u2.07.04 Condensation dynamique de modèle par sous-structuration statique#
Résumé:
Ce document décrit un mode d’utilisation de Code_Aster pour permettre le calcul transitoire par l’opérateur de dynamique transitoire non linéaire DYNA_NON_LINE sur un modèle réduit strictement à des sous-domaines non linéaires, les sous-domaines linéaires étant pris en compte une fois pour toutes par condensation dynamique au moyen de macro-éléments statiques sur les interfaces.
La méthode de condensation s’exerce sur tous les degrés de liberté d’interface communs aux sous-domaines condensés et aux sous-domaines calculés par analyse non linéaire en éléments finis. Une méthode générale complète requiert le calcul de tous les modes statiques d’interface contraints, associés chacun à une réponse à un déplacement unitaire imposé pour chaque degré de liberté d’interface. Une méthode alternative permet d’utiliser une base réduite de modes d’interface en nombre inférieur mais représentatifs des déplacements de tous les degrés de liberté d’interface, dans la gamme de fréquences escomptée.
Problème classique de condensation et principe de la méthode#
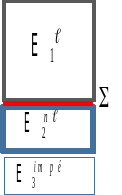
Figure 2.1: Sous-domaines du problème classique de condensation.
Sur la figure 2.1 ci-dessus sont schématisés les sous-domaines éventuels que l’on peut rencontrer dans le cadre d’un problème classique de condensation par sous-structuration statique:
les sous-domaines de type \({E}_{1}^{l}\) : sous-domaines de structure de comportement linéaire constant condensés et modélisés par macro-élément dynamique,
les sous-domaines de type \({E}_{2}^{\mathrm{nl}}\) : sous-domaines de structure de comportement potentiellement non linéaire non condensés et modélisés par des éléments finis,
les sous-domaines de type \({E}_{3}^{\mathrm{impé}}\) : sous-domaine de sol représentés par un macro-élément issu de la conversion d’une matrice complexe impédance de sol.
Le principe de base de la condensation par macro-élément consiste à partitionner pour chaque sous-domaine de type \({E}_{1}^{l}\) les degrés de liberté \(j\) de leurs interfaces notées \(\Sigma\) avec les sous-domaines de type \({E}_{2}^{\mathrm{nl}}\) ainsi que leurs autres degrés de liberté \(i\) dits «internes».
Les matrices de rigidité \([K]\) et de masse \([M]\) se décomposent ainsi sur ces degrés de liberté:
Le principe de sous-structuration statique revient pour la matrice \([K]\) par exemple à la condenser uniquement sur les degrés de liberté \(j\) des interfaces \(\Sigma\) en corrigeant le terme initial \({K}_{jj}\) d’un terme complémentaire dit «complément de Schur» selon le principe de la condensation dite de Guyan [bib3]:
Le calcul du nouveau terme \({\stackrel{ˉ}{K}}_{jj}\) revient à une projection de la matrice \([K]\) sur une base de modes statiques \(\Psi\) de type «contraint» obtenus par réponse statique à des déplacements unitaires imposés en chaque degré de liberté \(j\) des interfaces \(\Sigma\) :
La condensation sur les degrés de liberté \(j\) des interfaces \(\Sigma\) de la matrice de masse \([M]\) et des charges des sous-domaines de type \({E}_{1}^{l}\) se fera de manière analogue par le produit matriciel de la matrice et des vecteurs de chargement sur la base de modes statiques \(\Psi\) .
On constate alors que les termes \({\Psi}^{T}.[K].\Psi\) et \({\Psi}^{T}.[M].\Psi\) peuvent être directement obtenus pour chaque sous-domaine de type \({E}_{1}^{l}\) au moyen de l’opérateur de calcul d’un macro-élément dynamique MACR_ELEM_DYNA [U4.65.01] défini sur l’interface \(\Sigma\) et que les termes de charges, appliquées sur le sous-domaine de type \({E}_{1}^{l}\) , sont obtenus par projection \({\Psi}^{T}.F\) au moyen de l’opérateur PROJ_VECT_BASE [U4.63.13].
