v5.02.133 SDNL133 – Rotor fissuré tournant, soumis à un effort de flexion#
Résumé:
L’objet de ce test est de valider la modélisation d’une fissure 1D dans un rotor. Cette fonctionnalité est disponible via l’option ROTOR_FISS de l’opérateur DYNA_VIBRA.
Le cas-test met en jeu une poutre en rotation lente soumise à un moment de flexion constant.
On compare la solution avec un calcul en 3D réalisé avec STAT_NON_LINE pour les positions extrêmes de fissure fermée et de fissure ouverte.
Solution de référence#
La solution de référence est un calcul 3D effectué avec STA_NON_LINE. On récupère par un post-traitement la déformée de la fibre neutre.
Modélisation A#
Caractéristiques de la modélisation#
Le rotor est modélisé par des éléments de poutre d’Euler (POU_D_E).
La fissure est modélisée par la fonctionnalité ROTOR_FISS de DYNA_VIBRA. La loi de comportement de fissure est entrée par une fonction, elle-même déterminée sur un barreau de diamètre unitaire, indépendante de la géométrie du rotor (cf. modélisation D).
DYNA_VIBRA calcule le transitoire sur base modale. Cette dernière n’est pas orthogonale mais constituée d’une part des modes de poutre du rotor à fissure fermée (jusqu’à \(250\text{Hz}\) ) et des premiers 2 modes de poutre à fissure ouverte.
Caractéristiques du maillage#
Nombre de mailles SEG2 |
21 |
Résultats : comparaison entre calcul 3D et calcul 1D#
On constate, en traçant le déplacement de l’extrémité de la poutre soumise au moment de flexion, que la fissure s’ouvre et se ferme selon l’angle du fond de fissure par rapport à la direction du moment exercé.
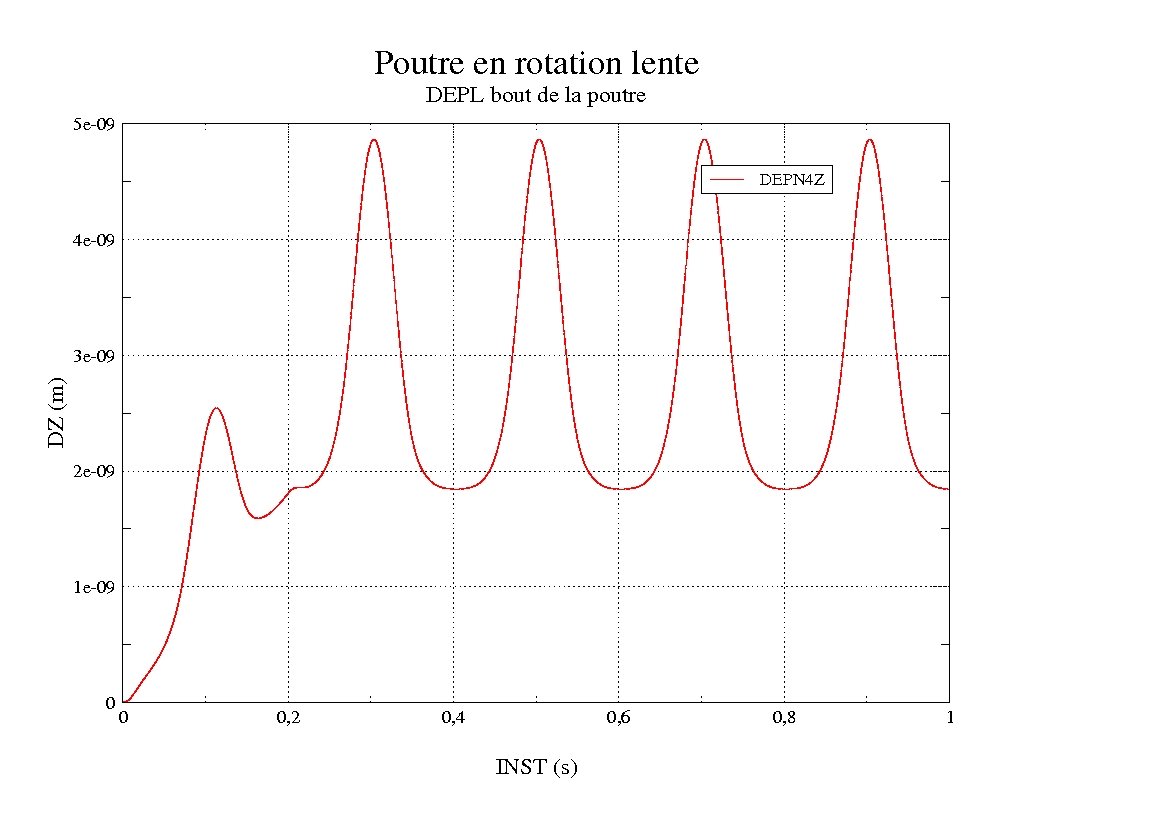
Figure 3: Déplacement de l’extrémité du rotor soumise au moment de flexion
On trace la fibre neutre de la poutre pour la fissure fermée (figure 4) et pour la fissure ouverte (figure 5). Elles sont comparables.
