r3.08.01 Éléments “exacts” de poutres#
Résumé :
Ce document présente les éléments de poutre de Code_Aster basés sur une résolution exacte des équations du modèle continu effectuée pour chaque élément du maillage.
Les poutres sont droites: éléments POU_D_T et POU_D_E. Les poutres courbes seront modélisées à l’aide d’un maillage suffisamment fin, sur lequel on affecte un modèle de poutre droite. La section, constante ou variable sur la longueur, peut être de forme quelconque. Le matériau est homogène, isotrope, élastique linéaire.
Les hypothèses retenues sont les suivantes:
Hypothèse d’Euler: le cisaillement transverse est négligé, ainsi que l’inertie de rotation. Cette hypothèse est vérifiée pour de forts élancements: élément POU_D_E.
Hypothèse de Timoshenko: le cisaillement transverse et tous les termes d’inertie sont pris en compte. Cette hypothèse est à utiliser pour des élancements faibles: éléments POU_D_T.
Hypothèse de Saint-Venant: la torsion est libre.
Le traitement des divers chargements et des grandeurs attendues en résultat (contraintes-efforts) est également présenté.
Avant-propos
Cette documentation de référence des éléments de poutre a été effectuée à partir d’un travail réalisé par M.T.Bourdeix, P.Hemon, O.Wilk de l’Institut Aérotechnique du Conservatoire National des Arts et Métiers, dans le cadre d’un Contrat Externe de Recherche et Développement avec ce laboratoire.
Le volume de ce document est dû à la fois à la précision recherchée et au caractère didactique de l’exposé, qui est volontairement conservé.
Introduction#
Une poutre est un solide engendré par une surface d’aire \(S\) dont le centre d’inertie géométrique \(G\) décrit une courbe \(C\) appelée la fibre moyenne ou fibre neutre. L’aire \(S\) est la section droite (section transversale) ou profil, et l’on suppose que si elle est évolutive, ses évolutions (taille, forme) sont continues et progressives lorsque \(G\) décrit la ligne moyenne.
Pour l’étude des poutres en général, on fait les hypothèses suivantes:
la section droite de la poutre est indéformable,
le déplacement transversal est uniforme sur la section droite.
Ces hypothèses permettent d’exprimer les déplacements d’un point quelconque de la section, en fonction des déplacements du point correspondant situé sur la ligne moyenne, et en fonction d’un accroissement de déplacement dû à la rotation de la section autour des axes transversaux. Cette dernière peut être négligée (POU_D_E) ou faire l’objet d’une modélisation (POU_D_T).
La discrétisation en éléments “exacts” de poutre s’effectue sur un élément linéique à deux nœuds et six degrés de liberté par nœuds. Ces degrés de liberté sont les trois translations \(u,v,w\) et les trois rotations \({\theta}_{x},{\theta}_{y},{\theta}_{z}\) .
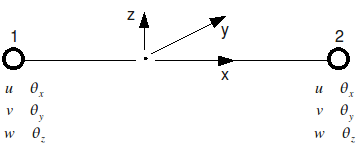
Figure 2-a: élément de poutre et degrés de libertés.
Attendu que les déformations sont locales, il est construit en chaque sommet du maillage une base locale dépendant de l’élément sur lequel on travaille. La continuité des champs de déplacements est assurée par un changement de base, ramenant les données dans la base globale.
Dans le cas des poutres droites, on place traditionnellement la ligne moyenne sur l’axe \(x\) de la base locale, les déplacements transversaux s’effectuant ainsi dans le plan \((y,z)\) .
Enfin lorsque nous rangeons des grandeurs liées aux degrés de liberté d’un élément dans un vecteur ou une matrice élémentaire (donc de dimension \(12\) ou \({12}^{2}\) ), on range d’abord les variables pour le sommet 1 puis celles du sommet 2. Pour chaque nœud, on stocke d’abord les grandeurs liées aux trois translations, puis celles liées aux trois rotations. Par exemple, un vecteur déplacement sera structuré de la manière suivante:
Les équations du mouvement#
Dans ce chapitre on présente les équations du mouvement des poutres en traction‑compression, en torsion et en flexion dans le domaine élastique. Dans chacun des cas, ces équations sont déduites par application des équations de Lagrange, issues du principe de Hamilton, ou bien en écrivant l’équilibre local d’un segment de poutre. Nous avons choisi de rappeler les deux méthodes, le lecteur pourra se référer à celle qui lui est la plus familière. On se limite ici aux cas où les seuls chargements sont des chargements répartis (pas de forces concentrées).
La traction-compression#
La traction‑compression est le mouvement de translation sur l’axe longitudinal de la poutre.
Équation d’équilibre local#
On considère un segment de longueur \(\mathrm{dx}\) soumis à un effort axial \(N\) [Figure 3.1.1-a] interne et une force extérieure \({f}_{\text{ext}}\) par unité de longueur.
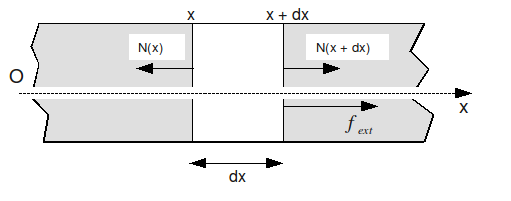
Figure 3.1.1-a : Segment de poutre chargé axialement.
La poutre a une section \(S(x)\) et est constituée d’un matériau de masse volumique \(\rho (x)\) et de module d’Young \(E(x)\) . Le principe fondamental de la mécanique permet d’écrire:
où u est le déplacement sur l’axe \(x\) du segment
Donc:
En passant à la limite quand \(dx \to 0\) , on obtient:
On ne conserve que les termes du premier ordre et on remplace dans (660), puis on utilise la loi de Hooke et l’hypothèse que la poutre est constituée de fibres longitudinales travaillant uniquement en traction-compression pour exprimer l’effort axial par:
On obtient ainsi après simplification par \(dx\) :
qui représente l’équilibre local au premier ordre d’une poutre, pour un mouvement de traction‑compression.
Méthode du Lagrangien#
Reprenant le segment de poutre de la figure l’énergie cinétique totale de la poutre de longueur \(l\) s’écrit:
On notera pour la suite \({E}_{{c}_{e}}=\frac{1}{2}\rho S{\left(\frac{\partial \mathrm{u}}{\partial t}\right)}^{2}\) l’énergie cinétique élémentaire.
L’énergie interne de déformation, grâce à la loi de Hooke s’écrit:
On notera de même \({E}_{{p}_{{int}_{e}}}=\frac{1}{2}\text{ES}{\left(\frac{\partial \mathrm{u}}{\partial x}\right)}^{2}\) .
On a également le travail de la force externe donné par:
et au niveau élémentaire \({E}_{{p}_{{\text{ext}}_{e}}}={f}_{\text{ext}}.u\)
Le lagrangien est donné par:
et la densité lagrangienne:
Pour le système continu monodimensionnel, l’équation de Lagrange s’écrit dans ce cas:
où \({u}^{'}\) et \(\dot{u}\) désignent respectivement la dérivée par rapport à \(x\) et par rapport au temps. Son application nous ramène évidemment à l’équation du mouvement d’une poutre en traction‑compression (662).
La torsion pure (torsion de Saint-Venant)#
La torsion est le mouvement de rotation autour de l’axe longitudinal de la poutre. On suppose ici que le centre de gravité est confondu avec le centre de rotation (de torsion) [R3.03.03], et on néglige le gauchissement de la section. Le cas de l’excentrement du centre de torsion par rapport au centre de gravité est traité au [§ 5.1 ].
Équation d’équilibre local#
On considère un segment de longueur \(dx\) mis en rotation sous l’action d’un moment \({M}_{x}\) [Figure 3.2.1-a] interne et d’un couple extérieur \({\Gamma}_{x}\) par unité de longueur.
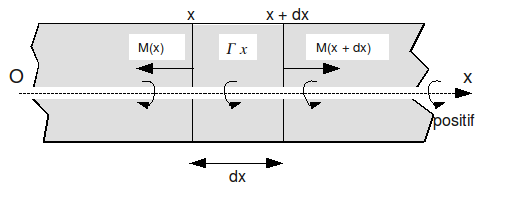
Figure 3.2.1-a : Segment de poutre en rotation autour de \((\mathrm{Ox})\)
Le segment est tourné d’un angle \({\theta}_{x}\) par rapport à la position non déformée. Nous avons ainsi:
Poutre de section circulaire#
avec \({I}_{{q}_{x}}={\int}_{s}\rho {r}^{2}\text{ds}\) est le moment d’inertie plane de la section \(S\) autour de l’axe de rotation \((0,x)\) .
Comme pour la traction, on obtient après division par \(\text{dx}\) et passage à la limite:
On introduit la loi de comportement:
où \(G\) est le module de Coulomb (ou module de cisaillement) et \({I}_{p}\) le moment géométrique polaire par rapport au centre de gravité de la section. (On a d’ailleurs: \({I}_{{\theta}_{x}}=\rho {I}_{p}\) pour un matériau de masse volumique homogène).
Nous obtenons alors l’expression:
qui représente l’équilibre local au premier ordre d’un segment de poutre pour un mouvement de torsion.
Poutre de section quelconque#
Pour tenir compte du gauchissement tout en restant dans l’hypothèse de torsion libre, dans le cas des sections non circulaires on est conduit à remplacer le moment \({I}_{p}\) par une constante de torsion \(C\) (inférieure à \({I}_{p}\) ) dans l’équation de torsion ([R3.03.03] pour le calcul de \(C\) ).
Par définition, \({M}_{x}=GC\frac{\partial {\theta}_{x}}{\partial x}\) . On obtient alors:
Lorsque le centre de gravité de la section n’est pas le centre de rotation, cette expression n’est pas valable et les mouvements de torsion et de flexion sont couplés.
Méthode du Lagrangien#
Nous avons de la même manière qu’au [§ 3.1.2 l’énergie cinétique (par exemple pour une poutre de section circulaire):
l’énergie potentielle interne
et le travail du couple extérieur
En appliquant l’équation de Lagrange (663) à la variable \({\theta}_{x}\) , on aboutit naturellement à (664) donnant le mouvement d’une poutre en torsion pure.
La flexion simple#
La flexion est le mouvement de translation et de rotation autour d’un axe perpendiculaire à l’axe longitudinal de la poutre. On parle ici de flexion simple (autour de \(\mathrm{Oy}\) ou \(\mathrm{Oz}\) ). On se limite au cas des poutres droites. Les poutres courbes sont traitées au [§ 8 ].
On décrit l’équation de flexion dans le plan \((O,x,z)\) , l’extension au plan \((O,x,y)\) est immédiate [Figure 3.3-a].
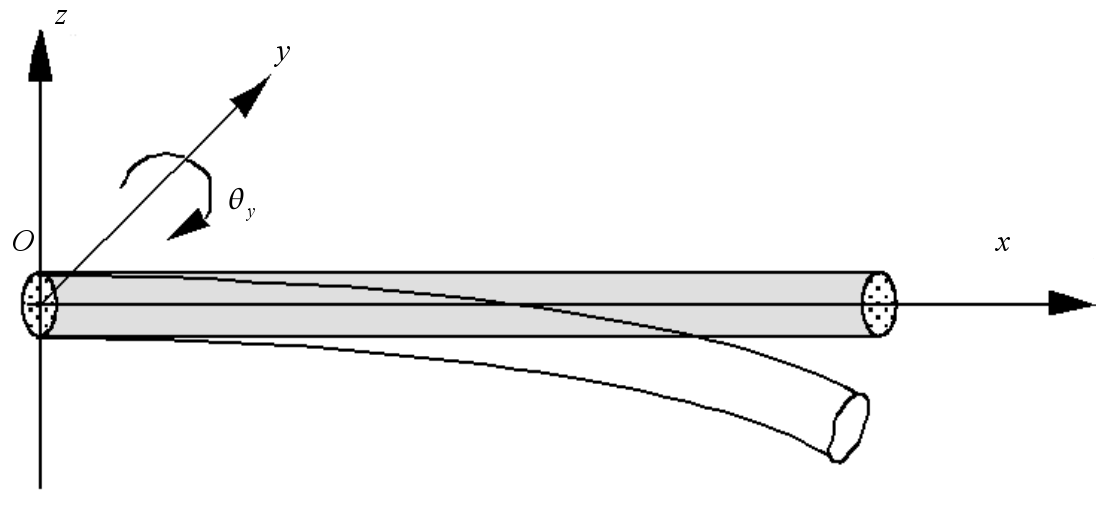
Figure 3.3-a : Flexion d’une poutre dans le plan \((O,x,z)\) .
La translation suivant l’axe \((O,z)\) est notée \(w\) et la rotation autour de \((O,y)\) est notée \({\theta}_{y}\) .
Équation d’équilibre local#
On considère un segment de longueur \(\mathrm{dx}\) soumis à l’effort tranchant \({V}_{z}\) , le moment de flexion \({M}_{y}\) , un effort externe \({t}_{{z}_{\text{ext}}}\) réparti uniformément par unité de longueur, et un couple externe \({m}_{{y}_{\text{ext}}}\) réparti uniformément par unité de longueur [Figure 3.3.1-a].
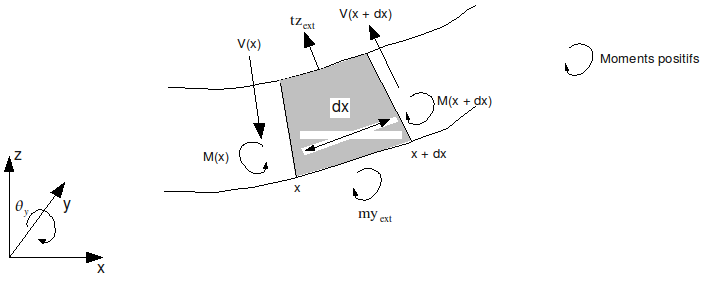
Figure 3.3.1-a : Segment de poutre en flexion dans le plan \((O,x,z)\)
L’équilibre local des forces et des moments (sur la section d’abscisse \(x+\mathrm{dx}\) ) donne pour les forces:
et pour les moments
On néglige les termes en \(\mathrm{dx²}\) . En passant à la limite quand \(\mathrm{dx}\) tend vers 0, on obtient:
On note que l’effort uniformément réparti \({t}_{{z}_{\text{ext}}}\) produit un terme qui est du second ordre dans l’équilibre des moments et est ainsi négligé. On introduit ensuite les relations de comportement de la résistance des matériaux.
L’expression (666) de \({V}_{z}\) est due à Timoshenko [bib 4] où \({k}_{z}\) est le coefficient de cisaillement dans la direction \(z\) . Elle caractérise le modèle de poutre de Timoshenko; on verra par la suite que le modèle de poutre d’Euler correspond à une simplification du modèle de Timoshenko. \({I}_{z}\) est le moment géométrique de la section par rapport à l’axe \((O,y)\) .
En conséquence, on aboutit aux deux équations couplées en \(w\) et \({\theta}_{y}\) pour la flexion dans le plan \((O,x,z)\) .
Lorsque la poutre est uniforme, c’est-à-dire que la section et le matériau sont constants sur l’axe longitudinal, les équations (667) et (668) se réduisent à une seule équation en \(w\) . Pour cela, on dérive une seule fois par rapport à l’abscisse x l’équation d’équilibre des moments (668).
\(EI_{y}\frac{{\partial}^{3}{\theta}_{y}}{\partial {x}^{3}}-{k}_{z}\text{SG}\left(\frac{{\partial}^{2}w}{\partial {x}^{2}}+\frac{\partial {\theta}_{y}}{\partial x}\right)=\rho {I}_{y}\frac{{\partial}^{3}{\theta}_{y}}{\partial x\partial {t}^{2}}\)
On constatera que cette manipulation élimine la présence du terme issu d’un couple extérieur uniformément réparti. Ensuite, l’équation (667) peut se mettre sous la forme:
Il reste utile pour ce type d’équation de rappeler la signification physique des différents termes, afin lors des simplifications d’avoir conscience des effets négligés.
\(EI_{y}\frac{{\partial}^{4}w}{\partial {x}^{4}}\) équilibre la densité de chargement dans la direction de la translation due au moment de flexion.
\(\rho S\frac{{\partial}^{2}w}{\partial {t}^{2}}\) est le terme d’inertie de translation.
\(\rho {I}_{y}\frac{{\partial}^{4}w}{\partial {x}^{2}\partial {t}^{2}}\) représente l’inertie de rotation de flexion.
\(\rho {I}_{y}\frac{E}{{k}_{z}G}\frac{{\partial}^{4}w}{\partial {x}^{2}\partial {t}^{2}}\) est un terme supplémentaire de l’inertie de rotation due à la prise en compte du cisaillement transverse (hypothèse de Timoshenko).
\(\frac{{\rho}^{2}{I}_{y}}{{k}_{z}G}\frac{{\partial}^{4}w}{\partial {t}^{4}}\) résulte du couplage entre l’inertie de rotation et l’inertie de translation provenant de l’effort tranchant.
Le modèle de poutre de Timoshenko (POU_D_T), prend en compte l’ensemble de ces termes, en particulier ceux qui sont relatifs à l’effort tranchant. On peut donc modéliser des poutres d’élancement faible.
Le modèle de poutre d’Euler (POU_D_E) est une simplification puisque les déformations en effort tranchant sont négligées ainsi que l’inertie de rotation (elle intervient dans les études dynamiques que pour les modes élevés). Ces hypothèses sont justifiées dans le cas d’une poutre d’élancement suffisamment grand. De ce fait, pour le modèle d’Euler, l’équation du mouvement de flexion, dans le cas général des poutres à section variable s’écrit:
Par ailleurs, c’est effectivement l’effort tranchant qui provoque la rotation des sections droites par rapport à l’axe neutre. Négliger cet effet revient ainsi à écrire que \({V}_{z}=0\) ce qui amène à (666).
qui est la traduction de l’hypothèse d’Euler.
Pour ce qui concerne la flexion dans le plan \((O,x,y)\) , la même démarche conduit à [éq] pour la poutre de Timoshenko à:
et lorsque la section est constante:
L’utilisation de l’hypothèse d’Euler dans le plan \((O,x,y)\) \({\theta}_{z}=\frac{\partial v}{\partial x}\) permet d’aboutir à l’équation du mouvement de flexion pour une poutre d’Euler selon (674):
Méthode du Lagrangien#
L’énergie cinétique s’exprime par:
en fonction des déplacements en rotation et en translation.
L’énergie potentielle interne vaut:
où \({\sigma}_{{c}_{T}}\) est la contrainte en cisaillement transverse et le terme \(\frac{\partial w}{\partial x}+{\theta}_{y}\) la déformation de cisaillement. Le modèle de poutre d’Euler néglige ce terme tandis que le modèle de Timoshenko émet une hypothèse sur la répartition des contraintes \({\sigma}_{{c}_{T}}\) dans la section, compatible avec l’expression (666). Dans le cas général du modèle de Timoshenko, l’énergie potentielle interne s’écrit:
Le potentiel des charges externes s’exprime quant à lui par:
L’utilisation de l’équation de Lagrange [éq] appliquée une fois à la variable \(w\) puis à la variable \({\theta}_{y}\) nous ramène aux deux équations (667) et (668) décrivant le mouvement en flexion d’un segment de poutre.
Élément de poutre droite#
On décrit dans ce chapitre l’obtention des matrices élémentaires de rigidité et de masse pour l’élément de poutre droite, selon le modèle d’Euler (POU_D_E) ou de Timoshenko (POU_D_T). Les matrices de rigidité sont calculées avec l’option RIGI_MECA, et les matrices de masse avec l’option MASS_MECA pour la matrice cohérente, et l’option MASS_MECA_DIAG pour la matrice de masse diagonalisée.
Mouvement longitudinal de traction - compression#
Une difficulté pour écrire la formulation variationnelle vient du fait qu’il peut y avoir dans les structures composées de poutres des charges concentrées (assimilables à des Dirac). L’équation d’équilibre (660) doit être remplacée par:
On a omis par simplicité les forces d’inertie qui subiraient le même traitement que les forces extérieures \({f}_{\text{ext}}^{(x)}\) .
\({\delta}_{i}\) représente la fonction de Dirac localisée au point \(i\) , les \({f}_{i}^{c}\) sont les \(n_c\) forces concentrées appliquées à la poutre.
Pour l’application de la méthode des éléments finis, l’équation d’équilibre doit être écrite sous la forme du principe des travaux virtuels qui est dans ce cas:
Toute confusion étant exclue, \({\delta}_{i}\) désigne la mesure de Dirac associée au point \(i\) et \(v\) est un champ de déplacement longitudinal cinématiquement admissible quelconque.
