v6.04.511 SSNV511 – Bloc découpé par deux interfaces intersectées avec X-FEM#
Résumé:
Ce test permet de valider l’approche intersection avec X-FEM. Il s’agit d’un cas test oùl’on introduit trois fissures. La première fissure coupe complètement le domaine. Les deux autres fissures sont définies par une même level-set normale. Elles sont branchées de part et d’autre de la première via le mot clé JONCTIONde l’opérateur DEFI_FISS_XFEM. La double jonction forme alors une intersection. On teste l’approche avec et sans contact.
Solution de référence#
Soit \(\Omega =[-5,+5]\times [-5,+5]\) le domaine occupé par le solide, dans le plan \((X,Y)\) . Le domaine \(\Omega ` est partitionné en :math:\)Omega ={Omega}_{1}cup {Omega}_{2}cup {Omega}_{3}cup {Omega}_{4.}` , où on a posé:
\(\begin{array}{c}{\Omega}_{1}=\left[-5,0\right[\times \left]0,+5\right],\\ {\Omega}_{2}=\left[-5,0\right[\times \left[-5,0\right[,\\ {\Omega}_{3}=\left]0,+5\right]\times \left]0,+5\right],\\ {\Omega}_{4}=\left]0,+5\right]\times \left[-5,0\right[.\end{array}\)
Cas sans contact#
Sans contact, chaque zone doit subir un mouvement de corps rigide correspondant à la condition limite imposée sur son bord (droit ou gauche).
L’énergie de la structure est donc:
\({E}^{e}=0.\)
Le champ de déplacement solution analytique est:
\(u={u}_{x}(x,y){e}_{x},\)
avec:
\({u}_{x}(x,y)=\lbrace \begin{array}{c}-\frac{1}{4}\text{pour}(x,y)\in \left[-5,0\right[\times \left]0,+5\right[,\\ -\frac{1}{2}\text{pour}(x,y)\in \left[-5,0\right[\times \left[-5,0\right[,\\ +\frac{3}{4}\text{pour}(x,y)\in \left]0,+5\right]\times \left]0,+5\right],\\ +1\text{pour}(x,y)\in \left]0,+5\right]\times \left[-5,0\right[,\end{array}\)
La norme \({L}^{2}\) du déplacement est définie par:
\({\Vert u\Vert }_{{L}^{2}}^{2}={\int}_{\Omega}{\Vert u\Vert }^{2}d\Omega .\)
On a donc:
\({\Vert u\Vert }_{{L}^{2}}^{2}=25\left(\frac{1}{16}+\frac{1}{4}+\frac{9}{16}+1\right)=25\frac{15}{8}.\)
Soit:
\({\parallel u\parallel }_{{L}^{2}}=\frac{5}{2}\sqrt{\frac{15}{2}}\approx 6,84653196881{\text{m}}^{2}.\)
Ce résultat est valable dans le cas des contraintes planes et des déformations planes. Dans le cas 3D, l’épaisseur choisie est 1 m. L’expression de la norme \({L}^{2}\) du déplacement est identique, mais les unités sont modifiées.
On a alors:
\({\parallel u\parallel }_{{L}^{2}}=\frac{5}{2}\sqrt{\frac{15}{2}}\approx 6,84653196881{\text{m}}^{\frac{5}{2}}.\)
Cas avec contact#
Soit:
\({p}_{x}(y)=\lbrace \begin{array}{c}1\text{MPa pour}y\in \left[-5,0\right[\\ 2\text{MPa pour}y\in \left]0,+5\right]\end{array}\text{et}{p}_{y}(x)=\lbrace \begin{array}{c}1\text{MPa pour}x\in \left[-5,0\right[\\ 2\text{MPa pour}x\in \left]0,+5\right]\end{array}.\)
On a donc par définition:
\(\begin{array}{c}{p}_{x}(y)=2\text{et}{p}_{y}(x)=1\text{, dans}{\Omega}_{1,}\\ {p}_{x}(y)=1\text{et}{p}_{y}(x)=1\text{, dans}{\Omega}_{2,}\\ {p}_{x}(y)=2\text{et}{p}_{y}(x)=2\text{, dans}{\Omega}_{3,}\\ {p}_{x}(y)=1\text{et}{p}_{y}(x)=2\text{, dans}{\Omega}_{4.}\end{array}\) éq 2.2-1
Cas des déformations planes#
Le tenseur des contraintes solution analytique est:
\(\sigma =-{p}_{x}(y){e}_{x}\otimes {e}_{x}-{p}_{y}(x){e}_{y}\otimes {e}_{y}-\nu ({p}_{x}(y)+{p}_{y}(x)){e}_{z}\otimes {e}_{z}\)
On a:
\(\mathit{tr}(\sigma )=-(1+\nu )({p}_{x}(y)+{p}_{y}(x)).\)
Le tenseur des déformations est obtenu en appliquant la loi de Hooke:
\(\epsilon =\frac{1+\nu }{E}\sigma -\frac{\nu}{E}\mathit{tr}(\sigma )I,\)
où \(I\) est le tenseur identité.
On a donc:
\(\begin{array}{c}\epsilon =-\left(\frac{(1+\nu )(1-\nu ){p}_{x}(y)}{E}-\frac{\nu (1+\nu ){p}_{y}(x)}{E}\right){e}_{x}\otimes {e}_{x}\\ -\left(\frac{(1+\nu )(1-\nu ){p}_{y}(x)}{E}-\frac{\nu (1+\nu ){p}_{x}(y)}{E}\right){e}_{y}\otimes {e}_{y}\end{array}\)
On a donc:
\(\sigma :\epsilon =\frac{(1+\nu )(1-\nu )}{E}{\left({p}_{x}(y)\right)}^{2}-2\frac{\nu (1+\nu )}{E}{p}_{x}(y){p}_{y}(x)+\frac{(1+\nu )(1-\nu )}{E}{\left({p}_{y}(x)\right)}^{2}.\)
D’où:
:math:`{E}^{e}=frac{1}{2}frac{1+nu }{E}{int}_{Omega}left[(1-nu ){left({p}_{x}(y)right)}^{2}-2nu {p}_{x}(y){p}_{y}(x)+(1-nu ){left({p}_{y}(x)right)}^{2}right]dOmega `
On a donc d’après l’équation 2.2-1:
\(\begin{array}{c}{E}^{e}=\frac{1}{2}\frac{1+\nu }{E}[{\int}_{{\Omega}_{1}}\left[4(1-\nu )-4\nu +(1-\nu )\right]d\Omega +{\int}_{{\Omega}_{2}}\left[(1-\nu )-2\nu +(1-\nu )\right]d\Omega \\ +{\int}_{{\Omega}_{3}}\left[4(1-\nu )-8\nu +4(1-\nu )\right]d\Omega +{\int}_{{\Omega}_{4}}\left[(1-\nu )-4\nu +4(1-\nu )\right]d\Omega ].\end{array}\)
Soit:
\({E}^{e}=\frac{1}{2}\frac{1+\nu }{E}\left[\left(5-9\nu \right)\left|{\Omega}_{1}\right|+\left(2-4\nu \right)\left|{\Omega}_{2}\right|+\left(8-16\nu \right)\left|{\Omega}_{3}\right|+\left(5-9\nu \right)\left|{\Omega}_{4}\right|\right].\)
On a:
\(\left|{\Omega}_{1}\right|=\left|{\Omega}_{2}\right|=\left|{\Omega}_{3}\right|=\left|{\Omega}_{4}\right|=5\times 5=25.\)
On a donc:
\({E}^{e}=\frac{1}{2}\frac{1+\nu }{E}25\left[(5-9\nu )+(2-4\nu )+(8-16\nu )+(5-9\nu ).\right]\)
Et finalement:
\({E}^{e}=\frac{25(1+\nu )(10-19\nu )}{E}=1,3975\text{MJ}\times {\text{m}}^{-1}.\)
Le champ de déplacement analytique \(u={u}_{x}{e}_{x}+{u}_{y}{e}_{y}\) s’obtient en intégrant les déformations:
\(\begin{array}{c}{u}_{x}={\int}_{-5}^{x}{\epsilon}_{xx}\mathit{dx},\\ {u}_{y}={\int}_{-5}^{y}{\epsilon}_{yy}\mathit{dy},\end{array}\)
car les conditions limites appliquées sont \({u}_{x}(x=-5)=0\) et \({u}_{y}(y=-5)=0\) .
