v6.04.195 SSNV195 - Barreau en multi-fissuration avec X-FEM#
Résumé
Ce test a pour but de tester et valider les fonctionnalités de la méthode X-FEM dans le cas des structures \(\mathrm{2D}\) et \(\mathrm{3D}\) multi-fissurées. Globalement il s’agit de refaire les essentiels des tests SSNV173 [V6.04.173] et SSNV182 [V6.04.182] pour une structure multi-fissurée cette fois-ci.
Ce test met en jeu un barreau parallélépipédique, dont la section médiane est encastrée, présentant deux fissures le traversant complètement (on parlera alors d’interfaces), placées symétriquement d’un côte et de l’autre de la section encastrée. Le barreau est soumis à des déplacements imposés, ce qui a pour conséquence l’ouverture totale des interfaces et la séparation de la structure en trois parties lorsque elle est sollicitée en traction, ou l’apparition de pression de contact lorsque la sollicitation est de compression.
Deux types d’interfaces sont considérés, horizontales (un seul étage d’éléments est coupé) et inclinées (plusieurs étages d’éléments sont coupés, afin de tester le bonne gestion du sous-découpage des éléments lors de la présence de plusieurs fissures dans la structure.
Le cas d’une plaque \(\mathrm{2D}\) présentant deux interfaces est également étudié.
Modélisation A : Interfaces horizontales ouvrantes#
Caractéristiques du maillage#
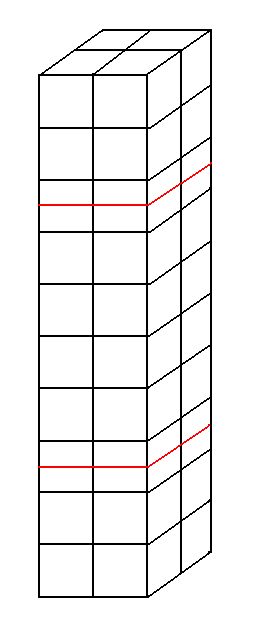
Figure 2.1-1: Le maillage de la modélisation A
On discrétise la structure à l’aide des éléments finis HEXA8. Suivant les trois directions du système de référence choisi, on a \(2\times 2\times 10\) éléments donc un total de 40 éléments finis (voir [])
Le nombre d’étages d’éléments suivant la direction \(Z\) a été choisi pour éviter l’enrichissement d’un même élément par les deux interfaces. En effet, dans l’implémentation de la multi-fissuration (voir manuel) on évite d’approcher deux fissures à moins de 4 éléments sains afin d’éviter les conflits lors de la gestion des degrés de liberté enrichis.
Ainsi, en choisissant 10 étages, on pourra à la fois imposer des conditions aux limites sur les mailles extrêmes de la manière habituelle et éviter que les enrichissements caractéristiques de la X-FEM se touchent. La première interface sera introduite au milieu du troisième étage tandis que la deuxième au milieu du huitième.
Conditions aux limites#
Afin d’ouvrir les deux interfaces et pour empêcher les mouvements de corps rigide, on encastre les nœuds appartenant à la surface médiane :
GROUP_NO=SURFMED : DX = 0, DY = 0 et DZ = 0
Pour les nœuds appartenant aux surfaces extrêmes (inférieure et supérieure) on impose des déplacements comme suit :
GROUP_NO=SURFINF: DX = 0, DY = 0 et DZ = -DEPZ
GROUP_NO=SURFSUP: DX = 0, DY = 0 et DZ = DEPZ
La valeur du déplacement imposé est \(\mathit{DEPZ}=3.{10}^{-3}m\) . On pourra en fait déplacer les deux blocs extrêmes du barreau suivant les trois directions par simple affectation d’une valeur non nulle pour les degrés de liberté correspondants à \(\mathit{DX}\) ou \(\mathit{DY}\) .
Résolution analytique#
La solution d’un tel problème est bien sûr évidente. Comme expliqué pour le cas test SSNV173 [V6.04.173], la solution est la suivante: tous les déplacements suivant \(x\) et \(y\) sont nuls, tous les déplacements suivant \(z\) en dessous de la level-set inférieure sont égaux au déplacement imposé \({u}_{z}\) à la base de la structure, tous les déplacements suivant \(z\) entre les deux level-set sont nuls et tous les déplacements suivant \(z\) au dessus de la level set supérieure sont égaux au déplacement imposé \({u}_{z}\) au sommet de la structure.
