v2.03.118 SDLS118 - Réponse d’une fondation circulaire rigide à une excitation sismique variable en espace#
Résumé:
Ce cas test permet de valider le calcul de la réponse d’une fondation superficielle rigide soumise à un mouvement sismique variable en espace via la macro DYNA_ISS_VARI. Les fonctions de transfert de référence proviennent de résultats obtenus par Mita et Luco [bib2].
La modélisation E est une validation informatique de la prise en compte d’accélérogrammes dans les trois directions de l’espace en un seul appel à DYNA_ISS_VARI.
Solution de référence#
Méthode de calcul#
On utilise la fonction de cohérence proposée par Luco et Wong(1986) [bib1]:
où \(>\) désigne la distance entre deux points \(>\) et \(>\) sur la fondation, \(>\) est la fréquence et \(>\) la vitesse apparente de propagation en surface de l’onde \(>\) . Le paramètre \(>\) peut varier de \(>\) à \(>\) en fonction du cas mais est généralement pris égal à \(>\) .
Grandeurs et résultats de référence#
Coefficients de covariance obtenus par Mita et Luco pour \(>\) [bib2]:
\(>\) |
\(>\) |
\(>\) |
1.0 |
0.732 |
0.730 |
2.0 |
0.402 |
0.416 |
3.0 |
0.251 |
0.270 |
a0 désigne la fréquence non dimensionnelle \(>\)
Pour \(>\) , on obtient le cas sans variabilité spatiale, Pour ce cas on connaît la solution (analytique). La fondation étant rigide sans poids, la réponse à une excitation unitaire est égale à \(>\) , indépendamment de la fréquence de calcul.
Incertitudes sur la solution#
Pas d’incertitudes.
Références bibliographiques#
[bib1] Luco J.E et Wong H.L.: Response of a rigid foundation to a spatially random ground motion . Earthquake Engrg. Struct. Dyn. 14, 1986, pp.891-908.
[bib2] Luco J.E et Mita A.: Response of a circular foundation to spatially random ground motion . J. Engrg.Mech. 113, 1987, pp.1-15.
Modélisation A#
Caractéristiques de la modélisation#
Les caractéristiques utilisées et le maillage sont ceux déduits des données du paragraphe 1. On a calculé la réponse harmonique et les fonctions de transfert pour les fréquences réduites \(>\) (où \(>\) ). Les résultats obtenus par Mita et Luco pour ces fréquences réduites sont présentés dans la référence [bib2].
Caractéristiques du maillage#
Le maillage de la fondation circulaire est représenté ci-dessous(voir §1.1) :
Grandeurs testées et résultats#
Pour le cas avec variabilité spatiale, on choisit \(>\) et on teste par rapport aux résultats de la littérature (SOURCE_EXTERNE) avec une tolérance de \(>\) .
Résultats obtenus avec DYNA_ISS_VARIpour \(>\) et :
\(>\) |
\(>\) |
\(>\) |
1.0 |
0.767 |
0.767 |
2.0 |
0.437 |
0.437 |
3.0 |
0.251 |
0.251 |
Pour rappel, les résultats de référence [bib2], voir aussi §2.2:
\(>\) |
\(>\) |
\(>\) |
1.0 |
0.732 |
0.730 |
2.0 |
0.402 |
0.416 |
3.0 |
0.251 |
0.270 |
On fait par ailleurs un test de NON_REGESSION pour les valeurs calculées par DYNA_ISS_VARI avec une tolérance de \(>\) (valeur par défaut).