En pratique, on suppose qu’il n’y a pas de force concentrée à l’intérieur des éléments de poutre, mais seulement aux nœuds extrémités.
Détermination de la matrice de rigidité#
Elle correspond à l’expression du travail virtuel des forces intérieures en fonction d’un déplacement donné. C’est-à-dire:
pour un élément de longueur \(\beamLength\).
On introduit la relation de comportement élastique:
En choisissant pour fonctions-test:
correspondant respectivement aux degrés de libertés \({u}_{1}\) et \({u}_{2}\) des deux nœuds de l’élément, on obtient directement:
et
La matrice de rigidité de l’élément est donc:
- Remarque
Dans l’expression du travail virtuel des efforts intérieurs, \(u\) n’intervient que pour \(u(0)\) et \(u(\beamLength)\). Le déplacement \(u\) n’a pas été discrétisé à l’intérieur de l’élément. C’est pourquoi l’élément est qualifié d” exact: on obtient la solution exacte aux nœuds, mais seulement aux nœuds.
Détermination du second membre#
Le second membre est l’expression du travail virtuel des efforts appliqués. Le second membre associé au chargement réparti et aux fonctions tests précédemment introduites est:
- Remarque
Dans [AFFE_CHAR_MECA], on peut introduire \({f}_{\text{ext}}\) comme une fonction quelconque de \(x\). Au niveau du calcul de \({f}_{1}\) et \({f}_{2}\) , par contre, l’intégration est faite en supposant que \({f}_{\text{ext}}\) varie linéairement entre les valeurs prises aux nœuds extrémités. Si on doit modéliser une variation de charge répartie non linéaire, il faut alors discrétiser plus finement. Mais insistons sur le fait que quelle que soit la forme de \({f}_{\text{ext}}(x)\) (polynomiale ou autre), si l’on sait calculer exactement les intégrales \({f}_{1}\) et \({f}_{2}\) , la solution du problème statique sera exacte aux nœuds du problème.
Le travail virtuel des forces concentrées (données par hypothèse aux nœuds des éléments) n’intervient pas directement au niveau de l’élément.
On introduit ces forces concentrées sous forme de forces nodales, directement dans le vecteur assemblé du second membre.
Calcul des efforts aux nœuds de la poutre#
Le Principe des Travaux Virtuels complet s’écrit en effet sur le système assemblé. D’autre part, en écrivant la formule d’intégration par partie sur toute la structure (poutre \(\left[{x}_{0},{x}_{1}\right]\) ):
\({\Gamma}_{j}\) représentant tous les intervalles sans discontinuité d’effort normal, donc sans force concentrée, et \({\vert N \vert}_{i}\) les sauts de \(N\) entre ces intervalles.
En effet, en rapprochant cette expression du Principe des Travaux Virtuels, on trouve, pour chaque charge concentrée (en choisissant les fonctions tests \(v\) appropriées):
Chaque élément fini de poutre est par hypothèse un intervalle sans discontinuité. Il peut donc y avoir discontinuité des efforts internes \(N\) d’un élément à l’autre s’il existe une force concentrée sur le nœud reliant les deux éléments.
Les efforts internes pour un élément se déterminent de la façon suivante. L’équation d’équilibre à l’intérieur d’un élément est:
La formule d’intégration par parties (676) sur l’élément donne:
En considérant \(N(\beamLength)\) et \(N(0)\) comme des données, on aurait pu obtenir cette formule directement du Principe des Travaux Virtuels (675).
En prenant encore les fonctions test:
On obtient:
Soit
C’est-à-dire que les efforts internes s’obtiennent en retranchant au produit \(\discMatr{K} \discVect{U}\) les forces nodales équivalentes aux charges réparties \({f}_{\text{ext}}\) .
On observe aussi qu’ils sont de signe opposé. Pour que le signe soit le même d’un élément à l’autre, il faut donc changer le signe de \(N(0)\) calculé par cette méthode. C’est ce qui est fait par le calcul de l’option EFGE_ELNO.
Détermination de la matrice de masse#
La matrice de masse pour être cohérente avec la matrice de rigidité est déterminée à partir des mêmes fonctions test. Cependant, il n’est plus possible de calculer exactement les forces nodales associées sans faire d’hypothèse sur la forme de la solution. Le calcul de la matrice de masse va entraîner une erreur de discrétisation.
Un calcul dynamique nécessitera donc une discrétisation de la structure de poutre en petits éléments, ce qui n’est pas le cas pour un calcul statique. Il va sans dire que dans le cas d’un calcul dynamique, le calcul des efforts que l’on conduira comme au [§ Détermination du second membre ] en retranchant les forces nodales d’inertie est également approché. La solution \(u\) est choisie dans l’espace engendré par les fonctions tests (c’est-à-dire les polynômes de degré au plus égal à 1):
La matrice de masse \(\discMatr{M}\) apparaît dans l’expression du travail virtuel dû aux forces d’inertie:
Le travail s’écrit également:
avec \({\rho}_{m}={\int}_{s} {\rho \, dS}\). Dans le cas d’un matériau homogène, avec \({\rho}_{m}=\rho \beamArea\);
En prenant \(u(x,t)={\xi}_{1}(x){u}_{1}(t)+{\xi}_{2}(x){u}_{2}(t)\) , on a:
La matrice de masse s’écrit donc:
et calculs faits:
correspondant respectivement aux degrés de libertés \({u}_{1}\) et \({u}_{2}\) des deux nœuds de l’élément.
Mouvement de torsion libre autour de l’axe longitudinal#
Le problème est analogue à celui de la traction compression. Pour une poutre \(\Gamma\), chargée par des moments de torsion répartie \({\Gamma}_{x}(x)\) et \(n_c\) moments concentrés \({\Gamma}_{i}^{c}\) , le principe des travaux virtuels s’écrit:
La loi de comportement est:
Aux variables près, cette équation a la même forme que celle du mouvement de traction‑compression. En utilisant le même raisonnement, on obtient les mêmes expressions pour les matrices de masse et de raideur élémentaires soit:
correspondant respectivement aux degrés de libertés \({\theta}_{{x}_{1}}\) et \({\theta}_{{x}_{2}}\) des deux nœuds de l’élément.
Le calcul de la matrice de masse ayant comme précédemment nécessité de discrétiser le champ solution.
Le second membre, dû au couple \({\Gamma}_{x}\) réparti, s’obtient de la même façon que pour le mouvement de traction‑compression:
Mouvement de flexion#
Nous nous plaçons ici dans le cadre d’une poutre droite à section constante de type Timoshenko. Nous tenons compte des effets de cisaillement transverse. La poutre d’Euler‑Bernoulli sera ensuite traitée par simplification des équations de Timoshenko.
La description de la flexion est plus complexe que les mouvements précédents, mais un choix judicieux de fonctions tests va nous permettre d’obtenir des résultats de même forme.
Flexion dans le plan (xOz)#
Avec des notations évidentes et en ne s’intéressant pas dans un premier temps, comme dans les cas précédents, aux efforts d’inertie, le principe des travaux virtuels s’écrit pour le mouvement de flexion dans le plan \((x0z)\) :
pour tout \((\Psi ,\omega )\) cinématiquement admissible.
La matrice de rigidité se déduit de l’expression du travail virtuel des forces intérieures que l’on va expliciter en utilisant la relation de comportement puis en intégrant par parties:
Les fonctions tests que l’on va choisir vont “vérifier les équations d’équilibre sans second membre”, c’est-à-dire (667) et (668):
Dans ces conditions, les forces nodales, expression du travail des forces intérieures dans ces déplacements virtuels donnés s’expriment exactement, sans hypothèse sur la forme de la solution, en fonction des déplacements en bout de poutre comme dans les cas précédents:
- Remarque
Il est clair que la condition (677) conduit à des fonctions tests dépendant explicitement des caractéristiques géométriques et matérielles de la poutre, mais cela n’a rien de gênant.
Les couples de fonctions tests choisis sont: \((\Psi ,\omega )=({\xi}_{i},{\xi}_{i+4})\) avec \(i=\left[1,4\right]\).
En ayant noté \({\varphi}_{y}=\frac{12 \youngModulus {I}_{y}}{{k}_{z}{ \beamArea \, G \, \beamLength^{2} }}\), les fonctions \({\xi}_{i}\) sont définies pour les déplacements (pour \(i=1,2,3,4\)) par:
et pour les rotations (pour \(i=5,6,7,8\)) par:
correspondant chacune respectivement aux degrés de libertés \({w}_{1}\), \({\theta}_{{y}_{1}}\), \({w}_{2}\) et \({\theta}_{{y}_{2}}\) des deux nœuds de l’élément,
On vérifie sans difficulté que les couples \(({\xi}_{i},{\xi}_{i+4})\) vérifient bien (677). De plus:
La matrice de rigidité se déduit aisément de (678) (en ordonnant les colonnes suivant \((w(0),{\theta}_{y}(0),w(\beamLength),{\theta}_{y}(\beamLength))\) .
Il est clair que le calcul des efforts se conduit de la même façon qu’au [§ Calcul des efforts aux nœuds de la poutre ].
Flexion dans le plan (xOy)#
La matrice de rigidité pour un mouvement de flexion dans le plan \(({xOy})\) s’obtient de la même façon que dans le cas précédent. Les fonctions tests qui conduisent à une expression exacte des forces nodales doivent cette fois vérifier (équation analogue à (677)):
Les couples de fonctions tests choisis sont:
correspondant chacune respectivement aux degrés de libertés \({v}_{1}\), \({\theta}_{{z}_{1}}\), \({v}_{2}\) et \({\theta}_{{z}_{2}}\) des deux nœuds de l’élément,
Les \({\xi}_{i}\) sont donnés par (679) et (680) en ayant remplacé \({\varphi}_{y}\) par \({\varphi}_{z}=\frac{12 \youngModulus {I}_{z}}{{k}_{y}{\beamArea \, G \, \beamLength^{2}}}\). La matrice de rigidité obtenue est:
Modélisations des coudes#
La modélisation des coudes de tuyauterie sont modélisés par les éléments de poutre droite POU_D_T en discrétisant la géométrie du coude avec 20 à 40 mailles pour un coude de 90°.
Dans le cas de la modélisation des coudes de tuyauteries (section circulaire creuse), il est possible de prendre en compte l’effet de l’ovalisation sur la rigidité en pondérant les inerties \({I}_{y}\) et \({I}_{z}\) (cf. § 10 ) par des coefficients de flexibilité donnés par l’utilisateur. Ce coefficient est à renseigner via le mot-clé POUTRE/SECTION=’COUDE’ de la commande AFFE_CARA_ELEM.
Détermination de la matrice de masse cohérente avec la matrice de rigidité#
Option ’MASS_MECA’ de l’opérateur CALC_MATR_ELEM.
Flexion dans le plan (xOz)#
Considérons le mouvement de flexion dans le plan \((xOz)\) , le travail des forces d’inertie s’écrit:
Dans le cas d’un matériau homogène, nous avons: \({\rho}_{m}=\rho S\) et \({\rho}_{{I}_{y}}=\rho {I}_{y}\)
\(w(x,t)\) et \({\theta}_{y}(x,t)\) sont discrétisés sur la base des fonctions tests introduites pour le calcul de la matrice de rigidité, soit:
autrement dit: \(w={w}^{t}{\xi}_{w}\) avec \(\underset{\text{~}}{\mathrm{w}}=\left(\begin{array}{c}{w}_{1}\\ {\theta}_{{y}_{1}}\\ {w}_{2}\\ {\theta}_{{y}_{2}}\end{array}\right)\) et \({\xi}_{\mathrm{w}}=\left(\begin{array}{c}{\xi}_{1}\\ {\xi}_{2}\\ {\xi}_{3}\\ {\xi}_{4}\end{array}\right)\), \({\theta}_{y}={\underset{\text{~}}{w}}^{t}{\xi}_{{\theta}_{y}}\) avec \({\xi}_{{\theta}_{y}}=\left(\begin{array}{c}{\xi}_{5}\\ {\xi}_{6}\\ {\xi}_{7}\\ {\xi}_{8}\end{array}\right)\)
En intégrant ces notations dans l’expression du travail des forces d’inertie, on a:
On en déduit l’expression de la matrice de masse:
pour \(i\) de 1 à 4 et \(j\) de 1 à 4. Soit:
\(\begin{array}{cc}\mathrm{M}& =\frac{\rho S}{{\left(1+{\varphi}_{y}\right)}^{2}}\left(\begin{array}{cccc}\frac{13L}{35}+\frac{7L{\varphi}_{y}}{10}+\frac{\beamLength{\varphi}_{y}^{2}}{3}& \frac{-11{\beamLength}^{2}}{210}-\frac{11{\beamLength}^{2}{\varphi}_{y}}{120}-\frac{{\beamLength}^{2}{\varphi}_{y}^{2}}{24}& \frac{9L}{70}+\frac{3L{\varphi}_{y}}{10}+\frac{\beamLength{\varphi}_{y}^{2}}{6}& \frac{13{\beamLength}^{2}}{420}+\frac{3{\beamLength}^{2}{\varphi}_{y}}{40}+\frac{{\beamLength}^{2}{\varphi}_{y}^{2}}{24}\\ \phantom{\rule{2em}{0ex}}& \frac{{\beamLength}^{3}}{105}+\frac{{\beamLength}^{3}{\varphi}_{y}}{60}+\frac{{\beamLength}^{3}{\varphi}_{y}^{2}}{120}& \frac{-13{\beamLength}^{2}}{420}-\frac{3{\beamLength}^{2}{\varphi}_{y}}{40}-\frac{{\beamLength}^{2}{\varphi}_{y}^{2}}{24}& \frac{-{\beamLength}^{3}}{140}-\frac{{\beamLength}^{3}{\varphi}_{y}}{60}-\frac{{\beamLength}^{3}{\varphi}_{y}^{2}}{120}\\ \phantom{\rule{2em}{0ex}}& \phantom{\rule{2em}{0ex}}& \frac{13L}{35}+\frac{7L{\varphi}_{y}}{10}+\frac{\beamLength{\varphi}_{y}^{2}}{3}& \frac{11{\beamLength}^{2}}{210}+\frac{11{\beamLength}^{2}{\varphi}_{y}}{120}+\frac{{\beamLength}^{2}{\varphi}_{y}^{2}}{24}\\ \phantom{\rule{2em}{0ex}}& \phantom{\rule{2em}{0ex}}& \phantom{\rule{2em}{0ex}}& \frac{{\beamLength}^{3}}{105}+\frac{{\beamLength}^{3}{\varphi}_{y}}{60}+\frac{{\beamLength}^{3}{\varphi}_{y}^{2}}{120}\end{array}\right)\\ \phantom{\rule{2em}{0ex}}& +\frac{\rho {I}_{y}}{{\left(1+{\varphi}_{y}\right)}^{2}}\left(\begin{array}{cccc}\frac{6}{5L}& \frac{-1}{10}+\frac{{\varphi}_{y}}{2}& \frac{-6}{5L}& \frac{-1}{10}+\frac{{\varphi}_{y}}{2}\\ \phantom{\rule{2em}{0ex}}& \frac{2L}{15}+\frac{\beamLength{\varphi}_{y}}{6}+\frac{\beamLength{\varphi}_{y}^{2}}{3}& \frac{1}{10}-\frac{{\varphi}_{y}}{2}& \frac{-\beamLength}{30}-\frac{\beamLength{\varphi}_{y}}{6}+\frac{\beamLength{\varphi}_{y}^{2}}{6}\\ \phantom{\rule{2em}{0ex}}& \phantom{\rule{2em}{0ex}}& \frac{6}{5L}& \frac{1}{10}-\frac{{\varphi}_{y}}{2}\\ \phantom{\rule{2em}{0ex}}& \phantom{\rule{2em}{0ex}}& \phantom{\rule{2em}{0ex}}& \frac{2L}{15}+\frac{\beamLength{\varphi}_{y}}{6}+\frac{\beamLength{\varphi}_{y}^{2}}{3}\end{array}\right)\end{array}\)
Il faut bien noter, comme en [§ Détermination de la matrice de masse ], que dans le cas dynamique, on n’est pas assuré d’avoir une solution exacte aux nœuds, comme c’est le cas en statique.
Flexion dans le plan (xOy)#
De même, pour le mouvement de flexion autour de l’axe \((Oz)\) , dans le plan \((xOy)\) , le travail des forces d’inertie s’écrit:
Cette fois \(v(x,t)\) et \({\theta}_{z}(x,t)\) sont discrétisés conformément au [§ Flexion dans le plan (xOy) ] par:
Nous obtenons alors la matrice de masse suivante:
\(\begin{array}{cc}\mathrm{M}& =\frac{\rho S}{{\left(1+{\varphi}_{z}\right)}^{2}}\left(\begin{array}{cccc}\frac{13L}{35}+\frac{7L{\varphi}_{z}}{10}+\frac{\beamLength{\varphi}_{z}^{2}}{3}& \frac{11{\beamLength}^{2}}{210}+\frac{11{\beamLength}^{2}{\varphi}_{z}}{120}+\frac{{\beamLength}^{2}{\varphi}_{z}^{2}}{24}& \frac{9L}{70}+\frac{3L{\varphi}_{z}}{10}+\frac{\beamLength{\varphi}_{z}^{2}}{6}& \frac{-13{\beamLength}^{2}}{420}-\frac{3{\beamLength}^{2}{\varphi}_{z}}{40}-\frac{{\beamLength}^{2}{\varphi}_{z}^{2}}{24}\\ & \frac{{\beamLength}^{3}}{105}+\frac{{\beamLength}^{3}{\varphi}_{z}}{60}+\frac{{\beamLength}^{3}{\varphi}_{z}^{2}}{120}& \frac{13{\beamLength}^{2}}{420}+\frac{3{\beamLength}^{2}{\varphi}_{z}}{40}+\frac{{\beamLength}^{2}{\varphi}_{z}^{2}}{24}& \frac{-{\beamLength}^{3}}{140}-\frac{{\beamLength}^{3}{\varphi}_{z}}{60}-\frac{{\beamLength}^{3}{\varphi}_{z}^{2}}{120}\\ & & \frac{13L}{35}+\frac{7L{\varphi}_{z}}{10}+\frac{\beamLength{\varphi}_{z}^{2}}{3}& \frac{-11{\beamLength}^{2}}{210}-\frac{11{\beamLength}^{2}{\varphi}_{z}}{120}-\frac{{\beamLength}^{2}{\varphi}_{z}^{2}}{24}\\ & & & \frac{{\beamLength}^{3}}{105}+\frac{{\beamLength}^{3}{\varphi}_{z}}{60}+\frac{{\beamLength}^{3}{\varphi}_{z}^{2}}{120}\end{array}\right)\\ & +\frac{\rho {I}_{z}}{{\left(1+{\varphi}_{z}\right)}^{2}}\left(\begin{array}{cccc}\frac{6}{5L}& \frac{1}{10}-\frac{{\varphi}_{z}}{2}& \frac{-6}{5L}& \frac{1}{10}-\frac{{\varphi}_{z}}{2}\\ & \frac{2L}{15}+\frac{\beamLength{\varphi}_{z}}{6}+\frac{\beamLength{\varphi}_{z}^{2}}{3}& \frac{-1}{10}+\frac{{\varphi}_{z}}{2}& \frac{-\beamLength}{30}-\frac{\beamLength{\varphi}_{z}}{6}+\frac{\beamLength{\varphi}_{z}^{2}}{6}\\ & & \frac{6}{5L}& \frac{-1}{10}+\frac{{\varphi}_{z}}{2}\\ & & & \frac{2L}{15}+\frac{\beamLength{\varphi}_{z}}{6}+\frac{\beamLength{\varphi}_{z}^{2}}{3}\end{array}\right)\end{array}\)
Dans le modèle de poutre d’Euler-Bernoulli , les effets de cisaillement transverse sont négligés. Il suffit donc, pour obtenir les matrices de masse et de rigidité associées à ce modèle, d’annuler les variables \({\varphi}_{y}\) et \({\varphi}_{z}\) contenues dans les matrices de masse et de rigidité du modèle de Timoshenko. (\({\varphi}_{y}\) et \({\varphi}_{z}\) font intervenir les coefficients de forme \({k}_{y}\) et \({k}_{z}\) , inverses des coefficients de cisaillement \({A}_{Y}\) et \({A}_{Z}\) ).
On notera que dans le modèle Euler-Bernoulli programmé dans Aster, l’inertie de rotation est également négligée. Il faut donc, pour ce modèle, annuler les termes en \(\rho {I}_{z}\) et \(\rho {I}_{y}\) dans la matrice de masse du modèle de Timoshenko.