Grandeurs testées et résultats#
On teste les valeurs du déplacement après la convergence des itérations de l’opérateur STAT_NON_LINE. On vérifie que l’on retrouve bien les valeurs déterminées au [§ 2.3 ].
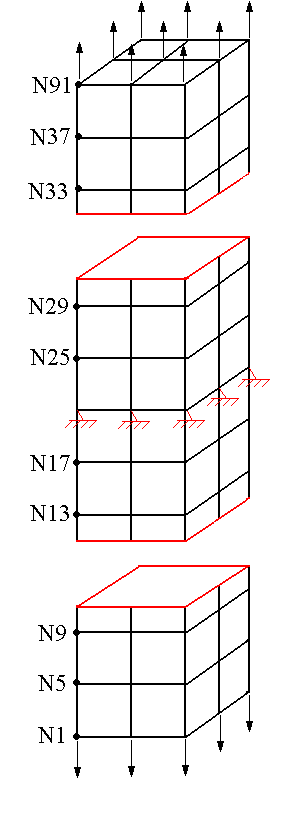
Figure 2.4-1: Maillage final et positionnement des nœuds testés
Identification |
Référence |
Tolérance |
DXpour tous les nœuds juste en dessous de l’interface inférieure |
0.00 |
1.0E-15 |
DXpour tous les nœuds juste au dessus de l’interface inférieure |
0.00 |
1.0E-15 |
DYpour tous les nœuds juste en dessous de l’interface inférieure |
0.00 |
1.0E-15 |
DYpour tous les nœuds juste au dessus de l’interface inférieure |
0.00 |
1.0E-15 |
DZpour tous les nœuds juste en dessous de l’interface inférieure |
-3.E-3 |
1.0E-09% |
DZ pour tous les nœuds juste au dessus de l’interface inférieure |
0.00 |
1.0E-15 |
DXpour tous les nœuds juste en dessous de l’interface supérieure |
0.00 |
1.0E-15 |
DXpour tous les nœuds juste au dessus de l’interface supérieure |
0.00 |
1.0E-15 |
DYpour tous les nœuds juste en dessous de l’interface supérieure |
0.00 |
1.0E-15 |
DYpour tous les nœuds juste au dessus de l’interface supérieure |
0.00 |
1.0E-15 |
DZpour tous les nœuds juste en dessous de l’interface supérieure |
0.00 |
1.0E-15 |
DZpour tous les nœuds juste au dessus de l’interface supérieure |
3.E-3 |
1.0E-09% |
Pour tester tous les nœuds en une seule fois, on teste le minimum et le maximum de la colonne.
Remarques#
On remarque que les valeurs des degrés de liberté testés sont celles attendues, les interfaces s’ouvrent séparant ainsi le barreau en trois parties. Le résultat est visualisé à l’aide des opérateurs de post-traitement.
Modélisation B : Interfaces horizontales en fermeture#
Caractéristiques du maillage et de l’interface#
Le maillage est le même que celui de la modélisation A. L’objectif étant de tester la gestion du contact sur les interfaces représentées avec X-FEM, seules les conditions aux limites ont changé.
Conditions aux limites#
Les conditions aux limites vont permettre cette fois-ci de tester la prise en compte du contact sans frottement sur les lèvres des interfaces. On garde donc l’encastrement des nœuds appartenant à la surface médiane mais les déplacements imposés aux nœuds des deux extrêmes (inférieure et supérieure) vont refermer les interfaces. On aura donc :
GROUP_NO=SURFMED: DX = 0, DY = 0 et DZ = 0
GROUP_NO=SURFINF: DX = 0, DY = 0 et DZ = DEPZ
GROUP_NO=SURFSUP: DX = 0, DY = 0 et DZ = -DEPZ
Résolution analytique#
Les interfaces étant horizontales et l’état de compression uniaxial et normal à l’interface, il n’y a pas de glissement possible. On vérifie la valeur de la pression de contact et la solution du problème est celle du même problème sans interface, pour chacun des blocs d’un côté et de l’autre de la surface encastrée. Comme montré pour le cas test SSNV182 [V6.04.182] et compte tenu de la géométrie et des conditions aux limites décrites au §2.2, la pression de contact est donnée par :
\(\lambda =E\frac{\text{DEPZ}}{\text{LZ}/2}\) éq 4.3-1
Avec les valeurs numériques précédemment introduites, \(\lambda =-12{.10}^{3}\text{Pa}\) .
