v6.08.114 SSND114 – Loi de comportement pour des jonctionsélastoplastiques endommageables en flexion avec des éléments discrets#
Résumé:
On teste la réponse du modèle de comportement qui permet de modéliser une jonction en flexion entre un voile et un plancher ou un radier, accessible par le mot-clé JONC_ENDO_PLAS, cf. [R5.03.17], formulé sur des éléments discrets sur des mailles SEG2.
On teste tout d’abord le comportement avec l’opérateur STAT_NON_LINE. Les valeurs de référence sont numériques et obtenues par une méthode indépendante: on teste la réponse sur des cycles rotation-moment.
Puis, on teste…
Solution de référence#
Méthode de calcul utilisée pour la solution de référence#
Modélisation A#
Les équations régissant le comportement sont des équations différentielles non linéaires. Pour valider la réponse obtenue avec Code_Aster en statique non linéaire les valeurs obtenues sont comparées aux valeurs analytiques.
Résultats de référence#
La comparaison est réalisée sur lesmoments (“MZ”) obtenus en fonction des rotations “DRZ” imposées pour les différents éléments et les chargements appliqués, avec un pas de temps de calcul de \(1.0s\) . Les instants sont en \(s\) et les moments en \(N.m\) .
Les courbes ci-dessous permettent de vérifier que les passages des seuils et changements de pente sont bien détectés et pris en compte même avec un pas de temps de calcul très grossier.
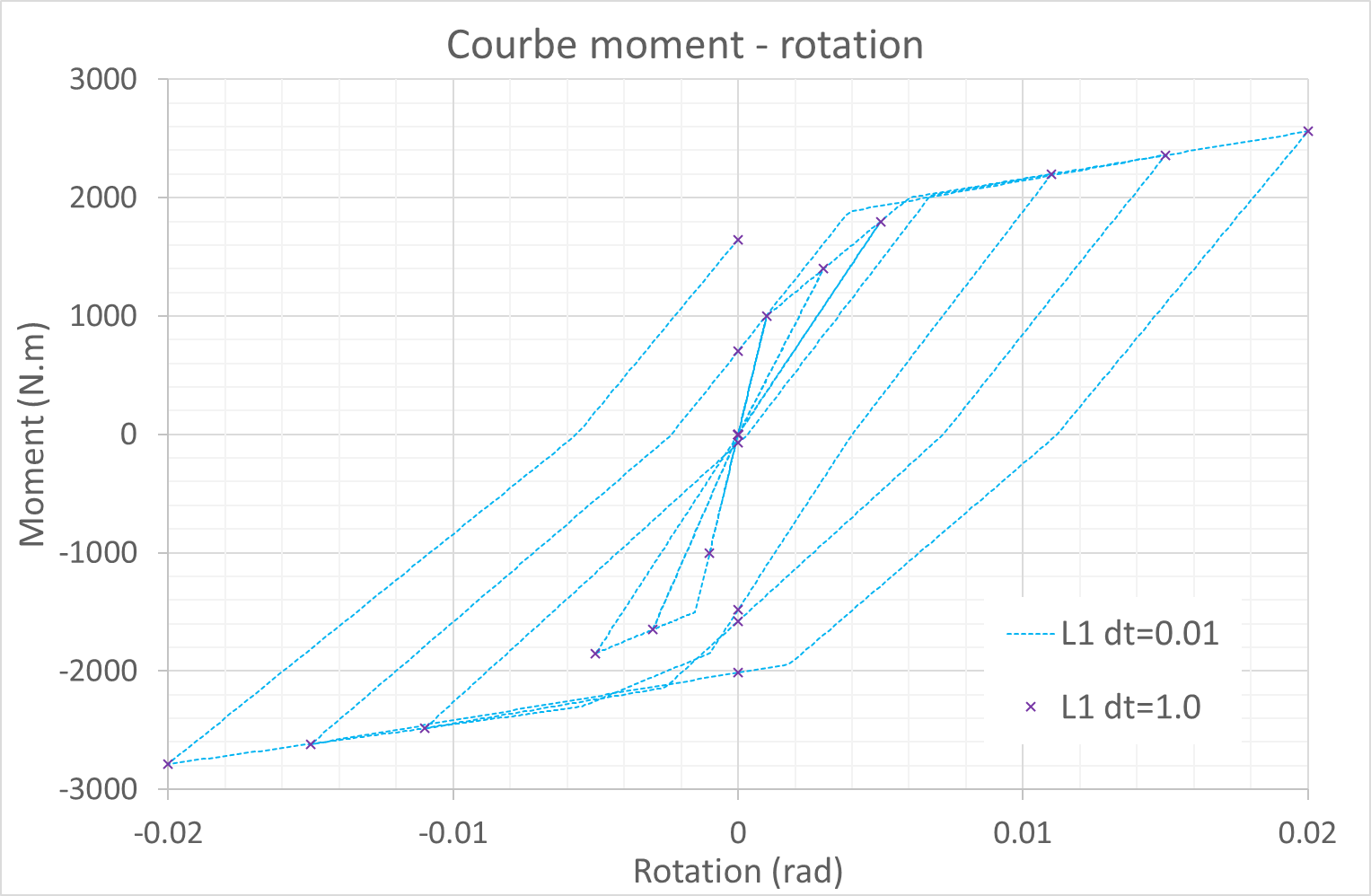
Figure 2.2-a : Courbe Moment-rotation, élément 1.
