v6.04.510 SSNV510 - Compression uniaxiale d’un bloc multi-fissuré#
Résumé:
Ce test permet de valider l’approche multi-Heaviside pour les éléments X-FEM. Il s’agit d’un cas test où on introduit plusieurs interfaces comprimés latéralement. Le maillage est assez grossier de sorte que les mailles voient plusieurs fissures. Certains nœuds voient aussi plusieurs fissures. Ces nœuds contiennent alors plusieurs enrichissements Heaviside. On vérifie que ces différents enrichissements sont bien pris en compte au niveau cinématique et que les matrices de rigidité associées à chaque zone entre deux interfaces permettent d’obtenir les bonnes déformées. On teste l’approche avec et sans contact.
Solution de référence#
Le coefficient de poisson étant nul, on doit retrouver une compression uniforme à chacun des 4 étages de la structure. Autrement dit pour un étage donné, le déplacement de la structure est proportionnel à la position selon \(X\) et il dépend de la Pression qui varie suivant \(Y\) . Le déplacement selon \(Y\) ne dépend que linéairement de \(Y\) car la pression imposée \({\mathit{Press}}_{y}\) est constante.
On a donc pour tous les points de la structure le déplacement qui vaut:
\({\mathit{Depl}}_{X}(X,Y)=(2-X)\frac{{\mathit{Press}}_{x}(Y)}{E}\) éq 2.1-1
\({\mathit{Depl}}_{Y}(Y)=-Y\frac{{\mathit{Press}}_{y}}{E}\) éq 2.1-2
Calcul de l’énergie de la structure#
Soit \({p}_{x}=10\text{MPa}\) et \({p}_{y}=10\text{MPa}\) dans les cas avec contact, \({p}_{y}=0\text{MPa}\) dans les cas sans contact. Le tenseur des contraintes solution analytique est:
\(\sigma ={\sigma}_{xx}(y){e}_{x}\otimes {e}_{x}-{p}_{y}{e}_{y}\otimes {e}_{y}\)
où on a posé:
\({\sigma}_{xx}(y)=\lbrace \begin{array}{c}0\text{pour}y<\frac{1}{2},\\ -{p}_{x}\text{pour}y\in \left[\frac{1}{2},\frac{3}{2}\right[,\\ -2{p}_{x}\text{pour}y\in \left[\frac{3}{2},\frac{5}{2}\right[,\\ -3{p}_{x}\text{pour}y\in \left[\frac{5}{2},\frac{7}{2}\right[,\\ -4{p}_{x}\text{pour}y\ge \frac{7}{2},\end{array}\)
Soit \(\Omega =[0,2]\times [0,4]\) le domaine occupé par le solide. L’énergie de la structure est définie par:
\({E}^{e}=\frac{1}{2}{\int}_{\Omega}\sigma :\epsilon \mathit{dS}\)
Puisque \(\nu =0\) , on a \(\epsilon =\frac{1}{E}\sigma\) . D’où:
\(\sigma :\epsilon =\frac{1}{E}\left({\sigma}_{xx}{(y)}^{2}+{p}_{y}^{2}\right)\)
On a donc:
\({E}^{e}=\frac{1}{2}\frac{1}{E}\underset{0}{\overset{2}{\int}}\left(\underset{0}{\overset{4}{\int}}\left({\sigma}_{xx}{(y)}^{2}+{p}_{y}^{2}\right)\mathit{dy}\right)\mathit{dx}\)
Soit:
\({E}^{e}=\frac{1}{E}\left(\underset{\frac{1}{2}}{\overset{\frac{3}{2}}{\int}}{p}_{x}^{2}\mathit{dy}+\underset{\frac{3}{2}}{\overset{\frac{5}{2}}{\int}}4{p}_{x}^{2}\mathit{dy}+\underset{\frac{5}{2}}{\overset{\frac{7}{2}}{\int}}9{p}_{x}^{2}\mathit{dy}+\underset{\frac{7}{2}}{\overset{4}{\int}}16{p}_{x}^{2}\mathit{dy}+\underset{0}{\overset{4}{\int}}{p}_{y}^{2}\mathit{dy}\right)\)
On a donc, pour \({p}_{x}\) et \({p}_{x}\) exprimés en MPa:
\({E}^{e}=\frac{1}{E}\left(22{p}_{x}^{2}+4{p}_{y}^{2}\right)\)
Ce résultat est valable dans le cas des contraintes planes et des déformations planes. Dans le cas 3D, l’épaisseur choisie est 1 m. L’expression de l’énergie est identique, mais les unités sont modifiées. On a alors, en contraintes planes et en déformations planes, avec contact:
\({E}^{e}=2,6\times {10}^{7}\text{MJ}\times {\text{m}}^{-1}\) ,
en 3D avec contact:
\({E}^{e}=2,6\times {10}^{7}\text{MJ}\) ,
en contraintes planes et en déformations planes, sans contact:
\({E}^{e}=2,2\times {10}^{7}\text{MJ}\times {\text{m}}^{-1}\) ,
en 3D, sans contact:
\({E}^{e}=2,2\times {10}^{7}\text{MJ}\) .