Comparaison des fonctions de transfert \(>\) obtenues avec DYNA_ISS_VARI et avec Mita et Luco:
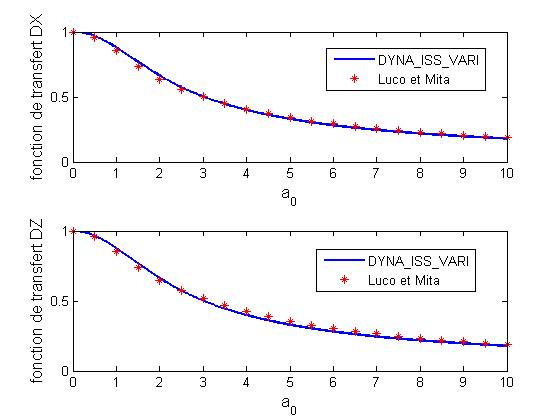
Pour le cas \(>\) , on teste la réponse après projection sur coordonnées physiques. La fondation étant rigide et sans masse, tous les nœuds subissent le même déplacement qui est égale à 1.0 en direction \(>\) pour une excitation en direction \(>\) .
\(>\)
\(>\) est la matrice d’impédance modale, \(>\) la réponse modale et \(>\) pour une excitation sismique en direction \(>\) et \(>\) pour un séisme vertical.
\(>\) |
\(>\) |
\(>\) |
1.0, 2.0 3.0 |
1.0 1,0 1,0 |
1.0 1,0 1,0 |
Avec une projection via REST_SPEC_PHYS, on obtient le résultat:
\(>\) |
SPEC N11 ‘DX’ |
SPEC N11 ‘DZ’ |
1.0 |
1.00527E+00 |
1.03014E+00 |
On effectue un test de type ANALYTIQUE avec une tolérance de \(>\) pour “DX” et \(>\) pour “DZ”.
Modélisation B#
Caractéristiques de la modélisation#
Les caractéristiques utilisées et le maillage sont ceux déduits des données du paragraphe 1. Le maillage est le même que pour la modélisation A.
On a calculé la réponse temporelle au point \(N11\) et détermine le spectre de réponse correspondant. La fonction de transfert étant égale à 1 pour le cas sans variabilité spatiale, la réponse temporelle est égale au signal d’entrée. Si on tient compte de la variabilité spatiale, alors la réponse est modifiée.
Dans cette modélisation, on teste les différentes fonctions de cohérence disponibles dans code_aster (MITA_LUCO, ABRAHAMSON, ABRA_ROCHER, ABRA_SOLMOYEN).
Caractéristiques du maillage#
Les caractéristiques sont celles de la modélisation A.
Grandeurs testées et résultats#
Fonction de cohérence de Mita & Luco#
On vérifie que, pour \(\alpha =0.0\) , la réponse en accélération est égale à l’accélérogramme en entrée du calcul (on rappelle que la fonction de transfert vaut 1 et que la fonction est rigide pour ce cas d’étude). On détermine la réponse \(q(t)\) en “DX” au point \(N11\) pour une excitation \(a(t)\) en “DX”. On calcule l’erreur comme l’écart-type de la différence (résidu) entre le signal et la réponse. Ceci est fait pour le cas où la fonction de transfert est calculé pour tous les points (discrétisation de l’accélérogramme) et pour le cas où l’utilisateur renseigne FREQ_PAS, FREQ_FIN. Dans ce dernier cas, DYNA_ISS_VARI interpole des valeurs calculés pour déterminer la réponse temporelle due à l’excitation par l’accélérogramme.
On ajoute également à ce cas un test de NON_REGRESSION pour la valeur de déplacement maximal positif en “DX” au point \(N11\) qui correspond au centre de la fondation.
type de test |
valeur de référence |
tolérance (abs.) |
|
ANALYTIQUE |
0.0 |
0.01 |
De même, pour \(\alpha =0.0\) , le spectre de réponse oscillateur (SRO) de la réponse en accélération calculée doit être égal au SRO de l’accélérogramme en entrée. Ainsi, on teste l’erreur, à savoir la différence entre ces deux SRO. On compare évalue notamment la différence maximale entre les deux SRO et l’écart-type de l’erreur
type de test |
valeur |
valeur de référence |
tolérance (abs.) |
ANALYTIQUE |
MAX |
0.0 |
0.01 |
ANALYTIQUE |
ECART-TYPE |
0.0 |
0.001 |
Pour le cas avec variabilité spatiale, les valeurs \(\alpha =0.7,{V}_{s}=200m/s\) ont été choisies. On considère une excitation sismique temporelle en direction “DX” donnée par un accélérogramme correspondant au spectre EUR pour un site rocheux (cf, courbe rouge de la figure ci-dessous). Il n’y a pas de solution de référence (analytique) pour ce cas. Aussi, on fait un test de NON_REGRESSION pour les SRO obtenus avec variabilité spatiale. On teste deux cas.