Méthodes de condensation dynamique par base complète ou réduite de mouvements sur les interfaces#
On étend la démarche précédente en incluant la condensation du comportement dynamique des sous-domaines de type \({E}_{1}^{l}\) à l’aide d’une représentation modale réduite de modes propres bloqués sur l’interface \(\Sigma\) , choisie pour être représentative de la dynamique dans une certaine gamme de fréquences.
Selon le mode de calcul des modes de représentation des mouvements des interfaces, deux méthodes de condensation sont proposées.
La méthode de calcul par base complète de mouvements à l’interface#
Le mouvement \(U\) d’un point quelconque d’un sous-domaine de type \({E}_{1}^{l}\) s’exprime à partir de la décomposition sur les modes statiques \(\Psi\) et sur un complément apporté par la partie dynamique du mouvement exprimée par des modes propres \(\Phi\) , bloqués sur l’interface \(\Sigma\) :
Avec la méthode par base complète, sur l’interface \(\Sigma\) , les modes propres \(\Phi\) ont une contribution nulle et les modes statiques \(\Psi\) ont une valeur unitaire et donc le déplacement \({U}_{\Sigma}\) d’un point de l’interface s’exprime :
Dans ce cas, les degrés de liberté physiques \({X}_{\Sigma}\) de l’interface \(\Sigma\) se confondent avec les coordonnées généralisées \({q}_{\Sigma}\) associées aux modes statiques \(\Psi\) .
En ce qui concerne les coordonnées généralisées \(q\) associées aux modes propres \(\Phi\) des sous-domaines de type \({E}_{1}^{l}\) qui sont nuls sur l’interface, leur résolution sera découplée de celle des coordonnées généralisées \({q}_{\Sigma}\) . Dans l’assemblage des matrices du problème condensé, les termes de projection sur les modes propres \({\Phi}^{T}.[K].\Phi\) et \({\Phi}^{T}.[M].\Phi\) seront juxtaposés. Pour pouvoir «mélanger» des degrés de liberté physiques avec des coordonnées généralisées, on utilise l’artifice transparent pour l’utilisateur de faire passer ces dernières pour des degrés de liberté physiques supplémentaires pris parmi les degrés de liberté internes à un sous-domaine de type \({E}_{1}^{l}\) .
Cet alias est actif dans le modèle où les domaines de type \({E}_{1}^{l}\) sont condensés par des macro-éléments, mais pour avoir le véritable déplacement des degrés de liberté internes à ces domaines, il s’obtient en post-traitement après résolution du problème global assemblé au moyen de l’opérateur REST_COND_TRAN [U4.63.33] en appliquant la relation initiale:
Il est nécessaire de retenir un nombre de modes propres \(\Phi\) multiple exact du nombre de composantes maximum du domaine condensé (\(3\) pour les éléments finis mécaniques massifs, \(6\) pour les plaques et coques, …) afin de faire correspondre exactement les coordonnées généralisées \(q\) à des composantes de nœuds supplémentaires d’interface.
Au niveau de l’assemblage des ddls d’un sous-domaine de type \({E}_{1}^{l}\) , le stockage initial représenté sur la figure 3.1-a comprend des termes à la fois sur des degrés de liberté internes et sur les degrés de liberté d’interface avec un profil de remplissage non complet.
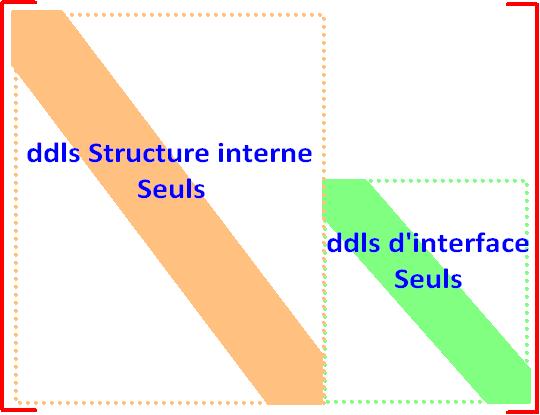
Figure 3.1-a: Assemblage initial des ddls des sous-domaines E1 avant condensation.