La réponse donnée par Code_Aster est testée pour les valeurs suivantes:
Tableau 2.2-a : rotationset moments, élément 1.
Instant |
rotation \({\theta}_{z}\) |
Moment \({M}_{z}\) |
1.0000000000E+00 |
1.0000000000E+03 |
1.0000000000E-03 |
3.0000000000E+00 |
-1.0000000000E+03 |
-1.0000000000E-03 |
5.0000000000E+00 |
1.4000156777E+03 |
3.0000000000E-03 |
7.0000000000E+00 |
-1.6500032505E+03 |
-3.0000000000E-03 |
9.0000000000E+00 |
1.8000256320E+03 |
5.0000000000E-03 |
1.1000000000E+01 |
-1.8500108811E+03 |
-5.0000000000E-03 |
1.3000000000E+01 |
2.2000192257E+03 |
1.1000000000E-02 |
1.5000000000E+01 |
-2.4833453804E+03 |
-1.1000000000E-02 |
1.7000000000E+01 |
2.3601391920E+03 |
1.5000000000E-02 |
1.9000000000E+01 |
-2.6166696872E+03 |
-1.5000000000E-02 |
2.1000000000E+01 |
2.5600393177E+03 |
2.0000000000E-02 |
2.3000000000E+01 |
-2.7833327927E+03 |
-2.0000000000E-02 |
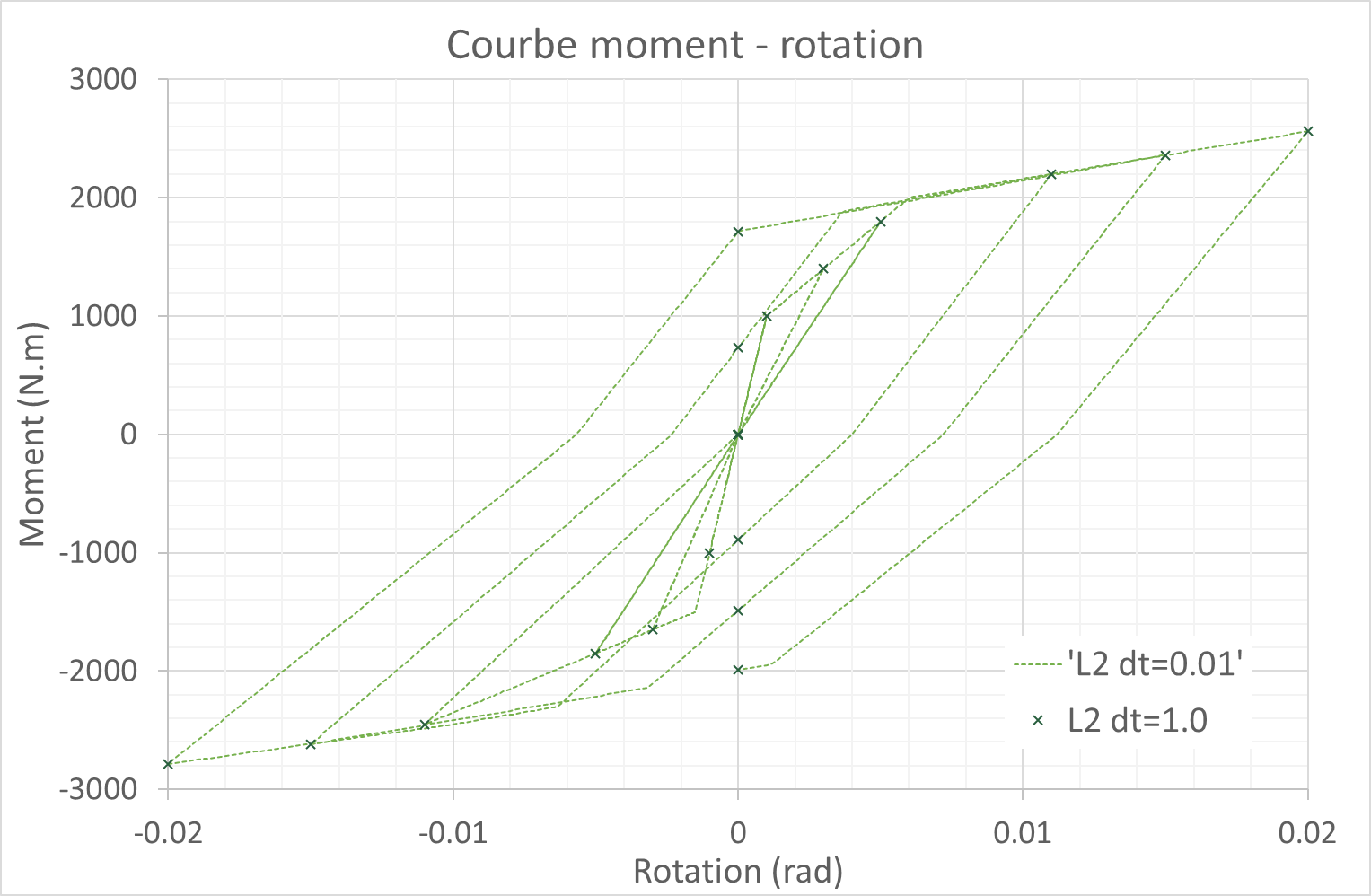
Figure 2.2-b : Courbe Moment-rotation, élément 2.
La réponse donnée par Code_Aster est testée pour les valeurs suivantes:
Tableau 2.2-b : rotationset moments, élément 2.
Instant |