FREQ_FIN est égale à la fréquence de coupure :
type de test |
fréquence (Hz) |
référence SRO (g) |
tolérance (%) |
NON_REGRESSION |
10.0 |
5.34727E-01 |
2*10-4 |
NON_REGRESSION |
30.0 |
2.3855E-01 |
2*10-3 |
FREQ_FIN est inférieure à la fréquence de coupure ( \(35Hz\) au lieu de \(50Hz\) ) et on complète par zéro :
type de test |
fréquence (Hz) |
référence SRO (g) |
tolérance (%) |
||
NON_REGRESSION |
10.0 |
5.34727E-01 |
2*10-1 |
NON_REGRESSION |
30.0 |
2.3855E-01 |
2*10-2 |
Les spectre de réponse de l’accélérogramme ( SRO_ACCE ) et calculés en réponse au point \(N11\) , sans variabilité spatiale ( SRO_NVAR ) et avec variabilité spatiale ( SRO_VAR ), sont montrés sur la figure ci-dessous:
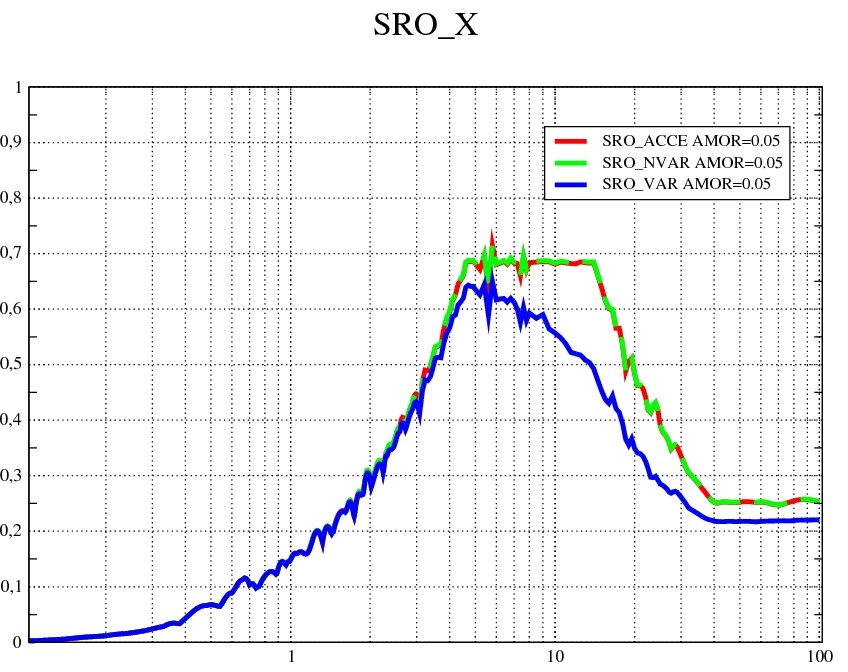
fréquence [Hz]
Remarque: Pour le cas test, le pas de temps des accélérogramme EUR a été multiplié par 2 (0.013672s au lieu de 0.006836s) afin d’accélérer les calculs. Aussi, les SRO calculés dans sdls118b, vont de \(0\) à \(50Hz\) et non de \(0\) à \(100Hz\) comme sur la figure ci-dessus .
Fonctions de cohérence de Abrahamson#
On teste les différentes fonctions de cohérence de Abrahamson disponibles dans code_aster (ABRAHAMSON, ABRA_ROCHER, ABRA_SOLMOYEN).