Matrice de masse réduite par la technique des masses concentrées#
La matrice de masse est ainsi réduite à une matrice diagonale et s’obtient par l’option ’MASS_MEGA_DIAG’ de l’opérateur CALC_MATR_ELEM.
L’élément poutre est considéré à section constante \(S\) et à masse volumique constante \(\rho\).
La technique dite de “Lumping” consiste à sommer sur la diagonale tous les termes de la ligne de la matrice cohérente et d’annuler tous les termes extra-diagonaux.
En ce qui concerne la composante diagonale liée au mouvement de traction‑compression \(({M}_{11})\) et celle liée au mouvement de torsion \(({M}_{44})\) , nous avons:
avec \({I}_{y},{I}_{z}\) : moments géométriques
On peut considérer que ces composantes ont été obtenues en partageant l’élément de poutre en deux parts égales de longueur \(\frac{\beamLength}{2}\) puis en associant la masse et l’inertie obtenues au nœud du demi‑élément. Pour , \({M}_{44}\) l’expression précédente correspond à un choix: on aurait également pu écrire: \({M}_{44}=\rho C\frac{\beamLength}{2}\) .
Note
Comparaison avec les méthodes d’intégration numérique
On peut noter que si l’on effectue une intégration approchée de la manière suivante:
\({\int}_{e}f=\sum_{\text{i=1,n}}\frac{\text{mes}(e)}{n}\text{f}({a}_{i}^{e})\)
(\({a}_{i}^{e}\) : nœuds \(i\) de l’élément \(e\) , \(n\) : nombre de nœuds de l’élément)
on obtient un résultat identique (pour une poutre:* \(\mathrm{mes}(e)=\beamLength\) et \(n=2\)).
Les composantes diagonales liées aux mouvements de flexion qui sont programmées sont:
On retrouve bien les composantes \({M}_{22}\) et \({M}_{33}\) liées aux translations des mouvements de flexion par la technique des masses concentrées aux nœuds.
Matrice de raideur centrifuge#
La matrice de raideur centrifuge résulte d’un chargement rotation caractérisé par le vecteur vitesse \(\omega ={}^{t}(\begin{array}{ccc}{\omega}_{x}& {\omega}_{y}& {\omega}_{z}\end{array})\) . On pose \(u={}^{t}(\begin{array}{ccc}{u}_{x}& {u}_{y}& {u}_{z}\end{array})\) le vecteur déplacement.
Son expression est \({K}_{\omega}(u)=-(\frac{1}{2}){\int}_{V}\rho ((\omega \wedge u)\cdot (\omega \wedge u))\mathrm{dV}\)
On peut écrire: \({K}_{\omega}(u)=-(\frac{1}{2}){\int}_{V}\rho (({u}^{t}{\Omega}^{t})\cdot (\Omega u))\mathrm{dV}\) avec \(\Omega =\left(\begin{array}{ccc}0& -{\omega}_{z}& {\omega}_{y}\\ {\omega}_{z}& 0& -{\omega}_{x}\\ -{\omega}_{y}& {\omega}_{x}& 0\end{array}\right)\)
En décomposant les déplacements suivant les fonctions de forme \(({N}_{i},i=1,2),({\xi}_{i}^{y},{\xi}_{i}^{z},i=1,4)\) définies précédemment, il vient: \(u=\mathrm{Nq}\) où \(q\) désigne l’ensemble des degrés de libertés des 2 nœuds de la poutre. Sur un élément \({V}_{e}\) la matrice élémentaire \({K}_{e}\) s’écrit:
Pour avoir une matrice de raideur centrifuge cohérente avec la matrice de rigidité et la matrice de masse cohérente, u est discrétisé sur la base des fonctions tests introduites pour le calcul de la matrice de rigidité, soit:
On en déduit aisément la matrice \(N\) :
Les matrices étant creuses, on peut expliciter facilement le produit \(({N}^{t}{\Omega}^{t})\cdot (\Omega N)\)
C’est une matrice \((12,12)\) symétrique constituée des blocs suivants:
Il reste à intégrer cette matrice sur un élément poutre de longueur beamLength.
Les coefficients \({\varphi}_{y}\) et \({\varphi}_{z}\) étant définis en 4.3.1 et 4.3.2, pour \(k=y,z\) , on a:
On remarque que les intégrales \({\int}_{0}^{\beamLength}{({\xi}_{i}^{k})}^{2}\mathit{dx},k=y,z\) se déduisent des intégrales \({\int}_{0}^{\beamLength}{\xi}_{i}^{y}{\xi}_{i}^{z}\mathit{dx}\) en faisant \(y=z\) .
Il reste donc à calculer les 16 intégrales \({\int}_{0}^{\beamLength}{\xi}_{i}^{y}{\xi}_{j}^{z}\mathrm{dx}\) , qui ne sont pas a priori symétriques en y et z (en fait, certaines le sont).
Poutres droites particulières#
Il s’agit dans ce chapitre de prendre en compte des poutres droites dont la section a des propriétés qui ont été ignorées jusqu’à présent, en particulier les poutres ayant un centre de torsion excentré par rapport à l’axe neutre (la section ne possède pas 2 axes de symétrie), et celles dont la section évolue continûment sur leur axe.
Excentrement de l’axe de torsion par rapport à l’axe neutre#
Le centre de torsion est le point qui reste fixe lorsque la section est soumise au seul moment de torsion. Il est aussi appelé centre de cisaillement car un effort appliqué en ce point ne produit pas de rotation \({\theta}_{x}\)
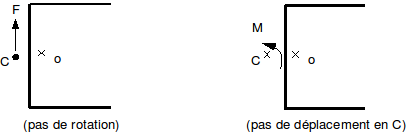
Figure 5.1-a: Section avec centre de torsion.
Au point \(C\) , les effets de flexion et de torsion sont découplés, on peut donc utiliser les résultats établis au chapitre précédent. On retrouve les composantes du déplacement au point \(O\) en considérant la relation de corps rigide:
\(\overrightarrow{u}(O)=\overrightarrow{u}(C)+\overrightarrow{\mathrm{OC}}\wedge \overrightarrow{\Omega}\)
avec \(\Omega =(\begin{array}{c}{\theta}_{x}\\ 0\\ 0\end{array})\) vecteur rotation et \(\overrightarrow{\mathrm{OC}}=(\begin{array}{c}0\\ {e}_{y}\\ {e}_{z}\end{array})\) la position du centre de torsion dans le repère local de la poutre. De fait, on obtient:
\(\lbrace \begin{array}{c}{u}_{x}={u}_{{x}_{c}}\\ {u}_{y}={u}_{{y}_{c}}+{e}_{z}{\theta}_{x}\\ {u}_{z}={u}_{{z}_{c}}-{e}_{y}{\theta}_{x}\end{array}\) [5.1-1]
Le changement de variables donné par [éq] s’écrit matriciellement:
\((\begin{array}{c}{u}_{{x}_{{c}_{1}}}\\ {u}_{{y}_{{c}_{1}}}\\ {u}_{{z}_{{c}_{1}}}\\ {\theta}_{{x}_{{c}_{1}}}\\ {\theta}_{{y}_{{c}_{1}}}\\ {\theta}_{{z}_{{c}_{1}}}\\ {u}_{{x}_{{c}_{2}}}\\ {u}_{{y}_{{c}_{2}}}\\ {u}_{{z}_{{c}_{2}}}\\ {\theta}_{{x}_{{c}_{2}}}\\ {\theta}_{{y}_{{c}_{2}}}\\ {\theta}_{{z}_{{c}_{2}}}\end{array})=(\begin{array}{cccccccccccc}1& 0& 0& 0& 0& 0& & & & & & \\ 0& 1& 0& -{e}_{z}& 0& 0& & & & & & \\ 0& 0& 1& {e}_{y}& 0& 0& & & & 0& & \\ 1& 0& 0& 1& 0& 0& & & & & & \\ 1& 0& 0& 0& 1& 0& & & & & & \\ 1& 0& 0& 0& 0& 1& & & & & & \\ & & & & & & 1& 0& 0& 0& 0& 0\\ & & & & & & 0& 1& 0& -{e}_{z}& 0& 0\\ & & 0& & & & 0& 0& 1& {e}_{y}& 0& 0\\ & & & & & & 0& 0& 0& 1& 0& 0\\ & & & & & & 0& 0& 0& 0& 1& 0\\ & & & & & & 0& 0& 0& 0& 0& 1\end{array})\begin{array}{c}(\begin{array}{c}{u}_{{x}_{{}_{1}}}\\ {u}_{{y}_{{}_{{}_{1}}}}\\ {u}_{{z}_{{}_{1}}}\\ {\theta}_{{x}_{{}_{1}}}\\ {\theta}_{{y}_{{}_{1}}}\\ {\theta}_{{z}_{{}_{1}}}\\ {u}_{{x}_{{}_{2}}}\\ {u}_{{y}_{{}_{2}}}\\ {u}_{{z}_{{}_{2}}}\\ {\theta}_{{x}_{{}_{2}}}\\ {\theta}_{{y}_{{}_{2}}}\\ {\theta}_{{z}_{{}_{2}}}\end{array})\end{array}\)
Il suffit donc de déterminer les matrices élémentaires de masse \(({M}_{c})\) et de raideur \(({K}_{c})\) dans le repère \((C,x,y,z)\) où les mouvements de flexion et de torsion sont découplés puis de se transporter dans le repère lié à l’axe neutre \((O,x,y,z)\) par les transformations suivantes:
\(\begin{array}{}K={P}^{\text{T}}{K}_{c}P\\ \text{et}M={P}^{\text{T}}{M}_{c}P\end{array}\)
Les valeurs de \({e}_{y}\) et \({e}_{z}\) sont à fournir à Code_Aster par l’intermédiaire de l’opérande SECTION:’GENERALE’ de l’opérateur AFFE_CARA_ELEM, les valeurs par défaut étant évidemment des valeurs nulles.
Sections variables#
Il est possible de prendre en compte des sections évolutives de manière continue pour les poutres droites de Timoshenko et d’Euler (POU_D_E et POU_D_T seulement). On distingue deux types de variation de section:
linéaire ou affine,
quadratique ou homothétique.
La distinction entre les deux types se conçoit aisément en prenant l’exemple d’une poutre rectangulaire:
si une seule des dimensions latérales varie, on suppose de façon linéaire, alors l’aire de la section droite varie linéairement, et est donnée par:
\(S(x)={S}_{1}\left[1+(\frac{{S}_{2}}{{S}_{1}}-1)\frac{x}{L}\right]\)
lorsque les deux dimensions latérales varient (de manière linéaire), l’aire de section va évoluer de façon quadratique.
\(S(x)={S}_{1}{\left[1+(\sqrt{\frac{{S}_{2}}{{S}_{1}}}-1)\frac{x}{L}\right]}^{2}\)
Code_Aster permet de traiter des sections ’CERCLE’, ’RECTANGLE’ et ’GENERALE’, mais pour des raisons évidentes de géométrie, tous ces types de section ne peuvent admettre les deux types de variation. Le tableau suivant résume les possibilités existantes.
Section |
Constante |
Linéaire ou Affine |
Quadratique ou Homothétique |
cercle |
oui |
non |
oui |
rectangle |
oui |
oui - selon y |
oui |
générale |
oui |
non |
oui |
Pour la section ’RECTANGLE’, c’est l’utilisateur qui choisit le type de variation, en précisant ’AFFINE’ ou ’HOMOTHÉTIQUE’ dans AFFE_CARA_ELEM. Il faut bien noter que dans le cas ’AFFINE’, les dimensions ne peuvent varier que suivant y.
Dans le cas des sections creuses circulaires, pour que la section soit considérée comme homothétique, il faut que \(\mathit{EP1}/\mathit{R1}=\mathit{EP2}/\mathit{R2}\) . Dans le cas de non respect de l’homothétie la solution donnée par Code_Aster est approchée.
Nous considérons d’une façon générale que la section varie selon la formule [éq]:
\(S(x)={S}_{1}{(1\text{+c}\frac{x}{L})}^{m}\) [5.2-1]
\({S}_{1}\) est la section initiale en \(x=0\)
\(c\) est fixé par la connaissance de la section finale \({S}_{2}\) en \(x=L\) .
\(m\) donne le degré de variation: \(m=1\) variation linéaire, \(m=2\) variation quadratique.
La section variant, il en va de même des inerties \({I}_{y}(x)\) , \({I}_{z}(x)\) et \({I}_{p}(x)\) .
Nous aurons donc:
\({I}_{y}(x)={I}_{{y}_{1}}{(1\text{+c}\frac{x}{L})}^{\text{m+}2}\) [5.2-2]
\({I}_{z}(x)={I}_{{z}_{1}}{(1\text{+c}\frac{x}{L})}^{\text{m+}2}\) [5.2-3]
\({I}_{p}(x)={I}_{{p}_{1}}{(1\text{+c}\frac{x}{L})}^{\text{m+}2}\) [5.2-4]
\(c\) est déterminé pour chaque formule à partir de la valeur pour \({\text{x = L : I}}_{{y}_{2}}{\text{, I}}_{{z}_{2}}{\text{, I}}_{{p}_{2}}\) .
Les modules d’Young \((E)\) et de Coulomb \((G)\) sont supposés constants.
Le principe adopté par Code_Aster consiste à calculer des caractéristiques de section équivalentes, constantes sur la poutre, à partir des caractéristiques réelles données aux deux extrémités. Ces caractéristiques équivalentes dépendent donc du phénomène auquel elles contribuent, en particulier, sont distinctes pour les effets de rigidité ou d’inertie.
Calcul de la matrice de rigidité#
Détermination de la section équivalente (\({S}_{\mathrm{eq}}\))#
La détermination de la section équivalente n’utilise ni la méthode prise au [§ Détermination de la matrice de rigidité] pour obtenir la matrice de rigidité exacte ni une approximation de la solution par une fonction polynomiale comme décrit au [§ Détermination de la matrice de masse ]. En fait, la méthode employée s’écarte de la méthode des éléments finis et même de la méthode de Galerkin, elle consiste à effectuer une résolution du problème de la poutre à section variable sans efforts répartis imposés, ce qui permet d’expliciter les efforts aux extrémités en fonction des déplacements. Cette méthode est “cohérente” avec celle du [§ Détermination de la matrice de rigidité] car les fonctions tests définies en [§ Détermination de la matrice de rigidité] valent 1 ou 0 sur les extrémités de la poutre, donc [éq] les forces nodales peuvent être “assimilées” à des efforts.
Par ailleurs, cette méthode permet d’obtenir des résultats exacts pour le problème statique sans force répartie et conduit comme nous le verrons à une valeur \({S}_{\mathrm{eq}}\) comprise entre \({S}_{1}\) et \({S}_{2}\) qui, dans le cas général, garantit la convergence de la solution approximée vers la solution exacte (sans toutefois connaître l’ordre de convergence).
La section de la poutre étant variable, l’équation de traction-compression en statique sans effort réparti imposé s’écrit:
\(\frac{\partial}{\partial x}\left[ES(x)\frac{\partial u}{\partial x}\right]=0\) [5.2.1.1-1]
avec \(N(x)=ES(x)\frac{\partial u}{\partial x}\)
Nous déterminons la matrice de rigidité dans le cas général [éq], nous en déduisons par la suite les valeurs des sections équivalentes pour les cas \(m=1\) (progression linéaire) et \(m=2\) (progression quadratique).
En intégrant [éq], nous avons:
\(\text{E S}(x)\frac{\partial u}{\partial x}={C}_{1}\)
ou, en tenant compte de l’expression de \(S(x)\) :
\(E{S}_{1}{(1\text{+c}\frac{x}{L})}^{m}\frac{\partial u}{\partial x}={C}_{1}\)
La constante d’intégration est déterminée à partir des valeurs de forces axiales aux nœuds.
Nous intégrons une nouvelle fois de façon à obtenir les efforts aux nœuds en fonction des déplacements \(u(0)={u}_{1}\) et \(u(L)={u}_{2}\) :
\(\frac{\partial u}{\partial x}=\frac{{C}_{1}}{E{S}_{1}}{(1\text{+c}\frac{x}{L})}^{-m}\)
d’où \(\text{u}(x)=\frac{{C}_{1}}{E{S}_{1}}\frac{L}{c}\ln(1\text{+c}\frac{x}{L}){\text{+C}}_{2}\text{}\) si \(m=1\)
et \(u(x)=\frac{{C}_{1}}{E{S}_{1}}\frac{L}{c}\frac{1}{(l-m){(1+c\frac{x}{L})}^{m-1}}+{C}_{2}\) si \(m\ge 2\)
On constate que l’expression de \(u(x)\) est loin d’être polynomiale.
En tenant compte du fait que:
\({C}_{1}=-{N}_{1}\) pour \(x=0\)
\({C}_{1}=+{N}_{2}\) pour \(x=L\)
et que:
\({C}_{2}=\frac{{(1\text{+c})}^{-m+1}\text{u}(0)-u(L)}{{(1\text{+c})}^{-m+1}-1}\)
Nous obtenons:
pour \(m=1\) , \(\lbrace \begin{array}{c}{N}_{1}=\frac{E{S}_{1}\text{c}}{\text{L}\ln(1+c)}({u}_{1}-{u}_{2})\\ {N}_{2}=\frac{E{S}_{1}\text{c}}{\text{L}\ln(1+c)}({u}_{2}-{u}_{1})\end{array}\)
et pour \(m=2\) , \(\lbrace \begin{array}{c}{N}_{1}=\frac{E{S}_{1}\text{c}\left(1-m\right)}{L}\text{}\left[-{u}_{1}\left(\frac{{\left(1+c\right)}^{m-1}}{1-{\left(1+c\right)}^{m-1}}\right)+{u}_{2}\left(\frac{{\left(1+c\right)}^{m-1}}{1-{\left(1+c\right)}^{m-1}}\right)\right]\text{}\\ {N}_{2}=\frac{E{S}_{1}\text{c}\left(1-m\right)}{L}\text{}\left[{u}_{1}\left(\frac{{\left(1+c\right)}^{m-1}}{1-{\left(1+c\right)}^{m-1}}\right)-{u}_{2}\left(\frac{{\left(1+c\right)}^{m-1}}{1-{\left(1+c\right)}^{m-1}}\right)\right]\end{array}\)
En remplaçant \(c\) par sa valeur, soit:
si \(m=1\) ,
\(\begin{array}{c}c=\frac{{S}_{2}}{{S}_{1}}-1,\\ \text{}{N}_{1}=\frac{E}{L}\frac{\left({S}_{2}-{S}_{1}\right)}{\ln{\text{S}}_{2}-\ln{\text{S}}_{1}}\left({u}_{1}-{u}_{2}\right)\\ \text{}{N}_{2}=\frac{E}{L}\frac{\left({S}_{2}-{S}_{1}\right)}{\ln{\text{S}}_{2}-\ln{\text{S}}_{1}}\left({u}_{2}-{u}_{1}\right)\end{array}\)
si \(m=2\) ,
\(\begin{array}{c}\text{}\text{c}=\sqrt{\frac{{S}_{2}}{{S}_{1}}}-1\\ {\text{N}}_{1}=\frac{E}{L}\sqrt{{S}_{1}{\text{S}}_{2}}\left({u}_{1}-{u}_{2}\right)\\ {\text{N}}_{2}=\frac{E}{L}\sqrt{{S}_{1}{\text{S}}_{2}}\left({u}_{2}-{u}_{1}\right)\end{array}\)
Nous constatons que les matrices de rigidité, dans les deux cas traités, auront la même forme que pour une section constante si on prend comme section équivalente:
\({S}_{\text{eq}}=\frac{({S}_{2}-{S}_{1})}{\ln{S}_{2}-\ln{\text{S}}_{1}}\) pour une section variant linéairement
\({S}_{\text{eq}}=\sqrt{{S}_{1}{S}_{2}}\) pour une section variant de façon quadratique
Détermination d’une constante de torsion équivalente (Ceq)#
L’équation de torsion pure d’une poutre avec section variable, s’écrit:
\(\frac{\partial}{\partial x}(\text{G C}(x)\frac{\partial {q}_{x}}{\partial x})=0\) [5.2.1.2-1]
avec \(C(x)={C}_{1}{(1+\text{c}\frac{x}{L})}^{m+2}\) (\(m=1\) ou \(2\) )
La méthode est la même que pour le calcul de la section équivalente: il s’agit d’intégrer l’équation précédente de façon à obtenir les efforts (couples de torsion \({\Gamma}_{{x}_{1}},{\Gamma}_{{x}_{2}}\) ) en fonction des déplacements aux nœuds \(({\theta}_{{x}_{1}},{\theta}_{{x}_{2}})\) et d’en déduire, par comparaison avec les formules à section constante, l’expression d’un moment géométrique polaire équivalent.