rotation \({\theta}_{z}\) |
Moment \({M}_{z}\) |
1.0000000000E+00 |
-1.0000000000E+03 |
-1.0000000000E-03 |
3.0000000000E+00 |
1.0000000000E+03 |
1.0000000000E-03 |
5.0000000000E+00 |
-1.6500000701E+03 |
-3.0000000000E-03 |
7.0000000000E+00 |
1.4000143913E+03 |
3.0000000000E-03 |
9.0000000000E+00 |
-1.8500245881E+03 |
-5.0000000000E-03 |
1.1000000000E+01 |
1.8000013063E+03 |
5.0000000000E-03 |
1.3000000000E+01 |
-2.4500169230E+03 |
-1.1000000000E-02 |
1.5000000000E+01 |
2.2000156060E+03 |
1.1000000000E-02 |
1.7000000000E+01 |
-2.6166668190E+03 |
-1.5000000000E-02 |
1.9000000000E+01 |
2.3601185361E+03 |
1.5000000000E-02 |
2.1000000000E+01 |
-2.7833347518E+03 |
-2.0000000000E-02 |
2.3000000000E+01 |
2.5600383030E+03 |
2.0000000000E-02 |
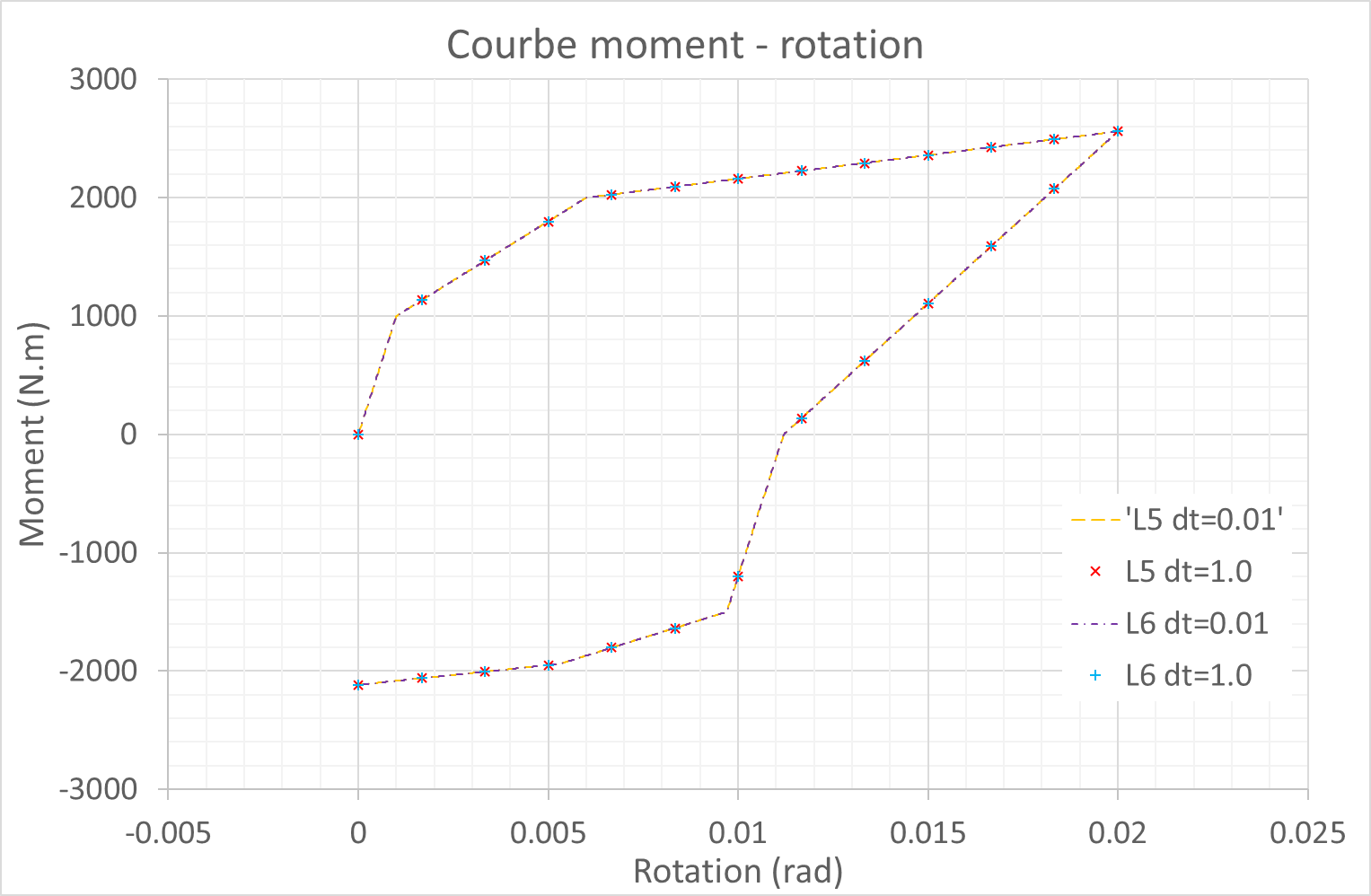
Figure 2.2-c : Courbe Moment-rotation, éléments5 et 6.
Tableau 2.2-c : rotationset moments, éléments5 et 6.
Instant |
rotation \({\theta}_{z}\) |
Moment \({M}_{z}\) |
3.0000000000E+00 |
1.8000004556E+03 |
5.0000000000E-03 |
6.0000000000E+00 |
2.1600162134E+03 |
1.0000000000E-02 |
9.0000000000E+00 |
2.3600225066E+03 |
