v6.05.115 SSNS115 - Gonflement d’une membrane souple#
Résumé:
L’objectif de ce test est de valider le fonctionnement de l’élément MEMBRANE en grandes déformations pour deux lois de comportement hyperélastiques et différents types de mailles (linéaire, quadratique et bi-quadratique). On considère donc le gonflement d’un disque soumis à une pression suiveuse et on compare les résultats à des solutions tirées de la littérature.
Solution de référence#
Méthode de calcul#
Nous ne disposons pas de solution analytique exacte pour ce problème. Les solutions de référence sont tirées de la littérature (cf. 1 , p.262). Ce sont des solutions numériques obtenues par des calculs éléments finis.
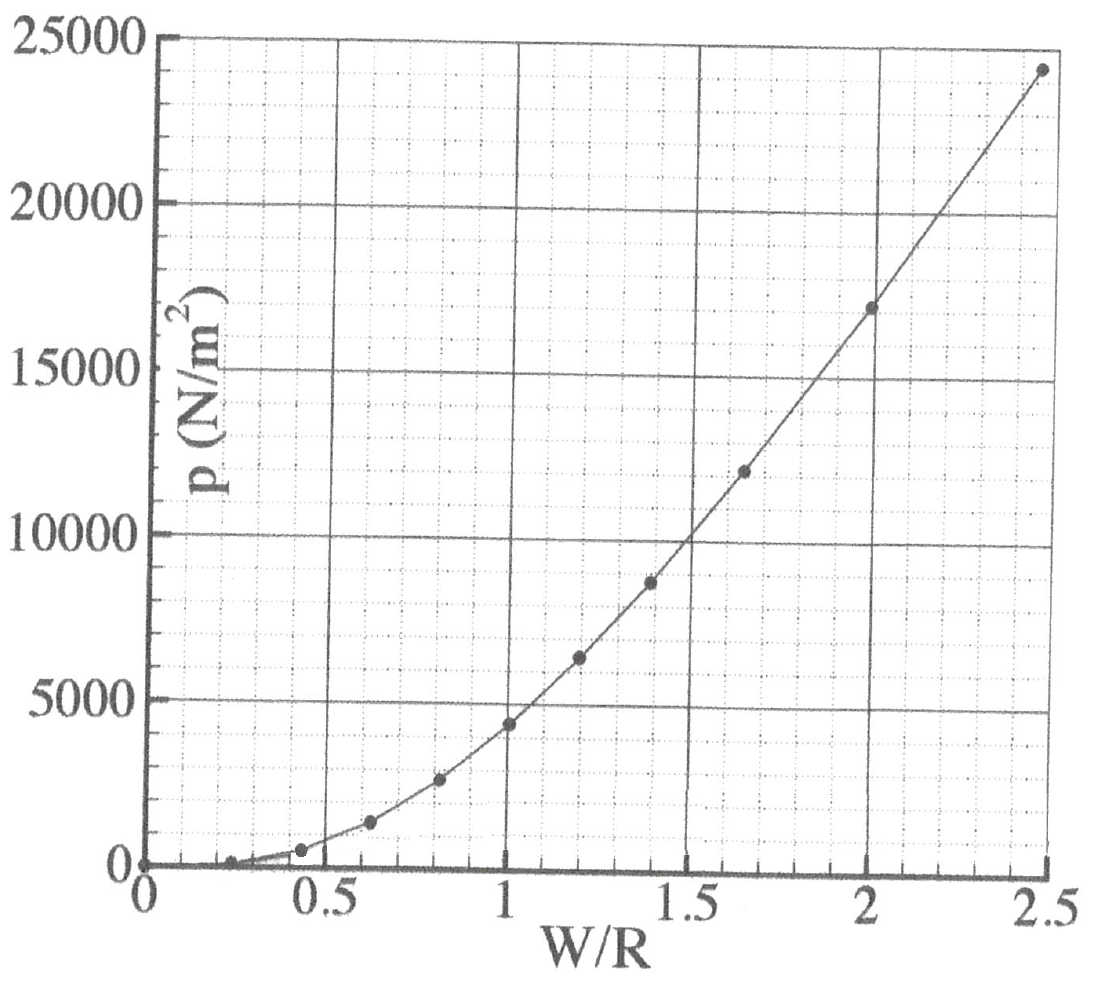
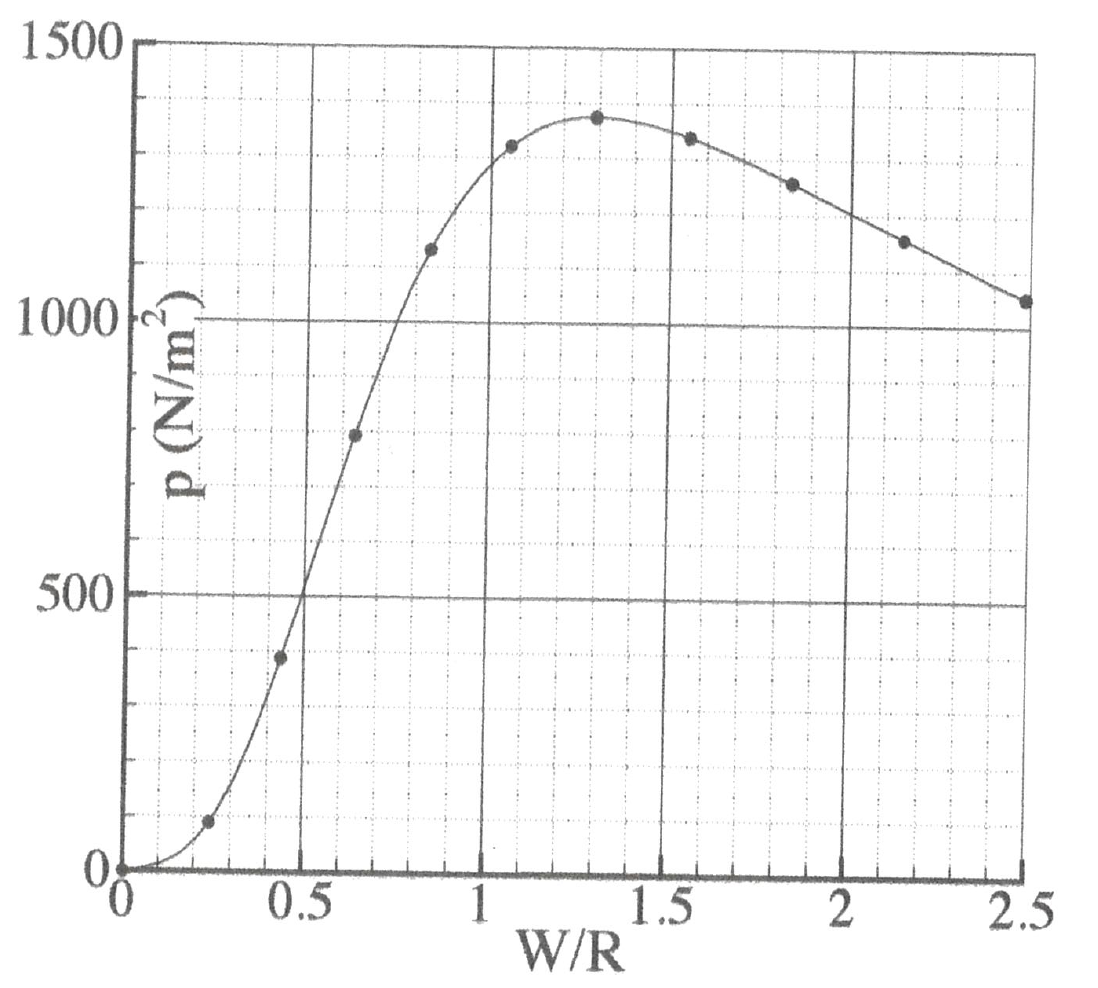
Figure 2.1-a: Courbes de références pour les lois de Saint Venant Kirchhoff (à gauche) et Néo-Hookéenne (à droite).
