delta \lambda }}^{d}=\frac{\frac{\partial {f}^{d}}{\partial {\mathrm{\Delta \lambda }}^{i}}{f}^{i}-\frac{\partial {f}^{i}}{\partial {\mathrm{\Delta \lambda }}^{i}}{f}^{d}}{\frac{\partial {f}^{i}}{\partial {\mathrm{\Delta \lambda }}^{i}}\frac{\partial {f}^{d}}{\partial {\mathrm{\Delta \lambda }}^{d}}-\frac{\partial {f}^{i}}{\partial {\mathrm{\Delta \lambda }}^{d}}\frac{\partial {f}^{d}}{\partial {\mathrm{\Delta \lambda }}^{i}}}\)
avec:
\(\frac{\partial {f}^{i}}{\partial {\mathrm{\Delta \lambda }}^{i}}=-({K}^{-}+{K}^{p-})\)
\(\frac{\partial {f}^{i}}{\partial {\mathrm{\Delta \lambda }}^{d}}={K}^{-}\text{tr}({G}^{d-})\)
\(\frac{\partial {f}^{d}}{\partial {\mathrm{\Delta \lambda }}^{i}}=h({\theta}_{q})\frac{\partial {q}_{\text{II}}}{\partial {\mathrm{\Delta \lambda }}^{i}}+{q}_{\text{II}}\frac{\partial h({\theta}_{q})}{\partial {\mathrm{\Delta \lambda }}^{i}}+({I}_{1}+{Q}_{\text{init}})\frac{\partial R}{\partial {\mathrm{\Delta \lambda }}^{i}}+R\frac{\partial {I}_{1}}{\partial {\mathrm{\Delta \lambda }}^{i}}\)
\(\frac{\partial {f}^{d}}{\partial {\mathrm{\Delta \lambda }}^{d}}=h({\theta}_{q})\frac{\partial {q}_{\text{II}}}{\partial {\mathrm{\Delta \lambda }}^{d}}+{q}_{\text{II}}\frac{\partial h({\theta}_{q})}{\partial {\mathrm{\Delta \lambda }}^{d}}+({I}_{1}+{Q}_{\text{init}})\frac{\partial R}{\partial {\mathrm{\Delta \lambda }}^{d}}+R\frac{\partial {I}_{1}}{\partial {\mathrm{\Delta \lambda }}^{d}}\)
On sait que \(\frac{\partial {f}^{d}}{\partial {\mathrm{\Delta \lambda }}^{d}}\) se calcule de la même façon que précédemment lorsque seul le mécanisme plastique déviatoire était activé. Par ailleurs, on a, pour le calcul de \(\frac{\partial {f}^{d}}{\partial {\mathrm{\Delta \lambda }}^{i}}\) et lorsque \({\mathrm{\Delta \lambda }}^{i}=0\) et \({\mathrm{\Delta \lambda }}^{d}=0\) , les relations suivantes:
\(\frac{\partial {q}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{i}}=\frac{1}{3}{D}_{ijkl}^{-}{\delta}_{kl}-3{K}^{e-}(\frac{1}{3}{\delta}_{ij}+{X}_{ij}^{-})\)
\(\frac{\partial {q}_{\text{II}}}{\partial {\mathrm{\Delta \lambda }}^{i}}=\frac{\partial {q}_{\text{II}}}{\partial {q}_{ij}}\frac{\partial {q}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{i}}=\frac{{q}_{ij}}{{q}_{\text{II}}}(\frac{1}{3}{D}_{ijkl}^{-}{\delta}_{kl}-3{K}^{e-}(\frac{1}{3}{\delta}_{ij}+{X}_{ij}^{-}))\)
\(\frac{\partial h({\theta}_{q})}{\partial {\mathrm{\Delta \lambda }}^{i}}=\frac{\partial h({\theta}_{q})}{\partial {q}_{ij}}\frac{\partial {q}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{i}}\)
\(\frac{\partial R}{\partial {\mathrm{\Delta \lambda }}^{i}}=0\)
\(\frac{\partial {I}_{1}}{\partial {\mathrm{\Delta \lambda }}^{i}}=3{K}^{-}\)
En définitive, nous prenons pour la solution d’essai: \({Y}^{0}=({\sigma}_{ij}^{0},{Q}_{\text{iso}}^{0},{R}^{0},{X}_{ij}^{0},{\mathrm{\Delta \lambda }}^{\mathrm{i0}},{\mathrm{\Delta \lambda }}^{\mathrm{d0}})\) , avec les valeurs suivantes:
\({\mathrm{\Delta \lambda }}^{\mathrm{i0}}\) : la valeur trouvée d’après la formulation précédente.
\({\mathrm{\Delta \lambda }}^{\mathrm{d0}}\) : la valeur trouvée d’après la formulation précédente.
\({\sigma}_{ij}^{0}={\sigma}_{ij}^{-}+{D}_{ijkl}^{-}({\mathrm{\Delta \varepsilon }}_{kl}+\frac{1}{3}{\mathrm{\Delta \lambda }}^{\mathrm{i0}}{\delta}_{kl}-{\mathrm{\Delta \lambda }}^{\mathrm{d0}}{G}_{kl}^{d-})\)
\({Q}_{\text{iso}}^{0}={Q}_{\text{iso}}^{-}+{\mathrm{\Delta \lambda }}^{\mathrm{i0}}{G}^{{Q}_{\text{iso}}-}\)
\({R}^{0}={R}^{-}+{\mathrm{\Delta \lambda }}^{\mathrm{d0}}{G}^{R-}\)
\({X}_{ij}^{0}={X}_{ij}^{-}+{\mathrm{\Delta \lambda }}^{\mathrm{d0}}{G}_{ij}^{X-}\)
Itérations de Newton#
\(\frac{\text{DR}}{\text{DY}}\) est ici donné par:
\(\frac{\text{DR}}{\text{DY}}=\left[\begin{array}{cccccc}\frac{\partial {\text{LE}}_{ij}}{\partial {\sigma}_{kl}}& \frac{\partial {\text{LE}}_{ij}}{\partial {Q}_{\text{iso}}}& \frac{\partial {\text{LE}}_{ij}}{\partial R}& \frac{\partial {\text{LE}}_{ij}}{\partial {X}_{kl}}& \frac{\partial {\text{LE}}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{i}}& \frac{\partial {\text{LE}}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{d}}\\ \frac{\partial \text{LQ}}{\partial {\sigma}_{kl}}& \frac{\partial \text{LQ}}{\partial {Q}_{\text{iso}}}& \frac{\partial \text{LQ}}{\partial R}& \frac{\partial \text{LQ}}{\partial {X}_{kl}}& \frac{\partial \text{LQ}}{\partial {\mathrm{\Delta \lambda }}^{i}}& \frac{\partial \text{LQ}}{\partial {\mathrm{\Delta \lambda }}^{d}}\\ \frac{\partial \text{LR}}{\partial {\sigma}_{kl}}& \frac{\partial \text{LR}}{\partial {Q}_{\text{iso}}}& \frac{\partial \text{LR}}{\partial R}& \frac{\partial \text{LR}}{\partial {X}_{kl}}& \frac{\partial \text{LR}}{\partial {\mathrm{\Delta \lambda }}^{i}}& \frac{\partial \text{LR}}{\partial {\mathrm{\Delta \lambda }}^{d}}\\ \frac{\partial {\text{LX}}_{ij}}{\partial {\sigma}_{kl}}& \frac{\partial {\text{LX}}_{ij}}{\partial {Q}_{\text{iso}}}& \frac{\partial {\text{LX}}_{ij}}{\partial R}& \frac{\partial {\text{LX}}_{ij}}{\partial {X}_{kl}}& \frac{\partial {\text{LX}}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{i}}& \frac{\partial {\text{LX}}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{d}}\\ \frac{\partial \text{FI}}{\partial {\sigma}_{kl}}& \frac{\partial \text{FI}}{\partial {Q}_{\text{iso}}}& \frac{\partial \text{FI}}{\partial R}& \frac{\partial \text{FI}}{\partial {X}_{kl}}& \frac{\partial \text{FI}}{\partial {\mathrm{\Delta \lambda }}^{i}}& \frac{\partial \text{FI}}{\partial {\mathrm{\Delta \lambda }}^{d}}\\ \frac{\partial \text{FD}}{\partial {\sigma}_{kl}}& \frac{\partial \text{FD}}{\partial {Q}_{\text{iso}}}& \frac{\partial \text{FD}}{\partial R}& \frac{\partial \text{FD}}{\partial {X}_{kl}}& \frac{\partial \text{FD}}{\partial {\mathrm{\Delta \lambda }}^{i}}& \frac{\partial \text{FD}}{\partial {\mathrm{\Delta \lambda }}^{d}}\end{array}\right]\)