1.5000000000E-02 |
1.2000000000E+01 |
2.5599993245E+03 |
2.0000000000E-02 |
1.5000000000E+01 |
1.1054534813E+03 |
1.5000000000E-02 |
1.8000000000E+01 |
-1.2000046711E+03 |
1.0000000000E-02 |
2.1000000000E+01 |
-1.9499993974E+03 |
5.0000000000E-03 |
Tableau 2.2-d : rotationset moments, élément 3.
Instant |
rotation \({\theta}_{z}\) |
Moment \({M}_{z}\) |
1.0000000000E+00 |
1.1904121201E+03 |
1.1545287124E-03 |
3.0000000000E+00 |
-1.3331111483E+03 |
-1.1545081204E-03 |
5.0000000000E+00 |
1.7237265601E+03 |
3.4638528074E-03 |
7.0000000000E+00 |
-1.9588403006E+03 |
-3.4638188809E-03 |
9.0000000000E+00 |
2.2570514348E+03 |
5.7731769015E-03 |
1.1000000000E+01 |
-2.2255575302E+03 |
-5.7731814447E-03 |
1.3000000000E+01 |
2.6190094112E+03 |
1.2701327870E-02 |
1.5000000000E+01 |
-2.9330146633E+03 |
-1.2701282573E-02 |
1.7000000000E+01 |
2.8324211293E+03 |
1.7320099228E-02 |
1.9000000000E+01 |
-3.1107779579E+03 |
-1.7320059070E-02 |
2.1000000000E+01 |
3.0989885500E+03 |
2.3093563448E-02 |
2.3000000000E+01 |
-3.3330038571E+03 |
-2.3093529688E-02 |
Tableau 2.2-e : rotationset moments, élément 4.