Par intégration de [éq], nous avons:
\({\text{G C}}_{1}{(1+c\frac{x}{L})}^{m+2}\frac{\partial {\theta}_{x}}{\partial x}={D}_{1}\) ,
\({D}_{1}\) la constante d’intégration est déterminée par les couples de torsion appliqués aux nœuds.
De: |
\(\frac{\partial {\theta}_{x}}{\partial x}=\frac{{D}_{1}}{{\text{G C}}_{1}}{(1+c\frac{x}{L})}^{-(m+2)},\) |
Nous déduisons: |
\({\theta}_{x}(x)=\frac{{D}_{1}}{{\text{G C}}_{1}}\frac{-L}{\text{c}(\text{m+}1)}{(1+c\frac{x}{L})}^{-(m+1)}+{D}_{2}\) |
Nous déterminons \({D}_{2}\) à partir du système:
\(\lbrace \begin{array}{c}{\theta}_{{x}_{1}}=\frac{-{D}_{1}L}{{\mathrm{GC}}_{1}c(m+1)}+{D}_{2}\\ {\theta}_{{x}_{2}}=\frac{-{D}_{1}L}{{\mathrm{GC}}_{1}c(m+1)}{(1+c)}^{-(m+1)}+{D}_{2}\end{array}\)
soit: \({D}_{2}=\frac{{\theta}_{{x}_{1}}{(1+c)}^{-(m+1)}+c{\theta}_{{x}_{2}}}{{(1+c)}^{-(m+1)}-1}\)
En tenant compte du fait que:
\({D}_{1}=-{\Gamma}_{1}\) pour \(x=0\)
\({D}_{1}={\Gamma}_{2}\) pour \(x=L\)
nous avons finalement:
pour \(m=1\) ,
\(\begin{array}{}\lbrace \begin{array}{c}{\Gamma}_{1}=\frac{G}{L}\frac{2({C}_{2}{C}_{1}^{\frac{2}{3}}-{C}_{1}{C}_{2}^{\frac{2}{3}})}{({C}_{2}^{\frac{2}{3}}-{C}_{1}^{\frac{2}{3}})}({\theta}_{{x}_{1}}-{\theta}_{{x}_{2}})\\ {\Gamma}_{2}=\frac{G}{L}\frac{2({C}_{2}{C}_{1}^{\frac{2}{3}}-{C}_{1}{C}_{2}^{\frac{2}{3}})}{({C}_{2}^{\frac{2}{3}}-{C}_{1}^{\frac{2}{3}})}({\theta}_{{x}_{2}}-{\theta}_{{x}_{1}})\end{array}\end{array}\)
Nous prenons donc dans le cas d’une section variant linéairement, un moment géométrique polaire équivalent \({C}_{\mathrm{eq}}\) de la forme suivante:
\({C}_{\text{eq}}=\frac{2({C}_{2}{C}_{1}^{\frac{2}{3}}-{C}_{1}{C}_{2}^{\frac{2}{3}})}{({C}_{2}^{\frac{2}{3}}-{C}_{1}^{\frac{2}{3}})}\) variation linéaire
pour \(m=2\) ,
\(\lbrace \begin{array}{}{\Gamma}_{1}=\frac{G}{L}\frac{3({C}_{2}{C}_{1}^{\frac{3}{4}}-{C}_{1}{C}_{2}^{\frac{3}{4}})}{({C}_{2}^{\frac{3}{4}}-{C}_{1}^{\frac{3}{4}})}({\theta}_{{x}_{1}}-{\theta}_{{x}_{2}})\\ {\Gamma}_{2}=\frac{G}{L}\frac{3({C}_{2}{C}_{1}^{\frac{3}{4}}-{C}_{1}{C}_{2}^{\frac{3}{4}})}{({C}_{2}^{\frac{3}{4}}-{C}_{1}^{\frac{3}{4}})}({\theta}_{{x}_{2}}-{\theta}_{{x}_{1}})\end{array}\)
Dans le cas d’une section variant de façon quadratique, le moment géométrique polaire s’écrit:
\({C}_{\text{eq}}=\frac{3({C}_{2}{C}_{1}^{\frac{3}{4}}-{C}_{1}{C}_{2}^{\frac{3}{4}})}{({C}_{2}^{\frac{3}{4}}-{C}_{1}^{\frac{3}{4}})}\) variation quadratique
Détermination des moments géométriques équivalents#
En fait, il ne semble pas possible de trouver, comme nous l’avons fait pour la section ou le moment géométrique polaire, de moments géométriques équivalents \(({I}_{{y}_{\text{eq}}}\text{et}{I}_{{z}_{\text{eq}}})\) qui viendraient se substituer aux moments géométriques \(({I}_{y}\text{et}{I}_{z})\) dans l’expression des termes de la matrice de rigidité.
Nous exposons ici la méthode proposée par J.R.BANERJEE et F.W.WILLIAMS [bib 3] qui explicitent la matrice de rigidité dans le cas d’un mouvement de flexion d’une poutre Euler‑Bernoulli à section variable (linéaire ou quadratique).
Les résultats correspondent à ceux programmés dans Code_Aster pour une poutre de type Euler‑Bernoulli à section variable (linéaire ou quadratique). Par extension, la même démarche y est appliquée pour les poutres de type Timoshenko. Les résultats ne sont pas détaillés ici.
Considérons la flexion dans le plan \((xoy)\) .
Partant de l’équation statique du mouvement de flexion d’une poutre de type Euler‑Bernoulli:
\(\frac{{\partial}^{2}}{\partial {x}^{2}}\left[{\text{EI}}_{z}(x)\frac{{\partial}^{2}v}{\partial {x}^{2}}\right]=0\text{}\) , et \({\theta}_{z}=\frac{\partial v}{\partial x}\)
\(v(x)\) est exprimé en fonction de quatre constantes d’intégration \(({C}_{1},{C}_{2},{C}_{3},{C}_{4})\) . Ces constantes sont déterminées par les valeurs des déplacements aux nœuds:
\(\begin{array}{}v(o)={v}_{1}\text{}\text{}\text{v}(L)={v}_{2}\\ {\theta}_{z}(o)={\theta}_{{z}_{1}}{\theta}_{z}(L)={\theta}_{{z}_{2}}\end{array}\)
soit: \((\begin{array}{c}{v}_{1}\\ {\theta}_{{z}_{1}}\\ {v}_{2}\\ {\theta}_{{z}_{2}}\end{array})=\text{B}(\begin{array}{c}{C}_{1}\\ {C}_{2}\\ {C}_{3}\\ {C}_{4}\end{array})\) , \(B\) matrice \((4\times 4)\) .
Les efforts: \({V}_{y}(x)=\frac{\partial}{\partial x}\left[{\text{EI}}_{z}(x)\frac{{\partial}^{2}v}{\partial {x}^{2}}\right]\)
et les moments: \({M}_{z}(x)={\text{EI}}_{z}(x)\text{}\frac{{\partial}^{2}v}{\partial {x}^{2}}\) ,
s’expriment également en fonction de ces constantes d’intégration, et on peut écrire:
\((\begin{array}{c}{T}_{{y}_{1}}\\ {M}_{{z}_{1}}\\ {T}_{{y}_{2}}\\ {M}_{{z}_{2}}\end{array})=D(\begin{array}{c}{C}_{1}\\ {C}_{2}\\ {C}_{3}\\ {C}_{4}\end{array})\) , \(D\) matrice \((4\times 4)\) .
La matrice de rigidité correspond au produit \({\mathrm{DB}}^{-1}\) . Les termes de cette matrice sont explicités dans les tableaux suivants.
Rappelons que \({I}_{z}(x)={I}_{{z}_{1}}{(1+\text{c}\frac{x}{L})}^{m+2}\) , \(m=1\) ou \(2\) ,
Posons \({\text{W}}_{1}={\text{EI}}_{{z}_{1}}\frac{c}{L}{\text{, W}}_{2}={\text{EI}}_{{z}_{1}}{(\frac{c}{L})}^{2}{\text{, W}}_{3}={\text{EI}}_{{z}_{1}}{(\frac{c}{L})}^{3}.\)
Variation afiine |
Variation quadratique |
|
\(m=1\) |
\(m=2\) |
|
\(c={(\frac{{I}_{2}}{{I}_{1}})}^{\frac{1}{3}}-1\) |
\(c={(\frac{{I}_{2}}{{I}_{1}})}^{\frac{1}{4}}-1\) |
|
\({\Phi}_{1}\) |
\(c+2\) |
\(4(\mathrm{c²}+3c+3)\) |
\({\Phi}_{2}\) |
\(c\) |
\(2c(c+3)\) |
\({\Phi}_{3}\) |
\(c(c+1)\) |
\(2c(c+1)(2c+3)\) |
\({\Phi}_{4}\) |
\(2c(c+1)(2c+3)\) |
\(4\mathrm{c²}\) |
\({\Phi}_{5}=c{\Phi}_{2}-{\Phi}_{4}\) |
\(2\mathrm{c²}(c+1)\) |
|
\({\Phi}_{6}=c{\Phi}_{3}-{\Phi}_{5}\) |
\(4\mathrm{c²}(c+1)\) |
|
\(\Delta\) |
\((c+2)\ln(c+1)-2c\) |
\(\frac{{c}^{3}}{(c+1)}\) |
La matrice \(K\) s’écrit alors:
\(\mathrm{K}=\frac{1}{\Delta}\text{}\left(\begin{array}{cccc}{W}_{3}{\Phi}_{1}& {W}_{2}{\Phi}_{2}& -{W}_{3}{\Phi}_{1}& {W}_{2}{\Phi}_{3}\\ & {W}_{1}{\Phi}_{4}& -{W}_{2}{\Phi}_{2}& +{W}_{1}{\Phi}_{5}\\ \text{Sym}& & {W}_{3}{\Phi}_{1}& -{W}_{2}{\Phi}_{3}\\ & & & {W}_{1}{\Phi}_{6}\end{array}\right)\)
Considérons maintenant la flexion dans le plan \((xOz)\) .
Pour les sections à variation quadratique, la démarche est identique. Mais elle diffère pour les sections à variation linéaire (suivant \(y\) uniquement).
On calcule les termes de la matrice de rigidité correspondant à la flexion dans le plan \((\mathrm{0, }x,z)\) par les valeurs données dans le tableau suivant.
Variation affine: flexion dans le plan \((0,x,z)\) |
|
\(c=(\frac{{I}_{2}}{{I}_{1}})-1\) |
|
\({\Phi}_{1}\) |
\(2\frac{\ln(c+1)}{c}\) |
\({\Phi}_{2}\) |
\(2-{\Phi}_{1}\) |
\({\Phi}_{3}\) |
\((c+1){\Phi}_{1}-2\) |
\({\Phi}_{4}\) |
\({\Phi}_{1}+c-2\) |
\({\Phi}_{6}=c{\Phi}_{3}-{\Phi}_{5}\) |
|
\(\Delta\) |
\((c+2)\ln(c+1)-2c\) |
Dans le cas des poutres de Timoshenko, pour les coefficients de cisaillement, on applique à la section réduite \(k\cdot S\) les relations utilisées pour la section, à savoir:
\(\begin{array}{c}{({k}_{y}S)}_{\mathrm{eq}}=\frac{({k}_{{y}_{2}}{S}_{2}-{k}_{{y}_{1}}{S}_{1})}{\ln({k}_{{y}_{2}}{S}_{2})-\ln({k}_{{y}_{1}}{S}_{1})}\\ {({k}_{z}S)}_{\mathrm{eq}}=\frac{({k}_{{z}_{2}}{S}_{2}-{k}_{{z}_{1}}{S}_{1})}{\ln({k}_{{z}_{2}}{S}_{2})-\ln({k}_{{z}_{1}}{S}_{1})}\end{array}\rbrace\) si la variation est affine,
\(\begin{array}{}\begin{array}{c}{({k}_{y}\text{S})}_{\text{eq}}=\sqrt{{S}_{1}{\text{S}}_{2}{k}_{{y}_{1}}{k}_{{y}_{2}}}\\ {({k}_{z}\text{S})}_{\text{eq}}=\sqrt{{S}_{1}{\text{S}}_{2}{k}_{{z}_{1}}{k}_{{z}_{2}}}\end{array}\rbrace \end{array}\) si la variation est quadratique,
et on introduit les termes supplémentaires dans \(K\) de la même façon que pour une section constante. Les calculs ne sont pas détaillés ici. On obtient une matrice \(K\) de même forme que précédemment avec pour principale modification la valeur de \(\Delta\) :
variation affine:
\(\Delta =(c+2)\ln(c+1)-\mathrm{2c}+\frac{{\Phi}^{2}}{12}{c}^{3}(c+2)\)
variation quadratique:
\(\Delta =\frac{{c}^{3}}{c+1}+\frac{{\Phi}^{2}}{3}{c}^{3}({c}^{2}+\mathrm{3c}+3)\)
Calcul de la matrice de masse#
Par la méthode des masses équivalentes#
Des valeurs « moyennes » sont calculées pour la section, la section réduite, et les moments, à savoir:
\(S=\frac{{S}_{1}{\text{+S}}_{2}}{2}\text{}\) |
si la variation est affine |
\(S=\frac{1}{L}{\int}_{0}^{L}S(x)\text{dx}=\frac{{S}_{1}{\text{+S}}_{2}+\sqrt{{S}_{1}{\text{S}}_{2}}}{3}\) |
si la variation est quadratique |
\(\begin{array}{c}{I}_{y}=\frac{{I}_{{y}_{1}}+{I}_{{y}_{2}}}{2}\\ {I}_{z}=\frac{{I}_{{z}_{1}}+{I}_{{z}_{2}}}{2}\\ {I}_{{\theta}_{x}}=\rho \frac{{I}_{{y}_{1}}+{I}_{{y}_{2}}+{I}_{{z}_{1}}+{I}_{{z}_{2}}}{2}\end{array}\rbrace\) |
quelle que soit la variation |
La matrice de masse est ensuite calculée comme celle d’une poutre ayant ces caractéristiques.
Par la méthode des masses concentrés (matrice diagonale)#
Si la section varie de façon affine, les matrices programmées correspondent, en ce qui concerne les mouvements de traction-compression et de torsion, à celles des poutres à section constante, en utilisant des sections et inerties de torsion équivalentes:
◦ pour la traction compression:
\(\rho L\left(\begin{array}{cc}\frac{{\mathrm{3S}}_{1}+{S}_{2}}{8}& 0\\ 0& \frac{{\mathrm{3S}}_{2}+{S}_{1}}{8}\end{array}\right)\)
◦ pour la torsion:
\(\rho \frac{L\left({I}_{{y}_{1}}+{I}_{{z}_{1}}+{I}_{{y}_{2}}+{I}_{{z}_{2}}\right)}{4}\left(\begin{array}{cc}1& 0\\ 0& 1\end{array}\right)\left(\begin{array}{c}{\theta}_{{x}_{1}}\\ {\theta}_{{x}_{2}}\end{array}\right)\)
◦ pour les mouvements de flexion:
\(\left(\begin{array}{cccc}\frac{\rho {S}_{1}L}{2}& & & \\ & {M}_{5,5}\left({M}_{6,6}\right)& & 0\\ & & \frac{\rho {S}_{2}L}{2}& \\ & 0& & \\ & & & {M}_{11,11}\left({M}_{12,12}\right)\end{array}\right)\left(\begin{array}{c}\begin{array}{c}{v}_{1}\left({w}_{1}\right)\\ \end{array}\\ \begin{array}{c}{\theta}_{{z}_{1}}\left({\theta}_{{y}_{1}}\right)\\ \end{array}\\ \begin{array}{c}{v}_{2}\left({w}_{2}\right)\\ \end{array}\\ \begin{array}{c}{\theta}_{{z}_{2}}\left({\theta}_{{y}_{2}}\right)\\ \end{array}\end{array}\right)\)
avec \({M}_{5,5}={M}_{11.11}=\min\left(\frac{\rho {S}_{\mathit{eq}}{L}^{3}}{105},\frac{\rho {S}_{\mathit{eq}}{L}^{2}}{48}\right)+\frac{\rho L}{15}\left({I}_{{y}_{1}}+{I}_{{y}_{1}}\right)\)
\({M}_{6,6}={M}_{12,12}=\min\left(\frac{\rho {S}_{\mathit{eq}}{L}^{3}}{105},\frac{\rho {S}_{\mathit{eq}}{L}^{2}}{48}\right)+\frac{\rho L}{15}\left({I}_{{z}_{1}}+{I}_{{z}_{1}}\right)\) avec \({S}_{\mathit{eq}}=\left(\frac{{S}_{1}+{S}_{2}}{2}\right)\)
Si la section varie de façon homothétique, les matrices sont programmées, pour les différents mouvements, de la façon suivante:
◦ pour la traction-compression:
\((\begin{array}{cc}\rho \frac{(5{S}_{1}+{S}_{2})}{12}L& 0\\ 0& \rho \frac{({S}_{1}+5{S}_{2})}{12}L\end{array})(\begin{array}{c}\begin{array}{}{u}_{1}\\ \end{array}\\ \begin{array}{}{u}_{2}\\ \end{array}\end{array})\)
◦ pour la torsion:
\(\rho L\frac{({I}_{{y}_{1}}+{I}_{{y}_{2}}+{I}_{{z}_{1}}+{I}_{{z}_{2}})}{4}(\begin{array}{cc}1& 0\\ 0& 1\end{array})(\begin{array}{c}{\theta}_{{x}_{1}}\\ {\theta}_{{x}_{2}}\end{array})\)
◦ pour la flexion dans chacun des deux plans:
\(\left(\begin{array}{cccc}\rho \frac{\left(5{S}_{1}+{S}_{2}\right)}{12}L& & & \\ & {M}_{5,5}\left({M}_{6,6}\right)& & 0\\ & & \rho \frac{\left({S}_{1}+5{S}_{2}\right)}{12}L& \\ & & & {M}_{11,11}\left({M}_{12,12}\right)\end{array}\right)\left(\begin{array}{c}\begin{array}{c}{v}_{1}\left({w}_{1}\right)\\ \end{array}\\ \begin{array}{c}{\theta}_{{z}_{1}}\left({\theta}_{{y}_{1}}\right)\\ \end{array}\\ \begin{array}{c}{v}_{2}\left({w}_{2}\right)\\ \end{array}\\ \begin{array}{c}{\theta}_{{z}_{2}}\left({\theta}_{{y}_{2}}\right)\\ \end{array}\end{array}\right)\)
avec \({M}_{5,5}={M}_{11,11}=\min\left[\frac{\rho \left({S}_{1}+{S}_{2}\right)}{2}\frac{{L}^{3}}{105},\frac{\rho \left({S}_{1}+{S}_{2}\right)}{2}\frac{{L}^{3}}{48}\right]+\rho \left({I}_{{y}_{1}}+{I}_{{y}_{2}}\right)\frac{L}{15}\)
et \({M}_{6,6}={M}_{12,12}=\min\left[\frac{\rho \left({S}_{1}+{S}_{2}\right)}{2}\frac{{L}^{3}}{105},\frac{\rho \left({S}_{1}+{S}_{2}\right)}{2}\frac{{L}^{3}}{48}\right]+\rho \left({I}_{{z}_{1}}+{I}_{{z}_{2}}\right)\frac{L}{15}\)
Rigidité géométrique - Structure précontrainte#
Option: « RIGI_MECA_GE »
Dans le cas d’une structure précontrainte, donc soumise à des efforts initiaux (connus et indépendants du temps), on ne peut pas négliger dans l’équation d’équilibre les termes introduits par le changement de géométrie de l’état vierge de contrainte à l’état précontraint [bib].
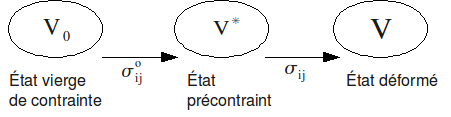
Figure 6-a : Les différents états.
Ce changement de géométrie ne modifie l’équation d’équilibre, dans le cadre de l’hypothèse des petites perturbations (HPP) autour de \({V}_{o}\) (et de \({V}^{\text{*}}\) ), que par l’ajout d’un terme linéaire en les déplacements dont la matrice associée est appelée matrice de rigidité géométrique et qui s’exprime par:
\({W}_{G}=\underset{{V}_{o}}{\int}\frac{\partial {u}_{k}^{\mathrm{3D}}}{\partial {x}_{i}}{\sigma}_{ij}^{o}\frac{\partial {v}_{k}^{\mathrm{3D}}}{\partial {x}_{j}}\text{dV}\)
où \({u}^{\mathrm{3D}}\) est le déplacement (resp. \({v}^{\mathrm{3D}}\) le déplacement virtuel cinématiquement admissible) pris à partir de \({V}^{\text{*}}\) (mais assimilé à \({V}_{o}\) dans le cadre de l’hypothèse des petites perturbations) et \({\sigma}^{o}\) la précontrainte (de Cauchy si l’on veut) puisqu’on est dans le cadre de l’hypothèse des petites perturbations .