où les nouveaux termes sont nuls:
\(\frac{\partial \text{LQ}}{\partial R}=0\) , \(\frac{\partial \text{LQ}}{\partial {X}_{kl}}=0\) , \(\frac{\partial \text{LQ}}{\partial {\mathrm{\Delta \lambda }}^{d}}=0\) , \(\frac{\partial \text{LR}}{\partial {Q}_{\text{iso}}}=0\) , \(\frac{\partial \text{LR}}{\partial {\mathrm{\Delta \lambda }}^{i}}=0\) , \(\frac{\partial {\text{LX}}_{ij}}{\partial {Q}_{\text{iso}}}=0\) ,
\(\frac{\partial {\text{LX}}_{ij}}{\partial {\mathrm{\Delta \lambda }}^{i}}=0\) , \(\frac{\partial \text{FI}}{\partial R}=0\) , \(\frac{\partial \text{FI}}{\partial {X}_{kl}}=0\) , \(\frac{\partial \text{FI}}{\partial {\mathrm{\Delta \lambda }}^{d}}=0\) , \(\frac{\partial \text{FD}}{\partial {Q}_{\text{iso}}}=0\) , \(\frac{\partial \text{FD}}{\partial {\mathrm{\Delta \lambda }}^{i}}=0\)
et où les termes déjà définis restent inchangés, à l’exception de \(\frac{\partial {\text{LE}}_{ij}}{\partial {\sigma}_{kl}}\) qui devient:
\(\frac{\partial {\text{LE}}_{ij}}{\partial {\sigma}_{kl}}={\delta}_{\text{ik}}{\delta}_{\text{jl}}-{D}_{\text{ijmn}}^{\text{lineaire}}({\mathrm{\Delta \varepsilon }}_{\text{mn}}+\frac{1}{3}{\mathrm{\Delta \lambda }}^{i}{\delta}_{\text{mn}}-{\mathrm{\Delta \lambda }}^{d}{G}_{\text{mn}}^{d})\frac{n}{3{P}_{a}}{(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{n-1}{\delta}_{kl}+{D}_{\text{ijmn}}{\mathrm{\Delta \lambda }}^{d}\frac{\partial {G}_{\text{mn}}^{d}}{\partial {\sigma}_{kl}}\)
Test de convergence#
Le critère de convergence reste \(\frac{\parallel {\text{DY}}^{\text{p+1}}\parallel }{\parallel {Y}^{\text{p+1}}-{Y}^{0}\parallel }\) RESI_INTE_RELA
Procédure de relaxation basée sur une estimation des normales à la surface de charge déviatoire#
Lorsque le mécanisme plastique déviatoire intervient, une procédure de relaxation à l’intérieur des itérations de Newton est prise en compte. Celle-ci permet d’éviter certains problèmes d’oscillation dans le calcul de la solution \({Y}^{p+1}\) qui conduisent finalement à la non convergence de l’intégration numérique.
Ainsi, à l’iteration \(p+1\) , au lieu d’actualiser l’inconnue \({Y}^{p+1}\) par un incrément complet \({\mathrm{\delta Y}}^{p+1}\)
\({Y}^{p+1}={Y}^{p}+\delta {Y}^{p+1}\)
on pose
\({Y}_{m}^{p+1}={Y}^{p}+{\rho}_{m}\delta {Y}^{p+1}\)
et on cherche, en effectuant une boucle sur des sous-itérations \(m\) , à déterminer une valeur optimale du scalaire \({\rho}_{m}\) . Cette valeur est recherchée en considérant la rotation de la normale, dans le plan déviatoire, à la surface \({f}^{d}\) , au cours des sous-itérations. Cette normale, notée \({\tilde{n}}_{m}\) , s’exprime à partir des contraintes contenues dans le terme \({Y}_{m}^{p+1}\) par
\({\tilde{n}}_{m}=2h{({\theta}_{q})}^{5}{q}_{\text{II}}\frac{\partial {f}^{d}}{\partial {q}_{ij}}=(2+\gamma \cos(3{\theta}_{q})){q}_{ij}+\frac{\sqrt{6}\gamma }{{q}_{\text{II}}}\frac{\partial \det(q)}{\partial {q}_{ij}}\)
À partir de la valeur initiale \({\rho}_{0}=1.0\) , le processus mis en place consiste en les étapes suivantes:
calcul des normales \({\tilde{n}}_{m-1}\) et \({\tilde{n}}_{m}\)
calcul de l’angle de rotation \({\phi }_{m}\) entre ces normales: \(\cos{\mathrm{\phi }}_{m}=\frac{{\tilde{n}}_{m-1}:{\tilde{n}}_{m}}{\sqrt{{\tilde{n}}_{m-1}}\sqrt{{\tilde{n}}_{m}}}\)
test sur l’évolution \(\cos{\mathrm{\phi }}_{m}\) :
si \(\cos{\mathrm{\phi }}_{m}\le \text{TOLROT}\) alors \({\rho}_{m+1}=\text{DECREL}{\rho}_{m}\) et \(m=m+1\)
sinon fin des sous-itérations et \({Y}^{p+1}={Y}_{m}^{p+1}\)
Redécoupage du pas de temps#
Comme pour la plupart des relations de comportement, il a été introduit pour le modèle CJS la possibilité de redécouper localement (aux points de Gauss) le pas de temps afin de faciliter l’intégration numérique. Cette possibilité est gérée par l’opérande ITER_INTE_PAS du mot clé CONVERGENCE de l’opérateur STAT_NON_LINE. Si itepas, la valeur de ITER_INTE_PAS, vaut 0, 1 ou -1 il n’y a aucun redécoupage (remarque: 0 est la valeur par défaut). Si itepas est positif le redécoupage est automatique, s’il est négatif le redécoupage n’est pris en compte qu’en cas de non convergence avec le pas de temps initial.
Le redécoupage consiste à réaliser, après la phase de prédiction élastique, l’intégration du ou des mécanismes plastiques mis en jeux avec un incrément de déformation dont les composantes correspondent aux composantes de l’incrément de déformation initial divisées par la valeur absolue de itepas.