Le tableau donne les valeurs numériques testées dans ce cas-test. Il s’agit des déplacements en extrémité de rotor pour les situations fissure ouverte et fissure fermée.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Fissure ouverte - \(\mathit{DZ}\) en bout |
“AUTRE_ASTER” |
4.52765E-09 |
10% |
Fissure ouverte - \(\mathit{DZ}\) en bout |
“NON_REGRESSION” |
4.8308805E-09 |
0.0001% |
Fissure fermée - \(\mathit{DZ}\) en bout |
“AUTRE_ASTER” |
1.77757E-09 |
10% |
Fissure fermée - \(\mathit{DZ}\) en bout |
“NON_REGRESSION” |
1.8442025E-09 |
0.0001% |
Tableau 3.3-1 : Récapitulatif des résultats testés
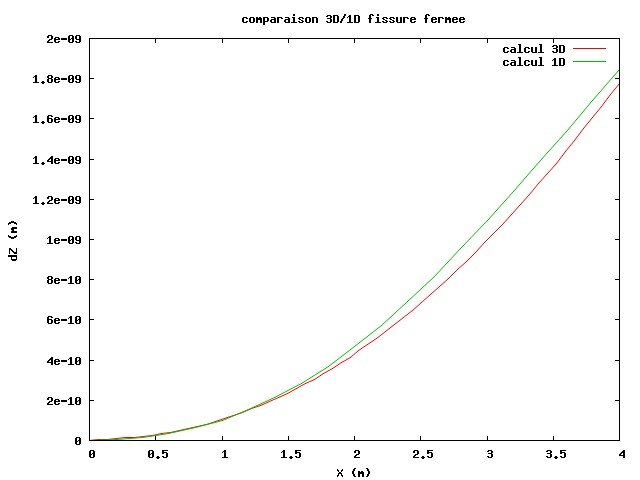
Figure 4: Comparaison 1D/3D fissure fermée
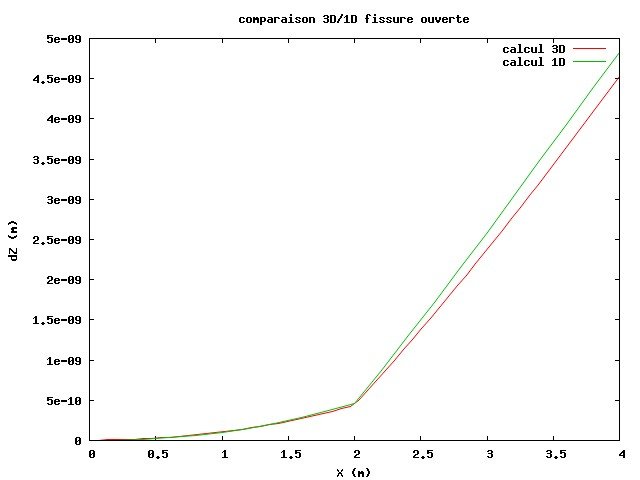
Figure 5: comparaison 1D/3D fissure ouverte
Modélisation B#
Caractéristiques de la modélisation#
La modélisation B reprend la modélisation A en tournant le modèle de \(90°\) . L’axe de rotation se retrouve selon l’axe \(Y\) .
Caractéristiques du maillage#
Nombre de mailles SEG2 |
21 |
Résultats : comparaison entre calcul 3D et calcul 1D#
On retrouve les mêmes résultats que ceux de la modélisation A, résumés dans le tableau .
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Fissure ouverte - \(\mathit{DZ}\) en bout |
“AUTRE_ASTER” |
4.52765E-09 |
10% |
Fissure ouverte - \(\mathit{DZ}\) en bout |
“NON_REGRESSION” |
4.8308805E-09 |
0.0001% |
Fissure fermée - \(\mathit{DZ}\) en bout |
“AUTRE_ASTER” |
1.77757E-09 |
10% |
Fissure fermée - \(\mathit{DZ}\) en bout |
“NON_REGRESSION” |
1.8442025E-09 |
0.0001% |
Tableau 4.3-1 : Récapitulatif des résultats testés
Modélisation C#
Caractéristiques de la modélisation#
La modélisation C reprend la modélisation A . La différence est l’imposition d’un transitoire de vitesse au rotor fissuré tournant par le biais d’une loi linéaire de vitesse de rotation.