Il est à noter que le tenseur des déformations est discontinu. On a en effet:
\(\epsilon =\lbrace \begin{array}{c}-\frac{(1+\nu )(2-3\nu )}{E}{e}_{x}\otimes {e}_{x}-\frac{(1+\nu )(1-3\nu )}{E}{e}_{y}\otimes {e}_{y},\text{dans}\left[-5,0\right[\times \left]0,+5\right]\\ -\frac{(1+\nu )(1-2\nu )}{E}{e}_{x}\otimes {e}_{x}-\frac{(1+\nu )(1-2\nu )}{E}{e}_{y}\otimes {e}_{y},\text{dans}\left[-5,0\right[\times \left[-5,0\right[\\ -\frac{2(1+\nu )(1-2\nu )}{E}{e}_{x}\otimes {e}_{x}-\frac{2(1+\nu )(1-2\nu )}{E}{e}_{y}\otimes {e}_{y},\text{dans}\left]0,+5\right]\times \left]0,+5\right]\\ -\frac{(1+\nu )(1-3\nu )}{E}{e}_{x}\otimes {e}_{x}-\frac{(1+\nu )(2-3\nu )}{E}{e}_{y}\otimes {e}_{y},\text{dans}\left]0,+5\right]\times \left[-5,0\right[\end{array}\)
On remarque que le champ de déformations est discontinu au travers des droites d’équation \(x=0\) et \(y=0\) . Il est donc nécessaire de distinguer les cas selon le signe de la coordonnée sur laquelle on intègre pour expliciter la valeur des intégrales.
On a ainsi:
\({u}_{x}=\lbrace \begin{array}{c}{\int}_{-5}^{x}\left[-\frac{(1+\nu )(2-3\nu )}{E}\right]\mathit{dx},\text{dans}\left[-5,0\right[\times \left]0,+5\right]\\ {\int}_{-5}^{x}\left[-\frac{(1+\nu )(1-2\nu )}{E}\right]\mathit{dx},\text{dans}\left[-5,0\right[\times \left[-5,0\right[\\ {\int}_{-5}^{0}\left[-\frac{(1+\nu )(2-3\nu )}{E}\right]\mathit{dx}+{\int}_{0}^{x}\left[-\frac{2(1+\nu )(1-2\nu )}{E}\right]\mathit{dx},\text{dans}\left]0,+5\right]\times \left]0,+5\right]\\ {\int}_{-5}^{0}\left[-\frac{(1+\nu )(1-2\nu )}{E}\right]\mathit{dx}+{\int}_{0}^{x}\left[-\frac{(1+\nu )(1-3\nu )}{E}\right]\mathit{dx},\text{dans}\left]0,+5\right]\times \left[-5,0\right[\end{array},\)
et
\({u}_{y}=\lbrace \begin{array}{c}{\int}_{-5}^{0}\left[-\frac{(1+\nu )(1-2\nu )}{E}\right]\mathit{dy}+{\int}_{0}^{y}\left[-\frac{(1+\nu )(1-3\nu )}{E}\right]\mathit{dy},\text{dans}\left[-5,0\right[\times \left]0,+5\right]\\ {\int}_{-5}^{y}\left[-\frac{(1+\nu )(1-2\nu )}{E}\right]\mathit{dy},\text{dans}\left[-5,0\right[\times \left[-5,0\right[\\ {\int}_{-5}^{0}\left[-\frac{(1+\nu )(2-3\nu )}{E}\right]\mathit{dy}+{\int}_{0}^{y}\left[-\frac{2(1+\nu )(1-2\nu )}{E}\right]\mathit{dy},\text{dans}\left]0,+5\right]\times \left]0,+5\right]\\ {\int}_{-5}^{y}\left[-\frac{(1+\nu )(2-3\nu )}{E}\right]\mathit{dy},\text{dans}\left]0,+5\right]\times \left[-5,0\right[\end{array}.\)
Soit:
\({u}_{x}=\lbrace \begin{array}{c}-\frac{(1+\nu )(2-3\nu )}{E}x-5\frac{(1+\nu )(2-3\nu )}{E},\text{dans}\left[-5,0\right[\times \left]0,+5\right]\\ -\frac{(1+\nu )(1-2\nu )}{E}x-5\frac{(1+\nu )(1-2\nu )}{E},\text{dans}\left[-5,0\right[\times \left[-5,0\right[\\ -\frac{2(1+\nu )(1-2\nu )}{E}x-5\frac{(1+\nu )(2-3\nu )}{E},\text{dans}\left]0,+5\right]\times \left]0,+5\right]\\ -\frac{(1+\nu )(1-3\nu )}{E}x-5\frac{(1+\nu )(1-2\nu )}{E},\text{dans}\left]0,+5\right]\times \left[-5,0\right[\end{array},\) éq 2.2-2
et:
\({u}_{y}=\lbrace \begin{array}{c}-\frac{(1+\nu )(1-3\nu )}{E}y-5\frac{(1+\nu )(1-2\nu )}{E},\text{dans}\left[-5,0\right[\times \left]0,+5\right]\\ -\frac{(1+\nu )(1-2\nu )}{E}y-5\frac{(1+\nu )(1-2\nu )}{E},\text{dans}\left[-5,0\right[\times \left[-5,0\right[\\ -\frac{2(1+\nu )(1-2\nu )}{E}y-5\frac{(1+\nu )(2-3\nu )}{E},\text{dans}\left]0,+5\right]\times \left]0,+5\right]\\ -\frac{(1+\nu )(2-3\nu )}{E}y-5\frac{(1+\nu )(2-3\nu )}{E},\text{dans}\left]0,+5\right]\times \left[-5,0\right[\end{array}.\) éq 2.2-3
Il est à noter que le champ de déplacement n’est pas continu. Le champ étant solution d’un problème de contact, la partie normale aux interfaces du déplacement est continue et on a:
\({u}_{x}(x={0}^{-})={u}_{x}(x={0}^{+})=\lbrace \begin{array}{c}-5\frac{(1+\nu )(1-2\nu )}{E}\text{, pour}y\in \left[-5,0\right[\\ -5\frac{(1+\nu )(2-3\nu )}{E}\text{, pour}y\in \left]0,+5\right]\end{array},\)
et
\({u}_{y}(y={0}^{-})={u}_{y}(y={0}^{+})=\lbrace \begin{array}{c}-5\frac{(1+\nu )(1-2\nu )}{E}\text{, pour}x\in \left[-5,0\right[\\ -5\frac{(1+\nu )(2-3\nu )}{E}\text{, pour}x\in \left]0,+5\right]\end{array}.\)
En revanche, la partie tangentielle du déplacement est discontinue et on a:
\({u}_{y}(x={0}^{+})-{u}_{y}(x={0}^{-})=-\frac{(y+5)(1+\nu )(1-\nu )}{E},\)
et
\({u}_{x}(y={0}^{+})-{u}_{x}(y={0}^{-})=-\frac{(x+5)(1+\nu )(1-\nu )}{E}.\)
Le calcul de l’intégrale du carré de la norme du déplacement doit donc encore une fois utiliser une partition du domaine conforme aux interfaces d’équation \(x=0\) et \(y=0\) .