Remarques diverses#
Calcul du terme \(\cos({\theta}_{s}-{\theta}_{q})\)#
Le terme \(\cos({\theta}_{s}-{\theta}_{q})\) apparaît dans l’expression de \({\varphi}_{o}\) . Nous avons adopté pour son calcul la même méthode que celle utilisée à l’ECL. C’est-à-dire que nous déterminons les angles \({\theta}_{s}\) et \({\theta}_{q}\) de la manière qui suit:
\({\theta}_{s}=\frac{1}{3}\text{Arctan}(\frac{\sqrt{\text{1-}{\cos}^{2}(3{\theta}_{s})}}{\cos(3{\theta}_{s})})\) et \({\theta}_{q}=\frac{1}{3}\text{Arctan}(\frac{\sqrt{\text{1-}{\cos}^{2}({\mathrm{3\theta }}_{q})}}{\cos({\mathrm{3\theta }}_{q})})\)
puis nous prenons le cosinus de la différence.
Ces expressions de \({\theta}_{s}\) et \({\theta}_{q}\) servent également pour le calcul de:
\(\frac{\partial \cos({\theta}_{s}-{\theta}_{q})}{\partial {\sigma}_{kl}}=-\sin({\theta}_{s}-{\theta}_{q})(\frac{\partial {\theta}_{s}}{\partial {\sigma}_{kl}}-\frac{\partial {\theta}_{q}}{\partial {\sigma}_{kl}})\)
avec \(\frac{\partial {\theta}_{s}}{\partial {\sigma}_{kl}}=-\frac{1}{3}\sqrt{1-{\cos}^{2}({\mathrm{3\theta }}_{s})}\frac{\sqrt{54}}{{q}_{\text{II}}^{3}}({t}_{kl}-3\frac{\det(q)}{{q}_{\text{II}}^{2}}{q}_{kl})\)
Calcul de \({R}_{r}\)#
Le rayon de rupture introduit dans le modèle CJS3 est donné par la formule
\({R}_{r}={R}_{c}+\mu \ln(\frac{3{p}_{c}}{{I}_{1}+{Q}_{\text{init}}})\)
En fait, lorsque \(\frac{{I}_{1}+{Q}_{\text{init}}}{3}>{p}_{c}\) , on doit bloquer \({R}_{r}\) à la valeur de \({R}_{c}\) . Le domaine de dilatence disparaît et on n’admet pas que \({R}_{r}\) puisse diminuer en deçà de \({R}_{c}\) . Par conséquent, on introduit, à la place de la formulation précédente, l’expression suivante
\({R}_{r}={R}_{c}+\mu \max\left[0,\ln(\frac{3{p}_{c}}{{I}_{1}+{Q}_{\text{init}}})\right]\)
Traction#
Sans cohésion, le domaine de traction qui correspond à des contraintes positives est inadmissible pour les sols. Du point de vue de l’intégration du modèle CJS, lorsque l’état des contraintes tend vers le sommet du cône de la surface de charge, le risque numérique de basculer dans ce domaine interdit augmente. Or lorsque que l’on se projette ou lorsque l’on fait une prédiction en un point de ce domaine, le calcul numérique aboutit soit à un résultat erroné, soit à une erreur fatale. En effet, la traction se manifeste numériquement par une valeur de \({I}_{1}\) positive. Cette valeur pose ensuite problème au moment d’évaluer certaines quantités comme \({(\frac{{I}_{1}^{+}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1.5}\) ; par ailleurs elle engendrerait d’un point de vue théorique une valeur \({q}_{\text{II}}\) négative d’après l’équation de la surface de charge déviatoire.
Un tel phénomène a été détecté à plusieurs niveaux: de façon particulière dans la prédiction élastique avec le modèle CJS1, et de façon générale dans les itérations de Newton locales faisant intervenir le mécanisme déviatoire. La même réponse a été apportée afin de s’affranchir de cette pathologie: il s’agit de projeter virtuellement les contraintes dans le domaine élastique sur l’axe hydrostatique en posant:
\(\begin{array}{}{\sigma}_{11}={\sigma}_{22}={\sigma}_{33}=-1\text{kPa}\\ {\sigma}_{12}={\sigma}_{13}={\sigma}_{23}=0\end{array}\)
On repositionne ainsi l’état de contraintes dans le domaine de compression en s’éloignant peu de la prédiction initiale inadmissible envisagée, et en espérant que les considérations de structures permettront au calcul global de converger.
De plus les variables internes n’évoluent pas et on suppose être revenu dans le domaine élastique
Opérateur tangent#
L’opérateur tangent appelé par l’option RIGI_MECA_TANG correspond à l’opérateur tangent déduit du problème en vitesse et calculé à partir des résultats connus à l’instant t.
L’opérateur tangent appelé par l’option FULL_MECA devrait correspondre à l’opérateur tangent au problème discrétisé de façon implicite. En réalité, nous n’avons pas effectué ce calcul. Nous prenons alors, lorsque l’option FULL_MECA est retenue, l’opérateur tangent déduit du problème en vitesse et calculé à partir des résultats connus à l’instant t+dt.
Nous détaillons ci-dessous l’opérateur tangent déduit du problème en vitesse en fonction du ou des mécanismes mis en jeu.
Opérateur tangent du mécanisme élastique non linéaire#
Nous avons simplement la relation élastique non linéaire suivante:
\({\dot{\sigma}}_{ij}={D}_{ijkl}(\sigma ){\dot{\varepsilon}}_{kl}={(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{n}{D}_{ijkl}^{\text{lineaire}}{\dot{\varepsilon}}_{kl}\)
d’où immédiatement l’opérateur tangent:
\({H}_{ijkl}^{\text{elas}.\text{nl}}={(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{n}{D}_{ijkl}^{\text{lineaire}}\)
Opérateur tangent des mécanismes élastique et plastique isotropes#
Dans ce cas, nous avons la relation suivante:
\({\dot{\sigma}}_{ij}={D}_{ijkl}(\sigma )({\dot{\varepsilon}}_{kl}-{\dot{\varepsilon}}_{kl}^{\text{ip}})={D}_{ijkl}(\sigma )({\dot{\varepsilon}}_{kl}+\frac{1}{3}{\dot{\lambda}}^{i}{\delta}_{kl})\)
il vient: \({\dot{I}}_{1}=3K({\dot{\varepsilon}}_{v}+{\dot{\lambda}}^{i})\)
En tenant compte de cette relation et de la loi d’écrouissage de \({Q}_{\text{iso}}\) , la condition \({\dot{f}}^{i}=0\) devient:
\({\dot{f}}^{i}=-\frac{{\dot{I}}_{1}}{3}+{\dot{Q}}_{\text{iso}}=-K({\dot{\varepsilon}}_{v}+{\dot{\lambda}}^{i})-{K}^{p}{\dot{\lambda}}^{i}=0\)
soit: \({\dot{\lambda}}^{i}=-\frac{K}{K+{K}^{p}}{\dot{\varepsilon}}_{v}\)
En reportant ce résultat dans l’expression de \({\dot{\sigma}}_{ij}\) , on trouve:
\({\dot{\sigma}}_{ij}={D}_{ijkl}({\dot{\varepsilon}}_{kl}-\frac{1}{3}\frac{K}{K+{K}^{p}}{\dot{\varepsilon}}_{\text{mm}}{\delta}_{kl})=({D}_{ijkl}-\frac{1}{3}\frac{K}{K+{K}^{p}}{D}_{\text{ijmn}}{\delta}_{\text{mn}}{\delta}_{kl}){\dot{\varepsilon}}_{kl}\)
d’où l’opérateur tangent:
\({H}_{ijkl}^{\text{ip}}={D}_{ijkl}-\frac{1}{3}\frac{K}{K+{K}^{p}}{D}_{\text{ijmn}}{\delta}_{\text{mn}}{\delta}_{kl}\)
On peut aussi écrire sous forme matricielle:
\({H}^{\text{ip}}={(\frac{{I}_{1}}{3{P}_{a}})}^{n}\left[\begin{array}{cccccc}\lambda -\mathrm{\chi}+2\mu & \lambda -\mathrm{\chi}& \lambda -\mathrm{\chi}& 0& 0& 0\\ \lambda -\mathrm{\chi}& \lambda -\mathrm{\chi}+2\mu & \lambda -\mathrm{\chi}& 0& 0& 0\\ \lambda -\mathrm{\chi}& \lambda -\mathrm{\chi}& \lambda -\mathrm{\chi}+2\mu & 0& 0& 0\\ 0& 0& 0& 2\mu & 0& 0\\ 0& 0& 0& 0& 2\mu & 0\\ 0& 0& 0& 0& 0& 2\mu \end{array}\right]\)
où pour cette formule uniquement \(\lambda ` et :math:\)mu ` sont les coefficient de Lamé et \(\mathrm{\chi}=\frac{{K}_{o}^{{e}^{2}}}{{K}_{o}^{e}+{K}_{o}^{p}}\) .