Caractéristiques du maillage#
Nombre de mailles SEG2 |
21 |
Résultats : comparaison entre calcul 3D et calcul 1D#
On retrouve les mêmes résultats que ceux de la modélisation A, résumés dans le tableau .
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Fissure ouverte - \(\mathit{DZ}\) en bout |
“AUTRE_ASTER” |
4.52765E-09 |
10% |
Fissure ouverte - \(\mathit{DZ}\) en bout |
“NON_REGRESSION” |
4.8308805E-09 |
0.0001% |
Fissure fermée - \(\mathit{DZ}\) en bout |
“AUTRE_ASTER” |
1.77757E-09 |
10% |
Fissure fermée - \(\mathit{DZ}\) en bout |
“NON_REGRESSION” |
1.8442025E-09 |
0.0001% |
Tableau 5.3-1 : Récapitulatif des résultats testés
Modélisation D#
Caractéristiques de la modélisation#
Comme précisé précédemment, la caractérisation du comportement du rotor fissuré nécessite la réalisation d’un modèle tridimensionnel de poutre fissurée en flexion bi-axée.
Cette modélisation D permet de capitaliser la procédure de maillage d’un cylindre standard fissuré ainsi que le script python permettant d’identifier les lois caractérisant le comportement du rotor fissuré étudié dans les modélisations A, B et C.
On considère un élément de rotor de module d’Young \(E\) , d’inertie quadratique \(I\) (identique dans toutes les directions du plan de section) et de longueur \(2L=4m\) et de diamètre \(D=1m\) renfermant dans sa section médiane une fissure transverse à fond droit de profondeur 65%.
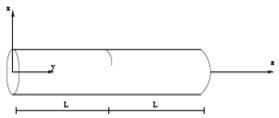
Figure 6: éprouvette fissurée unitaire
Un calcul statique non linéaire est réalisé avec Code_Aster pour 36 pas de chargement en faisant évoluer l’orientation \({\Phi}_{i}\) du moment avec un pas de \(10°\) de manière à parcourir l’intervalle complet \([0°-360°]\) . Le post-traitement est réalisé par un script Python qui exploite le fichier de résultats issu de Code_Aster . À partir des rotations suivant \(X\) et \(Y\) de l’extrémité du cylindre sous chargement tournant imposé pour chaque instant de calcul, le script Python permet de calculer l’énergie de déformation, la souplesse associée aux déformations du cylindre fissuré, la rigidité locale ainsi que sa dérivée.
Les courbes adimensionnées de raideur et dérivée obtenues dépendent de l’orientation \(\Phi\) des efforts appliqués par rapport à la position angulaire de la fissure .
Caractéristiques du maillage#
Le maillage contient 6315 nœuds et 6720 mailles.
Nombre de mailles POI1 |
17 |
Nombre de mailles SEG2 |
77 |
Nombre de mailles TRIA3 |
94 |
Nombre de mailles QUAD4 |
932 |
Nombre de mailles PENTA6 |
480 |
Nombre de mailles HEXA8 |
5120 |
Résultats : Loi de comportement de fissure 1D#
La loi de comportement de la fissure 1D est tracée sur la figure ci-dessous.
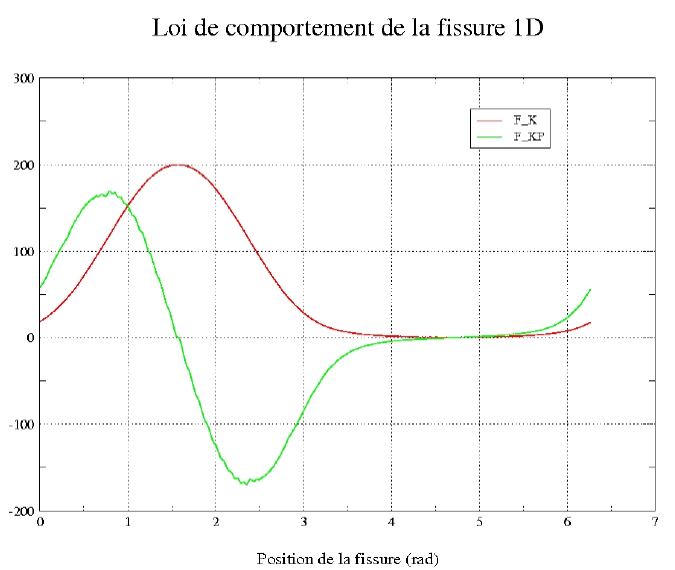
Figure 7: Loi de comportement de la fissure 1D
Synthèse des résultats#
Le cas-test met en œuvre la rotation lente d’une poutre fissurée, encastrée à un bout et soumise à un moment de flexion à l’autre. La modélisation 1D de rotor fissuré programmé dans DYNA_VIBRA est ainsi validée par rapport aux résultats obtenus en statique avec le modèle équivalent 3D.