Calcul de la norme L2du déplacement#
Le champ de déplacement solution analytique est
\(u=\frac{{\sigma}_{xx}(y)}{E}(2-x){e}_{x}-\frac{{p}_{y}}{E}y{e}_{y},\)
La norme \({L}^{2}\) du déplacement est définie par:
\({\Vert u\Vert }_{{L}^{2}}^{2}={\int}_{\Omega}{\Vert u\Vert }^{2}\mathit{dS}\)
On a:
\({\Vert u\Vert }^{2}=\frac{{{\sigma}_{xx}(y)}^{2}}{{E}^{2}}{(2-x)}^{2}-\frac{{p}_{y}^{2}}{{E}^{2}}{y}^{2}\)
On a donc:
\({\Vert u\Vert }_{{L}^{2}}^{2}=\frac{1}{{E}^{2}}\underset{0}{\overset{4}{\int}}\left(\underset{0}{\overset{2}{\int}}\left[{{\sigma}_{xx}(y)}^{2}{(2-x)}^{2}-{p}_{y}^{2}{y}^{2}\right]\mathit{dx}\right)\mathit{dy}\)
Soit:
\({\parallel u\parallel }_{{L}^{2}}^{2}=\frac{1}{{E}^{2}}\underset{0}{\overset{4}{\int}}\left(\frac{8}{3}{{\sigma}_{xx}(y)}^{2}-2{p}_{y}^{2}{y}^{2}\right)\mathit{dy}.\)
D’où:
\({\parallel u\parallel }_{{L}^{2}}^{2}=\frac{1}{{E}^{2}}\left[\frac{8}{3}\left(\underset{\frac{1}{2}}{\overset{\frac{3}{2}}{\int}}{p}_{x}^{2}\mathit{dy}+\underset{\frac{3}{2}}{\overset{\frac{5}{2}}{\int}}4{p}_{x}^{2}\mathit{dy}+\underset{\frac{5}{2}}{\overset{\frac{7}{2}}{\int}}9{p}_{x}^{2}\mathit{dy}+\underset{\frac{7}{2}}{\overset{4}{\int}}16{p}_{x}^{2}\mathit{dy}\right)+2\underset{0}{\overset{4}{\int}}{p}_{y}^{2}{y}^{2}\mathit{dy}\right].\)
Et finalement:
\({\parallel u\parallel }_{{L}^{2}}^{2}=\frac{1}{{E}^{2}}\left(\frac{176}{3}{p}_{x}^{2}+\frac{128}{3}{p}_{y}^{2}\right).\)
Soit:
\({\Vert u\Vert }_{{L}^{2}}=\frac{1}{E}\sqrt{\frac{176}{3}{p}_{x}^{2}+\frac{128}{3}{p}_{y}^{2}}.\)
Ce résultat est valable dans le cas des contraintes planes et des déformations planes. Dans le cas 3D, l’épaisseur choisie est 1 m. L’expression de la norme \({L}^{2}\) du déplacement est identique, mais les unités sont modifiées.