\({W}_{G}\) étant une forme bilinéaire symétrique en \({u}^{\mathrm{3D}}\) et \({v}^{\mathrm{3D}}\) , elle peut s’interpréter comme la variation d’un potentiel \({U}_{G}\) .
\({W}_{G}=\delta {U}_{G}\)
On a:
\(2{U}_{G}=\underset{{V}_{o}}{\int}\frac{\partial {u}_{k}^{\mathrm{3D}}}{\partial {x}_{i}}{\sigma}_{ij}^{o}\frac{\partial {u}_{k}^{\mathrm{3D}}}{\partial {x}_{j}}\)
Pour un modèle de poutre 3D, le tenseur de contraintes se réduit dans les axes locaux de la poutre aux composantes \({\sigma}_{xx},{\sigma}_{xy}\text{et}{\sigma}_{xx}\) , d’où:
\(2{U}_{G}=\underset{{V}_{o}}{\int}{\sigma}_{xx}^{o}\frac{\partial {u}_{i}^{\mathrm{3D}}}{\partial x}\frac{\partial {u}_{i}^{\mathrm{3D}}}{\partial x}+2{\sigma}_{xy}^{o}\frac{\partial {u}_{i}^{\mathrm{3D}}}{\partial x}\frac{\partial {u}_{i}^{\mathrm{3D}}}{\partial y}+2{\sigma}_{xz}^{o}\frac{\partial {u}_{i}^{\mathrm{3D}}}{\partial x}\frac{\partial {u}_{i}^{\mathrm{3D}}}{\partial z}\)
Les termes \({(\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial x})}^{2},\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial x}\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial y}\) et \(\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial x}\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial z}\) sont négligés [bib]. De plus, dans le repère local du centre de torsion de la poutre:
\(\lbrace \begin{array}{}{u}_{x}^{\mathrm{3D}}(x,y,z)=u(x)+z{\theta}_{y}(x)-y{\theta}_{z}(x)\\ {u}_{y}^{\mathrm{3D}}(x,y,z)=v(x)-z{\theta}_{x}(x)\\ {u}_{z}^{\mathrm{3D}}(x,y,z)=w(x)+y{\theta}_{x}(x)\end{array}\)
et \(\nabla u=(\begin{array}{ccc}u'+z{\theta}_{y}^{'}-y{\theta}_{z}^{'}& -{\theta}_{z}& {\theta}_{y}\\ v'-z{\theta}_{x}^{'}& 0& -{\theta}_{x}\\ w'+y{\theta}_{x}^{'}& {\theta}_{x}& 0\end{array})\)
d’où l’on tire, d’après l’hypothèse précédente:
\(2{U}_{G}=\underset{{V}_{o}}{\int}{\sigma}_{xx}^{o}\left[{(v'-z{\theta}_{x}^{'})}^{2}+{(w'+y{\theta}_{x}^{'})}^{2}\right]+2{\sigma}_{xy}^{o}(w'+y{\theta}_{x}^{'}){\theta}_{x}+2{\sigma}_{xz}^{o}(v'-z{\theta}_{x}^{'})(-{\theta}_{x})\)
Or, les efforts généralisés sont reliés aux contraintes par les expressions:
\(\begin{array}{ccc}{N}^{o}=\underset{S}{\int}{\sigma}_{xx}^{o}& {V}_{y}=\underset{S}{\int}{\sigma}_{xy}^{o}& {V}_{z}=\underset{S}{\int}{\sigma}_{xz}^{o}\\ & {M}_{y}=\underset{S}{\int}z{\sigma}_{xx}^{o}& {M}_{z}=\underset{S}{\int}-y{\sigma}_{xx}^{o}\end{array}\)
On en déduit:
\(\begin{array}{}2{U}_{G}={\int}_{o}^{L}{N}^{°}({(v')}^{2}+{(w')}^{2})-2{M}_{y}^{o}v'{\theta}_{x}^{'}-2{M}_{z}^{o}w'{\theta}_{x}^{'}+2{V}_{y}^{o}w'{\theta}_{x}-2{V}_{z}^{o}v'{\theta}_{x}\\ +\underset{{V}_{o}}{\int}{\sigma}_{xx}^{o}({y}^{2}+{z}^{2}){({\theta}_{x}^{'})}^{2}+2({\sigma}_{xy}^{o}y+{\sigma}_{xz}^{o}z){\theta}_{x}{\theta}_{x}^{'}\end{array}\)
En supposant, de plus, que \({\sigma}_{xx}^{o}\) est constant dans l’élément discrétisé (ce qui est inexact par exemple pour une poutre verticale soumise à son poids propre) et que \({\theta}_{x}\) varie linéairement par rapport à \(x\) \({\theta}_{x}=(1-\frac{x}{L}){\theta}_{1}+\frac{x}{L}{\theta}_{2}\) , d’où \({\theta}_{x}^{'}\text{=-}\frac{1}{L}{\theta}^{1}+\frac{1}{L}{\theta}^{2}\) , il vient:
\(\underset{{V}_{o}}{\int}{\sigma}_{xx}^{o}({y}^{2}+{z}^{2}){({\theta}_{x}^{'})}^{2}=({\theta}_{1},{\theta}_{2})\left[\begin{array}{c}\frac{{N}^{o}}{L}\frac{{I}_{y}+{I}_{z}}{S}\text{}-\frac{{N}^{o}}{L}\text{}\frac{{I}_{y}+{I}_{z}}{S}\\ -\frac{{N}^{o}}{L}\frac{{I}_{y}+{I}_{z}}{S}\text{}\frac{{N}^{o}}{L}\text{}\frac{{I}_{y}+{I}_{z}}{S}\end{array}\right](\begin{array}{c}{\theta}_{1}\\ \\ {\theta}_{2}\end{array})\)
En négligeant en particulier les termes dûs à l’influence de l’effort tranchant sur le mode de flambage ou de vibration, et en supposant que les charges réparties sont nulles sur un élément, on a:
\(N(x)\) = constante, \({M}_{y}=({M}_{\mathrm{y2}}-{M}_{\mathrm{y1}})\frac{x}{L}+{M}_{\mathrm{y1}}\)
\({V}_{y}(x)\) = constante,
\({V}_{z}(x)\) = constante, \({M}_{z}=({M}_{\mathrm{z2}}-{M}_{\mathrm{z1}})\frac{x}{L}+{M}_{\mathrm{z1}}\)
Sous cette hypothèse et pour le modèle d’Euler-Bernoulli (pour le modèle de Timoshenko, on utilise la même matrice), on obtient la matrice suivante:
\(A=(\begin{array}{cc}{A}_{1}& {A}_{2}\\ 0& {A}_{3}\end{array})\)
Partie triangulaire supérieure de la matrice de rigidité géométrique avec:
\({A}_{1}\) = |
1 \({u}_{1}\) |
2 \({v}_{1}\) |
3 \({w}_{1}\) |
4 \({\theta}_{\mathrm{x1}}\) |
5 \({\theta}_{\mathrm{y1}}\) |
6 \({\theta}_{\mathrm{z1}}\) |
|
1 |
|||||||
2 |
\(1.2\frac{{N}^{o}}{L}\) |
\(-\frac{{M}_{\mathrm{y1}}^{o}}{\mathrm{2L}}-\frac{{M}_{\mathrm{y2}}^{o}}{\mathrm{2L}}+\frac{{V}_{z}^{o}}{2}\) |
\(\frac{{N}^{o}}{10}\) |
||||
3 |
\(1.2\frac{{N}^{o}}{L}\) |
\(-\frac{{M}_{\mathrm{z1}}^{o}}{\mathrm{2L}}-\frac{{M}_{\mathrm{z2}}^{o}}{\mathrm{2L}}-\frac{{V}_{y}^{o}}{2}\) |
\(-\frac{{N}^{o}}{10}\) |
||||
4 |
\(\frac{({I}_{y}+{I}_{z}){N}^{o}}{(SL)}\) |
\(\frac{-{M}_{\mathrm{z1}}^{o}+{M}_{\mathrm{z2}}^{o}}{12}-\frac{L{V}_{y}^{o}}{12}\) |
\(\frac{{M}_{\mathrm{y1}}^{o}-{M}_{\mathrm{y2}}^{o}}{12}-\frac{L{V}_{z}^{o}}{12}\) |
||||
5 |
\(\frac{2L{N}^{o}}{15}\) |
||||||
6 |
\(\frac{2L{N}^{o}}{15}\) |
\({A}_{2}\) = |
7 \({u}_{2}\) |
8 \({v}_{2}\) |
9 \({w}_{2}\) |
10 \({\theta}_{\mathrm{x2}}\) |
11 \({\theta}_{\mathrm{y2}}\) |
12 \({\theta}_{\mathrm{z2}}\) |
|
1 |
|||||||
2 |
\(-1.2\frac{{N}^{o}}{L}\) |
\(\begin{array}{}\frac{{M}_{\mathrm{y1}}^{o}}{2L}+\frac{{M}_{\mathrm{y2}}^{o}}{2L}\\ +\frac{{V}_{z}^{o}}{2}\end{array}\) |
\(\frac{{N}^{o}}{10}\) |
||||
3 |
\(-1.2\frac{{N}^{o}}{L}\) |
\(\begin{array}{}\frac{{M}_{\mathrm{z1}}^{o}}{2L}+\frac{{M}_{\mathrm{z2}}^{o}}{2L}\\ -\frac{{V}_{y}^{o}}{2}\end{array}\) |
\(-\frac{{N}^{o}}{10}\) |
||||
4 |
\(\begin{array}{}\frac{{M}_{\mathrm{y1}}^{o}}{2L}+\frac{{M}_{\mathrm{y2}}^{o}}{2L}\\ -\frac{{V}_{z}^{o}}{2}\end{array}\) |
\(\begin{array}{}\frac{{M}_{\mathrm{z1}}^{o}}{2L}+\frac{{M}_{\mathrm{z2}}^{o}}{2L}\\ +\frac{{V}_{y}^{o}}{2}\end{array}\) |
\(-\frac{({I}_{y}+{I}_{z}){N}^{o}}{(SL)}\) |
\(\begin{array}{c}\frac{\left({M}_{z1}^{o}-{M}_{z2}^{o}\right)}{12}\\ +\frac{L{V}_{y}^{o}}{12}\end{array}\) |
\(\begin{array}{c}\frac{\left(-{M}_{y1}^{o}+{M}_{y2}^{o}\right)}{12}\\ +\frac{L{V}_{z}^{o}}{12}\end{array}\) |
||
5 |
\(\frac{{N}^{o}}{10}\) |
\(\begin{array}{}\frac{({M}_{\mathrm{z1}}^{o}-{M}_{\mathrm{z2}}^{o})}{12}\\ +\frac{L{V}_{y}^{o}}{12}\end{array}\) |
\(-\frac{L{N}^{o}}{30}\) |
||||
6 |
\(-\frac{{N}^{o}}{10}\) |
\(\begin{array}{}\frac{(-{M}_{\mathrm{y1}}^{o}+{M}_{\mathrm{y2}}^{o})}{12}\\ +\frac{L{V}_{y}^{o}}{12}\end{array}\) |
\(-\frac{L{N}^{o}}{30}\) |
\({A}_{3}\) = |
7 \({u}_{2}\) |
8 \({v}_{2}\) |
9 \({w}_{2}\) |
10 \({\theta}_{\mathrm{x2}}\) |
11 \({\theta}_{\mathrm{y2}}\) |
12 \({\theta}_{\mathrm{z2}}\) |
|
7 |
|||||||
8 |
\(1.2\frac{{N}^{o}}{L}\) |
\(\begin{array}{}-\frac{{M}_{\mathrm{y1}}^{o}}{2L}-\frac{{M}_{\mathrm{y2}}^{o}}{2L}\\ -\frac{{V}_{z}^{o}}{2}\end{array}\) |
\(-\frac{{N}^{o}}{10}\) |
||||
9 |
\(1.2\frac{{N}^{o}}{L}\) |
\(\begin{array}{}-\frac{{M}_{\mathrm{z1}}^{o}}{2L}-\frac{{M}_{\mathrm{z2}}^{o}}{2L}\\ +\frac{{V}_{y}^{o}}{2}\end{array}\) |
\(\frac{{N}^{o}}{10}\) |
||||
10 |
\(\frac{({I}_{y}+{I}_{z}){N}^{o}}{SL}\) |
\(\begin{array}{}\frac{(-{M}_{\mathrm{z1}}^{o}+{M}_{\mathrm{z2}}^{o})}{12}\\ -\frac{L{V}_{y}^{o}}{12}\end{array}\) |
\(\begin{array}{}\frac{({M}_{\mathrm{y1}}^{o}-{M}_{\mathrm{y2}}^{o})}{12}\\ -\frac{L{V}_{z}^{o}}{12}\end{array}\) |
||||
11 |
\(\frac{2L{N}^{o}}{15}\) |
||||||
12 |
\(\frac{2L{N}^{o}}{15}\) |
En utilisant les égalités \(\frac{\partial {M}_{y}}{\partial x}-{V}_{z}=0\) et \(\frac{\partial {M}_{z}}{\partial x}+{V}_{y}=0\) , on retrouve la matrice programmée.
De plus, pour pouvoir traiter les problèmes de déversement de poutres minces, sollicitées essentiellement par des moments de flexion et des efforts normaux, il faut ajouter l’hypothèse de rotations modérées en torsion [bib], [bib].
Ceci se traduit par la forme suivante du champ de déplacements:
\(U(x,y,z)=u(x)+z({\theta}_{y}(x)+{\theta}_{x}(x){\theta}_{z}(x))-y({\theta}_{z}(x)-{\theta}_{x}(x){\theta}_{y}(x))\)
D’autre part, si le centre de torsion \(C\) n’est pas confondu avec le centre de gravité, il faut écrire:
\(\lbrace \begin{array}{}V(x,y,z)=v(x,C)-(z-{z}_{C}){\theta}_{x}\\ W(x,y,z)=w(x,C)+(y-{y}_{C}){\theta}_{x}\end{array}\)
Ces deux modifications amènent des termes supplémentaires dans la matrice de rigidité géométrique:
L’hypothèse des rotations modérées conduit à rajouter à \({\mathrm{2U}}_{G}\) le terme:
\({\mathrm{2U}}_{G}^{1}={\int}_{0}^{L}-{M}_{z}^{o}({\theta}_{x}{\theta}_{y}){,}_{x}+{M}_{y}^{o}({\theta}_{x}{\theta}_{z}){,}_{x}+{V}_{y}^{o}{\theta}_{x}{\theta}_{y}+{V}_{z}^{o}{\theta}_{x}{\theta}_{y}\)
Les termes de la matrice \(A\) à ajouter sont:
\(\begin{array}{cc}(4-5):+\frac{{M}_{\mathrm{z1}}^{o}}{2}\text{}& (10-11):-\frac{{M}_{\mathrm{z2}}^{o}}{2}\\ (4-6):-\frac{{M}_{\mathrm{y1}}^{o}}{2}\text{}& (10-12):+\frac{{M}_{\mathrm{y2}}^{o}}{2}\end{array}\)
En ce qui concerne l’excentrement du centre de torsion, il faut ajouter les termes correspondant à:
\(\begin{array}{}{U}_{G}^{2}={N}^{o}{z}_{c}{\int}_{0}^{L}v'{\theta}_{x}^{'}-{N}^{o}{y}_{c}{\int}_{0}^{L}w'{\theta}_{x}^{'}-({y}_{c}{V}_{y}^{o}+{z}_{c}{V}_{z}^{o}){\int}_{0}^{L}{\theta}_{x}{\theta}_{x}^{'}\\ +({y}_{c}{M}_{z}^{o}-{z}_{c}{M}_{y}^{o}){\int}_{0}^{L}{({\theta}_{x}^{'})}^{2}\end{array}\)
De plus, il faut effectuer un changement de repère comme au [§ 5.1 ].
Grands déplacements#
Le traitement des grands déplacements est disponible pour les poutres droites dans Code_Aster . Il est activé par le mot-clé DEFORMATION=’GROT_GDEP’. Cette option permet de prendre en compte la réactualisation de la géométrie à chaque itération. À chaque itération la matrice de rigidité géométrique est actualisée, chapitre 6 , et est ajoutée à la matrice tangente. Cela permet une meilleure convergence des calculs comme cela est expliqué dans [R3.08.09].
Poutre courbe#
Remarque: L’élément de poutre courbe n’existe plus dans Code_Aster.Pour modéliser une poutre courbe, il faut mailler la partie courbe avec suffisamment d’éléments droits: 20 à 40 éléments droits pour un coude de 90° donnent des résultats tout à fait satisfaisant.
Ce chapitre est conservé, car dans la base des cas tests de Code_Aster les structures qui présentent des coudes sont validées et comparées aux solutions théoriques obtenues avec des éléments de poutre courbe issus de la théorie présentée ci-dessous.
Pour calculer la matrice de rigidité pour un élément de poutre courbe, nous faisons le calcul en passant par différentes étapes.
Nous partons des équations d’équilibre qui intégrées vont nous donner une matrice (notée \({J}_{\theta}\) ) permettant de déterminer les efforts en un point de la poutre connaissant les efforts en un autre point. Cette matrice prendra en compte le changement de base local.
Ensuite en écrivant l’énergie potentielle de l’élément et en remarquant le découplage de la flexion dans le plan de l’élément de la flexion hors de ce plan, on détermine les deux matrices de flexibilité.
Enfin les matrices de flexibilité étant calculées, on obtient la matrice de rigidité locale en utilisant le principe de Castigliano, qui doit être recalculée dans la base globale pour être assemblée.
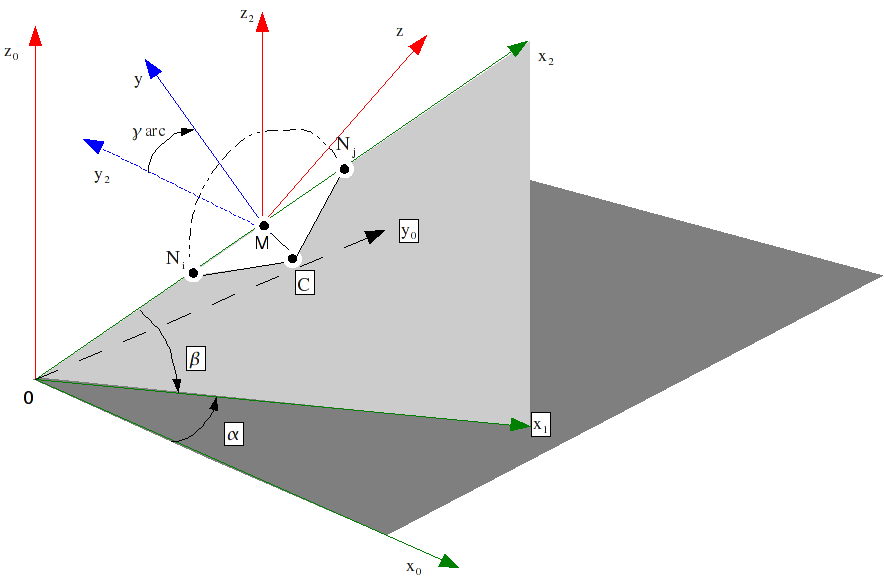
Figure 8-a : Repère local de la poutre courbe.
Pour rattacher les efforts appliqués en un point \(P\) de la structure aux efforts obtenus en un autre point \(Q\) de la structure, on intègre les équations d’équilibre statique d’une poutre courbe (sans effort réparti).
Nous allons ici nous borner à étudier la poutre courbe à section constante (avec prise en compte du cisaillement transverse) et à rayon de courbure constant.
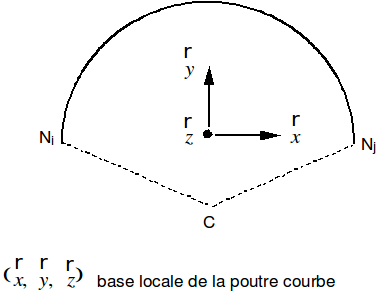
Figure 8-b : Repère moyen (repère local)
Les équations d’équilibre statique sont:
\(\begin{array}{cc}\lbrace \begin{array}{c}{N}_{,s}-{V}_{1}=0\\ {V}_{1,s}+\frac{N}{R}=0\\ {V}_{2,s}=0\end{array}\text{}& \lbrace \begin{array}{c}{M}_{T,s}-\frac{{M}_{1}}{R}=0\\ {M}_{1,s}+\frac{{M}_{T}}{R}-{V}_{2}=0\\ {M}_{2,s}+{V}_{1}=0\end{array}\end{array}\)
ceci pour:
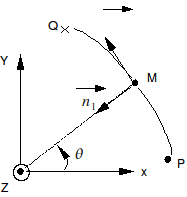
Figure 8-c : Repère curviligne.