On considère une excitation sismique temporelle en direction “DX” donnée par un accelerogramme correspondant au spectre EUR pour un site rocheux (cf, courbe rouge de la figure ci-dessus). On fait un test de NON_REGRESSION pour les SRO obtenus avec variabilité spatiale.
Modélisation C#
Caractéristiques de la modélisation#
Les caractéristiques utilisées et le maillage sont ceux déduits des données du paragraphe 1. On a calculé la réponse harmonique et les fonctions de transfert pour les fréquences réduites \(>\) (où \(>\) ). Les résultats obtenus par Mita et Luco pour ces fréquences réduites sont présentés dans la référence [bib2].
Cette modélisation sert à tester l’option d’interface de type “ QUELCONQUE” du mot-clé MODE_INTERF avec des modes de fondation quelconques différents des modes de corps rigide. On comparera ses résultats à ceux de la modélisation A.
Caractéristiques du maillage#
Les caractéristiques sont celles de la modélisation A.
Conditions aux limites de la modélisation#
Pour la représentation du mouvement de fondation, au lieu des modes de corps rigide de translation, on utilise une base de 30 modes quelconques obtenus comme modes propres, sans conditions de blocage, sur tapis de ressorts établi à partir des impédances de sol statiques pour le sol défini en §1,2.
On prend donc comme valeurs de rigidités globales à répartir sous la fondation avec l’option RIGI_PARASOL de AFFE_CARA_ELEM :
\(>\) , \(>\) , \(>\) , \(>\)
Grandeurs testées et résultats#
Pour le cas \(>\) , on teste obligatoirement la réponse après projection sur coordonnées physiques car, à la différence de la modélisation A, les coordonnées modales ne coïncident pas avec les coordonnées physiques. La fondation étant rigide et sans masse, tous les nœuds subissent le même déplacement qui est égale à \(>\) en direction \(>\) pour une excitation en direction \(>\) . De même, tous les nœuds subissent le même déplacement qui est égale à \(>\) en direction \(>\) pour une excitation en direction \(>\) .
Avec une projection via REST_SPEC_PHYS, on obtient le résultat:
\(>\) |
SPEC N11 ‘DX’ |
SPEC N11 ‘DZ’ |
1.0 |
1.00001E+00 |
1.00383E+00 |
On effectue un test de type ANALYTIQUE avec une tolérance de \(>\) pour “DX” et \(>\) pour “DZ”.
Pour le cas avec variabilité spatiale, on choisit \(\alpha =0.5\) et on teste par rapport aux résultats de la littérature (SOURCE_EXTERNE) avec une tolérance de \(\text{10\%}\) .
Résultats obtenus avec DYNA_ISS_VARI avec une projection via REST_SPEC_PHYS, pour \(\alpha =0.5\) et :
\({a}_{0}\) |
\({A}_{11}^{11}\) |
\({A}_{33}^{33}\) |
1.0 |
0.767 |
0.770 |
2.0 |
0.437 |
0.438 |
3.0 |
0.251 |
0.252 |
Pour rappel, les résultats de référence [bib2], voir aussi §2.2:
\(>\) |
\(>\) |
\(>\) |
1.0 |
0.732 |
0.730 |
2.0 |
0.402 |
0.416 |
3.0 |
0.251 |
0.270 |
On fait par ailleurs un test de NON_REGRESSION pour les valeurs calculées par DYNA_ISS_VARI avec une tolérance de \(>\) (valeur par défaut).
On fait également un test AUTRE_ASTER par rapport aux résultats de la modélisation A.
Modélisation D#
Caractéristiques de la modélisation#
Les caractéristiques utilisées et le maillage sont ceux déduits des données du paragraphe 1. Le maillage est le même que pour la modélisation A.