On a alors, en contraintes planes et en déformations planes, avec contact:
\({\Vert u\Vert }_{{L}^{2}}\approx 1,00664459137{\text{m}}^{2}\)
en 3D avec contact:
\({\Vert u\Vert }_{{L}^{2}}\approx 1,00664459137{\text{m}}^{\frac{5}{2}}\)
en contraintes planes et en déformations planes, sans contact:
\({\Vert u\Vert }_{{L}^{2}}\approx 0,765941686205{\text{m}}^{2}\)
en 3D, sans contact:
\({\Vert u\Vert }_{{L}^{2}}\approx 0,765941686205{\text{m}}^{\frac{5}{2}}\)
Modélisation A#
Il s’agit d’une modélisation X-FEM, en déformations planes, où les interfaces sont définies par des fonctions de niveau (level sets normales notées \(\text{LN}\) ).
Les équations des fonctions de niveaux pour les trois fissures horizontales sont les suivantes :
\(\text{LN}1=Y-0.5\) éq 3.1-1
\(\text{LN}1=Y-1.5\) éq 3.1-2
\(\text{LN}2=Y-2.5\) éq 3.1-3
\(\text{LN}3=Y-3.5\) éq 3.1-4
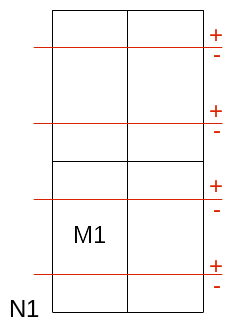
Figure 3.2-a: Le maillage de la modélisation A.
Le maillage comporte 4 mailles de type QUAD4, représentées sur la figure 3.2-a.
On remarque sur cette figure par exemple que le nœud \(\mathrm{N1}\) voit 2 fissures. Il doit donc être enrichi 2 fois et il possède alors les degrés de liberté cinématiques DX, DY, H1X, H1Y, H2X et H2Y. Le contact étant actif, Le nœud \(\mathrm{N1}\) possède aussi les degrés de Lagrange LAGS_C et LAG2_C.
D’autre part on remarque par exemple que la maille \(\text{M1}\) «voit» 4 fissures. L’élément associé à cette maille stockera donc les champs des quatre fissures, indépendamment des degrés de liberté qui sont associés à ses nœuds.
On teste les déplacements au niveau des lèvres de la fissure. Le déplacement DX doit suivre la fonction \(\text{Depl\_X}\) de l’équation 2.1-1. Le déplacement DY doit suivre la fonction \(\text{Depl\_Y}\) de l’équation 2.1-2. On obtient la déformée en escalier de la figure 3.4-a.
Identification |
Référence |
SOMM_ABSpour DX- \(\text{Depl\_X}\) (coté maître) |
0 |
SOMM_ABSpour DY- \(\text{Depl\_Y}\) (coté maître) |
0 |
SOMM_ABSpour DX- \(\text{Depl\_X}\) (coté esclave) |
0 |
SOMM_ABS pour DY- \(\text{Depl\_Y}\) (coté esclave) |
0 |
Tableau 3.3-1
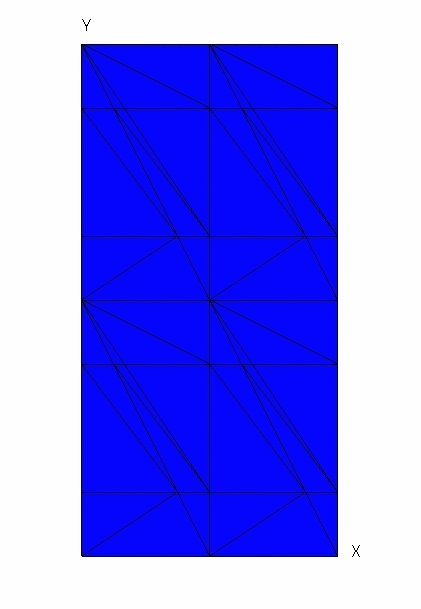
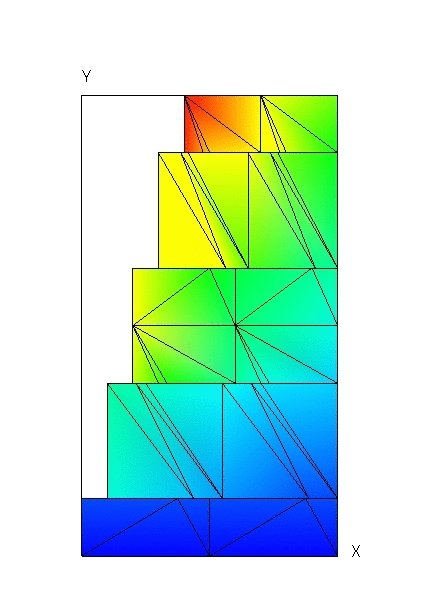
Figure 3.4-a : Déformée de la structure.