Pour intégrer, on utilise les conditions en \(P\) :
\(\begin{array}{cc}\lbrace \begin{array}{c}N={F}_{y}\\ {V}_{1}=-{\text{F}}_{x}\\ {V}_{2}={F}_{z}\end{array}\text{}& \lbrace \begin{array}{c}{M}_{T}={M}_{y}\\ {M}_{1}=-{\text{M}}_{x}\\ {M}_{2}={M}_{z}\end{array}\end{array}\)
En intégrant et en passant dans le système d’axe suivant:
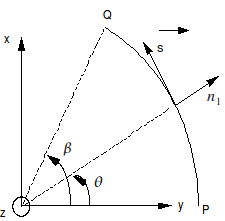
Figure 8-d : Système d’axe choisi par l’intégration.
On obtient:
\(\left[\begin{array}{c}N\\ {V}_{1}\\ {V}_{2}\\ {M}_{T}\\ {M}_{1}\\ {M}_{2}\end{array}\right]=\underset{{J}_{\theta}}{\underset{\underbrace{}}{(\begin{array}{cccccc}\cos\theta & -\sin\theta & 0& 0& 0& 0\\ \sin\theta & \cos\theta & 0& 0& 0& 0\\ 0& 0& 1& 0& 0& 0\\ 0& 0& R(\cos\theta -1)& \cos\theta & -\sin\theta & 0\\ 0& 0& R\sin\theta & \sin\theta & \cos\theta & 0\\ R(\cos\theta -1)& -R\sin\theta & 0& 0& 0& 1\end{array})}}\left[\begin{array}{c}{F}_{x}\\ {F}_{y}\\ {F}_{z}\\ {M}_{x}\\ {M}_{y}\\ {M}_{z}\end{array}\right]\)
Nous allons maintenant prendre en compte les caractéristiques mécaniques en utilisant l’énergie potentielle:
\({E}_{p}=\frac{1}{2}\underset{{s}_{1}}{\overset{{s}_{2}}{\int}}(\frac{{\tilde{N}}^{2}}{ES}+\frac{{\tilde{V}}_{1}^{2}}{{k}_{1}SG}+\frac{{\tilde{V}}_{2}^{2}}{{k}_{2}SG}+\frac{{\tilde{M}}_{T}^{2}}{EI}+\frac{{\tilde{M}}_{1}^{2}}{E{I}_{1}}+\frac{{\tilde{M}}_{2}^{2}}{E{I}_{2}})\mathrm{ds}\)
(le signe « \(~\) « signifie que nous utilisons les efforts internes) (remarque: \(\tilde{f}=-f\) par le principe d’action-réaction).
Rappel des relations de comportement dans le cadre du modèle de Timoshenko:
\(\lbrace \begin{array}{c}N=\mathrm{ES}\frac{\partial u}{\partial s}\\ {\tilde{V}}_{1}={k}_{1}\mathrm{SG}(\frac{\partial {w}_{1}}{\partial s}-{\theta}_{2})\\ {\tilde{V}}_{2}={k}_{2}\mathrm{SG}(\frac{\partial {w}_{2}}{\partial s}+{\theta}_{1})\end{array}\lbrace \begin{array}{c}{\tilde{M}}_{T}=\mathrm{EI}\frac{\partial \theta }{\partial s}\\ {\tilde{M}}_{1}=-{\mathrm{EI}}_{1}\frac{\partial {\theta}_{1}}{\partial s}\\ {\tilde{M}}_{2}=-{\mathrm{EI}}_{2}\frac{\partial {\theta}_{2}}{\partial s}\end{array}\)
Torseur des efforts intérieurs: |
Torseur cinématique: |
\(\left\lbrace T\right\rbrace \text{}\mid \begin{array}{c}\tilde{N}s+\tilde{T}\\ {\tilde{M}}_{T}s+\tilde{M}\end{array}\) |
\(\left\lbrace C\right\rbrace \text{}\mid \begin{array}{c}\theta s+{\theta}_{1}{n}_{1}+{\theta}_{2}{n}_{2}\\ us+{w}_{1}{n}_{1}+{w}_{2}{n}_{2}\end{array}\) |
D’où:
\(\begin{array}{}{E}_{p}=\frac{1}{2}{\int}_{{s}_{1}}^{{s}_{2}}(N,{V}_{1,}{V}_{2})\left[\begin{array}{ccc}\frac{1}{\mathrm{ES}}& 0& 0\\ 0& \frac{1}{{k}_{1}\mathrm{SG}}& 0\\ 0& 0& \frac{1}{{k}_{2}\mathrm{SG}}\end{array}\right](\begin{array}{}N\\ {V}_{1}\\ {V}_{2}\end{array})\mathrm{ds}\\ +\frac{1}{2}{\int}_{{s}_{1}}^{{s}_{2}}({M}_{T},{M}_{1,}{M}_{2})\left[\begin{array}{ccc}\frac{1}{\mathrm{EI}}& 0& 0\\ 0& \frac{1}{{\mathrm{EI}}_{1}}& 0\\ 0& 0& \frac{1}{{\mathrm{EI}}_{2}}\end{array}\right](\begin{array}{}{M}_{T}\\ {M}_{1}\\ {M}_{2}\end{array})\mathrm{ds}\end{array}\)
ou encore:
\(\begin{array}{}{E}_{p}=\frac{1}{2}{\int}_{0}^{\beta}{\left[\begin{array}{c}{F}_{x}\\ {F}_{y}\\ {F}_{z}\\ {M}_{x}\\ {M}_{y}\\ {M}_{z}\end{array}\right]}_{P}^{T}{J}_{\theta}^{T}\left[\begin{array}{cccccc}\frac{1}{\text{ES}}& & & & & \\ & \frac{1}{{k}_{1}\text{SG}}& & & & \\ & & \frac{1}{{k}_{2}\text{SG}}& & 0& \\ & & & \frac{1}{\text{GC}}& & \\ & 0& & & \frac{1}{{\mathrm{EI}}_{1}}& \\ & & & & & \frac{1}{{\mathrm{EI}}_{2}}\end{array}\right]{J}_{\theta}{\left[\begin{array}{c}{F}_{x}\\ {F}_{y}\\ {F}_{z}\\ {M}_{x}\\ {M}_{y}\\ {M}_{z}\end{array}\right]}_{P}\text{Rd}\theta \end{array}\)
\({J}_{q}\) étant la matrice obtenue précédemment.
On peut ainsi calculer la matrice de flexibilité \([C]\) :
\([C]={\int}_{0}^{\beta}{J}_{\theta}^{T}\text{}\left[\begin{array}{cccccc}\frac{1}{\text{ES}}& & & & & \\ & \frac{1}{{k}_{1}\text{SG}}& & & & \\ & & \frac{1}{{k}_{2}\text{SG}}& & 0& \\ & & & \frac{1}{\text{GC}}& & \\ & 0& & & \frac{1}{{\mathrm{EI}}_{1}}& \\ & & & & & \frac{1}{{\mathrm{EI}}_{2}}\end{array}\right]{J}_{\theta}\text{Rd}\theta\)
Nous pouvons remarquer que la matrice \({J}_{\theta}\) peut se décomposer en deux sous matrices indépendantes, une partie concernant la flexion dans le plan de l’élément, l’autre concernant la flexion hors du plan de l’élément.
Remarque :
Cette décomposition va permettre d’inverser plus facilement les matrices que nous allons obtenir un peu plus loin.
\({J}_{\theta}\to {J}_{1\theta },{J}_{2\theta }\)
Flexion dans le plan de l’élément:
\(\left[\begin{array}{c}N\\ {V}_{1}\\ {M}_{2}\end{array}\right]=\underset{{J}_{1\theta }}{\underset{\underbrace{}}{(\begin{array}{ccc}\cos\theta & -\sin\theta & 0\\ \sin\theta & \cos\theta & 0\\ R(\cos\theta -1)& -R\sin\theta & 1\end{array})}}\left[\begin{array}{c}{F}_{x}\\ {F}_{y}\\ {M}_{z}\end{array}\right]\)
Flexion hors du plan de l’élément:
\(\left[\begin{array}{c}{M}_{T}\\ {M}_{1}\\ {V}_{2}\end{array}\right]=\underset{{J}_{2\theta }}{\underset{\underbrace{}}{(\begin{array}{ccc}\cos\theta & -\sin\theta & R(\cos\theta -1)\\ \sin\theta & \cos\theta & R\sin\theta \\ 0& 0& 1\end{array})}}\left[\begin{array}{c}{M}_{x}\\ {M}_{y}\\ {F}_{z}\end{array}\right]\)
Matrice de flexibilité pour la flexion dans le plan de la poutre [C1]#
\(\begin{array}{}\left[{C}^{1}\right]={\int}_{0}^{\beta}\left[\begin{array}{ccc}\cos\theta & \sin\theta & R(\cos\theta -1)\\ -\sin\theta & \cos\theta & -R\sin\theta \\ 0& 0& 1\end{array}\right]\left[\begin{array}{ccc}\frac{1}{\mathrm{ES}}& 0& 0\\ 0& \frac{1}{{k}_{1}\mathrm{SG}}& 0\\ 0& 0& \frac{1}{{\mathrm{EI}}_{2}}\end{array}\right]{J}_{1\theta }Rd\theta \\ ={\int}_{0}^{\beta}\left[\begin{array}{ccc}{x}_{11}& {x}_{12}& \frac{R(\cos\theta -1)}{{\mathrm{EI}}_{2}}\\ & {x}_{22}& -\frac{R\sin\theta }{{\mathrm{EI}}_{2}}\\ \text{sym.}& & \frac{1}{{\mathrm{EI}}_{2}}\end{array}\right]Rd\theta \end{array}\)
avec: \(\begin{array}{}{x}_{11}=\frac{{\cos}^{2}\theta }{\mathrm{ES}}+\frac{{\sin}^{2}\theta }{{k}_{1}\mathrm{SG}}+\frac{{R}^{2}{(\cos\theta -1)}^{2}}{{\mathrm{EI}}_{2}}\\ {x}_{12}=-\frac{\cos\theta \sin\theta }{\mathrm{ES}}+\frac{\cos\theta \sin\theta }{{k}_{1}\mathrm{SG}}-\frac{{R}^{2}(\cos\theta -1)\sin\theta }{{\mathrm{EI}}_{2}}\\ {x}_{22}=\frac{{\sin}^{2}\theta }{\mathrm{ES}}+\frac{{\cos}^{2}\theta }{{k}_{1}\mathrm{SG}}+\frac{{R}^{2}{\sin}^{2}\theta }{{\mathrm{EI}}_{2}}\end{array}\)
Annexe:
\(\begin{array}{}{\int}_{o}^{\beta}{\cos}^{2}\theta d\theta +{\int}_{o}^{\beta}{\sin}^{2}\theta d\theta =\beta \\ {\int}_{o}^{\beta}{\cos}^{2}\theta d\theta =\frac{1}{2}(\beta +\sin\beta \cos\beta )=\frac{1}{4}(2\beta -\sin(2\beta ))\\ {\int}_{o}^{\beta}{\sin}^{2}\theta d\theta =\frac{1}{2}(\beta +\sin\beta \cos\beta )=\frac{1}{4}(2\beta -\sin(2\beta ))\\ {\int}_{o}^{\beta}\sin\theta \cos\theta d\theta =\frac{{\sin}^{2}\beta }{2}\end{array}\)
d’où:
\(\begin{array}{}{C}_{11}^{1}=\frac{R}{4\text{ES}}(2\beta +\sin(2\beta ))+\frac{R}{4{k}_{1}\text{SG}}(2\beta -\sin(2\beta ))+\frac{{R}^{3}}{4{\text{EI}}_{2}}(6\beta -8\sin\beta +\sin(2\beta )),\\ {C}_{22}^{1}=\frac{R}{4\text{ES}}(2\beta +\sin(2\beta ))+\frac{R}{4{k}_{1}\text{SG}}(2\beta -\sin(2\beta ))+\frac{{R}^{3}}{4{\text{EI}}_{2}}(2\beta -\sin(2\beta )),\end{array}\)
\(\begin{array}{}{C}_{33}^{1}=\frac{R\beta }{E{I}_{2}}\\ {C}_{12}^{1}=-\frac{R}{2ES}{\sin}^{2}\beta +\frac{{R}^{3}}{2{k}_{1}SG}{\sin}^{2}\beta -\frac{{R}^{3}}{2E{I}_{2}}{\sin}^{2}\beta -\frac{{R}^{3}}{2E{I}_{2}}\left[2\cos\beta -2\right]\\ {C}_{13}^{1}=\frac{{R}^{2}}{E{I}_{2}}(\sin\beta -\beta )\\ {C}_{23}^{1}=\frac{{R}^{2}}{E{I}_{2}}(\cos\beta -1)\end{array}\)
Matrice de flexibilité pour la flexion hors du plan de la poutre [C2]#
\(\begin{array}{c}\left[{\mathrm{C}}^{2}\right]=\underset{0}{\overset{\beta}{\int}}\left[\begin{array}{ccc}\cos\theta & \sin\theta & 0\\ -\sin\theta & \cos\theta & 0\\ R\left(\cos\theta -1\right)& R\sin\theta & 1\end{array}\right]\left[\begin{array}{ccc}\frac{1}{\text{EI}}& 0& 0\\ 0& \frac{1}{{\mathit{EI}}_{1}}& 0\\ 0& 0& \frac{1}{{k}_{2}\text{SG}}\end{array}\right]{J}_{2\theta }Rd\theta \\ ={\int}_{0}^{\beta}\left[\begin{array}{ccc}\frac{{\cos}^{2}\theta }{\text{EI}}+\frac{{\sin}^{2}\theta }{{\mathit{EI}}_{1}}& -\frac{\cos\theta \sin\theta }{\text{EI}}+\frac{\cos\theta \sin\theta }{{\mathit{EI}}_{1}}& \frac{R\left(\cos\theta -1\right)\cos\theta }{\text{EI}}+\frac{R{\sin}^{2}\theta }{{\mathit{EI}}_{1}}\\ & \frac{{\sin}^{2}\theta }{\text{EI}}+\frac{{\cos}^{2}\theta }{{\mathit{EI}}_{1}}& -\frac{R\left(\cos\theta -1\right)\sin\theta }{\text{EI}}+\frac{R\cos\theta \sin\theta }{{\mathit{EI}}_{1}}\\ \text{sym.}& & \frac{{R}^{2}{\left(\cos\theta -1\right)}^{2}}{\text{EI}}+\frac{{R}^{2}{\sin}^{2}\theta }{{\mathit{EI}}_{1}}+\frac{1}{{k}_{2}\text{SG}}\end{array}\right]Rd\theta \end{array}\)
\(\begin{array}{c}{C}_{11}^{2}=-\frac{R}{4\text{EI}}\left(2\beta +\sin\left(2\beta \right)\right)+\frac{R}{4{\mathit{EI}}_{1}}\left(2\beta +\sin\left(2\beta \right)\right)\\ {C}_{22}^{2}=\frac{R}{4\text{EI}}\left(2\beta -\sin\left(2\beta \right)\right)+\frac{R}{4{\mathit{EI}}_{1}}\left(2\beta +\sin\left(2\beta \right)\right)\\ {C}_{33}^{2}=-\frac{{R}^{3}}{2\text{EI}}\left[6\beta -8\sin\beta +\sin\left(2\beta \right)\right]+\frac{{R}^{3}}{4{\mathit{EI}}_{1}}\left(2\beta +\sin\left(2\beta \right)\right)+\frac{\text{Rb}}{{k}_{2}\text{SG}}\\ {C}_{12}^{2}=-\frac{R}{2\text{EI}}{\sin}^{2}\beta +\frac{R}{2{\mathit{EI}}_{1}}{\sin}^{2}\beta \\ {C}_{13}^{2}=\frac{{R}^{2}}{4\text{EI}}\left(2\beta +\sin\left(2\beta \right)-4\sin\beta \right)+\frac{{R}^{2}}{4{\mathit{EI}}_{1}}\left(2\beta -\sin\left(2\beta \right)\right)\\ {C}_{23}^{2}=-\frac{{R}^{2}}{2\text{EI}}\left({\sin}^{2}\beta +2\cos\beta -2\right)+\frac{{R}^{2}}{2{\mathit{EI}}_{1}}{\sin}^{2}\beta \end{array}\)
Ayant déterminé la matrice de flexibilité, nous allons pouvoir calculer la matrice de rigidité.
On a donc:
\({E}_{p}=\frac{1}{2}{T}_{P}^{{e}^{T}}\left[C\right]{T}_{P}^{e}\) , ceci \(\forall {T}_{P}^{e}\) (\(e\) : pour extérieur)
Comme on a: \({T}_{Q}^{e}={J}_{\beta}{T}_{P}^{e}\) (Rappel: \({T}_{P}^{e}\text{et}{T}_{Q}^{e}\) ne sont pas décrits dans la même base).
On a aussi:
\({E}_{p}=\frac{1}{2}{T}_{Q}^{{e}^{T}}{J}_{\beta}^{-{1}^{T}}\left[C\right]{J}_{\beta}^{-1}{T}_{Q}^{e},\forall {T}_{Q}^{e}\)
A l’aide du théorème de Castigliano, on peut obtenir les déplacements associés aux efforts extérieurs \({T}^{e}\) .
\({U}_{p}=[C]{T}_{P}^{e}\) |
dans la base locale du point \(P{(s,{n}_{1},{n}_{2})}_{P}\) |
et \({U}_{Q}={J}_{\beta}^{-{1}^{T}}\left[C\right]{J}_{\beta}^{-1}{T}_{Q}^{e}\) |
dans la base locale du point \(Q(s,{n}_{1},{n}_{2}){}_{Q}\text{}\) |
\(\forall {T}_{P}^{e}\) et \(\forall {T}_{Q}^{e}\) |
En décomposant le problème en deux sous-problèmes, et en utilisant le principe de superposition, on peut écrire:
\(\begin{array}{}{T}_{\mathrm{Qtotal}}^{e}=\underset{\begin{array}{}\text{effort provenant}\\ \text{du point P}\end{array}}{{T}_{\mathrm{PP}}^{e}}+\underset{\begin{array}{}\text{effort provenant}\\ \text{du point Q}\end{array}}{{T}_{\mathrm{PQ}}^{e}}=-{T}_{\mathrm{PP}}^{i}-{T}_{\mathrm{PQ}}^{i}\\ {T}_{\mathrm{Qtotal}}^{e}=\underset{\begin{array}{}\text{effort provenant}\\ \text{du point Q}\end{array}}{{T}_{\mathrm{QP}}^{e}}+\underset{\begin{array}{}\text{effort provenant}\\ \text{du point P}\end{array}}{{T}_{\mathrm{QQ}}^{e}}=-{T}_{\mathrm{QP}}^{i}-{T}_{\mathrm{QQ}}^{i}\end{array}\)
(on applique deux torseurs d’effort (indépendants l’un de l’autre) au point \(P\) et au point \(Q\) ).
Action provenant d’un côté: \({T}_{\text{PP}}^{i}=-{T}_{P}^{e}=-K\mathrm{Up}\text{}(K={\left[C\right]}^{\text{-1}})\)
Action provenant de l’autre côté: \({T}_{\text{PQ}}^{i}\text{=+}{J}_{\beta}^{-1}{T}_{Q}^{e}={J}_{\beta}^{-1}\left[{J}_{\beta}K{J}_{\beta}^{T}\right]{U}_{Q}=K{J}_{\beta}^{T}{U}_{Q}\)
Nous obtenons ainsi:
\({T}_{{P}_{\text{total}}}^{e}={\text{K U}}_{P}-{\text{K J}}_{\beta}^{T}\text{}{U}_{Q}\) et de même \({T}_{{Q}_{\text{total}}}^{e}=-{J}_{\beta}{\text{K U}}_{P}+{J}_{\beta}{\text{K J}}_{\beta}^{T}{U}_{Q}\)
La matrice de rigidité pour les « déplacements » \({U}_{P}\) (donnés dans sa base locale) et pour les « déplacements » \({U}_{Q}\) (donnés dans sa base locale) est:
\(K=\left[\begin{array}{c}K\text{}-K{J}_{\beta}^{T}\\ -{J}_{\beta}K\text{}{J}_{\beta}{\mathrm{KJ}}_{\beta}^{T}\end{array}\right]\)
De plus, dans le cas de poutres à section circulaire creuse (coudes de tuyauteries), on divise \({I}_{y}\) et \({I}_{z}\) par des coefficients de flexibilité donnés par l’utilisateur, pour prendre en compte la variation de rigidité due à l’ovalisation (cf. [§ 10.2 ]).