On a donc:
\({\int}_{\Omega}{\Vert u\Vert }^{2}d\Omega ={\int}_{{\Omega}_{1}}\left({u}_{x}^{2}+{u}_{y}^{2}\right)d\Omega +{\int}_{{\Omega}_{2}}\left({u}_{x}^{2}+{u}_{y}^{2}\right)d\Omega +{\int}_{{\Omega}_{3}}\left({u}_{x}^{2}+{u}_{y}^{2}\right)d\Omega +{\int}_{{\Omega}_{4}}\left({u}_{x}^{2}+{u}_{y}^{2}\right)d\Omega .\)
On a finalement:
\({\int}_{\Omega}{\Vert u\Vert }^{2}d\Omega =\frac{1250\left(131{\nu}^{4}+119{\nu}^{3}-115{\nu}^{2}-3685\nu +40\right)}{3{E}^{2}}.\)
D’où:
\({\Vert u\Vert }_{{L}^{2}}=\frac{25}{E}\sqrt{\frac{2\left(131{\nu}^{4}+119{\nu}^{3}-115{\nu}^{2}-63\nu +40\right)}{3}}\approx 0,791204250915{\text{m}}^{2}.\)
Cas des contraintes planes#
Le tenseur des contraintes solution analytique est:
\(\sigma =-{p}_{x}(y){e}_{x}\otimes {e}_{x}-{p}_{y}(x){e}_{y}\otimes {e}_{y}\) éq 2.2-4
On a:
\(\mathit{tr}(\sigma )=-({p}_{x}(y)+{p}_{y}(x)).\)
Le tenseur des déformations est obtenu en appliquant la loi de Hooke et on a:
\(\begin{array}{c}\epsilon =\left[-\frac{1+\nu }{E}{p}_{x}(y)+\frac{\nu}{E}({p}_{x}(y)+{p}_{y}(x))\right]{e}_{x}\otimes {e}_{x}+\left[-\frac{1+\nu }{E}{p}_{y}(x)+\frac{\nu}{E}({p}_{x}(y)+{p}_{y}(x))\right]{e}_{y}\otimes {e}_{y}\\ +\frac{\nu}{E}({p}_{x}(y)+{p}_{y}(x)){e}_{z}\otimes {e}_{z}\end{array}\)
Et finalement:
\(\epsilon =-\left(\frac{{p}_{x}(y)}{E}-\nu \frac{{p}_{y}(x)}{E}\right){e}_{x}\otimes {e}_{x}-\left(\frac{{p}_{y}(x)}{E}-\nu \frac{{p}_{x}(y)}{E}\right){e}_{y}\otimes {e}_{y}+\frac{\nu}{E}\left({p}_{x}(y)+{p}_{y}(x)\right){e}_{z}\otimes {e}_{z}\)
L’énergie de la structure est:
:math:`{E}^{e}=frac{1}{2}{int}_{Omega}sigma :epsilon dOmega `
On a:
\(\sigma :\epsilon ={p}_{x}(y)\left(\frac{{p}_{x}(y)}{E}-\nu \frac{{p}_{y}(x)}{E}\right)+{p}_{y}(x)\left(\frac{{p}_{y}(x)}{E}-\nu \frac{{p}_{x}(y)}{E}\right)\)
Soit:
\(\sigma :\epsilon =\frac{{({p}_{x}(y))}^{2}}{E}-2\nu \frac{{p}_{x}(y){p}_{y}(x)}{E}+\frac{{({p}_{y}(x))}^{2}}{E}\)
On a donc:
:math:`{E}^{e}=frac{1}{2}frac{1}{E}{int}_{Omega}left[{({p}_{x}(y))}^{2}-2nu {p}_{x}(y){p}_{y}(x)+{({p}_{y}(x))}^{2}right]dOmega `
D’où d’après l’équation 2.2-1:
\({E}^{e}=\frac{1}{2}\frac{1}{E}\left[{\int}_{{\Omega}_{1}}\left(4-4\nu +1\right)d\Omega +{\int}_{{\Omega}_{2}}\left(1-2\nu +1\right)d\Omega +{\int}_{{\Omega}_{3}}\left(4-8\nu +4\right)d\Omega +{\int}_{{\Omega}_{4}}\left(1-4\nu +4\right)d\Omega \right].\)
Soit:
\({E}^{e}=\frac{1}{2}\frac{1}{E}\left[(5-4\nu )\left|{\Omega}_{1}\right|+(2-2\nu )\left|{\Omega}_{2}\right|+(8-8\nu )\left|{\Omega}_{3}\right|+(5-4\nu )\left|{\Omega}_{4}\right|\right].\)
On a donc:
\({E}^{e}=\frac{1}{2}\frac{1}{E}25\left[(5-4\nu )+(2-2\nu )+(8-8\nu )+(5-4\nu ).\right]\)
Et finalement:
\({E}^{e}=\frac{1}{E}25(10-9\nu )=1,825\text{MJ}\times {\text{m}}^{-1}.\) éq 2.2-5
Le champ de déplacement analytique \(u={u}_{x}{e}_{x}+{u}_{y}{e}_{y}\) s’obtient en intégrant les déformations:
\(\begin{array}{c}{u}_{x}={\int}_{-5}^{x}{\epsilon}_{xx}\mathit{dx},\\ {u}_{y}={\int}_{-5}^{y}{\epsilon}_{yy}\mathit{dy},\end{array}\)
car les conditions limites appliquées sont \({u}_{x}(x=-5)=0\) et \({u}_{y}(y=-5)=0\) .
Il est à noter que le tenseur des déformations est discontinu. On a en effet:
\(\epsilon =\lbrace \begin{array}{c}-\frac{2-\nu }{E}{e}_{x}\otimes {e}_{x}-\frac{1-2\nu }{E}{e}_{y}\otimes {e}_{y}+3\frac{\nu}{E}{e}_{z}\otimes {e}_{z},\text{dans}\left[-5,0\right[\times \left]0,+5\right]\\ -\frac{1-\nu }{E}{e}_{x}\otimes {e}_{x}-\frac{1-\nu }{E}{e}_{y}\otimes {e}_{y}+2\frac{\nu}{E}{e}_{z}\otimes {e}_{z},\text{dans}\left[-5,0\right[\times \left[-5,0\right[\\ -\frac{2-2\nu }{E}{e}_{x}\otimes {e}_{x}-\frac{2-2\nu }{E}{e}_{y}\otimes {e}_{y}+4\frac{\nu}{E}{e}_{z}\otimes {e}_{z},\text{dans}\left]0,+5\right]\times \left]0,+5\right]\\ -\frac{1-2\nu }{E}{e}_{x}\otimes {e}_{x}-\frac{2-\nu }{E}{e}_{y}\otimes {e}_{y}+3\frac{\nu}{E}{e}_{z}\otimes {e}_{z},\text{dans}\left]0,+5\right]\times \left[-5,0\right[\end{array}.\) éq 2.2-6
On remarque que le champ de déformations est discontinu au travers des droites d’équation \(x=0\) et \(y=0\) . Il est donc nécessaire de distinguer les cas selon le signe de la coordonnée sur laquelle on intègre pour expliciter la valeur des intégrales. On a ainsi:
\({u}_{x}=\lbrace \begin{array}{c}{\int}_{-5}^{x}\left(-\frac{2-\nu }{E}\right)\mathit{dx},\text{dans}\left[-5,0\right[\times \left]0,+5\right]\\ {\int}_{-5}^{x}\left(-\frac{1-\nu }{E}\right)\mathit{dx},\text{dans}\left[-5,0\right[\times \left[-5,0\right[\\ {\int}_{-5}^{0}\left(-\frac{2-\nu }{E}\right)\mathit{dx}+{\int}_{0}^{x}\left(-\frac{2-2\nu }{E}\right)\mathit{dx},\text{dans}\left]0,+5\right]\times \left]0,+5\right]\\ {\int}_{-5}^{0}\left(-\frac{1-\nu }{E}\right)\mathit{dx}+{\int}_{0}^{x}\left(-\frac{1-2\nu }{E}\right)\mathit{dx},\text{dans}\left]0,+5\right]\times \left[-5,0\right[\end{array},\)