Grandeurs et résultats de référence#
Pour la loi de Saint Venant Kirchhoff, on teste le déplacement vertical au point O à l’instant final. Le déplacement est obtenu sur la courbe de gauche de la figure 2.1-a:
Grandeur |
Identification |
Loi de comportement |
Solution de référence |
Déplacement |
Instant 1.0 - Point \(O\) - \(\mathit{DZ}\) |
Saint Venant Kirchhoff |
2448 \(\mathit{mm}\) |
Pour la loi de comportement Néo-Hookéenne, les pressions sont interpolées àchaque instant de calcul sur la courbe de droitede la figure 2.1-a:
Grandeur |
Identification |
Loi de comportement |
Solution de référence |
Pression |
Instant 0.1 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
Néo-Hookéenne |
109.55 \(N/{m}^{2}\) |
Pression |
Instant 0.2 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
Néo-Hookéenne |
531.73 \(N/{m}^{2}\) |
Pression |
Instant 0.3 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
Néo-Hookéenne |
995.8 \(N/{m}^{2}\) |
Pression |
Instant 0.4 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
Néo-Hookéenne |
1276.2 \(N/{m}^{2}\) |
Pression |
Instant 0.5 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
Néo-Hookéenne |
1366.9 \(N/{m}^{2}\) |
Pression |
Instant 0.6 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
Néo-Hookéenne |
1344.7 \(N/{m}^{2}\) |
Pression |
Instant 0.7 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
Néo-Hookéenne |
1280.6 \(N/{m}^{2}\) |
Pression |
Instant 0.8 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
Néo-Hookéenne |
1203.0 \(N/{m}^{2}\) |
Pression |
Instant 0.9 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
Néo-Hookéenne |
1124.4 \(N/{m}^{2}\) |
Pression |
Instant 1.0 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
Néo-Hookéenne |
1049.0 \(N/{m}^{2}\) |
Incertitudes sur la solution#
La solution de référence est numérique. Le maillage de référence est composé de 196 éléments de type QUAD8.
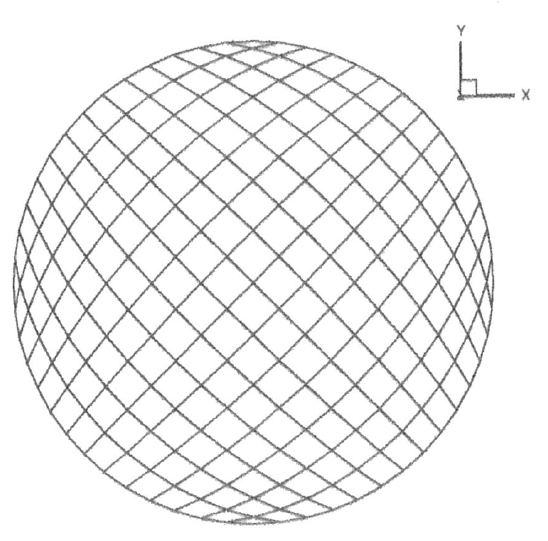
Figure 2.3-a: Maillage de la solution de référence.
Certains écarts sur les solutions obtenues peuvent s’expliquer par des différences de maillages. De plus, le relevé des valeurs s’est fait via le logiciel G3Data Graph Analyzer sur un scan d’un graphique contenu dans l’ouvrage de référence. L’incertitude est donc directement liée à la qualité et à la précision d’impression de l’ouvrage, ainsi qu’à la précision des pointages effectués.
Références bibliographiques#
LE VAN: Coques et membranes, fondement de l’approche non linéaire. Technosup (2014).
Modélisation A#
Caractéristiques de la modélisation#
On utilise une modélisation MEMBRANE en grandes déformations (DEFORMATION=”GROT_GDEP”) avec la loi de comportement de Saint Venant Kirchhoff (RELATION=”ELAS_MEMBRANE_SV”). On utilise des éléments linéaires.
Caractéristiques du maillage#
Le maillage contient 108 éléments de type QUAD4 et 14 de type TRIA3.
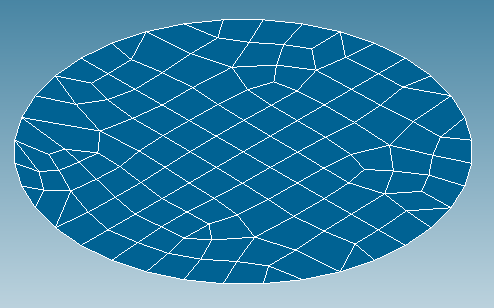
Figure 3.2-a: Maillage de la membrane.