Grandeurs testées et résultats#
Le bon déroulement du calcul permet a priori de valider la bonne gestion du contact pour la multi fissuration. Les composantes des SD FISS_XFEM concernant le contact pour chaque fissure sont gérées correctement au niveau des opérateurs MODI_MODELE_XFEM et STAT_NON_LINE. On teste les valeurs de la pression de contact pour les nœuds milieu appartenant aux éléments coupés par les fissures.
Identification |
Référence |
LAGS_Cpour tous les nœuds des deux fissures |
-1.2E4 |
LAGS_F1pour tous les nœuds des deux fissures |
0.00 |
LAGS_F2pour tous les nœuds des deux fissures |
0.00 |
Modélisation C – Interfaces inclinées#
Cette modélisation a pour but de prouver la prise en compte du contact frottant pour des interfaces inclinées ainsi que le bon fonctionnement des algorithmes de découpage et de post-traitement.
On a choisi un angle d’inclinaison \(\theta =30°\) suivant la rotation autour de l’axe \(\mathit{OX}\) , pour les deux interfaces. La normale aux interfaces ainsi crées est notée \(\mathrm{n}\) et le vecteur tangent est noté \(\tau\) :
\(\mathrm{n}=(\begin{array}{c}0\\ -1/2\\ \sqrt{3}/2\end{array}),\tau =(\begin{array}{c}0\\ \sqrt{3}/2\\ 1/2\end{array})\) éq 6-1
Les nouvelles fonctions de niveau introduisant les deux fissures dans le fichier de commande sont :
\(\text{LN1}=\text{Z}-\tan\theta \cdot Y-(\text{LZ}/4-\tan\theta \cdot \text{LX}/2)\) éq 6-2
\(\text{LN2}=\text{Z}-\tan\theta \cdot Y-(3\cdot \text{LZ}/4-\tan\theta \cdot \text{LX}/2)\) éq 6-3
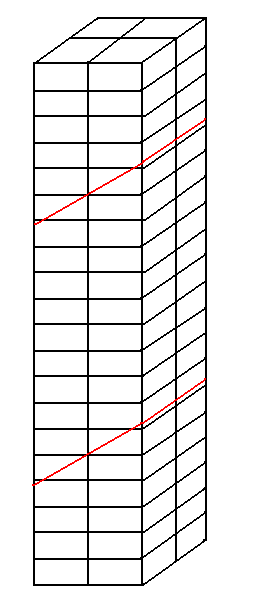
Figure 4.1-1: Maillage pourla modélisation CCaractéristiques du maillage#
Par rapport aux modélisations A et B, le nombre d’éléments suivant la direction \(Z\) (hauteur du barreau) a été multiplié par 2 afin d’éviter la contiguïté des éléments enrichis par les deux interfaces inclinées. On a donc un maillage \(2\times 2\times 20\) éléments HEXA8 (voir []).
Conditions aux limites#
Les conditions aux limites permettent de réaliser une sollicitation mixte : compression au niveau de la première interface et traction pour la deuxième.
Ainsi, en plus de l’encastrement des nœuds appartenant à la surface médiane (comme pour les deux premières modélisations), on impose des déplacements positifs suivant la direction \(Z\) pour les nœuds appartenant aux surfaces extrêmes (inférieure et supérieure). On aura donc:
GROUP_NO=SURFMED: DX = 0, DY = 0 et DZ = 0
GROUP_NO=SURFINF: DX = 0, DY = 0 et DZ = DEPZ
GROUP_NO=SURFSUP: DX = 0, DY = 0 et DZ = DEPZ
Résolution analytique#
La solution analytique concerne, pour le bloc inférieur (l’interface 1), les valeurs de la pression de contact et des semi-multiplicateurs de frottement. Pour le bloc supérieur (l’interface 2), la solution analytique concerne les valeurs de déplacements des nœuds. La solution pour ce dernier est identique à celle de la modélisation A et donc on va détailler seulement la solution analytique pour le bloc inférieur.