et
\({u}_{y}=\lbrace \begin{array}{c}{\int}_{-5}^{0}\left(-\frac{1-\nu }{E}\right)\mathit{dy}+{\int}_{0}^{y}\left(-\frac{1-2\nu }{E}\right)\mathit{dy},\text{dans}\left[-5,0\right[\times \left]0,+5\right]\\ {\int}_{-5}^{y}\left(-\frac{1-\nu }{E}\right)\mathit{dy},\text{dans}\left[-5,0\right[\times \left[-5,0\right[\\ {\int}_{-5}^{0}\left(-\frac{2-\nu }{E}\right)\mathit{dy}+{\int}_{0}^{y}\left(-\frac{2-2\nu }{E}\right)\mathit{dy},\text{dans}\left]0,+5\right]\times \left]0,+5\right]\\ {\int}_{-5}^{y}\left(-\frac{2-\nu }{E}\right)\mathit{dy},\text{dans}\left]0,+5\right]\times \left[-5,0\right[\end{array}.\)
Soit:
\({u}_{x}=\lbrace \begin{array}{c}-\frac{2-\nu }{E}x-5\frac{2-\nu }{E},\text{dans}\left[-5,0\right[\times \left]0,+5\right]\\ -\frac{1-\nu }{E}x-5\frac{1-\nu }{E},\text{dans}\left[-5,0\right[\times \left[-5,0\right[\\ -\frac{2-2\nu }{E}x-5\frac{2-\nu }{E},\text{dans}\left]0,+5\right]\times \left]0,+5\right]\\ -\frac{1-2\nu }{E}x-5\frac{1-\nu }{E},\text{dans}\left]0,+5\right]\times \left[-5,0\right[\end{array},\) éq 2.2-7
et:
\({u}_{y}=\lbrace \begin{array}{c}-\frac{1-2\nu }{E}y-5\frac{1-\nu }{E},\text{dans}\left[-5,0\right[\times \left]0,+5\right]\\ -\frac{1-\nu }{E}y-5\frac{1-\nu }{E},\text{dans}\left[-5,0\right[\times \left[-5,0\right[\\ -\frac{2-2\nu }{E}y-5\frac{2-\nu }{E},\text{dans}\left]0,+5\right]\times \left]0,+5\right]\\ -\frac{2-\nu }{E}y-5\frac{2-\nu }{E},\text{dans}\left]0,+5\right]\times \left[-5,0\right[\end{array}.\) éq 2.2-8
Il est à noter que le champ de déplacement n’est pas continu. Le champ étant solution d’un problème de contact, la partie normale aux interfaces du déplacement est continue et on a:
\({u}_{x}(x={0}^{-})={u}_{x}(x={0}^{+})=\lbrace \begin{array}{c}-5\frac{1-\nu }{E}\text{, pour}y\in \left[-5,0\right[\\ -5\frac{2-\nu }{E}\text{, pour}y\in \left]0,+5\right]\end{array},\)
et
\({u}_{y}(y={0}^{-})={u}_{y}(y={0}^{+})=\lbrace \begin{array}{c}-5\frac{2-\nu }{E}\text{, pour}x\in \left[-5,0\right[\\ -5\frac{1-\nu }{E}\text{, pour}x\in \left]0,+5\right]\end{array}.\)
En revanche, la partie tangentielle du déplacement est discontinue et on a:
\({u}_{y}(x={0}^{+})-{u}_{y}(x={0}^{-})=-\frac{y+5}{E},\)
et
\({u}_{x}(y={0}^{+})-{u}_{x}(y={0}^{-})=-\frac{x+5}{E}.\)
Le calcul de l’intégrale du carré de la norme du déplacement doit donc encore une fois utiliser une partition du domaine conforme aux interfaces d’équation \(x=0\) et \(y=0\) .
On a donc:
\({\int}_{\Omega}{\Vert u\Vert }^{2}d\Omega ={\int}_{{\Omega}_{1}}\left({u}_{x}^{2}+{u}_{y}^{2}\right)d\Omega +{\int}_{{\Omega}_{2}}\left({u}_{x}^{2}+{u}_{y}^{2}\right)d\Omega +{\int}_{{\Omega}_{3}}\left({u}_{x}^{2}+{u}_{y}^{2}\right)d\Omega +{\int}_{{\Omega}_{4}}\left({u}_{x}^{2}+{u}_{y}^{2}\right)d\Omega .\)
On a finalement:
\({\int}_{\Omega}{\Vert u\Vert }^{2}d\Omega =\frac{1250\left(28{\nu}^{2}-63\nu +40\right)}{3{E}^{2}}.\)
D’où:
\({\Vert u\Vert }_{{L}^{2}}=\frac{25}{E}\sqrt{\frac{2\left(28{\nu}^{2}-63\nu +40\right)}{3}}\approx 0,992051745962{\text{m}}^{2}.\)
Cas 3D#
La structure occupe le domaine \({\Omega}_{3D}=\Omega \times [0,1]\) . Les conditions aux limites du cas 3D sont les mêmes que celles des cas 2D dans le plan \((X,Y),\) une condition de rouleau est imposée en \(Z=0\) et le bord \(Z=1\) est libre de contraintes. Le tenseur des contraintes solution analytique est donc identique au cas des contraintes planes ( cf. éq 2.2-4):
\(\sigma =-{p}_{x}(y){e}_{x}\otimes {e}_{x}-{p}_{y}(x){e}_{y}\otimes {e}_{y}\)
La densité d’énergie élastique est donc identique à celle du cas 3D. Le solide est d’épaisseur unitaire dans la direction \(Z\) . L’expression de l’énergie de la structure est donc identique au cas des contraintes planes, mais les unités sont modifiées. On a alors ( cf. éq 2.2-5):
\({E}^{e}=\frac{1}{E}25(10-9\nu )=1,825\text{MJ}.\)
Le champ de déplacement analytique \(u={u}_{x}{e}_{x}+{u}_{y}{e}_{y}+{u}_{z}{e}_{z}\) s’obtient en intégrant les déformations:
\(\begin{array}{c}{u}_{x}={\int}_{-5}^{x}{\epsilon}_{xx}\mathit{dx},\\ {u}_{y}={\int}_{-5}^{y}{\epsilon}_{yy}\mathit{dy},\\ {u}_{z}={\int}_{0}^{z}{\epsilon}_{zz}\mathit{dz},\end{array}\)
car les conditions limites appliquées sont \({u}_{x}(x=-5)=0\) , \({u}_{y}(y=-5)=0\) et \({u}_{z}(z=0)=0\) .
