v6.04.247 SSNV247 - Application d’une pression répartie sur les lèvres d’une interface XFEM courbe traversant une calotte sphérique#
Résumé:
Il s’agit d’un test de validation des facettes de contact issues des sous éléments d’intégration XFEM.
Les facettes de contact utilisées par défaut ne sont pas issues des sous éléments d’intégration et ne donnent pas la possibilité d’avoir des facettes de contact quadratiques en 3D. On peut activer la récupération des facettes de contact issues des sous éléments d’intégration dans l’opérateur MODI_MODELE_XFEM avec le mot-clef DECOUPE_FACETTE=”SOUS_ELEMENTS”. On dispose alors de facettes linéaires et quadratiques en 2D comme en 3D qui présentent l’avantage d’être conformes aux sous éléments d’intégration puisqu’elles sont choisies parmi les côtés des sous éléments d’intégration en 2D et les faces des sous éléments d’intégration en 3D. Ce mode de récupération présente également l’avantage suivant: les coordonnées des nœuds de ces facettes ne sont pas recalculées comme c’est le cas par défaut, car ces nœuds sont récupérés lors du découpage qui est effectué dans TOPOSE.
Dans le présent test, on s’assure du bon fonctionnement de la récupération de ces facettes lorsqu’une pression mécanique est appliquée sur les lèvres d’une interface pour une géométrie tridimensionnelle. Les résultats obtenus sont comparés à une solution analytique. On choisit volontairement une iso-zéro «lsn» courbe représentant l’interface pour apprécier le gain de performance apporté par la «facétisation» quadratique.
Solution de référence#
Méthode de calcul#
Il s’agit d’une solution analytique. Compte tenu des conditions aux limites, les déplacements peuvent être obtenus à partir de la résolution analytique de l’équation de conservation de la quantité de mouvement.
En négligeant la pesanteur, l’équation s’écrit (en contraintes totales):
\(\text{Div}(\sigma )=0\)
Le module de Poisson \(\nu\) étant nul, et étant dans le cas élastique, on a \(\sigma =Eϵ\) .
Le volume étudié est à symétrie sphérique, constitué d’un matériau homogène et isotrope; les conditions aux limites possèdent aussi la symétrie sphérique. On est donc amené à chercher une solution du problème dans un système de coordonnées sphériques \((r,\theta ,\varphi )\) tel que les champs de déplacement, de contrainte et de déformation soient respectivement de la forme:
\(\lbrace \begin{array}{c}{u}_{\text{r}}=h(r)\\ {u}_{\theta}={u}_{\varphi}=0\end{array}\) \(\lbrace \begin{array}{c}{\sigma}_{\text{rr}}={f}_{1}(r)\\ \begin{array}{c}{\sigma}_{\theta \theta }={\sigma}_{\varphi \varphi }={g}_{1}(r)\\ {\sigma}_{r\theta }={\sigma}_{r\varphi }={\sigma}_{\theta \varphi }=0\end{array}\end{array}\) \(\lbrace \begin{array}{c}{ϵ}_{\text{rr}}={f}_{2}(r)\\ \begin{array}{c}{ϵ}_{\theta \theta }={ϵ}_{\varphi \varphi }={g}_{2}(r)\\ {ϵ}_{r\theta }={ϵ}_{r\varphi }={ϵ}_{\theta \varphi }=0\end{array}\end{array}\)