Instant |
rotation \({\theta}_{z}\) |
Moment \({M}_{z}\) |
1.0000000000E+00 |
-1.3331111481E+03 |
-1.1545081204E-03 |
3.0000000000E+00 |
1.1904121201E+03 |
1.1545287124E-03 |
5.0000000000E+00 |
-1.9588485809E+03 |
-3.4638188656E-03 |
7.0000000000E+00 |
1.7237108264E+03 |
3.4638528189E-03 |
9.0000000000E+00 |
-2.2255289211E+03 |
-5.7731814457E-03 |
1.1000000000E+01 |
2.2570794615E+03 |
5.7731768999E-03 |
1.3000000000E+01 |
-2.9330774561E+03 |
-1.2701282533E-02 |
1.5000000000E+01 |
2.6190179987E+03 |
1.2701327871E-02 |
1.7000000000E+01 |
-3.1108083764E+03 |
-1.7320059051E-02 |
1.9000000000E+01 |
2.8325478530E+03 |
1.7320099228E-02 |
2.1000000000E+01 |
-3.3330092804E+03 |
-2.3093529684E-02 |
2.3000000000E+01 |
3.0989396258E+03 |
2.3093563476E-02 |
Tableau 2.2-f : rotationset moments, élément 7.
Instant |
rotation \({\theta}_{z}\) |
Moment \({M}_{z}\) |
3.0000000000E+00 |
2.2570241105E+03 |
5.7731769185E-03 |
6.0000000000E+00 |
2.5656146751E+03 |
1.1546635072E-02 |
9.0000000000E+00 |
2.8326866571E+03 |
1.7320099213E-02 |
1.2000000000E+01 |
3.0989736939E+03 |
2.3093563449E-02 |
1.5000000000E+01 |
1.1994330950E+03 |
1.7320334952E-02 |
1.8000000000E+01 |
-1.8045529425E+03 |
1.1547265855E-02 |
2.1000000000E+01 |
-2.2218840472E+03 |
5.7738233936E-03 |
Tableau 2.2-g : rotationset moments, élément 8.
Instant |
rotation \({\theta}_{z}\) |
Moment \({M}_{z}\) |
3.0000000000E+00 |
4.6662898355E+06 |
3.0801270189E-03 |
6.0000000000E+00 |
9.3318646247E+06 |
6.1602540378E-03 |
9.0000000000E+00 |
1.3997034885E+07 |
9.2403810568E-03 |
1.2000000000E+01 |
1.8662205044E+07 |
1.2320508076E-02 |
1.5000000000E+01 |
1.3996314269E+07 |
9.2403810568E-03 |
1.8000000000E+01 |
9.3304234944E+06 |
6.1602540378E-03 |
2.1000000000E+01 |
4.6637232079E+06 |
3.0801270189E-03 |
Incertitude sur la solution#
Modélisation A#
La solution de référence est obtenue par intégration numérique d’un système différentiel non linéaire.
Modélisation A#
Caractéristiques de la modélisation#
Lamodélisation testée comprend 8éléments DIS_TRsur des mailles SEG2. Les caractéristiques de raideur des éléments discrets, qui servent pour la prédiction de l’algorithme non linéaire, sont donc du type: K_TR_D_L.
Caractéristiques du maillage#
Nombre de nœuds: 16, nombre de mailles SEG2: 8, éléments DIS_TR: 8. Se reporter à § 1.2.1 .
Conditions aux limites et chargements#
Se reporter à § 1.4 .
Discrétisation en temps#
Le pas de temps et l’intervalle de temps d’analyse sont:
\(\Delta t=1,0{10}^{-2}\phantom{\rule{2em}{0ex}}s\) et \(t\in [:ref:`0s,24s <0s,24s>\)]`
Grandeurs testées et résultats#
Les grandeurs testées sont les rotations, et les moments. Les valeurs sont celles présentées à § 2.2 .
Les tolérances sont celles par défaut.
Synthèse des résultats#
Ces tests permettent de vérifier le bon fonctionnement des éléments discrets \(\mathrm{3D}\) avec le comportement JONC_ENDO_PLAS dans le cadre de l’utilisation de STAT_NON_LINE et de DYNA_NON_LINE.