Il est à noter que le tenseur des déformations est discontinu. On a en effet ( cf. éq 2.2-6):
\(\epsilon =\lbrace \begin{array}{c}-\frac{2-\nu }{E}{e}_{x}\otimes {e}_{x}-\frac{1-2\nu }{E}{e}_{y}\otimes {e}_{y}+3\frac{\nu}{E}{e}_{z}\otimes {e}_{z},\text{dans}\left[-5,0\right[\times \left]0,+5\right]\times [0,1]\\ -\frac{1-\nu }{E}{e}_{x}\otimes {e}_{x}-\frac{1-\nu }{E}{e}_{y}\otimes {e}_{y}+2\frac{\nu}{E}{e}_{z}\otimes {e}_{z},\text{dans}\left[-5,0\right[\times \left[-5,0\right[\times [0,1]\\ -\frac{2-2\nu }{E}{e}_{x}\otimes {e}_{x}-\frac{2-2\nu }{E}{e}_{y}\otimes {e}_{y}+4\frac{\nu}{E}{e}_{z}\otimes {e}_{z},\text{dans}\left]0,+5\right]\times \left]0,+5\right]\times [0,1]\\ -\frac{1-2\nu }{E}{e}_{x}\otimes {e}_{x}-\frac{2-\nu }{E}{e}_{y}\otimes {e}_{y}+3\frac{\nu}{E}{e}_{z}\otimes {e}_{z},\text{dans}\left]0,+5\right]\times \left[-5,0\right[\times [0,1]\end{array}.\)
On remarque que le champ de déformations est discontinu au travers des droites d’équation \(x=0\) et \(y=0\) . Il est donc nécessaire de distinguer les cas selon le signe de la coordonnée sur laquelle on intègre pour expliciter la valeur des intégrales. Les expressions des composantes \({u}_{x}\) et \({u}_{y}\) sont identiques au cas des contraintes planes ( cf. éq 2.2-7et 2.2-8) et on a pour \({u}_{z}\) :
\({u}_{z}=\lbrace \begin{array}{c}{\int}_{0}^{1}\frac{3\nu }{E}\mathit{dz},\text{dans}\left[-5,0\right[\times \left]0,+5\right]\times [0,1]\\ {\int}_{0}^{1}\frac{2\nu }{E}\mathit{dz},\text{dans}\left[-5,0\right[\times \left[-5,0\right[\times [0,1]\\ {\int}_{0}^{1}\frac{4\nu }{E}\mathit{dz},\text{dans}\left]0,+5\right]\times \left]0,+5\right]\times [0,1]\\ {\int}_{0}^{1}\frac{3\nu }{E}\mathit{dz},\text{dans}\left]0,+5\right]\times \left[-5,0\right[\times [0,1]\end{array}.\)
Soit:
\({u}_{z}=\lbrace \begin{array}{c}\frac{3\nu }{E}z,\text{dans}\left[-5,0\right[\times \left]0,+5\right]\times [0,1]\\ \frac{2\nu }{E}z,\text{dans}\left[-5,0\right[\times \left[-5,0\right[\times [0,1]\\ \frac{4\nu }{E}z,\text{dans}\left]0,+5\right]\times \left]0,+5\right]\times [0,1]\\ \frac{3\nu }{E}z,\text{dans}\left]0,+5\right]\times \left[-5,0\right[\times [0,1]\end{array}.\) éq 2.2-9
Le calcul de l’intégrale du carré de la norme du déplacement doit donc encore une fois utiliser une partition du domaine conforme aux interfaces d’équation \(x=0\) et \(y=0\) . On a donc:
\(\begin{array}{c}{\int}_{{\Omega}_{3D}}{\Vert u\Vert }^{2}d\Omega ={\int}_{{\Omega}_{1}\times [0,1]}\left({u}_{x}^{2}+{u}_{y}^{2}+{u}_{z}^{2}\right)d\Omega +{\int}_{{\Omega}_{2}\times [0,1]}\left({u}_{x}^{2}+{u}_{y}^{2}+{u}_{z}^{2}\right)d\Omega \\ +{\int}_{{\Omega}_{3}\times [0,1]}\left({u}_{x}^{2}+{u}_{y}^{2}+{u}_{z}^{2}\right)d\Omega +{\int}_{{\Omega}_{4}\times [0,1]}\left({u}_{x}^{2}+{u}_{y}^{2}+{u}_{z}^{2}\right)d\Omega .\end{array}\)
On a finalement:
\({\int}_{{\Omega}_{3D}}{\Vert u\Vert }^{2}d\Omega =\frac{50(719{\nu}^{2}-1575\nu +1000)}{3{E}^{2}}.\)
D’où:
\({\Vert u\Vert }_{{L}^{2}}=\frac{5}{E}\sqrt{\frac{2(719{\nu}^{2}-1575\nu +1000)}{3}}\approx 0,99348712456{\text{m}}^{\frac{5}{2}}.\)
Modélisation A#
Caractéristiques de la modélisation#
Il s’agit d’une modélisation X-FEM, en déformations planes. Les interfaces sont définies par des fonctions de niveaux (level sets normales notées \(\text{LN}\) ).
Les équations des fonctions de niveaux pour les interfaces horizontale et verticale sont les suivantes :
\(\text{LN}1=Y\) éq 3.1-1
\(\text{LN}2=X\) éq 3.1-2
L’interface horizontale est définie de manière classique en utilisant l’opérateur DEFI_FISS_XFEM avec la level set normale \(\text{LN1}\) .
Pour définir l’interface verticale, on procède en deux étapes. On appelle une première fois l’opérateur DEFI_FISS_XFEM avec la level set normale \(\text{LN2}\) , en définissant un point «au dessus» de la fissure horizontale pour le mot clé JONCTION (le point n’est pas obligatoirement sur la level set). Cette étape permet de définir la partie supérieure de l’interface verticale (voir figure 3.1-a au centre). On appelle une deuxième fois l’opérateur DEFI_FISS_XFEM de la même manière, mais en définissant un point «en dessous» de la fissure (voir figure 3.1-a à droite).
On a donc appelé au total 3 fois DEFI_FISS_XFEM (création de 3 objets fissures) pour définir les deux interfaces qui s’intersectent. D’un point de vue théorique, chaque objet fissure ajoute un enrichissement de type Heaviside. Ce qui fait un total de trois degrés de liberté Heaviside en plus des degrés de liberté classiques. On a donc bien 4 degré de liberté au niveau de l’intersection, ce qui permet de déplacer de manière indépendantes les 4 zones générées par les 2 interfaces.
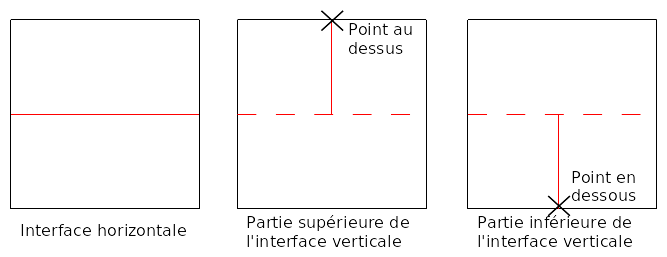
Figure 3.1-a : Étapes de construction de l’intersection.
Caractéristiques du maillage#
Le maillage qui comporte 25 mailles de type QUAD4, est représenté sur la figure 3.2-a.
On remarque sur cette figure que la maille centrale est coupée par les deux interfaces. Ce test permet donc de valider le découpage multiple. Notons que les nœuds de cette maille sont enrichis 3 fois, ils possèdent donc les degrés de liberté \(\mathit{DX}\) , \(\mathit{DY}\) , \(\mathit{H1X}\) , \(\mathit{H1Y}\) , \(\mathit{H2X}\) , \(\mathit{H2Y}\) , \(\mathit{H3X}\) et \(\mathit{H3Y}\) .
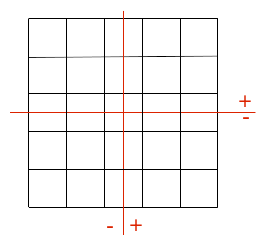
Figure 3.2-a: Le maillage de la modélisation A.
Grandeurs testées et résultats#
On teste les déplacements au niveau des lèvres des fissures après avoir effectué les opérations de post-traitements relatives à \(\text{X-FEM}\) (POST_MAIL_XFEM et POST_CHAM_XFEM). Le déplacement \(\mathit{DX}\) doit correspondre au chargement imposé de la figure 1.3-a sur chacune des zones et \(\mathit{DY}\) doit être nul. On teste le min et le max sur les lèvres de chacune des zones.
Identification |
Référence |
Type de référence |
Précision |
10^-12% |
|
DEPZON_1 |
DX |
MIN |
-0.25 |
“ANALYTIQUE” |
|
MAX |
-0.25 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
DEPZON_2 |
DX |
MIN |
-0.5 |
“ANALYTIQUE” |
10^-12% |
MAX |
-0.5 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
DEPZON_3 |
DX |
MIN |
0.75 |
“ANALYTIQUE” |
10^-12% |
MAX |
0.75 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
DEPZON_4 |
DX |
MIN |
0.75 |
“ANALYTIQUE” |
10^-12% |
MAX |
0.75 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
Tableau 3.3-1
La déformée est représentée sur la figure 3.4-a. Le code couleur représente le champ de déplacement.