Grandeurs testées et résultats#
On teste le déplacement au centre du disque, en O.
Identification |
Type de référence |
Valeur de référence (\(\mathit{mm}\) ) |
Précision |
Point \(O\) - \(\mathit{DZ}\) |
“SOURCE_EXTERNE” |
2448 |
1,5% |
Remarques#
On a utilisé la recherche linéaire (RECH_LINEAIRE) pour atteindre la convergence.
Modélisation B#
Caractéristiques de la modélisation#
On utilise une modélisation MEMBRANE en grandes déformations (DEFORMATION=”GROT_GDEP”) avec la loi de comportement de Saint Venant Kirchhoff (RELATION=”ELAS_MEMBRANE_SV”). On utilise des éléments quadratiques.
Caractéristiques du maillage#
Le maillage est le même que pour la modélisation A mais en quadratique. Il contient 108 éléments de type QUAD8 et 14 de type TRIA6.
Grandeurs testées et résultats#
On teste le déplacement au centre du disque, en O.
Identification |
Type de référence |
Valeur de référence (\(\mathit{mm}\) ) |
Précision |
Point \(O\) - \(\mathit{DZ}\) |
“SOURCE_EXTERNE” |
2448 |
2% |
Remarques#
On a utilisé la recherche linéaire (RECH_LINEAIRE) pour atteindre la convergence.
Modélisation C#
Caractéristiques de la modélisation#
On utilise une modélisation MEMBRANE en grandes déformations (DEFORMATION=”GROT_GDEP”) avec la loi de comportement de Saint Venant Kirchhoff (RELATION=”ELAS_MEMBRANE_SV”). On utilise des éléments bi-quadratiques.
Caractéristiques du maillage#
Le maillage est le même que pour la modélisation B mais en bi-quadratique. Il contient 108 éléments de type QUAD9 et 14 de type TRIA7.
Grandeurs testées et résultats#
On teste le déplacement au centre du disque, en O.
Identification |
Type de référence |
Valeur de référence (\(\mathit{mm}\) ) |
Précision |
Point \(O\) - \(\mathit{DZ}\) |
“SOURCE_EXTERNE” |
2448 |
1,5% |
Remarques#
On a utilisé la recherche linéaire (RECH_LINEAIRE) pour atteindre la convergence.
Modélisation D#
Caractéristiques de la modélisation#
On utilise une modélisation MEMBRANE en grandes déformations (DEFORMATION=”GROT_GDEP”) avec la loi de comportement néo-Hookéenne (RELATION=”ELAS_MEMBRANE_NH”). On utilise des éléments linéaires.