L’équation d’équilibre \(\text{Div}(\sigma )=0\) se réduit alors à: \(\frac{d{\sigma}_{\text{rr}}}{\mathit{dr}}+\frac{2}{r}\ast ({\sigma}_{\text{rr}}-{\sigma}_{\theta \theta })=0\)
Les conditions aux limites statiques sont de la forme: \({\sigma}_{\text{rr}}(R)=-p\)
Les équations cinématiques ont la forme: \(\lbrace \begin{array}{c}{ϵ}_{\text{rr}}=\frac{{\mathit{du}}_{\text{r}}}{\mathit{dr}}\\ {ϵ}_{\theta \theta }=\frac{{u}_{\text{r}}}{r}\end{array}\) soit finalement: \(\lbrace \begin{array}{c}{\sigma}_{\text{rr}}=E\ast \frac{{\mathit{du}}_{\text{r}}}{\mathit{dr}}\\ {\sigma}_{\theta \theta }=E\ast \frac{{u}_{\text{r}}}{r}\end{array}\)
En substituant ces deux relations dans l’équation d’équilibre on obtient:
\(\frac{\mathit{d²}{u}_{\text{r}}}{\mathit{dr²}}+\frac{2}{r}\ast (\frac{{\mathit{du}}_{\text{r}}}{\mathit{dr}}-\frac{{u}_{\text{r}}}{r})=0\) soit \(\frac{d}{\mathit{dr}}(\frac{1}{\mathit{r²}}\frac{d({\mathit{r²u}}_{r})}{\mathit{dr}})=0\)
La solution de cette équation différentielle est: \({u}_{r}(r)={C}_{1}r+\frac{{C}_{2}}{\mathit{r²}}\) . La solution cherchée étant discontinue en \(R\) , on résout cette équation séparément sur les deux domaines \([{R}_{i},R]\) et \([R,{R}_{e}]\) .
Finalement: \(\lbrace \begin{array}{c}{u}_{\text{r}}(r)={C}_{1}r+\frac{{C}_{2}}{\mathit{r²}}\text{}\mathit{sur}[{R}_{i},R]\\ {u}_{r}(r)={C}_{3}r+\frac{{C}_{4}}{\mathit{r²}}\text{}\mathit{sur}[R,{R}_{e}]\end{array}\)
D’après les conditions aux limites cinématiques, \({u}_{r}({R}_{i})={u}_{r}({R}_{e})=0\) donc \(\lbrace \begin{array}{c}{C}_{1}{R}_{i}+\frac{{C}_{2}}{{R}_{i}\mathrm{²}}=0\\ {C}_{3}{R}_{e}+\frac{{C}_{4}}{{R}_{e}\mathrm{²}}=0\end{array}\)
Par ailleurs \({\sigma}_{\text{rr}}=E\ast \frac{{\mathit{du}}_{\text{r}}}{\mathit{dr}}=\lbrace \begin{array}{c}E\ast {C}_{1}-2E\ast \frac{{C}_{2}}{\mathit{r³}}\text{}\mathit{sur}[{R}_{i},R]\\ E\ast {C}_{3}-2E\ast \frac{{C}_{4}}{\mathit{r³}}\text{}\mathit{sur}[R,{R}_{e}]\end{array}\) donc d’après les conditions aux limites statiques: \(\lbrace \begin{array}{c}{C}_{1}-2\ast \frac{{C}_{2}}{\mathit{R³}}=-\frac{p}{E}\\ {C}_{3}-2\ast \frac{{C}_{4}}{\mathit{R³}}=-\frac{p}{E}\end{array}\) .
La résolution du système donne \(\lbrace \begin{array}{c}\begin{array}{c}{C}_{1}=\frac{-p}{E\ast (2\ast \frac{{R}_{i}\mathrm{³}}{R\mathrm{³}}+1)}\\ {C}_{2}=\frac{p}{E\ast (\frac{2}{\mathit{R³}}+\frac{1}{{R}_{i}\mathrm{³}})}\end{array}\\ \begin{array}{c}{C}_{3}=\frac{-p}{E\ast (2\ast \frac{{R}_{e}\mathrm{³}}{R\mathrm{³}}+1)}\\ {C}_{4}=\frac{p}{E\ast (\frac{2}{\mathit{R³}}+\frac{1}{{R}_{e}\mathrm{³}})}\end{array}\end{array}\)
Grandeurs et résultats de référence#
On teste la valeur des déplacements radiaux de part et d’autres de l’interface.
Grandeurs testées |
Type de référence |
Valeur de référence |
UR(en dessous) |
“ANALYTIQUE” |
-0.0001142742582 |
UR(en dessus) |
“ANALYTIQUE” |
6.173526141E-05 |
Incertitudes sur la solution#
Aucune, la solution est analytique.