Après condensation par la méthode complète, la plupart des degrés de liberté internes disparaissent, mais une toute petite partie est consacrée à représenter les coordonnées généralisées associées aux modes propres et les termes du macro-élément statique s’ajoutent aux degrés de liberté d’interface avec un profil de remplissage complet cette fois-ci. Le stockage résultant est représenté sur la figure 3.1-b ci-dessous.
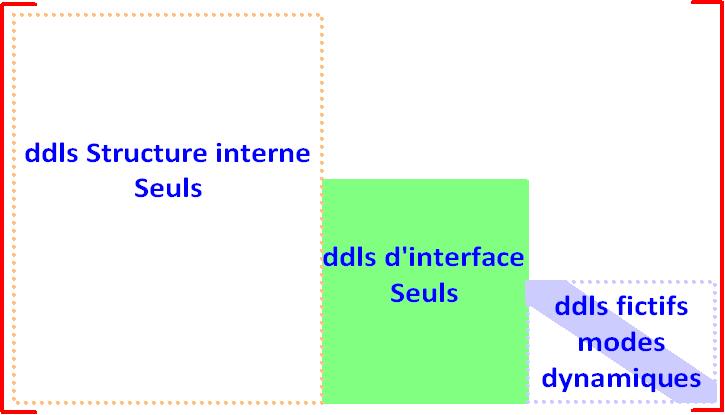
Figure 3.1-b: Assemblage des ddls des sous-domaines \({E}_{1}^{l}\) avec méthode complète.
L’assemblage des termes du macro-élément statique s’effectue par simple sommation sur les degrés de liberté d’interface et ne nécessite pas en général de liaison supplémentaire sur l’interface quand on prend en compte tous les modes statiques contraints de l’interface.
Il n’en est pas ainsi dans le cas particulier où on décide de faire une condensation sur un seul nœud d’interface où, là, il faut ajouter une relation de liaison solide sur les degrés de liberté d’interface.
Dans le cas de la présence d’un sous-domaine de type \({E}_{3}^{\mathrm{impé}}\) , le post-traitement par REST_COND_TRAN est inutile car le déplacement n’a pas de composante sur des modes dynamiques et le déplacement à l’interface est définitivement obtenu dès la résolution du problème global.
La méthode de calcul par réduction modale à l’interface#
Avec la méthode par réduction modale, le mouvement \(U\) d’un point quelconque d’un sous-domaine de type \({E}_{1}^{l}\) s’exprime toujours à partir de la décomposition sur les modes statiques \(\Psi\) et sur un complément apporté par la partie dynamique du mouvement exprimée par des modes propres \(\Phi\) :
Mais cette fois-ci, sur l’interface \(\Sigma\) , les modes propres \(\Phi\) ont une contribution non nulle car les modes statiques \(\Psi\) choisis n’ont pas une valeur unitaire sur chaque nœud et sont en nombre généralement très inférieur au nombre de degrés de liberté physiques \({X}_{\Sigma}\) de l’interface \(\Sigma\) qui, dans ce cas, ne se confondent pas avec les coordonnées généralisées \({q}_{\Sigma}\) associées aux modes statiques \(\Psi\) . Il faut donc distinguer dans l’assemblage et la résolution les termes associés aux degrés de liberté physiques et ceux associés aux coordonnées généralisées. De la même façon que pour les coordonnées généralisées \(q\) associées aux modes propres \(\Phi\) , on utilise l’artifice transparent pour l’utilisateur de faire passer les coordonnées généralisées \({q}_{\Sigma}\) associées aux modes statiques \(\Psi\) pour des degrés de liberté physiques supplémentaires pris aussi parmi des degrés de liberté internes à un sous-domaine de type \({E}_{1}^{l}\) .