Comme pour la modélisation B, on a calculé la réponse temporelle au point \(N11\) et détermine le spectre de réponse correspondant. La fonction de transfert étant égale à 1 pour le cas sans variabilité spatiale, la réponse temporelle est égale au signal d’entrée.
Si on tient compte de la variabilité spatiale, alors la réponse est modifiée.
Cette modélisation sert à tester l’option d’interface de type “ QUELCONQUE” du mot-clé MODE_INTERF avec des modes de fondation quelconques différents des modes de corps rigide. On comparera ses résultats à ceux de la modélisation B.
Caractéristiques du maillage#
Les caractéristiques sont celles de la modélisation A.
Conditions aux limites de la modélisation#
Pour la représentation du mouvement de fondation, au lieu des modes de corps rigide de translation, on utilise une base de 30 modes quelconques obtenus comme modes propres, sans conditions de blocage, sur tapis de ressorts établi à partir des impédances de sol statiques pour le sol défini en §1,2.
On prend donc comme valeurs de rigidités globales à répartir sous la fondation avec l’option RIGI_PARASOL de AFFE_CARA_ELEM :
\(KX=KY=6.36E10\) , \(KZ=8.02E10\) , \(KRX=KRY=2.07E13\) , \(KRZ=2.70E13\)
Grandeurs testées et résultats#
Fonction de cohérence de Mita&Luco#
On vérifie que, pour \(\alpha =0.0\) , la réponse en accélération est égale à l’accélérogramme en entrée du calcul (on rappelle que la fonction de transfert vaut 1 et que la fonction est rigide pour ce cas d’étude). On détermine la réponse \(q(t)\) en “DX” au point \(N11\) pour une excitation \(a(t)\) en “DX”. On traite le cas où la fonction de transfert est calculé pour tous les points (discrétisation de l’accélérogramme) et le cas où l’utilisateur renseigne FREQ_PAS, FREQ_FIN. Dans ce dernier cas, DYNA_ISS_VARI interpole des valeurs calculées pour déterminer la réponse temporelle due à l’excitation par l’accélérogramme.
On vérifie comme en 4,3,1 que le spectre de réponse oscillateur (SRO) de la réponse en accélération calculée est égal au SRO de l’accélérogramme en entrée.
type de test |
fréquence (\(Hz\) ) |
référence SRO (\(g\) ) |
tolérance (%) |
ANALYTIQUE |
10.0 |
0.6573 |
0.1 |
ANALYTIQUE |
30.0 |
0.2970 |
0.2 |
Pour le cas avec variabilité spatiale, les valeurs \(\alpha =0.7,{V}_{s}=200m/s\) ont été choisies. On considère une excitation sismique temporelle en direction “DX” donnée par un accélérogramme correspondant au spectre EUR pour un site rocheux (cf, courbe rouge de la figure en §4.3.1). Il n’y a pas de solution de référence (analytique) pour ce cas. Aussi, on fait un test de NON_REGRESSION pour les SRO obtenus avec variabilité spatiale.
On fait également un test AUTRE_ASTER par rapport aux résultats de la modélisation B.
On teste deux cas.