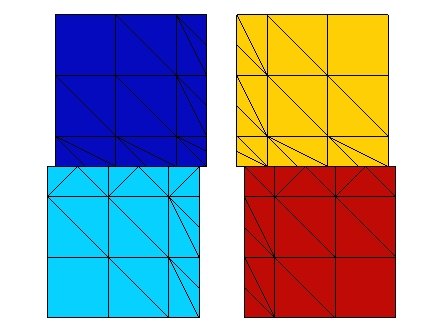
Figure 3.4-a : Déformée de la structure.
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Ee |
“ANALYTIQUE” |
0 |
On teste la valeur de \({\parallel u\parallel }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
6,84653196881 |
0.1% |
Modélisation B#
Caractéristiques de la modélisation#
Il s’agit de la même modélisation que la modélisation A, mais en contraintes planes. L’intersection est construite de la même manière.
Caractéristiques du maillage#
Le maillage qui comporte 54 mailles de type TRIA3 est représenté sur la figure 4.2-a.
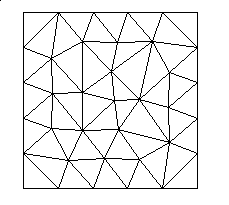
Figure 4.2-a: Le maillage de la modélisation B.
Grandeurs testées et résultats#
Les grandeurs testées sont identiques à celles présentées pour la modélisation A.
Identification |
Référence |
Type de référence |
Précision |
10^-12% |
|
DEPZON_1 |
DX |
MIN |
-0.25 |
“ANALYTIQUE” |
|
MAX |
-0.25 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
DEPZON_2 |
DX |
MIN |
-0.5 |
“ANALYTIQUE” |
10^-12% |
MAX |
-0.5 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
DEPZON_3 |
DX |
MIN |
0.75 |
“ANALYTIQUE” |
10^-12% |
MAX |
0.75 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
DEPZON_4 |
DX |
MIN |
0.75 |
“ANALYTIQUE” |
10^-12% |
MAX |
0.75 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
Tableau 4.3-1
La déformée est représentée sur la figure 4.4-a.
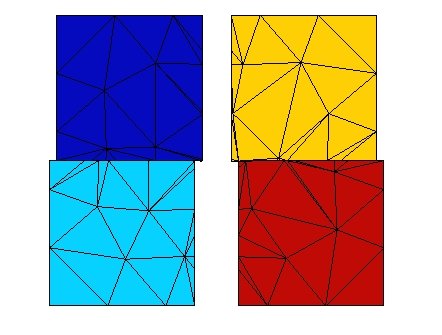
Figure 4.4-a : Déformée de la structure.
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Ee |
“ANALYTIQUE” |
0 |
On teste la valeur de \({\parallel u\parallel }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
6,84653196881 |
0.1% |
Modélisation C#
Caractéristiques de la modélisation#
Il s’agit de la même modélisation que la modélisation A, mais en \(\mathrm{3D}\) . L’intersection est construite de la même manière.
Caractéristiques du maillage#
Le maillage qui comporte 25 mailles de type HEXA8 est représenté sur la figure 5.2-a.
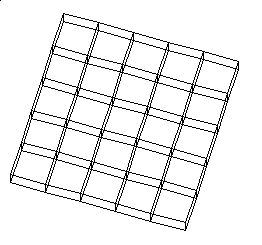
Figure 5.2-a: Le maillage de la modélisation C.
Grandeurs testées et résultats#
Les grandeurs testées sont identiques à celles présentées pour la modélisation A. On ajoute des tests sur DZ.
Identification |
Référence |
Type de référence |
Précision |
10^-12% |
|
DEPZON_1 |
DX |
MIN |
-0.25 |
“ANALYTIQUE” |
|
MAX |
-0.25 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
DEPZON_2 |
DX |
MIN |
-0.5 |
“ANALYTIQUE” |
10^-12% |
MAX |
-0.5 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
DEPZON_3 |
DX |
MIN |
0.75 |
“ANALYTIQUE” |
10^-12% |
MAX |
0.75 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
DEPZON_4 |
DX |
MIN |
0.75 |
“ANALYTIQUE” |
10^-12% |
MAX |
0.75 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
Tableau 5.3-1
La déformée est représentée sur la figure 5.4-a.
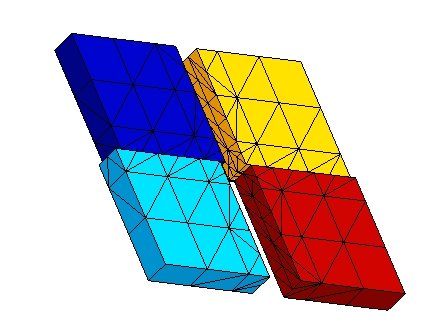
Figure 5.4-a : Déformée de la structure.
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Ee |
“ANALYTIQUE” |
0 |
On teste la valeur de \({\Vert u\Vert }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
6,84653196881 |
0.1% |
Modélisation D#
Caractéristiques de la modélisation#
Il s’agit de la même modélisation que la modélisation C.
Caractéristiques du maillage#
Le maillage qui comporte 162 mailles de type TETRA4 est représenté sur la figure 6.2-a.
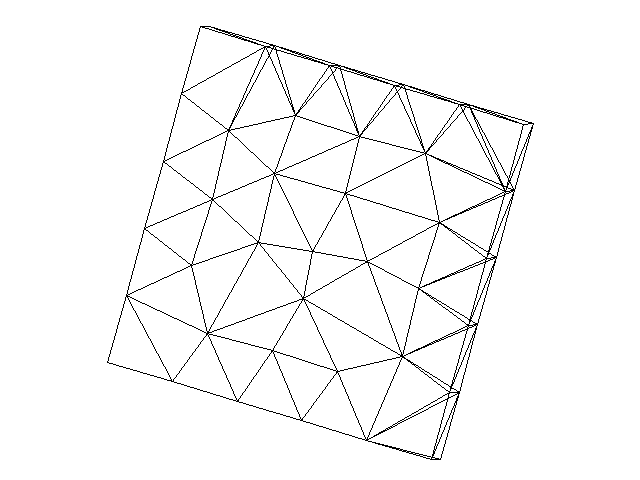
Figure 6.2-a: Le maillage de la modélisation D.
Grandeurs testées et résultats#
Les grandeurs testées sont identiques à celles présentées pour la modélisation C.
Identification |
Référence |
Type de référence |
Précision |
10^-12% |
|
DEPZON_1 |
DX |
MIN |
-0.25 |
“ANALYTIQUE” |
|
MAX |
-0.25 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
DEPZON_2 |
DX |
MIN |
-0.5 |
“ANALYTIQUE” |
10^-12% |
MAX |
-0.5 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
DEPZON_3 |
DX |
MIN |
0.75 |
“ANALYTIQUE” |
10^-12% |
MAX |
0.75 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
DEPZON_4 |
DX |
MIN |
0.75 |
“ANALYTIQUE” |
10^-12% |
MAX |
0.75 |
“ANALYTIQUE” |
10^-12% |
||
DY |
MIN |
0 |
“ANALYTIQUE” |
10^-12% |
|
MAX |
0 |
“ANALYTIQUE” |
10^-12% |
||
Tableau 6.3-1
La déformée est représentée sur la figure 6.4-a.
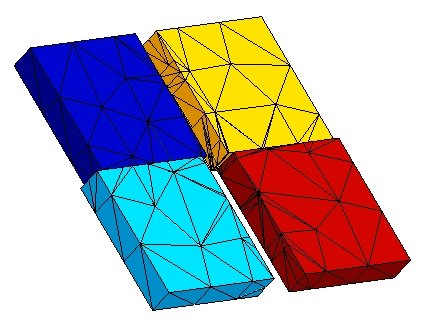
Figure 6.4-a : Déformée de la structure.