Mais cette fois-ci, la résolution des degrés de liberté physiques \({X}_{\Sigma}\) de l’interface \(\Sigma\) ne sera pas découplée de celle des coordonnées généralisées \({q}_{\Sigma}\) . Dans l’assemblage des matrices du problème condensé, les termes de projection sur les modes propres \({\Phi}^{T}.[K].\Phi\) et \({\Phi}^{T}.[M].\Phi\) seront juxtaposés. Mais il faudra alors ajouter une liaison et donc des degrés de liberté de Lagrange entre les degrés de liberté physiques \({X}_{\Sigma}\) de l’interface \(\Sigma\) et les coordonnées généralisées \({q}_{\Sigma}\) . Cette liaison est exprimée par la relation:
Cette relation s’exprima par le mot clé répétable LIAISON_INTERF del’opérateur AFFE_CHAR_MECA [U4.44.01], qui permet de relier chaque sous-domaine de type \({E}_{1}^{l}\) à un sous domaine de type \({E}_{2}^{\mathrm{nl}}\) (cf. figure 2.1) en générant un cas particulier de LIAISON_DDLavec les coefficients de la relation linéaire précédente.
Ensuite, pour avoir le véritable déplacement des degrés de liberté internes aux sous-domaines de type \({E}_{1}^{l}\) , on procède de la même façon en post-traitement après résolution du problème global «mixte» au moyen de l’opérateur REST_COND_TRAN [U4.63.33] en appliquant la relation initiale:
Remarque :
Là aussi, il est nécessaire de retenir un nombre de modes propres \(\Phi\) et un nombre de modes statiques \(\Psi\) tous deux multiples exacts du nombre de composantes maximum du domaine condensé ( \(3\) pour les éléments finis mécaniques massifs, \(6\) pour les plaques et coques, …) afin de faire correspondre exactement les coordonnées généralisées à des composantes de nœuds supplémentaires d’interface.
Après condensation par la méthode de réduction modale, la plupart des degrés de liberté internes disparaissent, mais une toute petite partie est consacrée pour représenter les coordonnées généralisées associées aux modes propres, une autre petite partie est consacrée aux coordonnées généralisées associées aux modes propres d’interface. Cette fois-ci, les termes du macro-élément statique ne s’ajoutent pas aux degrés de liberté d’interface qui conservent alors un profil de remplissage non complet. Mais on obtient alors un bloc quadrangulaire de degrés de liberté de Lagrange entre les degrés de liberté physiques \({X}_{\Sigma}\) de l’interface \(\Sigma\) et les coordonnées généralisées \({q}_{\Sigma}\) .
Le stockage résultant est représenté sur la figure 3.2 ci-dessous.
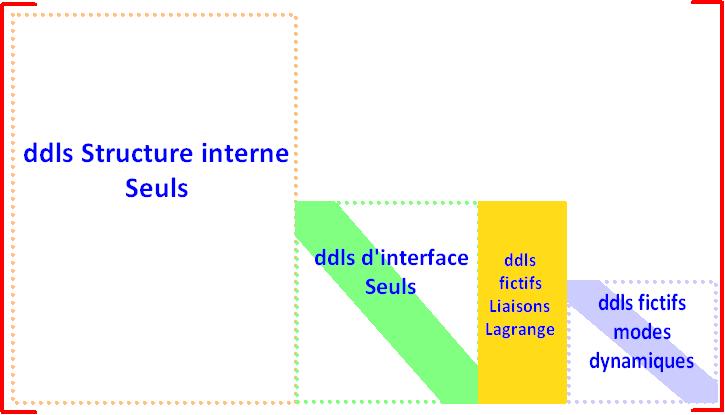
Figure 3.2: Stockage des ddls des sous-domaines \({E}_{1}^{l}\) avec méthode de réduction modale.
On remarquera qu’il n’y a pas de choix de calcul imposé pour la base de réduction de modes statiques d’interface \(\Psi\) . Un choix possible sera celui utilisé en interaction sol-structure [bib4] en considérant la restriction à l’interface \(\Sigma\) d’une base de modes propres du sous-domaine de type \({E}_{1}^{l}\) sur tapis de ressorts représentatifs de la rigidité des sous-domaines adjacents de type \({E}_{2}^{\mathrm{nl}}\) ou \({E}_{3}^{\mathrm{impé}}\) , cf. [U2.06.07, §11,5].