Opérateur tangent des mécanismes élastique et plastique déviatoire#
La condition \({\dot{f}}^{d}=0\) s’écrit:
\({\dot{f}}^{d}=\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{\dot{\sigma}}_{ij}+\frac{\partial {f}^{d}}{\partial R}\dot{R}+\frac{\partial {f}^{d}}{\partial {X}_{ij}}{\dot{X}}_{ij}=\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{\dot{\sigma}}_{ij}+\frac{\partial {f}^{d}}{\partial R}{\dot{\lambda}}^{d}{G}^{R}+\frac{\partial {f}^{d}}{\partial {X}_{ij}}{\dot{\lambda}}^{d}{G}_{ij}^{X}=0\)
Le tenseur \({G}^{X}\) étant purement déviatoire, le produit \(\frac{\partial {f}^{d}}{\partial {X}_{ij}}{G}_{ij}^{X}\) se réduit à:
\(\frac{\partial {f}^{d}}{\partial {X}_{ij}}{G}_{ij}^{X}=\text{dev}(\frac{\partial {f}^{d}}{\partial {X}_{ij}}){G}_{ij}^{X}=-{I}_{1}{Q}_{ij}{G}_{ij}^{X}\)
Le multiplicateur plastique peut donc se mettre sous la forme:
\({\dot{\lambda}}^{d}=\frac{1}{{H}^{\text{dev}}}\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{\dot{\sigma}}_{ij}\)
en faisant apparaître le module plastique \({H}^{\text{dev}}\) , donné par:
\({H}^{\text{dev}}={I}_{1}^{2}{(\frac{{I}_{1}+{Q}_{\text{init}}}{3{P}_{a}})}^{-1,5}\left[A{(1-\frac{R}{{R}_{m}})}^{2}+\frac{1}{b}{Q}_{ij}({Q}_{ij}+\varphi {X}_{ij})\right]\)
La relation contraintes - déformations permet alors d’écrire:
\(\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{\dot{\sigma}}_{ij}=\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}({\dot{\varepsilon}}_{kl}-{\dot{\lambda}}^{d}{G}_{kl}^{d})=\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}{\dot{\varepsilon}}_{kl}-{\dot{\lambda}}^{d}\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}{G}_{kl}^{d}\)
ce qui donne finalement pour le multiplicateur plastique:
\({\dot{\lambda}}^{d}=\frac{\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}{\dot{\varepsilon}}_{kl}}{{H}^{\text{dev}}+\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}{G}_{kl}^{d}}\)
En reportant ce résultat dans l’expression de \({\dot{\sigma}}_{ij}\) , on trouve:
\({\dot{\sigma}}_{ij}={D}_{ijkl}({\dot{\varepsilon}}_{kl}-\frac{\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{pq}}}{D}_{\text{pqmn}}{\dot{\varepsilon}}_{\text{mn}}}{{H}^{\text{dev}}+\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}{D}_{\text{rstu}}{G}_{\text{tu}}^{d}}{G}_{kl}^{d})\)
d’où l’opérateur tangent:
\({H}_{ijkl}^{\text{dp}}={D}_{ijkl}-{D}_{\text{ijmn}}{G}_{\text{mn}}^{d}\frac{\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{pq}}}{D}_{\text{pqkl}}}{{H}^{\text{dev}}+\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}{D}_{\text{rstu}}{G}_{\text{tu}}^{d}}\)
L’opérateur tangent ainsi obtenu n’est pas symétrique. Or pour l’instant la loi CJS s’appuie sur des éléments finis qui réclament un opérateur symétrique. En définitive, nous retenons non pas \({H}_{ijkl}^{\text{dp}}\) mais \({\tilde{H}}_{ijkl}^{\text{dp}}\) qui est donné par:
\({\tilde{H}}_{ijkl}^{\text{dp}}=\frac{{H}_{ijkl}^{\text{dp}}+{H}_{\text{klij}}^{\text{dp}}}{2}\) avec \(ij\) et \(kl\) pris dans \((11,22,33,12,13,23)\)
Opérateur tangent des mécanismes élastique, plastiques isotrope et déviatoire#
On doit satisfaire les deux conditions suivantes: \({\dot{f}}^{i}=0\) et \({\dot{f}}^{d}=0\) . Compte tenu de la relation contraintes - déformations qui s’écrit:
\({\dot{\sigma}}_{ij}={D}_{ijkl}({\dot{\varepsilon}}_{kl}+\frac{1}{3}{\dot{\lambda}}^{i}{\delta}_{kl}-{\dot{\lambda}}^{d}{G}_{kl}^{d})\)
la première condition donne:
\({\dot{f}}^{i}=-K({\dot{\varepsilon}}_{v}+{\dot{\lambda}}^{i}-{\dot{\lambda}}^{d}{G}_{v}^{d})-{K}^{p}{\dot{\lambda}}^{i}=0\)
où l’on a posé \({G}_{v}^{d}={G}_{kk}^{d}=\text{tr}({G}^{d})\) .