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Ee |
“ANALYTIQUE” |
0 |
On teste la valeur de \({\Vert u\Vert }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
6,84653196881 |
0.1% |
Modélisation E#
Caractéristiques de la modélisation#
Il s’agit de la même modélisation que la modélisation A, mais on applique les conditions de chargement en contact. L’intersection est construite avec X-FEM et les fonctions de niveaux de la même manière que pour la modélisation A.
Caractéristiques du maillage#
Le maillage identique à celui de la modélisation A, est représenté figure 3.2-a. Notons que les nœuds de la maille intersectée sont enrichis 3 fois, ils possèdent donc les degrés de liberté de contact \(\text{LAGS\_C}\) , \(\text{LAG2\_C}\) et \(\text{LAG3\_C}\) en plus des degrés de liberté cinématiques.
Grandeurs testées et résultats#
On teste les déplacements au niveau des lèvres des fissures après avoir effectué les opérations de post-traitements relatives à \(\text{X-FEM}\) (POST_MAIL_XFEM et POST_CHAM_XFEM). Le déplacement DX doit suivre la fonction \({u}_{x}\) de l’équation 2.2-2. Le déplacement DY doit suivre la fonction \({u}_{y}\) de l’équation 2.2-3. On obtient la déformée de la figure 7.4-a.
Identification |
Référence |
0 |
|
DEPZON_1 |
DX- \({u}_{x}\) |
MIN |
|
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DEPZON_2 |
DX- \({u}_{x}\) |
MIN |
0 |
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DEPZON_3 |
DX- \({u}_{x}\) |
MIN |
0 |
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DEPZON_4 |
DX- \({u}_{x}\) |
MIN |
0 |
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
Tableau 7.3-1
La déformée est représentée sur la figure 7.4-a. Le code couleur représente le champ de déplacement.
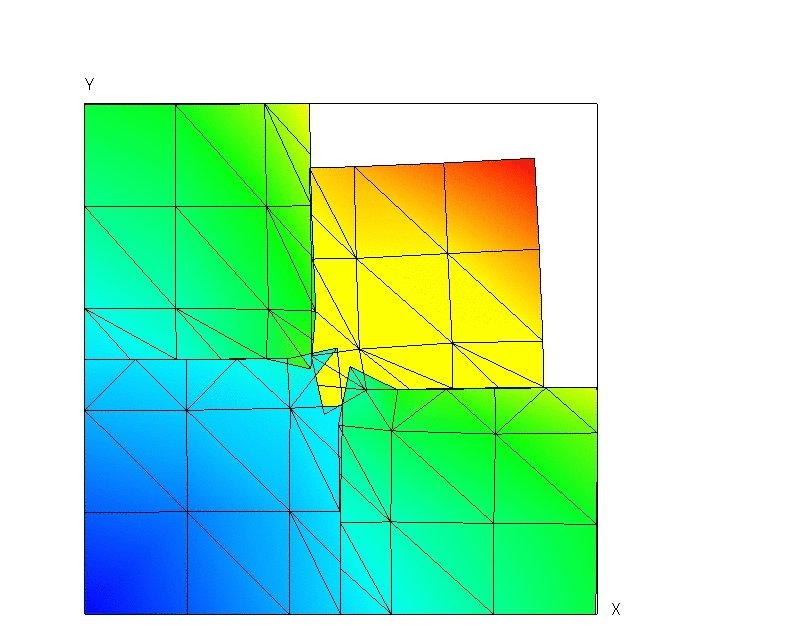
Figure 7.4-a : Déformée de la structure (exagération 10).
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR (exprimée en \(\text{J}\times {\text{m}}^{-1}\) ).
Identification |
Type de référence |
Valeur de référence |
Ee |
“ANALYTIQUE” |
1,3975 106 |
On teste la valeur de \({\Vert u\Vert }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
0,791204250915 |
0.1% |
Remarques#
On obtient une erreur élevée. En effet l’implémentation du redécoupage des facettes de contact n’a pas été implémenté. Les efforts de contact sur ces facettes ne sont pas prises en compte dans le calcul. La zone affecté concerne notamment le point d’intersection des fissures (que l’on ne teste pas) ainsi que l’élément le contenant. Notons que les résultats sont nettement améliorer lorsqu’on raffine le maillage.
Modélisation F#
Caractéristiques de la modélisation#
Il s’agit de la même modélisation que la modélisation E, mais en contraintes planes. L’intersection est construite de la même manière.
Caractéristiques du maillage#
Le maillage identique à celui de la modélisation B, est représenté sur la figure 4.2-a.
Grandeurs testées et résultats#
On teste les déplacements au niveau des lèvres des fissures après avoir effectué les opérations de post-traitements relatives à \(\text{X-FEM}\) (POST_MAIL_XFEM et POST_CHAM_XFEM). Le déplacement DX doit suivre la fonction \({u}_{x}\) de l’équation 2.2-7. Le déplacement DY doit suivre la fonction \({u}_{y}\) de l’équation 2.2-8. On obtient la déformée de la figure 7.4-a.
Identification |
Référence |
0 |
|
DEPZON_1 |
DX- \({u}_{x}\) |
MIN |
|
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DEPZON_2 |
DX- \({u}_{x}\) |
MIN |
0 |
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DEPZON_3 |
DX- \({u}_{x}\) |
MIN |
0 |
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DEPZON_4 |
DX- \({u}_{x}\) |
MIN |
0 |
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
Tableau 8.3-1
La déformée est représentée sur la figure 8.4-a.
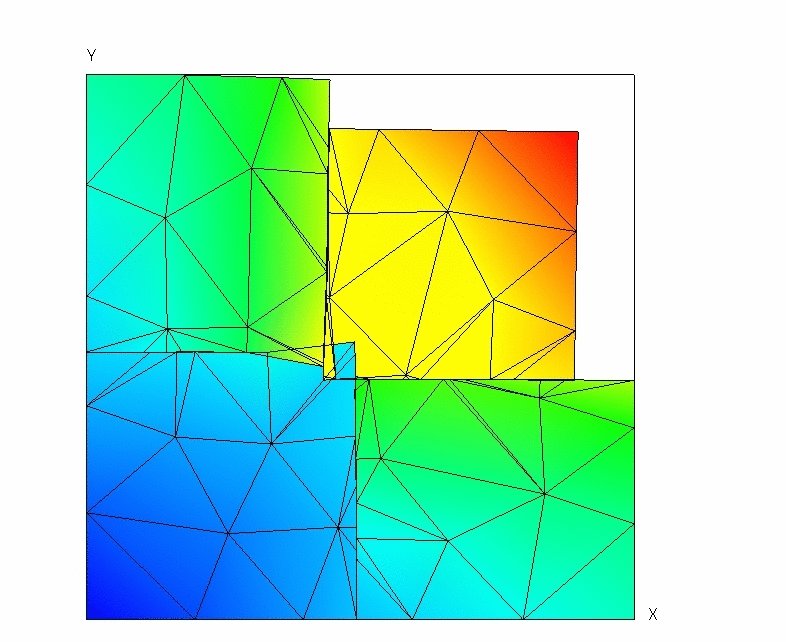
Figure 8.4-a : Déformée de la structure (exagération 10).
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR (exprimée en \(\text{J}\times {\text{m}}^{-1}\) ).
Identification |
Type de référence |
Valeur de référence |
Ee |
“ANALYTIQUE” |
1,825106 |
On teste la valeur de \({\Vert u\Vert }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
0,992051745962 |
0.1% |
Remarques#
Les remarques sont identiques à celles formulées pour la modélisation E.
Modélisation G#
Caractéristiques de la modélisation#
Il s’agit de la même modélisation que la modélisation E, mais en \(\mathrm{3D}\) . L’intersection est construite de la même manière.
Caractéristiques du maillage#
Le maillage identique à celui de la modélisation C, est représenté sur la figure 5.2-a.