Validation de l’utilisation des méthodes de condensation dynamique#
Une bonne approche de validation du modèle de condensation dynamique – avant de réaliser l’analyse non linéaire – consiste en la comparaison de l’analyse modale sur les premiers modes entre le modèle initial complet non réduit, contenant tous les sous-domaines, et le modèle réduit «mixte» final contenant les sous-domaines condensés sous forme de macro-éléments dynamiques ainsi que le modèle de sous-domaines de type \({E}_{2}^{\mathrm{nl}}\) traités en linéaire.
Intérêts respectifs d’utilisation des méthodes de condensation dynamique#
La méthode de condensation dynamique permet en général, par rapport au modèle non condensé, de réduire la taille des systèmes matriciels, du nombre total de degrés de liberté et d’obtenir des gains en terme de mémoire et performances pour la factorisation et la résolution.
Pour la méthode complète, du fait du stockage plein des termes des modes d’interface, cette méthode présente de l’intérêt dans les opérations de factorisation surtout si le nombre de degrés de liberté d’interface ne dépasse guère \(1/10\) du nombre total de degrés de liberté avant condensation.
Par contre, cette méthode nécessite le calcul des modes d’interface pour tous les degrés de liberté et peut être rédhibitoire en mémoire pour ce calcul si le nombre total de degrés de liberté avant condensation est supérieur à 100000 et si le nombre de modes d’interface est de l’ordre de 10000.
La méthode de condensation avec réduction modale présente alors un intérêt on réduit le nombre de modes d’interface à moins de \(1/10\) du nombre de degrés de liberté d’interface, soit moins de 1000.
Tout en sachant qu’en termes de performances :
on ajoute des équations liées aux degrés de liberté de Lagrange relatifs aux relations entre les degrés de liberté et les modes réduits d’interface, ce qui risque de pénaliser la résolution,
on obtient un gain sur la factorisation du système car sa taille va diminuer ainsi que sur la restitution sur base physique de chaque sous-domaine dans le rapport du nombre de degrés de liberté sur le nombre de modes réduits d’interface.
La méthode complète semble performante et suffisante pour un nombre total de degrés de liberté avant condensation compris entre environ 5000 et 50000. La méthode avec réduction modale devient intéressante au-delà de 50000 degrés de liberté avant condensation.
Synthèse du calcul du modèle réduit « mixte » avec condensation dynamique#
Le calcul avec condensation dynamique nécessite de passer par les étapes suivantes d’enchaînement des commandes de Code_Aster:
Instructions classiques initiales: définition du maillage en éléments finis complet de toute la structure et des groupes de mailles, notamment les groupes de mailles et de nœuds des interfaces \(\Sigma\) , et du sous-domaine de type \({E}_{2}^{\mathrm{nl}}\) , définition des matériaux, affectation des matériaux aux groupes de mailles.
Et pour chaque sous-domaine de type \({E}_{1}^{l}\) qui sera condensé:
Définition du modèle et affectation des éléments finis au modèle, affectation des matériaux aux éléments, affectation des caractéristiques élémentaires,
Calcul des modes propres sur base bloquée sur l’interface \(\Sigma\) par la commande CALC_MODES [U4.52.02], avec les conditions aux limites d’origine de ce sous-domaine,
Définition de l’interface dynamique de type CRAIGB sur le groupe de nœuds de l’interface \(\Sigma\) par la commande DEFI_INTERF_DYNA [U4.64.01],
Calcul des modes statiques de l’interface dynamique précédemment définie avec MODE_STATIQUE [U4.52.14] dans le cas du choix d’une base complète ou par CALC_MODES dans le cas du choix d’une base réduite, avec les conditions idoines,
Définition d’une base modale par la commande DEFI_BASE_MODALE[U4.64.02] avec option RITZen intégrant les modes statiques de l’interface dynamique précédemment définie pour compléter la base des modes propres sur l’interface (mots-clés MODE_INTF et INTERF_DYNA pour désigner l’interface dynamique),
Calcul des vecteurs assemblés de chargement (forces, déplacements imposés…) du sous-domaine de type \({E}_{1}^{l}\) et projection de ceux-ci sur la base complète de RITZ, avec la numérotation des degrés de liberté associée,
Assemblage du macro-élément dynamique de sous-domaine de type \({E}_{1}^{l}\) sur l’interface \(\Sigma\) par la commande MACR_ELEM_DYNA [U4.65.01], à partir de la base de RITZ précédemment définie en y intégrant les vecteurs de charge projetée, ou d’un macro-élément dynamique de sous-domaine de type \({E}_{3}^{\mathrm{impé}}\) en convertissant une impédance de sol sur l’interface \(\Sigma\) , cf. la commande LIRE_IMPE_MISS [U7.02.32] et le mot-clé MATR_IMPE de la commande MACR_ELEM_DYNA [U4.65.01].