Caractéristiques du maillage#
Le maillage est le même que pour la modélisation A.
Grandeurs testées et résultats#
On teste la pression appliquée au cours du chargement.
Identification |
Type de référence |
Valeur de référence |
Précision |
Instant 0.1 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
109.55 \(N/{m}^{2}\) |
7% |
Instant 0.2 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
531.73 \(N/{m}^{2}\) |
3% |
Instant 0.3 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
995.8 \(N/{m}^{2}\) |
2% |
Instant 0.4 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1276.2 \(N/{m}^{2}\) |
3% |
Instant 0.5 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1366.9 \(N/{m}^{2}\) |
3% |
Instant 0.6 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1344.7 \(N/{m}^{2}\) |
4% |
Instant 0.7 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1280.6 \(N/{m}^{2}\) |
5% |
Instant 0.8 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1203.0 \(N/{m}^{2}\) |
6% |
Instant 0.9 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1124.4 \(N/{m}^{2}\) |
6% |
Instant 1.0 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1049.0 \(N/{m}^{2}\) |
7% |
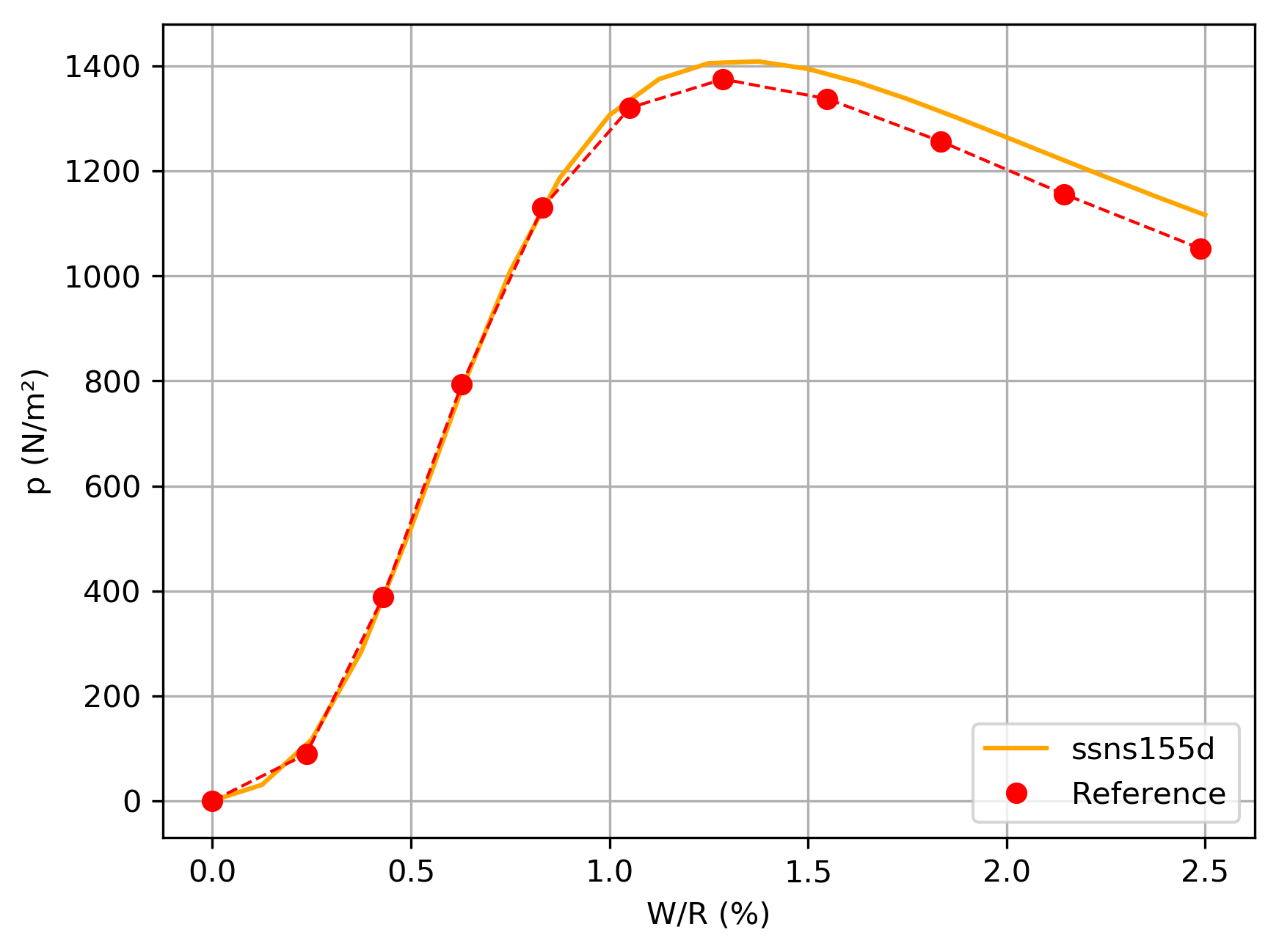
Figure 6.2-a: Résultats de la modélisation D vs référence numérique de la figure 2.1 -a.
Figure 6.2-b: État initial (à gauche), déformée à l’instant 0.5 (au centre) et déformée à l’état final (à droite).
Remarques#
On a utilisé le pilotage en déplacement (SUIV_PILO ) pour atteindre la convergence. La loi de comportement néo-Hookéenne fait apparaître un snap-through à environ 1,4kPa. Cela entraîne de fortes non-linéarités autour de cette valeur que l’on peut surmonter via le pilotage de la pression suiveuse.
Le maillage est environ 2 fois plus grossier que celui de la référence et les mailles sont linéaires et non quadratiques. Cela explique les écarts observés face à la solution de référence pour cette modélisation.