Les interfaces étant inclinées, on pourra avoir du glissement. Pour éviter cela, on force l’adhérence en choisissant un coefficient de frottement de Coulomb suffisamment élevé. Théoriquement, il suffit de prendre :
\(\mu >\tan(\theta )\) éq 6.3-1
Ainsi, la solution du problème reste identique à celle du même problème sans interface. La résolution analytique pour ce problème est présentée dans [V604182 - §4.1]. On trouve pour la pression de contact :
\(\lambda ={n}_{z}\cdot E\frac{\text{DEPZ}}{\text{LZ}/2}\cdot {n}_{z}\) éq 6.3-2
et pour les semi-multiplicateurs de frottement:
\(\Lambda =(\frac{1}{\mu}\frac{{\tau}_{z}}{{n}_{z}})\tau\) éq 6.3-3
Avec les valeurs numériques précédemment introduites et considérant \(\mu =1\) , on obtient pour la pression de contact \(\lambda =-{9.10}^{3}\mathit{Pa}\) et pour le semi-multiplicateur de frottement suivant la direction \(\tau\) , \(\Lambda \cdot \tau =1/\sqrt{3}\) .
Grandeurs testées et résultats#
On teste les valeurs de la pression de contact et des semi-multiplicateurs de frottement pour l’interface 1. Pour l’interface 2 on teste les valeurs des déplacements au dessus et en dessous de la level-set.
Identification |
Référence |
DXpour tous les nœuds juste en dessous de l’interface inférieure |
0.00 |
DXpour tous les nœuds juste au dessus de l’interface inférieure |
0.00 |
DYpour tous les nœuds juste en dessous de l’interface inférieure |
0.00 |
DYpour tous les nœuds juste au dessus de l’interface inférieure |
0.00 |
LAGS_Cpour tous les nœuds de l’interface inférieure |
-9E3 |
LAGS_F1pour tous les nœuds de l’interface inférieure |
0 |
LAGS_F2pour tous les nœuds de l’interface inférieure |
\(1/\sqrt{3}\) |
DXpour tous les nœuds juste en dessous de l’interface supérieure |
0.00 |
DXpour tous les nœuds juste au dessus de l’interface supérieure |
0.00 |
DYpour tous les nœuds juste en dessous de l’interface supérieure |
0.00 |
DYpour tous les nœuds juste au dessus de l’interface supérieure |
0.00 |
DZpour tous les nœuds juste en dessous de l’interface supérieure |
0.00 |
DZpour tous les nœuds juste au dessus de l’interface supérieure |
3.0E-3 |
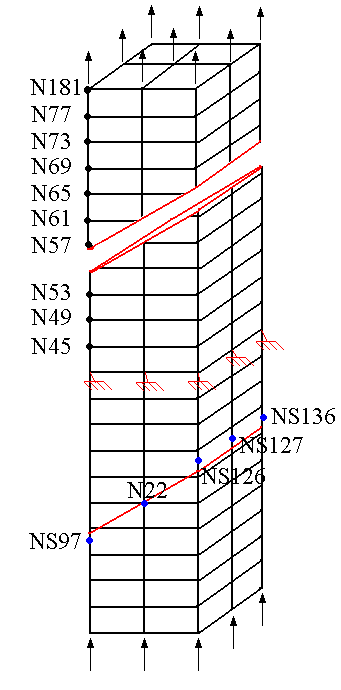
Figure 4.4-1: Maillage final et positionnement des nœuds testés
Pour tester tous les nœuds en une seule fois, on teste le minimum et le maximum de la colonne.
Remarques#
On vérifie que les valeurs numériques obtenues pour les degrés de liberté testés, suite à l’analyse avec plusieurs interfaces X-FEM, sont bien identiques avec les valeurs de la solution analytique pour les deux interfaces.