Modélisation A#
Caractéristiques de la modélisation#
Il s’agit d’une modélisation 3D utilisant des éléments XFEM linéaires.
Caractéristiques du maillage#
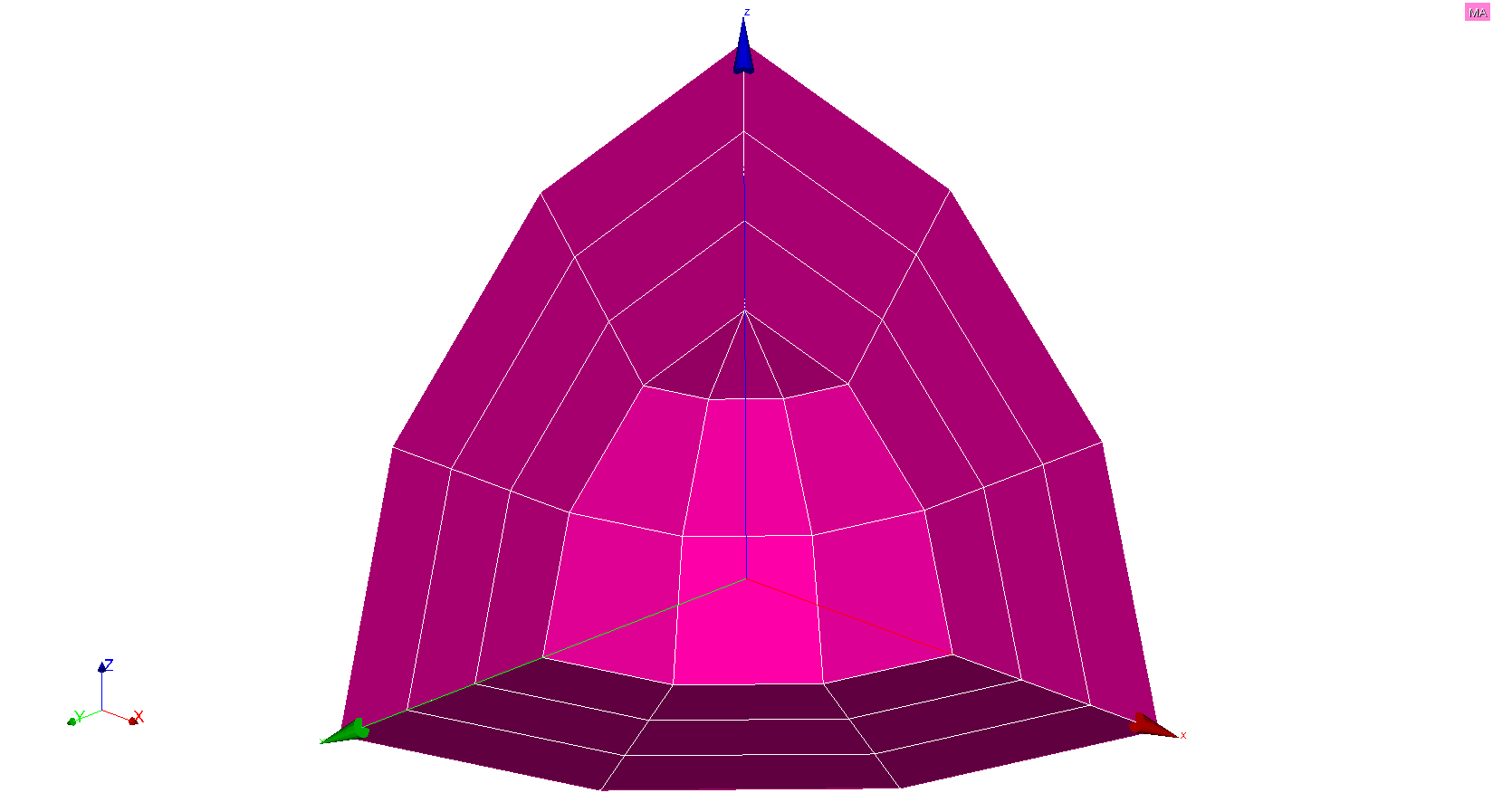
La calotte sphérique sur laquelle on effectue la modélisation est divisé en 18 HEXA8 et 9 PENTA6. L’interface est non maillée et coupe la calotte dans son épaisseur. Le maillage est représenté Figure .