Modélisation E#
Caractéristiques de la modélisation#
On utilise une modélisation MEMBRANE en grandes déformations (DEFORMATION=”GROT_GDEP”) avec la loi de comportement néo-Hookéenne (RELATION=”ELAS_MEMBRANE_NH”). On utilise des éléments quadratiques.
Caractéristiques du maillage#
Le maillage est le même que pour la modélisation B.
Grandeurs testées et résultats#
On teste la pression appliquée au cours du chargement.
Identification |
Type de référence |
Valeur de référence |
Précision |
Instant 0.1 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
109.55 \(N/{m}^{2}\) |
7% |
Instant 0.2 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
531.73 \(N/{m}^{2}\) |
3% |
Instant 0.3 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
995.8 \(N/{m}^{2}\) |
1% |
Instant 0.4 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1276.2 \(N/{m}^{2}\) |
1% |
Instant 0.5 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1366.9 \(N/{m}^{2}\) |
0.4% |
Instant 0.6 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1344.7 \(N/{m}^{2}\) |
0.4% |
Instant 0.7 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1280.6 \(N/{m}^{2}\) |
0.3% |
Instant 0.8 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1203.0 \(N/{m}^{2}\) |
0.1% |
Instant 0.9 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1124.4 \(N/{m}^{2}\) |
0.1% |
Instant 1.0 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1049.0 \(N/{m}^{2}\) |
0.1% |
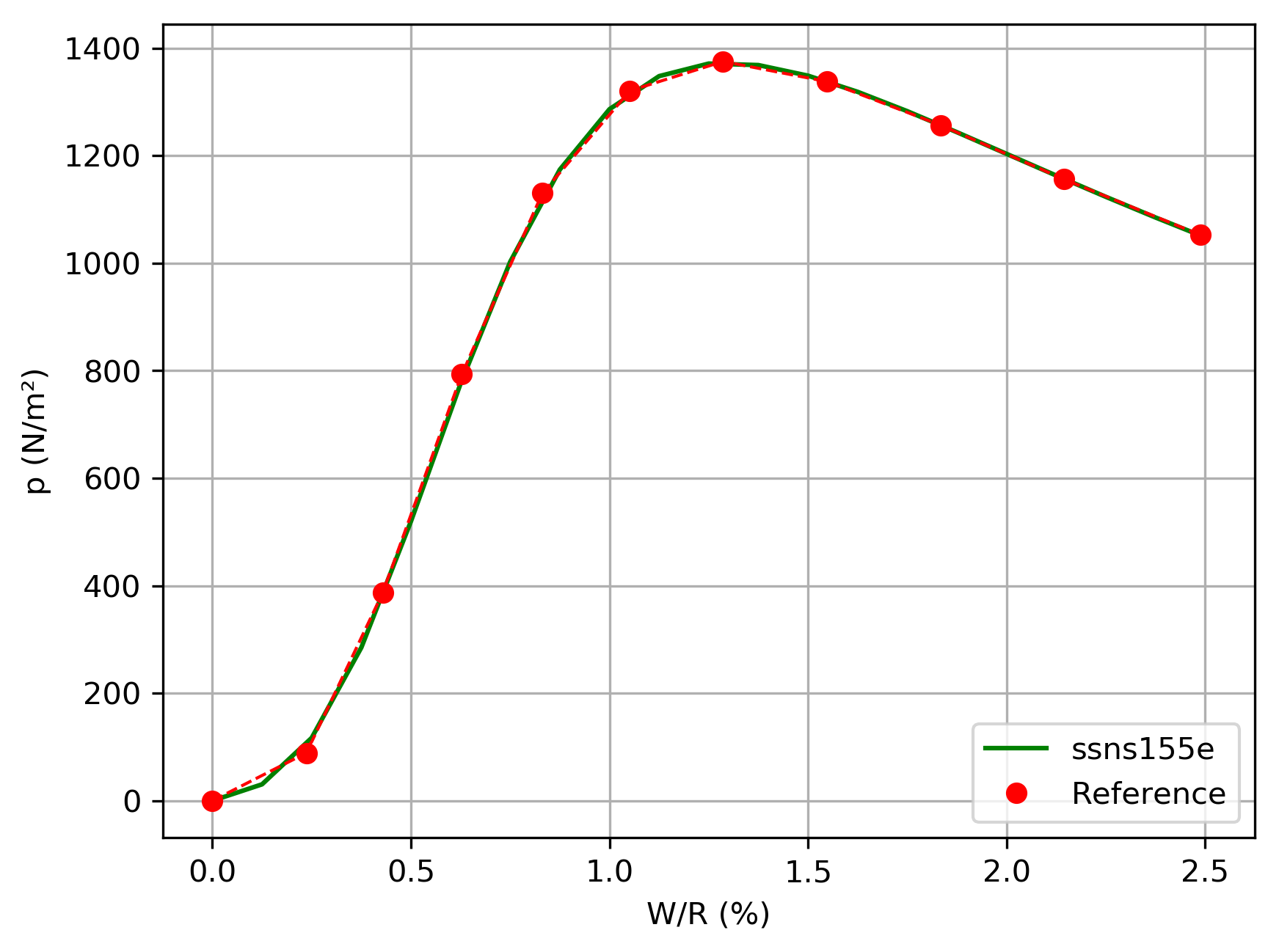
Figure 6.2 -a: Résultats de la modélisation E vs référence numérique de la figure 2.1 -a.