La seconde condition aboutie à:
\(\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}{\dot{\varepsilon}}_{kl}+\frac{1}{3}{\dot{\lambda}}^{i}\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}{\delta}_{kl}-{\dot{\lambda}}^{d}\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}{G}_{kl}^{d}-{H}^{\text{dev}}{\dot{\lambda}}^{d}=0\)
Ainsi, les multiplicateurs plastiques \({\dot{\lambda}}^{i}\) et \({\dot{\lambda}}^{d}\) s’obtiennent en résolvant le système:
\(\lbrace \begin{array}{}-(K+{K}^{p}){\dot{\lambda}}^{i}+K{G}_{v}^{d}{\dot{\lambda}}^{d}=K{\dot{\varepsilon}}_{v}\\ -\frac{1}{3}\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}{\delta}_{kl}{\dot{\lambda}}^{i}+(\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}{G}_{kl}^{d}+{H}^{\text{dev}}){\dot{\lambda}}^{d}=\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}{\dot{\varepsilon}}_{kl}\end{array}\)
soit:
\({\dot{\lambda}}^{i}=\frac{K{G}_{v}^{d}\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}{\dot{\varepsilon}}_{kl}-(\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{mn}}}{D}_{\text{mnpq}}{G}_{\text{pq}}^{d}+{H}^{\text{dev}})K{\dot{\varepsilon}}_{v}}{(K+{K}^{p})(\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}{D}_{\text{rstu}}{G}_{\text{tu}}^{d}+{H}^{\text{dev}})-\frac{1}{3}K{G}_{v}^{d}\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{vw}}}{D}_{\text{wvxy}}{\delta}_{xy}}\)
\({\dot{\lambda}}^{d}=\frac{(K+{K}^{p})\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}{\dot{\varepsilon}}_{kl}-\frac{1}{3}K\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{mn}}}{D}_{\text{mnpq}}{\delta}_{\text{pq}}{\dot{\varepsilon}}_{v}}{(K+{K}^{p})(\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}{D}_{\text{rstu}}{G}_{\text{tu}}^{d}+{H}^{\text{dev}})-\frac{1}{3}K{G}_{v}^{d}\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{vw}}}{D}_{\text{vwxy}}{\delta}_{xy}}\)
Ces expressions s’écrivent encore:
\({\dot{\lambda}}^{i}={T}_{{1}_{kl}}{\dot{\varepsilon}}_{kl}\) et \({\dot{\lambda}}^{d}={T}_{{2}_{kl}}{\dot{\varepsilon}}_{kl}\)
où les tenseurs \({T}_{1}\) et \({T}_{2}\) sont donnés par:
\({T}_{{1}_{kl}}=\frac{K{G}_{v}^{d}\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}-(\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{mn}}}{D}_{\text{mnpq}}{G}_{\text{pq}}^{d}+{H}^{\text{dev}})K{\delta}_{kl}}{(K+{K}^{p})(\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}{D}_{\text{rstu}}{G}_{\text{tu}}^{d}+{H}^{\text{dev}})-\frac{1}{3}K{G}_{v}^{d}\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{vw}}}{D}_{\text{vwxy}}{\delta}_{xy}}\)
\({T}_{{2}_{kl}}=\frac{(K+{K}^{p})\frac{\partial {f}^{d}}{\partial {\sigma}_{ij}}{D}_{ijkl}-\frac{1}{3}K\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{mn}}}{D}_{\text{mnpq}}{\delta}_{\text{pq}}{\delta}_{kl}}{(K+{K}^{p})(\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{rs}}}{D}_{\text{rstu}}{G}_{\text{tu}}^{d}+{H}^{\text{dev}})-\frac{1}{3}K{G}_{v}^{d}\frac{\partial {f}^{d}}{\partial {\sigma}_{\text{vw}}}{D}_{\text{vwxy}}{\delta}_{xy}}\)
En reportant les expressions \({\dot{\lambda}}^{i}\) et \({\dot{\lambda}}^{d}\) de dans la formule de \({\dot{\sigma}}_{ij}\) , on trouve:
\({\dot{\sigma}}_{ij}={D}_{ijkl}({\dot{\varepsilon}}_{kl}+\frac{1}{3}{T}_{{1}_{\text{nm}}}{\dot{\varepsilon}}_{\text{nm}}{\delta}_{kl}-{T}_{{2}_{\text{pq}}}{\dot{\varepsilon}}_{\text{pq}}{G}_{kl}^{d})\)
d’où l’opérateur tangent:
\({H}_{ijkl}^{\text{idp}}={D}_{ijkl}+\frac{1}{3}{D}_{\text{ijmn}}{\delta}_{\text{mn}}{T}_{{1}_{kl}}-{D}_{\text{ijpq}}{G}_{\text{pq}}^{d}{T}_{{2}_{kl}}\)
Cet opérateur tangent n’étant pas symétrique, nous retenons non pas \({H}_{ijkl}^{\text{idp}}\) mais \({\tilde{H}}_{ijkl}^{\text{idp}}\) qui est donné par:
\({\tilde{H}}_{ijkl}^{\text{idp}}=\frac{{H}_{ijkl}^{\text{idp}}+{H}_{\text{klij}}^{\text{idp}}}{2}\) avec \(ij\) et \(kl\) pris dans \((11,22,33,12,13,23)\)
Sources Aster#
Liste des routines modifiées et ajoutées#
Seule la routine nmcomp.f a été modifiée. Elle permet d’appeler, lorsque le comportement CJS est choisi, la routine nmcjs.f, point de départ de l’intégration de la loi.
L’ensemble des routines fortran développées dans le cadre de l’intégration de la loi CJS dans le code_aster est le suivant:
cjsc3q.f, cjsci1.f, cjsdtd.f, cjsela.f, cjside.f, cjsiid.f,
cjsjde.f, cjsjid.f, cjsjis.f, cjsmat.f, cjsmde.f, cjsmid.f,
cjsmis.f, cjsnor.f, cjspla.f, cjsqco.f, cjsqij.f, cjssmd.f,
cjssmi.f, cjst.f, cjstde.f, cjstel.f, cjstid.f, cjstis.f,
lcdete.f, nmcjs.f, cjsinp.f, cjsncn.f, cjsncv.f, cjsnvi.f,
cjsqq.f.
Organigramme général des principales routines#
Les principales routines FORTRAN pour l’intégration de la loi CJS s’enchaînent de la façon suivante:
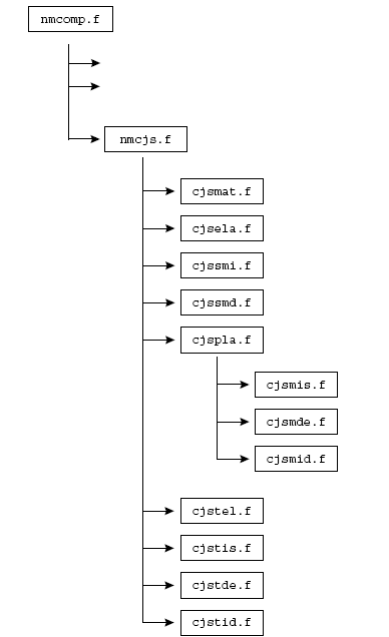
Détails des fonctionnalités des routines FORTRAN développées#
Routine : CJSC3Q#
Objectif:
calcul de \(\cos(3{\theta}_{q})\)
Variables d’entrée et de sortie:
IN SIG : CONTRAINTES
X : VARIABLES ECROUI CINE
PA : PRESS ATMOSPHERIQUE ( DONNEE MATERIAU)
OUT Q : DEV(SIG)-TRACE(SIG)*X
QII : SQRT(QIJ*QIJ)
COS3TQ : SQRT(54)*DET(Q)/(QII**3)
Routine : CJSCI1#
Objectif:
résolution de l’équation \({I}_{1}^{+}-{I}_{1}^{-}-3{K}_{o}^{e}{(\frac{{I}_{1}^{+}}{3{P}_{a}})}^{n}\text{tr}(\Delta \varepsilon )=0\) par la méthode de la sécante, pour le comportement élastique non linéaire
Variables d’entrée et de sortie:
IN CRIT : CRITERES DE CONVERGENCE
MATER : COEFFICIENTS MATERIAU A T+DT
DEPS : INCREMENT DE DEFORMATION
SIGD : CONTRAINTE A T
OUT I1 : TRACE DE SIG A T+DT
TRACT: VARIABLE LOGIQUE INDIQUANT LA TRACTION
Routine : CJSDTD#
Objectif:
calcul de la dérivée du tenseur \({t}^{d}\) par rapport à \(q\)
Variables d’entrée et de sortie:
IN MOD : MODELISATION
Q : TENSEUR (6 COMPOSANTES)
OUT DTDDQ : TENSEUR RESULTAT (6 COMPOSANTES)
Routine : CJSELA#
Objectif:
calcul élastique non linéaire des contraintes
Variables d’entrée et de sortie:
IN MOD : MODELISATION
CRIT : CRITERES DE CONVERGENCE
MATERF : COEFFICIENTS MATERIAU A T+DT
SIGD : CONTRAINTE A T
DEPS : INCREMENT DE DEFORMATION
OUT SIGF : CONTRAINTE A T+DT
Organisation de CJSELA
calcul du premier invariant des contraintes I1 à t+dt:
appel de CJSCI1
calcul des coefficients de la matrice élastique et assemblage de la matrice
calcul de l’incrément des contraintes et des contraintes à t+dt:
appel de LCPRMV et LCSOVE
Routine : CJSIDE#
Objectif:
pour l’intégration du mécanisme plastique déviatoire, calcul d’une solution d’essai afin d’amorcer ensuite les itérations de Newton locales.
