u4.44.21 Opérateur DEFI_OBSTACLE#
Syntaxe#
Détail de la syntaxe
table_fonction = DEFI_OBSTACLE(
◇ TYPE = / "CERCLE" (par défaut),
/ "PLAN_Y",
/ "PLAN_Z",
/ "DISCRET",
/ "BI_CERCLE",
/ "BI_PLAN_Y",
/ "BI_PLAN_Z",
/ "BI_CERC_INT",
◇ VALE = float,
◇ VERIF = text (défaut: "FERME"),
)
◆ : obligatoire
◇ : optionnel
⟐ : présent par défaut
& : ensemble
/ : un seul parmi
| : plusieurs choix possibles
Opérandes#
Opérande TYPE#
L’opérande TYPE permet de donner la forme enveloppe du jeu dans la liaison de choc par un texte parmi les suivants: PLAN_Y, PLAN_Z, CERCLE, DISCRET, BI_PLAN_Y, BI_PLAN_Z, BI_CERCLE et BI_CERC_INT;
Les obstacles de type PLAN_Y, PLAN_Z, CERCLE et DISCRET définissent la géométrie des lieux de choc entre une structure mobile et un obstacle indéformable. Elles sont tracées ci‑dessous [Figure 3.1-a] en fonction du type choisi.

Figure 3.1-a
La valeur du jeu et le repère local \((\mathit{Xloc},\mathit{Yloc},\mathit{Zloc})\) seront définis au moment de l’utilisation de l’obstacle (voir opérateur DYNA_TRAN_MODAL [U4.53.21]). L’origine de ce repère étant le lieu de la structure filaire considérée.
Dans le cas de l’obstacle TYPE = ‘DISCRET’, il faut préciser la courbe définissant le contour et le jeu simultanément, à l’aide du mot clé VALE.
Les types BI_PLAN_Y, BI_PLAN_Z,BI_CERCLE et BI_CERC_INT permettent de définir les lieux de contact possibles de la structure filaire entre deux nœuds \(\mathit{NO1}\) et \(\mathit{NO2}\) appartenant chacun à une structure mobile. Les géométries des liaisons de contact plan sur plan (ou cercle sur cercle) sont décrites sur la figure [Figure 3.1-b] ci-dessous.

Figure 3.1-b
La valeur des épaisseurs de matière entourant les nœuds de choc (\(\mathit{D1}\) et \(\mathit{D2}\) pour un obstacle de type BI_PLAN_* , \(\mathit{R1}\) et \(\mathit{R2}\) pour un obstacle de type BI_CERCLE ou BI_CERC_INT) ainsi que le repère local \((\mathit{Xloc},\mathit{Yloc},\mathit{Zloc})\) sont définis au moment de l’utilisation de l’obstacle, c’est‑à-dire dans l’opérateur DYNA_TRAN_MODAL [U4.53.21].
Plusieurs formes initiales, en particulier pour l’étude des vibrations des grappes de commande, sont définies. Elles correspondent au crayon des différentes grappes de commande et à leurs guidages.
Opérandes VALE/VERIF#
◊ VALE = thetar
Dans le cas de l’obstacle DISCRET il faut préciser la courbe définissant le contour et le jeu simultanément, à l’aide du mot clé VALE.
thetar est la liste de réels permettant de décrire le contour de l’obstacle de type DISCRET en coordonnées polaires. On décrit l’obstacle comme une courbe plane en polaire en donnant des couples de valeurs, la première étant l’angle en degrés de 0 à 360°, la seconde le rayon [Figure3.2-a]. En définissant l’obstacle, il faut considérer que l’axe des y correspond à un angle de 0°.
VALE = ( 0.0, 0.00086,
30.0, 0.001, 90.0, 0.001, 150.0, 0.001, 210.0, 0.001, 270.0, 0.001, 330.0, 0.001, 360.0, 0.00086,)
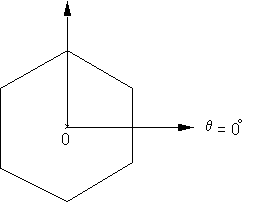
Figure 3.2-a
◊ VERIF= “FERME”
Mot clé permettant de vérifier si la courbe donnée en polaire est bien fermée.