Figure 3.2-a : Maillage 3D linéaire
Grandeurs testées et résultats#
Les résultats sont obtenus avec Code_Aster (résolution avec STAT_NON_LINE). On teste les déplacements radiaux \({u}_{r}\) sur les lèvres de la fissure. Pour chaque fissure, on teste le MIN et le MAX de ces deux grandeurs pour tous les nœuds de la fissure. Les résultats obtenus sont synthétisés dans le tableau ci-dessous.
Grandeurs testées |
Type de référence |
Valeurs analytiques |
Tolérance (%) |
DR(int) MIN |
“ANALYTIQUE” |
-0.0001142742582 |
|
DR(int) MAX |
“ANALYTIQUE” |
-0.0001142742582 |
|
DR(ext) MIN |
“ANALYTIQUE” |
6.173526141E-05 |
|
DR(ext) MAX |
“ANALYTIQUE” |
6.173526141E-05 |
Le déplacement radial \({u}_{r}\) et la déformée sont représentés sur la Figure . On observe une discontinuité nette des déplacements et la symétrie sphérique des champs.
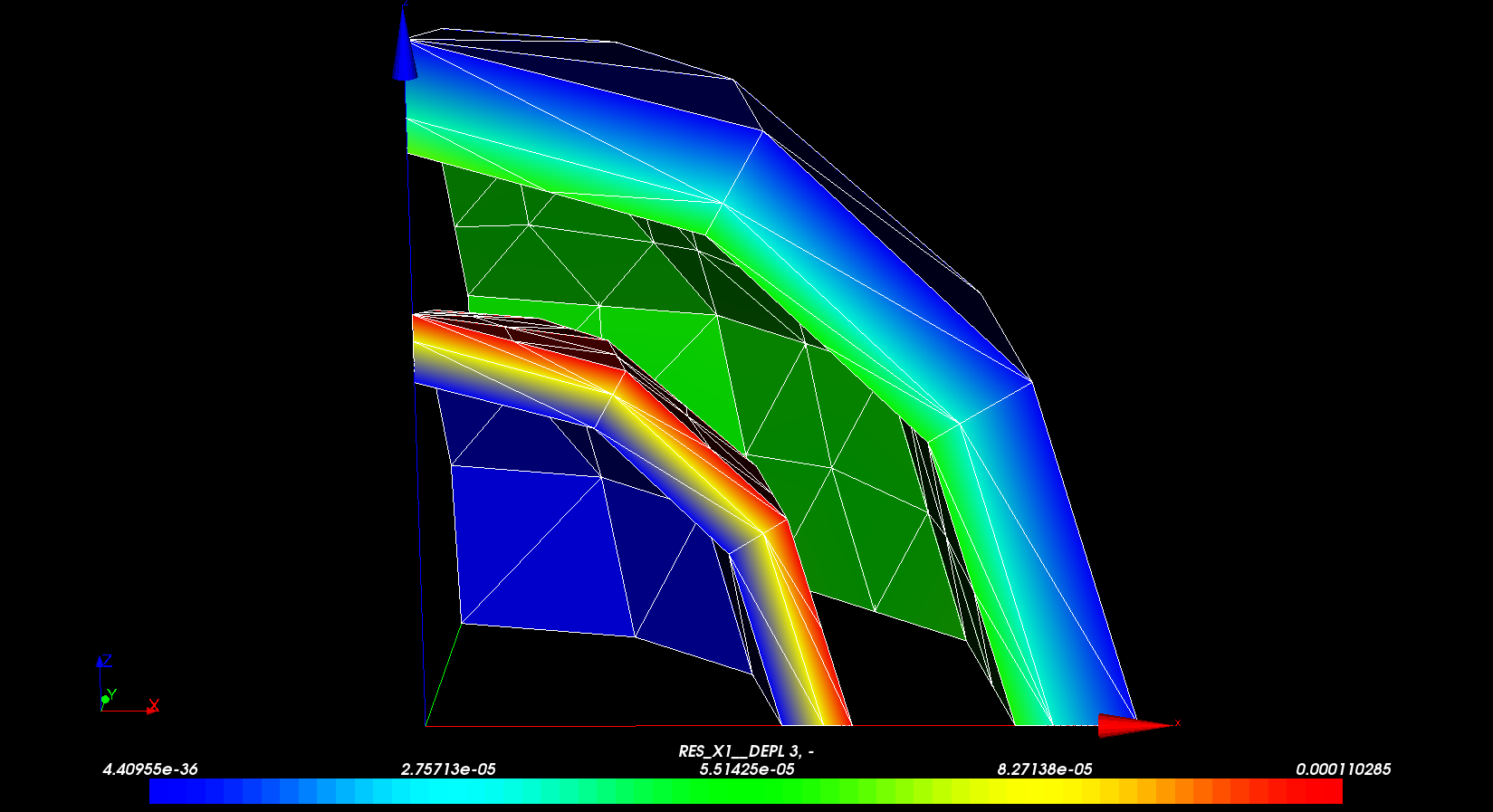
Figure 3.3-a : Champ de déplacement radial
Les écarts constatés avec la solution analytique sont à mettre en perspective avec la pauvreté du maillage utilisé. On utilise uniquement 3 mailles dans l’épaisseur de la calotte et dans les directions longitudinales et méridionales.
Modélisation B#
Caractéristiques de la modélisation#
Cette modélisation est strictement identique à la précédente, à l’exception des éléments utilisés qui sont quadratiques.
Caractéristiques du maillage#
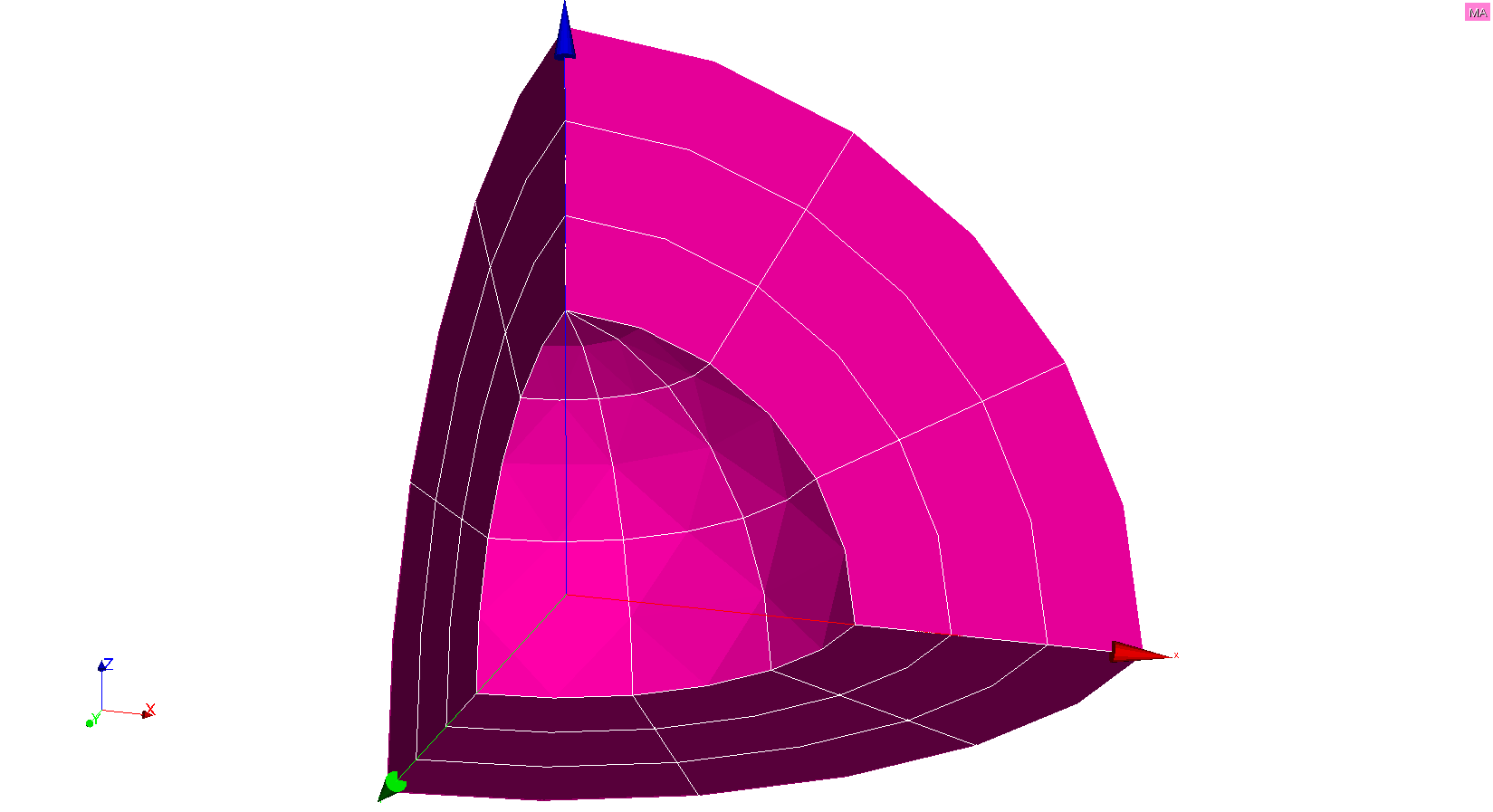
La calotte sur laquelle on effectue la modélisation est divisé en 18 HEXA20 et 9 PENTA15. L’interface est non maillée et coupe la calotte dans son épaisseur. Le maillage est représenté Figure .
Figure 4.2-a : Maillage 3D quadratique
Grandeurs testées et résultats#
Les résultats sont obtenus avec Code_Aster (résolution avec STAT_NON_LINE). On teste les déplacements radiaux \({u}_{r}\) sur les lèvres de la fissure. Pour chaque fissure, on teste le MIN et le MAX de ces deux grandeurs pour tous les nœuds de la fissure. Les résultats obtenus sont synthétisés dans le tableau ci-dessous.
Grandeurs testées |
Type de référence |
Valeurs analytiques |
Tolérance (%) |
DR(int) MIN |
“ANALYTIQUE” |
-0.0001142742582 |
|
DR(int) MAX |
“ANALYTIQUE” |
-0.0001142742582 |
|
DR(ext) MIN |
“ANALYTIQUE” |
6.173526141E-05 |
|
DR(ext) MAX |
“ANALYTIQUE” |
6.173526141E-05 |
Le déplacement radial \({u}_{r}\) et la déformée sont représentés sur la Figure . On observe une discontinuité nette des déplacements et la symétrie sphérique des champs.