Variables d’entrée et de sortie:
IN MOD : MODELISATION
MATER : COEFFICIENTS MATERIAU A T+DT
EPSD : DEFORMATION A T+DT
DEPS : INCREMENT DE DEFORMATION
YD : VARIABLES A T = (SIGD, VIND, LAMB)
VAR GD : TENSEUR DE LA LOI D ECOULEMENT PLASTIQUE DEV.
OUT DY : SOLUTION D ESSAI
Organisation de CJSIDE
calcul de l’opérateur élastique,
calcul de lois d’écrouissage \({G}^{R}\) et \({G}^{X}\) ,
calcul de la loi d’écoulement du mécanisme plastique déviatoire \({G}^{d}\) ,
calcul du seuil \({f}^{d}\) , de sa dérivée \(\frac{\partial {f}^{d}}{\partial {\mathrm{\Delta \lambda }}^{d}}\) et du multiplicateur plastique \({\mathrm{\Delta \lambda }}^{d}\) ,
calcul de la solution d’essai
Routine : CJSIID#
Objectif:
pour l’intégration simultanée des mécanismes plastiques isotrope et déviatoire, calcul d’une solution d’essai afin d’amorcer ensuite les itérations de Newton locales.
Variables d’entrée et de sortie:
IN MOD : MODELISATION
MATER : COEFFICIENTS MATERIAU A T+DT
EPSD : DEFORMATION A T+DT
DEPS : INCREMENT DE DEFORMATIONu
YD : VARIABLES A T = (SIGD, VIND, LAMB)
VAR GD : TENSEUR DE LA LOI D ECOULEMENT PLASTIQUE DEV.
OUT DY : SOLUTION D ESSAI
Organisation de CJSIID
calcul de l’opérateur élastique,
calcul de lois d’écrouissage \({G}^{R}\) et \({G}^{X}\) ,
calcul de la loi d’écoulement du mécanisme plastique déviatoire \({G}^{d}\) ,
calcul des seuils \({f}^{i}\) et \({f}^{d}\) , de leurs dérivées \(\frac{\partial {f}^{i}}{\partial {\mathrm{\Delta \lambda }}^{i}}\) , \(\frac{\partial {f}^{i}}{\partial {\mathrm{\Delta \lambda }}^{d}}\) , \(\frac{\partial {f}^{d}}{\partial {\mathrm{\Delta \lambda }}^{i}}\) et \(\frac{\partial {f}^{d}}{\partial {\mathrm{\Delta \lambda }}^{d}}\) , et des multiplicateurs plastiques \({\mathrm{\Delta \lambda }}^{i}\) et \({\mathrm{\Delta \lambda }}^{d}\) ,
calcul de la solution d’essai
Routine : CJSJDE#
Objectif:
calcul de \(\text{DRDY}\) et \(R\) pour la résolution de \(\frac{\text{DR}}{\text{DY}}({Y}^{p}){\text{DY}}^{\text{p+1}}=-R({Y}^{p})\) (mécanisme plastique déviatoire)
Variables d’entrée et de sortie:
IN MOD : MODELISATION
MATER : COEFFICIENTS MATERIAU A T+DT
EPSD : DEFORMATION A T
DEPS : INCREMENT DE DEFORMATION
YD : VARIABLES A T = (SIGD, VIND, LAMBDD)
YF : VARIABLES A T+DT = (SIGF, VINF, LAMBDF)
VAR GD : TENSEUR DE LA LOI D ECOULEMENT PLASTIQUE DEV.
OUT R : SECOND MEMBRE
SIGNE : SIGNE DE S:DEPSDP
DRDY : JACOBIEN
Organisation de CJSJDE
calcul de l’opérateur élastique,
calcul de lois d’écrouissage \({G}^{R}\) et \({G}^{X}\) ,
calcul de la loi d’écoulement du mécanisme plastique déviatoire \({G}^{d}\) ,
calcul de multiples dérivées intermédiaires
calcul des termes \(\frac{\partial {G}^{R}}{\partial {\sigma}_{ij}}\) , \(\frac{\partial {G}^{R}}{\partial R}\) , \(\frac{\partial {G}_{\text{mn}}^{X}}{\partial {\sigma}_{ij}}\) , \(\frac{\partial {G}_{\text{mn}}^{X}}{\partial {X}_{ij}}\) , \(\frac{\partial {G}_{\text{mn}}^{d}}{\partial {\sigma}_{ij}}\) , \(\frac{\partial {G}_{\text{mn}}^{d}}{\partial R}\) , \(\frac{\partial {G}_{\text{mn}}^{d}}{\partial {X}_{ij}}\)
calcul des composantes de \(\text{DRDY}\) et \(R\)
assemblage de \(\text{DRDY}\) et \(R\)
Routine : CJSJID#
Objectif:
calcul de \(\text{DRDY}\) et \(R\) pour la résolution de \(\frac{\text{DR}}{\text{DY}}({Y}^{p}){\text{DY}}^{\text{p+1}}=-R({Y}^{p})\) (mécanismes plastiques isotrope et déviatoire)
Variables d’entrée et de sortie:
IN MOD : MODELISATION
MATER : COEFFICIENTS MATERIAU A T+DT
EPSD : DEFORMATION A T
DEPS : INCREMENT DE DEFORMATION
YD : VARIABLES A T = (SIGD, VIND, LAMBDD)
YF : VARIABLES A T+DT = (SIGF, VINF, LAMBDF)
VAR GD : TENSEUR DE LA LOI D ECOULEMENT PLASTIQUE DEV.
OUT R : SECOND MEMBRE
SIGNE : SIGNE DE S:DEPSDP
DRDY : JACOBIEN
Organisation de CJSJID
calcul de l’opérateur élastique,
calcul de lois d’écrouissage \({G}^{{Q}_{\text{iso}}}\) , \({G}^{R}\) et \({G}^{X}\) ,
calcul de la loi d’écoulement du mécanisme plastique déviatoire \({G}^{d}\) ,
calcul de multiples dérivées intermédiaires
calcul des termes \(\frac{\partial {G}^{{Q}_{\text{iso}}}}{\partial {Q}_{\text{iso}}}\) , \(\frac{\partial {G}^{R}}{\partial {\sigma}_{ij}}\) , \(\frac{\partial {G}^{R}}{\partial R}\) , \(\frac{\partial {G}_{\text{mn}}^{X}}{\partial {\sigma}_{ij}}\) , \(\frac{\partial {G}_{\text{mn}}^{X}}{\partial {X}_{ij}}\) , \(\frac{\partial {G}_{\text{mn}}^{d}}{\partial {\sigma}_{ij}}\) , \(\frac{\partial {G}_{\text{mn}}^{d}}{\partial R}\) , \(\frac{\partial {G}_{\text{mn}}^{d}}{\partial {X}_{ij}}\)
calcul des composantes de \(\text{DRDY}\) et \(R\)
assemblage de \(\text{DRDY}\) et \(R\)
Routine : CJSJIS#
Objectif:
calcul de \(\text{DRDY}\) et \(R\) pour la résolution de \(\frac{\text{DR}}{\text{DY}}({Y}^{p}){\text{DY}}^{\text{p+1}}=-R({Y}^{p})\) (mécanisme plastique isotrope)
Variables d’entrée et de sortie:
IN MOD : MODELISATION
MATER : COEFFICIENTS MATERIAU A T+DT
DEPS : INCREMENT DE DEFORMATION
YD : VARIABLES A T = (SIGD, VIND, LAMBDD)
YF : VARIABLES A T+DT = (SIGF, VINF, LAMBDF)
OUT R : SECOND MEMBRE
DRDY : JACOBIEN
Organisation de CJSJIS
calcul de l’opérateur élastique,
calcul des composantes de \(\text{DRDY}\) et \(R\)
assemblage de \(\text{DRDY}\) et \(R\)
Routine : CJSMAT#
Objectif:
récupération de données matériaux, du nombre de composantes des champs, du nombre de variables internes et du niveau CJS choisi.