Remarques#
On a utilisé le pilotage en déplacement (SUIV_PILO ) comme pour la modélisation D.
Contrairement à la modélisation D, les mailles sont quadratiques, donc de même type que pour la solution de référence. On remarque que les résultats sont alors beaucoup plus précis par rapport à la solution de référence, ce qui est très satisfaisant compte tenu du fait que e maillage estenviron 2 fois plus grossier.
Modélisation F#
Caractéristiques de la modélisation#
On utilise une modélisation MEMBRANE en grandes déformations (DEFORMATION=”GROT_GDEP”) avec la loi de comportement néo-Hookéenne (RELATION=”ELAS_MEMBRANE_NH”). On utilise des éléments bi-quadratiques.
Caractéristiques du maillage#
Le maillage est le même que pour la modélisation C.
Grandeurs testées et résultats#
On teste la pression appliquée au cours du chargement.
Identification |
Type de référence |
Valeur de référence |
Précision |
Instant 0.1 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
109.55 \(N/{m}^{2}\) |
8% |
Instant 0.2 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
531.73 \(N/{m}^{2}\) |
2% |
Instant 0.3 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
995.8 \(N/{m}^{2}\) |
2% |
Instant 0.4 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1276.2 \(N/{m}^{2}\) |
2% |
Instant 0.5 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1366.9 \(N/{m}^{2}\) |
0.7% |
Instant 0.6 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1344.7 \(N/{m}^{2}\) |
0.6% |
Instant 0.7 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1280.6 \(N/{m}^{2}\) |
0.4% |
Instant 0.8 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1203.0 \(N/{m}^{2}\) |
0.3% |
Instant 0.9 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1124.4 \(N/{m}^{2}\) |