FREQ_FIN es t égale à la fréquence de coupure :
type de test |
fréquence (Hz) |
référence SRO (g) |
tolérance (%) |
NON_REGRESSION |
10.0 |
0.5418 |
0.0001 |
NON_REGRESSION |
30.0 |
0.2348 |
0.0002 |
AUTRE_ASTER |
10.0 |
0.535 |
1.3E0 |
AUTRE_ASTER |
30.0 |
0.2386 |
1.6E0 |
FREQ_FINest inférieure à la fréquence de coupure (\(35Hz\) au lieu de \(50Hz\) ) et on complète par zéro :
type de test |
fréquence (Hz) |
référence SRO (g) |
tolérance (%) |
NON_REGRESSION |
10.0 |
0.5418 |
0.0002 |
NON_REGRESSION |
30.0 |
0.2333 |
0.0001 |
AUTRE_ASTER |
10.0 |
0.535 |
1.2E0 |
AUTRE_ASTER |
30.0 |
0.2386 |
2.2E0 |
Fonction de cohérence de Abrahamson#
On considère une excitation sismique temporelle en direction “DX” donnée par un accélérogramme correspondant au spectre EUR pour un site rocheux (cf, courbe rouge de la figure en §4.3.1). On fait un test de NON_REGRESSION pour les SRO obtenus avec variabilité spatiale. On fait également un test AUTRE_ASTER par rapport aux résultats de la modélisation B :
type de test |
fréquence (Hz) |
référence SRO (g) |
tolérance (%) |
||
NON_REGRESSION |
10.0 |
0.5747 |
0.0001 |
||
NON_REGRESSION |
30.0 |
0.23877 |
0.0001 |
||
AUTRE_ASTER |
10.0 |
0.5723 |
0.4 |
||
AUTRE_ASTER |
30.0 |
0.23903 |
0.1 |
Modélisation E#
Caractéristiques de la modélisation#
Cette modélisation est identique à la modélisation B.
Principe#
On effectue un calcul avec DYNA_ISS_VARI en renseignant un signal différent dans chaque direction (opérandes ACCE_X, ACCE_Yet ACCE_Zde EXCIT_SOL). On lance ensuite trois autres calculs pour lesquels un seul signa est renseigné (ACCE_X, ACCE_Ypuis ACCE_Z). Les résultats sont rammenés sur base physique. On combine alors les résultats des calculs unidirectionnels à l‘aide de CREA_CHAMP et CREA_RESU. Le résultat créé constitue la référence pour le résultat avec signaux dans les trois directions.
Grandeurs testées et résultats#
Résultat de référence:
Identification |
Valeur de r éférence |
Type de référence |
Tolérance |
Champ DEPL, NœudN11, Composante DX, instant 2 |
‘NON_REGRESSION’ |
||
Champ DEPL, NœudN11, Composante DRX, instant 2 |
‘NON_REGRESSION’ |
||
Champ VITE, NœudN11, Composante DY, instant 2 |
‘NON_REGRESSION’ |
||
Champ VITE, NœudN11, Composante DRY, instant 2 |
‘NON_REGRESSION’ |
||
Champ ACCE, NœudN11, Composante DZ, instant 2 |
‘NON_REGRESSION’ |
||
Champ ACCE, NœudN11, Composante DRZ, instant 2 |
‘NON_REGRESSION’ |
Résultat tri-directionnel:
Identification |
Valeur de r éférence |
Type de référence |
Tolérance |
Champ DEPL, NœudN11, Composante DX, instant 2 |
0.00108384851924 |
‘AUTRE_ASTER’ |
1E-8 |
Champ DEPL, NœudN11, Composante DRX, instant 2 |
-9.65779984763E-07 |
‘AUTRE_ASTER’ |
1E-8 |
Champ VITE, NœudN11, Composante DY, instant 2 |
-0.00917620109214 |
‘AUTRE_ASTER’ |
1E-8 |
Champ VITE, NœudN11, Composante DRY, instant 2 |
-2.6388744608E-07 |
‘AUTRE_ASTER’ |
1E-8 |
Champ ACCE, NœudN11, Composante DZ, instant 2 |
-0.207431127511 |
‘AUTRE_ASTER’ |
1E-8 |
Champ ACCE, NœudN11, Composante DRZ, instant 2 |
-0.00037170431950 |
‘AUTRE_ASTER’ |
1E-8 |
Synthèse des résultats#
Ce cas test permet de valider la commande DYNA_ISS_VARI à travers le calcul de la réponse d’une fondation superficielle rigide représentée soit par des modes de corps rigide (MODE_INTERF=”CORP_RIGI”), soit par des modes quelconques sur tapis de ressorts déterminés à partir des impédances de sol statiques (MODE_INTERF=”QUELCONQUE”). Les résultats obtenus avec DYNA_ISS_VARI sont en bon accord avec les résultats de la référence de Mita et Luco.