Ensuite, pour l’analyse dynamique du modèle réduit «mixte» avec les sous-domaines non linéaires:
Définition et assemblage au maillage initial par DEFI_MAILLAGE[U4.23.01] et ASSE_MAILLAGE[U4.23.03] de super-mailles correspondant chacune à un macro-élément dynamique du sous-domaine de type \({E}_{1}^{l}\) pour créer un nouveau maillage réduit «mixte». Les nœuds de ces super-mailles vont porter les degrés de liberté du sous-domaine condensé,
Définition d’un modèle réduit «mixte» affecté au nouveau maillage réduit «mixte» intégrant le sous-domaine non condensé en éléments finis de type \({E}_{2}^{\mathrm{nl}}\) ainsi que les affectations des super-mailles par le mot clé AFFE_SOUS_STRUC de l’opérateur AFFE_MODELE [U4.41.01],
Définition des charges spécifiques du modèle par les mots clés LIAISON_SOLIDE ou LIAISON_INTERF de l’opérateur AFFE_CHAR_MECA [U4.44.01],
Appel à l’opérateur de calcul non linéaire STAT_NON_LINE [U4.51.03] ou DYNA_NON_LINE [U4.53.01] sur le modèle réduit «mixte» en incluant le champ matériau défini sur le sous-domaine de type \({E}_{2}^{\mathrm{nl}}\) affecté au maillage réduit «mixte», les charges spécifiques précédentes par le mot clé EXCIT ainsi que les vecteurs de chargement définis sur les sous-domaines qui ont été condensés et projetés sur les macro-éléments, via le mot clé SOUS_STRUC,
Enfin, on peut valider le modèle réduit «mixte» final, sous hypothèse entièrement linéaire, contenant les sous-domaines condensés sous forme de macro-éléments par comparaison de fréquences propres avec l’analyse modale sur les premiers modes du modèle initial complet non réduit, contenant tous les sous-domaines, en utilisant le mot-clé MODE_VIBR de l’opérateur DYNA_NON_LINE.
Puis pour chaque sous-domaine de type \({E}_{1}^{l}\) hors ceux d’une impédance de sol :
Restitution en base physique sur le modèle du sous-domaine sur lequel a été bâti le macro-élément du sous-domaine par l’opérateur REST_COND_TRAN [U4.63.33].
Les fichiers de commandes miss06b.comm et sdnv107b.commillustrent ce type de calcul.
Bibliographie#
O.NICOLAS: Spécification du développement de la traduction MACR_ELEM_STAT / MACR_ELEM_DYNA. Compte rendu EDF/AMA-05.149.
G.DEVESA: Application de méthodes de condensation modale dans les opérateurs de calcul dynamique non linéaire utilisés pour l’étude du benchmark EUROPLEXUS – Code_Aster en explicite. Compte rendu EDF/AMA-07-165.
Document Aster [U2.07.02]:Notice d’utilisation de la sous-structuration statique.
Document Aster [U2.06.07]: Interaction sol-structure en analyse sismique avec l’interface Code_Aster - ProMISS3D.
Document Aster [R4.06.02]: Calcul modal par sous-structuration dynamique classique.