Modélisation D – Interfaces multiples en 2D#
Cette modélisation a pour but de tester le fonctionnement de la X-FEM multi-fissuration pour une structures \(\mathrm{2D}\) .
Caractéristiques du maillage#
On choisit de modéliser la structure \(\mathrm{2D}\) par un maillage composé de \(2\times 10\) éléments QUAD4, comme montré sur la [].
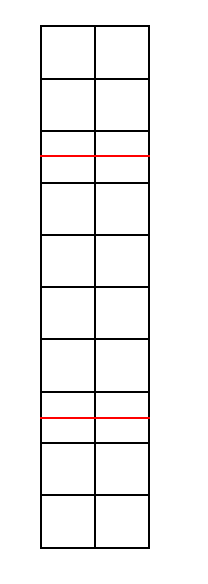
Figure 5.1-1: Maillage pour la modélisation D
Conditions aux limites#
Les conditions aux limites sont similaires à celles imposées pour la modélisation A, adaptées évidemment pour le cas \(\mathrm{2D}\) . On encastre les nœuds appartenant la ligne médiane et on impose des déplacements aux nœuds appartenant aux lignes extrêmes (inférieure et supérieure). On a donc :
GROUP_NO=LIGMED: DX = 0 et DY = 0
GROUP_NO=LIGINF: DX = 0 et DY = -DEPY
GROUP_NO=LIGSUP: DX = 0 et DY = DEPY
On considère \(\mathit{DEPY}=2.E-3\) .
Résolution analytique#
La solution d’un tel problème est bien sûr encore évidente : tous les déplacements suivant \(x\) sont nuls, tous les déplacements suivant \(y\) en dessous de la level-set inférieure sont égaux au déplacement imposé \({u}_{y}\) à la base de la structure, tous les déplacements suivant \(y\) entre les deux level set sont nuls et tous les déplacements suivant \(y\) au dessus de la level-set supérieure sont égaux au déplacement imposé \({u}_{y}\) au sommet de la structure.
Grandeurs testées et résultats#
On teste les valeurs du déplacement après convergence des itérations de l’opérateur STAT_NON_LINE. On ne teste à chaque fois qu’un seul nœud de chaque étage et on obtient le tableau suivant ou la position de chaque nœud testé est indiquée sur la [].
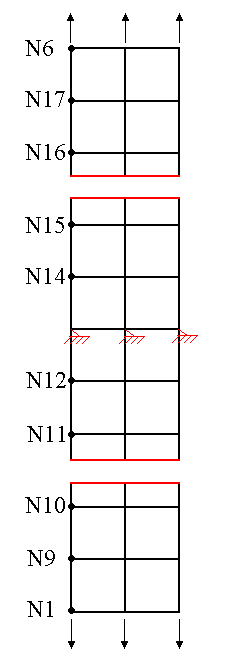
Figure 5.4-1: Maillage final et positionnement des nœuds testés
Identification |
Référence |
DXpour tous les nœuds juste en dessous de l’interface inférieure |
0.00 |
DXpour tous les nœuds juste au dessus de l’interface inférieure |
0.00 |
DYpour tous les nœuds juste en dessous de l’interface inférieure |
-2.00E-3 |
DYpour tous les nœuds juste au dessus de l’interface inférieure |
0.00 |
DXpour tous les nœuds juste en dessous de l’interface supérieure |
0.00 |
DXpour tous les nœuds juste au dessus de l’interface supérieure |
0.00 |
DYpour tous les nœuds juste en dessous de l’interface supérieure |
0.00 |
DYpour tous les nœuds juste au dessus de l’interface supérieure |
2.00E-3 |
Synthèses des résultats#
Les objectifs de ce test sont atteints. Il s’agissait de valider le fonctionnement de l’évolution de la X-FEM vers la multi-fissuration. On a pu constater la bonne prise en compte de deux interfaces dans plusieurs situations : modèles \(\mathrm{3D}\) et \(\mathrm{2D}\) , interfaces horizontales, interfaces inclinées, contact sans ou avec frottement, etc.
Tous les opérateurs qui ont subi des modifications pour le passage à la multi-fissuration fonctionnent correctement.