0.1% |
Instant 1.0 - \(\mathit{ETA}\text{\_}\mathit{PILO}\) |
“SOURCE_EXTERNE” |
1049.0 \(N/{m}^{2}\) |
0.1% |
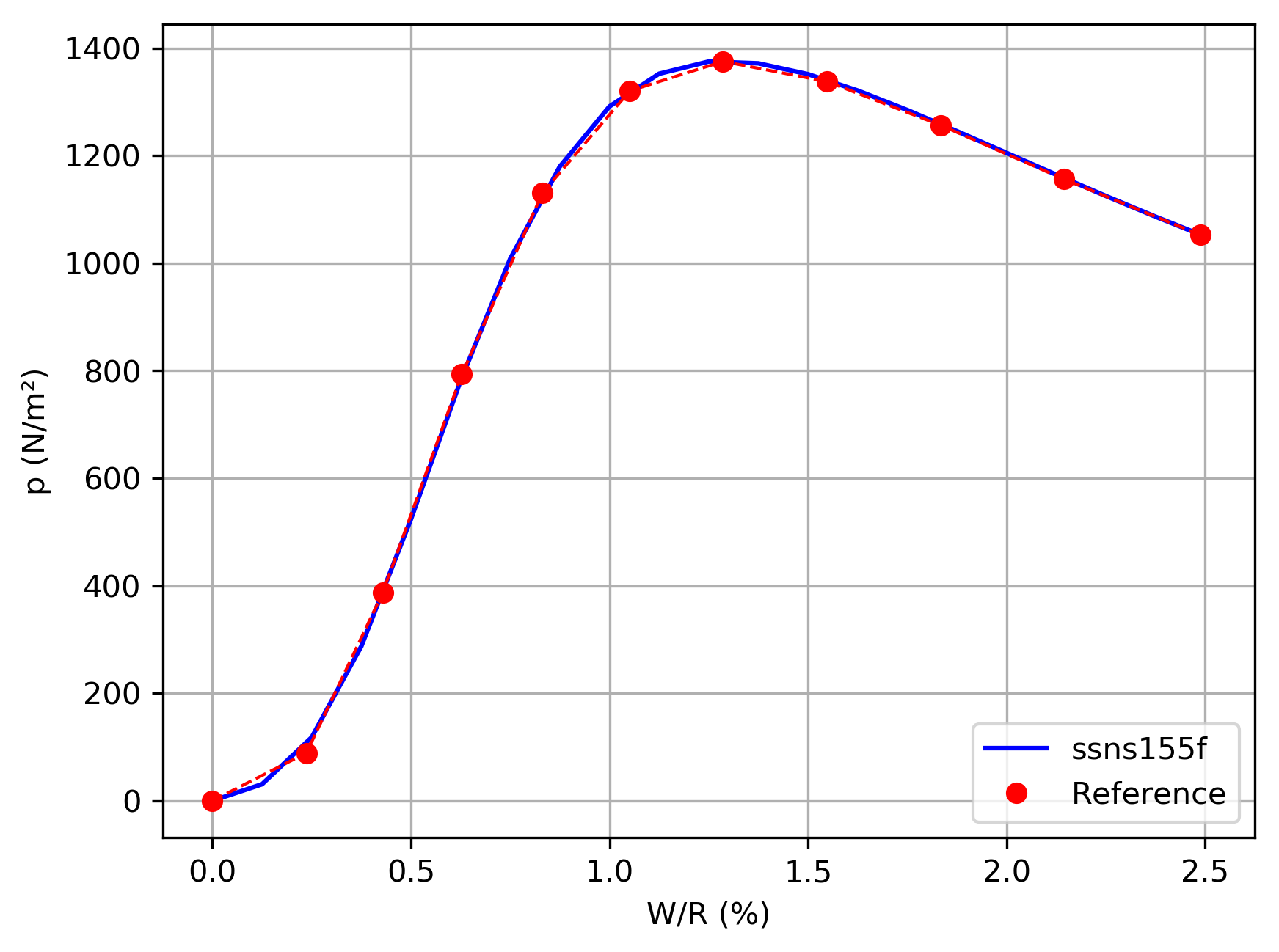
Figure 6.2-a: Résultats de la modélisation D vs référence numérique de la figure 2.1 -a.
Remarques#
On a utilisé le pilotage en déplacement (SUIV_PILO ) comme pour la modélisation D.
Avec des mailles bi-quadratiques, donc d’ordre plus élevé que la solution de référence, les résultats restent aussi satisfaisant qu’avec les mailles quadratiques de la modélisation E.
Synthèse des résultats#
Ce document valide l’élément de MEMBRANE en grandes déformations, pour:
les lois de comportement de Saint Venant Kirchhoff et néo-Hookéenne,
les éléments linéaires, quadratiques et bi-quadratiques.
Cette validation se fonde sur la comparaison avec des résultats issus de la littérature et est complétée par plusieurs tests de non-régression. Les éléments de littérature servant de référence ont aussi servi à implanter l’élément de membrane en grandes déformations dans code_aster, on vérifie donc la bonne implantation de l’élément dans le code vis à vis des sources utilisées.
Étant donné l’incertitude sur les résultats de référence, il n’est pas possible de conclure quant à la pertinence d’utiliser des éléments d’ordre plus élevés pour obtenir des résultats plus précis à maillage identique. On peut par contre conclure que tous ces éléments donnent ici des résultats satisfaisants, quelle que soit la loi de comportement utilisée.
On constate par ailleurs que l’élément de membrane en grandes déformations est fortement non linéaire et nécessite un certain nombre d’itérations de Newton (parfois plus de 100) pour atteindre l’équilibre initial.