Variables d’entrée et de sortie:
IN IMAT : ADRESSE DU MATERIAU CODE
MOD : TYPE DE MODELISATION
TEMPF : TEMPERATURE A T+DT
OUT MATERF : COEFFICIENTS MATERIAU A T+DT
NDT : NB TOTAL DE COMPOSANTES TENSEURS
NDI : NB DE COMPOSANTES DIRECTES TENSEURS
NVI : NB DE VARIABLES INTERNES
NIVCJS : NIVEAU 1, 2 OU 3 DE LA LOI CJS
Organisation de CJSMAT
récupération du nombre de composantes des champs et du nombre de variables internes en fonction de la modélisation choisie,
récupération de données matériaux,
reconnaissance du niveau CJS choisi en fonction des paramètres donnés.
Routine : CJSMDE#
Objectif:
calcul élasto-plastique des contraintes avec le mécanisme plastique deviatoire activé: résolution par la méthode de Newton de \(R(Y)=0\)
Variables d’entrée et de sortie:
IN MOD : MODELISATION
CRIT : CRITERES DE CONVERGENCE
MATER : COEFFICIENTS MATERIAU A T+DT
NVI : NB DE VARIABLES INTERNES
EPSD : DEFORMATIONS A T
DEPS : INCREMENT DE DEFORMATION
SIGD : CONTRAINTE A T
VIND : VARIABLES INTERNES A T
STOPNC : ARRET EN CAS DE NON CONVERGENCE
VAR SIGF : CONTRAINTE A T+DT
VINF : VARIABLES INTERNES A T+DT
NOCONV : PAS DE CONVERGENCE
Organisation de CJSMDE
initialisation de \(\text{YD}\) par l’état à t
calcul d’une solution d’essai avec CJSIDE
boucle sur les itérations de Newton
incrémentation \(\text{YF}=\text{YD}+\text{DY}\)
calcul de \(\text{DRDY}\) et \(R\) : CJSJDE
résolution du système par la méthode de Gauss : MTGAUS
actualisation de la solution \(\text{DY}\)
test de convergence
mise à jour des contraintes et variables internes
Routine : CJSMID#
Objectif:
calcul élasto-plastique des contraintes avec les mécanismes plastiques isotrope et deviatoire activés: résolution par la méthode de Newton de \(R(Y)=0\)
Variables d’entrée et de sortie:
IN MOD : MODELISATION
CRIT : CRITERES DE CONVERGENCE
MATER : COEFFICIENTS MATERIAU A T+DT
NVI : NB DE VARIABLES INTERNES
EPSD : DEFORMATIONS A T
DEPS : INCREMENT DE DEFORMATION
SIGD : CONTRAINTE A T
VIND : VARIABLES INTERNES A T
STOPNC : ARRET EN CAS DE NON CONVERGENCE
VAR SIGF : CONTRAINTE A T+DT
VINF : VARIABLES INTERNES A T+DT
NOCONV : PAS DE CONVERGENCE
Organisation de CJSMID
initialisation de \(\text{YD}\) par l’état à t
calcul d’une solution d’essai avec CJSIID
boucle sur les itérations de Newton
incrémentation \(\text{YF}=\text{YD}+\text{DY}\)
calcul de \(\text{DRDY}\) et \(R\) : CJSJID
résolution du système par la méthode de Gauss : MTGAUS
actualisation de la solution \(\text{DY}\)
test de convergence
mise à jour des contraintes et variables internes
Routine : CJSMIS#
Objectif:
calcul élasto-plastique des contraintes avec le mécanisme plastique isotrope activé: résolution par la méthode de Newton de \(R(Y)=0\)
Variables d’entrée et de sortie:
IN MOD : MODELISATION
CRIT : CRITERES DE CONVERGENCE
MATER : COEFFICIENTS MATERIAU A T+DT
DEPS : INCREMENT DE DEFORMATION
SIGD : CONTRAINTE A T
VIND : VARIABLES INTERNES A T
STOPNC : ARRET EN CAS DE NON CONVERGENCE
VAR SIGF : CONTRAINTE A T+DT
VINF : VARIABLES INTERNES A T+DT
NOCONV : PAS DE CONVERGENCE
Organisation de CJSMIS
initialisation de \(\text{YD}\) par la prédiction élastique
boucle sur les itérations de Newton
incrémentation \(\text{YF}=\text{YD}+\text{DY}\)
calcul de \(\text{DRDY}\) et \(R\) : CJSJIS
résolution du système par la méthode de Gauss : MTGAUS
actualisation de la solution \(\text{DY}\)
test de convergence
mise à jour des contraintes et variables internes
Routine : CJSNOR#
Objectif:
calcul d’un vecteur parallèle à \(\frac{\partial {f}^{d}}{\partial {q}_{ij}}\)
Variables d’entrée et de sortie:
IN MATER : MATERIAU
SIG : CONTRAINTES
X : VARIABLES INTERNES CINEMATIQUES
OUT NOR : ESTIMATION DE LA DITRECTION DE LA NORMALE A LA SURFACE DEVIATOIRE DANS LE PLAN DEVIATOIRE PERPENDICULAIRE A LA TRISECTRICE LE VECTEUR NOR(1:NDT) N EST PAS NORME SA NORME EST NOR(NDT+1)
Routine : CJSPLA#
Objectif:
calcul élasto-plastique des contraintes.