Pour la matrice de masse, on ne considère que la matrice réduite (masses concentrées), et on fait l’hypothèse simplificatrice que l’expression donnée pour les poutres droites [§ 4.4 ] reste valable en considérant un élément droit de longueur \(R.\beta\) .
On obtient:
\(\begin{array}{}{M}_{11}={M}_{22}={M}_{33}={M}_{77}={M}_{88}={M}_{99}=\frac{\rho \mathrm{SR}.\beta }{2}\\ {M}_{44}={M}_{1010}=\frac{\rho ({I}_{y}+{I}_{z})R.\beta }{2}\\ {M}_{55}={M}_{1111}=\frac{2\rho {I}_{y}R.\beta }{15}+\min(\frac{\rho S{(R\beta )}^{3}}{105},\frac{\rho S{(R\beta )}^{2}}{48})\\ {M}_{66}={M}_{1212}=\frac{2\rho {I}_{z}R.\beta }{15}+\min(\frac{\rho S{(R\beta )}^{3}}{105},\frac{\rho S{(R\beta )}^{2}}{48})\end{array}\)
Cette hypothèse est limitative et ne permet pas de bien prendre en compte l’inertie de flexion ou de torsion due à la courbure. Il vaut donc mieux dans ce cas modéliser une poutre courbe par plusieurs éléments courbes.
Chargements#
Les différents types de chargement développés pour les éléments de poutre « MECA_POU_D_E », « MECA_POU_D_T », en élasticité linéaire sont:
Types ou options |
MECA_POU_D_E |
MECA_POU_D_T |
CHAR_MECA_EPSI_R: chargement par imposition d’une déformation (de type stratification thermique) |
développé |
développé |
CHAR_MECA_PESA_R: chargement dû à la pesanteur |
développé |
développé |
CHAR_MECA_FR1D1D: chargement réparti par valeurs réelles |
développé |
développé |
CHAR_MECA_FF1D1D: chargement réparti par fonction |
développé |
développé |
CHAR_MECA_TEMP_R: chargement “thermique” |
développé |
développé |
CHAR_MECA_FRELEC: chargement “force électrique” créé par un conducteur secondaire droit |
développé |
développé |
CHAR_MECA_FRLAPL: chargement “force électrique” créé par un conducteur secondaire quelconque |
développé |
développé |
Chargement par déformation#
OPTION: « CHAR_MECA_EPSI_R »
On calcule le chargement à partir d’un état de déformation (cette option a été développée pour prendre en compte la stratification thermique dans les tuyauteries). La déformation est donnée par l’utilisateur à l’aide du mot-clé PRE_EPSI dans AFFE_CHAR_MECA.
Le modèle ne prend en compte qu’un travail en traction-compression et en flexion pure (pas d’effort tranchant, pas de moment de torsion).
On utilise les relations de comportement suivantes:
\(N=\mathrm{ES}\frac{\partial u}{\partial x},{M}_{y}=E{I}_{y}\frac{\partial {\theta}_{y}}{\partial x},{M}_{z}=E{I}_{z}\frac{\partial {\theta}_{z}}{\partial x}\)
Ainsi, on obtient le second membre élémentaire associé à ce chargement:
au point 1: \({F}_{{x}_{1}}=E{S}_{1}\frac{\partial u}{\partial x},{M}_{{y}_{1}}=E{I}_{{y}_{1}}\frac{\partial {\theta}_{y}}{\partial x},{M}_{{z}_{1}}=E{I}_{{z}_{1}}\frac{\partial {\theta}_{z}}{\partial x}\)
au point 2: \({F}_{{x}_{2}}=E{S}_{2}\frac{\partial u}{\partial x},{M}_{{y}_{2}}=E{I}_{{y}_{2}}\frac{\partial {\theta}_{y}}{\partial x},{M}_{{z}_{2}}=E{I}_{{z}_{2}}\frac{\partial {\theta}_{z}}{\partial x}\)
En se donnant \(\frac{\partial u}{\partial x},\frac{\partial {\theta}_{y}}{\partial x}\) et \(\frac{\partial {\theta}_{z}}{\partial x}\) pour une poutre, on peut lui affecter un chargement.
Chargement dû à la pesanteur#
OPTION: « CHAR_MECA_PESA_R »
La force de pesanteur est donnée par le module de l’accélération \(g\) et un vecteur normé indiquant la direction \(n\) .
Le principe pour répartir le chargement sur les deux nœuds de la poutre est de tenir compte des fonctions de forme \(\xi (x)\) associées à chaque degré de liberté de l’élément [§ 4 ]. Nous avons donc pour un chargement en pesanteur une force nodale équivalente \(\overrightarrow{Q}\) :
\(\overrightarrow{Q}={\int}_{0}^{L}\xi (x)\rho Sg\overrightarrow{n}\text{dx}\)
Remarques:
Les fonctions de forme utilisées sont (hypothèse simplificatrice) celles du modèle Euler‑Bernoulli.
Il faut, bien sûr, se placer dans le repère local de la poutre pour faire ce calcul.
Effort axial (en \(x\) ) :
\(\begin{array}{}{F}_{{x}_{i}}={\int}_{0}^{L}{\xi}_{i}\rho S\text{}g\cdot x\text{dx}\\ ({\xi}_{1}=1-\frac{x}{L},{\xi}_{2}=\frac{x}{L})\end{array}\)
d’où: \({F}_{{x}_{1}}=\rho g\cdot xL(\frac{{S}_{1}}{3}+\frac{{S}_{2}}{6})\) au point 1,
\({F}_{{x}_{2}}=\rho g\cdot xL(\frac{{S}_{1}}{6}+\frac{{S}_{2}}{3})\) au point 2,
pour une section variant linéairement \((S={S}_{1}+({S}_{2}-{S}_{1})\frac{x}{L})\)
et \(\begin{array}{}{F}_{{x}_{1}}=\rho g\cdot xL(\frac{3{S}_{1}+2\sqrt{{S}_{1}{S}_{2}}+{S}_{2}}{12}),\\ {F}_{{x}_{2}}=\rho g\cdot xL(\frac{{S}_{2}+2\sqrt{{S}_{1}{S}_{2}}+3{S}_{2}}{12})\end{array}\)
pour une section variant homothétiquement \((S{\left[\sqrt{{S}_{1}}+(\sqrt{{S}_{2}-\sqrt{{S}_{1}}})\frac{x}{L}\right]}^{2})\)
Moment de torsion:
Sans prise en compte du gauchissement, il est inexistant.
Dans le plan \((xoz)\) :
\(\begin{array}{}{F}_{{z}_{1}}=\rho g\cdot z{\int}_{0}^{L}{\xi}_{1}S\text{dx}\\ {M}_{{y}_{1}}=\rho g\cdot z{\int}_{0}^{L}{\xi}_{2}S\text{dx}\\ {F}_{{z}_{2}}=\rho g\cdot z{\int}_{0}^{L}{\xi}_{3}S\text{dx}\\ {M}_{{y}_{2}}=\rho g\cdot z{\int}_{0}^{L}{\xi}_{4}S\text{dx}\end{array}\)
\(\begin{array}{}{\xi}_{1}=2{(\frac{x}{L})}^{3}-3{(\frac{x}{L})}^{2}+1,{\xi}_{2}=L\left[-{(\frac{x}{L})}^{3}+2{(\frac{x}{L})}^{2}-\frac{x}{L}\right],\\ {\xi}_{3}=-2{(\frac{x}{L})}^{3}+3{(\frac{x}{L})}^{2},{\xi}_{4}=L\left[-{(\frac{x}{L})}^{3}+{(\frac{x}{L})}^{2}\right]\end{array}\)
d’où, pour une section variant linéairement:
\(\begin{array}{}{F}_{{y}_{1}}=\rho g\cdot yL(\frac{7{S}_{1}}{20}+\frac{3{S}_{2}}{20}),{M}_{{z}_{1}}=\rho g\cdot y{L}^{2}(\frac{{S}_{1}}{20}+\frac{{S}_{2}}{30})\\ {F}_{{y}_{2}}=\rho g\cdot yL(\frac{3{S}_{1}}{20}+\frac{7{S}_{2}}{20}),{M}_{{z}_{2}}=-\rho g\cdot y{L}^{2}(\frac{{S}_{1}}{30}+\frac{{S}_{2}}{20})\end{array}\)
et, pour une section variant homothétiquement:
\(\begin{array}{}{F}_{{z}_{1}}=\rho g\cdot zL(\frac{8{S}_{1}+5\sqrt{{S}_{1}{S}_{2}}+2{S}_{2}}{30}),{M}_{{y}_{1}}=\rho g\cdot z{L}^{2}(\frac{-2{S}_{1}-2\sqrt{{S}_{1}{S}_{2}}-{S}_{2}}{60})\\ {F}_{{z}_{2}}=\rho g\cdot zL(\frac{2{S}_{1}+5\sqrt{{S}_{1}{S}_{2}}+8{S}_{2}}{30}),{M}_{{y}_{2}}=\rho g\cdot z{L}^{2}(\frac{{S}_{1}+2\sqrt{{S}_{1}{S}_{2}}+{\mathrm{2S}}_{2}}{60})\end{array}\)
Dans le plan \((xoy)\) :
\(\begin{array}{}{F}_{{y}_{1}}=\rho g\cdot y{\int}_{o}^{L}{\xi}_{1}S\mathrm{dx},{M}_{{z}_{1}}=\rho g\cdot y{\int}_{o}^{L}-{\xi}_{2}S\mathrm{dx}\\ {F}_{{y}_{2}}=\rho g\cdot y{\int}_{o}^{L}{\xi}_{3}S\mathrm{dx},{M}_{{z}_{2}}=\rho g\cdot y{\int}_{o}^{L}-{\xi}_{4}S\mathrm{dx}\end{array}\)
d’où, pour une section variant linéairement:
\(\begin{array}{}{F}_{{y}_{1}}=\rho g\cdot yL(\frac{7{S}_{1}}{20}+\frac{3{S}_{2}}{20}),{M}_{{z}_{1}}=\rho g\cdot y{L}^{2}(\frac{{S}_{1}}{20}+\frac{{S}_{2}}{30})\\ {F}_{{y}_{2}}=\rho g\cdot yL(\frac{3{S}_{1}}{20}+\frac{7{S}_{2}}{20}),{M}_{{z}_{2}}=-\rho g\cdot y{L}^{2}(\frac{{S}_{1}}{30}+\frac{{S}_{2}}{20})\end{array}\)
et, pour une section variant homothétiquement:
\(\begin{array}{}{F}_{{y}_{1}}=\rho g\cdot yL(\frac{8{S}_{1}+5\sqrt{{S}_{1}{S}_{2}}+2{S}_{2}}{30}),{M}_{{z}_{1}}=\rho g\cdot y{L}^{2}(\frac{2{S}_{1}+2\sqrt{{S}_{1}{S}_{2}}+{S}_{2}}{60})\\ {F}_{{y}_{2}}=\rho g\cdot yL(\frac{2{S}_{1}+5\sqrt{{S}_{1}{S}_{2}}+8{S}_{2}}{30}),{M}_{{z}_{2}}=\rho g\cdot y{L}^{2}(\frac{-{S}_{1}-2\sqrt{{S}_{1}{S}_{2}}-2{S}_{2}}{60})\end{array}\)
Chargements répartis#
OPTIONS: « CHAR_MECA_FR1D1D », « CHAR_MECA_FF1D1D »,
Les chargements sont donnés sous le mot-clé FORCE_POUTRE, soit par des valeurs réelles dans AFFE_CHAR_MECA (option CHAR_MECA_FR1D1D), soit par fonctions dans AFFE_CHAR_MECA (option CHAR_MECA_FF1D1D).
Les différentes possibilités sont:
chargement constant |
chargement variant linéairement |
|
poutre droite à section constante |
développé |
développé |
poutre droite à section variant linéairement |
développé |
non |
poutre droite à section variant homothétiquement |
développé |
non |
Pour les poutres droites à section constante, le chargement réparti est composé de forces et de moments constants ou variant linéairement le long de l’axe de la poutre. Dans tous les autres cas la charge répartie est uniquement composée de force constante.
La méthode utilisée pour calculer le chargement à imposer aux nœuds est celle présentée au [§ Détermination du second membre ].
Poutre droite à section constante#
Pour un chargement constant ou variant linéairement, on obtient:
\({F}_{{x}_{1}}=L(\frac{{n}_{1}}{3}+\frac{{n}_{2}}{6}),{F}_{{x}_{2}}=L(\frac{{n}_{1}}{6}+\frac{{n}_{2}}{3}),{M}_{{x}_{1}}=L(\frac{{m}_{{t}_{1}}}{3}+\frac{{m}_{{t}_{2}}}{6}),{M}_{{x}_{2}}=L(\frac{{m}_{{t}_{1}}}{6}+\frac{{m}_{{t}_{2}}}{3})\)
\({n}_{1}\) et \({n}_{2}\) sont les composantes du chargement axial aux points 1 et 2, \({m}_{{t}_{1}}\) et \({m}_{{t}_{2}}\) sont les composantes du moment de torsion aux points 1 et 2, provenant des données de l’utilisateur replacées dans le repère local.
\({t}_{{y}_{1}}\) , \({t}_{{y}_{2}}\) , \({t}_{{z}_{1}}\) et \({t}_{{z}_{2}}\) sont les composantes de l’effort tranchant, \({m}_{{y}_{1}}\) , \({m}_{{y}_{2}}\) , \({m}_{{z}_{1}}\) et \({m}_{{z}_{2}}\) sont les composantes des moments de fléchissant, aux points 1 et 2, provenant des données de l’utilisateur replacées dans le repère local.
\(\begin{array}{cc}{F}_{{y}_{1}}=L(\frac{7{t}_{{y}_{1}}}{20}+\frac{3{t}_{{y}_{2}}}{20})-\frac{({m}_{{z}_{1}}+{m}_{{z}_{2}})}{2}& {M}_{{y}_{1}}=-{L}^{2}(\frac{{t}_{{z}_{1}}}{20}+\frac{{t}_{{z}_{2}}}{30})-\frac{({m}_{{y}_{2}}-{m}_{{y}_{1}})L}{12}\\ {F}_{{y}_{2}}=L(\frac{3{t}_{{y}_{1}}}{20}+\frac{7{t}_{{y}_{2}}}{20})+\frac{({m}_{{z}_{1}}+{m}_{{z}_{2}})}{2}& {M}_{{y}_{2}}={L}^{2}(\frac{{t}_{{z}_{1}}}{30}+\frac{{t}_{{z}_{2}}}{20})+\frac{({m}_{{y}_{2}}-{m}_{{y}_{1}})L}{12}\\ {F}_{{z}_{1}}=L(\frac{7{t}_{{z}_{1}}}{20}+\frac{3{t}_{{z}_{2}}}{20})+\frac{({m}_{{y}_{1}}+{m}_{{y}_{2}})}{2}& {M}_{{z}_{1}}={L}^{2}(\frac{{t}_{{y}_{1}}}{20}+\frac{{t}_{{y}_{2}}}{30})-\frac{({m}_{{z}_{2}}-{m}_{{z}_{1}})L}{12}\\ {F}_{{z}_{2}}=L(\frac{3{t}_{{z}_{1}}}{20}+\frac{7{t}_{{z}_{2}}}{20})-\frac{({m}_{{y}_{1}}+{m}_{{y}_{2}})}{2}& {M}_{{z}_{2}}=-{L}^{2}(\frac{{t}_{{y}_{1}}}{30}+\frac{{t}_{{y}_{2}}}{20})+\frac{({m}_{{z}_{2}}-{m}_{{z}_{1}})L}{12}\end{array}\)
Poutres droites à section variable#
Le chargement fourni doit être constant. On utilise une méthode similaire à celle utilisée par le poids propre [§ 55 ].
Le chargement fourni doit être constant le long de l’élément. Le chargement réduit aux nœuds est équivalent à celui que l’on peut obtenir en reprenant les résultats du [§ 9.3.1 ]. Avec une charge constante, cela devient:
\(\begin{array}{cccc}{F}_{{x}_{1}}=L\frac{n}{2}& {F}_{{x}_{2}}=L\frac{n}{2}& {F}_{{y}_{1}}=L\frac{{t}_{y}}{2}& {F}_{{y}_{2}}=L\frac{{t}_{y}}{2}\\ {M}_{{z}_{1}}={L}^{2}\frac{{t}_{y}}{12}& {M}_{{z}_{2}}=-{L}^{2}\frac{{t}_{y}}{12}& {F}_{{z}_{1}}=L\frac{{t}_{z}}{2}& {F}_{{z}_{2}}=L\frac{{t}_{z}}{2}\\ {M}_{{y}_{1}}=-{L}^{2}\frac{{t}_{z}}{12}& {M}_{{y}_{2}}={L}^{2}\frac{{t}_{z}}{12}& & \end{array}\)
Chargement thermique#
OPTION: « CHAR_MECA_TEMP_R »
Pour obtenir ce chargement, il faut calculer la déformation induite par la différence de température \(T-{T}_{\text{référence}}\) :
\(\begin{array}{}{u}_{1}=-L\alpha (T-{T}_{\text{référence}})\\ {u}_{2}=L\alpha (T-{T}_{\text{référence}})\end{array}\) (\(\alpha\) : coefficient de dilatation thermique)
Ensuite, on calcule les forces induites: \(F=Ku\) . Comme \(K\) est la matrice de rigidité locale à l’élément, on doit ensuite effectuer un changement de base pour obtenir les valeurs des composantes du chargement dans le repère global.
Chargement électrique#
OPTIONS: « FORCE_ELEC », « INTE_ELEC ».
Ce type de chargement permet de prendre en compte la force de Laplace agissant sur un conducteur principal, due à la présence d’un conducteur secondaire.
Le conducteur secondaire \(«\mathrm{2 }»\) est droit et il ne s’appuie pas sur une partie du maillage Aster si on utilise l’option « FORCE_ELEC ».
Le conducteur secondaire n’est pas nécessairement droit et il peut s’appuyer sur une partie du maillage Aster si on utilise l’option « INTE_ELEC ».
La densité linéique de la force de Laplace exercée en un point \(M\) du conducteur principal par le conducteur secondaire s’écrit:
\(f(M)=\frac{1}{2}{e}_{1}\wedge {\int}_{2}\frac{{e}_{2}\wedge r}{{\parallel r\parallel }^{3}}\mathrm{ds}\) avec \({\parallel {e}_{1}\parallel }^{2}={\parallel {e}_{2}\parallel }^{2}=1\)
Remarque:
Pour obtenir la force de Laplace, le vecteur retourné à la suite du calcul effectué par l’une de ces deux options doit être multiplié par la fonction temporelle d’intensité spécifiée par l’opérateur « DEFI_FONC_ELEC » .[U4.MK.10]
Conducteur secondaire droit fini ou infini#
OPTION: « FORCE_ELEC » [U4.44.01]
Pour un conducteur secondaire fini, nous avons:
\(\overrightarrow{f}(M)=\frac{{e}_{1}}{2}\wedge \frac{n}{d}(\sin{\alpha}_{1}-\sin{\alpha}_{2})\)
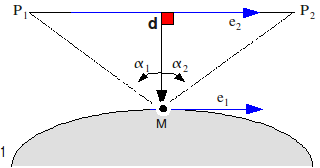
avec \(\begin{array}{}n=\frac{{e}_{2}\wedge d}{d}\\ d=∥d∥\end{array}\)
Pour un conducteur secondaire infini, nous avons:
\(f(M)={e}_{1}\wedge \frac{n}{d}\)
Trois types de chargement sont possibles:
conducteur droit parallèle infini,
conducteurs droits parallèles infinis multiples,
conducteur droit en position quelconque fini ou infini.
Pour le cas d’un conducteur droit parallèle infini, sa position peut être donnée de deux manières:
soit par un vecteur translation du conducteur principal au conducteur secondaire,
soit par la distance entre les deux conducteurs et par un point du conducteur secondaire.
On obtient donc un chargement constant sur tout l’élément principal. On peut ainsi utiliser la technique présentée au [§ 9.3 ] [§ 9.4 ] pour calculer le chargement aux nœuds.