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Ee |
“ANALYTIQUE” |
2,6 107 |
0.1% |
On teste la valeur de \({\parallel u\parallel }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
1,00664459137 |
0.1% |
Modélisation B#
Il s’agit de la même modélisation que la modélisation A, mais en contraintes planes.
Le maillage est le même que celui de la modélisation A.
Les grandeurs testées sont identiques à celles décrites dans la modélisation A. On obtient la déformée en escalier de la figure 3.4-a.
Identification |
Référence |
SOMM_ABSpour DX- \(\text{Depl\_X}\) (coté maître) |
0 |
SOMM_ABSpour DY- \(\text{Depl\_Y}\) (coté maître) |
0 |
SOMM_ABSpour DX- \(\text{Depl\_X}\) (coté esclave) |
0 |
SOMM_ABS pour DY- \(\text{Depl\_Y}\) (coté esclave) |
0 |
Tableau 4.3-1
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Ee |
“ANALYTIQUE” |
2,6 107 |
0.1% |
On teste la valeur de \({\parallel u\parallel }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
1,00664459137 |
0.1% |
Modélisation C#
Il s’agit de la même modélisation que la modélisation A, mais en 3D.
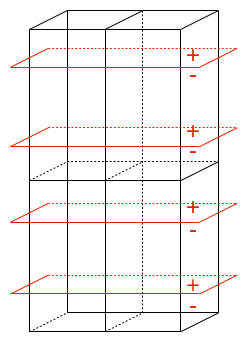
Figure 5.2-a: Le maillage de la modélisation C.
Le maillage comporte 4 mailles de type HEXA8, représentées sur la figure 5.2-a.
Même remarque que pour le maillage de la modélisation A. Certaines mailles «voient» 2 fissures, ils possèdent les degrés de liberté cinématique DX, DY, DZ, H1X, H1Y, H1Z, H2X et H2Y, H2Z ainsi que les degrés de liberté de Lagrange LAGS_C et LAG2_C. d’autres «voient» 4 fissures, ils possèdent aussi les degrés de liberté cinématiques H3X, H3Y, H3Z, H4X et H4Y, H4Z ainsi que les degrés de liberté de Lagrange LAG3_C et LAG4_C.
Les grandeurs testées sont identiques à celles décrites dans la modélisation A. On obtient la déformée en escalier de la figure 5.4-a.
Identification |
Référence |
SOMM_ABSpour DX- \(\text{Depl\_X}\) (coté maître) |
0 |
SOMM_ABSpour DY- \(\text{Depl\_Y}\) (coté maître) |
0 |
SOMM_ABSpour DX- \(\text{Depl\_X}\) (coté esclave) |
0 |
SOMM_ABS pour DY- \(\text{Depl\_Y}\) (coté esclave) |
0 |
Tableau 5.3-1
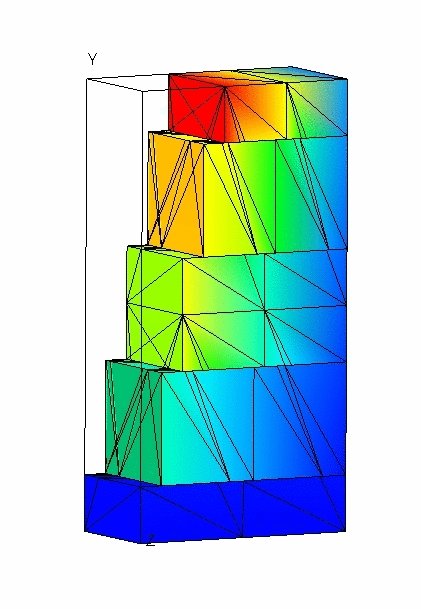
Figure 5.4-a : Déformée de la structure.