Variables d’entrée et de sortie:
IN MOD : MODELISATION
CRIT : CRITERES DE CONVERGENCE
MATER : COEFFICIENTS MATERIAU A T+DT
SEUILI : FONCTION DE CHARGE ISO. CALCULEE AVEC PREDICT ELAS
SEUILD : FONCTION DE CHARGE DEV. CALCULEE AVEC PREDICT ELAS
NVI : NOMBRE DE VARIABLES INTERNES
EPSD : DEFORMATIONS A T
DEPS : INCREMENT DE DEFORMATION
SIGD : CONTRAINTE A T
VIND : VARIABLES INTERNES A T
VAR SIGF : CONTRAINTE A T+DT (IN -> ELAS, OUT -> PLASTI )
OUT VINF : VARIABLES INTERNES A T+DT
MECANI : MECANISME(S) ACTIVE(S)
Organisation de CJSPLA
hypothèse sur le ou les mécanismes plastiques activés en fonction des valeurs des seuils \({f}^{i}\) et \({f}^{d}\) calculés à partir de la prédiction élastique,
traitement du redécoupage éventuel du pas de temps
sauvegarde de la prédiction élastique,
calcul élasto-plastique,
mécanisme plastique isotrope: CJSMIS
mécanisme plastique déviatoire: CJSMDE
mécanismes plastiques isotrope et déviatoire simultanément: CJSMID
calcul des seuils à partir des contraintes à t+dt
appel de CJSSMI et de CJSSMD
si (hypothèse d’un mécanisme isotrope et \({f}^{d}\) positif) ou (hypothèse d’un mécanisme déviatoire et \({f}^{i}\) positif): retour au calcul élasto-plastique avec mécanismes plastiques isotrope et déviatoire simultanément,
sinon fin de routine
Routine : CJSQCO#
Objectif:
routine utilitaire de CJS permettant le calcul de grandeurs standard listées ci-dessous
Variables d’entrée et de sortie:
IN GAMMA : PARAMETRE MATERIAU
SIG : CONTRAINTES
X : VARIABLES ECROUI CINE
PREF : PRESS REF POUR NORMALISATION
EPSSIG : EPSILON POUR NULLITE DEVIATEUR
I1 : TRACE DU TENSEUR DES CONTRAINTES
OUT S : DEV(SIG)
SII : SQRT(S:S)
SIIREL : SII/PREF
COS3TS : LODE(SIG)
HTS : FONCTION H(TETHA_S)
DETS : DETERMINANT DE S
Q : Q(SIG-X)
QII : SQRT(Q:Q)
QIIREL : QII/PREF
COS3TQ
HTQ : FONCTION H(TETHA_Q)
DETQ : DETERMINANT DE Q
Routine : CJSQIJ#
Objectif:
calcul du tenseur \({q}_{ij}\)
Variables d’entrée et de sortie:
IN N : DIMENSION DE S, X, Q
S : DEVIATEUR
I1 : PREMIER INV.
X : CENTRE DE LA SURFACE DE CHARGE DEVIATOIRE
OUT Q : TENSEUR RESULTAT
Routine : CJSSMD#
Objectif:
calcul du seuil du mécanisme plastique déviatoire.
Variables d’entrée et de sortie:
IN SIG : CONTRAINTE
VIN : VARIABLES INTERNES
OUT SEUILD : SEUIL ELASTICITE DU MECANISME DEVIATOIRE
Routine : CJSSMI#
Objectif:
calcul du seuil du mécanisme plastique isotrope.
Variables d’entrée et de sortie:
IN SIG : CONTRAINTE
VIN : VARIABLES INTERNES
OUT SEUILI : SEUIL ELASTICITE DU MECANISME ISOTROPE
Routine : CJST#
Objectif:
calcul de \(t\) = \(\frac{\partial \det s}{\partial s}\) .
Variables d’entrée et de sortie:
IN S : MATRICE
OUT T : T (SOUS FORME VECTORIELLE AVEC RAC2)
Routine : CJSTDE#
Objectif:
calcul de la matrice tangente pour le mécanisme plastique déviatoire
Variables d’entrée et de sortie:
IN MOD : MODELISATION
MATER : COEFFICIENTS MATERIAU
NVI : NB DE VARIABLES INTERNES
EPS : DEFORMATIONS
SIG : CONTRAINTES
VIN : VARIABLES INTERNES
OUT DSDESY : MATRICE TANGENTE SYMETRISEE
Organisation de CJSTDE
calcul de l’opérateur élastique,
calcul de lois d’écrouissage \({G}^{R}\) et \({G}^{X}\) ,
calcul de la loi d’écoulement du mécanisme plastique déviatoire \({G}^{d}\) ,
calcul de termes intermédiaires
calcul de la matrice tangente
symétrisation de la matrice tangente
Routine : CJSTEL#
Objectif:
calcul de la matrice tangente pour le mécanisme élastique
Variables d’entrée et de sortie:
IN MOD : MODELISATION
MATER : COEFFICIENTS MATERIAU
SIG : CONTRAINTES
OUT HOOK : OPERATEUR RIGIDITE ELASTIQUE
Organisation de CJSTEL
calcul de l’opérateur élastique
Routine : CJSTID#
Objectif:
calcul de la matrice tangente pour les mécanismes plastiques isotrope et déviatoire
Variables d’entrée et de sortie:
IN MOD : MODELISATION
MATER : COEFFICIENTS MATERIAU
NVI : NB DE VARIABLES INTERNES
EPS : DEFORMATIONS
SIG : CONTRAINTES
VIN : VARIABLES INTERNES
OUT DSDESY : MATRICE TANGENTE SYMETRISEE
Organisation de CJSTEL
calcul de l’opérateur élastique,
calcul de lois d’écrouissage \({G}^{R}\) et \({G}^{X}\) ,
calcul de la loi d’écoulement du mécanisme plastique déviatoire \({G}^{d}\) ,
calcul de termes intermédiaires
calcul de la matrice tangente
symétrisation de la matrice tangente
Routine : CJSTIS#
Objectif:
calcul de la matrice tangente pour le mécanisme plastique isotrope
Variables d’entrée et de sortie:
IN MOD : MODELISATION
MATER : COEFFICIENTS MATERIAU
SIG : CONTRAINTES
VIN : VARIABLES INTERNES
OUT DSDE : MATRICE TANGENTE
Organisation de CJSTEL
calcul de la matrice tangente
Routine : LCDETE#
Objectif:
calcul d’une matrice déterminant 33
Variables d’entrée et de sortie:
IN A : MATRICE
OUT LCDETE : DETERMINANT
Routine : NMCJS#
Objectif:
réalisation de l’intégration de la loi CJS: calcul des contraintes à t+dt et/ou de la matrice tangente, selon l’option de calcul choisie.
Variables d’entrée et de sortie:
IN TYPMOD TYPE DE MODELISATION
IMAT ADRESSE DU MATERIAU CODE
COMP COMPORTEMENT DE L ELEMENT
CRIT CRITERES LOCAUX
INSTAM INSTANT T
INSTAP INSTANT T+DT
TEMPM TEMPERATURE A T
TEMPF TEMPERATURE A T+DT
TREF TEMPERATURE DE REFERENCE
EPSD DEFORMATION TOTALE A T
DEPS INCREMENT DE DEFORMATION TOTALE
SIGD CONTRAINTE A T
VIND VARIABLES INTERNES A T + INDICATEUR ETAT T
OPT OPTION DE CALCUL A FAIRE
OUT SIGF CONTRAINTE A T+DT
VINF VARIABLES INTERNES A T+DT + INDICATEUR ETAT T+DT
DSDE MATRICE DE COMPORTEMENT TANGENT A T+DT OU T
Organisation de NMCJS
récupération de données matériaux, du nombre de composantes des champs, du nombre de variables internes et du niveau CJS choisi:
appel de CJSMAT
blocage de variables internes selon le niveau CJS choisi
calcul des contraintes à t+dt
prédiction élastique: CJSELA
calcul des seuils des mécanismes isotrope et déviatoire: CJSSMI et CJSSMD
si l’un des seuils est dépassé, calcul élasto-plastique: CJSPLA
calcul de la matrice tangente en fonction du mécanisme mis en jeu
élastique: CJSTEL
plastique isotrope: CJSTIS
plastique déviatoire: CJSTDE
plastique isotrope et déviatoire: CJSTID
Bibliographie#
M. MALEKI, B. CAMBOU, P. DUBUJET, « Modélisation hiérarchisée du comportement des sols », Revue Française de Génie Civil, Volume 4 - Issue 7-8, 2000. http://dx.doi.org/10.1080/12795119.2000.9692702.
CAMBOU, K. JAFARI, « Modèle de comportement des sols non cohérents », Rev. Franç. Géotech. n°44, p.p 43-55, 1988.
ELAMRANI, « Contribution à la validation du modèle CJS pour les matériaux granulaires », Thèse de Doctorat de l’École Centrale de Lyon, 1992.