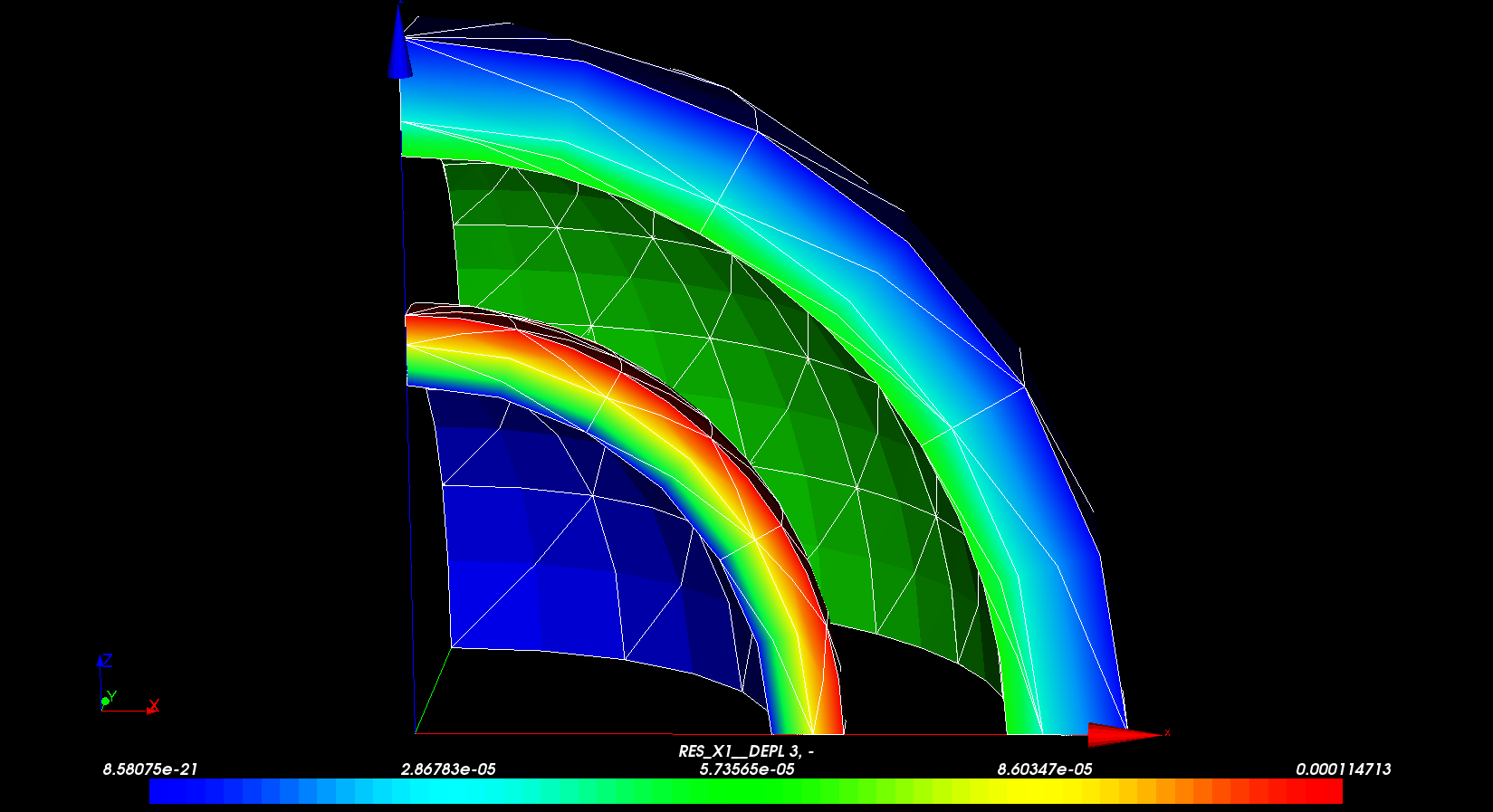
Figure 4.3-a : Champ de déplacement radial
Avec le même nombre de mailles que dans la modélisation précédente, on obtient des résultats nettement plus précis (on gagne un facteur 10 en précision sur les déplacements). Ces deux modélisations illustrent encore une fois l’apport considérable des éléments quadratiques par rapport aux éléments linéaires. Les résultats obtenus dans cette dernière modélisation sont tout à fait satisfaisants, surtout au regard du faible nombre de mailles utilisées et de la courbure de la lsn.
Conclusion#
Les 2 modélisations valident l’utilisation des facettes de contact issues des sous éléments d’intégration XFEM pour l’application d’efforts mécaniques sur les lèvres d’une interface non maillée en 3D. Elles illustrent également le gain de précision obtenu avec des éléments quadratiques par rapport à des éléments linéaires.