\(\begin{array}{c}{\mathrm{F}}_{1}=\mathrm{f}(M)\frac{L}{2},{\mathrm{F}}_{2}=\mathrm{f}(M)\frac{L}{2},{\mathrm{M}}_{1}={\mathrm{e}}_{1}\wedge \mathrm{f}(M)\frac{{L}^{2}}{12},{\mathrm{M}}_{2}=-{\mathrm{e}}_{1}\wedge \mathrm{f}(M)\frac{{L}^{2}}{12}\\ \mathrm{f}(M)=\mathit{cste}\forall M\end{array}\)
Pour le cas des conducteurs droits parallèles infinies multiples , on doit donner directement le vecteur « force de Laplace » normé. Celui-ci étant habituellement donné dans le repère global, il faut déterminer le vecteur « force de Laplace » dans le repère local de l’élément principal. Ainsi de la même manière que précédemment, on calcule le chargement aux nœuds.
Pour le cas d’un conducteur droit en position quelconque fini ou infini , sa position est donnée par deux points \({P}_{1}\) et \({P}_{2}\) tel que le courant circule de \({P}_{1}\) vers \({P}_{2}\) . Le chargement n’est pas obligatoirement constant le long de l’élément principal.
La méthode choisie pour calculer le chargement réduit aux nœuds est évidemment la même qu’auparavant. Mais ici, l’intégration se fait numériquement en discrétisant l’élément en un certain nombre (en pratique: 100 points entre \({P}_{1}\) et \({P}_{2}\) ).
On intègre ainsi:
\(\begin{array}{}{F}_{1}={\int}_{0}^{L}f(M)\text{}\left[2{(\frac{x}{L})}^{3}-3{(\frac{x}{L})}^{2}+1\right]\text{dx}\\ {F}_{2}={\int}_{0}^{L}f(M)\text{}\left[-2{(\frac{x}{L})}^{3}+3{(\frac{x}{L})}^{2}\right]\text{dx}\end{array}\)
\(\begin{array}{}{\overrightarrow{M}}_{1}={\int}_{0}^{L}-{\overrightarrow{e}}_{1}\wedge \overrightarrow{f}(M)\left[L(-{(\frac{x}{L})}^{3}+2{(\frac{x}{L})}^{2}-\frac{x}{L})\right]\text{dx}\\ {\overrightarrow{M}}_{2}={\int}_{0}^{L}-{\overrightarrow{e}}_{1}\wedge \overrightarrow{f}(M)\left[L(-{(\frac{x}{L})}^{3}+{(\frac{x}{L})}^{2})\right]\text{dx}\end{array}\)
Remarque :
Comme \(f(M)\cdot x=0\) et \(({e}_{1}\wedge f(M))\cdot x=0,(x={e}_{1})\)
on utilise uniquement les fonctions de forme associées au problème de flexion.
Conducteur secondaire décrit par une partie de maillage ASTER#
OPTION: « INTE_ELEC », [U4.44.01]
Le conducteur secondaire dans son ensemble n’est pas nécessairement droit. Mais il est décrit uniquement par des éléments droits. Sa longueur est obligatoirement finie.
Sa position peut être complétée par l’utilisation d’un vecteur translation ou d’une symétrie plane (par un point et un vecteur normal normé du plan de symétrie) par rapport au conducteur principal.
Hormis le fait qu’il faut sommer l’interaction des différents éléments du conducteur secondaire sur le conducteur principal, la méthode est la même que précédemment (cas \((\mathrm{iii})\) ).
Remarque: Pour l’intégration numérique, on n’utilise 5 points compris entre \({P}_{1}\) et \({P}_{2}\) .
Torseur des efforts - Torseur des contraintes (ou efforts généralisés) - Forces nodales et réactions#
OPTIONS: « EFGE_ELNO », « SIEF_ELGA », Torseur des efforts
« SIPM_ELNO », « SIPO_ELNO », Tenseur des contraintes
« FORC_NODA », « REAC_NODA ». Forces nodales et réactions
◦ L’option EFGE_ELNO permet de calculer le torseur des efforts aux 2 nœuds de chaque élément de poutre.
◦ Les options SIPM_ELNO et SIPO_ELNO permettent de calculer les valeurs maximales des composantes du tenseur des contraintes intervenant dans un modèle de poutre.
◦ L’option SIEF_ELGA permet le calcul des forces nodales (option FORC_NODA et des réactions REAC_NODA).
Remarque:
Lorsque l’une de ces options se terminent par « _C », cela signifie que les valeurs des déplacements, des efforts sont complexes.
Le torseur des efforts#
OPTION: « EFGE_ELNO »
On cherche à calculer aux deux nœuds de chaque élément “poutre” constituant le maillage de la structure étudiée, les efforts exercés sur l’élément “poutre” par le reste de la structure. Les valeurs sont données dans la base locale de chaque élément.
En intégrant les équations d’équilibre, on obtient [§ Calcul des efforts aux nœuds de la poutre ] les efforts dans le repère local de l’élément:
\({R}_{\text{LOC}}={K}_{\text{LOC}}^{e}{u}_{\text{LOC}}+{M}_{\text{LOC}}^{e}{\ddot{u}}_{\text{LOC}}-{f}_{\text{LOC}}^{e}\)
où: \({R}_{\text{LOC}}=(-{N}^{1},-{V}_{Y}^{1},-{V}_{Z}^{1},-{M}_{T}^{1},-{M}_{Y}^{1},-{M}_{Z}^{1},{N}^{2},{V}_{Y}^{2},{V}_{Z}^{2},{M}_{T}^{2},{M}_{Y}^{2},{M}_{Z}^{2})\)
\({K}_{\text{LOC}}^{e}\) |
matrice élémentaire de rigidité de l’élément “exact” de poutre, |
\({M}_{\text{LOC}}^{e}\) |
matrice élémentaire de masse de l’élément poutre, |
\({f}_{\text{LOC}}^{e}\) |
vecteur des efforts “répartis” sur l’élément poutre, |
\({u}_{\text{LOC}}\) |
vecteur “degré de liberté” limité à l’élément poutre, |
\({\ddot{u}}_{\text{LOC}}\) |
vecteur “accélération” limité à l’élément poutre. |
On change ensuite les signes des efforts au nœud 1 [§ Calcul des efforts aux nœuds de la poutre ].
OPTION: « SIEF_ELGA »
L’option « SIEF_ELGA » est implantée pour des raisons de compatibilité avec d’autres options. Elle ne sert qu’au calcul des forces nodales et des réactions. Elle est calculée par: \({R}_{\text{LOC}}={K}_{\text{LOC}}^{e}{u}_{\text{LOC}}\) .
Le tenseur des contraintes#
OPTIONS: “SIPM_ELNO”, “SIPO_ELNO”.
On cherche à calculer les valeurs maximales des composantes \({\sigma}_{xx},{\sigma}_{xy}\) et \({\sigma}_{xz}\) qui sont reliées aux efforts par:
\(\begin{array}{}N={\int}_{s}{\sigma}_{xx}\text{dS},\\ {V}_{y}={\int}_{s}{\sigma}_{xy}\text{dS},\\ {V}_{z}={\int}_{s}{\sigma}_{xz}\text{dS},\\ {M}_{T}={\int}_{s}(y{\sigma}_{xz}-z{\sigma}_{xy})\text{}\text{dS},\\ {M}_{y}={\int}_{s}z{\sigma}_{xx}\text{dS},\\ {M}_{z}={\int}_{s}-y{\sigma}_{xx}\text{dS}.\end{array}\)
Avec l’option « SIPM_ELNO », on calcule le minimum et la maximum de la contrainte \({\sigma}_{xx}\text{}\) sur la section.
◦ Pour une section rectangulaire:
\(\begin{array}{c}{\sigma}_{xx}^{{i}^{\mathit{Max}}}=\frac{{N}^{i}}{{A}^{i}}+(∣\frac{{M}_{Y}^{i}}{{I}_{Y}^{i}}\frac{{H}_{Z}^{i}}{2}∣+∣\frac{{M}_{Z}^{i}}{{I}_{Z}^{i}}\frac{{H}_{Z}^{i}}{2}∣)\\ {\sigma}_{xx}^{{i}^{\mathit{Min}}}=\frac{{N}^{i}}{{A}^{i}}-(∣\frac{{M}_{Y}^{i}}{{I}_{Y}^{i}}\frac{{H}_{Z}^{i}}{2}∣+∣\frac{{M}_{Z}^{i}}{{I}_{Z}^{i}}\frac{{H}_{Z}^{i}}{2}∣)\end{array}\)
avec \({I}_{\gamma},{I}_{Z}\) : moments d’inerties géométriques
avec \({H}_{\Gamma},{H}_{Z}\) :côtés du rectangle
◦ Pour une section circulaire:
\(\begin{array}{c}{\sigma}_{xx}^{{i}^{\mathit{Max}}}=\frac{{N}^{i}}{{A}^{i}}+(\sqrt{{({M}_{Y}^{i})}^{2}+{({M}_{Z}^{i})}^{2}}\frac{{R}^{i}}{{I}_{Y}^{i}})\\ {\sigma}_{xx}^{{i}^{\mathit{Min}}}=\frac{{N}^{i}}{{A}^{i}}-(\sqrt{{({M}_{Y}^{i})}^{2}+{({M}_{Z}^{i})}^{2}}\frac{{R}^{i}}{{I}_{Y}^{i}})\end{array}\)
avec \(R\) : rayon de la section
◦ Pour une section générale, un message d’alarme est émis pour préciser que l’on ne sait pas faire dans ce cas.
Pour retrouver ces formules, on utilise les relations entre les contraintes et les déformations puis celles entre les efforts internes et \((u,x;{\gamma}_{xy};{\gamma}_{xz};{\theta}_{x,x};{\theta}_{y,x};{\theta}_{z,x})\)
\(\begin{array}{}\lbrace \begin{array}{c}{\sigma}_{xx}=E{\varepsilon}_{xx}\\ {\sigma}_{xy}=2G{\varepsilon}_{xy}\\ {\sigma}_{xz}=2G{\varepsilon}_{xz},\end{array}\\ \lbrace \begin{array}{c}{\varepsilon}_{xx}=u,x+z{\theta}_{y,x}-y{\theta}_{z,x}\\ 2{\varepsilon}_{xy}={\gamma}_{xy}-z{\theta}_{x,x}\text{}({\gamma}_{xy}={V}_{,x}-{\theta}_{z})\\ 2{\varepsilon}_{xy}={\gamma}_{xz}+y{\theta}_{x,x}\text{}({\gamma}_{xz}={W}_{,x}+{\theta}_{y}),\end{array}\end{array}\)
\((\begin{array}{c}N\\ {V}_{Y}\\ {V}_{Z}\\ {M}_{T}\\ {M}_{Y}\\ {M}_{Z}\end{array})=(\begin{array}{cccccc}\text{EA}& & & & & \\ & {k}_{Y}\text{GA}& & 0& & \\ & & {k}_{Z}\text{GA}& & & \\ & & & \text{GJ}& & \\ & 0& & & {\text{EI}}_{Y}& \\ & & & & & {\text{EI}}_{Z}\end{array})(\begin{array}{c}u,x\\ {\gamma}_{xy}\\ {\gamma}_{xz}\\ {\theta}_{x,x}\\ {\theta}_{y,x}\\ {\theta}_{z,x}\end{array})\)
(Les différents types de mouvement sont découplés lorsqu’on travaille avec les axes principaux (par définition)). On obtient:
\(\begin{array}{}{\sigma}_{xx}(x,y,z)=E\left[\frac{N}{\text{EA}}+z\frac{{M}_{Y}}{{\text{EI}}_{Y}}-y\frac{{M}_{Z}}{{\text{EI}}_{Z}}\right],\\ {\sigma}_{xy}(x,y,z)=G\left[\frac{{V}_{Y}}{{k}_{Y}\text{GA}}-z\frac{{M}_{T}}{G{J}_{X}}\right],\\ {\sigma}_{xz}(x,y,z)=G\left[\frac{{V}_{Z}}{{k}_{Z}\text{GA}}+y\frac{{M}_{T}}{G{J}_{X}}\right]\end{array}\)
Avec l’option “SIPO_ELNO”, le calcul est quelque peu différent. On recherche les effets maximums de chaque effort \((N,{V}_{Y},{V}_{Z},{M}_{T},{M}_{X},{M}_{Y})\) sur les composantes \({\sigma}_{xx}\) , \({\sigma}_{xy}\) et \({\sigma}_{xz}\) . On retrouve les résultats précédents sous forme décomposée. Le vecteur résultat s’écrit:
\(\begin{array}{}({\sigma}_{{1}^{1}},{\sigma}_{{2}^{1}},{\sigma}_{{3}^{1}},{\sigma}_{{4}^{1}},{\sigma}_{{5}^{1}},{\sigma}_{{6}^{1}}\\ {\sigma}_{{1}^{2}},{\sigma}_{{2}^{2}},{\sigma}_{{3}^{2}},{\sigma}_{{4}^{2}},{\sigma}_{{5}^{2}},{\sigma}_{{6}^{2}})\end{array}\)
avec \({\sigma}_{{1}^{i}}=\frac{{N}^{i}}{{A}^{i}}\) pour le nœud \(i\) , \((i=1,2)\)
\(\begin{array}{}{\sigma}_{{1}^{i}}=\frac{{N}^{i}}{{A}^{i}}\\ {\sigma}_{{3}^{i}}=\frac{{V}_{{Z}^{i}}}{{A}_{{Z}^{i}}},\\ {\sigma}_{{4}^{i}}=\frac{{M}_{{T}^{i}}}{{J}_{{X}^{i}}}{R}_{{T}^{i}},\end{array}\)
pour les sections rectangulaires:
\(\begin{array}{}{\sigma}_{{5}^{i}}=\frac{{M}_{{Y}^{i}}}{{I}_{{Y}^{i}}}\frac{{H}_{{Z}^{i}}}{2},\\ {\sigma}_{{6}^{i}}=-\frac{{M}_{{Z}^{i}}}{{I}_{{Z}^{i}}}\frac{{H}_{{Y}^{i}}}{2},\end{array}\) \(\begin{array}{}{\sigma}_{{5}^{i}}=\frac{{M}_{{Y}^{i}}}{{I}_{{Y}^{i}}}{R}^{i},\\ {\sigma}_{{6}^{i}}=-\frac{{M}_{{Z}^{i}}}{{I}_{{Y}^{i}}}{R}^{i},\end{array}\)
pour les sections quelconques au point \(({R}_{{\Gamma}^{i}},{R}_{{Z}^{i}})\) :
\(\begin{array}{}{\sigma}_{{5}^{i}}=\frac{{M}_{{Y}^{i}}}{{I}_{{Y}^{i}}}{R}_{{Z}^{i}},\\ {\sigma}_{{6}^{i}}=-\frac{{M}_{{Z}^{i}}}{{I}_{{Z}^{i}}}{R}_{{Y}^{i}}\end{array}\)
Dans le cas de poutre à section circulaire creuse , la flexibilité des coques minces n’est pas prise en compte, il peut être nécessaire de corriger certaines grandeurs pour tenir compte de l’ovalisation de la section. Deux coefficients sont utilisés pour cela:
un coefficient de flexibilité \(\text{cflex}\) (utilisé aussi par la rigidité), qui est appliqué aux inerties,
un coefficient d’intensification des contraintes \(\text{isigm}\) qui est appliqué aux contraintes.
Les coefficients de corrections sont à renseigner sous le mot clef:
POUTRE/SECTION=COUDE de la commande AFFE_CARA_ELEM.
En particulier, on peut s’inspirer des règles RCC_M.
\(\begin{array}{c}{I}_{y\text{corrigé}}=\frac{{I}_{y}}{{\mathit{cflex}}_{y}},{I}_{z\text{corrigé}}=\frac{{I}_{z}}{{\mathit{cflex}}_{z}}\mathit{où}{\mathit{cflex}}_{y\mathit{et}z}\ge 1\\ {\sigma}_{{\mathit{Mf}}_{y}}=\frac{{\mathit{Mf}}_{y}}{{I}_{y\text{corrigé}}}{R}_{z}\frac{{\mathit{isigm}}_{y}}{{\mathit{cflex}}_{y}}=\frac{{\mathit{Mf}}_{y}}{{I}_{y}}{R}_{z}{\mathit{isigm}}_{y}\mathit{où}{\mathit{isigm}}_{y}\ge 1\\ {\sigma}_{{\mathit{Mf}}_{z}}=\frac{{\mathit{Mf}}_{z}}{{I}_{y\text{corrigé}}}{R}_{y}\frac{{\mathit{isigm}}_{z}}{{\mathit{cflex}}_{z}}=\frac{{\mathit{Mf}}_{z}}{{I}_{y}}{R}_{y}{\mathit{isigm}}_{z}\mathit{où}{\mathit{isigm}}_{z}\ge 1\end{array}\) uniquement en flexion
Calcul des forces nodales et des réactions#
OPTION: “FORC_NODA”
Cette option calcule un vecteur de forces nodales sur toute la structure. Elle produit un champ aux nœuds dans la commande CALC_CHAMP par assemblage des termes élémentaires.
Pour ce calcul, on utilise habituellement en 3D [R5.03.01] par exemple le principe des travaux virtuels et on écrit:
\(F={Q}^{T}\sigma\)
où \({Q}^{T}\) représente symboliquement la matrice associée à l’opérateur divergence. Pour un élément, on écrit le travail du champ de déformations virtuelles:
\(({Q}^{T}\sigma )h={\int}_{\Omega}\sigma (u)\varepsilon (\mathrm{wh})\)
Pour les éléments de poutre, on calcule simplement les forces nodales par assemblage des forces nodales élémentaires calculées par l’option SIEF_ELGA, qui s’expriment par:
\(\left[{F}_{\text{LOC}}\right]=\left[{K}_{\text{LOC}}\right]\left[{U}_{\text{LOC}}\right][\text{§7}.1]\)
OPTION: “REAC_NODA”
Cette option, appelée par CALC_CHAMP, permet d’obtenir les réactions \(R\) aux appuis à partir des forces nodales \(F\) par:
\(R=F-{F}^{\text{char}}+{F}^{\text{iner}}\)
\({F}^{\text{char}}\text{et}{F}^{\text{iner}}\) étant les forces nodales associées aux chargements donnés (ponctuels et répartis) et aux efforts d’inertie.
Élément de barre#
Mot clé ’BARRE’
Une barre est une poutre droite de section constante ne comportant que les degrés de liberté de traction-compression. L’équation du mouvement, la matrice de rigidité et les efforts sont donc ceux des poutres (droites de section constante) relatifs à la traction-compression.
Cependant la matrice de masse doit prendre en compte les degrés de liberté dans les 3 directions de l’espace, principalement pour que dans des calculs de dynamique la masse soit prise en compte dans chaque direction (voir [V2.02.146]). Ainsi, si on note \(L\) la longueur de l’élément, \(A\) l’aire de sa section et \(\rho\) sa masse volumique, la matrice de masse élémentaire est la suivante (avec les composantes dans l’ordre \(({\mathrm{DX}}_{1}{\mathrm{DY}}_{1}{\mathrm{DZ}}_{1}{\mathrm{DX}}_{2}{\mathrm{DY}}_{2}{\mathrm{DZ}}_{2})\) ) avec \(m=\rho AL\) :
\({M}^{\mathrm{elem}}=(\begin{array}{cccccc}m/3& 0& 0& m/6& 0& 0\\ 0& m/3& 0& 0& m/6& 0\\ 0& 0& m/3& 0& 0& m/6\\ m/6& 0& 0& m/3& 0& 0\\ 0& m/6& 0& 0& m/3& 0\\ 0& 0& m/6& 0& 0& m/3\end{array})\) [11-1]
La seule caractéristique géométrique est l’aire de la section transversale [U4.42.01 §6].
Bibliographie#
[1] J.S. PRZEMIENIECKI. Theory of Matrix Structural Analysis, Mc Graw Hill, New‑York. 1968.
[2] M. GERADIN, D. RIXEN. Théorie des vibrations, application à la dynamique des structures, Masson, Paris. 1993.
[3] J.R.BANERJEE, F.W.WILLIAMS. Exact Bernoulli-Euler static stiffness matrix for a range of tappered beam-columns. Interm. J. for Numerical Methods in Engineering, vol. 23, pp1615‑1628. 1986.
[4] J.L. BATOZ, G. DHATT. Modélisation des structures par éléments finis – HERMES.
[5] V. DE VILLE DE GOYET. L’analyse statique non linéaire par la méthode des éléments finis des structures spatiales formées de poutres à sections non symétriques. Thèse de l’Université de Liège. 1989.
[6] C. MASSONNET, S. CESCOTTO. Mécanique des matériaux. Dc Boeck-Wesmael s.a. 1994.
[7] P. DESTUYNDER. Introduction au calcul des structures. Cours C. Calcul scientifique. 1990.