Grandeurs testées et résultats#
On teste les déplacements au niveau des lèvres des fissures après avoir effectué les opérations de post-traitements relatives à \(\text{X-FEM}\) (POST_MAIL_XFEM et POST_CHAM_XFEM). Le déplacement DX doit suivre la fonction \({u}_{x}\) de l’équation 2.2-7. Le déplacement DY doit suivre la fonction \({u}_{y}\) de l’équation 2.2-8. Le déplacement DZ doit suivre la fonction \({u}_{z}\) de l’équation 2.2-9. On obtient la déformée de la figure 7.4-a.
Identification |
Référence |
0 |
|
DEPZON_1 |
DX- \({u}_{x}\) |
MIN |
|
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DZ- \({u}_{z}\) |
MIN |
0 |
|
MAX |
0 |
||
DEPZON_2 |
DX- \({u}_{x}\) |
MIN |
0 |
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DZ- \({u}_{z}\) |
MIN |
0 |
|
MAX |
0 |
||
DEPZON_3 |
DX- \({u}_{x}\) |
MIN |
0 |
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DZ- \({u}_{z}\) |
MIN |
0 |
|
MAX |
0 |
||
DEPZON_4 |
DX- \({u}_{x}\) |
MIN |
0 |
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DZ- \({u}_{z}\) |
MIN |
0 |
|
MAX |
0 |
||
Tableau 9.3-1
La déformée est représentée sur la figure 9.4-a.
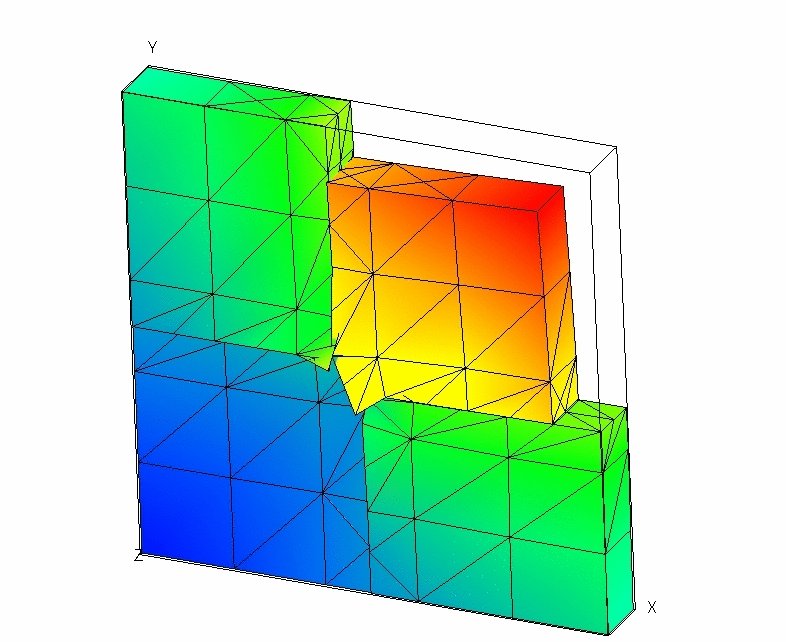
Figure 9.4-a : Déformée de la structure (exagération 10).
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR (exprimée en \(\text{J}\) ).
Identification |
Type de référence |
Valeur de référence |
Ee |
“ANALYTIQUE” |
1,825106 |
On teste la valeur de \({\Vert u\Vert }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
0,99348712456 |
0.1% |
Remarques#
Les remarques sont identiques à celles formulées pour la modélisation E.
Modélisation H#
Caractéristiques de la modélisation#
Il s’agit de la même modélisation que la modélisation G.
Caractéristiques du maillage#
Le maillage identique à celui de la modélisation D, est représenté sur la figure 6.2-a.
Grandeurs testées et résultats#
Les grandeurs testées sont identiques à celles présentées pour la modélisation G.
Identification |
Référence |
0 |
|
DEPZON_1 |
DX- \({u}_{x}\) |
MIN |
|
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DZ- \({u}_{z}\) |
MIN |
0 |
|
MAX |
0 |
||
DEPZON_2 |
DX- \({u}_{x}\) |
MIN |
0 |
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DZ- \({u}_{z}\) |
MIN |
0 |
|
MAX |
0 |
||
DEPZON_3 |
DX- \({u}_{x}\) |
MIN |
0 |
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DZ- \({u}_{z}\) |
MIN |
0 |
|
MAX |
0 |
||
DEPZON_4 |
DX- \({u}_{x}\) |
MIN |
0 |
MAX |
0 |
||
DY- \({u}_{y}\) |
MIN |
0 |
|
MAX |
0 |
||
DZ- \({u}_{z}\) |
MIN |
0 |
|
MAX |
0 |
||
Tableau 10.3-1
La déformée est représentée sur la figure 10.4-a.
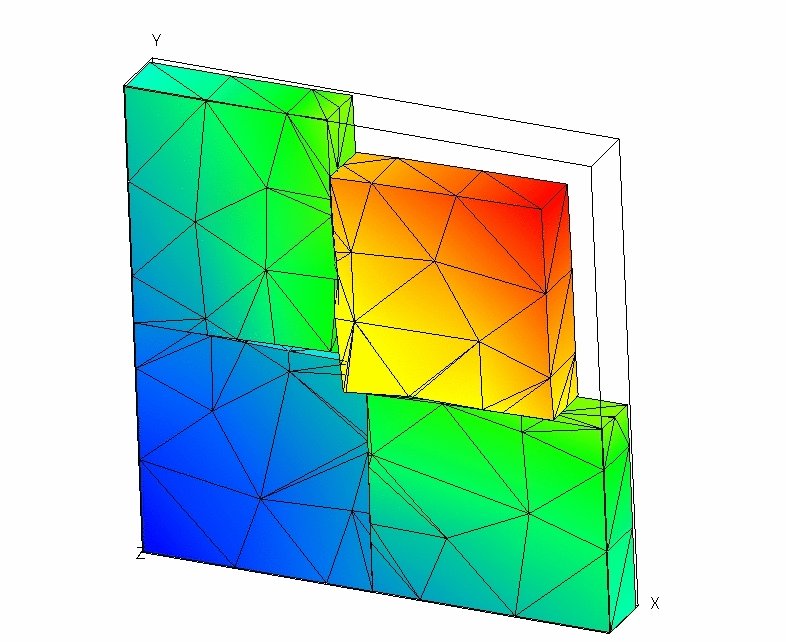
Figure 10.4-a : Déformée de la structure (exagération 10).
On teste la valeur de \({E}^{e}\) produit par l’opérateur POST_ERREUR (exprimée en \(\text{J}\) ).
Identification |
Type de référence |
Valeur de référence |
Ee |
“ANALYTIQUE” |
1,825106 |
On teste la valeur de \({\Vert u\Vert }_{{L}^{2}}\) produit par l’opérateur POST_ERREUR.
Identification |
Type de référence |
Valeur de référence |
Tolérance |
Norme L2 |
“ANALYTIQUE” |
0,99348712456 |
0.1% |
Remarques#
Les remarques sont identiques à celles formulées pour la modélisation E.
Synthèse des résultats#
La représentation de jonctions avec \(\text{X-FEM}\) permet de modéliser la cinématique d’ouverture de l’intersection de deux interfaces. Il est aussi possible de faire la même chose avec des fonds de fissures de part et d’autre de la jonction, mais il faut prendre soin d’éloigner le fond de l’intersection (environ 2 mailles pour un enrichissement topologique car on ne sait pas encore gérer la présence de Heaviside supplémentaires pour des éléments Crack-tip. Un élément Crack-tip ne peut actuellement pas «voir» plus d’une fissure à la fois).
L’approche a été validée en 2D pour des modélisations C_PLAN et D_PLAN et pour les éléments de type QUAD4 et TRIA3. On a aussi validé l’approche en 3D pour les éléments HEXA8 et TETRA4, avec et sans contact.