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Ee |
“ANALYTIQUE” |
2,6 107 |
0.1% |
On teste la valeur de \({\Vert u\Vert }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
1,00664459137 |
0.1% |
Modélisation G#
Il s’agit de la même modélisation que la modélisation A, sans contact.
Le maillage est le même que celui de la modélisation A.
Idem modélisation A, Sans contact, on a \(\text{Depl\_Y}=0\) .
Les grandeurs testées sont identiques à celles décrites dans la modélisation A.
Identification |
Référence |
SOMM_ABSpour DX- \(\text{Depl\_X}\) (coté maître) |
0 |
SOMM_ABSpour DY- \(\text{Depl\_Y}\) (coté maître) |
0 |
SOMM_ABSpour DX- \(\text{Depl\_X}\) (coté esclave) |
0 |
SOMM_ABS pour DY- \(\text{Depl\_Y}\) (coté esclave) |
0 |
Tableau 6.4-1
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Ee |
“ANALYTIQUE” |
2, 2107 |
0.1% |
On teste la valeur de \({\parallel u\parallel }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
0,765941686205 |
0.1% |
Modélisation H#
Il s’agit de la même modélisation que la modélisation G, mais en contraintes planes.
Le maillage est le même que celui de la modélisation A.
Les grandeurs testées sont identiques à celles décrites dans la modélisation A.
Identification |
Référence |
SOMM_ABSpour DX- \(\text{Depl\_X}\) (coté maître) |
0 |
SOMM_ABSpour DY- \(\text{Depl\_Y}\) (coté maître) |
0 |
SOMM_ABSpour DX- \(\text{Depl\_X}\) (coté esclave) |
0 |
SOMM_ABS pour DY- \(\text{Depl\_Y}\) (coté esclave) |
0 |
Tableau 7.3-1
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Ee |
“ANALYTIQUE” |
2, 2107 |
0.1% |
On teste la valeur de \({\parallel u\parallel }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
0,765941686205 |
0.1% |
Modélisation I#
Il s’agit de la même modélisation que la modélisation G, mais en 3D.
Le maillage est le même que celui de la modélisation C.
Les grandeurs testées sont identiques à celles décrites dans la modélisation A.
Identification |
Référence |
SOMM_ABSpour DX- \(\text{Depl\_X}\) (coté maître) |
0 |
SOMM_ABSpour DY- \(\text{Depl\_Y}\) (coté maître) |
0 |
SOMM_ABSpour DX- \(\text{Depl\_X}\) (coté esclave) |
0 |
SOMM_ABS pour DY- \(\text{Depl\_Y}\) (coté esclave) |
0 |
Tableau 8.3-1
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Ee |
“ANALYTIQUE” |
2, 2107 |
0.1% |
On teste la valeur de \({\parallel u\parallel }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
0,765941686205 |
0.1% |
Synthèse des résultats#
Ce test permet d’activer le multi-Heaviside pour les éléments X-FEM. On montre que l’on est capable de différencier le nombre de fissures «vues» par maille, de celui «vues» par nœud. Dans l’exemple de ce cas test, certains nœuds voient au maximum 2 fissures alors que les mailles en voient 4. On montre aussi qu’il est possible de prendre en compte des conditions de contact sur les interfaces, les nœuds sont alors aussi enrichis par de multiple degrés de liberté de Lagrange.
L’approche a été validée en D_PLAN, en C_PLAN et en 3D, pour les petits et les grands glissements.